Предлагаемое изобретение относится к измерительным системам и может быть использовано для контроля положения подвижных железнодорожных составов.
Изобретение используется для контроля местоположения подвижного состава.
Известна система контроля положения подвижных объектов (например, подвижного железнодорожного состава заявка №62-44226 Япония), в которой вдоль пути следования подвижного объекта развернута линия индуктивной радиосвязи, имеющая N (где N>3) проводников с периодом повторения Р, расположенных со сдвигом P/N. На каждый проводник подают N-фазный электрический ток с прямой или обратной последовательностью фаз. Две транспортные антенны подвижного объекта, расположенные на некотором расстоянии друг от друга вдоль линии радиосвязи, принимают от нее сигналы. По сдвигу фаз принимаемых сигналов определяют положения объекта. В системе линия радиосвязи разделена на небольшие интервалы, соответствующие интервалам, на которые разделен весь путь следования объекта. На каждом интервале периоды повторения отличаются [1].
Недостатком системы является низкая точность определения местоположения подвижного состава.
Известна система контроля положения подвижного состава (прототип патент РФ №2139215. Система контроля положения подвижного железнодорожного состава. Опубл. 1999, Бюл. №28), содержащая n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, подвижной состав, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, выход которого соединен с информационным входом навигационного приемника, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом корректора параметра, последовательно соединенных корректора скорости, вычислителя пути и вычислителя местоположения, датчика скорости, выход которого соединен со вторым входом вычислителя местоположения, второй вход навигационного приемника соединен со вторым входом корректора скорости, третий выход навигационного приемника соединен со вторым входом вычислителя пути [2].
Недостатком данной системы является повышенная сложность ее реализации, связанная с необходимостью установки специальной аппаратуры в фиксированной точке с известными координатами и передачи поправок на подвижной состав, что может быть осуществлено только при помощи радиоканала.
Задачей предлагаемого технического решения является устранение технических недостатков, отмеченных в прототипе.
В основу изобретения положена задача создания системы, позволяющая с высокой точностью определять местоположение подвижного железнодорожного состава без использования радиоканала и установки специальной аппаратуры в фиксированной точке с известными координатами.
Поставленная задача решается тем, что в систему для контроля положения подвижного состава, содержащую n навигационных спутников, подвижной состав, состоящий из последовательно соединенных приемной антенны, навигационного приемника и корректора параметра, выход которого соединен со вторым входом навигационного приемника, первый выход которого соединен с первым входом корректора скорости, второй вход которого соединен с датчиком скорости, второй выход навигационного приемника соединен с первым входом вычислителя пути, второй вход которого соединен с корректором скорости, выход которого соединен с вычислителем местоположения вход которого соединен с блоком памяти, согласно изобретению в подвижной состав введены датчик изолированного стыка, соединенный с первым входом корректора параметра, второй вход которого соединен с блоком памяти, третий вход корректора параметра соединен с выходом вычислителя местоположения.
Существенное отличие предлагаемого технического решения заключается в том, что в подвижной состав введены датчик изолированного стыка, соединенный с первым входом корректора параметра, второй вход которого соединен с блоком памяти, третий вход корректора параметра соединен с выходом вычислителя местоположения.
Преимущество заключается в отсутствии контрольно-корректирующей станции, отсутствии радиоканала между контрольно-корректирующей станцией и подвижным составом, что значительно упрощает систему.
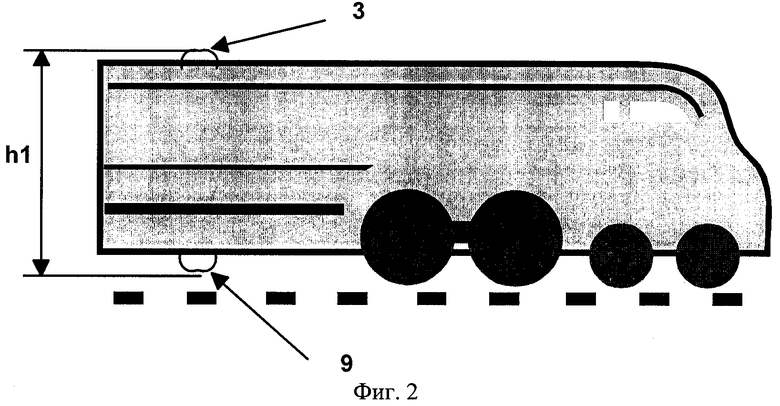
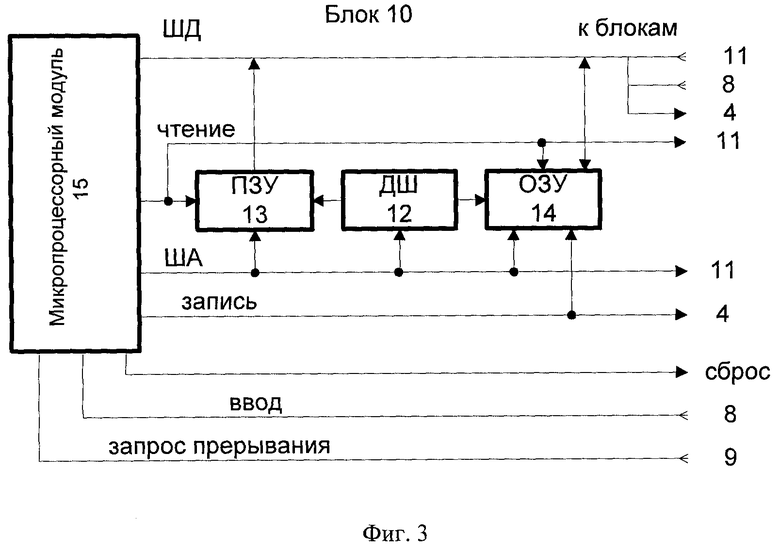
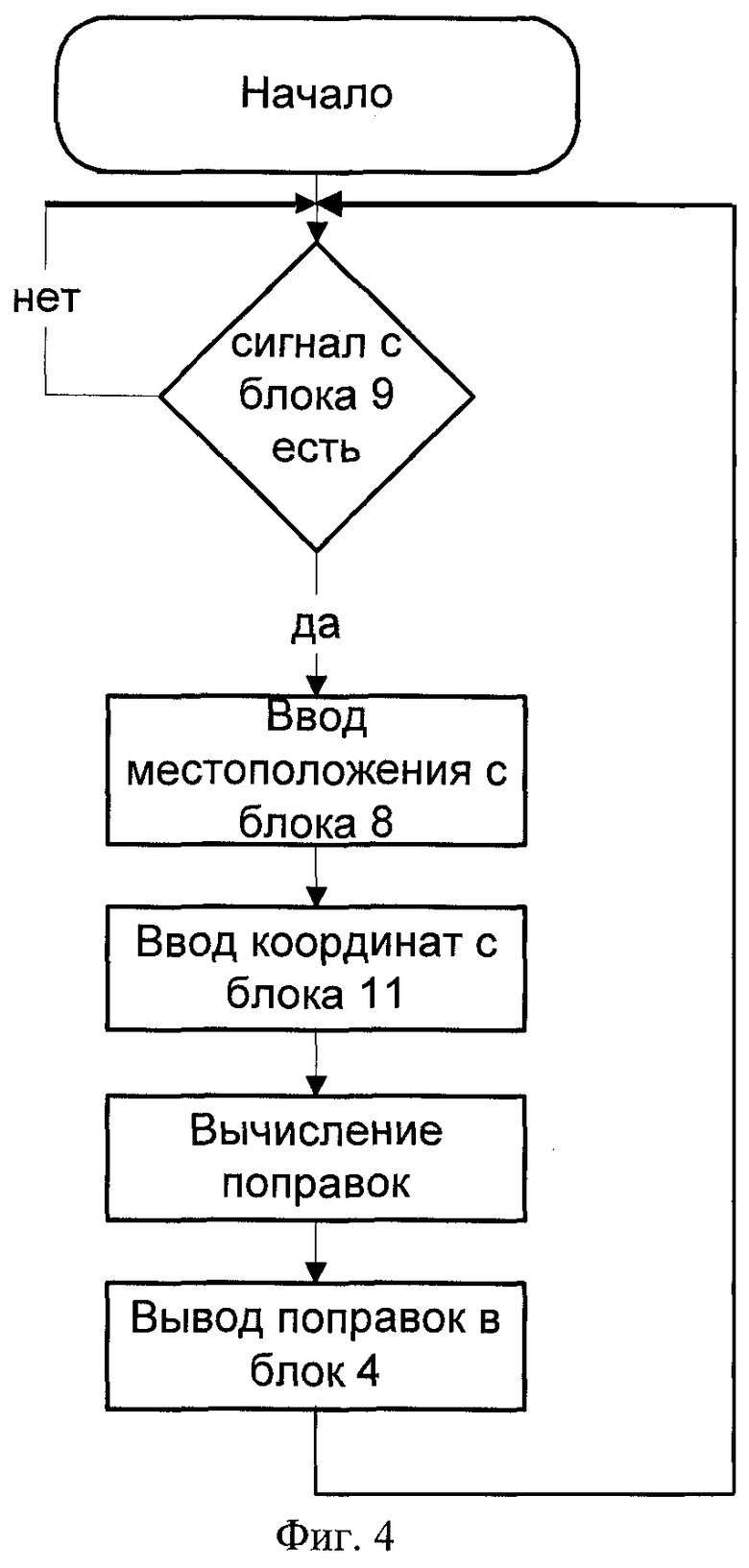
На фиг.1 приведена структурная схема системы контроля местоположения подвижного железнодорожного состава. На фиг.2 приведен пример установки на железнодорожном локомотиве антенны навигационного приемника и датчика изолированного стыка. На фиг.3 приведен вариант структурной схемы построения корректора параметра и вычислителя местоположения. На фиг.4 приведена граф-схема алгоритма работы корректора параметра.
Система содержит n навигационных спутников 11-1n, подвижной состав 2, состоящий из последовательно соединенной приемной антенны 3, навигационного приемника 4 и корректора скорости 5, ко второму входу которого подключен датчик скорости 6, к первому входу вычислителя пути 7 подключен выход корректора скорости, ко второму входу вычислителя пути 7 подключен второй выход навигационного приемника 4, выход вычислителя пути 7 подключен к входу вычислителя местоположения 8, ко второму входу навигационного приемника 4 подключены последовательно соединенные датчик изолированного стыка 9 и корректор параметра 10, ко второму входу которого подключен блок памяти 11, третий вход корректора параметра 10 соединен с выходом вычислителя местоположения 8.
Работает система следующим образом. На подвижном составе 2 антенной 3 принимаются сигналы от навигационных спутников 11-1n, например, систем "Навстар" и "ГЛО-НАСС" и обрабатываются в навигационном приемнике 4. С первого выхода навигационного приемника 4 сигналы, в которых содержится информация о времени приема навигационных сигналов, измеренных дальностях до соответствующих спутников 11-1n (R1, R2 ... Rn) поступают на второй вход корректора параметра. По измеренным дальностям навигационный приемник производит расчет координат подвижного состава [3]. При приходе с датчика изолированного стыка 9 импульса о прохождении подвижным составом 2 изолированного стыка корректор параметра 10 анализирует координаты, полученные с вычислителя местоположения 8 и выбирает из памяти координаты ближайшего изолированного стыка. В блоке памяти 11 хранятся эталонные координаты изолированных стыков и точек с неуверенным приемом сигналов от навигационных спутников. При отсутствии сигнала с навигационных спутников 11-1n из памяти выбираются координаты точки с неуверенным приемом. Координаты этих точек должны быть определены с точностью не хуже 1 метра, любым известным методом, например в дифференциальном режиме [3]. В корректоре параметра 10 осуществляется вычисление поправок к дальностям ΔR1, ΔR2, ΔRn по эталонным координатам [3]. Полученные поправки поступают на второй вход навигационного приемника 4, где по скорректированным дальностям до соответствующих спутников 11-1n (R1, R2 ... Rn) осуществляется расчет уточненных координат подвижного состава 2. Вычисленные в корректоре параметра 10 поправки к измеренным дальностям сохраняются и используются до появления нового импульса с датчика изолированного стыка 9.
С выхода датчика скорости 6, который фиксирует скорость движения V1 локомотива по числу оборотов колесной пары, сигнал поступает на первый вход корректора скорости 5. На второй вход корректора скорости 5 поступают данные о скорости движения состава V2 на основании измерения радионавигационных параметров в навигационном приемнике 4. В корректоре скорости 5 определяется погрешность измерения скорости датчиком скорости 6, т.е. ΔV=V1-V2, величина которой используется затем в корректоре скорости 5 для уточнения скорости движения Vc состава при отсутствии приема сигналов от навигационных спутников 11-1n, например, в тоннелях, т.е. Vc=V1-ΔV.
С выхода корректора скорости 5 информация о скорости Vc поступает на первый вход вычислителя пути 7. На второй вход вычислителя пути 7 поступают данные о текущем времени t от навигационного приемника 4, информация о моменте времени tc, когда нарушается прием сигналов от навигационных спутников 11-1n, например въезд железнодорожного состава в тоннель, а также данные о координатах подвижного состава 2 для момента времени tc. В вычислителе пути 7 по данным о скорости подвижного состава 2 (Vc) от блока 5 и данным о текущем времени t от блока 4 определяется пройденный составом путь от момента времени tc по формуле П=Vc·(t-tc). Информация о пройденном пути П и координатах подвижного состава 2 для времени tc поступает с выхода вычислителя пути 7 на первый вход вычислителя местоположения 8. На второй вход вычислителя местоположения 8 поступают данные от блока памяти 11. В блоке памяти 11 хранится информация о характере железнодорожного пути в тоннеле (радиус кривизны, уклон пути, длина тоннеля и т.д.). В вычислителе местоположения 8 по информации от блока 7 определяется местоположение подвижного состава 2 в тоннеле, полученные данные выводятся из вычислителя местоположения 8 на индикацию для машиниста локомотива.
Антенну 3 располагают на подвижном составе 2 так, чтобы фазовый центр антенны был расположен над центром датчика изолированного стыка на высоте h1 (фиг.2).
В памяти хранятся координаты изолированных стыков В - широта, L - долгота и Н - высота. При поступлении сигнала запрос прерывания с датчика изолированного стыка 9 на корректор параметра 10 координаты антенны 3 будут В, L, H1=H+h1. Относительно новых координат антенны 3 производится вычисление поправок к дальностям ΔR1, ΔR2, ... ΔRn.
Алгоритм расчета местоположения подвижного состава 2 по данным, полученным от навигационных спутников 11-1n приведены, например, на с. 46, 220 [3]. Алгоритм расчета местоположения подвижного состава 2 с высокой точностью на основании информации, полученной от корректора параметра 10 и переданной в навигационный приемник 4, приведены, например, на с.285-288 [3]. Алгоритмы расчета скорости движения подвижного состава 2 приведены на с.223, 235 [4].
Вычислитель пути 7, вычислитель местоположения 8, корректор параметра 10 могут быть реализованы на основе микропроцессора по типовой структурной схеме, например, на с.38 [5].
Структурная схема варианта построения блоков 7, 8, 10 приведена на фиг.2, где показано, например, подключение блоков 8, 9, 11 к блоку 10. Дешифратор 12 обеспечивает выбор постоянного 13 или оперативного 14 запоминающих устройств, в которых хранятся программа, константы или текущая информация соответственно. Микропроцессорный модуль 15 выполняет обработку и обмен информацией в соответствии с блок-схемой (фиг.4) и связан с блоком 11 шиной адреса (ША), а с блоками 4, 8, 11 информационной шиной данных (ШД), а также имеет управляющий вход "чтение" для управления постоянным запоминающим устройством (ПЗУ) 13 и оперативным запоминающим устройством (ОЗУ) 14 и выход "запись" для управления ОЗУ 14. Для чтения информации из блока памяти 11 используется шина данных (ШД), шина адреса (ША), сигнал "чтение" и управляющий выход с дешифратора адреса (ДШ) 12. Вход "запрос прерывания" используется для информирования корректора параметра 10 о прохождении подвижным составом 2 изолированного стыка и к началу выполнения блок-схемы, изображенной на фиг.4, вход "ввод" - для ввода информации из блока 4.
При реализации блоков 7, 8, 10 на базе микропроцессорного комплекта К1810 микропроцессорный модуль 15 состоит из шести интегральных микросхем - центрального процессора К1810ВМ88, тактового генератора К1810ГФ84, двух регистров К1810ИР82, шинного формирователя К1810ВА86 и дешифратора К1533ИДЗ.
Датчик изолированного стыка используется стандартный, применяемый на локомотивах типа ВЛ-80 или ВЛ-60.
Навигационный приемник 4 может быть выполнен в соответствии с рис.1.14 [7], рис.38 [4], рис.9.5 [3], рис.14.6, 14.7, 14.8 [8].
Таким образом, предлагаемое изобретение обеспечивает определение координат подвижного состава на примере железнодорожного состава с повышенной точностью с абсолютной погрешностью 3-5 метров, что дает возможность повысить точность и упростить существующие системы определения местоположения железнодорожных составов.
Литература
1. Заявка Японии №62-44226.
2. Патент РФ №2139215. Система контроля положения подвижного железнодорожного состава. Опубл. 1999, Бюл. №28.
3. Сетевые спутниковые радионавигационные системы. / Под. ред. B.C. Шебшаевича. 2-е изд., перераб. и доп. М.: Радио и связь, 1993.
4. Бортовые устройства спутниковой радионавигации. / Под. ред. B.C. Шебшаевича. М.: Транспорт, 1988.
5. Микропроцессорный комплект К1810. Структура, программирование, применение: Справочная книга / Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990.
6. Проектирование импульсных и цифровых устройств радиотехнических систем. / Под ред. Ю.М. Казаринова. М.: Высшая школа, 1985.
7. Цифровые радиоприемные системы. / Под ред. Жоджинского. М.: Радио и связь, 1990.
8. Радиотехнические системы. / Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ СОЗДАНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2195408C1 |
| НАВИГАЦИОННОЕ КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЛОКОМОТИВОВ-РЕЛЬСОСМАЗЫВАТЕЛЕЙ | 2009 |
|
RU2394716C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ РЕМОНТНЫХ БРИГАД | 2003 |
|
RU2268836C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
Изобретение относится к измерительным системам и может быть использовано для контроля положения подвижного железнодорожного состава. Система содержит: n навигационных спутников, подвижной состав, навигационный приемник, корректор параметра, корректор скорости, вычислитель пути, вычислитель местоположения, датчик изолированного стыка, соединенный с первым входом корректора параметра, второй вход которого соединен с блоком памяти, третий вход корректора параметра соединен с выходом вычислителя местоположения. Для коррекции измеренных псевдодальностей используется база данных, содержащая координаты изолированных железнодорожных стыков и точек с неуверенным приемом сигнала, например тоннелей. 4 ил.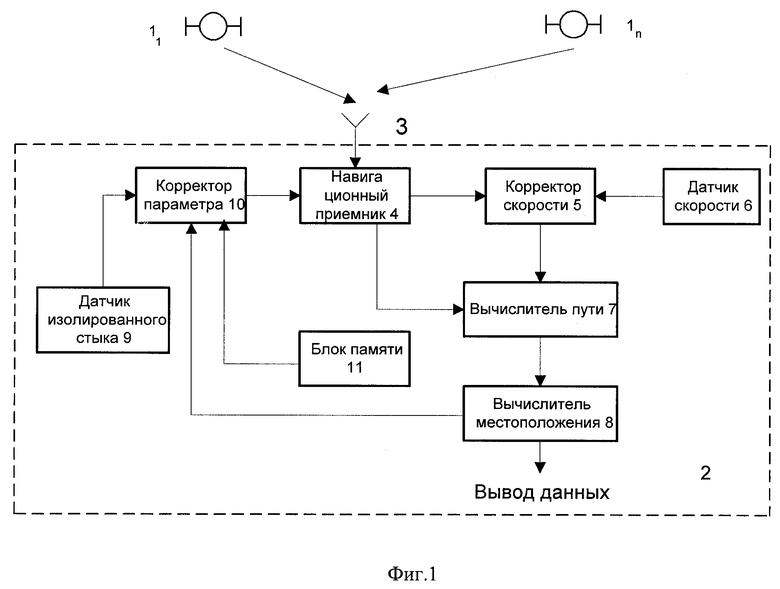
Система для контроля положения подвижного состава, содержащая n навигационных спутников, подвижной состав, состоящий из последовательно соединенных приемной антенны, навигационного приемника и корректора параметра, выход которого соединен со вторым входом навигационного приемника, первый выход которого соединен с первым входом корректора скорости, второй вход которого соединен с датчиком скорости, второй выход навигационного приемника соединен с первым входом вычислителя пути, второй вход которого соединен с корректором скорости, выход которого соединен с вычислителем местоположения, вход которого соединен с блоком памяти, отличающаяся тем, что в подвижной состав введены датчик изолированного стыка, соединенный с первым входом корректора параметра, второй вход которого соединен с блоком памяти, третий вход корректора параметра соединен с выходом вычислителя местоположения.
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННОЙ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2012896C1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| US 5867122 A1, 02.02.1999. | |||

