Притязание по данной заявке было передано в Патентное бюро КНР 27 декабря 2017 года, номер заявки 201711448130.1, заявлено право приоритета на патент КНР на изобретение под названием «Способ и устройство управления автомобилем», его содержание в полном объеме в виде ссылки включено в данную заявку.
Область применения технологии
Данное изобретение относится к автомобильной сфере и включает в себя способ и устройство управления автомобилем.
Предыдущий уровень техники
Чтобы повысить проходимость и управляемость в условиях пересеченной местности, многие модели автомобилей при выпуске с завода оснащены режимами управления в условиях бездорожья, в том числе для движения по снегу, пескам, грязи, скалам и т.д., в этом случае улучшение характеристик управления автомобилем в упомянутых условиях бездорожья достигается за счет управления тяговой системой автомобиля, системой полного привода и системой стабилизации кузова.
В существующем уровне техники все режимы управления по пересеченной местности, которыми оснащен автомобиль, подразумевают под собой запуск водителем, оказавшемся в условиях бездорожья, соответствующей функции, после запуска которой главный контроллер выполняет переключение всех систем автомобиля в нужный режим, и в результате применения комбинации предварительно подобранных эксплуатационных параметров улучшаются характеристики проходимости автомобиля, это помогает опытному водителю при разумном использовании педали газа, педали тормоза и руля, в ходе управления автомобилем более легко преодолевать сложный участок пересеченной местности. См. Таблицу 1 ниже.
Тем не менее, необходимо учитывать, что автомобиль в процессе движения по дорогам с плохим покрытием (снег, грязь, пески, горный серпантин) вынужден непрерывно преодолевать подъемы и спуски, в этом случае нехватка водительского опыта или недостаточное знание местности могут привести к возникновению неточностей в управлении автомобилем. Если существуют отклонения в своевременности применения водителем отбора мощности и запросов на торможение, то даже при выборе соответствующего режима езды по бездорожью это зачастую приводит к возникновению пробуксовок, соскальзыванию со склона, застреванию автомобиля и невозможности благополучного преодоления подъема, неровного участка дороги или спуска. Поэтому в существующих системах управления ездой по бездорожью для устойчивого управления автомобилем на спусках применяется модуль контроля спуска со склона (HDC), но при этом сохраняются недостатки эффективности управления при преодолении подъемов. Модуль автоматической парковки (AVH) и модуль помощи при трогании с места на подъеме (HHC) лишь помогают водителю плавно тронуться с места при начале движения на подъеме, но отключаются после того, как автомобиль начал движение, и не способны реализовать точное управление в процессе преодоления подъема. Кроме этого, при движении по ровному участку дороги отсутствует возможность автоматического адаптивного управления автомобилем в соответствии с текущими условиями бездорожья. Несмотря на то, что модуль круиз-контроля/адаптивного круиз-контроля (CC/ACC) реализует автоматическое управление скоростью автомобиля, тем не менее, использование функции круиз-контроля, которая опирается лишь на заданное водителем значение скорости, при движении по пересеченной местности может нести в себе определенные риски и привести к травмам и повреждению автомобиля.
Суть изобретения
Принимая это во внимание, становится очевидным, что в предшествующем уровне техники существуют проблемы, связанные с тем, что при движении по пересеченной местности использование функции круиз-контроля, которая опирается лишь на заданное водителем значение скорости, при невозможности точного управления автомобилем в устойчивом состоянии может привести к получению травм человеком и повреждению автомобиля.
Чтобы устранить упомянутые проблемы, в примере реализации данного изобретения представлено техническое решение, которое реализуется следующим образом:
Способ управления автомобилем, при котором упомянутый автомобиль включает в себя модуль определения угла наклона, модуль общего контроля, модуль помощи при трогании с места на подъеме и модуль контроля спуска со склона; упомянутый способ может включать в себя следующее: при движении автомобиля с включенной функцией управления по бездорожью определяется включенное состояние функции круиз-контроля по бездорожью; при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определяется состояние наклона движения автомобиля. Если обнаружено, что автомобиль находится в состоянии спуска по склону, то упомянутый модуль общего контроля с помощью упомянутого модуля контроля спуска со склона осуществляет управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины. Если обнаружено, что автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля осуществляет контроль состояния движения автомобиля с помощью упомянутого модуля помощи при трогании с места на подъеме. Если обнаружено, что автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
Далее, упомянутый способ также может включать в себя следующее: если обнаружено, что упомянутая функция круиз-контроля по бездорожью находится в выключенном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
Далее, процесс управления скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины с помощью модуля общего контроля посредством модуля контроля спуска со склона может включать в себя: если упомянутый автомобиль находится в состоянии движения вниз по склону, то упомянутый модуль общего контроля получает текущую скорость движения упомянутого автомобиля; если упомянутая скорость движения превышает первую предварительно заданную пороговую величину, то происходит запуск упомянутого модуля контроля спуска со склона и вызов электронной системы стабилизации ESP, которая выполняет торможение упомянутого автомобиля, снижая текущую скорость движения до значения меньше упомянутой первой предварительно заданной пороговой величины.
Далее, процесс управления состоянием движения автомобиля посредством модуля общего контроля с помощью упомянутого модуля помощи при трогании с места на подъеме может включать в себя следующее: если упомянутый автомобиль находится в состоянии подъема по склону, то посредством определения информации о движении упомянутого автомобиля происходит получение данных о состоянии его движения и допустимом значении крутящего момента двигателя; упомянутая информация о движении автомобиля может, как минимум, включать в себя один или несколько из перечисленных пунктов: сигнал о степени нажатия педали газа, сигнал о неисправности двигателя, сигнал чистого крутящего момента, сигнал оборотов двигателя и сигнал положения передачи. Упомянутый модуль общего контроля в соответствии с состоянием движения упомянутого автомобиля и допустимым значением крутящего момента двигателя посредством управления тягой двигателя контролирует состояние движения автомобиля.
Далее, если упомянутый автомобиль движется не в наклонном состоянии, то процесс управления состоянием движения автомобиля в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье может включать в себя следующее: если упомянутый автомобиль движется не в наклонном состоянии, то в соответствии с режимом, задействованным функцией управления по бездорожью, осуществляется получение предварительно заданных параметров системы управления двигателем, системы управления КПП, системы полного привода, подвески, электронной системы стабилизации и системы взаимодействия человек-машина. В соответствии с предварительно заданными параметрами систем упомянутого автомобиля осуществляется контроль состояния движения автомобиля.
В отличие от предыдущего уровня техники упомянутый способ управления автомобилем по данному изобретению имеет как минимум следующие преимущества: опираясь на то, что существующая на сегодняшний день система управления в режиме движения по бездорожью находится во включенном состоянии, с помощью модуля определения угла наклона определяется состояние наклона движения упомянутого автомобиля. Если обнаружено, что автомобиль находится в состоянии движения вниз по склону, то упомянутый модуль общего контроля с помощью упомянутого модуля контроля спуска со склона HDC осуществляет управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины. Если обнаружено, что автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля осуществляет контроль состояния движения автомобиля с помощью упомянутого модуля помощи при трогании с места на подъеме HHC; он объединяет в себе существующие на сегодняшний день функции HDC и HHC, ориентированные на контроль автомобиля при спуске; вновь разработанную стратегию непрерывного контроля при преодолении подъемов, ориентированную на повышение безопасности при подъемах; вновь разработанную функцию круиз-контроля скорости на обычном бездорожье, ориентированную на контроль скорости движения автомобиля и поддержание стабильного вывода мощности; а также имеет такие полезные эффекты как предотвращение потери управления автомобилем вследствие его чрезмерного ускорения при движении под уклон, обеспечение движения автомобиля с определенной скоростью при движении вверх по склону с целью предотвращения пробуксовки или соскальзывания со склона в результате недостатка или излишка вывода мощности водителем в процессе преодоления подъема.
Устройство управления автомобилем, представленное для реализации другой цели данного изобретения, при этом упомянутый автомобиль включает в себя модуль определения угла наклона, модуль общего контроля, модуль помощи при трогании с места на подъеме и модуль контроля спуска со склона. Упомянутое устройство может включать в себя следующее: контрольный модуль, который при движении автомобиля с включенной функцией управления по бездорожью определяет включенное состояние функции круиз-контроля по бездорожью; модуль обнаружения наклона, который при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определяет состояние наклона движения автомобиля; модуль управления спуском по склону, который используется для того, что если обнаружено, что автомобиль находится в состоянии движения вниз по склону, то упомянутый модуль общего контроля с помощью упомянутого модуля управления спуском по склону осуществляет управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины; модуль управления подъемом по склону, который используется для того, что если обнаружено, что автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля осуществляет контроль состояния движения автомобиля с помощью упомянутого модуля помощи при трогании с места на подъеме; модуль управления при движении без уклона, который используется для того, что если обнаружено, что автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
Далее, упомянутое устройство также может включать в себя следующее: модуль управления движением по бездорожью, который используется для того, что если обнаружено, что упомянутая функция круиз-контроля по бездорожью находится в выключенном состоянии, то контроль за состоянием движения автомобиля осуществляется в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
Далее, упомянутый модуль управления при спуске может включать в себя следующее: субмодуль получения данных о скорости, который используется для того, что если упомянутый автомобиль находится в состоянии движения вниз по склону, то упомянутый модуль общего контроля получает текущую скорость движения упомянутого автомобиля; субмодуль управления скоростью, который используется для того, что если упомянутая скорость движения превышает первую предварительно заданную пороговую величину, то происходит запуск упомянутого модуля контроля спуска по склону и вызов электронной системы стабилизации ESP, которая выполняет торможение упомянутого автомобиля, снижая текущую скорость движения до значения меньше упомянутой первой предварительно заданной пороговой величины.
Далее, упомянутый модуль управления при подъеме может включать в себя следующее: субмодуль получения данных о состоянии движения, который используется для того, что если упомянутый автомобиль находится в состоянии подъема по склону, то посредством определения информации о движении упомянутого автомобиля происходит получение данных о состоянии его движения и допустимом значении крутящего момента двигателя; упомянутая информация о движении автомобиля может как минимум включать в себя один или несколько из перечисленных пунктов: сигнал о степени нажатия педали газа, сигнал о неисправности двигателя, сигнал чистого крутящего момента, сигнал оборотов двигателя и сигнал положения передачи; субмодуль управления, который используется для того, чтобы упомянутый модуль общего контроля в соответствии с состоянием движения упомянутого автомобиля и допустимым значением крутящего момента двигателя посредством управления тягой двигателя контролировал состояние движения автомобиля.
Далее, упомянутый модуль управления при движении без уклона может включать в себя следующее: субмодуль получения параметров движения, который используется для того, что если упомянутый автомобиль движется не в наклонном состоянии, то в соответствии с режимом, задействованным функцией управления по бездорожью, осуществляется получение предварительно заданных параметров системы управления двигателем, системы управления КПП, системы полного привода, подвески, электронной системы стабилизации и системы взаимодействия человек-машина; субмодуль управления автомобилем, который используется для того, чтобы в соответствии с предварительно заданными параметрами систем упомянутого автомобиля осуществлялся контроль состояния движения автомобиля.
Преимущества, которые имеет упомянутое устройство управления автомобилем в сравнении с предшествующим уровнем техники, аналогичны преимуществам вышеуказанного способа управления автомобилем и здесь подробно не описываются.
Вышеприведенное описание является лишь общим изложением технического решения по данному изобретению. Для более четкого понимания технических средств данного изобретения, а также с целью представления возможности осуществления содержания описания и облегчения понимания вышеуказанных и иных целей, особенностей и преимуществ данного данного изобретения ниже представлены конкретные примеры реализации данного изобретения.
Описание изображений
Являющиеся составной частью данного изобретения прилагаемые изображения используются для цели дополнительного разъяснения содержания данного изобретения, содержащиеся в данном изобретении наглядные примеры реализации и пояснения к ним предназначены для разъяснения содержания данного изобретения и не создают для него каких-либо неправомерных ограничений. Прилагаемые изображения включают в себя:
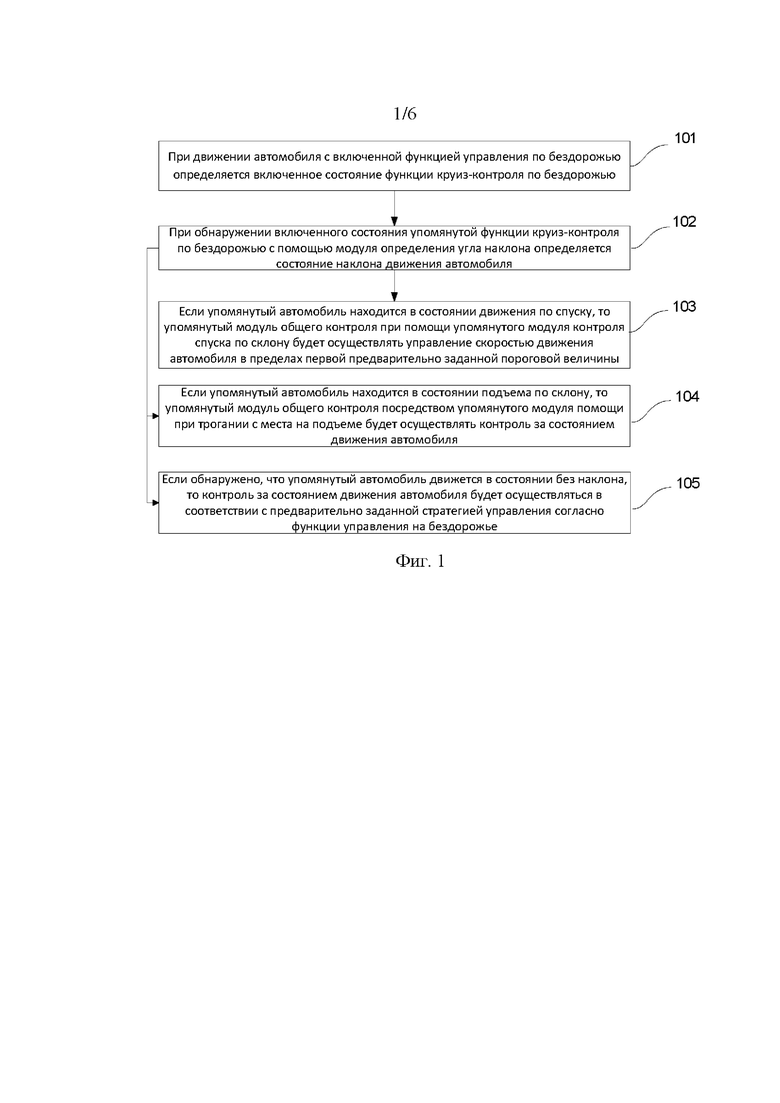
На Фиг. 1 представлена схема последовательности операций упомянутого способа управления автомобилем по примеру реализации 1 данного изобретения;
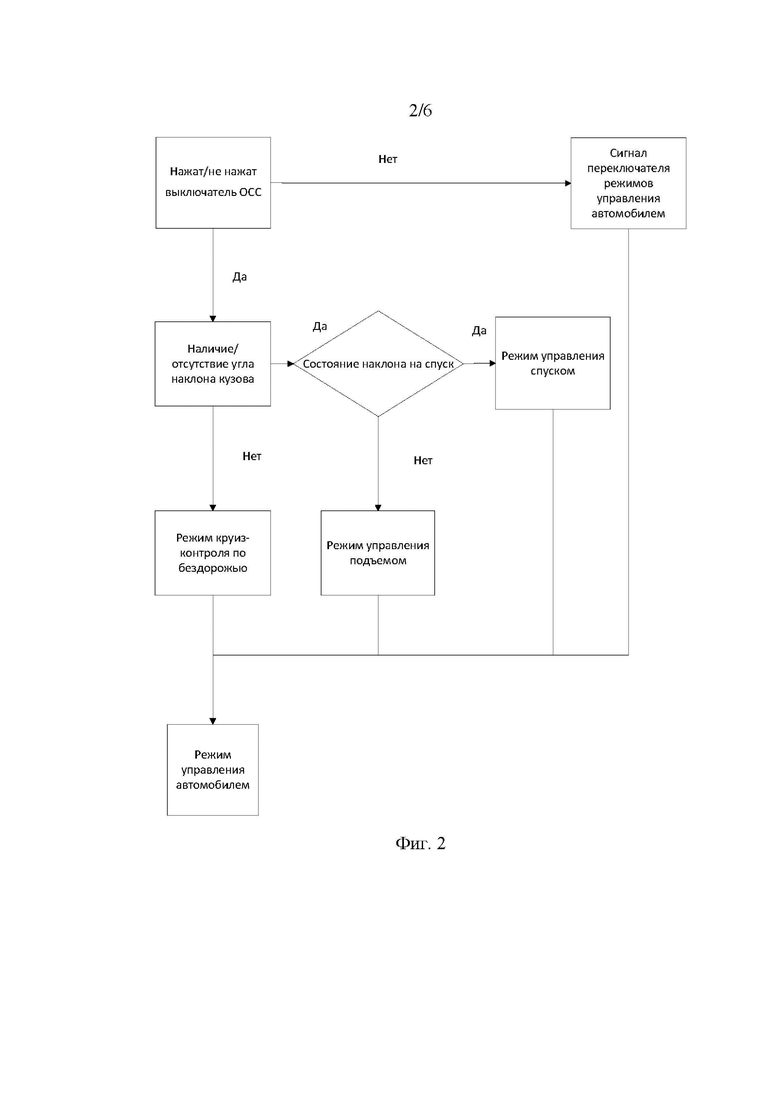
На Фиг. 2 представлена схема процесса определения включенного состояния ОСС в модуле общего контроля по примеру реализации 1 данного изобретения;
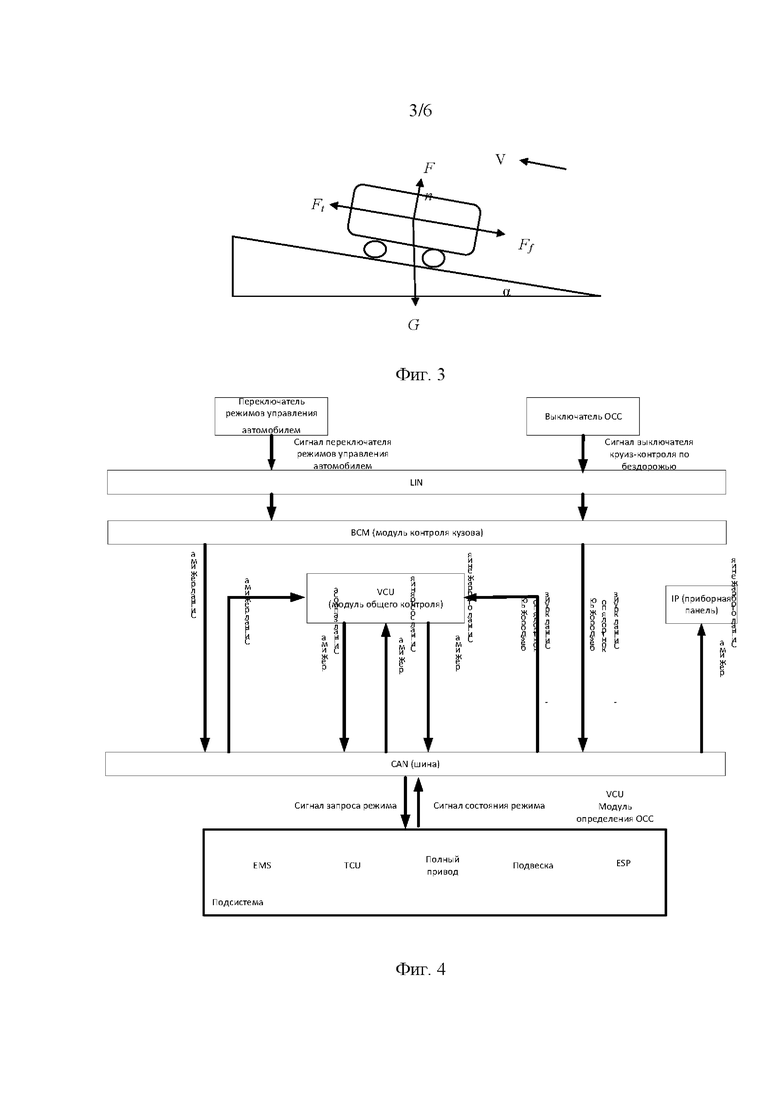
На Фиг. 3 представлена схема воздействия сил на автомобиль в примере реализации 1 данного изобретения;
На Фиг. 4 представлена блок-схема общего управления автомобилем по примеру реализации 1 данного изобретения;
На Фиг. 5 представлена схема последовательности операций упомянутого способа управления автомобилем по примеру реализации 2 данного изобретения;
На Фиг. 6 представлена структурированная блок-схема устройства управления автомобилем по примеру реализации 3 данного изобретения;
На Фиг. 7 представлена структурированная блок-схема устройства управления автомобилем по примеру реализации 3 данного изобретения;
На Фиг. 8 схематично представлена схема электронного устройства, используемого в соответствии со способом по данному изобретению; и
На Фиг. 9 схематично представлен модуль хранения программного кода, используемый для хранения или ношения с собой в соответствии со способом по данному изобретению.
Примеры реализации
Ниже согласно прилагаемым изображениям представлено более подробное описание показательных примеров реализации данного изобретения. Хотя показательные примеры реализации данного изобретения показаны на изображениях, следует понимать, что данное изобретение может быть реализовано в различных формах и не ограничивается изложенными здесь примерами реализации. Наоборот, данные примеры реализации представлены для более полного понимания и обеспечения возможности в полной мере передать техническому персоналу данной сферы сферу данного изобретения.
Необходимо пояснить, что при отсутствии разногласий приведенные в данном изобретении примеры реализации и приведенные в примерах реализации признаки могут взаимно сочетаться.
Толкование терминов:
EMS: Engine Management System, система управления двигателем
TCU: Transmission Control Unit, система управления КПП
ESP: Electronic Stability Program, система электронной стабилизации
TCS: Traction Control System, система управления тягой (функция в составе ESP)
OCC: Off-road Cruise Control, система круиз-контроля на бездорожье
HDC: Hill Descent Control, контроль спуска со склона
AVH: Automatic Vehicle Hold, функция автоматического управления автомобилем
HHC: Hill Hold Control, функция помощи при трогании с места на подъеме
CC/ACC: Cruise Control/ adaptive cruise control, круиз-контроль/ адаптивный круиз-контроль
VCU: Vehicle Control Unit, блок общего управления
ABM: Airbag Module, блок управления подушками безопасности
HMI: Human Machine Interface, система взаимодействия человек-машина
Режим управления в условиях бездорожья: чтобы повысить проходимость и управляемость в условиях пересеченной местности, многими производителями агрегатов разработан режим управления в условиях бездорожья, который за счет оптимизации характеристик тяговой системы автомобиля, системы полного привода и системы стабилизации кузова помогает водителю управлять автомобилем в условиях внешней среды и выходить из сложных ситуаций. На сегодняшний день типовые режимы управления в условиях бездорожья включают в себя режим управления на снегу, песке, грязи и скалах; в указанных режимах работу тяговой системы автомобиля, а также системы привода и системы стабилизации кузова можно описать так: управление каждым режимом осуществляется отдельно с помощью одного поворотного выключателя или нескольких кнопок. Когда водитель при проезде участка бездорожья задействует соответствующий режим управления в условиях бездорожья, главный контроллер выполняет переключение всех систем в нужный режим, и в результате применения комбинации предварительно подобранных эксплуатационных параметров улучшаются характеристики проходимости автомобиля, это помогает опытному водителю при разумном использовании педали газа, педали тормоза и руля в ходе управления автомобилем более легко преодолевать сложный участок пересеченной местности, см. таблицу ниже:
Более активный отклик на коэффициент скольжения
Таблица 1
Далее со ссылкой на изображения и примеры реализации представлено подробное описание данного изобретения.
Пример реализации 1
На Фиг. 1 представлена схема последовательности операций упомянутого способа управления автомобилем по примеру реализации данного изобретения, в том числе упомянутый автомобиль включает в себя модуль определения угла наклона, модуль общего контроля, модуль помощи при трогании с места на подъеме и модуль контроля спуска по склону; а способ может включать в себя следующую последовательность:
Шаг 101, при движении автомобиля с включенной функцией управления по бездорожью определение включенного состояния функции круиз-контроля по бездорожью.
В данном примере реализации изобретения функция круиз-контроля по бездорожью (off-road cruise control, OCC) разработана на базе существующей на сегодняшний день функции управления в режиме бездорожья, она объединяет в себе существующие функции HDC и HHC, чтобы контролировать движение автомобиля вниз по склону; при трогании автомобиля с места модуль общего контроля посредством обнаружения сигнала запуска функции круиз контроля по бездорожью определяет, задействована ли данная функция. В том числе, когда водитель задействует переключатель режимов управления автомобилем, модуль переключателя подает сигнал переключения режима управления автомобилем (Driving Mode), который проходит по локальной соединительной сетевой шине (Local Interconnect Network, LIN) и попадает в модуль контроля кузова (body control module, BCM); далее модуль контроля кузова преобразует сигнал переключения режимов управления автомобиля (Driving Mode) в сигнал режима (DrvMod) и передает его в шину CAN (Controller Area Network); в завершении сигнал режима (DrvMod) по шине CAN передается в модуль общего контроля. Модуль общего контроля посылает в соответствующие подсистемы сигнал запроса режима (VCU_DrvMod), подсистемы в соответствии с правильным ответом сигнала запроса режима от блока общего управления посылают ответные сигналы о своем состоянии на модуль общего контроля, после чего главный модуль управления отправляет сигнал отображения режима на панель приборов (Instrument Panel, IP). Например, как показано на Фиг.2, автомобиль движется в одном из режимов управления; когда происходит нажатие на выключатель OCC, сигнал переключения круиз-контроля по бездорожью (OffRoad_CC) по шине LIN передается в модуль контроля кузова ВСМ; модуль контроля кузова ВСМ конвертирует сигнал переключения круиз-контроля по бездорожью (OffRoad_CC) в сигнал круиз-контроля по бездорожью (OffRoad_CC_Req) и передает его в шину CAN; модуль общего контроля принимает этот сигнал и определяет запрос водителя на включение функции круиз-контроля по бездорожью.
При практическом применении команда включения функции круиз-контроля по бездорожью может генерироваться переключателем запуска функции круиз-контроля по бездорожью или предварительно заданным выключателем функции круиз-контроля по бездорожью; такой выключатель может представлять собой физическую кнопку, расположенную на панели управления автомобилем, или кнопку сенсорного управления, расположенную на сенсорном экране бортового компьютера автомобиля; данный пример реализации изобретения не накладывает в отношении этого каких-либо ограничений.
Шаг 102, при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определяется состояние наклона движения автомобиля.
В данном примере реализации изобретения при обнаружении включенного состояния функции круиз-контроля по бездорожью, то есть при обнаружении нажатого состояния выключателя ОСС, если OffRoad_CC_Req=active, то модуль общего контроля с помощью модуля определения угла наклона получает текущий угол наклона автомобиля и согласно этому углу наклона определяет текущий наклон дороги для автомобиля. Следует учитывать, что при движении по дорожному покрытию автомобиль преодолевает сопротивление качению  и сопротивление воздуха
и сопротивление воздуха  , создаваемое воздушной средой; когда автомобиль преодолевает подъем по наклонной дороге, ему приходится дополнительно преодолевать сопротивление подъему
, создаваемое воздушной средой; когда автомобиль преодолевает подъем по наклонной дороге, ему приходится дополнительно преодолевать сопротивление подъему  ; а когда автомобиль движется с ускорением, ему приходится дополнительно преодолевать сопротивление ускорению
; а когда автомобиль движется с ускорением, ему приходится дополнительно преодолевать сопротивление ускорению  , как показано на Фиг. 3.
, как показано на Фиг. 3.
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
где:
- сопротивление воздуха, рассчитывается с применением коэффициента сопротивления воздуха Cd, площади сопротивления автомобиля ветру А, плотности воздушной среды  и относительной скорости
и относительной скорости  . Данная величина сопротивления в реальных условиях разработки рассчитывается с применением формулы, в данном проекте для удобства выражения формул в последующих расчетах данная величина сопротивления не выражается.
. Данная величина сопротивления в реальных условиях разработки рассчитывается с применением формулы, в данном проекте для удобства выражения формул в последующих расчетах данная величина сопротивления не выражается.
- сопротивление подъему; составляющая силы тяжести автомобиля вдоль уклона выражается как сопротивление подъему автомобиля; G - сила тяжести, действующая на автомобиль;  , m - вес автомобиля, g - ускорение силы тяжести, α - угол наклона.
, m - вес автомобиля, g - ускорение силы тяжести, α - угол наклона.
- сопротивление ускорению; при движении автомобиля с ускорением ему приходится преодолевать силу инерции своего веса, возникающую при движении с ускорением. Целью данного изобретения является управление движением автомобиля в подъем с равномерной скоростью (или с малым ускорением), поэтому модуль определения угла наклона не выполняет расчета сопротивления ускорению, данная величина сопротивления учитывается в модуле круиз-контроля по бездорожью.
- сопротивление качению; гравитационная составляющая сила тяжести автомобиля, действующая перпендикулярно наклонной дороге, выражается как  ;
;  - коэффициент трения о поверхность дороги.
- коэффициент трения о поверхность дороги.
При трогании автомобиля с места или при движении с определенной скоростью по наклонной дороге действует следующая формула:
 (5)
(5)
После изменения получим
 (6)
(6)
В шине CAN имеется возможность просмотреть значение LgtAccel сигнала Ax, отправленного блоком управления подушками безопасности (Airbag Module, ABM), и узнать текущее значение ускорения автомобиля а, и тогда
Если автомобиль располагается на склоне в состоянии покоя, то LgtAccel= ; отсюда можно получить угол наклона дороги α;
; отсюда можно получить угол наклона дороги α;
Если автомобиль движется по склону с определенной скоростью, то LgtAccel= ; и отсюда также можно получить угол наклона дороги α.
; и отсюда также можно получить угол наклона дороги α.
В зависимости от отношения угла наклона дороги α к предварительно заданной пороговой величине можно точно определить, в каком состоянии наклона в данный момент находится автомобиль: на спуске, на подъеме или на ровном участке. В примере реализации 1 диапазон предварительно заданной пороговой величины для примера задан в значении 0±5%.
Шаг 103, если упомянутый автомобиль находится в состоянии движения по спуску, то упомянутый модуль общего контроля при помощи упомянутого модуля контроля спуска по склону будет осуществлять управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины.
В данном примере реализации изобретения, как показано на Фиг. 4, если модуль определения угла наклона обнаружит, что автомобиль находится в состоянии спуска по склону, то блок общего управления VCU в соответствии с режимом управления при спуске по склону координирует работу всех подсистем; например, посылает сигнал управления о текущем режиме управления автомобилем (к примеру, о режиме управления, соответствующему условиям бездорожья) на модуль управления двигателем EMS, модуль управления КПП TCU, модуль управления полным приводом, модуль управления подвеской и модуль электронной стабилизации, реализуя соответствующую для данного режима предварительно заданную стратегию (их описание представлено в Таблице 1). Если обнаружено, что автомобиль движется на спуск, то управление автомобилем может осуществляться согласно функции контроля движения по спуску; в примере реализации 1 такой режим может быть независимым от текущего используемого режима управления автомобилем. Если обнаружено, что автомобиль движется на спуск, то произойдет запуск в работу функции контроля спуска по склону.
Шаг 104, если упомянутый автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля посредством упомянутого модуля помощи при трогании с места на подъеме будет осуществлять контроль за состоянием движения автомобиля.
В данном примере реализации изобретения, как показано на Фиг. 4, если модуль определения угла наклона обнаружит, что автомобиль находится в состоянии подъема по склону, то блок общего управления VCU в соответствии с режимом управления при подъеме по склону координирует работу всех подсистем; например, посылает сигнал управления о текущем режиме управления автомобилем (к примеру, о режиме управления, соответствующему условиям бездорожья) на модуль управления двигателем EMS, модуль управления КПП TCU, модуль управления полным приводом, модуль управления подвеской и модуль электронной стабилизации, реализуя соответствующую для данного режима предварительно заданную стратегию (их описание представлено в Таблице 1).
Шаг 105, если обнаружено, что упомянутый автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
В данном примере реализации изобретения, как показано на Фиг. 4, если модуль определения угла наклона обнаружит, что автомобиль находится в состоянии без наклона, то определяется, что водитель запрашивает включение круиз-контроля по бездорожью; в этом случае блок общего управления VCU в соответствии с режимом круиз-контроля по бездорожью координирует работу всех подсистем; например, посылает сигнал управления о текущем режиме управления автомобилем (к примеру, о режиме управления, соответствующему условиям бездорожья) на модуль управления двигателем EMS, модуль управления КПП TCU, модуль управления полным приводом, модуль управления подвеской и модуль электронной стабилизации, реализуя соответствующую для данного режима предварительно заданную стратегию (их описание представлено в Таблице 1). В примере реализации 1 режим круиз-контроля по бездорожью работает параллельно с режимом управления автомобилем, как показано на Фиг. 2, при активации запроса на включение круиз-контроля по бездорожью активации сигнала режима управления автомобилем не происходит.
В данном примере реализации изобретения, когда автомобиль движется со включенной функцией управления на бездорожье, функция круиз-контроля по бездорожью определяется как включенная; если упомянутая функция круиз-контроля по бездорожью находится во включенном состоянии, то с помощью модуля определения угла наклона определяется состояние наклона движения автомобиля. Если обнаружено, что автомобиль находится в состоянии движения вниз по склону, то упомянутый модуль общего контроля с помощью упомянутого модуля контроля спуска по склону осуществляет управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины. Если обнаружено, что автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля осуществляет контроль состояния движения автомобиля посредством упомянутого модуля помощи при трогании с места на подъеме. Если обнаружено, что автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье. Таким образом, в условиях бездорожья реализуется контроль над скоростью движения автомобиля и обеспечивается плавность выхода тяги.
Пример реализации 2
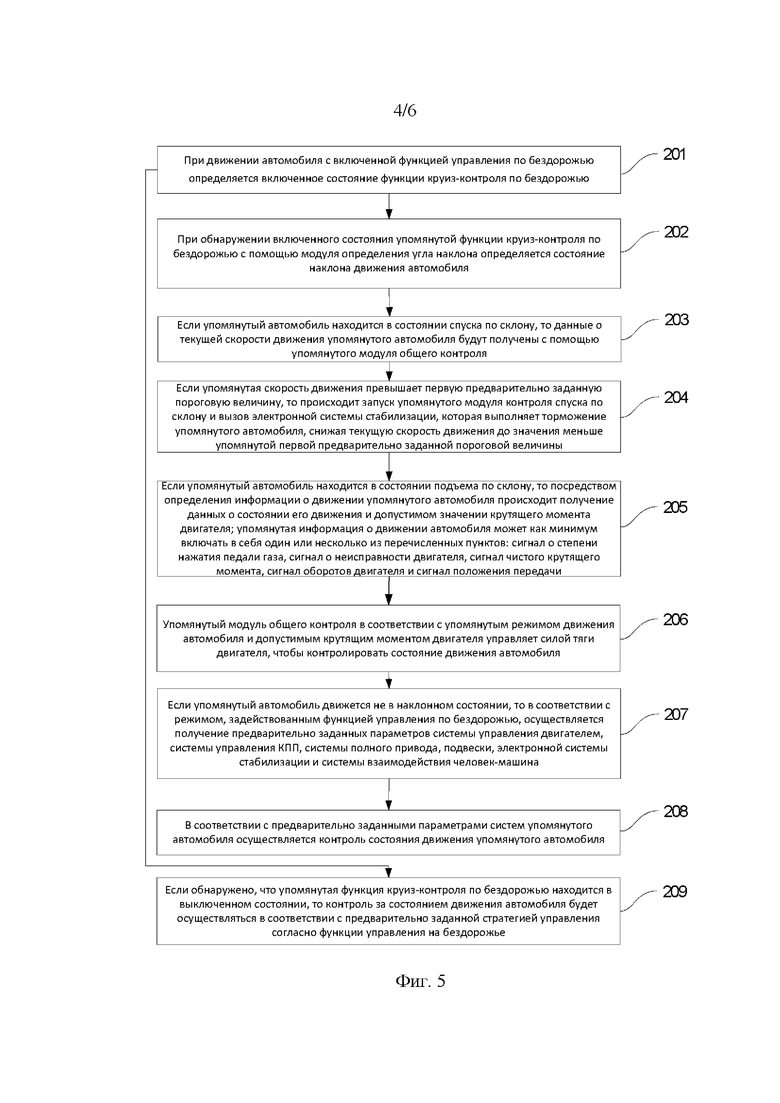
На Фиг. 5 представлена схема последовательности операций упомянутого способа управления автомобилем по примеру реализации данного изобретения, в том числе автомобиль включает в себя модуль определения угла наклона, модуль общего контроля, модуль помощи при трогании с места на подъеме и модуль контроля спуска по склону; а способ может включать в себя следующую последовательность:
Шаг 201, при движении автомобиля с включенной функцией управления по бездорожью определение включенного состояния функции круиз-контроля по бездорожью.
Данный шаг аналогичен шагу 101 и здесь подробно не описывается.
Шаг 202, при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определяется состояние наклона движения автомобиля.
Данный шаг аналогичен шагу 102 и здесь подробно не описывается.
Шаг 203, если упомянутый автомобиль находится в состоянии спуска по склону, то данные о текущей скорости движения упомянутого автомобиля будут получены с помощью упомянутого модуля общего контроля.
В данном примере реализации изобретения, если упомянутый автомобиль находится в состоянии спуска по склону, то измеренные данные текущей скорости движения будут получены от установленного на данном автомобиле чувствительного элемента.
Шаг 204, если упомянутая скорость движения превышает первую предварительно заданную пороговую величину, то происходит запуск упомянутого модуля контроля спуска по склону и вызов электронной системы стабилизации ESP, которая выполняет торможение упомянутого автомобиля, снижая текущую скорость движения до значения меньше упомянутой первой предварительно заданной пороговой величины.
В данном примере реализации изобретения, когда скорость автомобиля превышает определенный порог (например, 8 км/ч), то есть первую пороговую величину, происходит запуск функции HDC модуля контроля спуска по склону; в результате с помощью системы ESP увеличивается усилие торможения, чтобы обеспечить скорость движения автомобиля в пределах установленного диапазона, например в 8±1 км/ч. Когда скорость автомобиля превысит 60 км/ч, происходит выключение данной функции; если возникает необходимость ее использования, то для задействования данной функции следует повторно нажать на соответствующую кнопку включения модуля контроля спуска по склону.
Шаг 205, если упомянутый автомобиль находится в состоянии подъема по склону, то посредством определения информации о движении упомянутого автомобиля происходит получение данных о состоянии его движения и допустимом значении крутящего момента двигателя; упомянутая информация о движении автомобиля может как минимум включать в себя один или несколько из перечисленных пунктов: сигнал о степени нажатия педали газа, сигнал о неисправности двигателя, сигнал чистого крутящего момента, сигнал оборотов двигателя и сигнал положения передачи.
В данном примере реализации изобретения, когда модуль определения угла наклона определяет, что автомобиль находится в состоянии подъема по склону, чтобы обеспечить плавное трогание с места без соскальзывания и с определенным ускорением, выполняются следующие операции:
а. Блок общего управления в соответствии с сигналом степени нажатия педали газа, сигналом чистого крутящего момента двигателя, сигналом оборотов двигателя и сигналом положения передачи определяет намерения водителя и текущий допустимый крутящий момент двигателя. В примере реализации 1 внешняя характеристика двигателя заключается в том, что при определенных оборотах двигателя и определенной степени нажатия педали газа может быть получен текущий крутящий момент двигателя, вышеуказанные данные также могут быть получены в соответствии с измеренными в ходе испытаний КПД двигателя и его механических потерь. При этом вышеуказанный сигнал будет сохранен в сети CAN и легко доступен при дальнейшем использовании.
b. Блок общего управления в соответствии с сигналом скорости вращения четырех колес, сигналом угловой скорости рыскания YawRate, сигналом ручного тормоза или рабочим сигналом EPB и сигналом фонарей стоп-сигнала определяет состояние движения автомобиля или коэффициент скольжения колес;
с. С учетом сигнала продольного ускорения автомобиля LgtAccel рассчитывается уклон α; усилие, которое двигателю необходимо преодолеть при трогании автомобиля с места, составляет  ;
;
d. В момент трогания с места автомобиль создает определенное ускорение а, блок общего управления задает величину в определенном диапазоне (например, 0,2-0,3 g); сила тяги, которую двигателю необходимо предоставить в этот момент, рассчитывается по формуле (7), блок общего управления будет автоматически контролировать обороты двигателя и целевое положение передачи, чтобы гарантировать нужную величину силы тяги двигателя.
 (7)
(7)
Шаг 206, упомянутый модуль общего контроля в соответствии с упомянутым режимом движения автомобиля и допустимым крутящим моментом двигателя управляет силой тяги двигателя, чтобы контролировать состояние движения автомобиля.
В данном примере реализации изобретения после трогания с места автомобиль будет двигаться вверх по склону с заданной равномерной скоростью, диапазон скорости может быть задан разработчиком. По формуле (5) сила тяги, которую двигателю необходимо предоставить в этот момент, составит  , блок общего управления будет автоматически контролировать обороты двигателя и целевое положение передачи, чтобы гарантировать нужную величину силы тяги двигателя, что в результате приведет к стабилизации управления состоянием движения автомобиля.
, блок общего управления будет автоматически контролировать обороты двигателя и целевое положение передачи, чтобы гарантировать нужную величину силы тяги двигателя, что в результате приведет к стабилизации управления состоянием движения автомобиля.
Шаг 207, если упомянутый автомобиль движется не в наклонном состоянии, то в соответствии с режимом, задействованным функцией управления по бездорожью, осуществляется получение предварительно заданных параметров системы управления двигателем, системы управления КПП, системы полного привода, подвески, электронной системы стабилизации и системы взаимодействия человек-машина.
В данном примере реализации изобретения, когда модуль определения угла наклона определяет, что текущий угол наклона автомобиля находится в заданном диапазоне или отсутствует, то делается вывод, что автомобиль движется по ровному участку; если при этом выключатель ОСС остается в нажатом положении, то это рассматривается как запрос водителя на задействование функции круиз-контроля по бездорожью.
Когда OffRoad_CC_Req=active, блок общего управления по формуле (1) рассчитывает необходимую текущую силу тяги двигателя, за счет чего обеспечивается нужный крутящий момент, и контролирует следующее взаимодействие соответствующих систем:
Система EMS: откликается на запрос крутящего момента, посылаемый блоком общего управления, и осуществляет вывод постоянного или колеблющегося в заданном диапазоне реального крутящего момента; в примере реализации 1 сбор данных о фактическом крутящем моменте может осуществляться напрямую из сети CAN.
Система TCU: откликается на посылаемый блоком общего управления сигнал управления положением передач и одновременно с этим в соответствии со скоростью вращения двигателя, степенью нажатия педали газа и информацией о скорости движения управляет текущим положением передачи и целевым положением передачи автомобиля;
Система полного привода: откликается на команду привода, отправляемую блоком общего управления, одновременно с этим включается низкоскоростной режим полного привода, осуществляется центральная блокировка дифференциала, автомобиль входит в режим постоянного полного привода.
Подвеска: поднимается до максимальной высоты
Система ESP: контролирует состояние колес и коэффициент скольжения колес в пределах заданного режима, предотвращая потерю мощности вследствие чрезмерного проскальзывания колес. Упомянутый здесь заданный диапазон может составлять, например, 10-18%, а также может быть задан разработчиком или получен из соответствующей таблицы; шкала данного диапазона может изменяться в зависимости от скорости движения и замедления автомобиля. Принцип в целом заключается в том, чтобы в максимально возможной степени гарантировать использование продольной силы контакта колес с поверхностью дороги, с целью сократить тормозное расстояние, а также гарантировать наличие определенной возможности управления автомобилем.
λ - коэффициент скольжения колес, -∞<λ≤100%
 (8)
(8)
Где V - скорость движения, r - радиус качения колеса, ω - скорость вращения колеса.
Коэффициент скольжения автомобиля также может быть выражен в виде

Система HMI: на приборной панели могут располагаться индикаторы, отображающие состояние езды по бездорожью, наличие наклона, текущего подъема или спуска автомобиля, а также отображать текущую заданную водителем скорость движения и поддерживаемый системой по умолчанию безопасный диапазон скорости.
В режиме круиз-контроля по бездорожью все системы координируют свою работу между собой посредством соответствующих откликов, что обеспечивает автоматический контроль степени нажатия педали газа и удержание равномерной скорости движения автомобиля на участках бездорожья, предоставляя водителю возможность отвечать только за рулевое управление.
Шаг 208, в соответствии с предварительно заданными параметрами систем упомянутого автомобиля осуществляется контроль состояния движения упомянутого автомобиля.
В данном примере реализации изобретения, как это указано в предыдущем шаге, все системы, например, такие как система EMS, система TCU, система полного привода, подвеска, система ESP и система HMI, работают согласно соответствующим параметрам предварительно заданного режима, обеспечивая стабильное состояние движения автомобиля. Упомянутый здесь предварительно заданный режим может представлять собой управление крутящим моментом в соответствии со скоростью движения, выбранной водителем, когда автомобиль движется по участку без наклона в режиме бездорожья, процесс управления аналогичен процессу расчета крутящего момента при подъеме по склону. Соответствующие параметры представляют собой фактически рассчитанные параметры крутящего момента.
Шаг 209, если обнаружено, что упомянутая функция круиз-контроля по бездорожью находится в выключенном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
В данном примере реализации изобретения, когда модуль определения ОСС блока общего управления определит, что выключатель ОСС не нажат, то при OffRoad_CC_Req=not active управление автомобилем будет осуществляться в соответствии с сигналом выключателя режима управления, то есть в режимах управления на бездорожье, представленных в Таблице 1. Модуль общего контроля посылает соответствующие сигналы в системы и осуществляет их управление; системы, например, такие как система EMS, система TCU, система полного привода, подвеска, система ESP и система HMI, работают согласно соответствующим параметрам предварительно заданного режима, обеспечивая стабильное состояние движения автомобиля.
В данном примере реализации изобретения с помощью имеющихся на машине датчиков и сигналов шины CAN посредством расчета угла наклона автомобиля определяется состояние автомобиля. Если обнаружено, что автомобиль находится в состоянии подъема по склону, то блок общего управления рассчитывает крутящий момент для трогания с места на подъеме и крутящий момент тяги для обеспечения стабильного движения после старта, что обеспечивает контроль плавного преодоления подъема автомобилем. Если обнаружено, что автомобиль находится в состоянии спуска по склону, то блок общего управления проверяет информацию о скорости движения автомобиля и посредством привода управления торможения системы ESP обеспечивает скорость спуска по склону. Если обнаружено, что автомобиль находится на ровном участке дороге, и водитель подал запрос на включение круиз-контроля по бездорожью, то блок общего управления, контролируя все силовые системы, обеспечивает вход компонентов полного привода автомобиля в режим бездорожья, посредством системы ESP снижается пробуксовка автомобиля, за счет чего реализуется более точное управление автомобилем в режиме круиз-контроля в условиях бездорожья.
Пример реализации 3
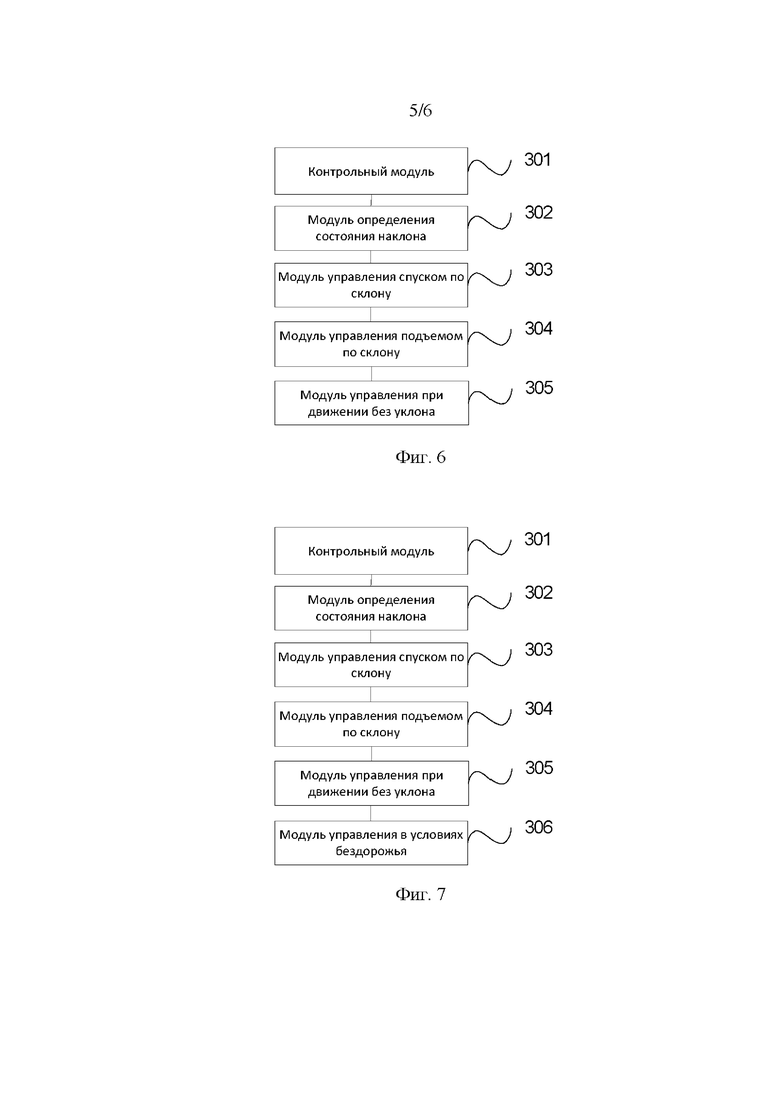
На Фиг. 6 представлена структурированная блок-схема устройства управления автомобилем по примеру реализации данного изобретения, при этом упомянутый автомобиль включает в себя модуль определения угла наклона, модуль общего контроля, модуль помощи при трогании с места на подъеме и модуль контроля спуска по склону; а устройство управления может включать в себя следующие модули:
контрольный модуль 301, модуль определения состояния наклона 302, модуль управления спуском по склону 303, модуль управления подъемом по склону 304 и модуль управления при движении без уклона 305.
На Фиг. 7 ниже приведено подробное описание функционала каждого модуля и указана их взаимная связь.
Контрольный модуль 301, использующийся для того, чтобы при движении автомобиля с включенной функцией управления по бездорожью определять включенное состояние функции круиз-контроля по бездорожью;
Модуль определения состояния наклона 302, использующийся для того, чтобы при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определять состояние наклона движения автомобиля;
Модуль управления спуском по склону 303, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии движения по спуску, то упомянутый модуль общего контроля при помощи упомянутого модуля контроля спуска по склону осуществлял управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины;
Модуль управления подъемом по склону 304, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля при помощи упомянутого модуля помощи при трогании с места на подъеме осуществлял контроль за состоянием движения автомобиля;
Модуль управления при движении без уклона 305, использующийся для того, чтобы если упомянутый автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля осуществлялся в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
Предпочтительно, чтобы модуль управления спуском по склону 303 включал в себя:
субмодуль получения скорости движения, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии спуска по склону, то получение данных о текущей скорости движения упомянутого автомобиля осуществлялось с помощью упомянутого модуля общего контроля;
субмодуль управления скоростью движения, использующийся для того, чтобы если упомянутая скорость движения превышает первую предварительно заданную пороговую величину, то происходил запуск упомянутого модуля контроля спуска по склону и вызов электронной системы стабилизации ESP, которая выполняет торможение упомянутого автомобиля, снижая текущую скорость движения до значения меньше упомянутой первой предварительно заданной пороговой величины.
Предпочтительно, чтобы модуль управления подъемом по склону 304 включал в себя:
субмодуль получения состояния движения, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии подъема по склону, то посредством определения информации о движении упомянутого автомобиля происходило получение данных о состоянии его движения и допустимом значении крутящего момента двигателя; упомянутая информация о движении автомобиля может как минимум включать в себя один или несколько из перечисленных пунктов: сигнал о степени нажатия педали газа, сигнал о неисправности двигателя, сигнал чистого крутящего момента, сигнал оборотов двигателя и сигнал положения передачи;
субмодуль управления, использующийся для того, чтобы упомянутый модуль общего контроля в соответствии с упомянутым режимом движения автомобиля и допустимым крутящим моментом двигателя управлял силой тяги двигателя, чтобы контролировать состояние движения автомобиля.
Предпочтительно, чтобы модуль управления при движении без уклона 305 включал в себя:
субмодуль получения параметров движения, использующийся для того, чтобы если упомянутый автомобиль движется не в наклонном состоянии, то в соответствии с режимом, задействованным функцией управления по бездорожью, осуществлялось получение предварительно заданных параметров системы управления двигателем, системы управления КПП, системы полного привода, подвески, электронной системы стабилизации и системы взаимодействия человек-машина;
субмодуль управления автомобилем, использующийся для того, чтобы в соответствии с предварительно заданными параметрами систем упомянутого автомобиля осуществлялся контроль состояния движения упомянутого автомобиля.
Предпочтительно, чтобы данное устройство управления автомобилем также включало в себя:
модуль управления движением по бездорожью 306, использующийся для того, чтобы если упомянутая функция круиз-контроля по бездорожью находится в выключенном состоянии, то контроль за состоянием движения автомобиля осуществлялся в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
В данном примере реализации изобретения с помощью имеющихся на машине датчиков и сигналов шины CAN посредством расчета угла наклона автомобиля определяется состояние автомобиля. Если обнаружено, что автомобиль находится в состоянии подъема по склону, то блок общего управления рассчитывает крутящий момент для трогания с места на подъеме и крутящий момент тяги для обеспечения стабильного движения после старта, что обеспечивает контроль плавного преодоления подъема автомобилем. Если обнаружено, что автомобиль находится в состоянии спуска по склону, то блок общего управления проверяет информацию о скорости движения автомобиля и посредством привода управления торможения системы ESP обеспечивает скорость спуска по склону. Если обнаружено, что автомобиль находится на ровном участке дороге, и водитель подал запрос на включение круиз-контроля по бездорожью, то блок общего управления, контролируя все силовые системы, обеспечивает вход компонентов полного привода автомобиля в режим бездорожья, посредством системы ESP снижается пробуксовка автомобиля, за счет чего реализуется более точное управление автомобилем в режиме круиз-контроля в условиях бездорожья.
Вышеописанные примеры реализации устройства носят исключительно показательный характер, в том числе модули, упомянутые как раздельные компоненты, могут являться или не являться физически разделенными, а компоненты, отображаемые как модули, могут являться или не являются физическими модулями, то есть могут располагаться как в одном определенном месте, так и быть распределены по нескольким компонентам сети. Чтобы реализовать цель примеров реализации изобретения, в зависимости от фактической необходимости можно выбрать несколько модулей или все модули. Рядовой технический персонал данной сферы, при условии неиспользования изобретательского труда, может понять и реализовать указанные цели.
Компоненты в примерах реализации данного изобретения могут представлять собой исключительно аппаратные средства, а также могут быть реализованы в виде программных модулей, работающих на одном или нескольких процессорах, или представлять собой их сочетание. Технический персонал данной сферы должен понимать, что посредством применения на практике микропроцессора или цифрового сигнального процессора (DSP) можно реализовать частичный или полный функционал некоторых или всех компонентов электронного устройства по примеру реализации данного изобретения. Данное изобретение также может быть реализовано посредством части или полного состава оборудования или программы устройства, предназначенных для исполнения описываемого здесь способа (например, компьютерной программы или компьютерного программного продукта). Такая реализующая данное изобретение программа может храниться в машинно-читаемой среде или иметь форму одного или нескольких сигналов. Такой сигнал может быть получен посредством загрузки или скачивания с интернет-сайта или предоставляться на сигнале-носителе, или предоставляться в любой другой форме.
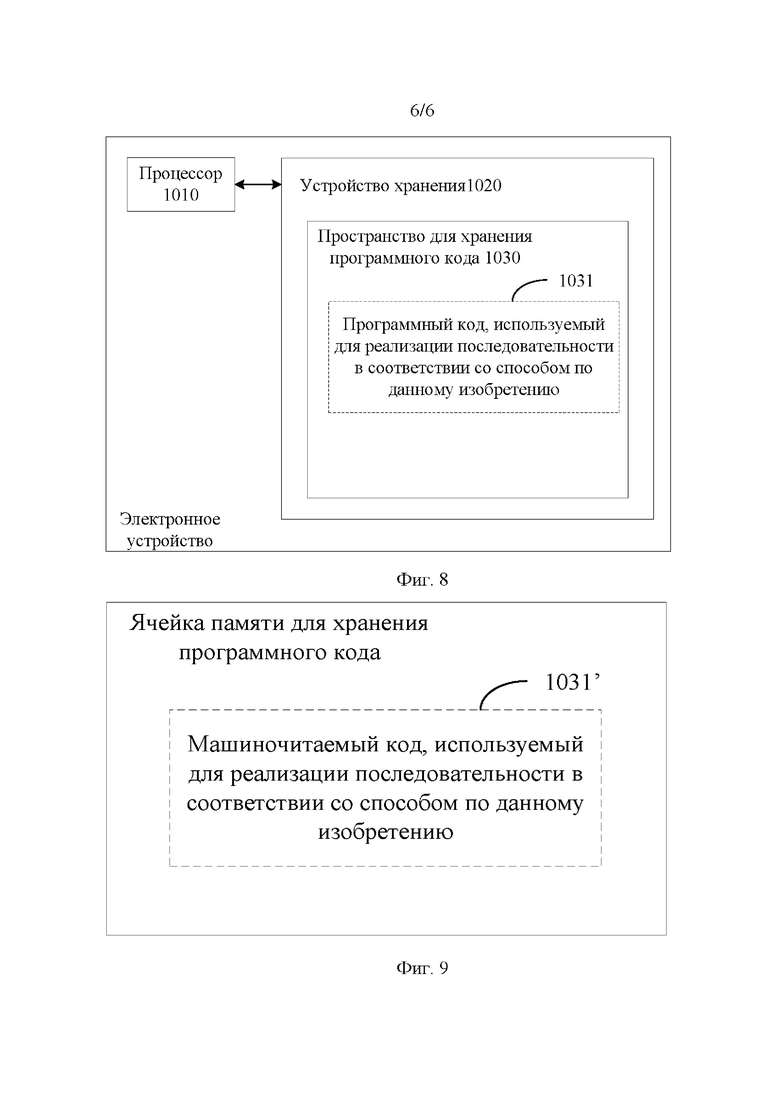
Например, на Фиг. 8 представлено электронное устройство, способное реализовать способ управления автомобилем по данному изобретению, в качестве примера представлен автомобильный бортовой компьютер. Такое электронное устройство традиционно включает в себя процессор 1010 и компьютерный программный продукт или машиночитаемую среду в виде устройства хранения 1020. Устройство хранения 1020 может представлять собой такие электронные устройства хранения как флеш-память, EEPROM (электрически стираемое программируемое постоянное запоминающее устройство), EPROM, жесткий диск или ROM. Устройство хранения 1020 имеет пространство хранения 1030, используемое для хранения программного кода 1031, выполняющего последовательность одного из методов реализации упомянутого способа управления автомобилем. Например, пространство хранения 1030, используемое для хранения программного кода, также может содержать разные программные коды 1031 с разной последовательностью, применяемые для реализации вышеуказанного способа. Эти программные коды могут считываться с одного или нескольких компьютерных программных продуктов и записываться на один или несколько компьютерных программных продуктов. Указанные компьютерные программные продукты могут представлять собой такие носители программного кода как жесткий диск, компакт-диск (CD), устройство хранения или дискета. Такого рода компьютерные программные продукты, как правило, представляют собой портативные или стационарные ячейки памяти, аналогичные той, которая справочно представлена на Фиг. 9. Такая ячейка памяти может иметь сегменты хранения и пространство для хранения, расположенные аналогично устройству хранения 1020 электронного устройства, представленного на Фиг. 8. Программный код может быть, к примеру, сжат в соответствующий формат. Обычно ячейка памяти включает в себя машиночитаемый код 1031’, то есть код, который может быть прочитан, к примеру, процессором типа 1010; запуск таких кодов на электронном устройстве приводит к выполнению данным устройством последовательности для реализации вышеописанных способов управления автомобилем.
Использованные в данном тексте термины «один пример реализации», «пример реализации» или «один или несколько примеров реализации» подразумевают, что описанные в сочетании с примером реализации конкретный признак, структура или характеристика, включены по меньшей мере в один пример реализации данного изобретения. Кроме этого, следует иметь в виду, что приведенное здесь понятие «в одном примере реализации» необязательно означает один и тот же пример реализации.
Представленное здесь описание содержит большое количество конкретных деталей. Но, тем не менее, следует понимать, что примеры реализации данного изобретения могут быть практически осуществлены и без перечисленных здесь конкретных деталей. В некоторых примерах реализации, чтобы не усложнять понимание данного описания, общеизвестные способы, структуры и методы не представлены подробно,
Также необходимо обратить внимание на то, что упомянутые примеры реализации иллюстрируют настоящее изобретение, но не создают для данного изобретения каких-либо ограничений, при этом технический персонал данной сферы, не отступая от сферы представленной формулы изобретения, может разработать альтернативные примеры реализации. В формуле изобретения любые приводимые между скобками для справки конструкции из символов не должны рассматриваться как ограничение для формулы изобретения. Термин «включает» не исключает существования элементов или шагов последовательности, не перечисленных в формуле изобретения. Наличие перед элементом числа «1» или термина «один» не исключает существования нескольких таких элементов. Данное изобретение может быть реализовано с помощью аппаратного обеспечения, включающего в себя несколько разных элементов, а также с помощью соответствующим образом запрограммированного компьютера. В пунктах формулы изобретения, перечисляющих несколько устройств, некоторые из этих устройств могут представлять собой один и тот же элемент аппаратного обеспечения. Использование терминов «первый», «второй», «третий» и т. д. не выражает какой-либо последовательности. Эти термины можно понимать как название.
Кроме того, следует также обратить внимание на то, что язык, используемый в данном описании, в основном выбран для удобства чтения и обучения, а не для объяснения или ограничения предмета данного изобретения. Поэтому без отступления от сферы и сути прилагаемой формулы изобретения для рядового технического персонала данной сферы будет очевидным наличие множества изменений и модификаций. Касательно сферы данного изобретения, публичное заявление, сделанное для данного изобретения, является иллюстративным, но не ограничивающим; сфера данного изобретения определяется прилагаемой формулой изобретения.
В завершении также следует указать, что вышеприведенные примеры реализации используются исключительно для описания технических решений данного изобретения и не создают для данного изобретения каких-либо ограничений. Несмотря на то, что настоящее изобретение было подробно описано со ссылкой на вышеприведенные примеры реализации, технический персонал данной сферы должен понимать, что он, тем не менее, может модифицировать представленные в вышеприведенных примерах реализации технические решения или заменять часть содержащихся в них технических характеристик на другие эквивалентные характеристики, при этом все произведенные модификации и замены не отходят от сущности и сферы технических решений примеров реализации настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2521931C2 |
| СИСТЕМА АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ И СПОСОБ АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ, ПОДДЕРЖИВАЮЩИЕ РАСПОЗНАВАНИЕ СИГНАЛОВ СВЕТОФОРА | 2020 |
|
RU2790742C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АВАРИЙНЫМ ТОРМОЖЕНИЕМ, ЭЛЕКТРОННЫЙ БЛОК УПРАВЛЕНИЯ И АВТОМОБИЛЬ | 2018 |
|
RU2747828C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
| Автомобильная вспомогательная система и способ управления | 2018 |
|
RU2765256C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОЙ ДВИЖУЩЕЙ СИЛЫ АВТОМОБИЛЯ | 2010 |
|
RU2540361C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
Предложен способ управления автомобилем. При движении автомобиля с включенной функцией управления по бездорожью определяют включенное состояние функции круиз-контроля по бездорожью. При обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определяют состояние наклона движения автомобиля. Если автомобиль находится в состоянии движения по спуску, то модуль общего контроля при помощи модуля контроля спуска по склону будет осуществлять управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины. Если автомобиль находится в состоянии подъема по склону, то модуль общего контроля при помощи модуля помощи при трогании с места на подъеме будет осуществлять контроль за состоянием движения автомобиля. Если обнаружено, что автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье. Предложены также устройство управления автомобилем, машиночитаемая среда. Достигается повышение безопасности при подъемах, предотвращение потери управления автомобилем, предотвращение пробуксовки или соскальзывания со склона. 3 н. и 8 з.п. ф-лы, 9 ил., 1 табл.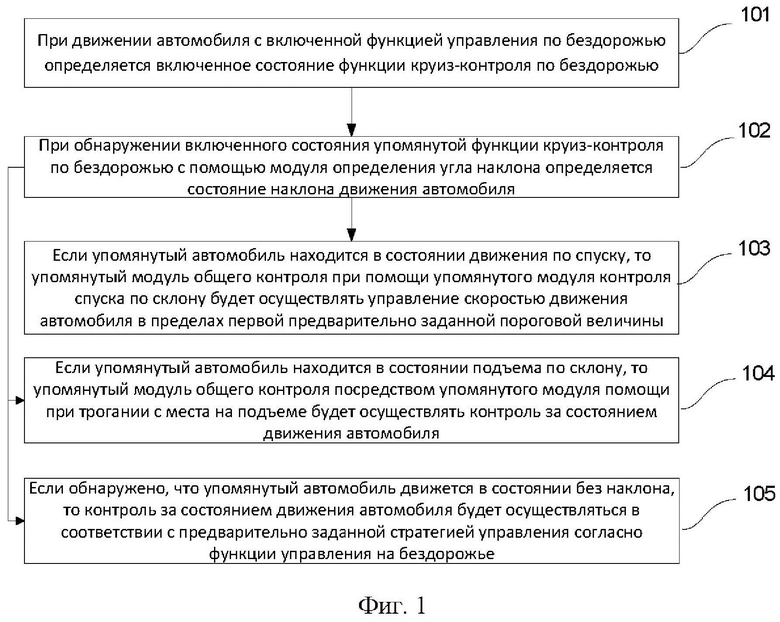
1. Способ управления автомобилем, характеризующийся тем, что упомянутый автомобиль включает в себя модуль определения угла наклона, модуль общего контроля, модуль помощи при трогании с места на подъеме и модуль контроля спуска по склону; упомянутый способ включает в себя следующее:
при движении автомобиля с включенной функцией управления по бездорожью определяется включенное состояние функции круиз-контроля по бездорожью;
при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определяется состояние наклона движения автомобиля;
если упомянутый автомобиль находится в состоянии движения по спуску, то упомянутый модуль общего контроля при помощи упомянутого модуля контроля спуска по склону будет осуществлять управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины;
если упомянутый автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля при помощи упомянутого модуля помощи при трогании с места на подъеме будет осуществлять контроль за состоянием движения автомобиля;
если обнаружено, что упомянутый автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
2. Способ управления автомобилем по п. 1, характеризующийся тем, что также включает в себя следующее:
если обнаружено, что упомянутая функция круиз-контроля по бездорожью находится в выключенном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
3. Способ управления автомобилем по п. 1, характеризующийся тем, что если упомянутый автомобиль находится в состоянии движения по спуску, то модуль общего контроля при помощи упомянутого модуля контроля спуска по склону будет осуществлять управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины согласно последовательности, которая включает в себя следующее:
если упомянутый автомобиль находится в состоянии спуска по склону, то данные о текущей скорости движения упомянутого автомобиля будут получены с помощью упомянутого модуля общего контроля;
если упомянутая скорость движения превышает первую предварительно заданную пороговую величину, то происходит запуск упомянутого модуля контроля спуска по склону и вызов электронной системы стабилизации, которая выполняет торможение упомянутого автомобиля, снижая текущую скорость движения до значения меньше упомянутой первой предварительно заданной пороговой величины.
4. Способ управления автомобилем по п. 1, характеризующийся тем, что если упомянутый автомобиль находится в состоянии движения вверх по склону, то модуль общего контроля при помощи упомянутого модуля контроля спуска по склону будет осуществлять управление состоянием движения автомобиля согласно последовательности, которая включает в себя следующее:
если упомянутый автомобиль находится в состоянии подъема по склону, то посредством определения информации о движении упомянутого автомобиля происходит получение данных о состоянии его движения и допустимом значении крутящего момента двигателя; упомянутая информация о движении автомобиля включает в себя один или несколько из перечисленных пунктов: сигнал о степени нажатия педали газа, сигнал о неисправности двигателя, сигнал чистого крутящего момента, сигнал оборотов двигателя и сигнал положения передачи;
упомянутый модуль общего контроля в соответствии с упомянутым режимом движения автомобиля и допустимым крутящим моментом двигателя управляет силой тяги двигателя, чтобы контролировать состояние движения автомобиля.
5. Способ управления автомобилем по п. 4, характеризующийся тем, что если упомянутый автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля будет осуществляться в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье в последовательности, которая включает в себя следующее:
если упомянутый автомобиль движется не в наклонном состоянии, то в соответствии с режимом, задействованным функцией управления по бездорожью, осуществляется получение предварительно заданных параметров системы управления двигателем, системы управления КПП, системы полного привода, подвески, электронной системы стабилизации и системы взаимодействия человек-машина;
в соответствии с предварительно заданными параметрами систем упомянутого автомобиля осуществляется контроль состояния движения упомянутого автомобиля.
6. Устройство управления автомобилем, характеризующееся тем, что упомянутый автомобиль включает в себя модуль определения угла наклона, модуль общего контроля,
модуль помощи при трогании с места на подъеме и модуль контроля спуска по склону; упомянутое устройство включает в себя следующее:
контрольный модуль, использующийся для того, чтобы при движении автомобиля с включенной функцией управления по бездорожью определять включенное состояние функции круиз-контроля по бездорожью;
модуль определения состояния наклона, использующийся для того, чтобы при обнаружении включенного состояния упомянутой функции круиз-контроля по бездорожью с помощью модуля определения угла наклона определять состояние наклона движения автомобиля;
модуль управления спуском по склону, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии движения по спуску, то упомянутый модуль общего контроля при помощи упомянутого модуля контроля спуска по склону осуществлял управление скоростью движения автомобиля в пределах первой предварительно заданной пороговой величины;
модуль управления подъемом по склону, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии подъема по склону, то упомянутый модуль общего контроля при помощи упомянутого модуля помощи при трогании с места на подъеме осуществлял контроль за состоянием движения автомобиля;
модуль управления при движении без уклона, использующийся для того, чтобы если упомянутый автомобиль движется не в наклонном состоянии, то контроль за состоянием движения автомобиля осуществлялся в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
7. Устройство управления автомобилем по п. 6, характеризующееся тем, что также включает в себя следующее:
модуль управления движением по бездорожью, использующийся для того, чтобы если упомянутая функция круиз-контроля по бездорожью находится в выключенном состоянии, то контроль за состоянием движения автомобиля осуществлялся в соответствии с предварительно заданной стратегией управления согласно функции управления на бездорожье.
8. Устройство управления автомобилем по п. 6, характеризующееся тем, что упомянутый модуль управления спуском по склону включает в себя следующее:
субмодуль получения скорости движения, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии спуска по склону, то получение данных о текущей скорости движения упомянутого автомобиля осуществлялось с помощью упомянутого модуля общего контроля;
субмодуль управления скоростью движения, использующийся для того, чтобы если упомянутая скорость движения превышает первую предварительно заданную пороговую величину, то происходил запуск упомянутого модуля контроля спуска по склону и вызов электронной системы стабилизации, которая выполняет торможение упомянутого автомобиля, снижая текущую скорость движения до значения меньше упомянутой первой предварительно заданной пороговой величины.
9. Устройство управления автомобилем по п. 6, характеризующееся тем, что упомянутый модуль управления подъемом по склону включает в себя следующее:
субмодуль получения состояния движения, использующийся для того, чтобы если упомянутый автомобиль находится в состоянии подъема по склону, то посредством определения информации о движении упомянутого автомобиля происходило получение данных о состоянии его движения и допустимом значении крутящего момента двигателя; упомянутая информация о движении автомобиля включает в себя один или несколько из перечисленных пунктов: сигнал о степени нажатия педали газа, сигнал о неисправности двигателя, сигнал чистого крутящего момента, сигнал оборотов двигателя и сигнал положения передачи;
субмодуль управления, использующийся для того, чтобы упомянутый модуль общего контроля в соответствии с упомянутым режимом движения автомобиля и допустимым крутящим моментом двигателя управлял силой тяги двигателя, чтобы контролировать состояние движения автомобиля.
10. Устройство управления автомобилем по п. 9, характеризующееся тем, что упомянутый модуль управления при движении без уклона включает в себя следующее:
субмодуль получения параметров движения, использующийся для того, чтобы если упомянутый автомобиль движется не в наклонном состоянии, то в соответствии с режимом, задействованным функцией управления по бездорожью, осуществлялось получение предварительно заданных параметров системы управления двигателем, системы управления КПП, системы полного привода, подвески, электронной системы стабилизации и системы взаимодействия человек-машина;
субмодуль управления автомобилем, использующийся для того, чтобы в соответствии с предварительно заданными параметрами систем упомянутого автомобиля осуществлялся контроль состояния движения упомянутого автомобиля.
11. Машиночитаемая среда, в которой хранится компьютерная программа, включающая в себя машиночитаемый код, причем запуск упомянутого машиночитаемого кода на электронном устройстве приводит к выполнению упомянутым электронным устройством способа управления автомобилем по любому из пп. 1-5.
| CN 104125906 A, 29.10.2014 | |||
| CN 101678821 A, 24.03.2010 | |||
| US 8532906 B2, 10.09.2013. |

