Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к техническим областям, связанным с физическими упражнениями, тренировочными средствами, самосовершенствованием и поддержанием здоровья, досугом и развлечением, обучающими бытовыми электроприборами, умным домом и т.п., в частности, к устройству для физических упражнений и способу его использования.
Уровень техники
Существующий электросамокат в основном предназначен для езды и транспортировки, и основными задачами проектирования являются плавность хода и комфортность. Чтобы предотвратить падение пользователя, для существующих электросамокатов существует потребность в плавном выполнении процесса пуска/остановки, процесса вождения и процесса реверсирования. Кроме того, у существующих электросамокатов переключение направления и изменение скорости осуществляется в ручном режиме, так как отсутствуют функции автоматического реверсирования и изменения скорости. У специалистов в данной области техники также не возникнет желания и мотивации для добавления или улучшения функций, противоречащих задачам плавности хода и комфортности.
Сущность изобретения
Технические задачи, решаемые настоящим изобретением, заключаются в следующем: если предположить, что реверсирование будет выполняться путем изменения формы, конструкции, функции, способа управления электросамокатом и/или способа его использования, электросамокат может применяться в областях, связанных с физическими упражнениями и/или обучением и образованием, и, таким образом, выполнены устройства для физических упражнений и способы их использования; и устройство для физических упражнений позволяет пользователю выполнять автоматическое возвратно-поступательное перемещение, пользователь, соответственно, регулирует физическое и психическое состояние, чтобы предотвратить падение, и, таким образом, достигается эффект обучения и тренировки.
В настоящем изобретении для решения технических задач используется одно техническое решение, которое заключается в следующем:
1. Для устройства для физических упражнений и способа его использования устройство для физических упражнений включает в себя несущий блок, блок двигателя(ей) и моста, блок ведомого колеса (ведомых колес) и моста, блок источника питания и блок основной платы управления, и блок основной платы управления включает в себя монтажную плату, микропроцессор и модуль приведения в действие двигателя. Устройство для физических упражнений включает в себя функциональный модуль автоматического реверсирования, который используется для переключения направления вращения двигателя(ей) на обратное через заданные интервалы расстояния и/или времени, чтобы привести в действие устройство для выполнения автоматического возвратно-поступательного перемещения.
Блок двигателя(ей) и моста, блок ведомого колеса (ведомых колес) и моста, блок источника питания и блок основной платы управления смонтированы под несущим блоком, блок источника питания подключен к печатной плате и модулю приведения в действие двигателя, модуль приведения в действие двигателя подключен к двигателю(ям), микропроцессор и модуль приведения в действие двигателя подключены к печатной плате, и микропроцессор подключен к модулю приведения в действие двигателя через печатную плату; и микропроцессор автоматически отправляет сигнал реверсирования в модуль приведения в действие двигателя через заданные интервалы расстояния и/или времени, и модуль приведения в действие двигателя переключает направление движения двигателя на обратное в соответствии с принятым сигналом реверсирования, чтобы заставить устройство выполнять автоматическое возвратно-поступательное перемещение.
Предпочтительно, для способа использования, пользователь стоит или сидит на устройстве, обращен лицом в одну сторону в направлении, перпендикулярном направлению перемещения устройства, и своевременно регулирует центр тяжести тела во время возвратно-поступательного перемещения устройства, чтобы предотвратить падение, и, таким образом, достигается эффект тренировки.
Существующие электросамокаты, как правило, осуществляют движение в одном направлении, пользователь смотрит вперед, во время реверсирования также необходимо ручное вмешательство, хотя некоторые электросамокаты имеют функцию реверсирования, и пользователь должен иметь психологическую подготовку, поэтому существующие электросамокаты являются малоэффективными для физических упражнений. Устройство выполняет автоматическое возвратно-поступательное перемещение без необходимости вмешательства пользователя во время реверсирования, пользователь стоит или сидит на устройстве, ему необходимо в любой момент времени регулировать физическое и психическое состояние, если он хочет предотвратить свое падение, и ему еще больше необходимо справляться с внезапным ударом, особенно во время реверсирования, поэтому устройство является полезным для физических упражнений; и устройство является полезным для расслабления и понижения давления, так как имеет тренировочный эффект "колыбели" с непрерывным и ритмичным перекатыванием из стороны в сторону.
Предпочтительно устройство дополнительно имеет характеристику жесткого реверсирования, то есть устройство незамедлительно начинает движение в обратном направлении без задержки на остановку во время реверсирования.
Некоторые из существующих электросамокатов имеют функцию реверсирования и обязательно используют мягкое реверсирование, хотя и имеют функцию реверсирования, то есть электросамокаты сначала останавливаются или замедляются и затем движутся в обратном направлении, чтобы уменьшить удар и гарантировать плавность хода и комфортность; и устройство может усилить воздействие на пользователя за счет жесткого реверсирования и, таким образом, улучшить эффект тренировки.
Предпочтительно устройство имеет непрерывное автоматическое возвратно-поступательное перемещение, то есть устройство может непрерывно и многократно выполнять автоматическое возвратно-поступательное перемещение после запуска и останавливаться после того, как будет получена команда "стоп" и/или возникнет ненормальное состояние.
Существующий электросамокат не может выполнять непрерывное автоматическое возвратно-поступательное перемещение и в основном используется на открытом воздухе или в обстановке с относительно большим пространством; и устройство может выполнять непрерывное автоматическое возвратно-поступательное перемещение, больше подходит для использования для тренировок в помещении и может использоваться в относительно небольшом пространстве длиной 2 м и шириной 1 м.
Устройство включает в себя блоки лечебного массажа.
Верхняя поверхность каждого блока лечебного массажа включает в себя несколько выпуклостей, блоки лечебного массажа устанавливаются над несущим блоком и могут быть также выполнены как единое целое на верхней поверхности несущего блока посредством гравировки, литья и аналогичным образом, и могут выполняться стимуляция и массаж на участках контакта с пользователем, предоставляя пользователю возможность стоять или сидеть на блоках лечебного массажа.
Предпочтительно каждый блок лечебного массажа представляет собой акупрессурный коврик.
В существующем самокате, чтобы гарантировать удобство, легкость, тонкость и простоту в обращении, верхняя поверхность несущего блока имеет, как правило, слегка вогнутую форму, поверхность является относительно гладкой, или на поверхность наклеена нескользящая абразивная бумага, и на поверхности отсутствуют выпуклости, оказывающие эффект лечебного массажа.
В предшествующем уровне техники некоторые люди предпочитают наступать на неподвижный предмет, такой как кусок булыжника и акупрессурный коврик, для выполнения упражнений и самосовершенствования, но наступать на такой неподвижный предмет относительно скучно, и люди всегда стараются избегать давящие болевые участки, которые больше нуждаются в упражнениях в процессе ходьбы; в то время как пользователь стоит или сидит на блоках лечебного массажа устройства, полученные эффекты стимуляции и массажа более очевидны, чем те, которые достигаются в случае, когда пользователь наступает на неподвижный предмет, так как пользователю необходимо справиться с возмущающим воздействием устройства.
Устройство включает в себя кнопочный пульт дистанционного управления, и нажимная кнопка "ускорение" и нажимная кнопка "замедление" расположены по отдельности, чтобы выполнять точную пошаговую регулировку скорости перемещения устройства.
Что касается устройства, то блок основной платы управления дополнительно включает в себя модуль беспроводной связи, модуль беспроводной связи подключен к микропроцессору напрямую или через печатную плату, пользователь управляет пультом дистанционного управления для отправки команды запуска, команды остановки, команды ускорения и команды замедления, модуль беспроводной связи принимает сигнал команды из пульта дистанционного управления и пересылает сигнал команды в микропроцессор, и микропроцессор отправляет соответствующий сигнал в модуль приведения в действие двигателя для приведения в действие двигателя(ей).
В существующем электросамокате используется пульт дистанционного управления типа джойстика, ускорение и замедление движения осуществляется путем отталкивания и притягивания джойстика, и он обладает преимуществами, связанными с возможностью выполнения относительно быстрого ускорения и замедления движения и автоматического сброса при отпускании джойстика, так что специалисты в данной области техники не намерены и не мотивированы использовать вместо него кнопочный пульт дистанционного управления, который имеет недостатки, связанные с тем, что пользователю необходимо постоянно манипулировать джойстиком для поддержания работы, чтобы вызвать локальное устойчивое напряжение тела пользователя; и точная пошаговая регулировка скорости движения является затруднительной. В устройстве используется кнопочный пульт дистанционного управления, нажимная кнопка "ускорение" и нажимная кнопка "замедление" расположены по отдельности, чтобы выполнять точную пошаговую регулировку скорости перемещения устройства, поэтому пользователь может легко и свободно выбирать правильную скорость, а также облегчается обратная связь при измерении; и без постоянного манипулирования джойстиком выполнение упражнения и расслабление становятся более легкими.
Применительно к устройству блок основной платы управления включает в себя функциональный модуль возвратно-поступательного перемещения с постоянной скоростью, и/или функциональный модуль автоматического возвратно-поступательного перемещения с изменяющейся скоростью, и/или функциональный модуль со случайно изменяющейся скоростью, и/или функциональный модуль возвратно-поступательного перемещения со случайно изменяющимся расстоянием, и/или функциональный модуль возвратно-поступательного перемещения со случайно изменяющейся скоростью и случайно изменяющимся расстоянием и/или функциональный модуль с перекрестным сочетанием возвратно-поступательных перемещений.
Предпочтительно блок основной платы управления включает в себя функциональный модуль установки и регулировки максимальной скорости. Пользователь может в любой момент настроить максимальную скорость в соответствии с собственными предпочтениями.
Предпочтительно блок основной платы управления включает в себя функциональный модуль незамедлительного реверсирования. С помощью функционального модуля незамедлительного реверсирования пользователь может управлять устройством для незамедлительного выполнения реверсирования в процессе автоматического возвратно-поступательного перемещения, и микропроцессор выдает сигнал для управления устройством, чтобы незамедлительно перемещаться в направлении, обратном первоначальному направлению движения, после приема команды незамедлительного реверсирования.
Существующий электросамокат требует ручного вмешательства при изменении скорости, управления и т.п., пользователь может выполнить предварительную оценку перед изменением режима, чтобы гарантировать плавность хода и комфортность, и электросамокат не подходит для автоматического изменения скорости в том случае, когда пользователь не был подготовлен к тому, чтобы предотвратить свое падение и избежать травмы, поэтому специалисты в данной области техники не имеют намерения и мотивации для добавления функции автоматического изменения скорости, функции автоматического изменения расстояния и функции незамедлительного реверсирования.
При использовании режима автоматического изменения скорости, режима случайного изменения скорости, режима автоматического изменения расстояния, режима случайного изменения расстояния и сочетания этих режимов увеличивается, соответственно, неопределенность возмущающего воздействия, затрудняется предварительная оценка, и может быть улучшен эффект тренировки.
Из-за отклонений, вызванных реальными условиями эксплуатации, например, наклонной или неровной поверхности, отклонения между коэффициентом прямого и обратного трения, отклонения распределения центра тяжести устройства и центра тяжести пользователя и т.п., устройство может постепенно перемещаться в сторону в процессе автоматического возвратно-поступательного перемещения, функциональный модуль незамедлительного реверсирования может использоваться для коррекции отклонения и/или перемещения области использования в процессе работы, и устройство не нужно останавливать в процессе реверсирования и регулировки, чтобы можно было гарантировать непрерывность тренировок и повысить удобство использования.
Предпочтительно устройство включает в себя дисплейный блок, установленный на верхней поверхности несущего блока.
Предпочтительно дисплейный блок установлен в средней области верхней поверхности несущего блока.
Предпочтительно блок основной платы управления включает в себя функциональный модуль отображения скорости в реальном времени для отображения текущей рабочей скорости в реальном времени посредством блока отображения.
В существующем электросамокате дисплейный блок, как правило, не предусмотрен; и даже если он предусмотрен, используется несколько индикаторных ламп, которые отображают информацию, такую как переключение, питание и связь, не отображают информацию о скорости в реальном времени, не могут быть установлены на верхней поверхности несущего блока и даже не могут быть установлены в средней области верхней поверхности несущего блока. Пользователь должен наблюдать за окружающей средой, и у него нет времени внимательно смотреть на поверхность педали, так как она сориентирована в направлении движения, когда используется существующий электросамокат; даже если дисплейный блок добавлен, специалисты в данной области техники также стремятся спроектировать и установить дисплейный блок под педалью; несмотря на то, что дисплейный блок спроектирован и установлен над педалью, специалисты в данной области техники также стремятся спроектировать и установить дисплейный блок на переднем конце педали, чтобы пользователь мог найти время для наблюдения сверху вниз; и специалисты в данной области техники не намерены и не мотивированы спроектировать и установить дисплейный блок в средней области над педалью, так как в средней области пользователь должен поворачивать голову для наблюдения.
Устройство может выполнять автоматическое возвратно-поступательное перемещение в относительно небольшом пространстве, пользователь, как правило, смотрит в сторону в направлении, перпендикулярном направлению движения, дисплейный блок отображает текущую рабочую скорость в реальном времени, что является важной обратной связью для пользователя, и пользователь может легко отрегулировать подходящую скорость и ощутить эффект тренировки; и дисплейный блок установлен в средней области верхней поверхности несущего блока, поэтому пользователь может наблюдать текущую рабочую скорость, лишь слегка опуская голову. В состоянии остановки дисплейный блок может дополнительно отображать информацию, такую как оставшийся заряд аккумуляторной батареи.
Устройство включает в себя громкоговоритель, и блок основной платы управления включает в себя модуль воспроизведения аудио. Громкоговоритель подключен к модулю воспроизведения аудио, модуль воспроизведения аудио подключен к микропроцессору напрямую или через печатную плату, и микропроцессор выбирает и воспроизводит аудиофайл и/или регулирует громкость в соответствии с действующей командой пользователя.
Предпочтительно содержание, хранящееся в модуле воспроизведения аудио, включает в себя файлы фоновой музыки и/или файлы для чтения классических произведений и/или инструкций по выполнению физических упражнений.
Существующий электросамокат, как правило, не имеет громкоговорителя и модуля воспроизведения аудио, в некоторых из существующих электросамокатах используется зуммер для ограниченной оперативной подсказки, и громкоговоритель, как правило, требует отверстия для прохождения звука, что не способствует водонепроницаемости. Существующий электросамокат используется, как правило, на открытом воздухе, в сложной и шумной среде; при воспроизведении звука пользователь не может четко слышать звук, если громкость низкая, а при высокой громкости звук беспокоит людей; и требования по водонепроницаемости и устойчивости к сотрясениям ниже, чем к воспроизведению звука, так что специалисты в данной области техники не намерены и не мотивированы добавлять громкоговоритель и модуль воспроизведения аудио.
Устройство используется, как правило, в помещении и подходит для воспроизведения аудиосодержания. Когда пользователь выполняет упражнение, для проигрывания выбираются фоновая музыка для расслабления и интеллектуального развития, такая как музыка с альфа-волнами и легкая музыка, и/или инструкции по выполнению физических упражнений, и облегчается выполнение упражнений, расслабление и интеллектуальное развитие; и при воспроизведении классической статьи пользователь постоянно просвещается и неосознанно влияет на процессы упражнений и расслабления тела и разума и получает лучший обучающий эффект.
Предпочтительно блок основной платы управления включает в себя модуль голосовых подсказок, который автоматически воспроизводит соответствующие голосовые подсказки, когда пользователь управляет устройством, и/или когда возникают отклонения от нормального функционирования, и/или когда необходимо выполнять другие требования.
Пользовательская операция включает в себя, но не ограничивается этим, одно или более из следующего: запуск, ускорение, замедление, остановка, пауза, возобновление, незамедлительное реверсирование, увеличение расстояния возвратно-поступательного перемещения, уменьшение расстояния возвратно-поступательного перемещения, увеличение громкости, уменьшение громкости, переключение аудиофайлов и т.п. в некоторых режимах выполнения упражнений (возвратно-поступательного перемещения); возникающие отклонения от нормального функционирования включают в себя, но не ограничиваются этим, одно или более из следующего: заблокированный ротор, превышение скорости, низкая мощность, ошибки в работе и т.п.
Устройство включает в себя блоки предотвращения столкновений, установленные на двух концах по направлению движения.
Предпочтительно каждый блок предотвращения столкновений включает в себя расположенный в нем выключатель предотвращения столкновения, и переключатели предотвращения столкновения подключены к микропроцессору или блоку источника питания таким образом, чтобы устройство автоматически останавливалось при столкновении с посторонним предметом во время движения.
Предпочтительно чтобы толщины/площади двух концов в направлении движения несущего блока были явно больше, чем у существующего электросамоката.
В существующем электросамокате педаль является относительно легкой и тонкой из-за эксплуатационных требований, связанных с энергосбережением, подъемом в гору, выполнением трюков и т.п., и не обеспечивается предотвращение столкновений; и без переключателей предотвращения столкновений существующий электросамокат непригоден для автоматической незамедлительной остановки, чтобы предотвратить падение и травму пользователя, несмотря на столкновение с посторонним предметом во время движения, и поэтому специалисты в данной области техники не намерены и не мотивированы добавлять блоки предотвращения столкновений и переключатели для предотвращения столкновений или увеличивать площадь легко ударяемой части.
Электросамокат, не имеющий защиту от столкновений, очень легко причиняет вред другим людям и другим объектам, особенно очень легко причиняет вред детям и домашним животным, когда дети и домашние животные попадают под электросамокат из-за любопытства или несчастного случая при его использовании в небольшом пространстве внутри помещения. Устройство в основном используется внутри помещений, поэтому защита от столкновений должна быть усилена; и, кроме того, воздействие на устройство во время автоматического реверсирования возвратно-поступательного перемещения больше, чем при незамедлительной остановке, пользователь все время должен проявлять бдительность, чтобы предотвратить падение, и автоматическая незамедлительная остановка вызывает относительно небольшую угрозу для пользователя, поэтому устройство может иметь функции предотвращения столкновений и автоматической незамедлительной остановки.
Предпочтительно несущий блок выполнен в виде корпуса, который закрывает блок двигателя(ей) и моста, а также блок ведомого колеса (ведомых колес) и моста.
Предпочтительно относительно большая полость, очевидно, больше, чем такая же часть существующего электросамоката, выполнена под несущим блоком и используется для размещения блока источника питания, блока основной платы управления и громкоговорителя, и уплотнительная пластина установлена под полостью для защиты.
В существующем электросамокате педаль является относительно легкой и тонкой, и двигатель(и) и ведомое(ые) колесо(а), как правило, открыты снаружи; так как существующий электросамокат должен быть адаптирован к открытой дороге с выбоинами и ухабами, шасси должно иметь достаточную высоту над землей, во избежание соударения шасси с дорогой или препятствием, и специалисты в данной области техники не намерены и не мотивированы утолщать педаль, или закрывать мотор(ы) и ведомое(ые) колесо(а) или увеличивать объем блока управления.
Устройство используется, как правило, на ровной поверхности в помещении, нижняя сторона несущего блока в меньшей степени подвержена соударениям, высота над полом может быть явно меньше, чем у существующих электросамокатов, двигатели(и) и ведомое(ые) колесо(а) закрыты для защиты пользователя, других людей или других объектов от столкновений или соударений с двигателем(ями) и ведомым(и) колесом(ами), и относительно большая конструкция полости является полезной для размещения в ней большего количества функциональных модулей, увеличения громкости воспроизводимой речи и улучшения качества звучания воспроизводимой речи.
Блок основной платы управления включает в себя функциональный модуль двусторонней беспроводной связи, посредством которой команды и/или данные принимаются и отправляются в аналогичные универсальные интеллектуальные устройства, такие как смартфон или планшетный персональный компьютер.
Предпочтительно принимаемая и исполняемая команда и/или данные включают в себя, но не ограничиваются этим, одну или несколько из вышеупомянутой команды пульта дистанционного управления, команды установки параметров, команды запроса параметра, команды запроса состояния и команды считывания рабочих данных.
Предпочтительно отправляемые данные включают в себя, но не ограничиваются этим, одно или несколько из: данных о текущей мощности, данных о текущей громкости, данных о текущем режиме упражнений, данных о текущей скорости, данных о продолжительности текущего режима упражнения и статистических данных о работе.
Существующий электросамокат может принимать из пульта дистанционного управления, как правило, только очень небольшое количество команд, таких как управление скоростью, и не может отправлять данные в пульт дистанционного управления или другие устройства. Устройство может использовать аналогичные операции пульта дистанционного управления с функицей беспроводной связи, например, инфракрасный порт, Bluetooth, 2.4G и Wi-Fi, может также использовать удаленные операции универсальных интеллектуальных устройств и может дополнительно ограничиваться использованием только удаленных операций универсальных интеллектуальных устройств.
Блок основной панели управления включает в себя функциональный модуль таймирования упражнений для автоматического вычисления каждый раз продолжительности упражнения.
Предпочтительно блок основной панели управления включает в себя функциональный модуль сообщения времени упражнения для автоматического вычисления текущей продолжительности упражнения и автоматически выдает звуковую подсказку и/или воспроизводит голосовую подсказку, когда текущая продолжительность упражнения достигает установленного числового значения.
Предпочтительно блок основной платы управления включает в себя функциональный модуль паузы/возобновления, с помощью которого устройство приостанавливает перемещение и таймирование после приема от пользователя команды "пауза" во время текущего упражнения, возобновляет движение в соответствии с параметрами и режимами перед паузой и возобновляет выполнение таймирования на основе продолжительности перед паузой после приема от пользователя команды "возобновить", когда устройство находится в состоянии паузы.
Предпочтительно блок основной панели управления включает в себя функциональный модуль вывода записи упражнений для автоматического вывода данных записи упражнений, и элементы данных включают в себя, но не ограничиваются этим, одно или более из: идентификации устройства, режима упражнений, времени начала, времени окончания, продолжительности, скорости работы и т.п.
Предпочтительно блок основной платы управления включает в себя то, что запись упражнения выводится в модуль беспроводной связи, пересылается модулем беспроводной связи в аналогичные универсальные интеллектуальные устройства, такие как смартфон и/или планшетный персональный компьютер, и затем передается универсальными интеллектуальными устройствами на сервер/в облачную систему для хранения с целью последующего статистического анализа, и/или совместного использования в социальных сетях и/или расчетов по счету с использованием карты.
Существующий электросамокат не имеет функций таймирования упражнений, определения времени и вывода записей и является относительно трудным для получения четкой статистики во время фактического использования, и справочная значимость статистического результата является относительно маленькой, так что специалисты в данной области не намерены и не мотивированы добавлять функции. Когда устройство используется для выполнения упражнений, у пользователя, как правило, есть план упражнений, и он надеется своевременно узнать, сколько времени прошло, а также сохранить и поделиться записью упражнения.
Блок основной платы управления включает в себя функциональный модуль контроля вращения двигателя для приема сигналов вращения двигателя и выполнения статистического анализа сигналов вращения двигателя в реальном времени.
Предпочтительно блок основной платы управления включает в себя функциональный модуль автоматической парковки, с помощью которого устройство автоматически осуществляет торможение тогда, когда устройство не находится в запущенном состоянии, автоматически отпускает тормоз при запуске и автоматически осуществляет торможение при остановке.
Предпочтительно функциональный модуль автоматической парковки включает в себя расположенный в нем подмодуль интеллектуальной оценки, с помощью которого устройство автоматически осуществляет торможение тогда, когда функциональный модуль автоматической парковки принимает сигналы вращения двигателя, хотя устройство не находится в запущенном состоянии, и автоматически отпускает тормоз, если продолжительность торможения достигает заданного значения, поэтому экономится электроэнергия, и снижается электропотребление.
Предпочтительно блок основной платы управления включает в себя функциональный модуль автоматической остановки, с помощью которого устройство автоматически прекращает движение, если вычисленная скорость вращения двигателя превышает заданный порог, и/или если вычисленная скорость вращения двигателя ниже установленного порогового значения тогда, когда устройство находится в запущенном состоянии.
Предпочтительно блок основной платы управления включает в себя функциональный модуль защиты от запуска, с помощью которого сигналы вращения двигателя непрерывно передаются тогда, когда устройство не находится в запущенном состоянии, и запуск устройства автоматически предотвращается в том случае, если скорость вращения двигателя в установленном временном промежутке превышает заданный порог тогда, когда устройство принимает команду запуска.
Существующий электросамокат не имеет функций контроля скорости вращения двигателя, автоматической парковки, автоматической остановки и защиты от запуска и не подключен к сигнальной линии контроля скорости вращения двигателя, и эксплуатационные требования к этим функциям являются относительно низкими, так что специалисты в данной области не намерены и не мотивированы добавлять эти функции.
Устройство контролирует сигналы вращения двигателя и выполняет статистический анализ сигналов вращения двигателя в реальном времени, может использоваться для анализа и оценки состояния вращения двигателя и вычисления скорости движения и расстояния перемещения и может принимать решение относительно возможности реверсирования путем вычисления расстояния перемещения. Чтобы улучшить эффект выполнения упражнений, соединение двигателя, ведомого колеса (ведомых колес) и моста устройства должно быть относительно гибким, и пользователь может устойчиво стоять или сидеть на устройстве, для чего требуются только определенные способности и навыки сохранения равновесия, иначе устройство легко раскачивается или соскальзывает в сторону. Автоматическая парковка помогает пользователю (в частности, новичку) плавно и безопасно встать на устройство; автоматическая остановка может снизить риски, вызванные отклонениями от нормального функционирования, такими как превышение скорости, резкое повышение скорости, быстрое вращение ротора, блокировка ротора и отклонения от ненормального режима работы; и отказ от запуска гарантирует, что устройство может быть запущено только после того, как пользователь устойчиво встанет или сядет на устройство, и, таким образом, повышается безопасность использования.
Блок основной платы управления включает в себя модуль управления полномочиями, используемый для проверки пароля перед запуском, и/или установки параметров, и/или вывода данных и отказа от запуска, установки параметров и/или вывода данных, если пароль не является правильным.
Предпочтительно блок основной платы управления включает в себя функциональный модуль ограниченного времени использования, используемый для предварительной установки ограниченного времени использования или установки ограниченного времени использования для устройства с помощью интеллектуального устройства по мере необходимости, и с помощью функционального модуля ограниченного времени использования устройство автоматически останавливается и/или отказывается запускаться, если превышено ограниченное время использования.
Предпочтительно блок основной платы управления включает в себя аналогичные идентификационные коды, такие как буквенный код, или штрих-код, или двумерный код, и пользователь считывает или вводит идентификационные коды через интеллектуальные устройства, чтобы установить коммуникационное соединение с устройством для использования и/или аренды устройства.
Устройство включает в себя блок измерения мозговых волн; блок измерения мозговых волн автоматически осуществляет сбор данных о мозговых волнах пользователя и отправляет данные о мозговых волнах в микропроцессор с помощью модуля беспроводной связи, и микропроцессор автоматически регулирует скорость перемещения устройства в соответствии с принятыми данными о мозговых волнах пользователя.
Сбор одних или более индексных данных, включающих в себя, но не ограниченных этим, степень расслабления, степень концентрации и содержание альфа-волн в мозговых волнах пользователя, осуществляется в реальном времени для сравнения с целевым значением тренировки, и устройство автоматически выполняет ускорение, если собранные данные об индексе больше целевого значения тренировки, и автоматически выполняет замедление, если собранные данные об индексе меньше целевого значения тренировки, поэтому пользователь постепенно приближается и поддерживает оптимальное состояние, а также улучшается бодибилдинг, и достигаются эффекты выполнения упражнений.
В предшествующем уровне техники существует обучающее и развлекательное устройство, использующее управление с обратной связью по мозговым волнам, например, односторонним движением игрушечной машины, маленьким мячом и т.п. управляют в соответствии со степенью концентрации, и такое устройство используется, как правило, пользователем в неподвижном состоянии, что не очень полезно для физических упражнений.
Научные исследования показывают, что людям необходимо поддерживать хорошее физическое и психическое состояние, и они нуждаются в обычных движениях, но не могут чрезмерно тренироваться, так как необдуманные и экстремальные движения одинаково вредны. Однако субъективно человеку сложно определить правильную интенсивность упражнений; и когда устройство используется для тренировки, пользователь может отвлечь свое внимание и почувствовать утомление, если скорость перемещения устройства слишком низкая, и может почувствовать себя слишком напряженным, если скорость перемещения является слишком высокой, и оба условия могут влиять на эффект тренировки. Устройство автоматически регулирует скорость перемещения посредством обратной связи по мозговым волнам, а также является более объективным, интуитивно понятным, удобным и эффективным.
Благоприятные эффекты от физических упражнений настоящего изобретения представлены следующим образом:
Выполнены устройство для физических упражнений, а также способ его использования и способ управления им, и существующая технология электросамокатов переходит в области применения, связанные с физическими упражнениями, обучением и образованием после усовершенствования и инноваций; при попытке избежать использования технического персонала за счет технических характеристик достигаются неожиданные эффекты технических упражнений, и достигается новое предназначение электросамоката; и устройство для физических упражнений является полезным для улучшения способностей пользователя, связанных с сохранением его равновесия, координации, расслабления, гибкости, концентрации и непредвиденными ситуациями, поэтому достигается более удобный, непринужденный и действенный эффект обучения и выполнения упражнений.
Устройство имеет небольшие размеры, малый вес и низкие требования к среде эксплуатации, может использоваться во всех небольших внутренних помещениях и позволяет значительно повысить удобство, экономичность и практичность.
Краткое описание чертежей
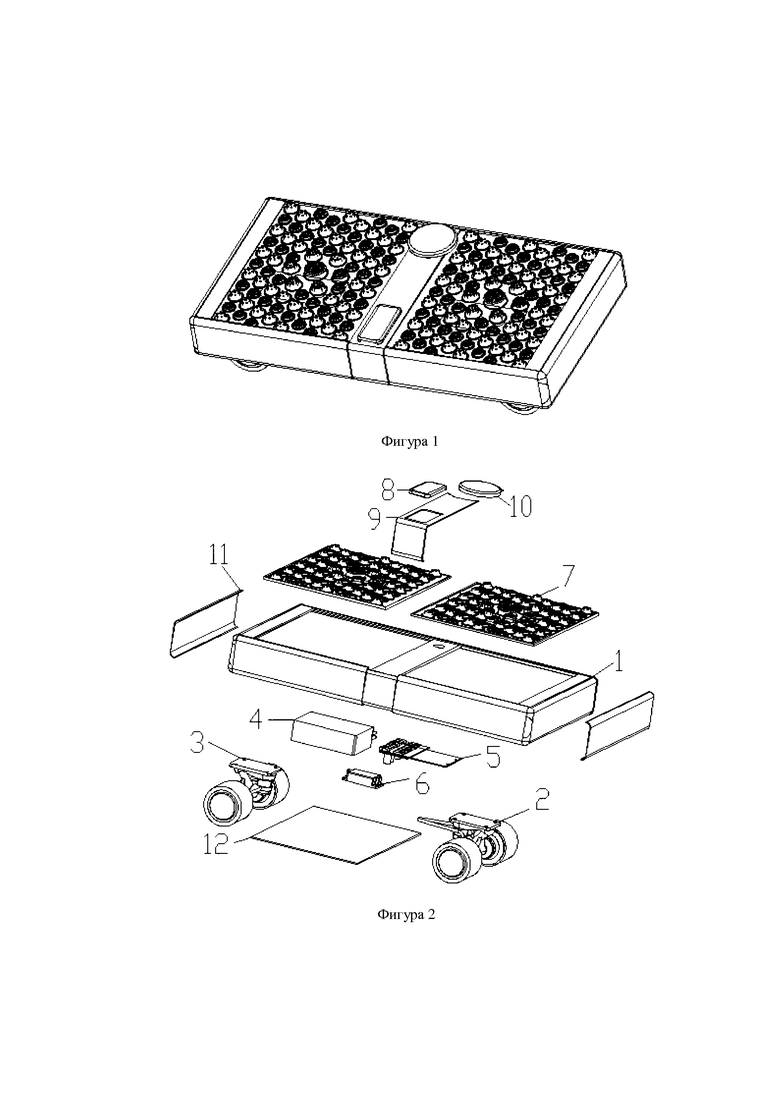
На фиг. 1 показан схематичный вид устройства согласно вариантам осуществления настоящего изобретения.
На фиг. 2 показан схематичный вид конструкции согласно вариантам осуществления настоящего изобретения.
Подробное описание изобретения
На фиг. 1 показан схематичный вид устройства согласно вариантам осуществления настоящего изобретения, и на фиг. 2 показан схематичный вид конструкции согласно вариантам осуществления настоящего изобретения.
Вариант осуществления включает в себя несущий блок 1, блок 2 двигателя(ей) и моста, блок 3 ведомого колеса (ведомых колес) и моста, блок 4 источника питания, блок 5 основной платы управления, и громкоговоритель 6, блоки 7 лечебного массажа, пульт 8 дистанционного управления, кронштейн 9 для пульта дистанционного управления, дисплейный блок 10, блоки 11 предотвращения столкновений, уплотнительную пластину 12, идентификационные коды и т.п.
Размер, форма и материал несущего блока могут иметь множество вариантов; для простоты описания в варианте осуществления выбран бамбук, который должен быть изготовлен в виде корпуса длиной 59 см, шириной 31 см и высотой 7 см, при этом после установки несущий блок может закрывать блок двигателя(ей) и моста и блок ведомого колеса (ведомых колес) и моста; и под несущим блоком образована с помощью перегородки полость длиной 20 см, шириной 29 см и высотой 4 см, которая используется для размещения в ней блока источника питания, блока основной платы управления, динамика и т.п., и уплотнительная пластина установлена под полостью.
Два ступичных двигателя с рабочим напряжением 24 В, мощностью 120 Вт и диаметром 72 мм, а также стандартный мост и запасные части, соответствующие ступичным двигателям, выбраны для выполнения блока двигателя(ей) и ступицы моста, которые описаны в варианте осуществления.
Два PU-колеса диаметром 72 мм, а также стандартный мост и запасные части, соответствующие блоку 2 двигателя(ей) и моста, выбраны для выполнения блока ведомого колеса (ведомых колес) и моста 3, описанного в варианте осуществления.
Для формирования блока 4 источника питания выбраны блок питания на основе литиевых батарей с номинальным напряжением 24 В и емкостью 4 А·ч, выключатель питания и зарядное устройство.
Универсальный динамик выбран в качестве громкоговорителя 6.
В качестве блоков 7 лечебного массажа выбраны два универсальных акупрессурных листа размером 25*30 см, блоки 7 лечебного массажа установлены над несущим блоком 1 и могут быть также выполнены как единое целое на верхней поверхности несущего блока 1 посредством гравировки, литья и аналогичным образом.
В качестве кнопочного пульта 8 дистанционного управления могут быть выбраны аналогичные беспроводные пульты дистанционного управления, такие как инфракрасный порт, Bluetooth, 2.4G и Wi-Fi, и в варианте осуществления выбран универсальный малый инфракрасный пульт дистанционного управления 38K.
Материалы, такие как бамбук или акриловые материалы, используются для изготовления кронштейна для пульта дистанционного управления.
Компоненты, такие как цифровые трубки, светодиодная полоса и экран дисплея, выполнены в виде дисплейного блока 10, и в варианте осуществления выбран 16-битовый полноцветный кольцевой модуль RGB со светодиодной RGB-подсветкой WS2812 5050 RGB, защитной крышкой и т.п., чтобы выполнить его в виде дисплейного блока 10.
Универсальные буферные подушки можно выбрать таким образом, чтобы они были выполнены в виде блоков 11 предотвращения столкновений, причем каждый блок 11 предотвращения столкновений содержит переключатель предотвращения столкновений (например, реечный переключатель), прикрепленный к двум концам несущего блока 1, при этом несущий блок 1 согласно варианту осуществления уже имеет определенный эффект предотвращения столкновения, так как области двух концов несущего блока являются относительно большими, и блоки 11 предотвращения столкновения можно также исключить.
Буквенный код, штрих-код, двумерный код и т.п. можно использовать для создания идентификационных кодов, и в варианте осуществления выбраны двумерные коды прикладных мини-программ, общедоступных учетных записей и т.п., таких как Wechat или Alipay, чтобы наклеить или распечатать двумерные коды на поверхности устройства.
Блок 2 двигателя(ей) и моста, блок 3 ведомого колеса (ведомых колес) и моста, блок 4 источника питания и блок 5 основной платы управления установлены под несущим блоком 1. Высоту каждого массажного блока 7 над землей необходимо контролировать в относительно безопасном диапазоне. Вариант осуществления имеет приблизительные базовые размеры с длиной 59 см, шириной 31 см и высотой 13 см и подходит для использования в помещении.
Блок 5 основной платы управления включает в себя монтажную плату, микропроцессор, модуль приведения в действие двигателя, модуль воспроизведения аудио, модуль беспроводной связи и традиционные компоненты, такие как понижающие трансформаторы, диоды, конденсаторы, резисторы, розеткки, штыри и коммутационные шнуры, хорошо известные специалистам в данной области техники.
Аналогичные универсальные устройства, такие как микрокомпьютер с одной микросхемой или компьютер с одной платой, могут быть выбраны в качестве микропроцессора, например, Arduino, STM32, C51, Raspberry Pi или т.п., содержат больше стандартных портов ввода/вывода и могут загружать программные файлы; и в варианте осуществления выбраны компьютер с платой Arduino в качестве микропроцессора, и в микропроцессор загружаются файлы с программами обработки и управления согласно варианту осуществления.
На рынке доступны различные универсальные модули приведения в действие двигателя, и в варианте осуществления в качестве модуля приведения в действие двигателя выбрана плата управления двухприводным и бесщеточным ступичным двигателем на эффекте Холла постоянного тока с жестким реверсированием и большой мощностью, рабочее напряжение которого составляет 12-36 В.
На рынке доступны различные универсальные модули воспроизведения аудио, и в варианте осуществления выбран универсальный проигрыватель Micro MP3 и карта памяти MicroSD, которую можно подключить к универсальному проигрывателю Micro MP3 для выполнения модуля воспроизведения аудио.
Модуль беспроводной связи можно выбрать таким образом, чтобы он соответствовал аналогичным дистанционным пультам управления с беспроводной связью, таким как инфракрасный порт, Bluetooth, 2.4G и Wi-Fi, и в варианте осуществления выбрана инфракрасная приемная головка, соответствующая универсальному небольшому инфракрасному пульту дистанционного управления 38K для односторонней беспроводной связи и универсальный модуль Bluetooth для двусторонней беспроводной связи.
Блок 4 источника питания подключен к печатной плате и модулю приведения в действие двигателя, выходные порты фазных проводов модуля приведения в действие двигателя последовательно соединены с входными портами фазных проводов двигателя, провода на эффекте Холла последовательно соединены с проводами на эффекте Холла двигателя (существующий электросамокат, как правило, не требуется подключать к проводам на эффекте Холла, и в варианте осуществления предусмотрено подключение к проводам на эффекте Холла для контроля сигналов вращения двигателя), микропроцессор, модуль приведения в действие двигателя, модуль воспроизведения аудио, модуль беспроводной связи, громкоговоритель и переключатели предотвращения столкновений подключены к печатной плате, микропроцессор соединен по отдельности с модулем приведения в действие двигателя, модулем воспроизведения аудио, модулем беспроводной связи и переключателями предотвращения столкновений с помощью монтажной платы, и модуль воспроизведения аудио подключен к громкоговорителю через монтажную плату или напрямую.
Вариант осуществления предусматривает установку различных режимов упражнений, например, возвратно-поступательное перемещение с постоянной скоростью, возвратно-поступательное перемещение с произвольной скоростью, а также возвратно-поступательное перемещение со случайно изменяющейся скоростью и случайно изменяющимся расстоянием. Каждому режиму выполнения упражнения соответствует одна нажимная кнопка на пульте дистанционного управления, и команда запуска соответствующего режима упражнений отправляется при нажатии одной нажимной кнопки.
Нажимные кнопки для ускорения, замедления, остановки, паузы, возобновления, незамедлительного реверсирования, увеличения расстояния возвратно-поступательного перемещения, сокращения расстояния возвратно-поступательного перемещения, увеличения громкости, уменьшения громкости, смены аудиофайла и т.п. дополнительно расположены по отдельности на пульте дистанционного управления.
Файлы голосовых подсказок, соответствующие различным нажимным кнопкам, записаны с использованием универсального средства аудиозаписи или синтезированы с использованием универсального средства синтеза речи, другие файлы голосовых подсказок дополнительно включают в себя инструкцию по применению, предупреждение об опасности, предупреждение о ненормальном режиме работы и "говорящую" подсказку времени (например, "пять минут", "десять минут" и т.п.), и файлы голосовых подсказок заранее сохраняются на карте памяти MicroSD в модуле воспроизведения аудио.
Предпочтительно предлагается, что пользователь, и/или родственники и учителя используют универсальное средство аудиозаписи для записи основного правила упражнения, классических статей и т.п., записанные голосовые записи хранятся на карте памяти MicroSD в модуле воспроизведения аудио, и модуль воспроизведения аудио устройства сопровождает воспроизведение соответствующей записи, когда пользователь выполняет упражнение.
Способ использования устройства заключается в следующем: пользователь стоит или сидит на устройстве, смотрит в одну сторону в направлении, перпендикулярном направлению перемещения устройства, и своевременно регулирует центр тяжести тела во время возвратно-поступательного перемещения устройства, чтобы предотвратить падение, и, таким образом, достигается эффект тренировки.
Устройство включается, переходит в состояние готовности после инициирования и самопроверки и синхронно или поочередно выполняет операции:
1. Отображаются информация о мощности и/или эффект анимации приветствия и т.п.
2. запускается модуль голосовых подсказок: поочередно воспроизводятся реклама изделия, подсказка безопасности и подсказка операции, и поочередно воспроизводятся файлы фоновой музыки и/или файлы для чтения классических произведений и/или инструкций по выполнению физических упражнений и т.п.
3. Запускаются функциональный модуль контроля вращения двигателя, функциональный модуль автоматической парковки, функциональный модуль защиты от запуска и модуль защиты от столкновений:
(1) функциональный модуль контроля скорости вращения двигателя: для контроля сигналов вращения двигателя и выполнения статистического анализа сигналов вращения двигателя в реальном времени, изменения сигналов Холла возникают при вращении двигателя, модуль приведения в действие двигателя вырабатывает импульс вращения путем обработки изменений сигналов Холла двигателя, которые будут выводиться на порт (M) импульсных сигналов, и микропроцессор контролирует порт входных сигналов, соединенный с портом (M) импульсных сигналов модуля приведения в действие двигателя, чтобы выполнить статистический анализ количества раз изменений сигналов;
(2) функциональный модуль автоматической парковки: с помощью которого устройство автоматически осуществляет торможение тогда, когда устройство не находится в запущенном состоянии, автоматически отпускает тормоз при запуске и автоматически осуществляет торможение при остановке, и устройство тормозит или отпускает тормоз посредством микропроцессора путем установки выходного порта, соединенного с портом (EL) тормоза модуля приведения в действие двигателя, на различные числовые значения; и функциональный модуль автоматической парковки включает в себя расположенный внутри него подмодуль интеллектуальной оценки, с помощью которого устройство автоматически осуществляет торможение тогда, когда подмодуль интеллектуальной оценки принимает сигналы вращения двигателя, хотя устройство не находится в запущенном состоянии, и автоматически отпускает тормоз, если продолжительность торможения достигает установленного значения;
(3) функциональный модуль защиты от запуска: с помощью которого непрерывно контролируются сигналы вращения двигателя, когда устройство не находится в запущенном состоянии, и автоматически предотвращается запуск устройства, если скорость вращения двигателя в установленном временном промежутке превышает заданный порог при получении команды запуска; и
(4) модуль защиты от столкновений: который контролирует сигнал переключателя предотвращения столкновений и незамедлительно отправляет сигнал управления при внезапной остановке в модуль приведения в действие двигателя после приема сигнала переключения; если микропроцессор не используется для реализации функции экстренного останова из-за столкновения, сигнальная линия переключателя предотвращения столкновения также может быть подключена к блоку источника питания, и источник питания отключается непосредственно при обнаружении столкновения.
4. контролируется команда, принятая модулем беспроводной связи; и данные о состоянии выводятся с помощью модуля беспроводной связи через заданные интервалы времени и/или при необходимости.
Когда контролируется команда, принятая модулем беспроводной связи, анализируется соответствующая команда, и вызывается модуль управления полномочиями; пароль подтверждается перед запуском, и/или установка параметров и/или вывод данных, запуск, установка параметров и/или вывод данных не выполняются в том случае, если пароль является неправильным, и соответствующий файл голосовой подсказки проигрывается в соответствии с настройками; и
В качестве альтернативы, пользователь сканирует двумерный код с помощью приложения или прикладных мини-программ, установленных на универсальных интеллектуальных устройствах, таких как смартфон или планшетный персональный компьютер, проверяет полномочия на использование и/или дату истечения срока использования, если средств на счете недостаточно, принимают к исполнению онлайн тарификацию пользователя, и пользователь устанавливает коммуникационное соединение с устройством, когда проверка прошла успешно.
При прохождении проверки полномочий выполняются соответствующие команды, и следующие типы команд в основном включают в себя:
1. Команды настройки параметров включают в себя: увеличение громкости, уменьшение громкости, настройку громкости, смену аудиофайла, настройку пароля доступа, настройку ограничения времени использования, настройку ограничения скорости и т.п., при этом соответствующие параметры устанавливаются в соответствии с содержанием команды, соответствующие файлы звуковых или голосовых подсказок воспроизводятся в соответствии с предварительными настройками, и исполнение выполняется в соответствии с соответствующими параметрами.
2. Команды запроса данных включают в себя: запрос параметра устройства, запрос рабочего состояния, запрос записи упражнения, запрос статистического отчета и т.п., при этом поиск и статистический анализ выполняются для соответствующих данных в соответствии с содержанием команд, соответствующие данные упаковываются в пакет данных в заданном формате, и пакет данных выводится с помощью модуля беспроводной связи.
3. Команды запуска режима упражнений: с помощью которых вызывается функциональный модуль ограниченного времени использования, чтобы определить, превышен ли предел времени использования в соответствии с заданным значением; устройство отказывается запускаться и/или автоматически останавливается, если превышено ограничение по времени использования, и соответствующий файл голосовых подсказок воспроизводится согласно предварительной настройке; если не превышен предел времени использования, вызывается функциональный модуль защиты от запуска; и если функциональный модуль защиты от запуска не отказывает в вызове, соответствующий файл голосовой подсказки воспроизводится согласно предварительной настройке, запускается соответствующий режим упражнений, и подробное описание этого приведено в последующих разделах.
4. Команды регулировки действий: ускорение, замедление, добавление расстояния возвратно-поступательного перемещения, уменьшение расстояния возвратно-поступательного перемещения, пауза, возобновление, незамедлительное реверсирование, остановка и т.п. выполняются, соответственно, согласно различным текущим режимам и состояниям, подробное описание приведено в последующих разделах.
Запускается соответствующий режим упражнений:
1. Инициируются статистические данные о текущем режиме упражнения; и постоянно вызывается функциональный модуль контроля вращения двигателя для контроля данных о скорости вращения двигателя и выполнения статистического анализа данных о скорости вращения двигателя в реальном времени.
2. Микропроцессор устанавливает выходной порт, соединенный с портом регулирования скорости (VR) модуля приведения в действие двигателя, в соответствующее числовое значение для запуска двигателя(ей) или регулирования скорости.
3. Вызывается функциональный модуль вывода записи упражнений: данные о начале текущего режима упражнения выводятся в модуль беспроводной связи, элементы данных включают в себя, но не ограничиваются этим, одно или более из: идентификации устройства, режима упражнений, времени начала, времени окончания, продолжительности, скорости работы и т.п., данные пересылаются модулем беспроводной связи в аналогичные универсальные интеллектуальные устройства, такие как смартфон и/или планшетный персональный компьютер, и затем пересылаются универсальными интеллектуальными устройствами на сервер/в облачную систему с целью последующего статистического анализа, и/или совместного использования в социальных сетях и/или расчетов по счету с использованием карты.
4. Запускается функциональный модуль таймирования упражнений: обнуляется текущая продолжительность упражнения, после чего следует автоматическое приращение времени до тех пор, пока не будет остановлен текущий режим упражнений, причем приращение приостанавливается, когда устройство переходит в состояние паузы.
5. Запускается функциональный модуль сообщения времени упражнения: когда текущая продолжительность упражнения достигает заданного параметра (например, 5 минут, 10 минут и т.д.), автоматически воспроизводится соответствующий файл звуковой или голосовой подсказки.
6. Запускается функциональный модуль автоматической остановки: когда вычисленная скорость вращения двигателя превышает заданный верхний порог, и/или когда вычисленная скорость вращения двигателя меньше заданного нижнего порога в запущенном состоянии, устройство автоматически прекращает движение.
7. Выполняется непрерывный контроль, и исполняется команда, принятая модулем беспроводной связи, соответственно; запускается функциональный модуль паузы/возобновления: при получении команды "пауза" сохраняются текущие рабочие параметры, и скорость устанавливается равной 0, чтобы дать возможность устройству приостановить перемещение и таймирование; и при получении команды "возобновить", когда устройство находится в состоянии паузы, возобновляется действие рабочих параметров, сохраненных во время паузы, возобновляется движение в соответствии с параметрами и режимом до паузы, и возобновляется таймирование на основе продолжительности упражнения перед паузой.
8. Запускается функциональный модуль автоматического реверсирования: направление вращения двигателя(ей) переключается на обратное через заданные интервалы расстояния и/или времени, чтобы привести в действие устройство для выполнения автоматического возвратно-поступательного перемещения. Например, микропроцессор выполняет сравнение рабочих расстояний за одно перемещение и/или выполняет сравнение временных интервалов в соответствии с заданными параметрами и отправляет сигналы реверсирования в модуль приведения в действие двигателя через заданные интервалы расстояния и/или времени. Ниже приведен подробный пример способа управления автоматическим реверсированием:
S0: предварительно устанавливается максимально допустимое количество A импульсов измерения скорости возвратно-поступательного перемещения;
S1: ожидается команда запуска, после приема команды запуска операция переходит к этапу S2, в противном случае продолжается этап S1;
S2: счетчик импульсов измерения скорости инициируется с переменной a=0, начинается обработка прерывания импульса измерения скорости, значение напряжения регулирования скорости вращения порта регулирования скорости вращения устанавливается для запуска двигателя, и операция переходит к S3.1 и S4 одновременно;
S3.1: когда приняты сигналы прерывания импульса измерения скорости, устанавливается переменная a=a+1, и числовой размер переменной a сравнивается с размером A; и если переменная a больше или равна A, операция переходит к этапу S3.2, в противном случае продолжается S3.1;
S3.2: значение, установленное микропроцессором, порта цифрового вывода, соединенного с портом положительного/отрицательного управления (Z/F) модуля приведения в действие двигателя, меняется на противоположное, чтобы позволить устройству двигаться в направлении, обратном текущему направлению движения, и значение переменной a сбрасывается в 0, и затем операция возвращается к этапу S3.1;
S4: контролируется сигнал остановки, операция переходит к этапу S5, если принят сигнал остановки, в противном случае продолжается этап S4;
S5: значение напряжения регулирования скорости вращения порта регулирования скорости вращения устанавливается равным 0, чтобы остановить движение устройства, переменная обнуляется, и затем операция возвращается к S1, при этом размер расстояния возвратно-поступательного перемещения может быть предпочтительно выбран в сочетании с характеристиками повышения скорости двигателя, эффекта восприятия пользователем и размера используемого пространства, например, расстояние возвратно-поступательного перемещения ограничено в пределах 2 м, если устройство используется семьей в помещении, и размер расстояния возвратно-поступательного перемещения может быть спроектирован в виде самоопределяемого параметра и устанавливается и регулируется пользователем по мере необходимости.
Рабочее расстояние может быть преобразовано в соответствии с совокупным количеством импульсов измерения скорости, например, для ступичного двигателя диаметром 72 см и с 10 парами полюсов и 3 фазами расстояние продвижения, обеспечиваемое каждым импульсом, составляет 72*3,14/(10*3) мм; и количество импульсов за один проход = желаемое расстояние одиночного возвратно-поступательного перемещения/расстояние продвижения вперед, которое обеспечивается каждым импульсом.
Функция автоматического реверсирования может быть реализована с помощью программного модуля, а также других способов, включая использование цифровой схемы или модуля цифровой интегральной схемы: например, триггер D (перекидной переключатель) и счетчик заданного числа импульсов с функцией отключения питания памяти выбирается для приваривания к печатной плате или при вставке соединения с ней, счетчик предварительно устанавливается на максимально допустимое число A импульсов измерения скорости для однократного возвратно-поступательного перемещения, входной порт счетчика соединяется с портом импульсного сигнала измерения скорости модуля приведения в действие двигателя, порт вывода счетчика соединяется с входным портом триггера D, и выходной порт триггера D соединяется с портом положительного/отрицательного сигнала управления модуля приведения в действие двигателя.
В варианте осуществления используется жесткое реверсирование: модуль приведения в действие двигателя существующего электросамоката не соответствует требованию жесткого реверсирования, микросхема привода в модуле приведения в действие двигателя, выбранная вариантом осуществления, использует микросхему жесткого реверсирования, и устройство незамедлительно перемещается в обратном направлении после приема сигнала реверсирования без ожидания остановки устройства (остановки вращения двигателя (двигателей)).
В варианте осуществления используется непрерывное автоматическое возвратно-поступательное перемещение: устройство автоматически продолжает повторять процесс возвратно-поступательного перемещения до тех пор, пока не будет принята команда "стоп" или команда "пауза" или не будет достигнуто условие автоматической остановки.
9. Запускается функциональный модуль незамедлительного реверсирования: функциональный модуль незамедлительного реверсирования выдает сигнал для управления устройством, чтобы незамедлительно выполнить реверсирование для движения в обратном направлении после приема команды "незамедлительное реверсирование".
10. Управление скоростью и расстоянием возвратно-поступательного перемещения в различных режимах упражнений представлено следующим образом:
(1) возвратно-поступательное перемещение с постоянной скоростью: устройство запускается с начальной скоростью и начальным расстоянием возвратно-поступательного перемещения; 1 уровень скорости увеличивается/уменьшается, соответственно, при приеме команды "ускорение"/команды "замедление"; и 1 передача расстояния возвратно-поступательного перемещения добавляется/сокращается, соответственно, после приема команды "увеличение расстояния"/команды "уменьшение расстояния".
(2) возвратно-поступательное перемещение со случайно изменяющейся скоростью: устройство запускается с начальной скоростью и начальным расстоянием возвратно-поступательного перемещения; значения выбираются автоматически случайным образом в диапазоне от верхнего порога до нижнего порога скорости через заданные интервалы расстояния (через заданное количество импульсов) или времени для преобразования скорости; 1 уровень верхнего порога скорости увеличивается/уменьшается, соответственно, после приема команды "ускорение"/"замедление"; и 1 передача возвратно-поступательного перемещения добавляется/сокращается, соответственно, после приема команды "увеличение расстояния"/команды "уменьшение расстояния".
(3) возвратно-поступательное перемещение со случайным изменением скорости и случайным изменением расстояния возвратно-поступательного перемещения: устройство запускается с начальной скоростью и начальным расстоянием возвратно-поступательного перемещения; значения выбираются автоматически случайным образом в диапазоне от верхнего порога до нижнего порога скорости через заданные интервалы расстояния (через заданное количество импульсов) или времени для преобразования скорости; 1 уровень верхнего порога скорости увеличивается/уменьшается, соответственно, после приема команды "ускорение"/команды "замедление"; значения автоматически выбираются случайным образом в диапазоне от верхнего порога до нижнего порога расстояния возвратно-поступательного перемещения для преобразования расстояния возвратно-поступательного перемещения; и 1 передача верхнего порога расстояния возвратно-поступательного перемещения добавляется/сокращается, соответственно, после приема команды "увеличение расстояния"/команды "уменьшение расстояния".
(4) возвратно-поступательное перемещение с управлением с обратной связью на основе мозговых волн: предварительно устанавливается тренировочное целевое значение g на основе мозговых волн; устройство запускается с начальной скоростью и начальным расстоянием возвратно-поступательного перемещения; данные i о мозговых волнах пользователя, собранные блоком измерения мозговых волн, контролируются, принимаются и сравниваются с целевым значением g, 1 уровень скорости автоматически увеличивается, если i больше g, и 1 уровень скорости автоматически уменьшается, если i меньше g; данные о мозговых волнах могут представлять собой одну или несколько комбинаций показателей, таких как степень расслабления, степень концентрации и содержание альфа-волны пользователя; и предпочтительно, учитывая флуктуации данных о мозговых волнах, скорость может изменяться только при выполнении условий после многократного сравнения во избежание возникновения тряски с частым изменением скорости.
Блок измерения мозговых волн согласно варианту осуществления может выбирать модуль TGAM для измерения мозговых волн, поддерживающий связь Bluetooth, и модуль TGAM может осуществлять сбор индексов и предоставлять их, например, начальное значение волны, мощность ЭЭГ в диапазонах дельта (0,5-2,75 Гц), тета (3,5-6,75 Гц), низких значений альфа (7,5-9,25 Гц), альфа (10-11,75 Гц), низких значений бета (13-16,75 Гц), высоких значений бета (18-29,75 Гц), низких значений гамма (31-39,75 Гц), средних значений гамма (41-49,75 Гц), степень концентрации и степень расслабления; и после того, как пользователь наденет на голову блок измерения мозговых волн, блок измерения мозговых волн автоматически осуществляет сбор данных о мозговых волнах пользователя и отправляет данные о мозговых волнах в микропроцессор с помощью модуля беспроводной связи.
11. Остановка и последующая обработка представлена следующим образом:
Управление двигателем(ями) осуществляется незамедлительным образом для остановки вращения после приема команды "стоп" и/или возникновения отклонений от нормального функционирования, таких как заблокированный ротор, превышение скорости, низкая мощность и ошибка работы;
статистические данные о текущем упражнении сохраняются и накапливаются;
Вызывается функциональный модуль вывода записи упражнений: данные об остановке текущего режима упражнения выводятся в модуль беспроводной связи, элементы данных включают в себя, но не ограничиваются этим, одно или более из: идентификации устройства, режима упражнений, времени начала, времени окончания, продолжительности, скорости работы и т.п., данные пересылаются модулем беспроводной связи в аналогичные универсальные интеллектуальные устройства, такие как смартфон или планшетный персональный компьютер, и затем пересылаются на сервер/в облачную систему для хранения с целью последующего статистического анализа, и/или совместного использования в социальных сетях и/или расчетов по счету с использованием карты; и
устройство возвращается в состояние готовности.
В способе осуществления предпочтительно используется положение стоя для выполнения упражнения, пользователь стоит на блоках лечебного массажа двумя ступнями параллельно друг другу, расстояние между ступнями составляет ширину плеч, голова и лицо расположены прямо, и тело расслаблено и сохраняет равновесие в соответствии с основами китайского Ушу (Chinese Wushu) или Чань Чжуан, (Zhan Zhuang) и регулирует физическое и психическое состояние, соблюдая требования, предъявляемые к устройству, и пытается предотвратить падение. Пользователь может осуществлять на практике действия китайского Ушу или способ выполнения упражнений, предотвращая падение после постепенной адаптации к устройству или его усложнения; предпочтительна поза для выполнения упражнений по меньшей мере с одной опорой для стопы для обеспечения неподвижности, например, синхронно с ритмом возвратно-поступательного перемещения устройства, пользователь может лучше и быстрее понять и освоить основные принципы при выполнении руками облака тайцзи (Taiji), и упражнение является очень сильным по ощущению ритма, имеет большой интерес и большую фигурную ценность.
Эффект от упражнений будет лучше, если пользователь в дальнейшем после тренировки будет осуществлять на практике китайское Ушу или другие китайские боевые искусства, такие как Тайцзицюань, используя данный вариант осуществления.
В вышеупомянутых вариантах осуществления описаны только предпочтительные варианты осуществления настоящего изобретения, которые не ограничивают объем настоящего изобретения, и аналогичным образом могут быть выполнены дополнительные варианты и модификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННАЯ ПИПЕТКА С ДИСПЛЕЕМ И МАНИПУЛЯТОРОМ ДЛЯ УПРАВЛЕНИЯ ЗАБОРОМ И РАСПРЕДЕЛЕНИЕМ ЖИДКОСТИ | 2004 |
|
RU2340397C2 |
| СПОСОБ ОТСЛЕЖИВАНИЯ ДЕЙСТВИЙ ВОДИТЕЛЯ ПРИ ПРОВЕДЕНИИ ЭКЗАМЕНА НА ПРАВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2023 |
|
RU2814461C1 |
| АНТЕННАЯ СИСТЕМА ДЛЯ ТЕЛЕМАТИЧЕСКОГО БЛОКА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2769941C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРОВЕДЕНИЯ ЭКЗАМЕНА НА ПРАВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2021 |
|
RU2793073C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА С ПРОЦЕССОРНЫМ ЭЛЕКТРОННЫМ КЛЮЧОМ | 2016 |
|
RU2720290C2 |
| МОДУЛЬ ЭЛЕКТРОПИТАНИЯ ДЛЯ МОДУЛЬНОГО ОБОРУДОВАНИЯ ТЕЛЕУПРАВЛЕНИЯ И ОБОРУДОВАНИЕ, ЕГО СОДЕРЖАЩЕЕ | 2015 |
|
RU2680591C2 |
| МОДУЛЬНОЕ ОБОРУДОВАНИЕ ТЕЛЕУПРАВЛЕНИЯ | 2015 |
|
RU2696293C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2801076C2 |
| Бортовое устройство для проведения экзамена на право управления транспортными средствами | 2023 |
|
RU2829004C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
Группа изобретений относится к медицинской технике. Устройство для физических упражнений содержит несущий блок, блок по меньшей мере одного двигателя и моста, блок по меньшей мере одного ведомого колеса и моста, блок источника питания и блок основной платы управления, включающий печатную плату, микропроцессор и модуль приведения в действие двигателя. Блоки лечебного массажа, которые представляют собой акупрессурные листы для создания давящей боли, расположены на верхней поверхности несущего блока. Дисплейный блок установлен в средней области верхней поверхности несущего блока. Блок основной платы управления содержит функциональный модуль автоматического реверсирования для переключения направления вращения по меньшей мере одного двигателя на обратное через заданные интервалы расстояния или времени, выполненный с возможностью приводить в действие устройство для выполнения автоматического непрерывного возвратно-поступательного перемещения с остановкой после приема команды останова. Раскрыт способ выполнения физических упражнений с использованием устройства для физических упражнений. Технический результат состоит в обеспечении обучения и тренировки за счет выполнения автоматического возвратно-поступательного перемещения и регулирования физического и психического состояния для предотвращения падения. 2 н. и 10 з.п. ф-лы, 2 ил.
1. Устройство для физических упражнений, содержащее несущий блок, блок по меньшей мере одного двигателя и моста, блок по меньшей мере одного ведомого колеса и моста, блок источника питания и блок основной платы управления, включающий печатную плату, микропроцессор и модуль приведения в действие двигателя; отличающееся тем, что дополнительно включает:
блоки лечебного массажа, которые представляют собой акупрессурные листы для создания давящей боли, расположенные на верхней поверхности несущего блока;
дисплейный блок, установленный в средней области верхней поверхности несущего блока.
при этом блок основной платы управления содержит функциональный модуль автоматического реверсирования для переключения направления вращения по меньшей мере одного двигателя на обратное через заданные интервалы расстояния или времени, выполненный с возможностью приводить в действие устройство для выполнения автоматического непрерывного возвратно-поступательного перемещения с остановкой после приема команды останова.
2. Устройство по п.1, отличающееся тем, что блок основной панели управления содержит функциональный модуль таймирования упражнений для автоматического вычисления продолжительности упражнения каждый раз и функциональный модуль паузы/возобновления.
3. Устройство по п.2, отличающееся тем, что содержит кнопочный пульт дистанционного управления с расположенными отдельно нажимными кнопками "пуск", "стоп", "ускорение" и "замедление".
4. Устройство по п.3, отличающееся тем, что блок основной платы управления содержит функциональный модуль незамедлительного реверсирования, выполненный с возможностью незамедлительного реверсирования под управлением пользователя в процессе автоматического возвратно-поступательного перемещения устройства, и
функциональный модуль возвратно-поступательного перемещения с постоянной скоростью, или функциональный модуль возвратно-поступательного перемещения с переменной скоростью, или функциональный модуль со случайно изменяющейся скоростью, или функциональный модуль возвратно-поступательного перемещения со случайно изменяющимся расстоянием, или функциональный модуль возвратно-поступательного перемещения со случайно изменяющейся скоростью и случайно изменяющимся расстоянием.
5. Устройство по п.1, отличающееся тем, что содержит громкоговоритель, а блок основной платы управления дополнительно содержит модуль воспроизведения аудио и модуль голосовых подсказок.
6. Устройство по п.1, отличающееся тем, что блок основной платы управления содержит функциональный модуль двусторонней беспроводной связи для приема и отправки в смартфон или планшетный персональный компьютер команд или данных, которые содержат: команды пульта дистанционного управления, команды установки параметров, команды запроса параметра, команды запроса состояния и команды считывания рабочих данных, статистические данные о продолжительности упражнений.
7. Устройство по п.1, отличающееся тем, что несущий блок выполнен в виде корпуса, который закрывает блок по меньшей мере одного двигателя и моста, а также блок по меньшей мере одного ведомого колеса и моста.
8. Устройство по п.1, отличающееся тем, что содержит блоки предотвращения столкновений, установленные на двух концах по направлению движения, соответственно, каждый блок предотвращения столкновений содержит расположенный в нем переключатель предотвращения столкновений, и переключатели предотвращения столкновений подключены к микропроцессору или блоку питания таким образом, чтобы устройство автоматически останавливалось незамедлительно или автоматически выполняло реверсирование при приближении к постороннему предмету во время движения.
9. Устройство по п.1, отличающееся тем, что блок основной платы управления содержит функциональный модуль контроля вращения двигателя для контроля сигналов вращения двигателя и выполнения статистического анализа сигналов вращения двигателя в реальном времени и функциональный модуль автоматической парковки.
10. Устройство по п.1, отличающееся тем, что блок основной платы управления содержит модуль управления полномочиями для проверки пароля перед запуском, установкой параметров или выводом данных и отказа выполнить запуск, установку параметров или вывод данных, если пароль является неправильным, и функциональный модуль ограниченного времени использования для предварительной установки ограничения времени использования.
11. Способ выполнения физических упражнений, согласно которому используют устройство для физических упражнений по п.1,
пользователь без обуви становится на блоки лечебного массажа лицом к одной его стороне в направлении, перпендикулярном направлению перемещения устройства, и
регулирует центр тяжести тела во время возвратно-поступательного перемещения для предотвращения падения,
при этом получает стимуляцию и массаж стоп с созданием давящей боли в области подошвы стопы за счет преодоления воздействия устройства.
12. Способ по п.11, отличающийся тем, что при выполнении упражнения пользователь слушает музыку.
| CN 107008000 A | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| CN 207856210 U, 14.09.2018 | |||
| CN 106846978A, 13.06.2017 | |||
| US 2018086400 A1, 29.03.2018 | |||
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ЧАСТНОГО И ОБЩЕГО БИОМЕХАНИЧЕСКОГО БАЛАНСА ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА НА ОРГАНИЗМЕННОМ И СЕГМЕНТАРНЫХ УРОВНЯХ В СТАТИЧЕСКОМ, ДИНАМИЧЕСКОМ И КИНЕТИЧЕСКОМ РЕЖИМАХ | 1997 |
|
RU2145831C1 |

