Соответствующие перекрестные ссылки на заявку
Данная заявка испрашивает право приоритета на заявку, представленную Акционерным обществом с ограниченной ответственностью «Грейт Уолл» (Great Wall Motor) 30 сентября 2018 года, на изобретение под названием «Способ управления автомобилем, система и автомобиль» с номером заявки на патент КНР «201811166844.8», а также на заявку, представленную Акционерным обществом с ограниченной ответственностью «Грейт Уолл» (Great Wall Motor) 30 сентября 2018 года, на изобретение под названием «Метод проецирования линии указателей для пешехода, система и автомобиль» с номером заявки на патент КНР «201811166851.8».
Область техники
Данное изобретение относится к сфере автомобильных технологий, а именно к способу управления автомобилем, системе и автомобилю.
Предыдущий уровень техники
На перекрестках дорог, где отсутствуют дорожные знаки, направляющие линии и разметка пешеходного перехода «зебра», а также на обычных участках дорог общего пользования пешеход, как правило, не может предвидеть намерения водителя приближающегося к нему автомобиля. Иногда намерение водителя уступить дорогу не сразу может быть замечено пешеходом, что может приводить к возникновению ДТП вследствие одновременных попыток пересечь этот участок пешеходом и автомобилем или к возникновению затора движения.
В родственной технологии имеется возможность с помощью видеокамеры, радара миллиметрового диапазона или других датчиков идентифицировать пешехода и дорожную информацию, например: в случае обнаружения впереди пешехода, основываясь на дорожной обстановке, для пешехода проецируется соответствующий направляющий указатель. Однако при этом существует следующая проблема: после отображения проекции направляющего указателя для пешехода и после того, как пешеход начал преимущественное движение вдоль направляющего указателя, вследствие ошибочного действия водителя, в том числе использования педали газа вместо педали тормоза, может произойти дорожно-транспортное происшествие.
Сущность изобретения
Принимая во внимание вышесказанное, целью данного изобретения является представить способ управления автомобилем. Данный способ управления автомобилем позволяет обнаруживать впереди автомобиля пешехода и, если обстановка соответствует условиям проецирования, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги, что повышает безопасность для автомобиля и пешехода.
Чтобы достичь вышеуказанной цели, техническое решение по данному изобретению реализуется следующим образом:
Способ управления автомобилем включает в себя следующую последовательность: выполняется контроль наличия пешеходов перед автомобилем; если пешеход обнаружен, то выполняется определение того, соответствует ли состояние автомобиля условиям создания проекции; если соответствует, то в зоне расположения упомянутого пешехода создается проекция линии указателей, указывающая на приоритет движения пешехода.
Далее, одновременно с созданием проекции линии указателей для пешехода в зоне расположения упомянутого пешехода для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля.
Далее, упомянутое определение соответствия состояния автомобиля условиям создания проекции включает в себя выполняющееся на основании скорости автомобиля и ускорения автомобиля определение наличия возможности уступить дорогу пешеходу; если такая возможность имеется, то это определяется как соответствие вышеупомянутым условиям создания проекции.
Далее, упомянутое выполняющееся на основании скорости автомобиля и ускорения автомобиля определение наличия возможности уступить дорогу пешеходу включает в себя определение того, является ли упомянутая скорость движения автомобиля меньше предварительно заданного значения скорости; если является, то далее в соответствии с упомянутым ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления; если автомобиль находится в состоянии замедления, то это определяется как наличие возможности уступить дорогу пешеходу.
Далее, также включает в себя получение настраиваемого пользователем режима проекции, в том числе упомянутый режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции; в том числе, когда задействован активный режим проекции, пассивный режим проекции или режим проекции по разрешению, в зоне расположения упомянутого пешехода с применением соответствующего способа проекции создается проекция линии указателей для пешехода; когда задействован режим запрета проекции, то в зоне расположения упомянутого пешехода проекция линии указателей не создается.
Далее, также включает в себя контроль наличия упомянутого пешехода в зоне обнаружения; если определяется, что упомянутый пешеход не пересек зону обнаружения, в этом случае в зоне расположения упомянутого пешехода продолжается проецирование линии указателей для пешехода, при этом для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля; отсутствие упомянутого пешехода в упомянутой зоне обнаружения определяется как подтверждение того, что упомянутый пешеход пересек зону обнаружения, в этом случае проецирование линии указателей в зоне расположения упомянутого пешехода прекращается.
Далее, действия после выполнения контроля наличия пешеходов перед автомобилем включают в себя следующее: если пешеход обнаружен, то далее определяется скорость и ускорение автомобиля, в соответствии со скоростью автомобиля и ускорением автомобиля определяется наличие возможности уступить дорогу пешеходу; если такая возможность имеется, то в зоне расположения упомянутого пешехода создается проекция линии указателей, указывающая на приоритет движения пешехода.
Далее, упомянутое создание в зоне расположения пешехода проекции линии указателей для пешехода, указывающей на приоритет движения пешехода, включает в себя определение того, находится ли промежуток между упомянутым пешеходом и автомобилем в зоне создания проекции; если находится, то в соответствии с изменением местоположения упомянутого пешехода перед упомянутым пешеходом создается проекция линии указателей пересечения дороги, указывающая на приоритет движения пешехода.
Далее, действия после получения настраиваемого пользователем режима проекции, в том числе активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции, включают в себя следующее: в соответствии с настраиваемым пользователем режимом проекции в зоне расположения упомянутого пешехода создается проекция линии указателей для пешехода. При этом, когда задействован активный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу; когда задействован пассивный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу, если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу и получения соответствующего отклика от водителя; когда задействован режим запрета проекции, отображение проекции запрещено.
Далее, способ управления, характеризующийся тем, что упомянутое создание в зоне расположения пешехода проекции линии указателей для пешехода, включает в себя управление миганием упомянутой проекции линии указателей для пешехода.
Способ управления автомобилем по данному изобретению, который позволяет обнаруживать пешехода впереди автомобиля и, если обстановка соответствует условиям проецирования, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги, что повышает безопасность для автомобиля и пешехода.
Кроме этого, данный способ также осуществляет контроль ограничения скорости движения автомобиля, эффективно предотвращая ошибки в действиях водителя, которые могут привести к ускорению автомобиля и столкновению с пешеходом, за счет чего повышается безопасность автомобиля и пешехода.
Второй целью данного изобретения является представить систему управления автомобилем. Данная система позволяет обнаруживать впереди автомобиля пешехода и, если обстановка соответствует условиям создания проекции, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги, что повышает безопасность для автомобиля и пешехода.
Чтобы достичь вышеуказанной цели, техническое решение по данному изобретению реализуется следующим образом:
Система управления автомобилем, включающая в себя модуль контроля, который используется для контроля наличия пешеходов перед автомобилем; модуль проецирования, который после обнаружения модулем контроля пешехода впереди автомобиля используется для того, чтобы в соответствии с состоянием автомобиля определять соответствие условиям создания проекции, и после определения того, что состояние автомобиля удовлетворяет упомянутым условиям создания проекции, используется для создания в зоне расположения упомянутого пешехода проекции линии указателей для пешехода, указывающей на приоритет движения пешехода.
Далее, система управления также включает в себя модуль управления, который используется для того, чтобы одновременно с созданием упомянутым модулем проецирования проекции линии указателей для пешехода в зоне расположения упомянутого пешехода осуществлять для упомянутого автомобиля контроль ограничения скорости, препятствующий ускорению автомобиля.
Далее, упомянутый модуль проецирования используется для того, чтобы на основании скорости и ускорения автомобиля определять наличие возможности уступить дорогу пешеходу; если такая возможность имеется, то это определяется как соответствие вышеупомянутым условиям создания проекции.
Далее, упомянутый модуль проецирования используется для определения того, является ли упомянутая скорость движения автомобиля меньше предварительно заданного значения скорости; если является, то далее в соответствии с упомянутым ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления; если автомобиль находится в состоянии замедления, то это определяется как наличие возможности уступить дорогу пешеходу.
Далее, упомянутый модуль управления также используется для обнаружения упомянутого пешехода в зоне обнаружения; обнаружение пешехода определяется как подтверждение того, что упомянутый пешеход не пересек зону обнаружения, в этом случае посредством упомянутого модуля проецирования в зоне расположения упомянутого пешехода продолжается проецирование линии указателей для пешехода, при этом для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля; отсутствие упомянутого пешехода в упомянутой зоне обнаружения определяется как подтверждение того, что упомянутый пешеход пересек зону обнаружения, в этом случае проецирование линии указателей в зоне расположения упомянутого пешехода посредством упомянутого модуля проецирования прекращается.
Далее, система управления также включает в себя модуль определения намерений водителя, который после обнаружения модулем контроля пешехода впереди автомобиля используется для того, чтобы на основании скорости и ускорения автомобиля определять наличие возможности уступить дорогу пешеходу; упомянутый модуль проецирования также используется для того, чтобы после определения модулем определения намерений водителя наличия возможности уступить дорогу пешеходу создавать в зоне расположения упомянутого пешехода проекцию линии указателей для пешехода, указывающую на приоритет движения пешехода.
Далее, упомянутый модуль проецирования используется для того, чтобы в случае если промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции, в соответствии с изменением местоположения упомянутого пешехода создавать перед упомянутым пешеходом проекцию линии указателей пересечения дороги, указывающую на приоритет движения пешехода.
Далее, упомянутый модуль проецирования также используется для того, чтобы в соответствии с настраиваемым пользователем режимом проекции в зоне расположения упомянутого пешехода создавать проекцию линии указателей для пешехода; упомянутый режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции. При этом, когда задействован активный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу; когда задействован пассивный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу, если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу и получения соответствующего отклика от водителя; когда задействован режим запрета проекции, отображение проекции запрещено.
Преимущества, которые имеет упомянутая система управления автомобилем в сравнении с предшествующим уровнем техники, аналогичны преимуществам упомянутого способа управления автомобилем и здесь подробно не описываются.
Третьей целью данного изобретения является представить автомобиль, который позволяет обнаруживать впереди автомобиля пешехода и, если обстановка соответствует условиям создания проекции, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги, что повышает безопасность для автомобиля и пешехода.
Чтобы достичь вышеуказанной цели, техническое решение по данному изобретению реализуется следующим образом:
Автомобиль, на котором установлена система управления автомобилем, упомянутая в любом из вышеизложенных вариантов реализации.
Преимущества, которые имеет упомянутый автомобиль в сравнении с предшествующим уровнем техники, аналогичны преимуществам упомянутой системы управления автомобилем и здесь подробно не описываются.
Варианты реализации, описанные в третьем и четвертом аспектах в составе данной заявки, раскрывают машиночитаемую среду, в которой хранится программа для управления автомобилем. Данная программа управления автомобилем при ее выполнении компьютерным процессором реализует упомянутый в первом аспекте способ управления автомобилем.
Дополнительные аспекты и преимущества данной заявки частично представлены в нижеприведенном описании, а некоторые станут очевидными из нижеприведенного описания или будут поняты при практическом применении настоящей заявки.
Описание чертежей
Являющиеся составной частью данного изобретения прилагаемые изображения используются для цели дополнительного разъяснения содержания данного изобретения, содержащиеся в данном изобретении наглядные варианты реализации и пояснения к ним предназначены для разъяснения содержания данного изобретения и не создают для него каких-либо неправомерных ограничений. Прилагаемые изображения включают в себя:
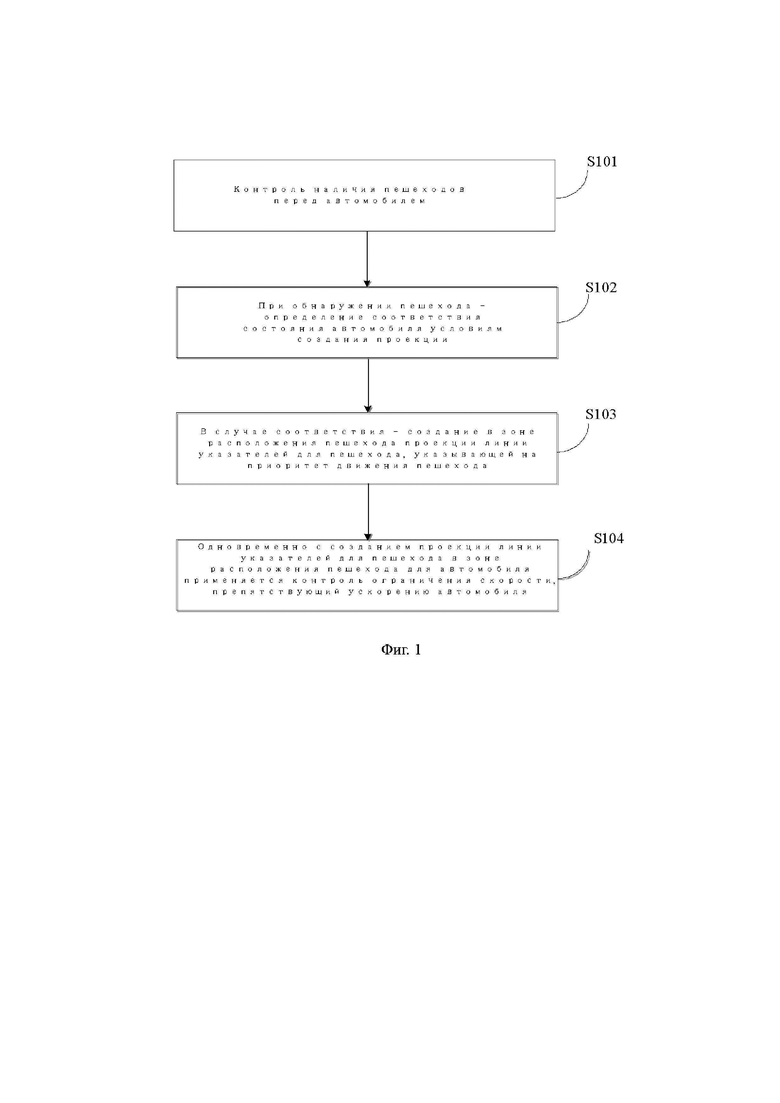
Фиг. 1, на которой представлена схема последовательности операций упомянутого способа управления автомобилем по одному из примеров реализации данного изобретения;
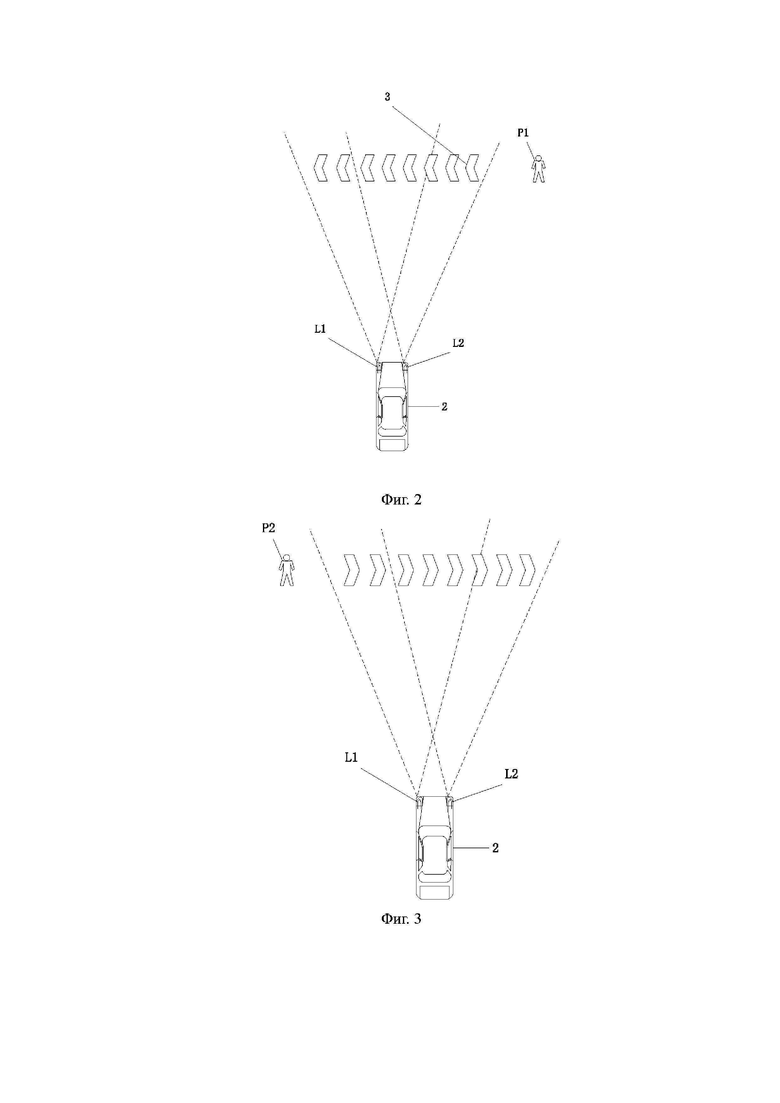
Фиг. 2, на которой представлен упомянутый способ проецирования линии указателей по одному из примеров реализации данного изобретения, когда пешеход переходит дорогу с правой стороны;
Фиг. 3, на которой представлен упомянутый способ проецирования линии указателей по одному из примеров реализации данного изобретения, когда пешеход переходит дорогу с левой стороны;
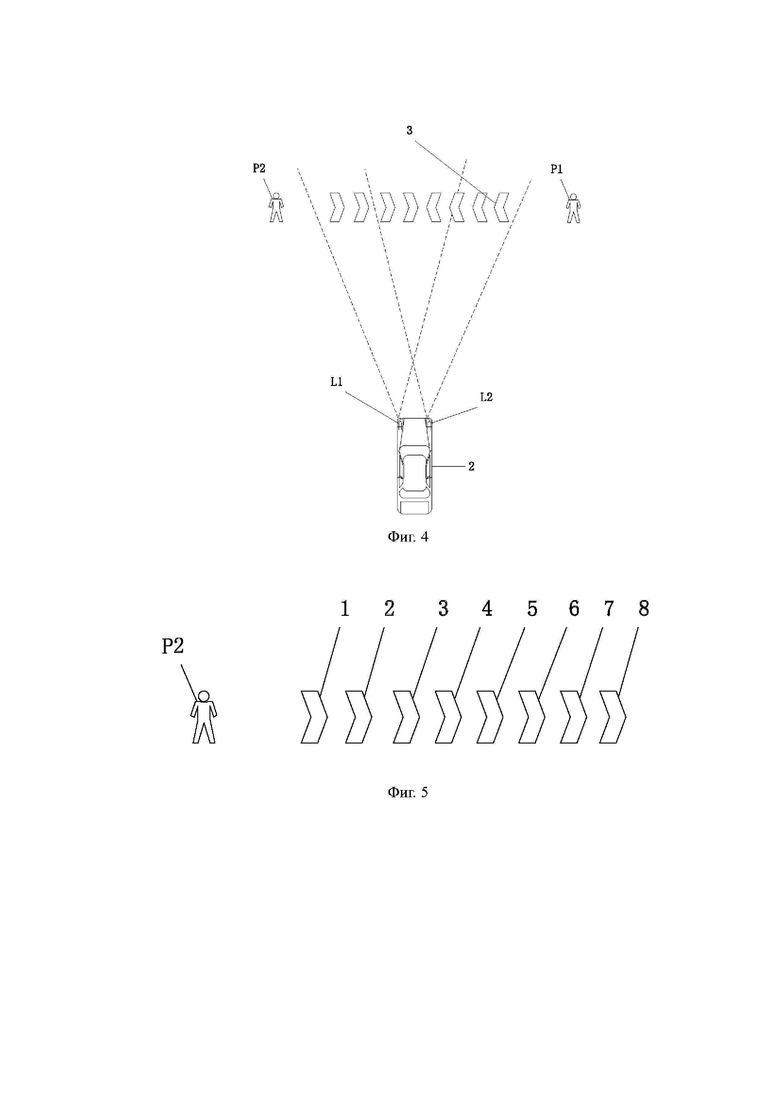
Фиг. 4, на которой представлен упомянутый способ проецирования линий-указателей по одному из примеров реализации данного изобретения, когда пешеходы переходят дорогу с обоих сторон;
Фиг. 5, на которой представлена схема линии указателей по одному из примеров реализации данного изобретения, когда пешеход переходит дорогу с левой стороны;
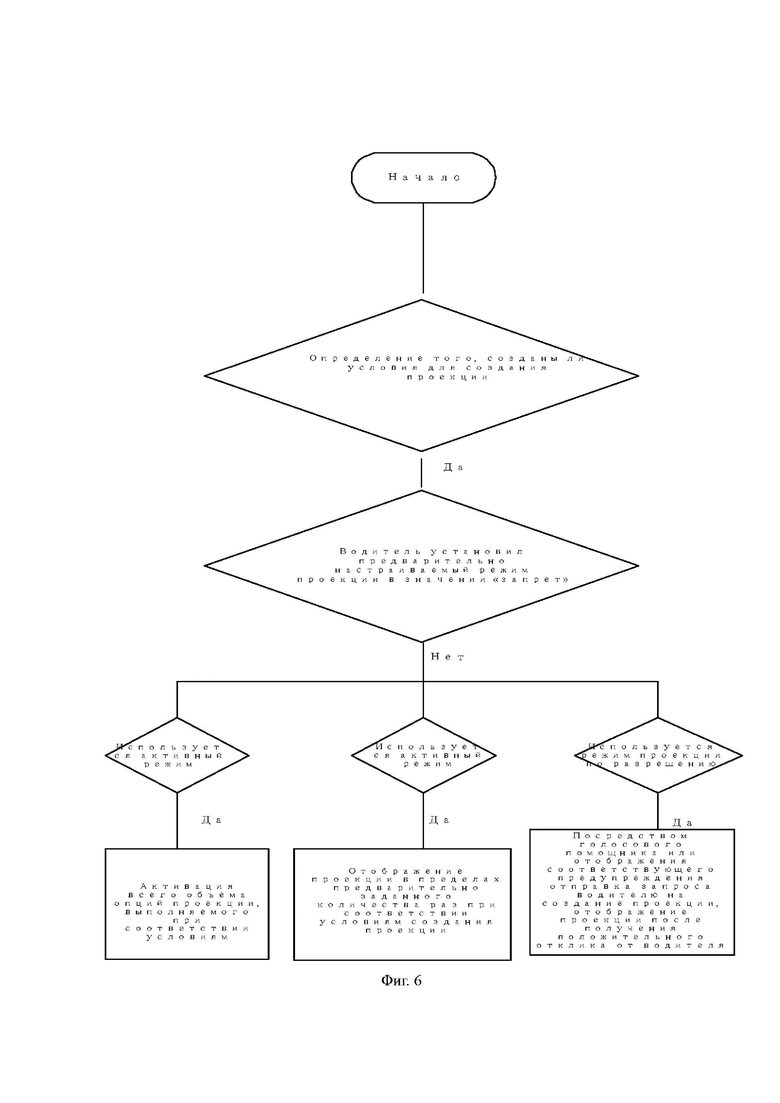
Фиг. 6, на которой представлена логика управления проекцией упомянутых линий-указателей по одному из примеров реализации данного изобретения;
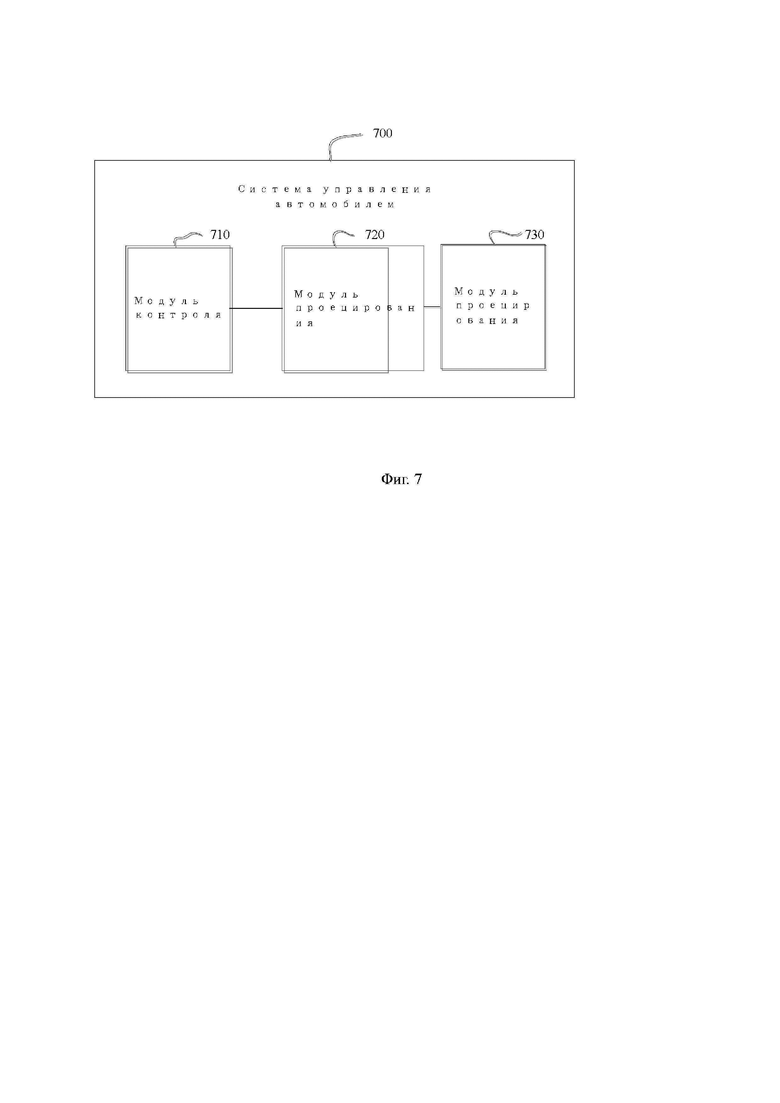
Фиг. 7, на которой представлена блок-схема структуры упомянутой системы управления автомобилем по одному из примеров реализации данного изобретения;
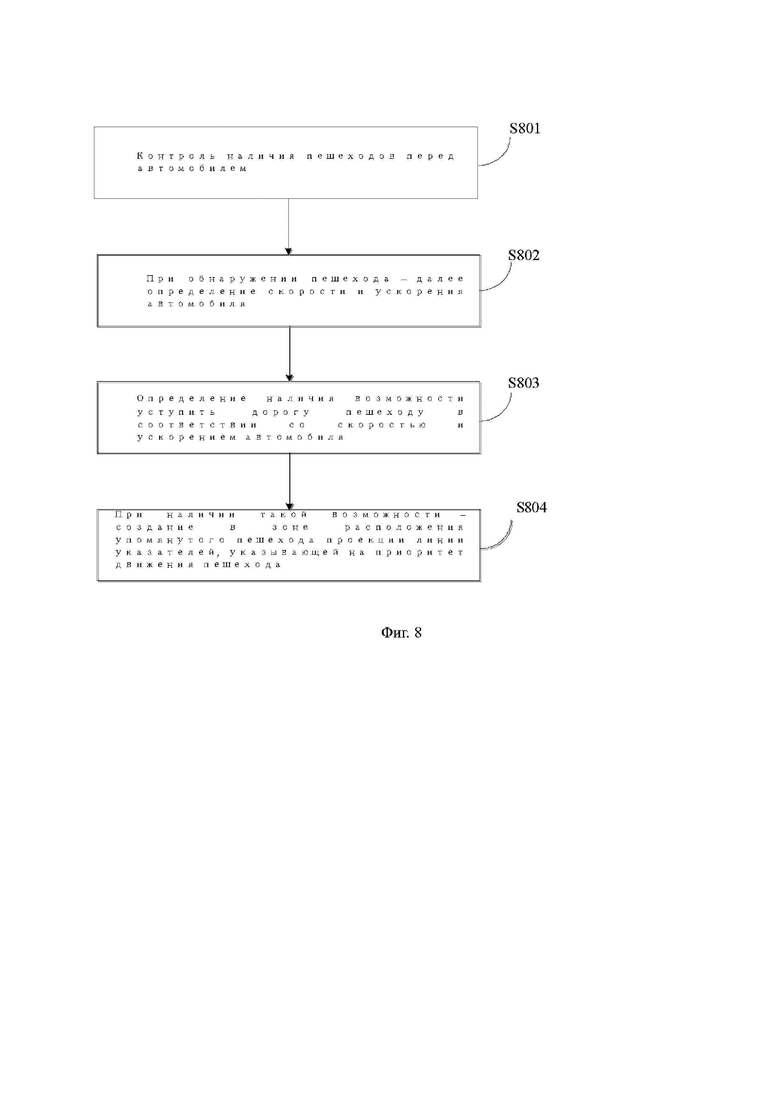
Фиг. 8, на которой представлена схема последовательности операций упомянутого способа управления автомобилем по другому примеру реализации данного изобретения.
Конкретные варианты реализации
Необходимо пояснить, что при отсутствии разногласий приведенные в данном изобретении варианты реализации и приведенные в примерах реализации признаки могут взаимно сочетаться.
Далее со ссылкой на изображения и варианты реализации представлено подробное описание данного изобретения. Фиг. 1 представляет собой схему последовательности операций способа управления автомобилем по одному из примеров реализации данного изобретения. На Фиг. 1 представлен способ управления автомобилем по одному из примеров реализации данного изобретения, который включает в себя следующую последовательность:
S101: контроль наличия пешеходов перед автомобилем.
С помощью установленных на автомобиле датчиков для обнаружения пешеходов и датчиков расстояния осуществляется контроль наличия пешеходов перед автомобилем; с помощью соответствующего алгоритма выполняется расчет позиции расположенного перед автомобилем пешехода и расстояния между этим пешеходом и автомобилем; также с помощью датчиков осуществляется контроль наличия впереди дорожных знаков, разметки пешеходного перехода «зебра» и других имеющихся линий разметки.
В том числе использующиеся для контроля наличия пешеходов датчики включают, но не ограничиваются видеокамерой, радаром миллиметрового диапазона и лазерным дальномером. Очевидно, что ультразвуковой радар при определенных условиях также можно использовать для обнаружения пешеходов.
S102: при обнаружении пешехода определение соответствия состояния автомобиля условиям создания проекции.
В конкретном варианте реализации после обнаружения впереди автомобиля пешехода далее на основании скорости автомобиля и ускорения автомобиля определяется наличие возможности уступить дорогу пешеходу; если такая возможность имеется, то это определяется как соответствие условиям создания проекции.
В том числе скорость движения автомобиля может быть получена путем перерасчета скорости вращения колеса, полученного от датчика скорости вращения колеса. Очевидно, что скорость движения автомобиля может быть измерена непосредственно датчиком скорости. Ускорение автомобиля может быть получено расчетом, исходя из скорости движения автомобиля в реальном времени.
Необходимо пояснить, что когда автомобиль движется с ускорением, его ускорение имеет положительное значение; а когда автомобиль движется с замедлением, его ускорение имеет отрицательное значение.
Выполняющееся на основании скорости и ускорения автомобиля определение наличия возможности уступить дорогу пешеходу включает в себя определение того, является ли скорость движения автомобиля меньше предварительно заданного значения скорости; если является, то далее в соответствии с ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления; если автомобиль находится в состоянии замедления, то это определяется как наличие возможности уступить дорогу пешеходу.
Необходимо понимать, что при использовании водителем педали газа или педали тормоза автомобиль будет находиться соответственно в ускорении или замедлении. Если водителем задается относительно высокая скорость движения автомобиля, и при этом не выполняется каких-либо четких операций по снижению скорости, а ускорение автомобиля имеет положительное значение, это свидетельствует о том, что в данный момент водитель не намерен уступать дорогу пешеходу, то есть состояние автомобиля не соответствует условиям создания проекции. Если водителем задается относительно низкая скорость движения автомобиля, например, ниже предварительно заданной скорости движения, и при этом ускорение автомобиля имеет отрицательное значение, то это свидетельствует о том, что водитель имеет намерение уступить дорогу пешеходу; такое состояние автомобиля определяется как соответствие условиям создания проекции.
Необходимо пояснить, что предварительно задаваемая скорость движения автомобиля может быть настроена в значении около 20 км/ч, то есть если автомобиль движется с относительно высокой скоростью, которая превышает предварительно заданную скорость, даже если ускорение автомобиля имеет отрицательное значение, скорее всего, водитель не желает уступать дорогу пешеходу, а просто хочет пересечь участок на соответствующей низкой скорости. Поэтому только в ситуации, когда автомобиль движется с относительно низкой скоростью, и при этом ускорение автомобиля имеет отрицательное значение, велика вероятность того, что водитель желает уступить дорогу пешеходу.
S103: если определена возможность уступить дорогу пешеходу, то в зоне расположения упомянутого пешехода создается проекция линии указателей, указывающая на приоритет движения пешехода.
Как правило, проекция линии указателей для пешехода будет отображаться только в том случае, если при приближении автомобиля к пешеходу водитель имеет намерение уступить ему дорогу. Поэтому в конкретном варианте реализации после того, как автомобиль определит, что водитель имеет намерение уступить пешеходу дорогу, то есть определит, что состояние автомобиля соответствует условиям создания проекции, далее выполняется определение того, находится ли промежуток между упомянутым пешеходом и автомобилем в зоне создания проекции; если находится, то в соответствии с изменением местоположения пешехода перед упомянутым пешеходом создается проекция линии указателей пересечения дороги, указывающая на приоритет движения пешехода. То есть если промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции (например, 10 м), это означает, что автомобиль располагается относительно близко к пешеходу. Очевидно, что расстояние 10 м приведено исключительно в качестве примера, и никаким образом не ограничивает область защиты данного изобретения.
Кроме этого, проекция линии указателей должна отображаться в зоне расположения упомянутого пешехода в соответствии с настраиваемым пользователем режимом проекции; режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции; в том числе, когда задействован активный режим проекции, пассивный режим проекции или режим проекции по разрешению, то в зоне расположения упомянутого пешехода с применением соответствующего способа проекции создается проекция линии указателей для пешехода; когда задействован режим запрета проекции, то в зоне расположения упомянутого пешехода проекция линии указателей не создается.
В том числе, когда задействован активный режим проекции, отображение проекции выполняется после определения того, что водитель намерен уступить дорогу пешеходу, то есть после определения того, что состояние автомобиля соответствует условиям создания проекции. Когда задействован пассивный режим проекции, отображение проекции выполняется после определения того, что водитель намерен уступить дорогу пешеходу, и если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения того, что водитель намерен уступить дорогу пешеходу, и получения от водителя согласия создать проекцию; когда задействован режим запрета проекции, отображение проекции запрещено.
На Фиг. 6 представлена логика управления проекцией линии указателей, то есть когда режим проекции задан водителем в значении «активный», линия указателей для пешехода будет отображаться, когда функция включена, и соблюдены условия для запуска проекции. Когда режим проекции задан в значении «пассивный», то при движении автомобиля в таком режиме от момента начала движения до его остановки даже при включенной функции и выполнении условий для запуска проекция будет отображаться ограниченное количество раз. Например: количество циклов отображения проекции предварительно настроено в значении n. В этом случае после создания условий для запуска проекции проецирование будет воспроизведено первые n раз; когда количество циклов отображения проекции превысит n, произойдет выключение этой функции. Когда режим проекции задан в значении «по разрешению», то каждый раз при возникновении условий для запуска проекции посредством голосового помощника или отображения соответствующего предупреждения водителю будет представлен запрос на создание проекции; в этом случае проецирование выполняется в зависимости от ответа водителя. Когда режим проекции задан в значении «запрет», создание проекции не выполняется и запросы не предоставляются.
В том числе, условия для запуска представляют собой следующее: скорость движения автомобиля ниже предварительно заданной скорости движения, при этом автомобиль находится в состоянии замедления; перед автомобилем обнаружен пешеход, при этом промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции; режим проекции не задан водителем в значении «запрет».
Способ управления автомобилем в соответствии с примером реализации данного изобретения позволяет обнаруживать впереди автомобиля пешехода и, если обстановка соответствует условиям проецирования, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги, что повышает безопасность для автомобиля и пешехода.
Далее, как показано на Фиг. 1, данный способ может дополнительно включать:
S104: одновременно с созданием проекции линии указателей для пешехода в зоне расположения пешехода для автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля.
Создание проекции линии указателей для пешехода в зоне расположения пешехода демонстрирует, что автомобиль уступает пешеходу право приоритетного пересечения дороги. В этот момент для автомобиля действует контроль ограничения скорости, препятствующий возникновение риска столкновения с пешеходом вследствие ускорения автомобиля.
Следует понимать, что когда автомобиль медленно двигается вперед с ограниченной скоростью, перемещение автомобиля создает необходимость соответствующей корректировки расположения линии указателей таким образом, чтобы она продолжала располагаться прямо перед пешеходом до тех пор, пока он не покинет зону проекции.
Когда датчики автомобиля не обнаруживают впереди какой-либо разметки или знаков, включая, но не ограничиваясь разметкой пешеходного перехода «зебра», дорожными знаками и линиями движения пешеходов, а режим проекции задан в значении «активный», то в соответствии со способом управления автомобилем используются следующая стратегия управления: как показано на Фиг. 2, когда пешеход Р1 с правой стороны входит в поле зрения видеокамеры автомобиля 2, водитель, чтобы уступить дорогу пешеходу, снижает скорость и останавливает автомобиль, чтобы скорость движения автомобиля стала ниже предварительно заданной скорости движения. Например, предварительно заданная скорость движения составляет 20 км/ч, при этом, исходя из значения ускорения автомобиля, получены данные о том, что автомобиль находится в состоянии замедления; в этом случае пиксельные фары L1 и L2 проецируют перед пешеходом линию указателей 3 траектории пересечения дороги пешеходом, обозначая направление его движения. Как показано на Фиг. 2, линия указателей 3 указывает пешеходу Р1 направление движения влево, демонстрируя пешеходу, что в данный момент автомобиль уступает ему дорогу; намерение водителя пропустить пешехода используется в качестве визуализированного взаимодействия человек-машина. В этот период, вплоть до момента, пока пешеход безопасно не пересечет участок дороги впереди автомобиля, автомобиль будет находиться под действием контроля ограничения движения, который препятствует его ускорению. Однако если водитель в этот момент не снизил скорость движения ниже предварительно заданной скорости движения, или если после того, как видеокамера обнаружила пешехода, водитель не предпринял каких-либо четких действий для замедления, это означает, что водитель не имеет намерения уступать дорогу пешеходу. Такое состояние автомобиля определяется как не соответствующее условиям создания проекции, в результате чего автомобиль не создает проекцию.
Как показано на Фиг. 3 и Фиг. 4, способ управления автомобилем позволяет в соответствии с направлениями движения пешеходов с двух сторон дороги проецировать соответствующие направления линий указателей. В этом случае для пешехода с правой стороны проецируется линия указателей с направлением движения влево, а для пешехода с левой стороны проецируется линия указателей с направлением движения вправо. В будущем эта функция также может использоваться для визуализации взаимодействия человек-машина при беспилотном управлении автомобилем. Находящийся в режиме беспилотного управления автомобиль при обнаружении впереди переходящего дорогу пешехода должен замедлить движение, остановиться и создать проекцию линии указателей для пешехода, информируя пешехода о том, что в данный момент находящийся в режиме беспилотного управления автомобиль уступает ему дорогу и предлагает своевременно перейти участок дороги перед ним; одновременно с этим для автомобиля применяется контроль ограничения скорости.
Кроме этого, в качестве способа проекции линии указателей может использоваться динамическая проекция. Как показано на Фиг. 5, линия указателей включает, но не ограничивается 8 блоками, которые поочередно гаснут в последовательности от 1 до 8, то есть одновременно с выключением проекции блока линии указателей №1 включается проекция блока линии указателей №2, далее по аналогии. Таким образом, блоки линии указателей поочередно загораются в направлении движения пешехода, предлагая ему начать движение вперед. Временной интервал последовательного включения блоков линии указателей составляет, но не ограничивается 0,5 секунды. В соответствии с представленной на Фиг. 5 нумерацией блоков линии указателей может использоваться следующая последовательность их включения: 2345678→1345678→1245678→1235678→1234678, то есть осуществляется контроль мигания проецируемой для пешехода линии указателей.
Далее, одновременно с проецированием линии указателей для пешехода выполняется контроль наличия пешехода в зоне обнаружения; если определяется, что упомянутый пешеход не пересек зону обнаружения, в этом случае в зоне расположения упомянутого пешехода продолжается проецирование линии указателей для пешехода, при этом для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля; отсутствие пешехода в зоне обнаружения определяется как подтверждение того, что упомянутый пешеход пересек зону обнаружения, в этом случае проецирование линии указателей в зоне расположения упомянутого пешехода прекращается.
В конкретном варианте реализации, после того как пешеход успешно пересек зону обнаружения, также можно отменить контроль ограничения скорости для автомобиля, то есть разрешить автомобилю ускорение и замедление в нормальном режиме.
Способ управления автомобилем в соответствии с примером реализации данного изобретения позволяет обнаруживать впереди автомобиля пешехода и, если обстановка соответствует условиям проецирования, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги. Одновременно с этим осуществляется контроль ограничения скорости движения автомобиля, эффективно предотвращая ошибки в действиях водителя, которые могут привести к ускорению автомобиля и столкновению с пешеходом, что повышает безопасность для автомобиля и пешехода.
На Фиг. 8 представлен способ управления автомобилем по одному из примеров реализации данного изобретения, который включает в себя следующую последовательность:
S801: контроль наличия пешеходов перед автомобилем.
S802: при обнаружении пешехода далее выполняется определение скорости движения и ускорения автомобиля.
После обнаружения впереди автомобиля пешехода далее выполняется определение скорости движения и ускорения автомобиля.
В том числе скорость движения автомобиля может быть получена путем перерасчета скорости вращения колеса, полученного от датчика скорости вращения колеса. Очевидно, что скорость движения автомобиля может быть измерена непосредственно датчиком скорости. Ускорение автомобиля может быть получено расчетом, исходя из скорости движения автомобиля в реальном времени.
Необходимо пояснить, что когда автомобиль движется с ускорением, его ускорение имеет положительное значение; а когда автомобиль движется с замедлением, его ускорение имеет отрицательное значение.
S803: в соответствии со скоростью и ускорением автомобиля определяется наличие возможности уступить дорогу пешеходу.
В конкретном варианте реализации выполняющееся на основании скорости и ускорения автомобиля определение наличия возможности уступить дорогу пешеходу включает в себя определение того, является ли упомянутая скорость движения автомобиля меньше предварительно заданного значения скорости; если является, то далее в соответствии с ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления; если автомобиль находится в состоянии замедления, это определяется как наличие возможности уступить дорогу пешеходу.
Необходимо понимать, что при использовании водителем педали газа или педали тормоза автомобиль будет находиться соответственно в ускорении или замедлении. Если водителем задается относительно высокая скорость движения автомобиля, и при этом не выполняется каких-либо четких операций по снижению скорости, а ускорение автомобиля имеет положительное значение, это свидетельствует о том, что в данный момент водитель не намерен уступать дорогу пешеходу. Если водителем задается относительно низкая скорость движения автомобиля, например, ниже предварительно заданной скорости движения, и при этом ускорение автомобиля имеет отрицательное значение, то это свидетельствует о том, что водитель имеет намерение уступить дорогу пешеходу.
Необходимо пояснить, что предварительно задаваемая скорость движения автомобиля может быть предварительно настроена в значении около 20 км/ч, то есть если автомобиль движется с относительно высокой скоростью, которая превышает предварительно заданную скорость, даже если ускорение автомобиля имеет отрицательное значение, скорее всего, водитель не желает уступать дорогу пешеходу, а просто хочет пересечь участок на подходящей низкой скорости. Поэтому только в ситуации, когда автомобиль движется с относительно низкой скоростью, и при этом ускорение автомобиля имеет отрицательное значение, велика вероятность того, что водитель желает уступить дорогу пешеходу.
S804: если определена возможность уступить дорогу пешеходу, то в зоне расположения упомянутого пешехода создается проекция линии указателей, указывающая на приоритет движения пешехода.
Как правило, проекция линии указателей для пешехода будет отображаться только в том случае, если при приближении автомобиля к пешеходу водитель имеет намерение уступить ему дорогу. Поэтому в конкретном варианте реализации сначала может быть определено, находится ли промежуток между упомянутым пешеходом и автомобилем в зоне создания проекции; если находится, то в соответствии с изменением местоположения пешехода перед упомянутым пешеходом создается проекция линии указателей пересечения дороги, указывающая на приоритет движения пешехода. То есть: если промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции (например, 10 м), это означает, что автомобиль располагается относительно близко к пешеходу. Очевидно, что расстояние 10 м приведено включительно в качестве примера, и никаким образом не ограничивает область защиты данного изобретения.
Другими словами, если при наличии у автомобиля намерения уступить дорогу пешеходу промежуток между пешеходом и автомобилем располагается в зоне проекции, то перед пешеходом отобразится проекция линии указателей. Когда автомобиль замедляется и медленно двигается вперед, при перемещении автомобиля происходит соответствующая корректировка расположения линии указателей таким образом, чтобы она продолжала располагаться прямо перед пешеходом до тех пор, пока он не покинет зону проекции. До этого момента водитель не может самостоятельно начать ускорение автомобиля, за исключением ситуации, когда водитель вручную отключают данную функцию, в этом случае становится возможным выполнять ускорение замедление в нормальном режиме.
Кроме этого, проекция линии указателей должна отображаться в зоне расположения упомянутого пешехода в соответствии с настраиваемым пользователем режимом проекции; режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции. При этом, когда задействован активный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу; когда задействован пассивный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу, если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу и получения соответствующего отклика от водителя; когда задействован режим запрета проекции, отображение проекции запрещено.
На Фиг. 6 представлена логика управления для способа управления автомобилем, то есть когда режим проекции задан водителем в значении «активный», линия указателей для пешехода будет отображаться, когда функция включена, и соблюдены условия для запуска проекции. Когда режим проекции задан в значении «пассивный», то при движении автомобиля в таком режиме от момента начала движения до его остановки даже при включенной функции и выполнении условий для запуска проекция будет отображаться ограниченное количество раз. Например: количество циклов отображения проекции предварительно настроено в значении n. В этом случае после создания условий для запуска проекции проецирование будет воспроизведено первые n раз; когда количество циклов отображения проекции превысит n, произойдет выключение этой функции. Когда режим проекции задан в значении «по разрешению», то каждый раз при возникновении условий для запуска проекции посредством голосового помощника или отображения соответствующего предупреждения водителю будет представлен запрос на создание проекции; в этом случае проецирование выполняется в зависимости от ответа водителя. Когда режим проекции задан в значении «запрет», создание проекции не выполняется, и запросы не предоставляются.
В том числе, условия для запуска представляют собой следующее: скорость движения автомобиля ниже предварительно заданной скорости движения, при этом автомобиль находится в состоянии замедления; перед автомобилем обнаружен пешеход, при этом промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции; режим проекции не задан водителем в значении «запрет».
На Фиг. 2 представлен способ проецирования линии указателей, когда пешеход переходит дорогу с правой стороны. Например, когда видеокамера автомобиля не обнаруживает впереди какой-либо разметки или знаков, включая, но не ограничиваясь разметкой пешеходного перехода «зебра», дорожными знаками и линиями движения пешеходов, а режим проекции задан в значении «активный», то в соответствии со способом управления автомобилем реализуется следующая стратегия управления. Как показано на Фиг. 2, когда пешеход Р1 с правой стороны входит в поле зрения видеокамеры автомобиля 2, водитель, чтобы уступить дорогу пешеходу, снижает скорость и останавливает автомобиль, чтобы скорость движения автомобиля стала ниже предварительно заданной скорости движения, например предварительно заданная скорость движения составляет 20 км/ч; при этом, исходя из значения ускорения автомобиля, получены данные о том, что автомобиль находится в состоянии замедления; в этом случае пиксельные фары L1 и L2 проецируют перед пешеходом линию указателей 3 траектории пересечения дороги пешеходом, обозначая направление его движения. Как показано на Фиг. 2, линия указателей 3 указывает пешеходу Р1 направление движения влево, демонстрируя пешеходу, что в данный момент автомобиль уступает ему дорогу. Намерение водителя пропустить пешехода используется в качестве визуализированного взаимодействия человек-машина; в этот период, вплоть до момента, пока пешеход безопасно не пересечет участок дороги впереди автомобиля, водителю запрещено прибегать к ускорению автомобиля, возможность ускорения и замедления в нормальном режиме станет доступной только после того, как пешеход безопасно пересечет участок дороги впереди автомобиля, или водитель вручную выключит данную функцию. Однако, если водитель в этот момент не снизил скорость движения ниже предварительно заданной скорости движения, или если после того, как видеокамера обнаружила пешехода, водитель не предпринял каких-либо четких действий для замедления, это означает, что водитель не имеет намерения уступать дорогу пешеходу. Такое состояние автомобиля определяется как не соответствующее условиям запуска проекции, в результате чего автомобиль не создает проекцию.
Как показано на Фиг. 3 и Фиг. 4, способ управления автомобилем позволяет в соответствии с направлениями движения пешеходов с двух сторон дороги проецировать соответствующие направления линий указателей. В этом случае для пешехода с правой стороны проецируется линия указателей с направлением движения влево, а для пешехода с левой стороны проецируется линия указателей с направлением движения вправо. В будущем эта функция также может использоваться для визуализации взаимодействия человек-машина при беспилотном управлении автомобилем. Находящийся в режиме беспилотного управления автомобиль при обнаружении впереди переходящего дорогу пешехода должен замедлить движение, остановиться и создать проекцию линии указателей для пешехода, информируя пешехода о том, что в данный момент находящийся в режиме беспилотного управления автомобиль уступает ему дорогу и предлагает своевременно перейти участок дороги перед ним.
Одновременно с этим, в качестве способа проекции линии указателей может использоваться динамическая проекция. Как показано на Фиг. 5, линия указателей включает, но не ограничивается 8 блоками, которые поочередно гаснут в последовательности от 1 до 8, то есть одновременно с выключением проекции блока линии указателей №1 включается проекция блока линии указателей №2, далее по аналогии. Таким образом, блоки линии указателей поочередно загораются в направлении движения пешехода, предлагая ему начать движение вперед. Временной интервал последовательного включения блоков линии указателей составляет, но не ограничивается 0,5 секунды. В соответствии с представленной на Фиг. 5 нумерацией блоков линии указателей может использоваться следующая последовательность их включения: 2345678→1345678→1245678→1235678→1234678, то есть осуществляется контроль мигания проецируемой для пешехода линии указателей.
Способ управления автомобилем в соответствии с примером реализации данного изобретения позволяет посредством контроля скорости движения и ускорения автомобиля определять, имеет ли водитель намерение уступить дорогу пешеходу, и в случае если водитель имеет намерение уступить дорогу пешеходу, то отобразить для пешехода проекцию линии указателей, чтобы предоставить пешеходу право преимущественного пересечения дороги перед автомобилем, что повышает безопасность для автомобиля и пешехода.
Фиг. 7 представляет собой блок-схему структуры системы управления автомобилем по одному из примеров реализации данного изобретения. На Фиг. 7 представлена система управления автомобилем 700 по одному из примеров реализации данного изобретения, который включает в себя модуль контроля 710 и модуль проецирования 720.
В том числе, модуль контроля 710, который используется для контроля наличия пешеходов перед автомобилем; модуль проецирования 720, который после обнаружения модулем контроля 710 пешехода впереди автомобиля используется для того, чтобы в соответствии с состоянием автомобиля определять соответствие условиям создания проекции, и после определения того, что состояние автомобиля удовлетворяет условиям создания проекции, используется для создания в зоне расположения пешехода проекции линии указателей для пешехода, указывающей на приоритет движения пешехода.
Как показано на Фиг. 7, система управления автомобилем 700 также может включать в себя модуль управления 730, который используется для того, чтобы одновременно с созданием модулем проецирования 720 проекции линии указателей для пешехода в зоне расположения пешехода осуществлять для автомобиля контроль ограничения скорости, препятствующий ускорению автомобиля.
В одном из вариантов реализации данного изобретения модуль проецирования 720 используется для того, чтобы на основании скорости и ускорения автомобиля определять наличие возможности уступить дорогу пешеходу; если такая возможность имеется, то это определяется как соответствие условиям создания проекции.
В одном из вариантов реализации данного изобретения модуль проецирования 720 используется для определения того, является ли скорость движения автомобиля меньше предварительно заданного значения скорости; если является, то далее в соответствии с ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления; если автомобиль находится в состоянии замедления, то это определяется как наличие возможности уступить дорогу пешеходу.
В одном из вариантов реализации данного изобретения модуль управления 730 также используется для обнаружения пешехода в зоне обнаружения; обнаружение пешехода определяется как подтверждение того, что пешеход не пересек зону обнаружения, в этом случае посредством модуля проецирования 720 в зоне расположения пешехода продолжается проецирование линии указателей для пешехода, при этом для автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля; отсутствие пешехода в зоне обнаружения определяется как подтверждение того, что пешеход пересек зону обнаружения, в этом случае проецирование линии указателей в зоне расположения упомянутого пешехода посредством модуля проецирования 720 прекращается.
Система управления автомобилем в соответствии с вариантом реализации данного изобретения позволяет обнаруживать впереди автомобиля пешехода и, если обстановка соответствует условиям проецирования, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги. Одновременно с этим осуществляется контроль ограничения скорости движения автомобиля, эффективно предотвращая ошибки в действиях водителя, которые могут привести к ускорению автомобиля, что повышает безопасность для автомобиля и пешехода.
В одном из вариантов реализации данного изобретения система управления также включает в себя модуль определения намерений водителя (на Фиг. 7 не представлен), который после обнаружения модулем контроля пешехода впереди автомобиля используется для того, чтобы на основании скорости и ускорения автомобиля определять наличие возможности уступить дорогу пешеходу. Упомянутый модуль проецирования также используется для того, чтобы после определения модулем определения намерений водителя наличия возможности уступить дорогу пешеходу создавать в зоне расположения упомянутого пешехода проекцию линии указателей для пешехода, указывающую на приоритет движения пешехода.
В одном из вариантов реализации данного изобретения упомянутый модуль проецирования используется для того, чтобы в случае если промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции, в соответствии с изменением местоположения упомянутого пешехода создавать перед упомянутым пешеходом проекцию линии указателей пересечения дороги, указывающую на приоритет движения пешехода.
В одном из вариантов реализации данного изобретения упомянутый модуль проецирования также используется для того, чтобы в соответствии с настраиваемым пользователем режимом проекции в зоне расположения упомянутого пешехода создавать проекцию линии указателей для пешехода. Упомянутый режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции. В том числе, когда задействован активный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу; когда задействован пассивный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу, если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу и получения соответствующего отклика от водителя; когда задействован режим запрета проекции, отображение проекции запрещено.
Система управления автомобилем в соответствии с примером реализации данного изобретения позволяет посредством контроля скорости движения и ускорения автомобиля определять, имеет ли водитель намерение уступить дорогу пешеходу, и в случае если водитель имеет намерение уступить дорогу пешеходу, то отобразить для пешехода проекцию линии указателей, чтобы предоставить пешеходу право преимущественного пересечения дороги перед автомобилем, что повышает безопасность для автомобиля и пешехода.
Необходимо пояснить, что конкретный способ реализации системы управления автомобилем в примере реализации данного изобретения в целом аналогичен конкретному способу реализации способа управления автомобилем в примере реализации данного изобретения, его конкретное описание представлено в описании способа управления автомобилем и в целях уменьшения объема лишней информации здесь подробно не описывается.
Далее, вариант реализации данного изобретения представляет автомобиль, на котором установлена система управления автомобилем, упомянутая в любом из вышеизложенных вариантов реализации. Данный автомобиль способен обнаруживать впереди себя пешехода и, если обстановка соответствует условиям проецирования, отображать проекцию линии указателей для пешехода, чтобы предоставить пешеходу право преимущественного пересечения дороги. Одновременно с этим осуществляется контроль ограничения скорости движения автомобиля, эффективно предотвращая ошибки в действиях водителя, которые могут привести к ускорению автомобиля и столкновению с пешеходом, что повышает безопасность для автомобиля и пешехода.
Кроме этого, другие виды конструкции и функции автомобиля по примеру реализации данного изобретения уже известны рядовому техническому персоналу данной области и в целях уменьшения объема лишней информации здесь подробно не описываются.
Далее, варианты реализации по данной заявке представляют машиночитаемую среду, в которой хранится компьютерная программа. Упомянутая компьютерная программа при ее выполнении компьютерным процессором реализует упомянутый в любом из вышеописанных примеров реализации способ управления автомобилем.
Необходимо пояснить, что упомянутые процессы и способы, используемые для описания схем процессов и других способов по данному изобретению, можно понимать как то, что они представляют собой модули, фрагменты или части кода выполняемых команд, используемые для реализации специальных логических функций или последовательностей процессов. Технический персонал, имеющий отношение к примерам реализации данной заявки, должен понимать, что объем предпочтительных способов реализации данной заявки включает в себя и иные способы реализации, в том числе реализацию функций не в указанной или обсуждаемой последовательности, включая одновременное выполнение в прямой или обратной последовательности в соответствии со связанными функциями.
Представленные в схемах процессов или описанные другими способами логика и/или последовательности, в том числе перечни выполняемых в определенной последовательности команд, которые могут рассматриваться в качестве используемых для реализации логических функций, могут быть предметно реализованы в любой машиночитаемой среде с целью использования в системах исполнения команд, устройствах или на оборудовании (например, в системах на основе компьютера, включая процессорные системы или иные системы, способные получать команды от систем выполнения команд, устройств или оборудования, а также включая системы исполнения команд), или с целью использования в сочетании с системами исполнения команд, устройствами или оборудованием. Термин «машиночитаемая среда», используемый в данном описании, может представлять собой любую систему исполнения команд, устройство или оборудование, используемые, в том числе, для содержания, хранения, обеспечения связи, распространения или передачи программ, либо устройство, используемое в сочетании с этими системами исполнения команд, устройствами или оборудованием. Более конкретные примеры машиночитаемой среды (неокончательный перечень) включают в себя имеющие одно или несколько электрических линий электрические соединительные части (электронные устройства), портативные компьютерные носители (магнитные носители), запоминающее устройство с произвольным доступом (RAM), постоянное запоминающее устройство (ROM), электрически стираемое перепрограммируемое постоянное запоминающее устройство (EPROM или флеш-память), волоконно-оптические устройства и портативные компактные дисковые носители (CDROM). Кроме этого, машиночитаемая среда может представлять собой даже бумажный носитель с распечатанной на ней вышеуказанной программой или другую пригодную для использования среду, которую можно обработать, к примеру, с использованием оптического сканирования с последующем редактированием, расшифровкой или другими соответствующими способами, чтобы электронным методом получить вышеупомянутую программу с последующим ее сохранением на машинную память.
Рядовой технический персонал данной технической сферы должен понимать, что все или часть последовательностей, сопутствующих способам в вышеуказанных примерах реализации, могут быть реализованы с помощью соответствующих аппаратных средств, определяемых программой, которая может храниться в одном из видов машиночитаемой среды и исполнение которой включает в себя одну из последовательностей, описанных в вариантах реализации способа, или их сочетание.
Использованные в данном описании такие справочные термины, как «один вариант реализации», «несколько примеров реализации», «пример», «конкретный вариант» и «несколько примеров» подразумевают под собой сочетание этих вариантов реализации или приводимые в примерах конкретные характерные признаки, структуру, материал или особенности, содержащиеся в одном или нескольких вариантах реализации данной заявки. Смысл, передаваемый при использовании вышеперечисленных терминов в данном описании, не обязательно указывает на аналогичный вариант реализации или приводимый пример. При этом, содержащиеся в описании конкретные характерные признаки, структура, материал или особенности могут соответствующим способом сочетаться в одном или нескольких вариантах реализации или приводимых примерах. Кроме этого, при отсутствии взаимных противоречий технический персонал данной сферы может сочетать или объединять представленные в данном описании разные варианты реализации или приводимые примеры, равно как и их характерные признаки.
Представленные и описанные выше варианты реализации данной заявки должны быть интерпретированы как показательные примеры ее использования и не могут быть интерпретированы в качестве какого-либо ограничения для данной заявки, при этом рядовой технический персонал данной сферы может в пределах объема данной заявки вносить изменения, поправки, замены или модификации в упомянутые варианты реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подачи предупреждающих сигналов автомобиля, система и автомобиль | 2019 |
|
RU2772159C1 |
| СПОСОБ И СИСТЕМА ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ГРУЗОВОГО АВТОМОБИЛЯ | 2018 |
|
RU2724935C1 |
| Способ и устройство управления автомобилем | 2018 |
|
RU2742445C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| Система организации нерегулируемого пешеходного перехода | 2019 |
|
RU2709296C1 |
| УСТРОЙСТВО ВЫДАЧИ УВЕДОМЛЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2702281C1 |
| СПОСОБ ИНДИКАЦИИ ИНФОРМАЦИИ В АВТОМОБИЛЕ И ИНДИКАТОРНОЕ УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ | 2008 |
|
RU2475373C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО ЗАЩИТЫ АВТОМОБИЛЯ ПРИ СТОЛКНОВЕНИИ (ВАРИАНТЫ) | 2014 |
|
RU2600174C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
Изобретение относится к способу и системе управления автомобилем. Способ управления автомобилем включает в себя контроль наличия пешеходов перед автомобилем, определение соответствия состояния автомобиля условиям создания проекции в случае обнаружения пешехода, а в случае определения возможности уступить дорогу пешеходу - создание в зоне расположения упомянутого пешехода проекции линии указателей, указывающей на приоритет движения пешехода. Система управления автомобилем включает в себя модуль контроля, который используется для контроля наличия пешеходов перед автомобилем и модуль проецирования, который после обнаружения модулем контроля пешехода впереди автомобиля используется для того, чтобы в соответствии с состоянием автомобиля определять соответствие условиям создания проекции, и после определения того, что состояние автомобиля удовлетворяет упомянутым условиям создания проекции, используется для создания в зоне расположения упомянутого пешехода проекции линии указателей для пешехода, указывающей на приоритет движения пешехода. Достигается повышение безопасности управления транспортным средством. 3 н. и 16 з.п. ф-лы, 8 ил.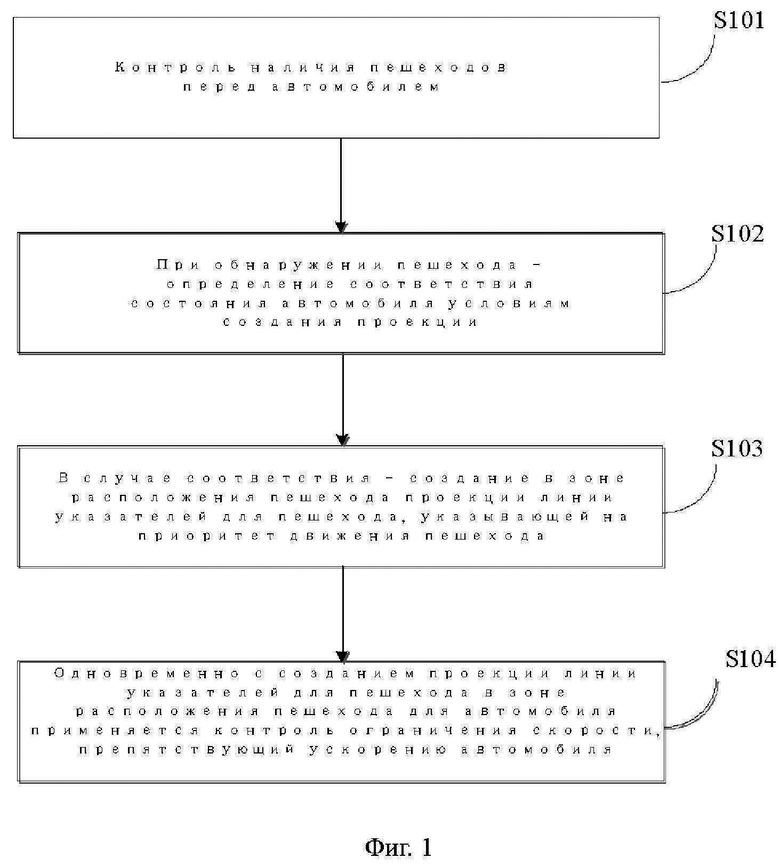
1. Способ управления автомобилем, характеризующийся тем, что включает в себя следующую последовательность:
контроль наличия пешеходов перед автомобилем;
определение соответствия состояния автомобиля условиям создания проекции в случае обнаружения пешехода;
в случае определения возможности уступить дорогу пешеходу - создание в зоне расположения упомянутого пешехода проекции линии указателей, указывающей на приоритет движения пешехода.
2. Способ управления автомобилем в соответствии с п. 1, характеризующийся тем, что также включает в себя следующее:
одновременно с созданием проекции линии указателей для пешехода в зоне расположения упомянутого пешехода для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля.
3. Способ управления автомобилем в соответствии с п. 1, характеризующийся тем, что упомянутое определение соответствия состояния автомобиля условиям создания проекции включает в себя следующее:
определение наличия возможности уступить дорогу пешеходу в соответствии со скоростью и ускорением автомобиля;
при наличии такой возможности - определение соответствия вышеупомянутым условиям создания проекции.
4. Способ управления автомобилем в соответствии с п. 3, характеризующийся тем, что упомянутое выполняющееся на основании скорости и ускорения автомобиля определение наличия возможности уступить дорогу пешеходу включает в себя следующее:
определение того, является ли упомянутая скорость движения автомобиля меньше предварительно заданного значения скорости;
если является, то далее в соответствии с упомянутым ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления;
если автомобиль находится в состоянии замедления, то это определяется как наличие возможности уступить дорогу пешеходу.
5. Способ управления автомобилем в соответствии с п. 1, характеризующийся тем, что также включает в себя следующее:
получение настраиваемого пользователем режима проекции, в том числе упомянутый режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции;
при этом, когда задействован активный режим проекции, пассивный режим проекции или режим проекции по разрешению, то в зоне расположения упомянутого пешехода с применением соответствующего способа проекции создается проекция линии указателей для пешехода; когда задействован режим запрета проекции, то в зоне расположения упомянутого пешехода проекция линии указателей не создается.
6. Способ управления автомобилем в соответствии с пп. 1-5, характеризующийся тем, что также включает в себя следующее:
контроль наличия упомянутого пешехода в зоне обнаружения;
в случае обнаружения пешехода - определение того, что упомянутый пешеход не пересек зону обнаружения, в этом случае в зоне расположения упомянутого пешехода продолжается проецирование линии указателей для пешехода, при этом для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля;
отсутствие упомянутого пешехода в упомянутой зоне обнаружения определяется как подтверждение того, что упомянутый пешеход пересек зону обнаружения, в этом случае проецирование линии указателей в зоне расположения упомянутого пешехода прекращается.
7. Способ управления автомобилем в соответствии с п. 5, характеризующийся тем, что действия после выполнения контроля наличия пешеходов перед автомобилем также включают в себя следующее:
при обнаружении пешехода далее выполняется определение скорости движения и ускорения автомобиля;
в соответствии со скоростью и ускорением упомянутого автомобиля определяется наличие возможности уступить дорогу пешеходу;
если определена возможность уступить дорогу пешеходу, то в зоне расположения упомянутого пешехода создается проекция линии указателей, указывающая на приоритет движения пешехода.
8. Способ управления автомобилем в соответствии с п. 7, характеризующийся тем, что создание в зоне расположения упомянутого пешехода проекции линии указателей для пешехода, указывающей на приоритет движения пешехода, включает в себя следующее:
определение того, находится ли промежуток между упомянутым пешеходом и автомобилем в зоне создания проекции;
если находится, то в соответствии с изменением местоположения упомянутого пешехода перед упомянутым пешеходом создается проекция линии указателей пересечения дороги, указывающая на приоритет движения пешехода.
9. Способ управления автомобилем в соответствии с п. 7, характеризующийся тем, что действия после получения настраиваемого пользователем режима проекции, который в том числе включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции, также включают в себя следующее:
в соответствии с настраиваемым пользователем режимом проекции в зоне расположения упомянутого пешехода создается проекция линии указателей для пешехода;
при этом, когда задействован активный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу; когда задействован пассивный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу, если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу и получения соответствующего отклика от водителя; когда задействован режим запрета проекции, отображение проекции запрещено.
10. Способ управления автомобилем в соответствии с пп. 7-9, характеризующийся тем, что упомянутое создание в зоне расположения пешехода проекции линии указателей для пешехода включает в себя управление миганием упомянутой проекции линии указателей для пешехода.
11. Система управления автомобилем, характеризующаяся тем, что включает в себя:
модуль контроля, который используется для контроля наличия пешеходов перед автомобилем;
модуль проецирования, который после обнаружения модулем контроля пешехода впереди автомобиля используется для того, чтобы в соответствии с состоянием автомобиля определять соответствие условиям создания проекции, и после определения того, что состояние автомобиля удовлетворяет упомянутым условиям создания проекции, используется для создания в зоне расположения упомянутого пешехода проекции линии указателей для пешехода, указывающей на приоритет движения пешехода.
12. Система управления автомобилем в соответствии с п. 11, характеризующаяся тем, что также включает в себя следующее:
модуль управления, который используется для того, чтобы одновременно с созданием упомянутым модулем проецирования проекции линии указателей для пешехода в зоне расположения упомянутого пешехода осуществлять для упомянутого автомобиля контроль ограничения скорости, препятствующий ускорению автомобиля.
13. Система управления автомобилем в соответствии с п. 11, характеризующаяся тем, что упомянутый модуль проецирования используется для следующего:
определение наличия возможности уступить дорогу пешеходу в соответствии со скоростью и ускорением автомобиля;
при наличии такой возможности это определяется как соответствие вышеупомянутым условиям создания проекции.
14. Система управления автомобилем в соответствии с п. 12, характеризующаяся тем, что упомянутый модуль проецирования используется для следующего:
определения того, является ли упомянутая скорость движения автомобиля меньше предварительно заданного значения скорости;
если является, то далее в соответствии с упомянутым ускорением автомобиля выполняется определение того, находится ли автомобиль в состоянии замедления;
если автомобиль находится в состоянии замедления, то это определяется как наличие возможности уступить дорогу пешеходу.
15. Система управления автомобилем в соответствии с пп. 11-14, характеризующаяся тем, что упомянутый модуль управления также используется для обнаружения упомянутого пешехода в зоне обнаружения; обнаружение пешехода определяется как подтверждение того, что упомянутый пешеход не пересек зону обнаружения, в этом случае посредством упомянутого модуля проецирования в зоне расположения упомянутого пешехода продолжается проецирование линии указателей для пешехода, при этом для упомянутого автомобиля применяется контроль ограничения скорости, препятствующий ускорению автомобиля; отсутствие упомянутого пешехода в упомянутой зоне обнаружения определяется как подтверждение того, что упомянутый пешеход пересек зону обнаружения, в этом случае проецирование линии указателей в зоне расположения упомянутого пешехода посредством упомянутого модуля проецирования прекращается.
16. Система управления автомобилем в соответствии с п. 11, характеризующаяся тем, что также включает в себя следующее:
модуль определения намерений водителя, который после обнаружения модулем контроля пешехода впереди автомобиля используется для того, чтобы на основании скорости и ускорения автомобиля определять наличие возможности уступить дорогу пешеходу,
упомянутый модуль проецирования также используется для того, чтобы после определения модулем определения намерений водителя наличия возможности уступить дорогу пешеходу создавать в зоне расположения упомянутого пешехода проекцию линии указателей для пешехода, указывающую на приоритет движения пешехода.
17. Система управления автомобилем в соответствии с п. 16, характеризующаяся тем, что упомянутый модуль проецирования используется для того, чтобы в случае если промежуток между упомянутым пешеходом и автомобилем находится в зоне создания проекции, в соответствии с изменением местоположения упомянутого пешехода создавать перед упомянутым пешеходом проекцию линии указателей пересечения дороги, указывающую на приоритет движения пешехода.
18. Система управления автомобилем в соответствии с п. 16, характеризующаяся тем, что упомянутый модуль проецирования также используется для того, чтобы в соответствии с настраиваемым пользователем режимом проекции в зоне расположения упомянутого пешехода создавать проекцию линии указателей для пешехода; упомянутый режим проекции включает в себя активный режим проекции, пассивный режим проекции, режим проекции по разрешению и режим запрета проекции; в том числе, когда задействован активный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу; когда задействован пассивный режим проекции, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу, если при этом количество проекций меньше предварительно заданного количества; когда задействован режим проекции по разрешению, отображение проекции выполняется после определения наличия возможности уступить дорогу пешеходу и получения соответствующего отклика от водителя; когда задействован режим запрета проекции, отображение проекции запрещено.
19. Автомобиль, характеризующийся тем, что на нем установлена упомянутая система управления автомобилем в соответствии с пп. 11-18.
| CN 108162957 A, 15.06.2018 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2659670C1 |

