Область техники
Настоящее изобретение относится к области спутников, в частности, к удержанию спутников на орбите.
Уровень техники
Геостационарный спутник представляет собой спутник, движущийся по орбите вокруг Земли и следующий по направлению вращения Земли. Один оборот геостационарного спутника вокруг Земли занимает примерно 24 часов, что равно количеству времени, за которое Земля совершает один оборот вокруг своей оси. Данные виды спутников считаются геостационарными, поскольку они кажутся неподвижными при наблюдении из определенного места на Земле, и обычно используются в качестве спутников связи.
Геостационарные спутники имеют выделенные орбиты над экватором Земли, так что они не сталкиваются друг с другом и не создают помех друг от друга при осуществлении связи. Геостационарные спутники движутся по орбите с радиусом примерно 42164 километра от центра Земли. Спутники при таком радиусе делают один оборот вокруг Земли примерно за 24 часа (звездные сутки) под воздействием силы тяготения Земли. Орбита спутника может подвергаться возмущающим влияниям, таким как силы тяготения от Солнца и Луны, некруговая форма Земли, давление солнечного излучения и т.д. Для преодоления возмущающих влияний и удержания спутника на заданной орбите системы движения на спутнике выполняют активные маневры, которые также называют маневрами «удержания на орбите». При наблюдении из местоположения на Земле положение спутника поддерживают в пределах установленной орбитальной станции или «поста», имеющего заданные размеры. Удержание на орбите включает в себя управление долготой спутника, эксцентриситетом его орбиты и наклонением плоскости орбиты к экваториальной плоскости Земли.
Пример удержания на орбите описан в патенте США №6015116, выданном 18 января 2000 г. Система движения, описанная в патенте 6015116, использует четыре ракетных двигателя малой тяги, которые расположены по диагонали на задней стороне (зенита) спутника. Одна пара ракетных двигателей малой тяги имеет линию тяги, направленную через центр масс спутника, а другая пара имеет силы ракетного двигателя малой тяги, отделенные плечом момента от центра масс. Другой пример удержания на орбите описан в патенте США №7918420, выданном 05 апреля 2011 г. Оба патента включены в настоящий документ посредством ссылки в полном объеме.
Необходимо определить новые и усовершенствованные маневры для удержания спутника на орбите, которые являются эффективными, и, кроме того, более экономичными по расходу топлива.
Раскрытие изобретения
Варианты осуществления, описанные в данном документе, обеспечивают маневры для удержания спутника на орбите при отказе электрического двигателя малой тяги. Как описано в данном документе, спутник включает в себя спутниковую платформу, имеющую сторону надира, выполненную с возможностью быть обращенной к Земле, и сторону зенита, противоположную стороне надира. Северный электрический двигатель малой тяги установлен в направлении северного участка стороны зенита и ориентирован вниз для создания силы тяги по линии, проходящей через центр массы спутника. Южный электрический двигатель малой тяги установлен в направлении южного участка стороны зенита и ориентирован вверх для создания силы тяги по линии, проходящей через центр массы спутника. Спутник также содержит химические двигатели малой тяги. Восточный химический двигатель малой тяги установлен на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, и западный химический двигатель малой тяги установлен на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника.
Описанные выше двигатели малой тяги используют для маневров с целью удержания космического аппарата на орбите. Однако при отказе одного из электрических двигателей малой тяги данный электрический двигатель малой тяги не может использоваться для маневров. Один вариант осуществления, описанный в данном документе, включает в себя контроллер орбиты, способный управлять маневрами для удержания спутника на орбите при отказе электрического двигателя малой тяги. При обнаружении отказа контроллер орбиты управляет импульсом включения оставшегося электрического двигателя малой тяги в узле орбиты (например, восходящем или нисходящем). Контроллер орбиты также управляет импульсом включения одного из химических двигателей малой тяги на 90°±5° от импульса включения оставшегося электрического двигателя малой тяги, и управляет импульсом включения другого химического двигателя малой тяги на 270°±5° от импульса включения оставшегося электрического двигателя малой тяги.
В сценарии отказа, например, в данном, в наличии есть только один электрический двигатель малой тяги. Импульс включения оставшегося электрического двигателя малой тяги на его орбитальном узле создает изменение радиальной скорости спутника. Изменение радиальной скорости вследствие импульса включения оставшегося электрического двигателя малой тяги создает составляющую вектора дельта-эксцентриситета (Δе) орбиты спутника. Импульс включения одного химического двигателя малой тяги на 90°±5° создает первое изменение тангенциальной скорости спутника, которое, в свою очередь, создает составляющую Δе вследствие импульса включения данного химического двигателя малой тяги. Импульс включения других химических двигателей малой тяги на 270°±5° создает второе изменение тангенциальной скорости спутника, которое в свою очередь, создает составляющую Δе вследствие импульса включения другого химического двигателя малой тяги. Составляющие Δе, обусловленные импульсом включения химических двигателей малой тяги, компенсируют составляющую Δе вследствие импульса включения оставшегося электрического двигателя малой тяги.
Например, когда импульс включения оставшегося электрического двигателя малой тяги выполнено на прямом восхождении 270° или вблизи него, то данное импульс включения создает составляющую Δе, в основном указывающую вдоль оси X в геоцентрической системе координат. Импульсы включения химических двигателей малой тяги на прямом восхождении 0° и прямом восхождении 180° или вблизи них могут создавать составляющую Δе, в основном указывающую вдоль оси X в противоположном направлении, чем составляющая Δе, созданная оставшимся электрическим двигателем малой тяги. Маневры химических двигателей малой тяги компенсируют остаточный эксцентриситет, создаваемый импульсом электрического двигателя малой тяги только в одном из орбитальных узлов. Таким образом, спутник может удерживаться в точке стояния, даже при отказе одного из электрических двигателей малой тяги.
В одном варианте осуществления, контроллер орбиты выполнен с возможностью обнаруживать отказ северного электрического двигателя малой тяги для управления импульсом включения южного электрического двигателя малой тяги вблизи нисходящего узла, управления тормозным импульсом восточного химического двигателя малой тяги на 90°±5° от импульса включения южного электрического двигателя малой тяги и управления импульсом включения в направлении движения западного химического двигателя малой тяги на 270°±5° от импульса включения южного электрического двигателя малой тяги.
В другом варианте осуществления, контроллер орбиты выполнен с возможностью обнаружения отказа южного электрического двигателя малой тяги для управления импульсом включения северного электрического двигателя малой тяги вблизи восходящего узла, для управления тормозным импульсом восточного химического двигателя малой тяги на 90°±5° от импульса включения северного электрического двигателя малой тяги и управления импульсом включения в направлении движения западного химического двигателя малой тяги на 270°±5° от импульса включения северного электрического двигателя малой тяги.
Другие маневры для удержания спутника на орбите могут дополнительно использоваться для компенсации возмущений по сценарию отказа. В одном варианте осуществления, контроллер орбиты выполнен с возможностью обнаружения отказа одного из электрических двигателей малой тяги. Контроллер орбиты выполнен с возможностью управления импульсом включения оставшегося электрического двигателя малой тяги вблизи орбитального узла, создающего изменение радиальной скорости спутника, в случае отказа. Изменение радиальной скорости создает составляющую Δе орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги. Контроллер орбиты выполнен с возможностью определения составляющей Δе, обусловленной возмущениями, влияющими на орбиту спутника. Контроллер орбиты выполнен с возможностью управления импульсом включения восточного химического двигателя малой тяги, создающего первое изменение тангенциальной скорости спутника в первом положении спутника на орбите. Первое изменение тангенциальной скорости создает составляющую Δе вследствие импульса включения восточного химического двигателя малой тяги. Контроллер орбиты выполнен с возможностью управления импульсом включения западного химического двигателя малой тяги, создающего второе изменение тангенциальной скорости спутника во втором положении спутника на орбите. Второе изменение тангенциальной скорости создает составляющую Δе вследствие импульса включения западного химического двигателя малой тяги. Контроллер орбиты выполнен с возможностью выбирать первое положение импульса включения восточного химического двигателя малой тяги и второе положение импульса включения западного химического двигателя малой тяги так, что составляющая Δе, обусловленная импульсом включения восточного химического двигателя малой тяги, и составляющая Δе, обусловленная импульсом включения западного химического двигателя малой тяги, компенсируют составляющую Δе, обусловленную импульсом включения оставшегося электрического двигателя малой тяги, и составляющую Δе, обусловленную влиянием возмущений.
В одном варианте осуществления контроллер орбиты выполнен с возможностью определения положения Солнца в зависимости от времени года, а также определения составляющей Δе, обусловленной возмущениями в зависимости от положения Солнца.
Признаки, функции и преимущества, которые были описаны, могут обеспечиваться независимо друг от друга в различных вариантах осуществления, или могут быть объединены также в других вариантах осуществления, дополнительные детали которых можно увидеть со ссылкой на следующее описание и чертежи.
Краткое описание чертежей
Некоторые варианты осуществления настоящего изобретения будут описаны только в качестве примера со ссылкой на прилагаемые чертежи. Одинаковая ссылочная позиция представляет аналогичный элемент или аналогичный тип элемента на всех чертежах.
Фиг.1 показывает спутник в примерном варианте осуществления.
Фиг. 2 показывает сторону зенита спутниковой платформы в примерном варианте осуществления.
Фиг. 3 представляет собой вид сбоку спутниковой платформы в примерном варианте осуществления.
Фиг. 4 показывает орбиту спутника в примерном варианте осуществления.
Фиг. 5 показывает векторы скоростей, получающиеся вследствие импульса включения двигателя малой тяги в примерном варианте осуществления.
Фиг. 6 показывает эксцентриситет орбиты спутника.
Фиг. 7 показывает эксцентриситет, вызванный давлением солнечной радиации.
Фиг. 8 показывает разницу в продолжительностях включений двигателя вблизи восходящего узла и нисходящего узла в примерном варианте осуществления.
Фиг. 9 показывает смещение импульса включения вблизи восходящего узла и смещение импульса включения вблизи нисходящего узла в примерном варианте осуществления.
Фиг. 10 показывает целевой Δе, созданный с помощью маневров для удержания спутника на орбите в примерном варианте осуществления.
Фиг. 11 показывает импульс включения химических двигателей малой тяги вблизи восходящего узла и/или нисходящего узла в примерном варианте осуществления.
Фиг. 12 показывает импульс включения химического двигателя малой тяги спутника в положениях на орбите в примерном варианте осуществления.
Фиг. 13, 14 представляют собой блок-схемы, иллюстрирующие способ управления маневрами для удержания спутника на орбите в примерном варианте осуществления.
Фиг.15 представляет собой блок-схему, иллюстрирующую управление маневрами для удержания спутника на орбите по сценарию отказа в примерном варианте осуществления.
Фиг. 16 показывает импульс включения южного электрического двигателя малой тяги в нисходящем узле в примерном варианте осуществления.
Фиг. 17 показывает маневры на 90° и 270° от импульса включения оставшегося электрического двигателя малой тяги в примерном варианте осуществления.
Фиг. 18 представляет собой блок-схему, иллюстрирующую управление маневрами для удержания спутника на орбите по сценарию отказа в примерном варианте осуществления.
Фиг. 19 показывает тормозной импульс восточного химического двигателя малой тяги и импульс в направлении движения западного химического двигателя малой тяги в примерном варианте осуществления.
Фиг. 20 показывает целевой Δе для трех маневров в примерном варианте осуществления.
Фиг. 21 показывает тормозной импульс восточного химического двигателя малой тяги и импульс в направлении движения западного химического двигателя малой тяги в примерном варианте осуществления.
Осуществление изобретения
Фигуры и последующее описание иллюстрируют конкретные примерные варианты осуществления. Следует принять во внимание, что специалисты в данной области техники могут разработать различные системы расположения, которые, не будучи описанными или показанными в настоящем документе в явном виде, осуществляют принципы, описанные в настоящем документе, и включены в рассматриваемый объем формулы изобретения, следующей за данным описанием. Кроме того, любые примеры, описанные в настоящем документе, предназначены для понимания принципов изобретения и должны истолковываться как неограничивающие. В результате данное изобретение не ограничено конкретными вариантами осуществления или примерами, описанными ниже, а ограничено пунктами формулы изобретения и их эквивалентами.
Фиг. 1 показывает спутник 100 в примерном варианте осуществления. Спутник 100 включает в себя основной корпус, несущий полезную нагрузку спутника, который называется спутниковой платформой 102. При наблюдении с Земли спутниковая платформа 102 включает в себя сторону 104 надира (или переднюю сторону) и противоположную сторону 105 зенита (или заднюю сторону). Термины "сторона" или "поверхность" могут использоваться взаимозаменяемо при описании спутниковой платформы 102. Спутник 100 также включает в себя панели 108-109 солнечных батарей крыльевого типа, которые прикреплены к спутниковой платформе 102 и могут использоваться для получения электроэнергии от Солнца для питания различных компонентов на спутнике 100. Спутник 100 также включает в себя одну или больше антенн 112, которые могут использоваться для связи. Конструкция спутника 100, показанная на фиг. 1, является примером и может изменяться по желанию.
Спутник 100 выполнен с возможностью вращения по орбите вокруг Земли, например, по геостационарной орбите. Для удержания спутника 100 на его выделенной орбите контроллер 120 орбиты, или устройство управления орбитой, соединен со спутником 100. Контроллер 120 орбиты содержит устройства, компоненты или модули (включая в себя аппаратные средства, программное обеспечение или комбинацию аппаратных средств и программного обеспечения), управляющие маневрами для удержания спутника 100 на орбите. Контроллер 120 орбиты может находиться на Земле и обеспечивать возможность осуществления связи со спутником 100 посредством беспроводной передачи сигналов. Альтернативно, контроллер 120 орбиты может находиться на спутнике 100. Кроме того, контроллер 120 орбиты может быть разделен на модули, при этом часть контроллера 120 орбиты размещена на Земле, а часть размещена локально на спутнике 100.
Спутник 100 включает в себя двигательную установку, которая используется в маневрах для удержания космического аппарата на орбите. Фиг. 2 показывает сторону 105 зенита спутниковой платформы 102 в примерном варианте осуществления. Верхняя сторона спутниковой платформы 102 называется северной стороной (обозначенной "N"), нижняя сторона спутниковой платформы 102 называется южной стороной (обозначенной "S"). Левая сторона спутниковой платформы 102 на фиг. 2 называется западной стороной (обозначенной "W"), и правая сторона спутниковой платформы 102 на фиг. 2 называется восточной стороной (обозначенной "Е"). Сторона 105 зенита спутниковой платформы 102 содержит пару электрических двигателей 210-211 малой тяги, являющихся частью двигательной установки. Электрический двигатель малой тяги представляет собой тип двигателя малой тяги, создающего электрическую тягу за счет ускорения ионов. В обычном электрическом двигателе малой тяги, горючее (например, ксенон) вводится в ионизационную камеру и ионизируется путем электронной бомбардировки. Затем ионы ускоряются электромагнитным полем и испускаются из двигателя малой тяги в виде выхлопа, создавая тягу. Одним из примеров электрического двигателя малой тяги является ионная двигательная установка на ксеноне (XIPS ©), производимая компанией L-3 Communications of Aurora, Колорадо.
Электрический двигатель 210 малой тяги установлен в направлении северного участка стороны 105 зенита и в данном документе называется северным электрическим двигателем малой тяги. Электрический двигатель 211 малой тяги установлен в направлении южного участка стороны 105 зенита, и в данном документе называется южным электрическим двигателем малой тяги. В данном варианте осуществления северный электрический двигатель 210 малой тяги и южный электрический двигатель 211 малой тяги расположены по центру на стороне 105 зенита вдоль оси 230 север-юг спутниковой платформы 102. В других вариантах осуществления северный электрический двигатель 210 малой тяги и южный электрический двигатель 211 малой тяги могут быть смещены от центра.
Фиг. 3 представляет собой вид сбоку спутниковой платформы 102 в примерном варианте осуществления. Северный электрический двигатель 210 малой тяги ориентирован или наклонен вниз для создания силы тяги по линии, проходящей через центр массы 302 спутника 100. Линия 310 представляет собой линию действия тяги северного электрического двигателя 210 малой тяги, проходящую через центр массы 302. Ориентация северного электрического двигателя 210 малой тяги образует угол наклона θN между линией 310 действия тяги и осью 230 север-юг спутниковой платформы 102. Угол наклона θN может составлять 35°±25°. Северный электрический двигатель 210 малой тяги может быть зафиксирован под желаемым углом или может быть установлен на карданном подвесе так, чтобы контроллер 120 орбиты мог корректировать угол наклона θN северного электрического двигателя 210 малой тяги по желанию. Благодаря ориентации северного электрического двигателя 210 малой тяги, он способен создавать силу тяги в южном направлении (вниз на фиг. 3) и в радиальном направлении к Земле.
Южный электрический двигатель 211 малой тяги ориентирован или наклонен вверх для создания силы тяги по линии, проходящей через центр массы 302 спутника 100. Линия 311 представляет собой линию действия тяги южного электрического двигателя 211 малой тяги, проходящую через центр массы 302. Ориентация южного электрического двигателя 211 малой тяги образует угол θS наклона между линией 311 действия тяги и осью 230 север-юг спутниковой платформы 102. Угол θS наклона может составлять 35°±25°. Южный электрический двигатель 211 малой тяги может быть закреплен под желаемым углом или может быть установлен на карданном подвесе так, чтобы контроллер 120 орбиты мог регулировать угол наклона θS южного электрического двигателя 211 малой тяги по желанию. Благодаря ориентации южного электрического двигателя 211 малой тяги он способен создавать тягу в северном направлении (направление вверх на фиг. 3) и в радиальном направлении к Земле.
Количество или положения электрических двигателей 210-211 малой тяги, показанные на фиг. 2-3, создают примерную конфигурацию. Маневры для удержания спутника на орбите, описанные в данном документе, применимы к любой конфигурации, в которой электрические двигатели малой тяги создают изменение скорости в направлении из плоскости (или изменение нормальной скорости) и изменение радиальной скорости.
На фиг. 2 химический двигатель 220 малой тяги установлен на западной стороне спутниковой платформы 102, а химический двигатель 221 малой тяги установлен на восточной стороне спутниковой платформы 102. Химический двигатель малой тяги является типом двигателя малой тяги, который сжигает жидкое горючее для создания тяги. Один из типов химического двигателя малой тяги называется двигателем малой тяги, который работает на двухкомпонентном ракетном топливе (или двухкомпонентным), и сжигающий жидкое топливо и жидкий окислитель в камере сгорания. Химический двигатель 220 малой тяги может находиться в центре на западной стороне спутниковой платформы 102 для создания силы тяги по линии, проходящей через центр массы 302 спутника 100 (см. фиг. 3). Аналогично, химический двигатель 221 малой тяги может находиться в центре на восточной стороне спутниковой платформы 102 для создания силы тяги по линии, проходящей через центр массы 302 спутника 100.
В одном варианте осуществления, химические двигатели малой тяги 224 могут устанавливаться на северной стороне спутниковой платформы 102, а химические двигатели малой тяги 225 могут устанавливаться на южной стороне спутниковой платформы 102. Северный и южный химические двигатели малой тяги 224-225 являются необязательными. Если установлены северный и южный химические двигатели 224-225 малой тяги, их положения могут варьироваться в зависимости от антенн, панелей солнечных батарей и другого полетного оборудования, закрепленного на северной и южной сторонах спутниковой платформы 102.
Двигательная установка спутника 100 может включать в себя другие двигатели малой тяги, не показанные на фиг. 2-3. Например, на северном участке стороны 105 зенита может быть установлен резервный электрический двигатель малой тяги на случай отказа северного электрического двигателя 210 малой тяги. Аналогично, на южном участке стороны 105 зенита может быть установлен резервный электрический двигатель малой тяги на случай отказа южного электрического двигателя 211 малой тяги. Дополнительные химические двигатели малой тяги могут также устанавливаться на стороне 105 зенита и любой комбинации северной, южной, восточной и западной сторон. Поскольку двигатели малой тяги и горючее являются дорогостоящими, может быть желательным уменьшение количества двигателей малой тяги, используемых в маневрах для удержания космического аппарата на орбите, и уменьшить количество маневров, выполняемых во время удержания на орбите.
Фиг. 4 показывает орбиту спутника 100 в примерном варианте осуществления. Эллипс, показанный пунктиром, отображает экваториальную плоскость 402 Земли 404, которая является плоскостью, проходящей через экватор Земли 404. Пунктирная стрелка отображает точку 406 весеннего равноденствия, в которой экваториальная плоскость проходит через центр Солнца. Сплошной эллипс отображает орбитальную плоскость 408 орбиты спутника 100, по которой он движется вокруг Земли 404.
Если бы Земля 404 была идеальной сферой и изолирована от других тел в солнечной системе, орбита спутника представляла бы собой эллипс постоянного размера и формы, ориентация которой в плоскости оставалась бы неизменной. Однако различные силы вызывают возмущение орбиты спутника 100, что вызывает изменение формы орбиты и отличие ориентации орбитальной плоскости 408 от экваториальной плоскости 402. Например, гравитационные силы Солнца и Луны, несферическая форма Земли 404, давление солнечной радиации и прочее, могут оказывать воздействие на орбиту спутника 100. Возмущения могут привести к наклону орбитальной плоскости 408 спутника 100 относительно экваториальной плоскости 402, который называется наклонением. Наклонение является параметром орбиты, описывающим угол между орбитальной плоскостью спутника и экваториальной плоскостью. Если орбитальная плоскость 408 наклонена относительно экваториальной плоскости 402, связь между орбитальной плоскостью 408 и экваториальной плоскостью 402 может быть описана с помощью его орбитальных узлов. Восходящий узел находится там, где орбитальная плоскость 408 пересекает экваториальную плоскость 402, проходящую с юга на север. На фиг. 4, восходящий узел 412 составляет около 90° от точки 406 весеннего равноденствия. Нисходящий узел находится там, где орбитальная плоскость 408 пересекает экваториальную плоскость 402, проходящую с севера на юг. На фиг. 4 нисходящий узел 414 находится на около 270° от точки 406 весеннего равноденствия, или на 180° от восходящего узла 412.
Возмущения могут также сделать орбиту спутника 100 в большей степени эллиптической, чем круговой, что называется эксцентриситетом. Эксцентриситет является орбитальным элементом, который указывает на отклонение орбиты от окружности. Значение эксцентриситета, равное 0, указывает на круговую орбиту, а значения между 0 и 1 описывают эллиптическую орбиту. Эксцентриситет орбиты можно охарактеризовать вектором эксцентриситета, который представляет собой вектор, указывающий на перигей, и имеющий величину, равную скалярному эксцентриситету орбиты (величина находится в диапазоне от 0 до 1 и является безразмерной). Когда эксцентриситет орбиты больше чем 0, форма орбиты вокруг Земли становится в большей степени эллиптической, чем круговой. Для эллиптической орбиты самая длинная и самая короткая линии, которые можно провести через центр эллипса, называются большой осью и малой осью, соответственно. Большая полуось составляет половину большой оси, и представляет собой среднее расстояние от спутника до Земли. Перигей представляет собой ближайшую к Земле точку на орбите, напротив перигея находится апогей, который является самой дальней от Земли точкой на орбите. При описании эллиптической орбиты вектор эксцентриситета указывает на перигей и имеет величину, равную эксцентриситету (е) эллипса (0<е<1).
Варианты осуществления, представленные ниже, описывают маневры для удержания спутника на орбите, которые компенсируют наклонение и эксцентриситет орбиты спутника. Маневры для удержания спутника на орбите включают в себя импульсы включения одного или нескольких двигателей малой тяги спутника 100 при его движении по орбите вокруг Земли 404. Импульс включения двигателя малой тяги производит или создает изменение скорости (ΔV) спутника 100. Фиг. 5 показывает векторы скоростей, возникающие вследствие импульсов включения двигателей малой тяги в примерном варианте осуществления. Импульсы включения двигателей малой тяги могут создавать ΔV в нормальном направлении, тангенциальном направлении и/или радиальном направлении. Нормальное направление - это направление, перпендикулярное к орбитальной плоскости спутника 100, тангенциальное направление - это направление движения спутника 100 по касательной к его орбите, и радиальное направление - это направление в сторону Земли 404. Хотя электрические двигатели 210-211 малой тяги не показаны на фиг. 5, импульс включения северного электрического двигателя 210 малой тяги создает ΔV в радиальном направлении (ΔVradial) и в нормальном направлении (ΔVnormal) благодаря его углу наклона (см. фиг. 3). Импульс включения южного электрического двигателя 211 малой тяги благодаря его углу наклона (см. фиг. 3) создает ΔV в радиальном направлении и нормальном направлении. Импульс включения западного химического двигателя 220 малой тяги или восточного химического двигателя 221 малой тяги создает ΔV в тангенциальном направлении (ΔVtan).
ΔV в нормальном направлении может использоваться для компенсации наклонения орбитальной плоскости 408 (см. фиг. 4). Маневры в узлах или вблизи орбитальных узлов обеспечивают наиболее эффективную компенсацию наклонения. Например, импульс включения северного электрического двигателя 210 малой тяги вблизи восходящего узла 412 создает ΔV в нормальном направлении, и импульс включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 также создает ΔV в нормальном направлении. Общее ΔVnormal компенсирует наклонение орбитальной плоскости 408. Каждое из данных включений двигателей также создает ΔV в радиальном направлении. Если продолжительность включений двигателей одинакова, ΔVradial, созданное в восходящем узле 412 и в нисходящем узле 414, компенсируют друг друга, так что суммарное ΔVradial отсутствует.
Электрические двигатели 210-211 малой тяги эффективно используются для компенсации наклонения данным образом, но обычно не используются для компенсации эксцентриситета орбиты спутника. Варианты осуществления, описанные в данном документе, используют электрические двигатели 210-211 малой тяги для компенсации эксцентриситета в дополнение к наклонению.
Фиг. 6 показывает эксцентриситет орбиты спутника 100. Орбита спутника 100 на фиг. 6 показана в геоцентрической системе координат в качестве примера. Ось X (или ось K1) соответствует точке 406 весеннего равноденствия, ось Y (или ось H1) показана под углом 90° к оси X. Ось Z в геоцентрической системе координат проходит с севера на юг вдоль полюсов Земли 404, то есть, перпендикулярно к плоскости листа или от листа на фиг. 6. Эксцентриситет орбиты может быть представлен вектором эксцентриситета. Вектор (е) эксцентриситета включает в себя x-составляющую (eX) вдоль оси X и y-составляющую (eY) вдоль оси Y. Вектор эксцентриситета указывает на перигей 604 и имеет величину MAG.
Эксцентриситет, показанный на фиг. 6, может быть вызван давлением солнечной радиации и/или другими возмущениями. Фиг. 7 показывает эксцентриситет, вызванный давлением солнечной радиации. В геоцентрической модели положение Солнца 702 зависит от времени года. Например, в день весеннего равноденствия, Солнце 702 находится в точке 406 весеннего равноденствия, что составляет 0°. В течение года Солнце 702 "движется по орбите" Земли 404 на около 1° в сутки (360°÷365 дней ≈ 1°/сутки). Солнце 702 на фиг. 7 показано на около 300°. Давление солнечного излучения от Солнца 702 толкает спутник 100 при его движении по орбите. Это давление создает ΔV в направлении от Солнца 702. Фиг. 7 иллюстрирует ΔV, созданное в четырех различных орбитальных позициях, но следует понимать, что давление может оказывать воздействие на спутник 100 на всей орбите.
Изменение вектора скорости (ΔV) спутника 100 создает изменение вектора эксцентриситета (Δе), перпендикулярного к ΔV. Как показано на фиг. 7, каждое ΔV дает в результате соответствующую составляющую Δе, которая указывает на 90° позади ΔV. Составляющие Δе суммируются, создавая вектор эксцентриситета орбиты, вызванный давлением солнечного излучения. Как можно увидеть из фиг. 7, эксцентриситет, вызванный давлением солнечной радиации, указывает на 90° впереди Солнца 702. Следовательно, перигей орбиты спутника будет опережать Солнце 702 на 90°. Если Солнце 702 находится на нуле градусов (около 21 марта), эксцентриситет, вызванный давлением солнечного излучения, указывает на 90°. Если Солнце 702 находится на 90°, эксцентриситет, вызванный давлением солнечного излучения, указывает на 180°. Если Солнце 702 находится на 180° (около 21 сентября), эксцентриситет, вызванный давлением солнечного излучения, указывает на 270°. Если Солнце находится на 270°, эксцентриситет, вызванный давлением солнечного излучения, указывает на 0°.
Маневры для удержания спутника на орбите, описанные в данном документе, способны компенсировать эксцентриситет, вызванный давлением солнечной радиации и другими возмущениями. Маневры для удержания спутника на орбите создают целевой Δе в направлении, противоположном эксцентриситету, вызванному давлением солнечной радиации и другими возмущениями. Для создания целевого Δе, продолжительность импульса включения двигателя вблизи восходящего узла 412 отличается от продолжительности импульса включения двигателя вблизи нисходящего узла 414. Фиг. 8 показывает разницу в продолжительностях включений двигателя вблизи восходящего узла 412 и нисходящего узла 414 в примерном варианте осуществления. В данном варианте осуществления, продолжительность 802 импульса включения северного электрического двигателя 210 малой тяги показана вблизи восходящего узла 412, а продолжительность 804 импульса включения южного электрического двигателя 211 малой тяги показана вблизи нисходящего узла 414. Для компенсации наклонения орбитальной плоскости 408 определяется по меньшей мере частично общее или суммарное время импульса включения двигателей 210-211 малой тяги. Разница продолжительностей 802 и 804 включений двигателей создает составляющую Δе вдоль оси X. Например, если общее время импульса включения двигателей составляет 6 часов, продолжительность 802 импульса включения двигателя может быть распределена на 4 часа, в то время как продолжительность 804 импульса включения двигателя может быть распределена на 2 часа. Импульс включения северного электрического двигателя 210 малой тяги создает ΔVradial, которая больше, чем ΔVradial, создаваемая импульсом включения южного электрического двигателя 211 малой тяги. Суммарная ΔVradial, созданная двумя маневрами, направлена в основном вдоль оси Y и дает в результате составляющую Δе вдоль оси X. Радиальные скорости компенсируются, если импульсы включения имеют одинаковую продолжительность. Если существует разница между продолжительностями включений северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги, ΔVradial в орбитальных узлах не исчезает и остается суммарное ΔVradial. В примере, показанном на фиг. 8, величина ΔVradial в восходящем узле 412 больше, чем величина ΔVradial в нисходящем узле 414, поскольку в восходящем узле 412 продолжительность включений двигателя больше. Разница продолжительностей включений двигателя в двух узлах орбиты в результате дает составляющую Δе вдоль отрицательной оси X.
Для дополнительного создания целевого Δе с использованием маневров, импульсы включения двигателей вблизи восходящего узла 412 и нисходящего узла 414 могут быть сдвинуты во времени относительно их соответствующих орбитальных узлов. Фиг. 9 показывает смещение импульса включения двигателя вблизи восходящего узла 412 и смещение импульса включения двигателя вблизи нисходящего узла 414 в примерном варианте осуществления. В данном варианте осуществления импульс 902 включения северного электрического двигателя 210 малой тяги показано вблизи восходящего узла 412, а импульс 904 включения южного электрического двигателя 211 малой тяги показано вблизи нисходящего узла 414. Центр импульса 902 включения двигателя сдвинут от восходящего узла 412 на величину смещения 912. Центр импульса 902 включения двигателя показан как находящийся за восходящим узлом 412, но в других примерах он может быть перед восходящим узлом 412. Центр импульса 904 включения двигателя сдвинут от нисходящего узла 414 на величину смещения 914. Центр импульса 904 включения двигателя показан, как находящийся перед нисходящим узлом 414, но в других примерах он может находиться за нисходящим узлом 414. Смещения 912 и 914 могут определяться сдвигом во времени, градусах и т.п.
Разница в смещениях положений импульсов включения 902 и 904 двигателей создает составляющую Δе в основном вдоль оси Y. Импульс 902 включения северного электрического двигателя 210 малой тяги образует ΔVradial, а импульс 904 включения южного электрического двигателя 211 малой тяги образует ΔVradial. Суммарная ΔVradial создается двумя маневрами, что в результате дает составляющую Δе вдоль оси Y. Радиальные скорости компенсируются, если импульсы включения расположены по центру в орбитальных узлах 412 и 414. Когда существует различие между смещениями северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги, ΔVradial в орбитальных узлах не исчезает и остается суммарная ΔVradial.
Для создания целевого Δе, контроллер 120 орбиты может изменять продолжительность включений двигателя между узлами орбиты для создания составляющей Δе вдоль оси X (или в основном вдоль оси X). Кроме того, контроллер 120 орбиты может изменять смещение положений включений двигателя вблизи орбитальных узлов для создания составляющей Δе вдоль оси Y (или в основном вдоль оси Y). Комбинация данных двух различий может создавать суммарную ΔVradial, которая, в свою очередь, создает целевой Δе (Δецелевой=Δex+Δey), который компенсирует эксцентриситет, созданный давлением солнечной радиации и другими возмущениями. Фиг. 10 показывает целевой Δе, созданный с помощью маневров для удержания спутника на орбите в примерном варианте осуществления. Предположим, что на фиг. 10 разница между продолжительностями включений двигателя создает составляющую Δex и разница смещений включений двигателя создает составляющую Δey. Составляющие Δex и Δey суммируются, создавая целевой Δе. Контроллер орбиты может корректировать выполнение маневров, чтобы целевой Δе указывал в направлении, противоположном направлению вектора эксцентриситета, созданного давлением солнечной радиации и другими возмущениями, как показано на фиг. 7. Таким образом, маневры, выполненные для удержания спутника на орбите, компенсируют эксцентриситет, созданный Солнцем 702.
Если маневры, выполненные электрическими двигателями 210-211 малой тяги, не обеспечивают достаточной ΔVradial для создания целевого Δе, контроллер 120 орбиты может также включить западный химический двигатель 220 малой тяги и/или восточный химический двигатель 221 малой тяги для помощи в создании целевого Δе. Импульсы включения химических двигателей 220-221 малой тяги могут выполняться на орбитальном узле или вблизи него, или могут выполняться в других положениях спутника 100 на орбите в зависимости от желаемого направления целевого Δе. Для увеличения составляющей Δе, созданной импульсами включения электрических двигателей 210-211 малой тяги, контроллер 120 орбиты может управлять импульсом включения восточного химического двигателя 221 малой тяги в положении спутника 100 на орбите, создающего ΔVtan спутника 100. ΔVtan создает составляющую Δе вследствие импульса включения восточного химического двигателя 221 малой тяги. Контроллер 120 орбиты может также управлять импульсом включения западного химического двигателя 220 малой тяги в положении спутника 100 на орбите, который создает другой ΔVtan спутника 100. ΔVtan создает составляющую Δе вследствие импульса включения западного химического двигателя 220 малой тяги. Для создания целевого Δе, контроллер 120 орбиты выбирает положения включений химических двигателей 220-221 малой тяги так, что составляющие Δе от данных включений суммируются с составляющей Δе от включений электрических двигателей 210-211 малой тяги.
Фиг. 11 показывает импульс включения химического двигателя малой тяги вблизи восходящего узла 412 и/или нисходящего узла 414 в примерном варианте осуществления. Импульс включения восточного химического двигателя 221 малой тяги создает ΔV в тангенциальном направлении. Данное ΔV направлено против движения спутника 100 по орбите и называется тормозным импульсом. ΔVtan вблизи восходящего узла 412 направлено вдоль оси X, создавая составляющую Δе в основном вдоль оси Y. Данная составляющая Δey добавляется к составляющей Δе, обусловленной импульсом включения электрических двигателей 210-211 малой тяги, создавая целевой Δе. Импульс включения западного химического двигателя 220 малой тяги создает ΔV в тангенциальном направлении. Данное ΔV направлено в сторону движения спутника 100 по орбите и называется импульсом в направлении движения по орбите. ΔVtan вблизи нисходящего узла 414 направлено вдоль оси X, создавая составляющую Δе в основном вдоль оси Υ. Данная составляющая Δey добавляется к составляющей Δе, обусловленной импульсом включения электрических двигателей 210-211 малой тяги и составляющей Δey вследствие импульса включения восточного химического двигателя 221 малой тяги, создавая целевой Δе. Маневры, показанные на фиг. 11, являются лишь одним примером, показывающим, как импульсы включения одного или нескольких химических двигателей 220-221 малой тяги могут увеличивать составляющие Δе, созданные импульсами включения электрических двигателей 210-211 малой тяги.
Фиг. 12 показывает импульс включения химического двигателя малой тяги в положениях спутника 100 на орбите в примерном варианте осуществления. Импульс включения западного химического двигателя 220 малой тяги и/или восточного химического двигателя 221 малой тяги может выполняться практически в любом положении на орбите. Импульс включения восточного химического двигателя 221 малой тяги создает ΔVtan в положении 1202, создавая составляющую Δex и составляющую Δey. Составляющие Δex и Δey могут суммироваться с составляющей Δе, обусловленной импульсом включения электрических двигателей 210-211 малой тяги для создания целевого Δе. Аналогично, импульс включения западного химического двигателя 220 малой тяги создает ΔVtan в положении 1204, создавая составляющую Δex и составляющую Δey. Составляющие Δex и Δey могут суммироваться с составляющей Δе, обусловленной импульсом включения электрических двигателей 210-211 малой тяги, и составляющими Δex и Δey, обусловленными импульсом включения восточного химического двигателя 221 малой тяги для создания целевого Δе. Положения 1202 и 1204 обычно разнесены друг от друга на 180°, но угловое расстояние между положениями может отличаться от 180° в зависимости от желаемой составляющей Δе. Маневры, показанные на фиг. 12 являются лишь одним примером, показывающим, как импульсы включения одного или нескольких химических двигателей 220-221 малой тяги могут увеличивать составляющие Δе, созданные импульсами включения электрических двигателей 210-211 малой тяги.
Контроллер 120 орбиты может осуществлять любую комбинацию описанных выше маневров для создания целевого Δе. Примерный процесс удержания на орбите, реализованный с помощью контроллера 120 орбиты, показан на фиг. 13-14. Фиг. 13-14 представляют собой блок-схемы, иллюстрирующие способ 1300 управления маневрами для удержания спутника 100 на орбите в примерном варианте осуществления. Этапы способа 1300 будут описаны в отношении спутника 100 на фиг. 1-3, хотя специалисту в данной области техники понятно, что способы, описанные в данном документе, могут применяться для других спутников или систем, которые не показаны. Этапы способов описанных в данном документе не включают в себя все этапы и могут включать в себя другие этапы, которые не показаны. Этапы в блок-схемах, показанные в данном документе, могут также выполняться в альтернативном порядке.
При инициировании маневров для удержания на орбите контроллер 120 орбиты может определить или установить наклон плоскости 408 орбиты спутника 100 (этап 1302). Контроллер 120 орбиты может также определить, установить или оценить эксцентриситет, вызванный возмущениями, например, давлением солнечной радиации (этап 1304). Как описано выше, эксцентриситет от давления солнечной радиации изменяет направление в зависимости от положения Солнца. Следовательно, контроллер 120 орбиты может оценить направление и величину эксцентриситета, вызванного давлением солнечной радиации, в зависимости от времени года.
Затем контроллер 120 орбиты определяет параметры маневров для удержания спутника на орбите для компенсации наклонения орбитальной плоскости 408 и/или эксцентриситета, созданного возмущениями, например, давлением солнечной радиации. При определении параметров контроллер 120 орбиты определяет общую продолжительность импульса включения для северного электрического двигателя 210 малой тяги и южного электрического двигателя 210 малой тяги в комбинации (этап 1308). Рассчитывается общая продолжительность импульса включения северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги для компенсации наклонения орбитальной плоскости 408. Затем контроллер 120 орбиты делит общую продолжительность импульса включения на различные продолжительности импульса включения вблизи восходящего узла 412 и нисходящего узла 414. Выполнение импульса включения "вблизи" орбитального узла, означает выполнение импульса включения около или рядом с орбитальным узлом. Контроллер 120 орбиты выбирает продолжительность импульса включения северного электрического двигателя 210 малой тяги вблизи восходящего узла 412, отличающуюся от продолжительности импульса включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 (этап 1310). Разница продолжительностей включений двигателей вблизи восходящего и нисходящего узлов создает составляющую Δе в основном вдоль оси X (см. фиг. 8).
Контроллер 120 орбиты также определяет, когда выполняются импульсы включения относительно орбитальных узлов. Контроллер 120 орбиты выбирает смещение импульса включения северного электрического двигателя 210 малой тяги относительно восходящего узла 412, отличающееся от смещения импульса включения южного электрического двигателя 211 малой тяги относительно нисходящего узла 414 (этап 1312). Смещение указывает на величину сдвига положения центра включения от орбитального узла. При обычных маневрах для удержания спутника на орбите импульсы включения сконцентрированы около восходящего узла и нисходящего узла. В данном варианте осуществления центры включений северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги могут быть сдвинуты от центра орбитального узла по времени, на градусы и т.п.Минимальным смещением для одного из включений двигателя является ноль, а максимальное смещение ограничено продолжительностью импульса включения и желаемой величиной коррекции наклонения. Разница в смещениях положений включений двигателя вблизи восходящего и нисходящего узлов создает составляющую Δе в основном вдоль оси Y (см. фиг. 9).
Затем контроллер 120 орбиты управляет импульсом включения северного электрического двигателя 210 малой тяги вблизи восходящего узла 412 (этап 1314) и управляет импульсом включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 (этап 1316). Импульсы включения электрических двигателей 210-211 малой тяги могут выполняться ежедневно (или почти ежедневно в течение годового периода или дольше).
Если импульсы включения электрических двигателей малой тяги не обеспечивают достаточной составляющей Δе, контроллер 120 орбиты может управлять импульсом включения западного химического двигателя 220 малой тяги и/или восточного химического двигателя 221 малой тяги, как показано на фиг. 14. Контроллер 120 орбиты может управлять импульсом включения восточного химического двигателя 221 малой тяги в положении спутника 100 на орбите (этап 1318), что создает ΔVtan спутника 100. ΔVtan создает составляющую Δе вследствие импульса включения восточного химического двигателя 221 малой тяги. Контроллер 120 орбиты может дополнительно или альтернативно управлять импульсом включения западного химического двигателя 220 малой тяги в положении спутника 100 на орбите (этап 1320), создавая ΔVtan спутника 100. ΔVtan создает составляющую Δе вследствие импульса включения западного химического двигателя 220 малой тяги. Контроллер 120 орбиты выбирает положение импульса включения восточного химического двигателя 221 малой тяги и/или положение импульса включения западного химического двигателя 220 малой тяги так, что их составляющие Δе суммируются с составляющей Δе, обусловленной импульсом включения электрических двигателей 210-211 малой тяги. Суммирование данных составляющих Δе компенсирует эксцентриситет, обусловленный возмущениями.
Описанная выше комбинация включений двигателей способна создавать целевой Δе для компенсации возмущений. Например, для нейтрализации эксцентриситета, вызванного солнцем, описанные выше маневры для удержания спутника на орбите могут создавать целевой Δе, указывающий на около 90° за Солнцем. Целевой Δе указывает в направлении, противоположном вектору эксцентриситета, вызванного Солнцем. Так как положение Солнца изменяется в течение года, контроллер 120 орбиты может корректировать маневры для удержания спутника на орбите, так что целевой Δе продолжает указывать на около 90° за Солнцем.
Могут быть случаи, когда один из электрических двигателей 210-211 малой тяги отказывает. Как видно на фиг. 2, спутник 100 может не иметь резервного северного и южного электрических двигателей малой тяги. Следовательно, отказ одного из двигателей малой тяги не позволит включить двигатели в обоих, и в восходящем узле 412, и нисходящем узле 414, как описано выше. Если резервные двигатели малой тяги установлены, могут быть случаи, когда отказывают оба из северных электрических двигателей малой тяги или оба из южных электрических двигателей малой тяги. Если происходит отказ, контроллер 120 орбиты может перейти к различным маневрам для удержания спутника на орбите по сценарию отказа, как показано на фиг. 15.
Фиг. 15 представляет блок-схему, иллюстрирующую способ 1500 управления маневрами для удержания спутника на орбите по сценарию отказа в примерном варианте осуществления. Контроллер 120 орбиты обнаруживает, что отказал (этап 1502) один из следующих, северный электрический двигатель 210 малой тяги или южный электрический двигатель 211 малой тяги. Отказ электрического двигателя малой тяги может лишить двигатель малой тяги возможности обеспечить любую тягу или тягу, достаточную для маневра. Контроллер 120 орбиты также определяет параметры маневров по сценарию отказа для компенсации наклонения орбитальной плоскости 408, например, общую продолжительность импульса включения для компенсации наклонения орбитальной плоскости. Поскольку только один электрический двигатель малой тяги является работоспособным, общую продолжительность импульса включения применяют в отношении оставшегося электрического двигателя малой тяги, который является работоспособным. Импульсы включения оставшегося электрического двигателя малой тяги в связанном с ним орбитальном узле (т.е. восходящем или нисходящем) обычно достаточно для компенсации наклонения. В случае если импульса включения оставшегося электрического двигателя малой тяги не достаточно, управление наклонением может быть усилено с помощью либо северного, либо южного химического двигателя 224-225 малой тяги в связанном с ним орбитальном узле (т.е. восходящем или нисходящем). Контроллер 120 орбиты управляет импульсом включения оставшегося электрического двигателя малой тяги вблизи связанного с ним орбитального узла (этап 1504). Предположим в качестве примера, что отказал северный электрический двигатель 210 малой тяги. Тогда контроллер 120 орбиты будет управлять импульсом включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414. Фиг. 16 показывает импульс включения южного электрического двигателя 211 малой тяги в нисходящем узле 414 в примерном варианте осуществления. В данном варианте осуществления импульс 1604 включения южного электрического двигателя 211 малой тяги показано в нисходящем узле 414. Общая продолжительность импульса включения двигателя 211 малой тяги определяется, по меньшей мере частично, для компенсации наклонения орбитальной плоскости 408. Например, если общая продолжительность импульса включения для компенсации наклонения составляет 6 часов, тогда время импульса 1602 включения южного электрического двигателя 211 малой тяги в нисходящем узле 414 может составлять около 6 часов. Импульс 1602 включения показан с центром в нисходящем узле 414. Импульс включения оставшегося электрического двигателя малой тяги может выполняться каждый день или почти каждый день исходя из необходимости управления наклонением.
Поскольку импульс включения электрического двигателя малой тяги выполняется только в одном орбитальном узле, существует остаточный ΔVradial, создающий составляющую Δе (ΔAELEc) орбиты спутника 100 вследствие импульса включения оставшегося электрического двигателя малой тяги. Составляющая Δе на фиг. 16 показана вдоль оси X в предположении, что нисходящий узел 414 находится на около 270°. Для компенсации составляющей Δе, созданной импульсом включения только в одном орбитальном узле, контроллер 120 орбиты управляет импульсом включения одного из химических двигателей 220-221 малой тяги на 90° от импульса включения оставшегося электрического двигателя малой тяги с отклонением на ±5° (этап 1506), и управляет импульсом включения другого химического двигателя 220-221 малой тяги на 270° от импульса включения оставшегося электрического двигателя малой тяги с отклонением на ±5° (этап 1508). Например, когда импульс включения оставшегося электрического двигателя малой тяги выполняется на прямом восхождении 270° или вблизи него, то импульс включения одного из химических двигателей 220-221 малой тяги может быть на прямом восхождении 0° и импульс включения другого химического двигателя 220-221 малой тяги может быть на прямом восхождении 180°. Прямое восхождение является угловым расстоянием, измеряемым в восточном направлении вдоль небесного экватора от точки весеннего равноденствия. Солнце находится на прямом восхождении, равном 0° при весеннем равноденствии, на прямом восхождении, равном 90° в день летнего солнцестояния, на прямом восхождении, равном 180° при осеннем (осень) равноденствии и на прямом восхождении, равном 270° в день зимнего солнцестояния. Угловое расстояние включений химических двигателей 220-221 малой тяги является приближенной величиной, которая может меняться в пределах допустимых отклонений орбитальной механики. Например, прямое восхождение, равное 0°, может означать 0° ± допуск или отклонение, например, 0°±1°, 0°±2° и т.д. Кроме того, прямое восхождение, равное 180°, может означать 180° ± допуск или отклонение, например 180°±1°, 180°±2° и т.д. Импульсы включения химических двигателей 220-221 малой тяги могут происходить каждые несколько дней по мере необходимости для компенсации Δе, вызванного импульсом включения оставшегося электрического двигателя 210 малой тяги-211.
Фиг. 17 показывает маневры на 90° и 270° от импульса включения оставшегося электрического двигателя малой тяги в примерном варианте осуществления. Как показано на фиг. 16, импульс 1604 включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 создает составляющую Δе вдоль оси X (показанную как ΔeELEc). Контроллер 120 орбиты управляет тормозным импульсом 1702 восточного химического двигателя 221 малой тяги на около 90° от импульса включения южного электрического двигателя 211 малой тяги, который находится на прямом восхождении или вблизи него, равном 0°, на фиг. 17. Тормозной импульс 1702 создает изменение (ΔVtan) скорости в направлении по касательной и противоположном движению спутника. ΔVtan создает составляющую Δе (показанную как ΔеснЕм-1) вдоль оси X. Контроллер 120 орбиты также управляет импульсом 1704 в направлении движения по орбите западного химического двигателя 220 малой тяги на около 270° от импульса включения южного электрического двигателя 211 малой тяги, показанного на прямом восхождении, равном 180° или вблизи него. Импульс 1704 в направлении движения по орбите создает другое изменение (ΔVtan) скорости в направлении по касательной и по ходу движения спутника 100. ΔVtan создает составляющую Δе (показанную как ΔеснЕм-2) вдоль оси X. Комбинация составляющих Δе, созданных тормозным импульсом 1702 восточного химического двигателя 221 малой тяги и импульсом 1704 западного химического двигателя 220 малой тяги в направлении движения по орбите, действует для компенсации составляющей Δе, созданной импульсом 1604 южного электрического двигателя 211 малой тяги.
Импульсы включения на прямом восхождении, равном 0°, и на прямом восхождении, равном 180°, как показано на фиг. 17, предназначены обеспечить ΔVtan, которая проходит вдоль оси Y. Могут быть случаи, когда химические двигатели 220-221 малой тяги слегка наклонены и не обеспечивают ΔVtan строго параллельно оси Y. В таких случаях, импульса включения могут быть смещены от прямого восхождения, равного 0°, и прямого восхождение, равного 180°, для компенсации угла наклона химических двигателей 220-221 малой тяги. Например, если восточный химический двигатель 221 малой тяги наклонен на 1°, то положение импульса включения восточного химического двигателя 221 малой тяги может быть смещено к прямому восхождению, равному 1°, для компенсации угла наклона двигателя малой тяги и обеспечения ΔVtan параллельно оси Y (т.е., отклонение составляет 1° от прямого восхождения, равного 0°). Аналогично, если западный химический двигатель 220 малой тяги наклонен на 2°, то импульс включения западного химического двигателя 220 малой тяги может быть смещено к прямому восхождению, равному 182°, для компенсации угла наклона двигателя малой тяги и обеспечения ΔVtan параллельно оси Y (т.е., отклонение составляет 2° от прямого восхождения, равного 180°). Смещение от прямого восхождения, равного 0°, и прямого восхождения, равного 180°, основано на углах наклонов химических двигателей малой тяги.
Маневры на 90° и 270° от импульса включения оставшегося электрического двигателя малой тяги способны компенсировать составляющую Δе, созданную импульсом включения оставшегося электрического двигателя малой тяги. В другом варианте осуществления импульса включения химических двигателей 220-221 малой тяги могут также использоваться для компенсации составляющей Δе, вызванной возмущениями, например, давлением солнечной радиации. Фиг. 18 представляет блок-схему, показывающую способ 1800 управления маневрами для удержания спутника на орбите по сценарию отказа в примерном варианте осуществления. Как и ранее, контроллер 120 орбиты обнаруживает, что отказал один северный электрический двигатель 210 малой тяги или южный электрический двигатель 211 малой тяги (этап 1802). В этом случае контроллер 120 орбиты определяет параметры маневров по сценарию отказа для компенсации наклонения орбитальной плоскости 408 и/или эксцентриситета, вызванного возмущениями. При определении параметров контроллер 120 орбиты может определить общую продолжительность импульса включения для компенсации наклонения орбитальной плоскости. Поскольку только один электрический двигатель малой тяги является работоспособным, общая продолжительность импульса включения применяется в отношении оставшегося электрического двигателя малой тяги, который является работоспособным. Импульс включения оставшегося электрического двигателя малой тяги в связанном с ним орбитальном узле (т.е. восходящем или нисходящем) является в основном достаточным для компенсации наклонения. В случае если импульса включения оставшегося электрического двигателя малой тяги недостаточно, управление наклонением может быть усилено с помощью либо северного, либо южного химического двигателя малой тяги 224-225 в связанном с ним орбитальном узле (т.е. восходящем или нисходящем). Контроллер 120 орбиты управляет импульсом включения оставшегося электрического двигателя малой тяги в связанном с ним орбитальном узле (этап 1804). Предположим для примера, что отказал северный электрический двигатель 210 малой тяги. Тогда контроллер 120 орбиты будет управлять импульсом включения южного электрического двигателя 211 малой тяги в нисходящем узле 414 (см. фиг. 16). Импульс включения оставшегося электрического двигателя малой тяги может выполняться каждый день или почти каждый день, исходя из необходимости управления наклонением.
Контроллер 120 орбиты может также определить, установить или оценить составляющую Δе, влияющую на орбиту спутника 100 и обусловленную возмущениями, например, давлением солнечной радиации (этап 1805). Как описано выше, направление вектора эксцентриситета, обусловленного давлением солнечной радиации, изменяется в зависимости от положения Солнца. Следовательно, контроллер 120 орбиты может оценить направление и величину вектора эксцентриситета, вызванного давлением солнечной радиации, в зависимости от времени года. Контроллер 120 орбиты управляет импульсом включения восточного химического двигателя 221 малой тяги в положении спутника 100 на орбите (этап 1806), создающим ΔVtan спутника 100. ΔVtan создает составляющую Δе вследствие импульса включения восточного химического двигателя 221 малой тяги. Контроллер 120 орбиты также управляет импульсом включения западного химического двигателя 220 малой тяги в положении спутника на орбите 100 (этап 1808), который создает ΔVtan спутника 100. ΔVtan создает составляющую Δе вследствие импульса включения западного химического двигателя 220 малой тяги. Контроллер 120 орбиты выбирает положения включений восточного химического двигателя 221 малой тяги и западного химического двигателя 220 малой тяги так, что их составляющие Δе компенсируют составляющую Δе, обусловленную импульсом включения оставшегося электрического двигателя малой тяги, и составляющую Δе, обусловленную возмущениями (этап 1810).
Импульсы включения химических двигателей 220-221 малой тяги, как описано выше, используют для компенсации изменений эксцентриситета. Если может использоваться только один электрический двигатель малой тяги, будет существовать остаточная составляющая Δе от импульса включения данного электрического двигателя малой тяги. Импульсы включения химических двигателей 220-221 малой тяги можно использовать для компенсации данной остаточной составляющей Δе. Импульсы включения химических двигателей малой тяги можно также использовать для компенсации составляющей Δе, вызванной возмущениями. Таким образом, контроллер 120 орбиты способен выбирать, когда включать химические двигатели 220-221 малой тяги для создания составляющих Δе (величины и направления), которые могут компенсировать остаточную составляющую Δе от импульса включения одиночного электрического двигателя малой тяги и/или составляющую Δe от возмущений.
Далее описаны различные импульсы включения химических двигателей 220-221 малой тяги для компенсации нежелательных составляющих Δе. Фиг. 19 показывает тормозной импульс восточного химического двигателя 221 малой тяги и импульс западного химического двигателя 220 малой тяги в направлении движения в примерном варианте осуществления. Импульс включения южного электрического двигателя 211 малой тяги снова создает составляющую Δе вдоль оси X (показана на фиг. 19 как ΔeELEc). Тормозной импульс 1902 восточного химического двигателя 221 малой тяги показан в виде смещения от прямого восхождения, равного 0° на +30° (прямое восхождение равно 30°). Тормозной импульс 1902 создает изменение (ΔVtan) скорости по касательной к направлению движения и в противоположном к нему направлении. Поскольку ΔVtan не совпадает с осью Y, ΔVtan создает составляющую Δе (показанную как ΔеснЕм-1), имеющую x-составляющую (ex) и y-составляющую (ey). Импульс 1904 западного химического двигателя 220 малой тяги в направлении вращения по орбите показан как смещение от прямого восхождения, равного 180° на +30° (прямое восхождение равно 210°). Импульс 1904 в направлении вращения по орбите создает другое изменение (ΔVtan) скорости, касательное к направлению движения спутника 100 и имеющее то же направление. Поскольку ΔVtan не совпадает с осью Y, ΔVtan создает составляющую Δе (показанную как ΔснЕм-2), имеющую x-составляющую и y-составляющую. Составляющая Δе, созданная тормозным импульсом 1902 восточного химического двигателя 221 малой тяги, составляющая Δе, созданная импульсом 1904 западного химического двигателя 220 малой тяги в направлении вращения по орбите, и составляющая Δе, созданная импульсом 1604 южного электрического двигателя 211 малой тяги (см. фиг. 16), суммируются, создавая общий или целевой Δе для трех маневров. В данном примере составляющая Δе, обусловленная возмущениями, является нежелательной составляющей.
Фиг. 20 показывает целевой Δе для трех маневров в примерном варианте осуществления. При суммировании ΔснЕм-1, ΔснЕм-2 и ΔELEc возникает целевой вектор Δе, который может использоваться для компенсации возмущения. Например, для нейтрализации эксцентриситета, вызванного Солнцем, маневры могут создавать целевой Δе, указывающий на около 90° за Солнцем. Целевой Δе указывает в направлении, противоположном вектору эксцентриситета, вызванного Солнцем. Так как положение Солнца изменяется в течение года, контроллер 120 орбиты может корректировать выполнение маневров для удержания спутника на орбите так, что целевой Δе продолжает указывать на около 90° за Солнцем.
Другой путь рассмотрения упомянутой выше концепции заключается в том, что обе, и составляющая Δе от возмущений, и составляющая Δе от импульса включения южного электрического двигателя 211 малой тяги, являются нежелательными составляющими. Следовательно, импульсы включения химических двигателей 220-221 малой тяги можно расположить так, что результирующие составляющие Δе данных включений могут уравновешивать составляющие Δе от импульса включения электрического двигателя малой тяги и возмущений.
Фиг. 21 показывает тормозной импульс восточного химического двигателя 221 малой тяги и импульс западного химического двигателя 220 малой тяги в направлении движения в примерном варианте осуществления. В данном примере импульс включения южного электрического двигателя 211 малой тяги создает составляющую Δе вдоль оси X (показано на фиг. 21 как ΔELEc). Тормозной импульс 2102 восточного химического двигателя 221 малой тяги показан в виде смещения от прямого восхождения, равного 0° на -20° (прямое восхождение равно 340°). Тормозной импульс создает изменение (ΔVtan) скорости по касательной к направлению движения и в противоположном к нему направлении. ΔVtan создает составляющую Δе (показанную как ΔcHEM-1), имеющую x-составляющую и y-составляющую. Импульс 2104 в направлении движения по орбите западного химического двигателя 220 малой тяги показан в виде смещения от прямого восхождения, равного 180° на -20° (прямое восхождение равно 160°). Импульс 2104 в направлении движения по орбите создает другое изменение (ΔVtan) скорости по касательной и в направлении движения спутника 100. ΔVtan создает составляющую Δе (показанную как ΔснЕм-2), имеющую x-составляющую и y-составляющую. Составляющая Δе, созданная импульсом 2102 торможения восточного химического двигателя 221 малой тяги, составляющая Δе, созданная импульсом 2104 в направлении вращения по орбите западным химическим двигателем малой тяги 220 малой тяги, и Δе, созданная импульсом 1604 (см. фиг. 16) южного электрического двигателя 211 малой тяги, суммируются, создавая общий или целевой Δе для трех маневров. В данном случае, составляющая Δе от возмущений является нежелательной составляющей. Импульс включения южного электрического двигателя 211 малой тяги и импульсы включения химических двигателей 220-221 малой тяги способны уравновесить составляющую Δе, обусловленную возмущениями.
Как можно увидеть из фиг. 19-21, импульсы включения химических двигателей 220-221 малой тяги могут выполняться в различных точках орбиты спутника 100 для создания целевого Δе даже в случае отказа одного из электрических двигателей 210-211 малой тяги. В результате контроллер 120 орбиты может компенсировать эксцентриситет, вызванный возмущениями и удерживать спутник 100 в своей зоне. В данном примере спутник 100 является работоспособным даже в случае отказа электрического двигателя малой тяги.
Любой из различных элементов, показанных на фигурах или описанных в данном документе, может быть реализован в виде аппаратных средств, программного обеспечения, программно-аппаратных средств или их комбинации. Например, элемент может быть реализован в виде специализированного аппаратного средства. Специализированные элементы аппаратных средств могут называться "процессорами", "контроллерами" или некоторыми подобными терминами. Функции, обеспеченные процессором, могут обеспечиваться одним выделенным процессором, одним специализированным процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование терминов "процессор" или "контроллер" не следует истолковывать, как ссылку исключительно на аппаратные средства, способные выполнять программы, и может неявно включать в себя, без ограничения, цифровой сигнальный процессор (DSP), сетевой процессор, специализированную интегральную микросхему (ASIC) или другие микросхемы, программируемую логическую матрицу (FPGA), постоянное запоминающее устройство (ROM) для хранения программного обеспечения, оперативное запоминающее устройство (RAM), энергонезависимую память, логическую часть или какой-либо другой физический аппаратный компонент или модуль.
Кроме того, элемент может быть реализован в виде команд, исполняемых процессором или компьютером, для выполнения функций элемента. Некоторые примеры команд являются программным обеспечением, программным кодом и программно-аппаратными средствами. Команды являются функциональными, если они исполняются, предписывая процессору выполнять функции элемента. Команды могут храниться на устройствах хранения данных, которые могут считываться процессором. Некоторые примеры запоминающих устройств представляют собой цифровые или твердотельные элементы памяти, магнитные носители информации, например, магнитные диски и магнитные ленты, жесткие диски или оптически считываемые цифровые носители данных.
Кроме того, изобретение включает в себя варианты осуществления в соответствии со следующими пунктами:
Пункт 1. Устройство, содержащее:
контроллер орбиты, выполненный с возможностью управления маневрами для удержания спутника на орбите, при этом спутник содержит:
спутниковую платформу, имеющую сторону надира, выполненную с возможностью быть обращенной к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника;
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; и
контроллер орбиты выполнен с возможностью обнаружения отказа одного из электрических двигателей малой тяги и в случае отказа:
- управления импульсом включения оставшегося электрического двигателя малой тяги вблизи орбитального узла;
- управления импульсом включения одного из химических двигателей малой тяги на 90°±5° от импульса включения оставшегося электрического двигателя малой тяги; и
- управления импульсом включения другого из химических двигателей малой тяги на 270°±5° от импульса включения оставшегося электрического двигателя малой тяги.
Пункт 2. Устройство по пункту 1, в котором:
импульс включения оставшегося электрического двигателя малой тяги создает изменение радиальной скорости спутника, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
импульс включения одного химического двигателя малой тяги на 90°±5° создает первое изменение тангенциальной скорости спутника, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги; и
импульс включения другого химического двигателя малой тяги на 270°±5° создает второе изменение тангенциальной скорости спутника, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги;
при этом составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения химических двигателей малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги.
Пункт 3. Устройство по пункту 1, в котором:
контроллер орбиты выполнен с возможностью обнаружения отказа северного электрического двигателя малой тяги и управления импульсом включения южного электрического двигателя малой тяги вблизи нисходящего узла;
контроллер орбиты выполнен с возможностью управления тормозным импульсом восточного химического двигателя малой тяги на 90°±5° от импульса включения южного электрического двигателя малой тяги и управления импульсом в направлении движения для западного химического двигателя малой тяги на 270°±5° от импульса включения южного электрического двигателя малой тяги.
Пункт 4. Устройство по пункту 1, в котором:
контроллер орбиты выполнен с возможностью обнаруживать отказ южного электрического двигателя малой тяги и управлять импульсом включения северного электрического двигателя малой тяги вблизи восходящего узла; и
контроллер орбиты выполнен с возможностью управления тормозным импульсом восточного химического двигателя малой тяги на 90°±5° от импульса включения северного электрического двигателя малой тяги и управления импульсом в направлении движения для западного химического двигателя малой тяги на 270°±5° от импульса включения северного электрического двигателя малой тяги.
Пункт 5. Устройство по пункту 1, в котором:
северный электрический двигатель малой тяги сориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35°±25°; и
южный электрический двигатель малой тяги сориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35°±25°.
Пункт 6. Устройство по пункту 5, в котором:
северный электрический двигатель малой тяги установлен на карданном подвесе;
южный электрический двигатель малой тяги установлен на карданном подвесе; и
контроллер орбиты выполнен с возможностью коррекции первого угла северного электрического двигателя малой тяги и коррекции второго угла южного электрического двигателя малой тяги.
Пункт 7. Устройство по пункту 5, в котором:
северный электрический двигатель малой тяги закреплен под первым углом; и
южный электрический двигатель малой тяги закреплен под вторым углом.
Пункт 8. Способ управления маневрами для удержания спутника на орбите, в котором спутник содержит
спутниковую платформу, имеющую сторону надира и сторону зенита,
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника,
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника,
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, при этом способ включает:
обнаружение отказа одного из электрических двигателей малой тяги и в случае отказа,
- управление импульсом включения оставшегося электрического двигателя малой тяги вблизи орбитального узла;
- управление импульсом включения одного из химических двигателей малой тяги на 90°±5° от импульса включения оставшегося электрического двигателя малой тяги; и
- управление импульсом включения другого из химических двигателей малой тяги на 270°±5° от импульса включения оставшегося электрического двигателя малой тяги.
Пункт 9. Способ по п. 8, в котором:
импульсом включения оставшегося электрического двигателя малой тяги создают изменение радиальной скорости спутника, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
импульсом включения одного из химических двигателей малой тяги на 90°±5° создают первое изменение тангенциальной скорости спутника, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги; и
импульсом включения другого химического двигателя малой тяги на 270°±5° создают второе изменение тангенциальной скорости спутника, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги;
при этом составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения химических двигателей малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги.
Пункт 10. Способ по пункту 8, в котором управлениями импульсом включения включает в себя:
обнаружение отказа северного электрического двигателя малой тяги;
управление импульсом включения южного электрического двигателя малой тяги вблизи нисходящего узла;
управление тормозным импульсом восточного химического двигателя малой тяги на 90°±5° от импульса включения южного электрического двигателя малой тяги; и
управление импульсом в направлении движения для западного химического двигателя малой тяги на 270°±5° от импульса включения южного электрического двигателя малой тяги.
Пункт 11. Способ по пункту 8, в котором управление импульсами включения включает в себя:
обнаружение отказа южного электрического двигателя малой тяги;
управление импульсом включения северного электрического двигателя малой тяги вблизи восходящего узла;
управление тормозным импульсом восточного химического двигателя малой тяги на 90°±5° от импульса включения северного электрического двигателя малой тяги; и
управление импульсом в направлении движения для западного химического двигателя малой тяги на 270°±5° от импульса включения северного электрического двигателя малой тяги.
Пункт 12. Устройство, содержащее:
контроллер орбиты, выполненный с возможностью управления маневрами для удержания на орбите спутника, содержащего:
спутниковую платформу, имеющую сторону надира, выполненную с возможностью быть обращенной к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника;
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; при этом
контроллер орбиты выполнен с возможностью обнаруживать отказ одного из электрических двигателей малой тяги и в случае отказа:
управлять импульсом включения вблизи орбитального узла оставшегося электрического двигателя малой тяги, создающего изменение радиальной скорости спутника, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
определять составляющую вектора дельта-эксцентриситета, обусловленную возмущениями, влияющими на орбиту спутника;
управлять импульсом включения восточного химического двигателя малой тяги, создающего первое изменение тангенциальной скорости спутника в первом положении спутника на орбите, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения восточного химического двигателя малой тяги; и
управлять импульсом включения западного химического двигателя малой тяги, создающего второе изменение тангенциальной скорости спутника во втором положении спутника на орбите, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения западного химического двигателя малой тяги;
причем контроллер орбиты выполнен с возможностью выбирать первое положение импульса включения восточного химического двигателя малой тяги и второе положение импульса включения западного химического двигателя малой тяги так, что составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения восточного химического двигателя малой тяги, и составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения западного химического двигателя малой тяги компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги и составляющую вектора дельта-эксцентриситета, обусловленную влиянием возмущений.
Пункт 13. Устройство по пункту 12, в котором:
контроллер орбиты выполнен с возможностью определять положение Солнца в зависимости от времени года и определять составляющую вектора дельта-эксцентриситета, обусловленную влиянием возмущений в зависимости от положения Солнца.
Пункт 14. Устройство по пункту 12, в котором:
северный электрический двигатель малой тяги сориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35°±25°; и
южный электрический двигатель малой тяги сориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35°±25°.
Пункт 15. Устройство по пункту 14, в котором:
северный электрический двигатель малой тяги установлен на карданном подвесе;
южный электрический двигатель малой тяги установлен на карданном подвесе; и
контроллер орбиты выполнен с возможностью коррекции первого угла северного электрического двигателя малой тяги и коррекции второго угла южного электрического двигателя малой тяги.
Пункт 16. Устройство по пункту 14, в котором:
северный электрический двигатель малой тяги закреплен под первым углом; и
южный электрический двигатель малой тяги закреплен под вторым углом.
Пункт 17. Способ управления маневрами для удержания спутника на орбите, в котором спутник содержит
спутниковую платформу, имеющую сторону надира и сторону зенита,
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника,
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника,
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, при этом способ включает:
обнаружение отказа одного из электрических двигателей малой тяги и в случае отказа:
управление импульсом включения оставшегося электрического двигателя малой тяги, создающего изменение радиальной скорости спутника вблизи орбитального узла, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
определение составляющей вектора дельта-эксцентриситета, обусловленной возмущениями, влияющими на орбиту спутника;
управление импульсом включения восточного химического двигателя малой тяги, создающего первое изменение тангенциальной скорости спутника, в первом положении спутника на орбите, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения восточного химического двигателя малой тяги; и
управление импульсом включения западного химического двигателя малой тяги, создающего второе изменение тангенциальной скорости спутника во втором положении спутника на орбите, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения западного химического двигателя малой тяги;
при этом первое положение импульса включения восточного химического двигателя малой тяги и второе положение импульса включения западного химического двигателя малой тяги выбирают так, что составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения восточного химического двигателя малой тяги, и составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения западного химического двигателя малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги, и составляющую вектора дельта-эксцентриситета, обусловленную влиянием возмущений.
Пункт 18. Способ по пункту 17, дополнительно включающий:
определение положения Солнца в зависимости от времени года; и
определение составляющей вектора дельта-эксцентриситета, обусловленной влиянием возмущений в зависимости от положения Солнца.
Хотя в данном документе были описаны конкретные варианты осуществления изобретения, объем не ограничивается данными конкретными вариантами осуществления. Скорее, объем определяется следующей формулой изобретения и любыми ее эквивалентами.
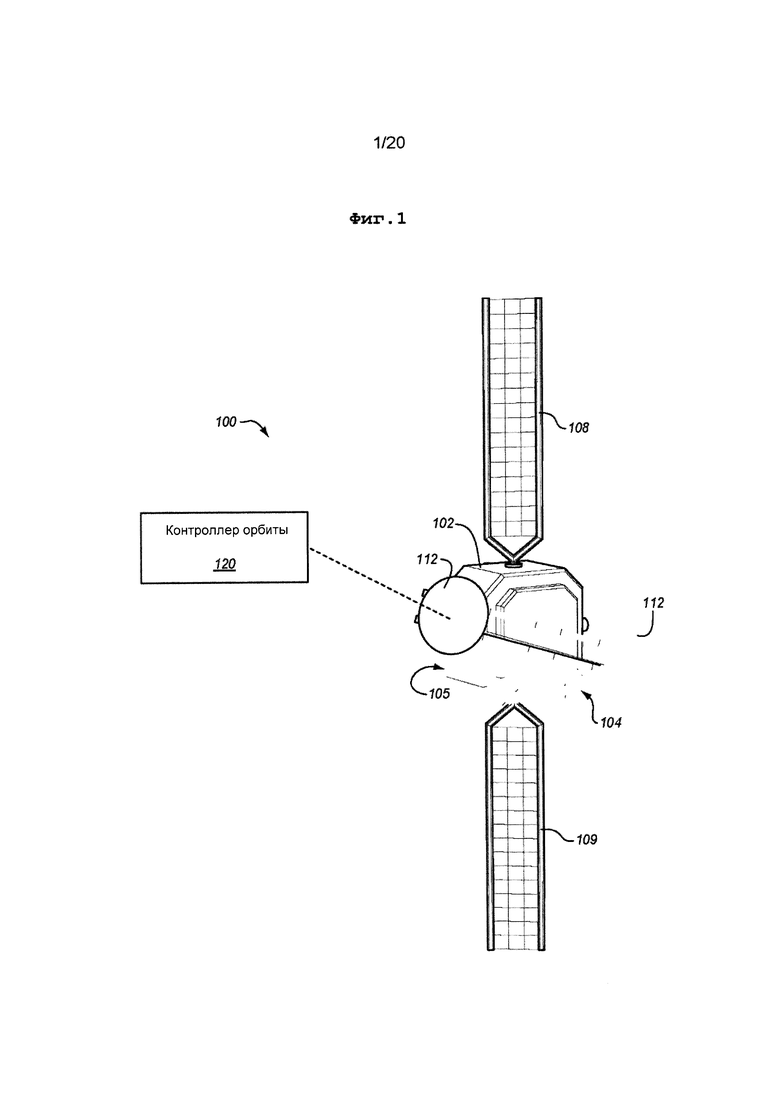
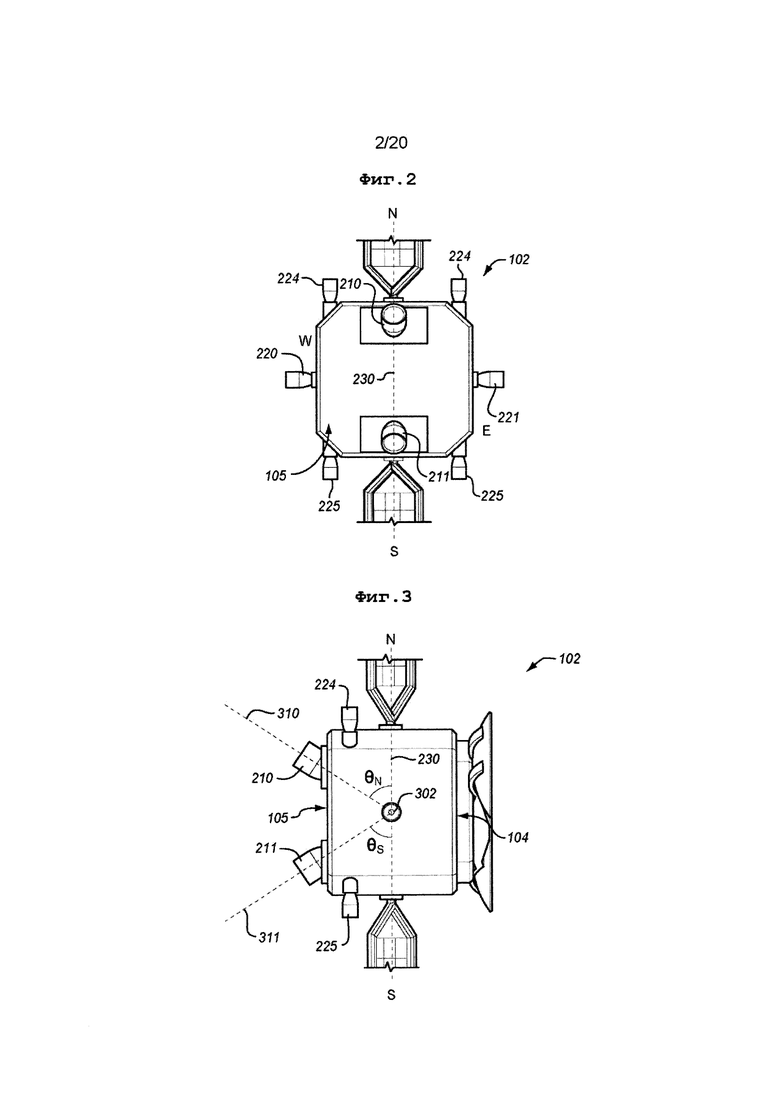
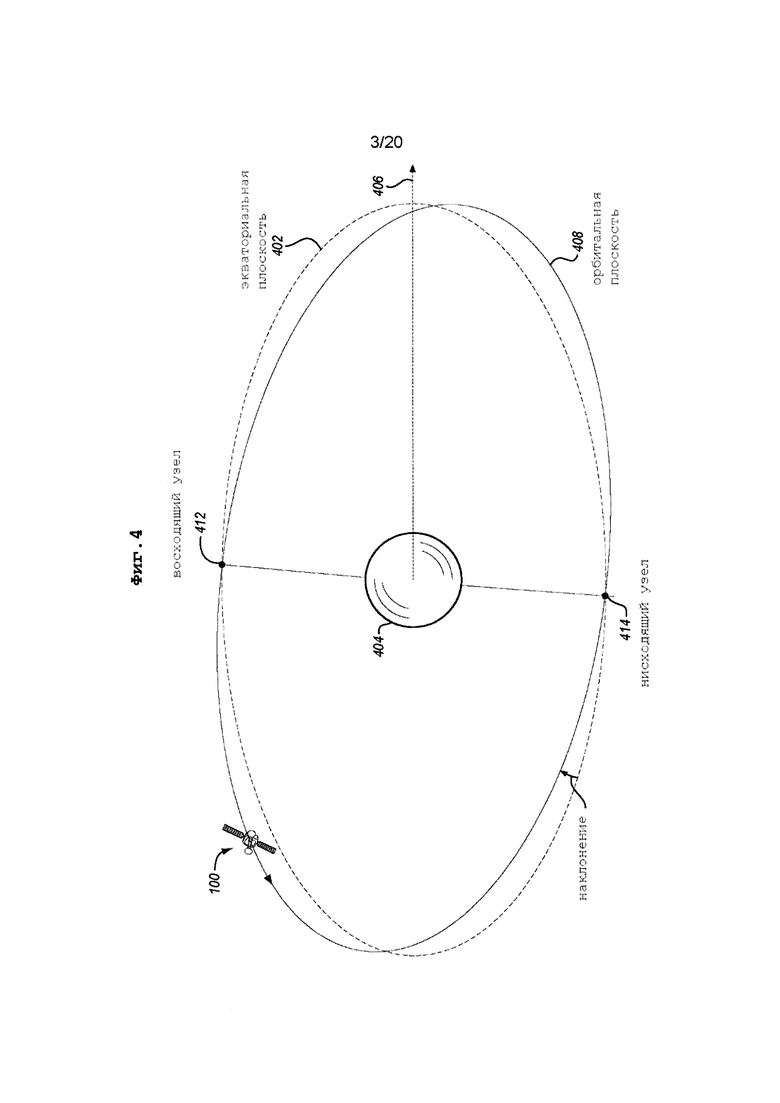
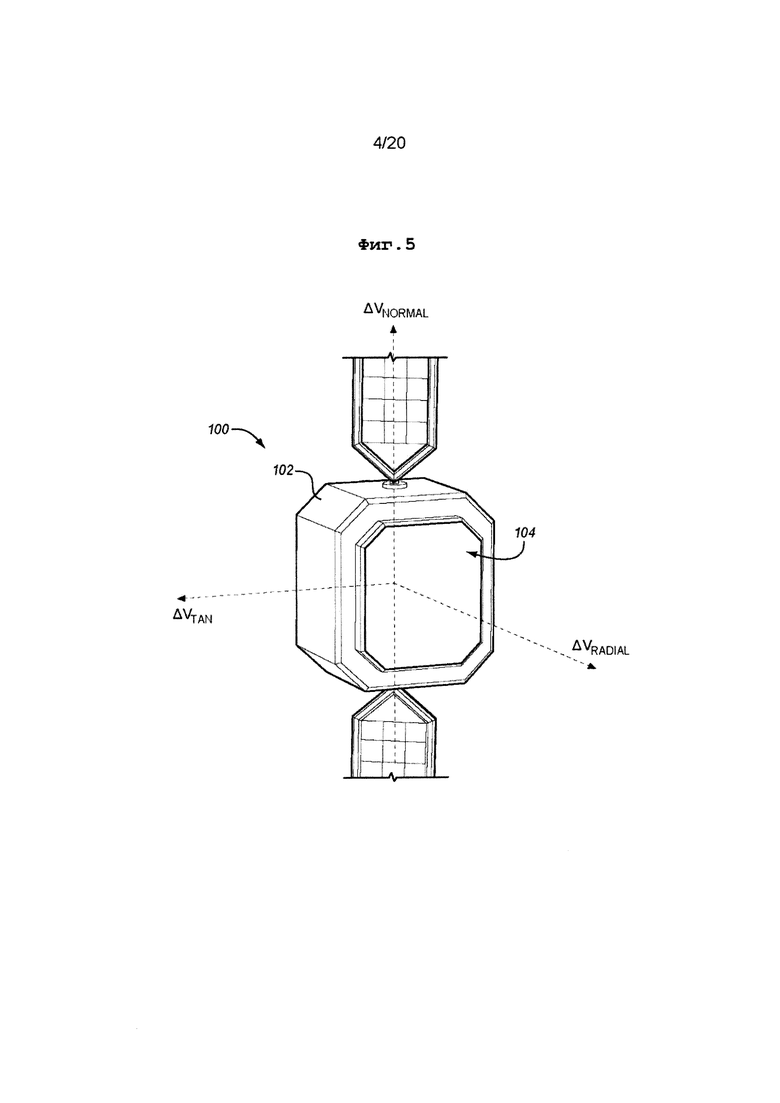
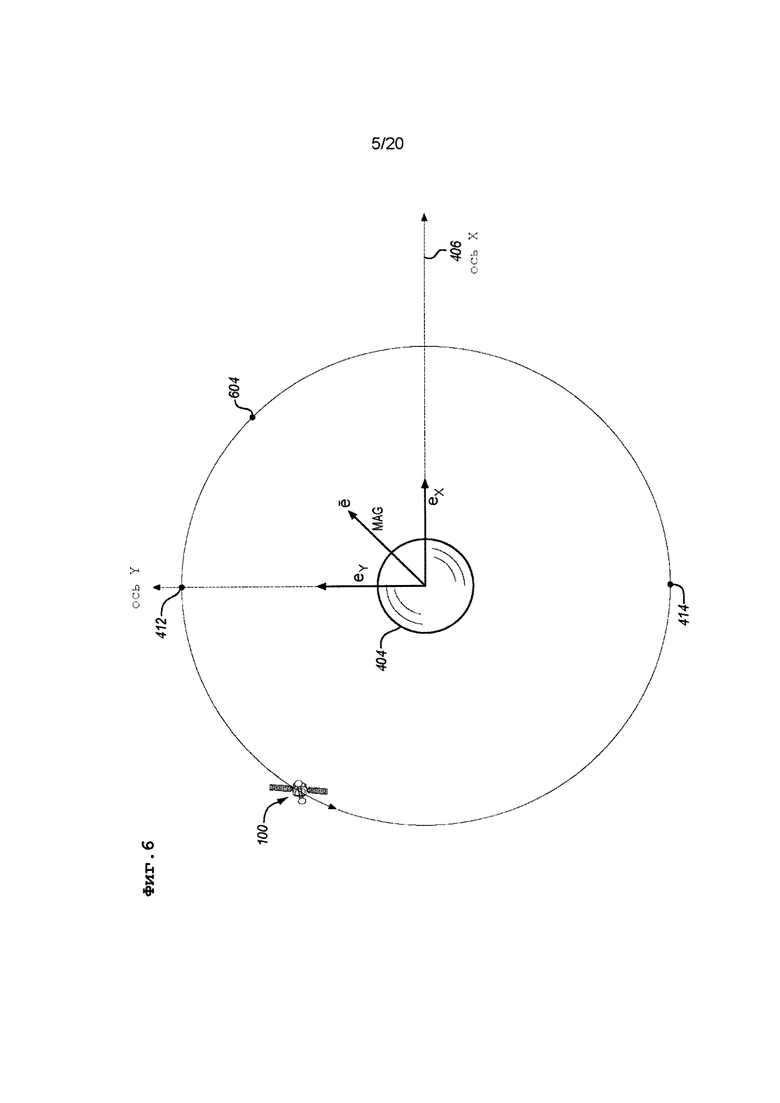
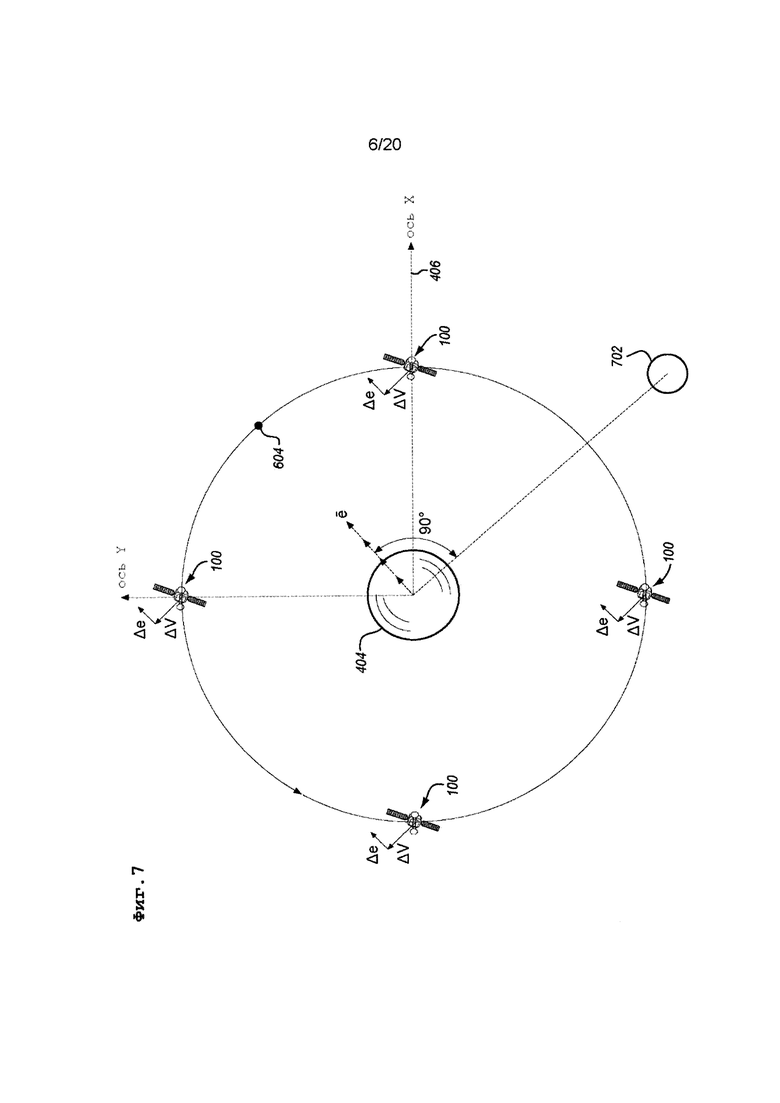
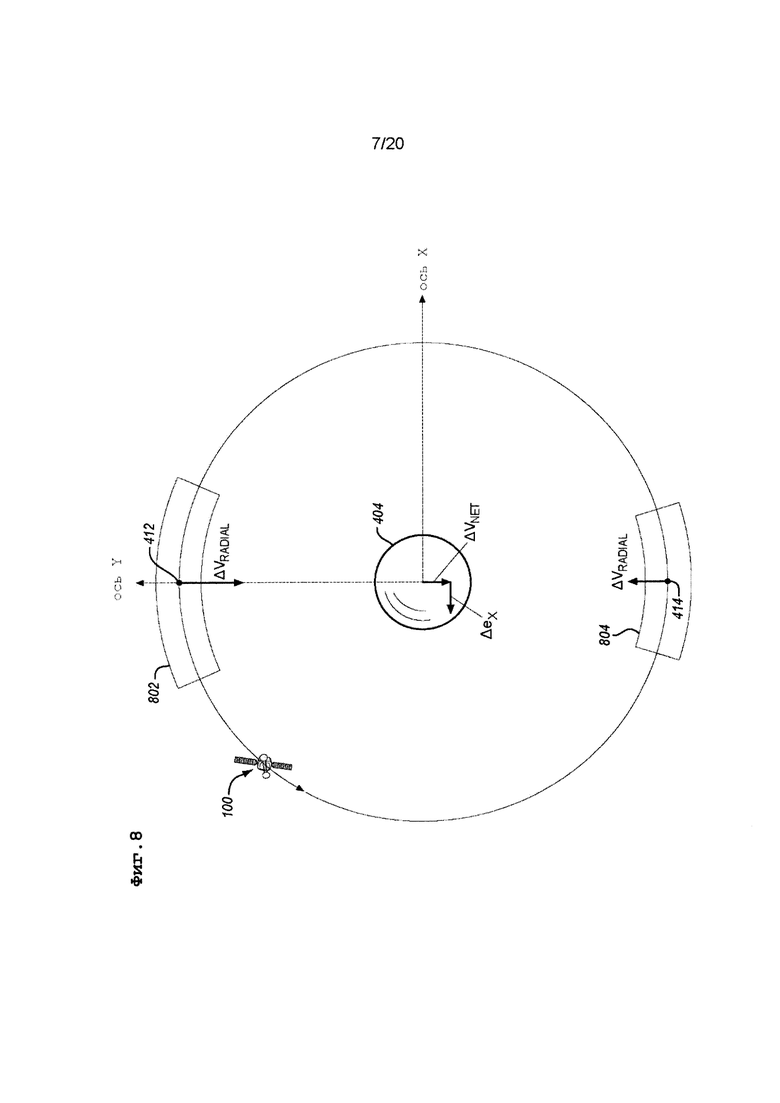
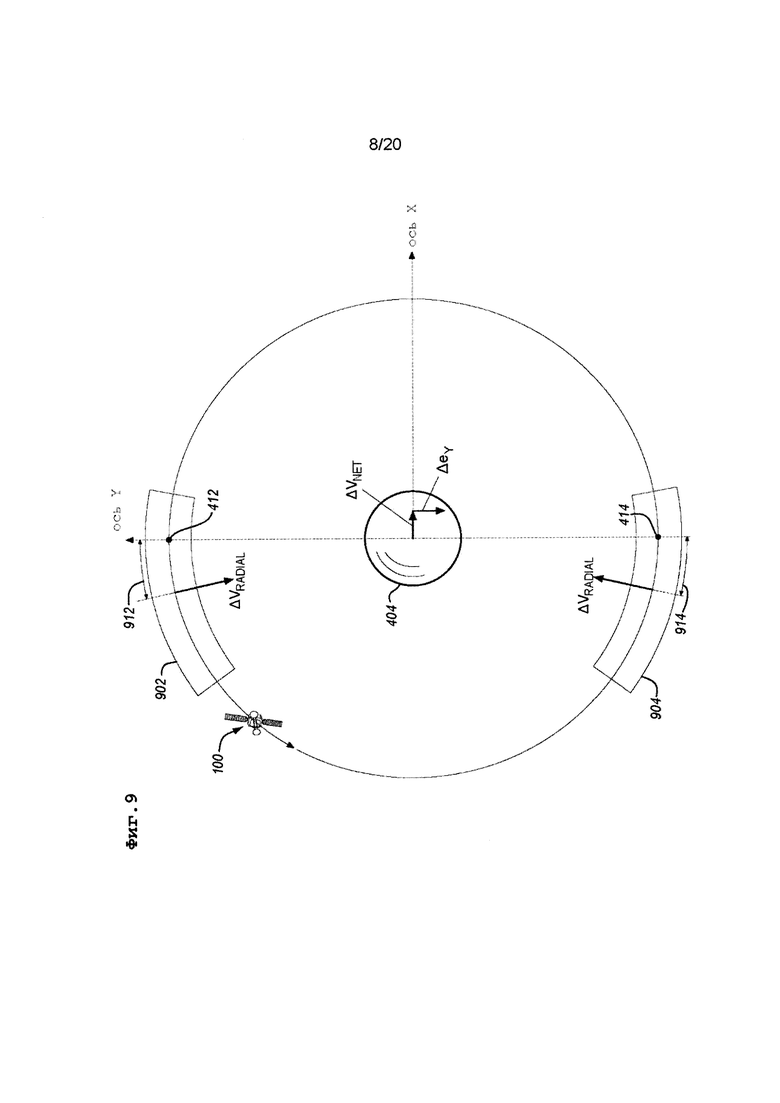
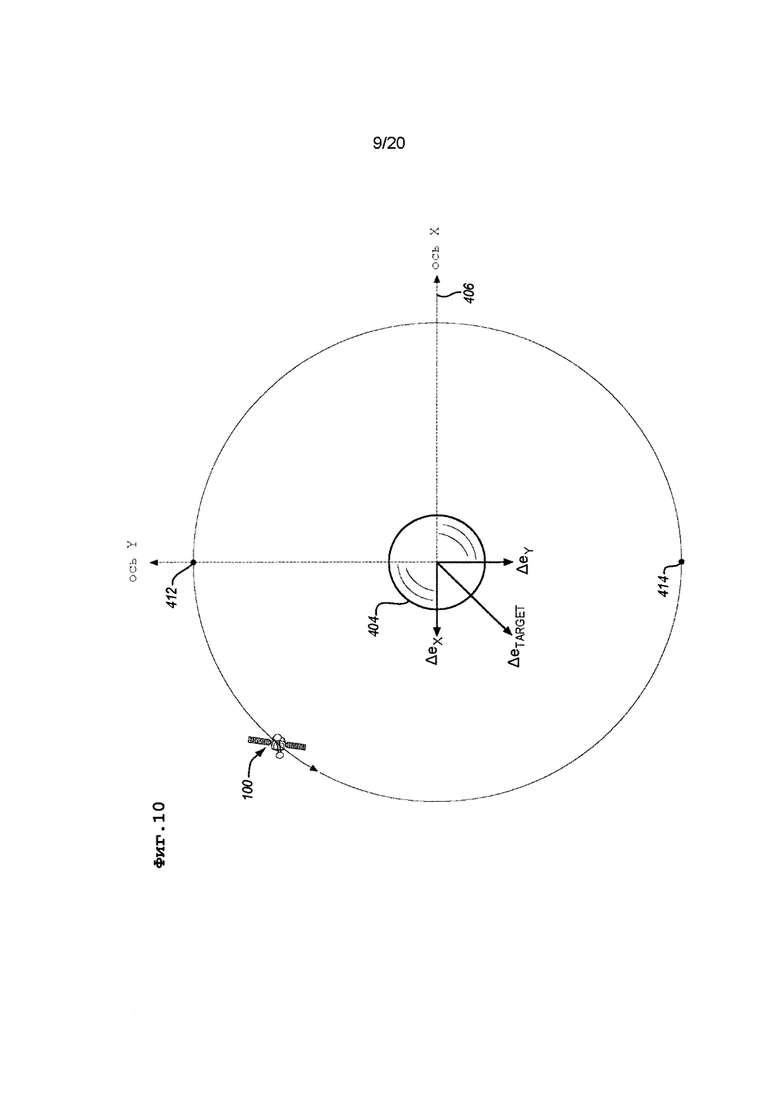
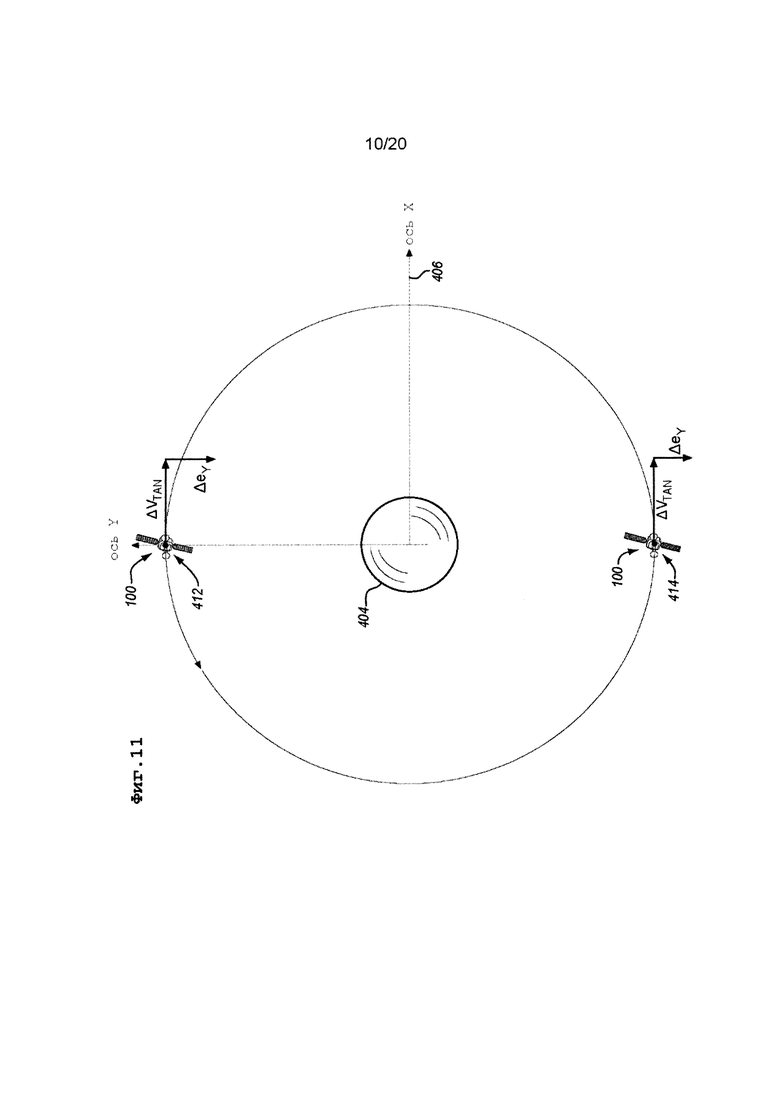
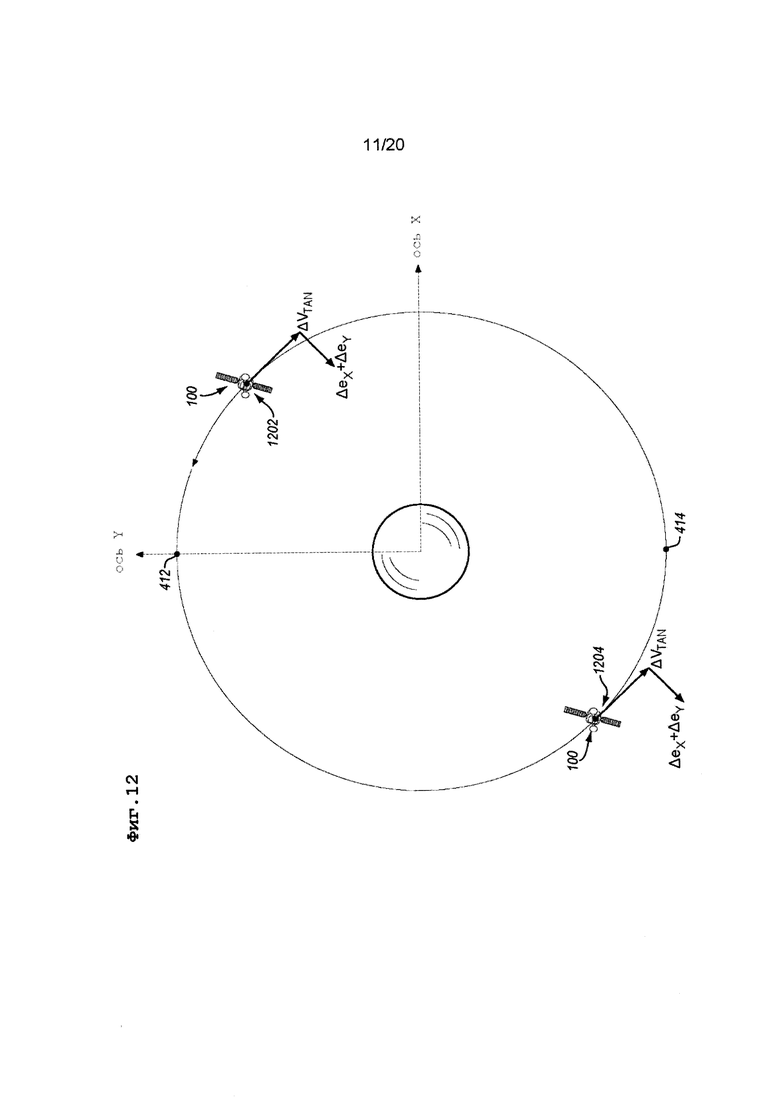
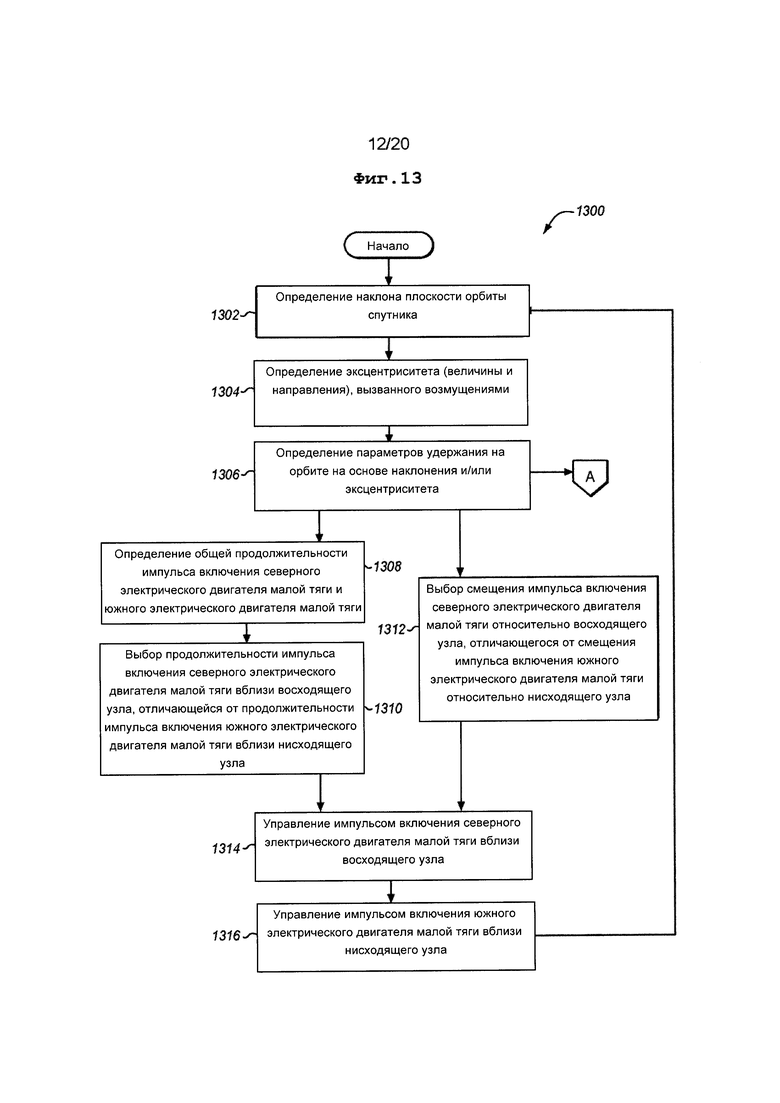
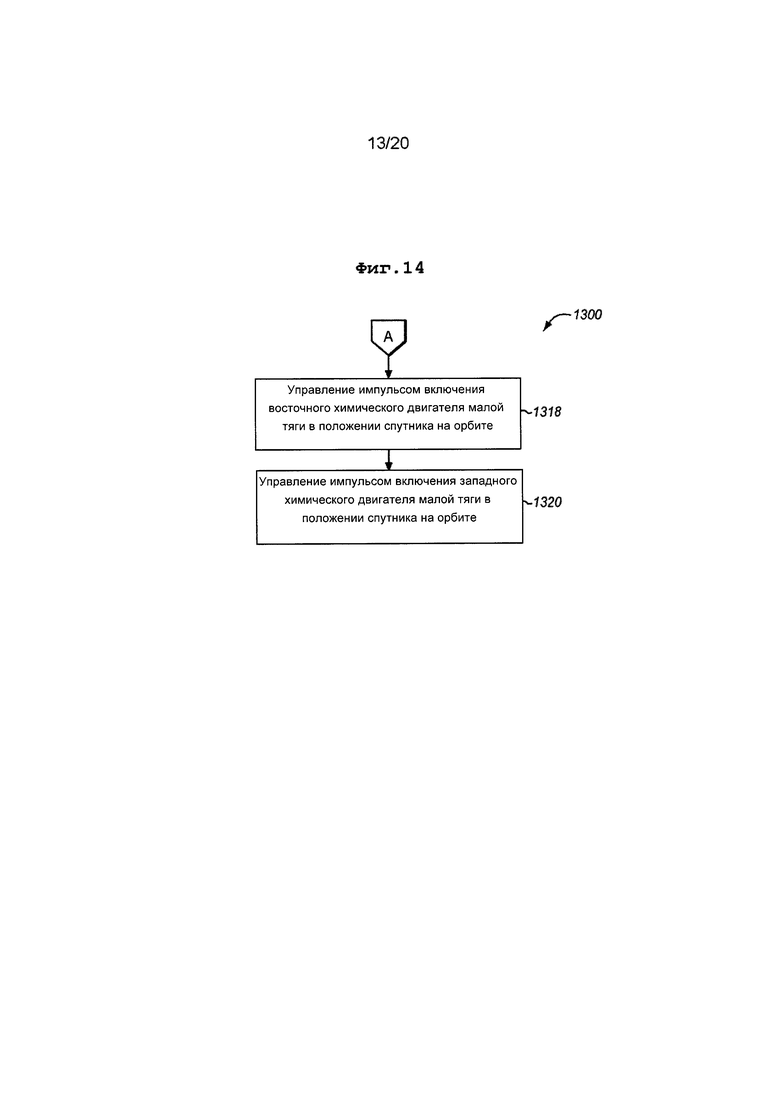
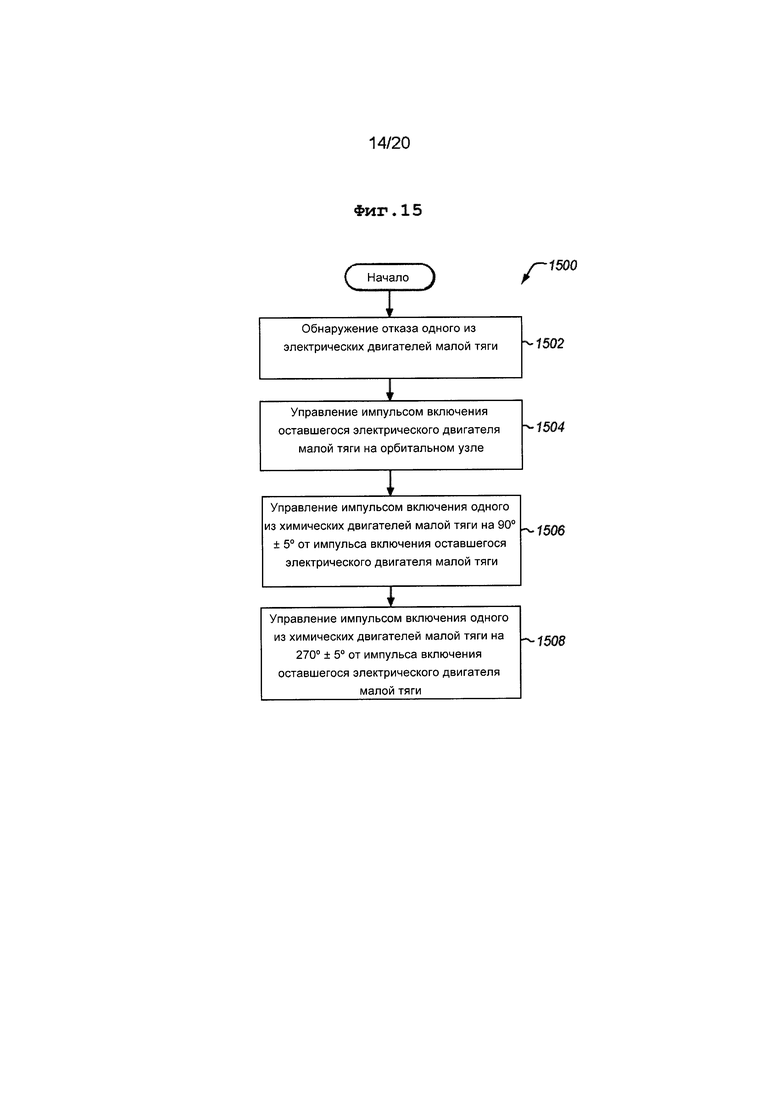
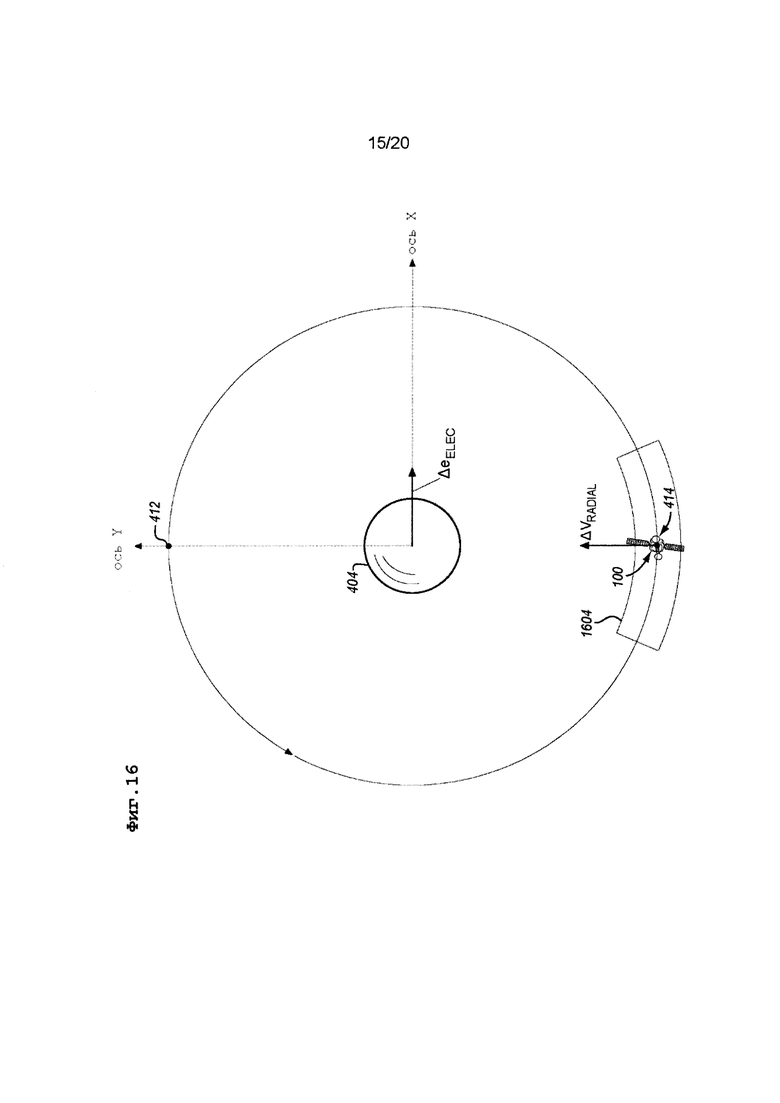
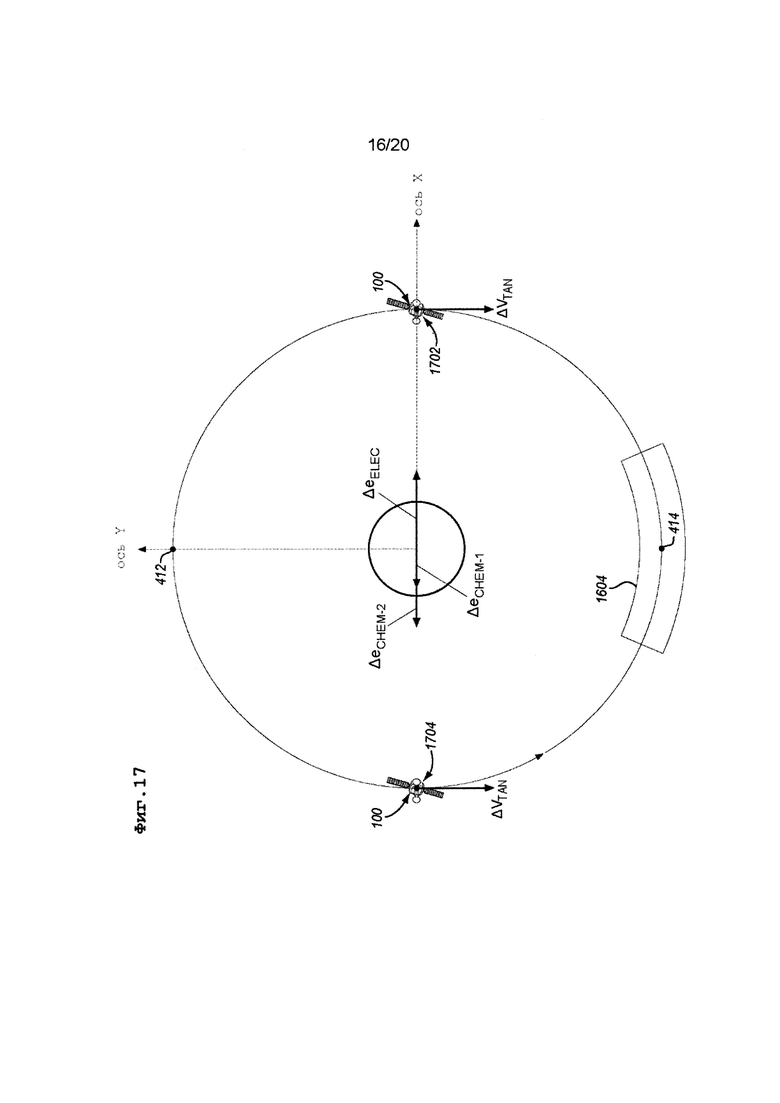
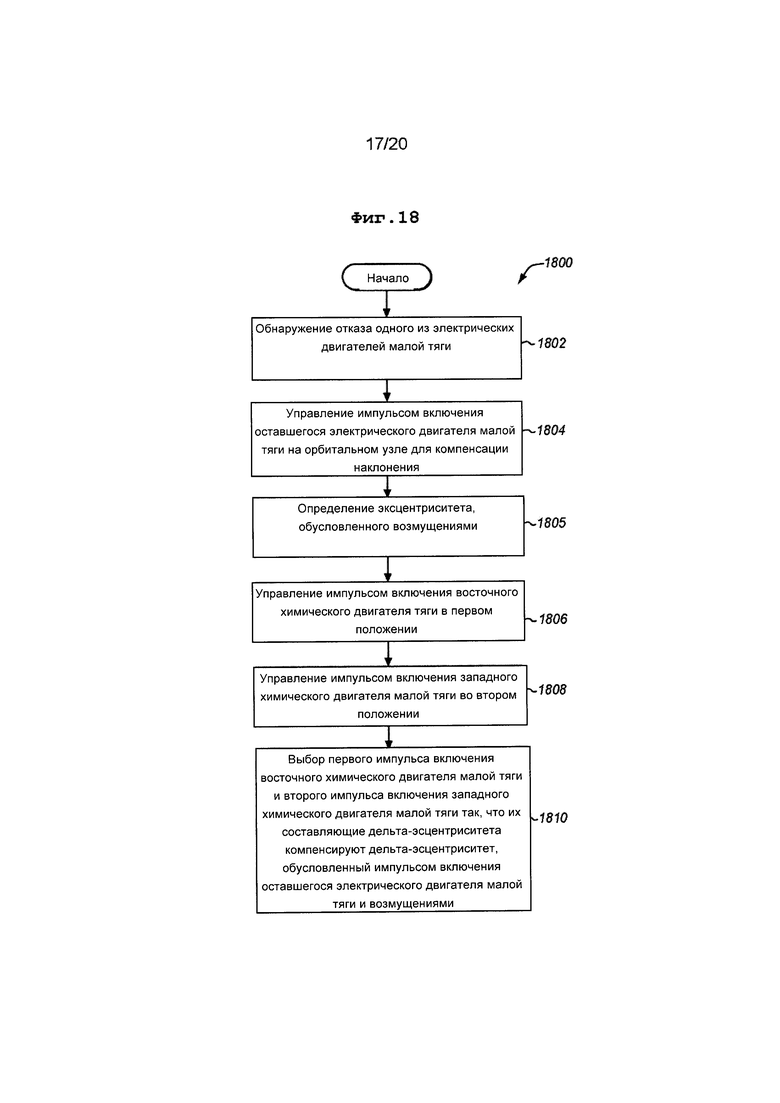
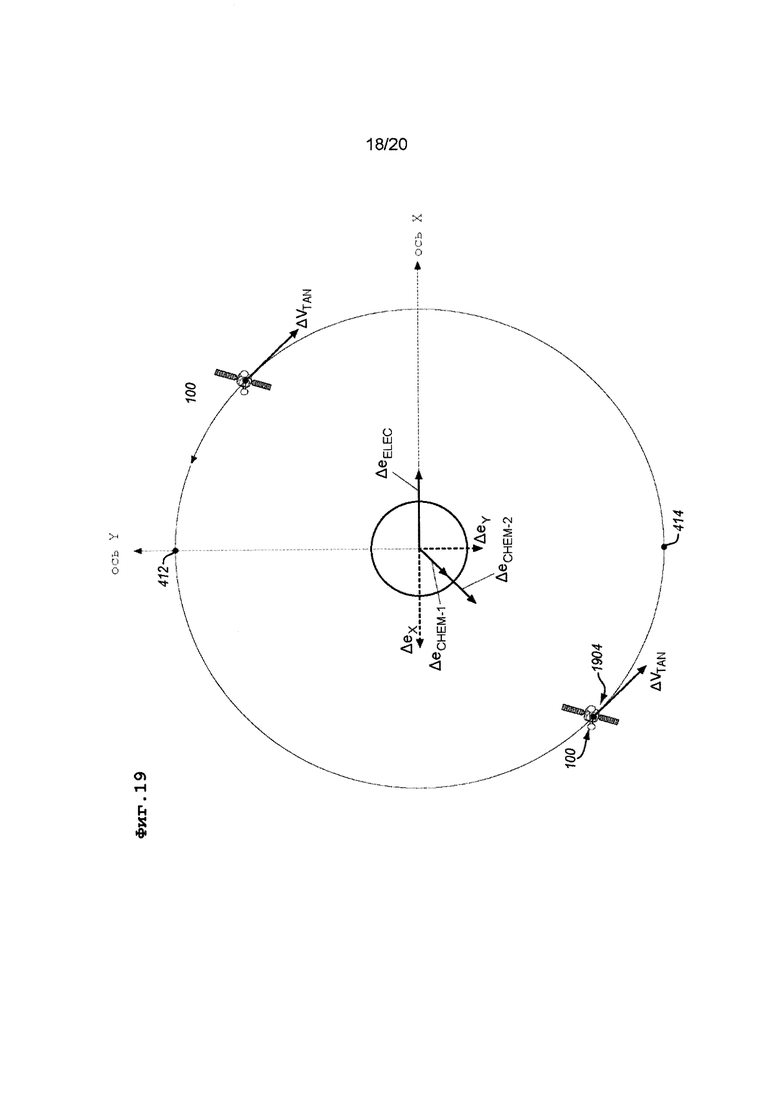
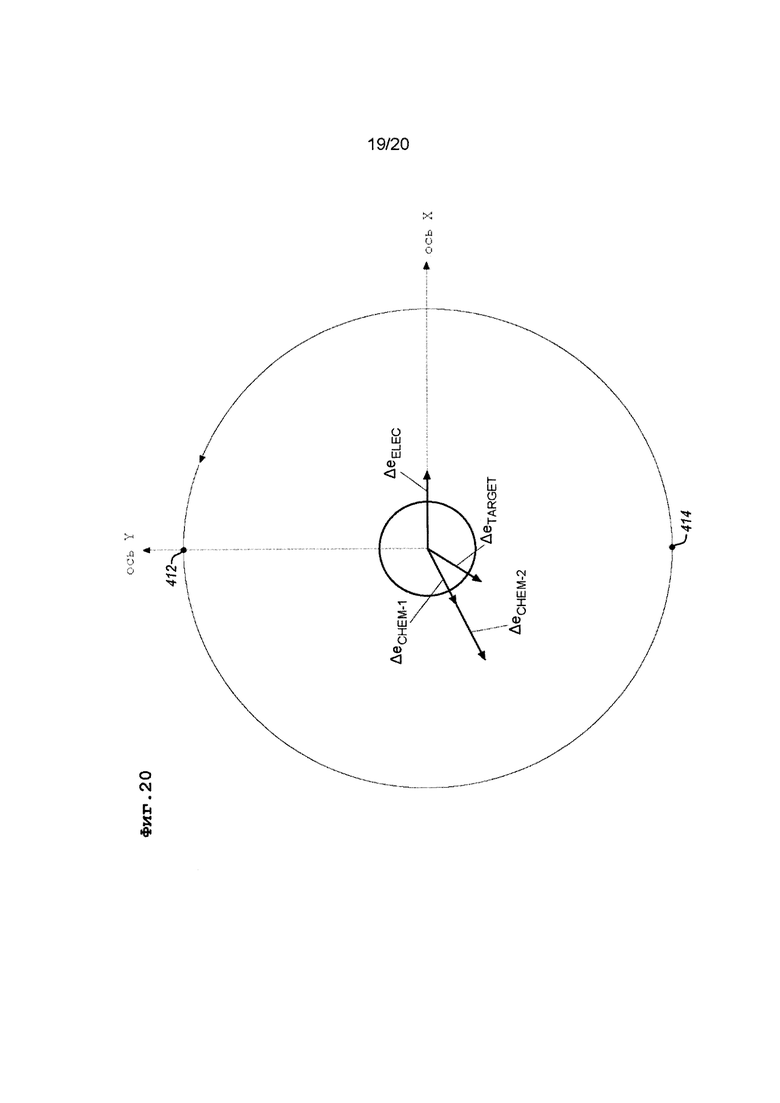
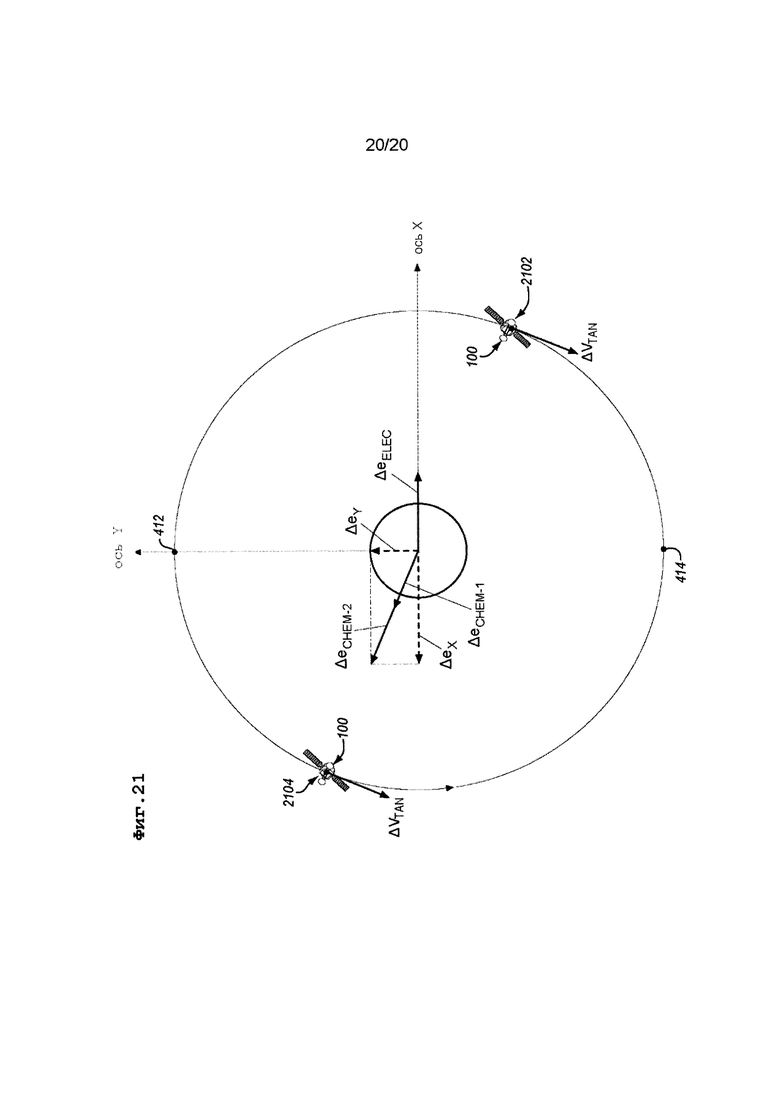
Устройство и способы удержания спутника на орбите. Спутник содержит северный электрический двигатель малой тяги и южный электрический двигатель малой тяги, установленные на стороне зенита, восточный химический двигатель малой тяги, установленный на восточной стороне, и западный химический двигатель малой тяги, установленный на западной стороне. Контроллер орбиты обнаруживает отказ одного из электрических двигателей малой тяги. В случае отказа контроллер орбиты управляет импульсом включения оставшегося электрического двигателя малой тяги вблизи орбитального узла. Контроллер орбиты управляет импульсом включения одного из химических двигателей малой тяги на 90±5° от импульса включения оставшегося электрического двигателя малой тяги и управляет импульсом включения еще одного из химических двигателей малой тяги на 270±5° от импульса включения оставшегося электрического двигателя малой тяги. 4 н. и 14 з.п. ф-лы, 21 ил.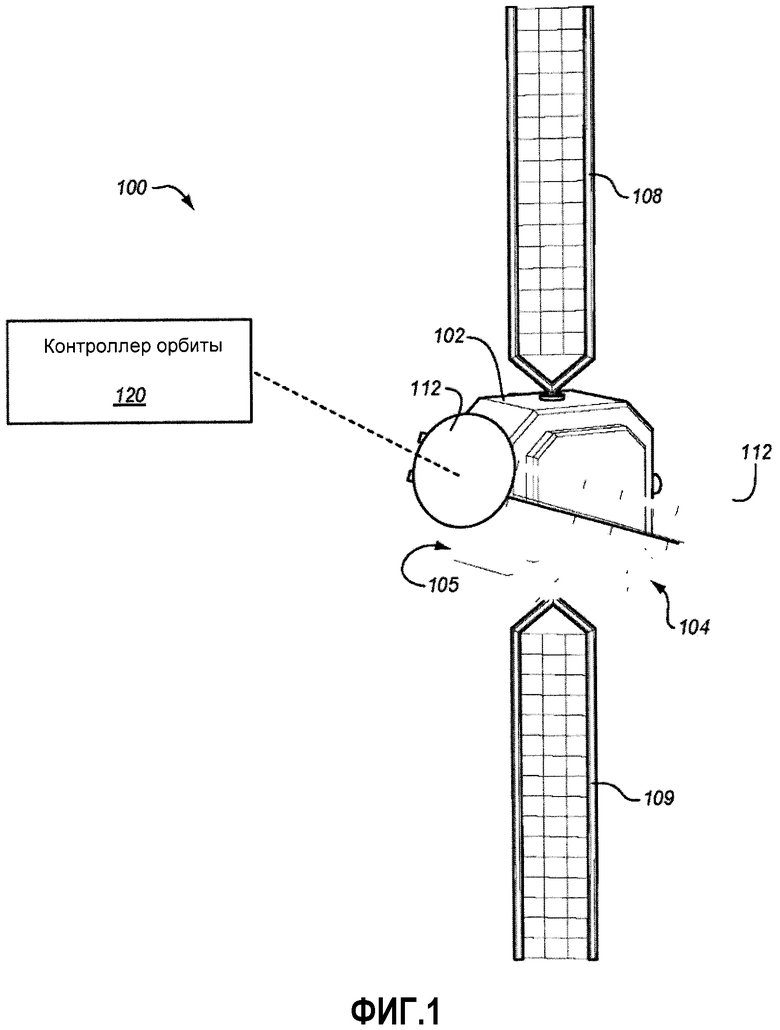
1. Устройство управления маневрами для удержания спутника на орбите, содержащее:
контроллер орбиты, выполненный с возможностью управления маневрами для удержания на орбите спутника, содержащего:
спутниковую платформу, имеющую сторону надира, выполненную с возможностью быть обращенной к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника;
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; при этом
контроллер орбиты выполнен с возможностью обнаружения отказа одного из электрических двигателей малой тяги и в случае отказа:
- управления импульсом включения оставшегося электрического двигателя малой тяги вблизи орбитального узла;
- управления импульсом включения одного из химических двигателей малой тяги на 90±5° от импульса включения оставшегося электрического двигателя малой тяги; и
- управления импульсом включения другого из химических двигателей малой тяги на 270±5° от импульса включения оставшегося электрического двигателя малой тяги.
2. Устройство по п. 1, в котором:
импульс включения оставшегося электрического двигателя малой тяги создает изменение радиальной скорости спутника, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
импульс включения одного химического двигателей малой тяги на 90±5° создает первое изменение тангенциальной скорости спутника, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги; и
импульс включения другого химического двигателя малой тяги на 270±5° создает второе изменение тангенциальной скорости спутника, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги; и
при этом составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения химических двигателей малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги.
3. Устройство по п. 1, в котором:
контроллер орбиты выполнен с возможностью обнаружения отказа северного электрического двигателя малой тяги и управления импульсом включения южного электрического двигателя малой тяги вблизи нисходящего узла; и
контроллер орбиты выполнен с возможностью управления тормозным импульсом восточного химического двигателя малой тяги на 90±5° от импульса включения южного электрического двигателя малой тяги и управления импульсом в направлении движения для западного химического двигателя малой тяги на 270±5° от импульса включения южного электрического двигателя малой тяги.
4. Устройство по п. 1, в котором:
контроллер орбиты выполнен с возможностью обнаружения отказа южного электрического двигателя малой тяги и управления импульсом включения северного электрического двигателя малой тяги вблизи восходящего узла; и
контроллер орбиты выполнен с возможностью управления тормозным импульсом восточного химического двигателя малой тяги на 90±5° от импульса включения северного электрического двигателя малой тяги и управления импульсом в направлении движения для западного химического двигателя малой тяги на 270±5° от импульса включения северного электрического двигателя малой тяги.
5. Устройство по п. 1, в котором:
северный электрический двигатель малой тяги ориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35±25°; и
южный электрический двигатель малой тяги ориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35±25°.
6. Устройство по п. 5, в котором:
северный электрический двигатель малой тяги установлен на карданном подвесе;
южный электрический двигатель малой тяги установлен на карданном подвесе; и
контроллер орбиты выполнен с возможностью коррекции первого угла северного электрического двигателя малой тяги и коррекции второго угла южного электрического двигателя малой тяги.
7. Устройство по п. 5, в котором:
северный электрический двигатель малой тяги закреплен под первым углом; и
южный электрический двигатель малой тяги закреплен под вторым углом.
8. Способ управления маневрами для удержания спутника на орбите, в котором спутник содержит:
спутниковую платформу, имеющую сторону надира и сторону зенита,
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника,
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника,
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, при этом способ включает:
обнаружение отказа одного из электрических двигателей малой тяги и в случае отказа
- управление импульсом включения оставшегося электрического двигателя малой тяги вблизи орбитального узла;
- управление импульсом включения одного из химических двигателей малой тяги на 90±5° от импульса включения оставшегося электрического двигателя малой тяги; и
- управление импульсом включения другого из химических двигателей малой тяги на 270±5° от импульса включения оставшегося электрического двигателя малой тяги.
9. Способ по п. 8, в котором:
импульсом включения оставшегося электрического двигателя малой тяги создают изменение радиальной скорости спутника, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
импульсом включения одного из химических двигателей малой тяги на 90±5° создают первое изменение тангенциальной скорости спутника, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги; и
импульсом включения другого химического двигателя малой тяги на 270±5° создают второе изменение тангенциальной скорости спутника, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги; и
при этом составляющие вектора дельта-эксцентриситета, обусловленные импульсом включения химических двигателей малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги.
10. Способ по п. 8, в котором управление импульсами включения включает в себя:
обнаружение отказа северного электрического двигателя малой тяги;
управление импульсом включения южного электрического двигателя малой тяги вблизи нисходящего узла;
управление тормозным импульсом восточного химического двигателя малой тяги на 90±5° от импульса включения южного электрического двигателя малой тяги; и
управление импульсом в направлении движения для западного химического двигателя малой тяги на 270±5° от импульса включения южного электрического двигателя малой тяги.
11. Способ по п. 8, в котором управление импульсами включения включает в себя:
обнаружение отказа южного электрического двигателя малой тяги;
управление импульсом включения северного электрического двигателя малой тяги вблизи восходящего узла;
управление тормозным импульсом восточного химического двигателя малой тяги на 90±5° от импульса включения северного электрического двигателя малой тяги; и
управление импульсом в направлении движения для западного химического двигателя малой тяги на 270±5° от импульса включения северного электрического двигателя малой тяги.
12. Устройство управления маневрами для удержания спутника на орбите, содержащее:
контроллер орбиты, выполненный с возможностью управления маневрами для удержания на орбите спутника, содержащего:
спутниковую платформу, имеющую сторону надира, выполненную с возможностью быть обращенной к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника;
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника; при этом
контроллер орбиты выполнен с возможностью обнаружения отказа одного из электрических двигателей малой тяги и в случае отказа:
- управления импульсом включения вблизи орбитального узла оставшегося электрического двигателя малой тяги, создающего изменение радиальной скорости спутника, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
- определения составляющей вектора дельта-эксцентриситета, обусловленной возмущениями, влияющими на орбиту спутника;
- управления импульсом включения восточного химического двигателя малой тяги, создающего первое изменение тангенциальной скорости спутника, в первом положении на орбите, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения восточного химического двигателя малой тяги; и
- управления импульсом включения западного химического двигателя малой тяги, создающего второе изменение тангенциальной скорости спутника, во втором положении на орбите, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения западного химического двигателя малой тяги;
при этом контроллер орбиты выполнен с возможностью выбирать первое положение импульса включения восточного химического двигателя малой тяги и второе положение импульса включения западного химического двигателя малой тяги так, что составляющая вектора дельта-эксцентриситета, обусловленная импульсом включения восточного химического двигателя малой тяги, и составляющая вектора дельта-эксцентриситета, обусловленная импульсом включения западного химического двигателя малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги, и составляющую вектора дельта-эксцентриситета, обусловленную влиянием возмущений.
13. Устройство по п. 12, в котором:
контроллер орбиты выполнен с возможностью определять положение Солнца в зависимости от времени года и определять составляющую вектора дельта-эксцентриситета, обусловленную влиянием возмущений в зависимости от положения Солнца.
14. Устройство по п. 12, в котором:
северный электрический двигатель малой тяги сориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35±25°; и
южный электрический двигатель малой тяги сориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35±25°.
15. Устройство по п. 14, в котором:
северный электрический двигатель малой тяги является по меньшей мере одним из установленных на карданном подвесе;
южный электрический двигатель малой тяги установлен на карданном подвесе; и
контроллер орбиты выполнен с возможностью коррекции первого угла северного электрического двигателя малой тяги и коррекции второго угла южного электрического двигателя малой тяги.
16. Устройство по п. 14, в котором:
северный электрический двигатель малой тяги закреплен под первым углом; и
южный электрический двигатель малой тяги закреплен под вторым углом.
17. Способ управления маневрами для удержания спутника на орбите, в котором спутник содержит
спутниковую платформу, имеющую сторону надира и сторону зенита,
северный электрический двигатель малой тяги, установленный в направлении северного участка стороны зенита и ориентированный вниз для создания силы тяги по линии, проходящей через центр массы спутника,
южный электрический двигатель малой тяги, установленный в направлении южного участка стороны зенита и ориентированный вверх для создания силы тяги по линии, проходящей через центр массы спутника,
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания силы тяги по линии, проходящей через центр массы спутника, при этом способ включает:
обнаружение отказа одного из электрических двигателей малой тяги и в случае отказа:
управление импульсом включения оставшегося электрического двигателя малой тяги, создающего изменение радиальной скорости спутника, вблизи орбитального узла, которое создает составляющую вектора дельта-эксцентриситета орбиты спутника вследствие импульса включения оставшегося электрического двигателя малой тяги;
определение составляющей вектора дельта-эксцентриситета, обусловленной возмущениями, влияющими на орбиту спутника;
управление импульсом включения восточного химического двигателя малой тяги, создающего первое изменение тангенциальной скорости спутника, в первом положении на орбите, при этом первое изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения восточного химического двигателя малой тяги; и
управление импульсом включения западного химического двигателя малой тяги, создающего второе изменение тангенциальной скорости спутника во втором положении на орбите, при этом второе изменение тангенциальной скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения западного химического двигателя малой тяги;
при этом первое положение импульса включения восточного химического двигателя малой тяги и второе положение импульса включения западного химического двигателя малой тяги выбирают так, что составляющая вектора дельта-эксцентриситета, обусловленная импульсом включения восточного химического двигателя малой тяги, и составляющая вектора дельта-эксцентриситета, обусловленная импульсом включения западного химического двигателя малой тяги, компенсируют составляющую вектора дельта-эксцентриситета, обусловленную импульсом включения оставшегося электрического двигателя малой тяги, и составляющую вектора дельта-эксцентриситета, обусловленную возмущениями.
18. Способ по п. 17, дополнительно включающий:
определение положения Солнца в зависимости от времени года; и
определение составляющей вектора дельта-эксцентриситета, обусловленной возмущениями в зависимости от положения Солнца.
| СПОСОБ И СИСТЕМА ВЫВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТУ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ, ОБЛАДАЮЩИХ БОЛЬШИМ УДЕЛЬНЫМ ИМПУЛЬСОМ | 1997 |
|
RU2212363C2 |
| УСОВЕРШЕНСТВОВАННЫЕ СИСТЕМА И СПОСОБ ОРГАНИЗАЦИИ СИСТЕМЫ НЕГЕОСТАЦИОНАРНЫХ СПУТНИКОВ, НЕ СОЗДАЮЩИХ ПОМЕХ В РАБОТЕ СПУТНИКОВ, НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОМ КОЛЬЦЕ | 2001 |
|
RU2278472C2 |
| US 2009020650 A1, 22.01.2009 | |||
| US 6015116 A, 18.01.2000. | |||

