ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к спутникам, в частности к энергоэффективному маневрированию спутника.
УРОВЕНЬ ТЕХНИКИ
[002] Космические аппараты, такие как спутники или объекты, постоянно находящиеся в космическом пространстве, (RSO), обычно после запуска во время выполнения маневров для перехода на конечную орбиту испытывают значительный гравитационный момент (например, вращательный момент, обусловленный окружающей средой, возмущения вращательного момента, обусловленные окружающей средой, и т.д.). Обычно спутник или объект, постоянно находящийся в космическом пространстве и движущийся по орбите вокруг Земли, может быть размещен на промежуточной или начальной орбите (например, первой орбите) перед выполнением начального маневра для выхода на переходную орбиту (геостационарную переходную орбиту и т.п.) и достижения конечной орбиты. Затем спутник может выполнить окончательный маневр для сохранения конечной орбиты. Например, спутник может начать движение с низкой околоземной орбиты (НОО) и маневрировать по геопереходной орбите (ГПО), чтобы достигнуть конечной геостационарной орбиты (ГСО). Во время выполнения этих маневров увеличение гравитационного момента и/или момента импульса спутника может требовать значительного использования двигателей малой тяги и/или устройств, основанных на использовании момента импульса.
[003] Для противодействия этому гравитационному моменту и/или моменту импульса в некоторых известных спутниках используются маховики, расположенные внутри этих спутников. В частности, маховик включает в себя гиродин, который может вращаться с различными скоростями для управления пространственным положением спутника. Однако эти маховики требуют дополнительного пространства и веса полезной нагрузки и/или могут также требовать энергии для работы. Кроме того, в некоторых более современных спутниках для генерирования энергии используются раскрываемые солнечные панели, когда такие спутники перемещаются по направлению к конечной орбите, что обуславливает увеличение момента инерции и, соответственно, повышенную чувствительность к воздействию гравитационных моментов, что приводит к необходимости использования относительно крупных маховиков, требующих, в свою очередь, больше пространства и веса полезной нагрузки для соответствующих средств выведения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[004] Приведенный в качестве примера способ включает маневрирование спутником, вращающимся по орбите вокруг космического тела, с тем чтобы сориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат для уменьшения гравитационных моментов, действующих на спутник. Плоскость орбитальной системы координат основана на векторе орбитальной системы координат.
[005] Пример устройства включает в себя устройство для маневрирования спутника и контроллер ориентации, выполненный с возможностью побуждать устройство для маневрирования ориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат для уменьшения гравитационных моментов, действующих на спутник.
[006] Еще один приведенный в качестве примера способ включает маневрирование спутником, вращающимся по орбите вокруг космического тела, для ориентирования главной оси чувствительности спутника к плоскости орбитальной системы координат. Плоскость орбитальной системы координат задана вектором орбитальной системы координат. Приведенный в качестве примера способ также включает работу по меньшей мере одним двигателем малой тяги спутника, чтобы делать результирующий вектор тяги перпендикулярным главной оси чувствительности для изменения орбитального расстояния спутника.
[007] Еще один приведенный в качестве примера способ включает маневрирование спутником, движущимся по орбите вокруг космического тела, таким образом, что функциональный вектор спутника находится в пределах плоскости орбитальной системы координат, заданной вектором орбитальной системы координат. Вектор орбитальной системы координат направлен от спутника по направлению к центру космического тела. Приведенный в качестве примера способ также включает поворачивание спутника вокруг функционального вектора, с тем чтобы сориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат.
[008] Пример материального машиночитаемого носителя содержит сохраненные в нем команды, которые при исполнении, обусловливают выполнение машиной доступа к инерционным характеристикам или определения инерционных характеристик спутника, движущегося по орбите вокруг космического тела, для выявления главной оси чувствительности спутника, где спутник имеет соответствующий функциональный вектор, определения плоскости орбитальной системы координат с использованием матрицы преобразования в орбитальную систему координат и определения пространственного положения спутника для ориентирования главной оси чувствительности к определенной плоскости и для ориентирования функционального вектора относительно главной оси чувствительности, исходя из функции функционального вектора.
[009] Настоящее изобретение может содержать способ, который может включать маневрирование спутником, вращающимся по орбите вокруг космического тела, с тем чтобы сориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат для уменьшения гравитационных моментов, действующих на спутник, при этом плоскость орбитальной системы координат основана на векторе орбитальной системы координат. Маневрирование спутником может включать поворот спутника вокруг вектора тяги спутника. Это приводит к повышению надежности работы. Вектор тяги спутника может быть ориентирован так, чтобы быть перпендикулярным главной оси чувствительности. Способ также может включать определение главной оси чувствительности. Маневрирование спутником может включать приведение в действие по меньшей мере одного двигателя малой тяги или устройства, основанного на сохранении момента импульса. Ориентирование спутника может происходить при прохождении участка орбиты.
[0010] Еще один вариант реализации настоящего изобретения может содержать устройство, которое может включать в себя устройство для маневрирования спутника; и контроллер ориентации, выполненный с возможностью побуждать устройство для маневрирования ориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат для уменьшения гравитационных моментов, действующих на спутник. Контроллер ориентации может быть использован с возможностью побуждать устройство для маневрирования ориентировать функциональный вектор спутника с плоскостью орбитальной системы координат. Функциональный вектор может включать в себя вектор тяги. Устройство для маневрирования может включать в себя двигатель малой тяги. Контроллер ориентации может побуждать двигатель малой тяги ориентировать вектор тяги спутника перпендикулярно главной оси чувствительности. Для повышения надежности и точности устройство для маневрирования может включать в себя устройство, основанное на сохранении момента импульса.
[0011] Еще один вариант реализации настоящего изобретения может включать в себя способ, который может включать маневрирование спутником, вращающимся по орбите вокруг космического тела, для ориентирования главной оси чувствительности спутника к плоскости орбитальной системы координат, заданной вектором орбитальной системы координат; и работу по меньшей мере одним двигателем малой тяги спутника, чтобы делать результирующий вектор тяги перпендикулярным главной оси чувствительности для изменения орбитального расстояния спутника. Способ также может включать определение главной оси чувствительности. Ориентирование главной оси чувствительности может включать поворачивание спутника вокруг вектора тяги. Работа по меньшей мере одним двигателем малой тяги может включать координирование включения двигателей малой тяги спутника, исходя из вектора тяги. Маневрирование спутником может включать работу устройства, основанного на сохранении момента импульса. Для увеличения точности главная ось может быть ориентирована к вектору орбитальной системы координат или к плоскости орбитальной системы координат в пределах 5 градусов. Вектор тяги может проходить перпендикулярно главной оси чувствительности в пределах 5 градусов.
[0012] Еще один вариант реализации настоящего изобретения может включать в себя способ, который может включать маневрирование спутником, движущимся по орбите вокруг космического тела, таким образом, что функциональный вектор спутника находится в пределах плоскости орбитальной системы координат, заданной вектором орбитальной системы координат, направленным от спутника по направлению к центру космического тела; и поворачивание спутника вокруг функционального вектора таким образом, что ось чувствительности спутника ориентирована к плоскости орбитальной системы координат. Функциональный вектор может включать в себя вектор тяги. Вектор тяги может представлять собой результирующий вектор, полученный на основе множества двигателей малой тяги спутника. Указанное может улучшить работу при определенных условиях. Функциональный вектор может включать по меньшей мере одно из следующего: опорная ось датчика пространственного положения, ось поворота крыльев солнечных батарей, направления максимумов диаграммы направленности антенн, вектор исполнительного механизма или вектор расчетной полезной нагрузки. Способ также может включать вычисление схемы тяги спутника исходя по меньшей мере из ориентации или положения спутника. Способ также может включать сохранение спутника на заданной дальности по орбите.
[0013] Еще один вариант реализации изобретения может включать в себя материальный машиночитаемый носитель, который содержит сохраненные в нем команды и при исполнении может обусловливать выполнение машиной: доступа к инерционным характеристикам или определения инерционных характеристик спутника, движущегося по орбите вокруг космического тела, для выявления оси чувствительности спутника, при этом спутник имеет соответствующий функциональный вектор; определения плоскости орбитальной системы координат с использованием матрицы преобразования в орбитальную систему координат и определения пространственного положения спутника для ориентирования оси чувствительности к определенной плоскости орбитальной системы координат, и для ориентирования функционального вектора относительно оси чувствительности исходя из функции функционального вектора. Машиночитаемый носитель, содержащий сохраненные в нем команды, может также обусловливать выдачу машиной команд в контроллер тяги на использование одного или более двигателей малой тяги для перемещения спутника в пространственное положение. Контроллер тяги может сохранять дальность спутника по орбите. Функциональный вектор может включать вектор тяги. Машиночитаемый носитель, содержащий сохраненные в нем команды, может дополнительно обусловливать выполнение машиной повторной корректировки пространственного положения на основе по меньшей мере обновленного положения или пространственного положения спутника.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] На ФИГ. 1 представлен пример спутника, в котором могут быть реализованы примеры, раскрытые в настоящем документе.
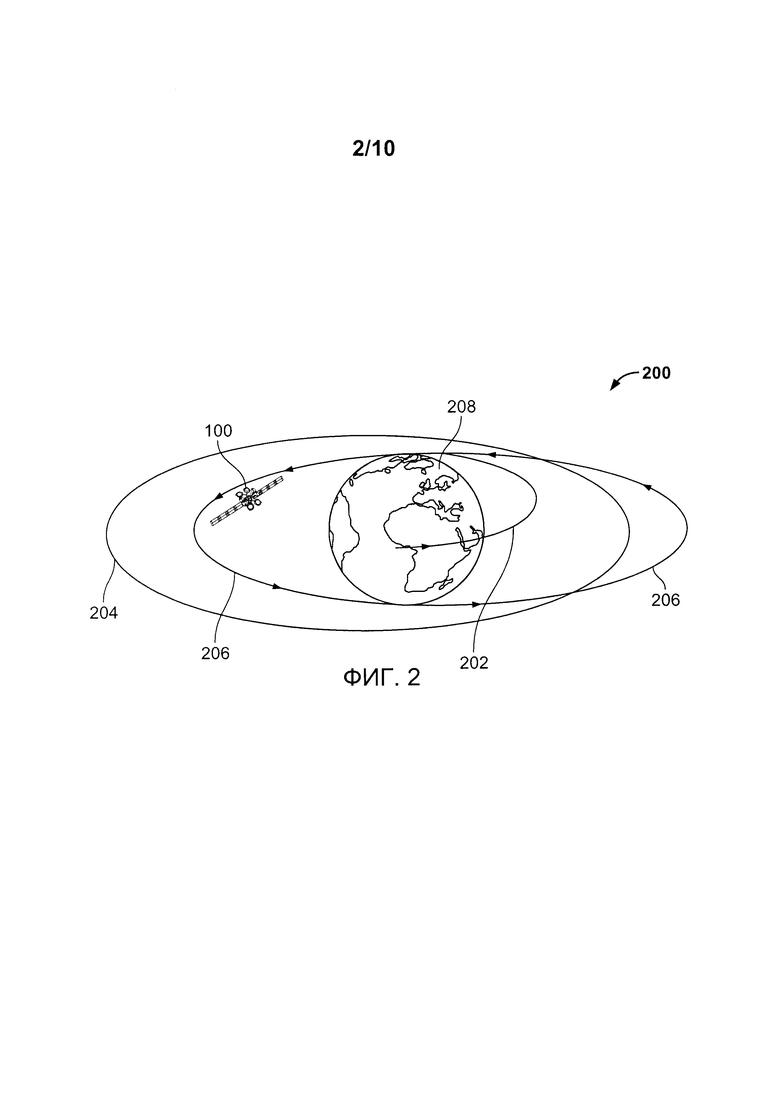
[0015] На ФИГ. 2 представлен пример схемы орбитальной траектории для приведенного в качестве примера спутника по ФИГ. 1, движущегося с начальной орбиты на конечную орбиту по переходной орбите.
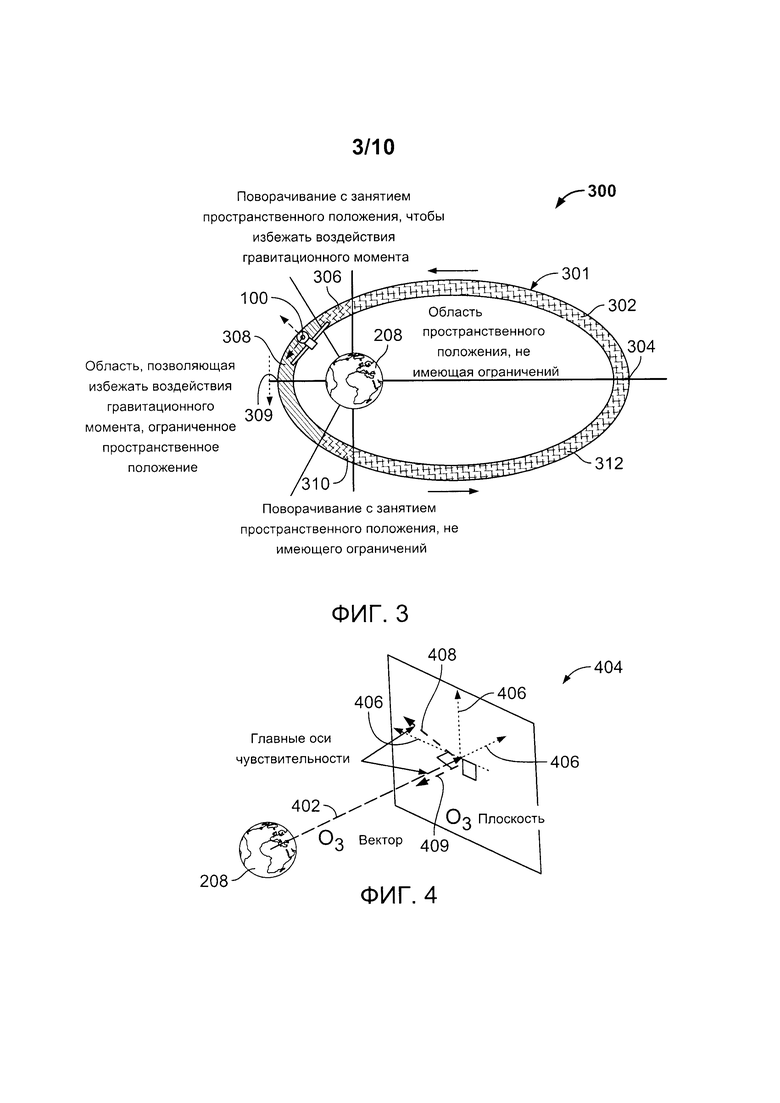
[0016] На ФИГ. 3 представлен еще один пример схемы орбитальной траектории, изображающей различные зоны маневрирования примера конечной орбиты.
[0017] На ФИГ. 4 показан пример орбитальной ориентации в соответствии с основными положениями настоящего изобретения для уменьшения гравитационных моментов, испытываемых приведенным в качестве примера спутником по ФИГ. 1.
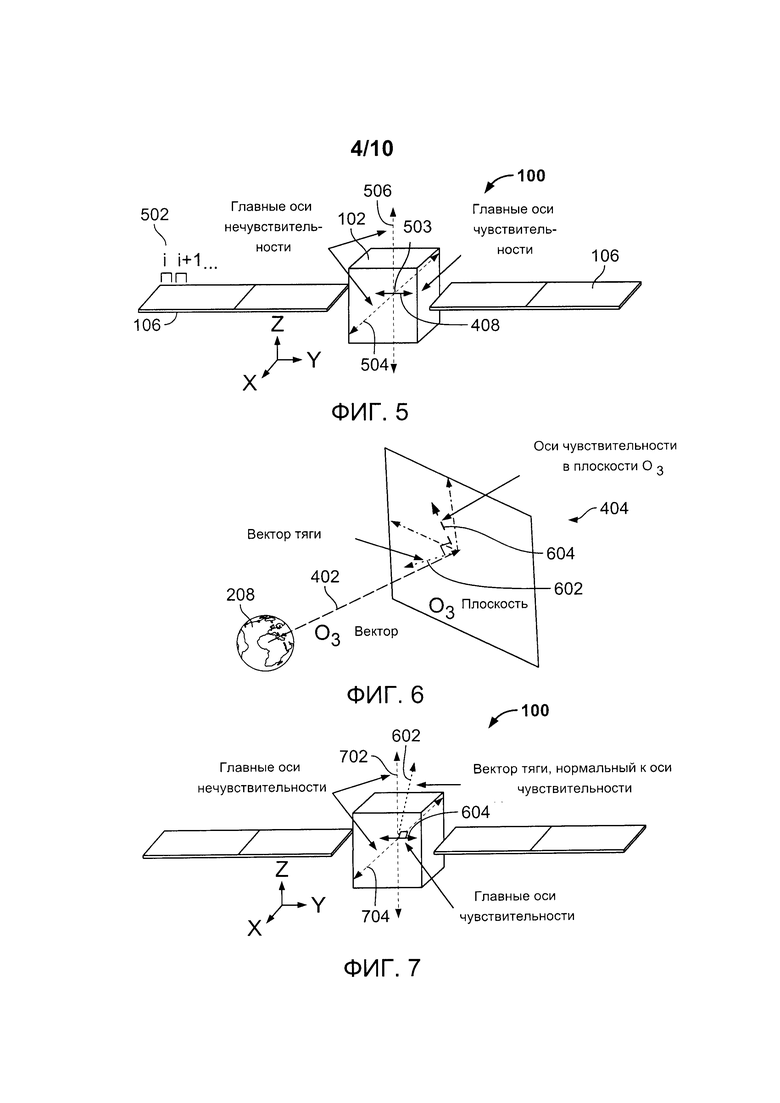
[0018] На ФИГ. 5 показано упрощенное изображение приведенного в качестве примера спутника по ФИГ. 1, которое иллюстрирует определение приведенных в качестве примера осей, связанных с примером орбитальной ориентации по ФИГ. 4.
[0019] На ФИГ. 6 показан пример векторов и плоскостей первого примера маневра поднятия/снижения орбиты посредством двигателей тяги приведенного в качестве примера спутника по ФИГ. 1 в соответствии с основными положениями настоящего изобретения.
[0020] На ФИГ. 7 показано упрощенное изображение приведенного в качестве примера спутника по ФИГ. 1, которое иллюстрирует пример направленных осей, связанных с первым примером маневра поднятия/снижения орбиты посредством двигателей тяги по ФИГ. 6.
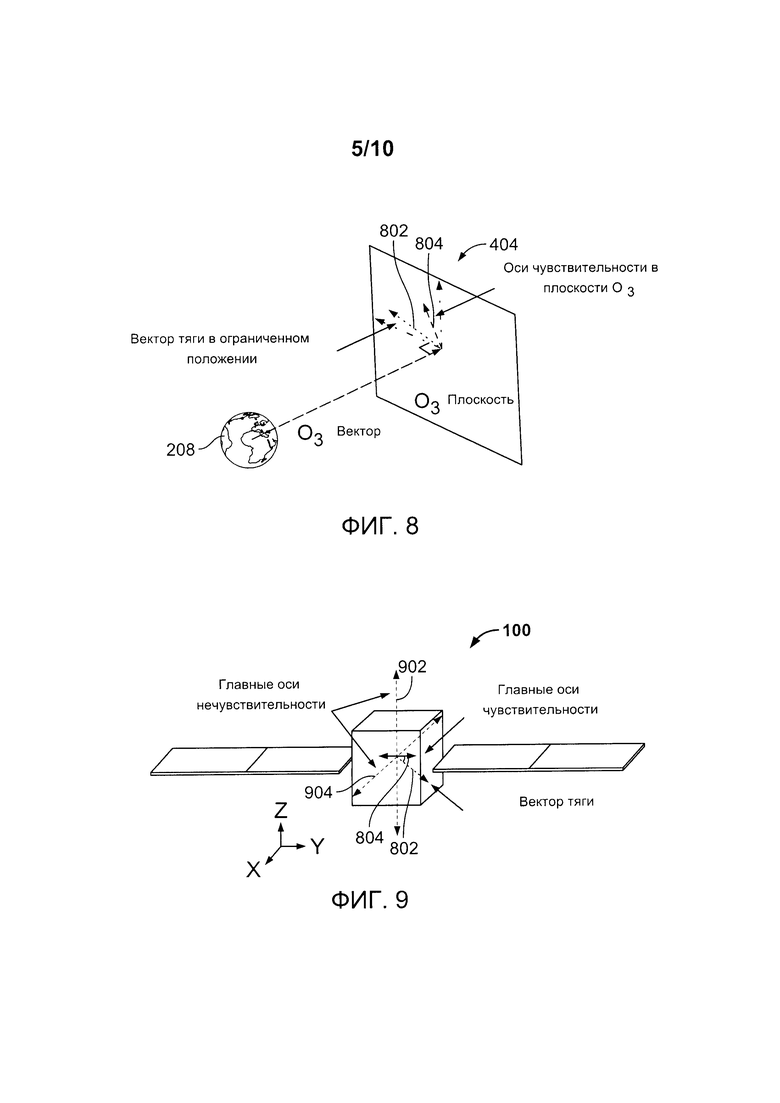
[0021] На ФИГ 8 показаны примеры векторов и плоскостей второго примера маневра поднятия/снижения орбиты посредством двигателей тяги приведенного в качестве примера спутника по ФИГ. 1 в соответствии с основными положениями настоящего изобретения.
[0022] На ФИГ. 9 показано упрощенное изображение приведенного в качестве примера спутника по ФИГ. 1, которое иллюстрирует пример направленных осей, связанных со вторым примером маневра поднятия/снижения орбиты посредством двигателей тяги по ФИГ. 8.
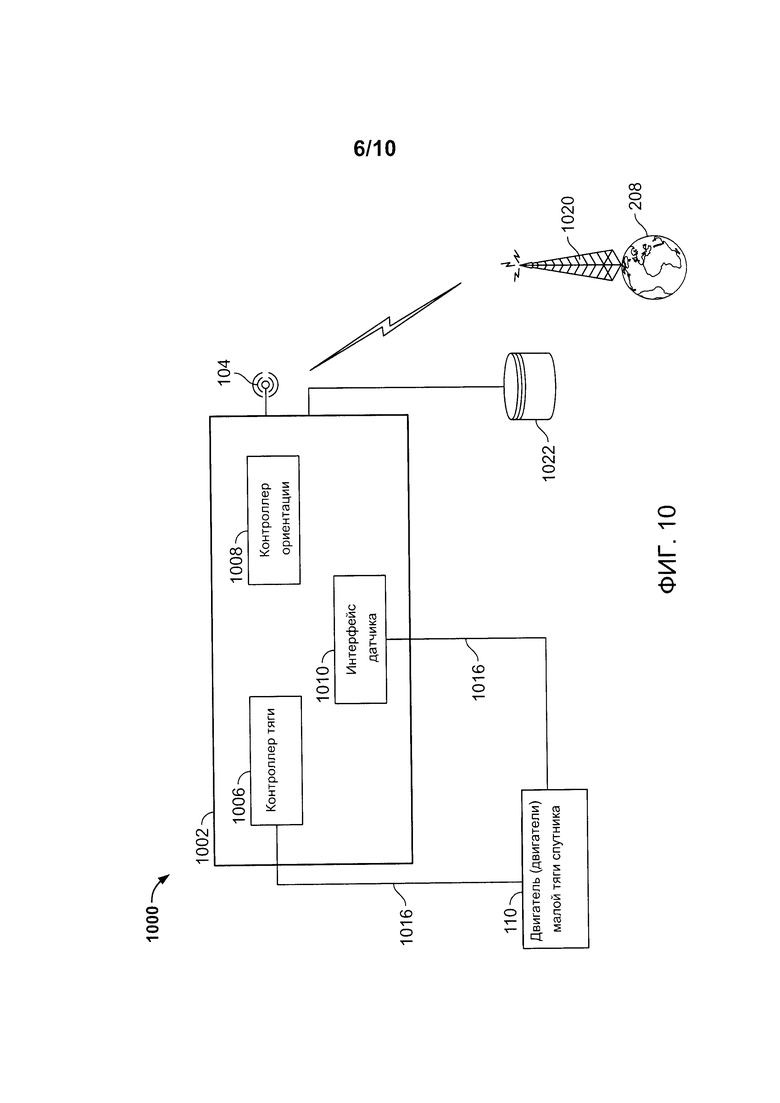
[0023] На ФИГ. 10 приведен пример спутниковой системы сохранения энергии, которая может быть использована, чтобы реализовать примеры, раскрытые в настоящем документе.
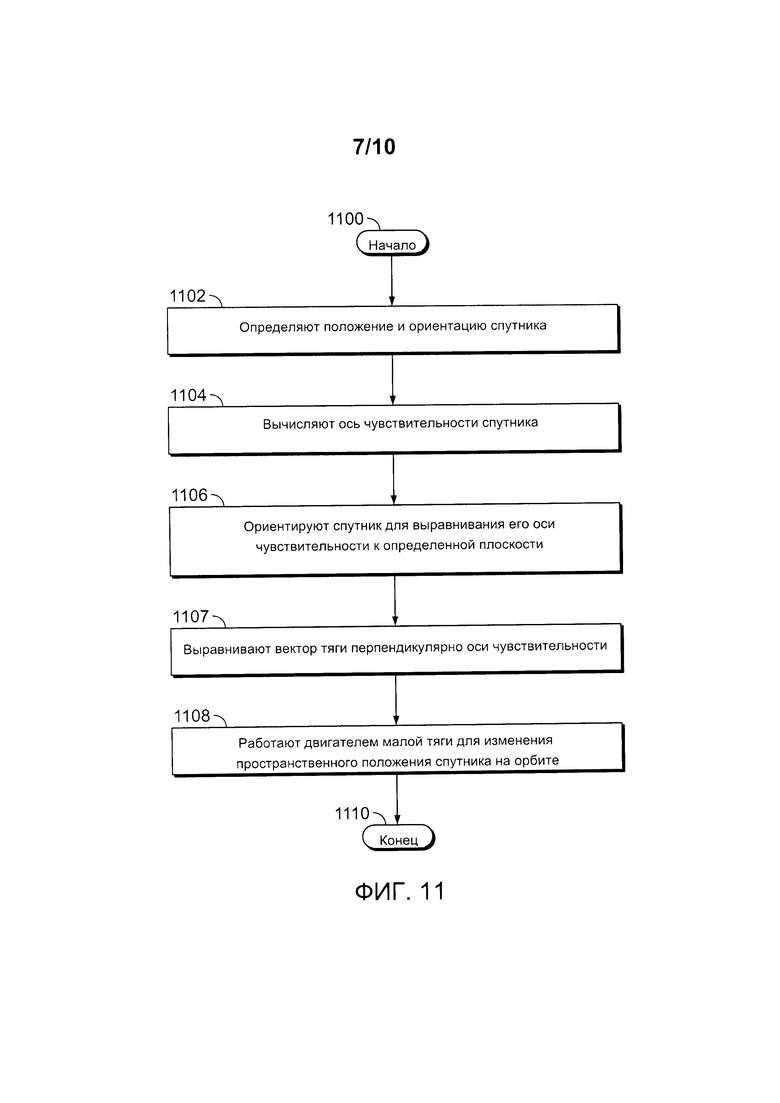
[0024] На ФИГ. 11 показана структурная схема, представляющая пример способа, который может быть использован для реализации примеров, раскрытых в настоящем документе.
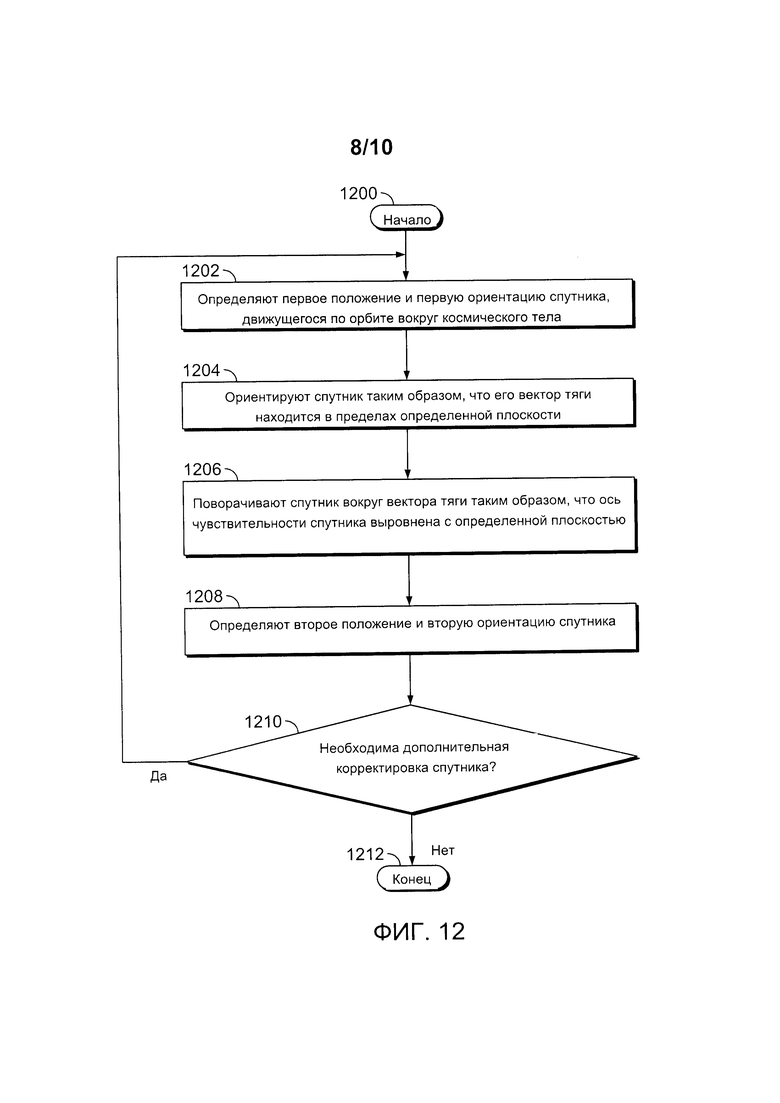
[0025] На ФИГ. 12 показана еще одна структурная схема, представляющая пример способа, который может быть использован для реализации примеров, раскрытых в настоящем документе.
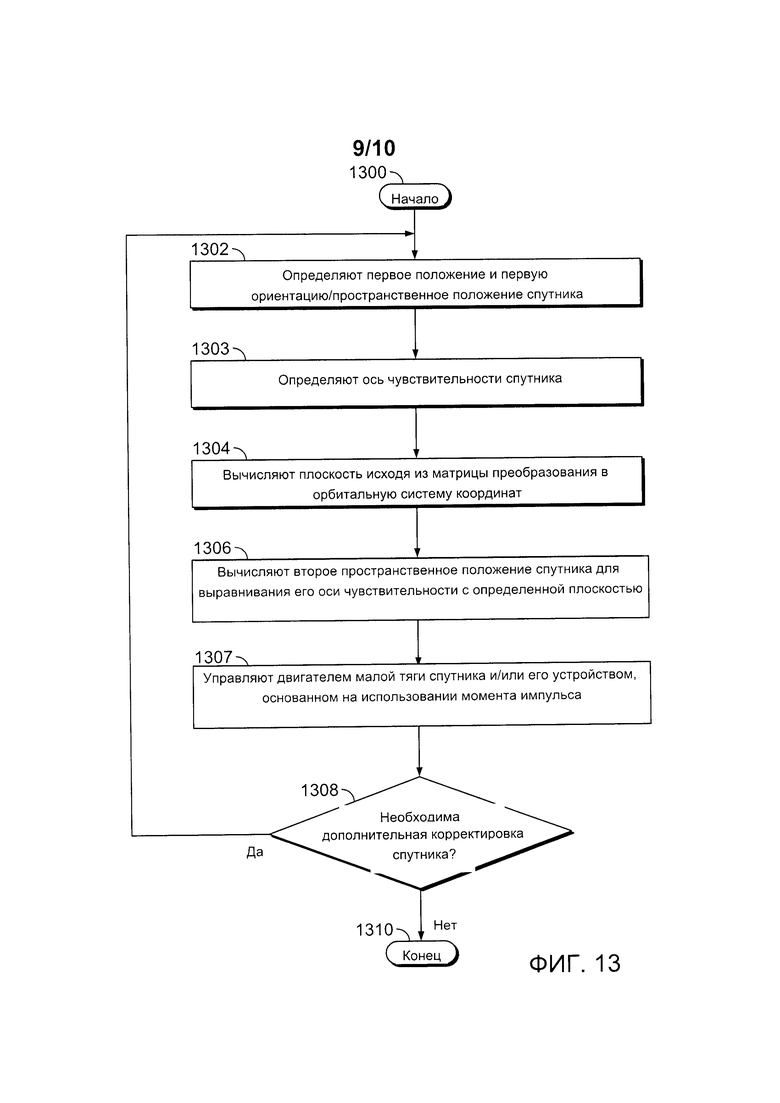
[0026] На ФИГ. 13 показана еще одна структурная схема, представляющая пример способа, который может быть использован для реализации примеров, раскрытых в настоящем документе.
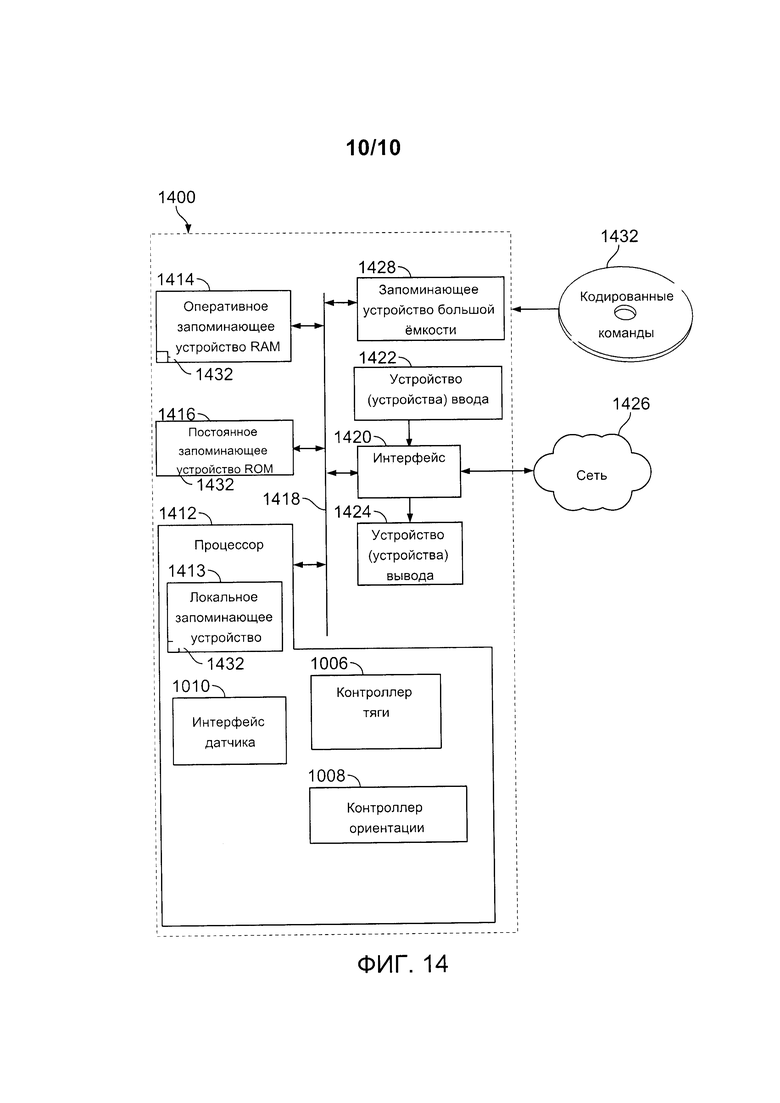
[0027] На ФИГ. 14 показана блок-схема примера процессорной платформы, выполненной с возможностью исполнения машиночитаемых команд, для реализации приведенных в качестве примера способов по ФИГ. 11-13.
[0028] Везде, где возможно, одинаковые ссылочные номера будут использоваться на чертеже (чертежах) и в сопровождающем письменном описании для обозначения одинаковых или подобных частей. Фигуры чертежей выполнены не в масштабе.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0029] В настоящем документе раскрыто энергоэффективное маневрирование спутника. Обычно спутник или объект, постоянно находящийся в космическом пространстве и движущийся по орбите вокруг Земли, может быть размещен на промежуточной или начальной орбите (например, первой орбите) перед выполнением начального маневра для выхода на переходную орбиту (геостационарную переходную орбиту и т.п.) и достижения конечной орбиты. Затем спутник может выполнить окончательный маневр для сохранения конечной орбиты. Например, спутник может начать движение с низкой околоземной орбиты (НОО) и маневрировать по геопереходной орбите (ГПО), чтобы достигнуть конечной геостационарной орбиты (ГСО). Во время такого маневрирования спутник может испытывать воздействие гравитационных моментов и/или повышенное образование момента импульса. Кроме того, даже при нахождении на установившейся орбите (например, конечной орбите) спутник может испытывать воздействие гравитационного момента, обусловленного инерционными характеристиками спутника (например, при прохождении перигея орбиты).
[0030] Во время выполнения этих маневров и/или сохранения орбиты, накопления гравитационного момента и/или момента импульса спутника может требоваться значительное использование двигателей малой тяги или других устройств обеспечения движения и, следовательно, истощение топливных ресурсов/ресурсов создания тяги (например, топлива для создания тяги, сохраненной энергии для создания тяги), сохраненных в спутнике, и/или значительное использование маховиков для противодействия этому гравитационному моменту и/или излишнему моменту импульса. Однако эти маховики часто требуют дополнительного пространства и/или веса полезной нагрузки и могут также требовать значительной энергии для работы во время маневрирования или повторной ориентации спутника. Некоторые спутники используют раскрываемые солнечные панели, увеличивая таким образом момент инерции спутника, что может привести к необходимости использования еще больших маховиков и, таким образом, еще большего пространства, и/или веса полезной нагрузки, и/или необходимой для работы энергии.
[0031] Примеры, раскрытые в настоящем документе, обеспечивают создание более компактных и более легких спутников благодаря энергоэффективному маневрированию спутника. В частности, более эффективное маневрирование спутника обеспечивает возможность создания и использования относительно легких и более эффективных в пространственном отношении устройств перемещения и/или устройств, основанных на использовании момента импульса, (например, более компактных двигателей малой тяги, маховиков, устройств, основанных на сохранении момента импульса, и т.д.). Примеры, раскрытые в настоящем документе, обеспечивают ориентирование и/или определение ориентации спутника таким образом, что ось чувствительности спутника ориентирована (например, выровнена) к определенной плоскости орбитальной системы координат для уменьшения (например, минимизирования) гравитационных моментов. В некоторых примерах вектор тяги спутника ориентирован так, чтобы быть перпендикулярным оси чувствительности спутника для уменьшения гравитационных моментов, действующих на спутник во время подъема орбиты, например. Это уменьшение гравитационных моментов обеспечивает возможность маневрирования спутником (например, между орбитами или в пределах орбиты) с относительно малой затратой энергии и/или меньшим использованием такого маховика (маховиков), например. Таким образом, уменьшенные требования к энергетическим параметрам позволяют выполнить спутник значительно более компактным и легким, в результате чего обеспечивается уменьшение необходимого пространства полезной нагрузки для средств доставки (например, пространства полезной нагрузки для средства доставки, ракет, космического челнока и т.д.).
[0032] При использовании в настоящем документе термин "спутник" может относиться к объекту, постоянно находящемуся в космическом пространстве, и наоборот. При использовании в настоящем документе термин "спутник" относится к объекту, движущемуся по орбите вокруг планеты или другому объекту в космосе. При использовании в настоящем документе термин "данные датчика" относится к информации, полученной от датчика, используемого для получения данных о положении спутника, включая, помимо прочего, время и дальность, скорость изменения дальности, угол азимута и/или угол возвышения и т.п. При использовании в настоящем документе термин "главная ось чувствительности" относится к оси спутника или космического аппарата, относительно которой градиенты силы тяжести могут развивать максимальный вращательный момент, действующий на спутник или космический аппарат. При использовании в настоящем документе термин "ось чувствительности" относится к оси или осям спутника или космического аппарата, относительно которых градиенты силы тяжести могут развивать значительный вращательный момент, действующий на спутник или космический аппарат. При использовании в настоящем документе термин "ось нечувствительности" относится к оси спутника или космического аппарата, относительно которой градиенты силы тяжести развивают незначительный вращательный момент (например, минимальный вращательный момент). При использовании в настоящем документе в отношении выравнивания/ориентирования вектора и/или осей к плоскости (например, расчетной плоскости или другого вектора), выравнивание/ ориентирование означает нахождение в пределах 5 градусов от этой плоскости. Однако указанный диапазон может варьироваться, исходя из инерционных характеристик спутника и/или возможностей механизмов создания тяги/движения спутника.
[0033] Хотя примеры, раскрытые в настоящем документе, показаны соотносящимися с поднятием орбиты посредством двигателей тяги и/или сохранением орбит, примеры, раскрытые в настоящем документе, могут применяться для других спутников/объектов, постоянно находящихся в космическом пространстве включая, помимо прочего, опорную ось датчика пространственного положения, ось поворота крыльев солнечных батарей, направления максимумов диаграммы направленности антенн, вектор исполнительного механизма или вектор расчетной полезной нагрузки. В этих других примерах вместо вектора тяги может учитываться, например, функциональный вектор (такой как вектор важности). Эти векторы могут соотноситься с операциями и/или функциями спутника, которые не относятся к маневрированию, соотносящимся с сохранением орбиты энергоэффективным образом и/или служащими для ее сохранения.
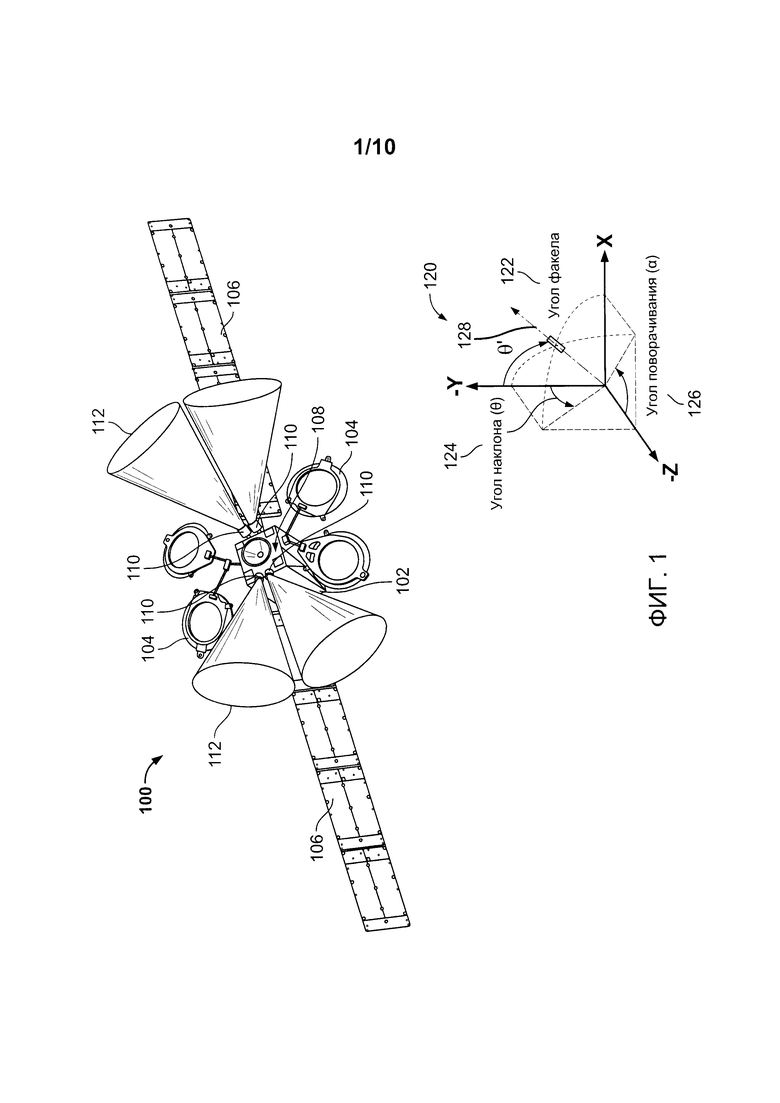
[0034] На ФИГ. 1 представлен пример спутника 100, в котором могут быть реализованы примеры, раскрытые в настоящем документе. Спутник 100 показанного примера включает в себя корпус 102, который включает в себя бортовые процессоры, батареи и/или топливные баки, антенны (например, антенны связи и т.д.) 104, солнечные панели 106 и двигательную систему 108. Приведенная в качестве примера двигательная система 108 включает в себя двигатели 110 малой тяги, имеющие раструбы 112 обеспечения тяги. В этом примере солнечные панели 106 находятся в развернутом состоянии (например, раскрыты относительно корпуса 102 спутника), с изменением, в результате этого, инерционных/массовых характеристик спутника 100 в отличие от неразвернутого состояния спутника 100, при котором солнечные панели 106 сложены внутрь в направлении корпуса 102 спутника.
[0035] В процессе работы спутник 100 может поддерживать связь с внешними системами (например, передавать, а также получать) через антенны 104 для маневрирования спутника 100 между орбитальными траекториями и/или орбитальными высотами и/или для предоставления данных внешним наземным системам, например. В частности, спутник 100 показанного примера маневрирует путем приведения в действие (например, запуска) двигателей 110 малой тяги, которые являются электрическими (например, выполнены на основе ионов, являются ионным ракетным двигателем, двигателем малой тяги на основе ксенона и т.д.). Например, спутник 100 может варьировать продолжительность работы и/или импульс различных двигателей малой тяги из двигателей 110 малой тяги, чтобы маневрировать спутником 100 и/или управлять пространственным положением приведенного в качестве примера спутника 100 относительно космического тела, вокруг которого спутник движется по орбите.
[0036] В одном примере по ФИГ. 1 показана система 120 координат для маневрирования приведенного в качестве примера спутника 100. В системе 120 координат для маневрирования показан угол 122 факела двигателя малой тяги, обозначенный символом θ', угол 124 наклона, обозначенный символом θ, и угол 126 поворачивания, обозначенный символом α. Система 120 координат изображает множество степеней вращательного перемещения, по которым спутник 100 может быть ориентирован/повернут во время нахождения на орбите, или перемещения между различными орбитами. В этом примере показан результирующий вектор 128 спутника 100. В частности, пример результирующего вектора 128 иллюстрирует результирующее направление движения спутника 100, получение на основе суммы векторов приведения в действия и/или ориентации отдельных двигателей малой тяги из двигателей 110 малой тяги.
[0037] Примеры, раскрытые в настоящем документе, обеспечивают спутнику 100 возможность использовать меньше энергии и/или топлива для противодействия гравитационным моментам и/или излишнему моменту импульса (например, образованию момента импульса). В частности, примеры, раскрытые в настоящем документе, обеспечивают энергоэффективные орбитальные переходы, сохранение орбиты и/или повторную ориентацию спутника 100. Полученная в результате экономия энергии позволяет выполнить приведенный в качестве примера спутник 100 значительно меньшим вследствие сниженных требований к энергетическим параметрам и/или использования меньшего количества компонентов, необходимых для маневрирования.
[0038] На ФИГ. 2 представлен пример схемы 200 орбитальной траектории для приведенного в качестве примера спутника 100 по ФИГ. 1, движущегося с начальной орбиты 202 на конечную орбиту 204 по переходной орбите 206. В показанном на ФИГ. 2 примере спутник 100 движется по орбите вокруг космического тела или планеты (например, Земли, Марса и т.п.) 208 по начальной орбите 202 и переходит на конечную орбиту 204. В этом примере спутник 100 начинает свое движение по переходной орбите 206 посредством выполнения начального маневра с использованием двигателей 110 малой тяги. По мере своего перемещения от начальной орбиты 202 к конечной орбите 204 спутник 100 движется по траектории, заданной переходной орбитой 206 и использует двигатели 110 малой тяги для выполнения окончательного маневра для сохранения конечной орбиты 204. Хотя пример, показанный на схеме 200 орбитальной траектории, изображает спутник 100, движущийся с нижней начальной орбиты 202 на более высокую конечную орбиту 204, в некоторых примерах спутник 100 не завершает окончательный маневр для перемещения на более высокую конечную орбиту 204, что заставляет спутник 100 двигаться по переходной орбите 206. В альтернативном варианте реализации, спутник 100 может двигаться с конечной орбиты 204 на более низкую/начальную орбиту 202.
[0039] На ФИГ. 3 представлен еще один пример схемы 300 орбитальной траектории, изображающей различные зоны маневрирования приведенной в качестве примера конечной орбиты/орбитальной траектории 301. В показанном примере по ФИГ. 3 спутник 100 движется по приведенной в качестве примера орбитальной траектории 301, включающей в себя область 302 пространственного положения, не имеющую ограничений и характеризующуюся апогеем (например, наибольшим расстоянием между спутником 100 и планетой 208) 304 орбиты, в котором спутник 100 испытывает наименьшее воздействие градиентов силы тяжести, обусловленных планетой 208. Приведенная в качестве примера орбитальная траектория 301 также включает в себя зону 306, в которой спутником 100 можно маневрировать (например, осуществлять поворачивание) с занятием пространственного положения в соответствии с основными положениями настоящего изобретения, чтобы избежать воздействия гравитационного момента, обусловленного планетой 208, и зону 308, в которой не допускается образования градиентов силы тяжести, обусловленных планетой 208, посредством сохранения ограниченного пространственного положения спутника 100. В этом примере зона 308 характеризуется орбитальным перигеем 309, в котором планета 208 обусловливает воздействие на спутник 100 максимальными градиентами силы тяжести, вследствие нахождения спутника 100 в непосредственной близости (например, в ближайшей точке) к планете 208 на показанной в качестве примера орбитальной траектории 301.
[0040] В одном примере по ФИГ. 3 спутник 100 осуществляет поворачивание в не имеющее ограничений пространственное положение (например, пространственное положение/ориентация спутника 100 не сохраняется) в области 310 орбитальной траектории 301. В этом примере орбитальная траектория 301 также включает в себя область 312 пространственного положения, не имеющую ограничений и расположенную до того, как спутник 100 приблизится к апогею 304 орбиты. Примеры, раскрытые в настоящем документе, могут быть применены к переходным орбитам (например, поднятию орбиты), таким как орбиты, показанные на ФИГ. 2, а также к сохранению орбит, приведенных в примере по ФИГ. 3.
[0041] На ФИГ. 4 показана приведенная в качестве примера ориентация орбиты в соответствии с основными положениями настоящего изобретения для уменьшения гравитационных моментов, испытываемых приведенным в качестве примера спутником 100 по ФИГ. 1. В частности, приведенная в качестве примера ориентация и/или соответствующий маневр (например, маневр по сохранению показанной в качестве примера ориентации) спутника 100 выполняют посредством задания пространственного положения (например, относительной ориентации) спутника 100, которое может сохраняться для уменьшения (например, минимизирования) гравитационных моментов, испытываемых спутником 100 под воздействием планеты 208 при сохранении спутником 100 орбиты вокруг планеты 208.
[0042] В показанном примере по ФИГ. 4 спутник 100 движется по орбите вокруг планеты 208, задавая, таким образом, вектор 402 орбитальной системы координат, который обозначен символом О3, с соответствующей плоскостью 404 орбитальной системы координат, которая обозначена как плоскость О3. В этом примере вектор 402 задан от центра тяжести планеты 208 до центра тяжести спутника 100. Плоскость 404 задана по центру тяжести спутника 100, а также перпендикулярно вектору 402, исходя из вектора 402. В одном примере по ФИГ. 4 показаны оси системы координат 406 плоскости 404. В этом примере показаны главные оси 408, 409 чувствительности спутника 100 относительно вектора 402 и плоскости 404. В этом примере ось 408 чувствительности является главной осью чувствительности спутника 100.
[0043] В одном примере по ФИГ. 4, для того чтобы избежать и/или уменьшить воздействие гравитационного момента на спутник 100, главная ось 408 чувствительности и/или по меньшей мере одна из осей чувствительности спутника 100 помещена в пределах плоскости 404. Определение и/или задание главной оси чувствительности и/или любой из главных осей чувствительности может быть выполнено с использованием соответствующего примера вычислений, относящихся к ориентированию/выравниванию/пространственному положению спутника 100, как более подробно описано ниже в связи с ФИГ. 5. Однако приведенные в качестве примеров операции задания, вычисления и/или определения, описанные ниже, не являются исчерпывающими.
[0044] Дополнительно или еще в одном варианте реализации изобретения, пример ориентации/пространственного положения, показанный на ФИГ. 4, может быть использован для перехода между орбитами и/или изменения орбитальных высот, например. В частности, может быть предпочтительным обеспечение и/или направление тяги от спутника 100 с минимальным и/или по существу нулевым гравитационным моментом, действующим на спутник 100 во время подъема орбиты, например. В альтернативном варианте реализации ось 409 чувствительности является главной осью чувствительности и, соответственно, гравитационный момент может быть уменьшен (например, минимизирован) посредством ориентирования (например, выравнивания) оси 409 чувствительности вдоль вектора 402 орбитальной системы координат или плоскости 404 орбитальной системы координат, например.
[0045] На ФИГ. 5 показано упрощенное изображение приведенного в качестве примера спутника 100 по ФИГ. 1, которое иллюстрирует определение примеров осей, соответствующих примеру ориентации на орбите по ФИГ. 4, для уменьшения (например, минимизирования) гравитационного момента, действующего на спутник 100. В частности, гравитационные моменты, испытываемые спутником 100, уменьшают и/или минимизируют на основании инерционных/массовых характеристик спутника 100 в сочетании с управлением пространственным положением, описанным выше в связи с ФИГ. 4.
[0046] Для уменьшения гравитационных моментов, испытываемых спутником 100, сначала определяют и/или характеризуют массовые и/или инерционные характеристики и испытываемый гравитационный момент приведенного в качестве примера спутника 100, например. В частности, спутник 100 характеризуют как дискретные/дискретизированные массовые элементы 502, расположенные на относительных расстояниях от центра тяжести 503 спутника 100. В связи с этим, пространственно зависимые инерционные характеристики спутника 100 могут зависеть от того, находится ли спутник 100 в развернутом или неразвернутом состоянии (например, раскрыты ли солнечные панели 106 относительно корпуса 102 спутника). В частности, массовые элементы 502, обозначенные i, i+1 и т.д., в этом примере могут находиться на разных расстояниях от центра тяжести 503 и, таким образом, изменять общие инерционные характеристики спутника 100. В этом примере массовые/инерционные характеристики массовых элементов 502 используют для задания тензора инерции, I, и/или матрицы массы/инерции и/или для определения главных осей, осей чувствительности и/или нечувствительности спутника 100. В этом примере тензор инерции, I, является массивом с переменными параметрами, задающим инерционные характеристики спутника 100 в направлениях x, y и z, показанных на ФИГ. 5.
[0047] В одном примере по ФИГ. 5 на основании инерционных свойств спутника 100 вычисляют гравитационный момент, действующий на спутник 100, согласно уравнению 1:
 , где
, где
 - вращательный момент, соотносящийся с градиентами силы тяжести (в системе координат тела в виде спутника 100),
- вращательный момент, соотносящийся с градиентами силы тяжести (в системе координат тела в виде спутника 100),
GM - гравитационная постоянная планеты 208,
r - расстояние между центром инерционной системы координат для планеты 208 (например, центром масс планеты 208) и центром тяжести спутника 100,
 - вектор (например, вектор 402), заданный на основании оси 3, которая основана на третьем столбце массива системы координат тела, проходящей от центра тяжести спутника 100 к центру инерционной системы координат (например, геометрическому центру и/или центру тяжести) планеты 208, и
- вектор (например, вектор 402), заданный на основании оси 3, которая основана на третьем столбце массива системы координат тела, проходящей от центра тяжести спутника 100 к центру инерционной системы координат (например, геометрическому центру и/или центру тяжести) планеты 208, и
I - тензор инерции спутника 100. В этом примере вектор используется для корректировки системы координат тела (например, системы координат тела в виде спутника 100) относительно орбитальной системы координат с учетом планеты 208.
[0048] Для вычисления главных осей чувствительности спутника 100 нижеследующие уравнения 2 и 3 приняты в виде следующих обозначений:
 ,
,
 , где
, где
IВ' - главный тензор инерции,
ТB'B преобразование из геометрической системы координат тела с приведением к главной оси в центре тяжести спутника 100, и
O3 - третий столбец вышеупомянутого массива в системе координат тела в виде спутника 100 относительно орбитальной системы координат,
ТВО представляет вектор от центра тяжести спутника 100 до центра тяжести планеты 208. На основании обозначений уравнений (2) и (3) для вычисления вращательного момента, испытываемого примером спутника 100 относительно главной оси этого примера спутника 100, получают векторное произведение O3 и IB'О3, как выражено ниже уравнением 4:
 ,
,
где TB'B в некоторых примерах может быть использовано для поворота  обратно в геометрическую систему координат тела. Как можно видеть из уравнения 4, вращательный момент, действующий на пример спутника 100, пропорционален главным инерциальным различиям в разных ориентациях. Наиболее значительные главные инерциальные различия соответствуют главным осям наибольшей чувствительности. Например, если IX и IZ идентичны, гравитационный момент относительно главной оси y будет равен нулю. В другом примере, если IY значительно меньше, чем IX и IZ, вращательный момент, действующий относительно IY и/или в направлении у, приведет к появлению наибольшего вращательного момента, вследствие чего IY станет главной осью наибольшей чувствительности. На ФИГ. 5 показаны главная ось 408 чувствительности по ФИГ. 4, а также оси 504, 506 нечувствительности. Оси 504, 506 нечувствительности показанного примера по ФИГ. 5 обозначают оси, в которых спутник 100 не чувствителен к гравитационным моментам (то есть, не чувствителен до соответствующей степени и т.д.).
обратно в геометрическую систему координат тела. Как можно видеть из уравнения 4, вращательный момент, действующий на пример спутника 100, пропорционален главным инерциальным различиям в разных ориентациях. Наиболее значительные главные инерциальные различия соответствуют главным осям наибольшей чувствительности. Например, если IX и IZ идентичны, гравитационный момент относительно главной оси y будет равен нулю. В другом примере, если IY значительно меньше, чем IX и IZ, вращательный момент, действующий относительно IY и/или в направлении у, приведет к появлению наибольшего вращательного момента, вследствие чего IY станет главной осью наибольшей чувствительности. На ФИГ. 5 показаны главная ось 408 чувствительности по ФИГ. 4, а также оси 504, 506 нечувствительности. Оси 504, 506 нечувствительности показанного примера по ФИГ. 5 обозначают оси, в которых спутник 100 не чувствителен к гравитационным моментам (то есть, не чувствителен до соответствующей степени и т.д.).
[0049] В некоторых примерах оси чувствительности и нечувствительности космического аппарата определяют исходя из известных массовых/инерционных характеристик космического аппарата (например, заданных исходя из конструкции космического аппарата). Например, массовые характеристики тела 102 в виде спутника, а также солнечных панелей 106 могут быть известны исходя из конструкции спутника 100. Хотя спутник 100 показанного примера расположен симметрично вдоль нескольких осей, ассиметричное распределение массы/инерции спутника может привести к появлению множества осей чувствительности. Однако в таких примерах имеется одна ось чувствительности, которая может испытывать максимальный гравитационный момент и, таким образом, обозначается как главная ось чувствительности. Хотя приведенные выше в качестве примера вычисления по ФИГ. 5 используют для определений, эти примеры не являются исчерпывающими и любые подходящие вычисления и/или способы вычислений могут быть использованы. Некоторые другие примеры, раскрытые ниже на ФИГ. 6-9, используют эти примеры вычислений осей чувствительности и нечувствительности для ориентирования векторов тяги и/или функциональных векторов для минимизирования гравитационных моментов.
[0050] На ФИГ. 6 проиллюстрированы примеры векторов и плоскостей по ФИГ. 1 первого примера маневра поднятия орбиты посредством двигателей тяги приведенного в качестве примера спутника 100 в соответствии с основными положениями настоящего изобретения. В одном примере по ФИГ. 6 спутник 100 выполняет переход с нижней орбиты (например, орбиты 202) на орбиту, имеющую большую высоту, (например, орбиту 204) во время процесса поднятия орбиты. В альтернативном варианте реализации спутник 100 может выполнять переход с более высокой орбиты на нижнюю орбиту.
[0051] Показаны вектор 402 орбитальной системы координат и плоскость 404 орбитальной системы координат, аналогичные примерам, описанным выше в связи с ФИГ. 4 и 5. При этом в одном примере по ФИГ. 6 показан вектор (например, результирующий вектор тяги) 602 тяги спутника 100, который соответствует маневру поднятия орбиты от планеты 208. В этом примере спутник 100 имеет главную ось 604 чувствительности, находящуюся в пределах плоскости 404, при этом вектор 602 тяги перпендикулярен главной оси 604 чувствительности, в результате чего происходит уменьшение гравитационных моментов, испытываемых спутником 100 в результате воздействия тяги во время этого приведенного в качестве примера маневра. В результате, уменьшение гравитационных моментов уменьшает количество необходимых маневров двигателей 110 малой тяги и/или устройств, основанных на использовании момента импульса, спутника 100, обеспечивая таким образом большую компактность и/или уменьшение веса спутника 100.
[0052] В этом примере главную ось 604 чувствительности спутника 100 вычисляют с использованием примеров, описанных выше в связи с ФИГ. 4 и 5. В частности, главную ось 604 чувствительности определяют исходя из инерционных характеристик спутника 100. Как указано выше в связи с ФИГ. 5, различия в значениях инерции для различных осей координат приводят к значительному вращательному моменту, испытываемому спутником 100.
[0053] Во время исполнения приведенного в качестве примера маневра под действием тяги по ФИГ. 6, гравитационные моменты, испытываемые спутником 100, уменьшаются (например, минимизируются) исходя из ориентации (например, выравнивания) главной оси 604 чувствительности к плоскости 404 в сочетании с перпендикулярной ориентацией вектора 602 тяги к главной оси 604 чувствительности. В альтернативном варианте реализации главная ось 604 чувствительности может быть ориентирована к вектору 402.
[0054] Поскольку вектор 602 тяги спутника 100 показанного примера перпендикулярен главной оси 604 чувствительности, вращательный момент, испытываемый спутником 100 в результате тяги, которой можно управлять в качестве суммарной общей тяги, минимизирован, например. В некоторых примерах перпендикулярность вектора 602 тяги главной оси 604 чувствительности достигается посредством управления двигателями 110 малой тяги таким образом, что полученная в результате тяга от двигателей 110 малой тяги задает вектор 602 тяги, который перпендикулярен оси 604 чувствительности. Иными словами, направлением тяги можно управлять посредством направленной ориентации по меньшей мере одного из двигателей 110 малой тяги и/или результирующей тяги, полученной от множества двигателей 110 малой тяги, причем этот двигатель не обязательно может быть ориентирован вдоль вектора 602 тяги. В результате этого скоординированного управления двигателями 110 малой тяги, ориентирование вектора тяги и/или результирующего вектора 602 тяги с размещением его относительно близко к центру тяжести спутника 100 и/или с выравниванием с центром тяжести спутника 100 приводит к уменьшению вращательного момента, передаваемого спутнику 100, в результате чего происходит уменьшение необходимого оборудования и/или полезного груза, используемого для противодействия вращательному моменту, который в противном случае испытывал бы спутник 100 во время выполнения маневров с использованием тяги, например. Кроме того, спутники с электрической силовой установкой часто требуют во время перехода на более высокую орбиту раскрытия солнечных панелей, характеризующихся большим суммарным гравитационным моментом. При этом примеры, раскрытые в настоящем документе, могут быть использованы для противодействия инерционным проявлениям в этих раскрытых или развернутых состояниях.
[0055] Приведенный в качестве примера маневр ориентирования и/или создания тяги по ФИГ. 6 может быть выполнен на переходной орбите, при прохождении всей орбиты и/или участка орбиты. Например, управление пространственным положением, описанное в настоящем документе, может быть использовано при прохождении участков конечной орбиты (например, когда спутник 100 приближается к перигею орбиты) вокруг планеты 208. В некоторых примерах приведенный в качестве примера маневр создания тяги выполнен в инерционной системе координат космического тела (например, планеты, Земли, Венеры и т.д.), такой как инерционная система координат Земли (ECI), например.
[0056] Хотя примеры, раскрытые в настоящем документе, иллюстрируют общее выравнивание ориентации (например, точное выравнивание) главных осей чувствительности с плоскостями орбитальной системы координат и/или точную перпендикулярность векторов тяги главным осям чувствительности, полное выравнивание не является необходимым для уменьшения гравитационных моментов, испытываемых спутником 100 в любых примерах, раскрытых в настоящем документе. Так, для уменьшения гравитационных моментов, главная ось 604 чувствительности может быть выровнена/ориентирована в пределах определенной величины к плоскости 404 (например, в пределах 5 градусов) или вектора 402 для уменьшения гравитационных моментов. Аналогично вектор 602 тяги также может являться нормалью к главной оси 604 чувствительности в пределах определенной величины (например, перпендикулярен в пределах 5 градусов главной оси 604 чувствительности). Иными словами, преимущества уменьшения гравитационного момента исходя из примеров, раскрытых в настоящем документе, можно увидеть даже без выполнения точного ориентирования/ выравнивания главной оси 604 чувствительности и вектора 602 тяги. Величина в градусах, с которой главная ось чувствительности ориентирована к плоскости орбитальной системы координат/вектору, и/или с которой вектор тяги представляет собой нормаль к главной оси чувствительности, может варьироваться исходя из характеристик спутника (например, инерционных характеристик) и/или величины в градусах, с которой спутник может маневрировать (например, эффективность тяги и/или устройств, основанных на использовании момента импульса, на спутник).
[0057] На ФИГ. 7 показано упрощенное изображение приведенного в качестве примера спутника 100 по ФИГ. 1, которое иллюстрирует пример направленных осей, связанных с первым приведенным в качестве примера маневром поднятия/снижения орбиты посредством двигателей тяги по ФИГ. 6. На ФИГ. 7 главные оси 702, 704 нечувствительности показаны относительно главной оси 604 чувствительности спутника 100. Главные оси 702, 704 нечувствительности показанного примера являются осями, не испытывающими большого влияния со стороны гравитационных моментов, воздействующих на спутник 100. При этом на главную ось 604 чувствительности могут оказывать значительное воздействие моменты, обусловленные распределением массы спутника 100 вдоль направления y, как обозначено посредством системы координат x, y, z, показанной на ФИГ. 7.
[0058] Для минимизирования вращательного момента, приложенного к спутнику 100, вектор 602 тяги показан ориентированным перпендикулярно главной оси 604 чувствительности. Как указано выше в связи с ФИГ. 6, выравнивание вектора 602 тяги к центру тяжести спутника 100 уменьшает и/или минимизирует величину вращательного момента, приложенного к спутнику 100 вследствие тяги, посредством уменьшения (например, минимизирования) расстояния разделения (например, дельты, расстояния выравнивания) вектора 602 тяги до центра тяжести спутника 100.
[0059] На ФИГ. 8 проиллюстрированы приведенные в качестве примеров векторы и плоскости приведенного в качестве примера спутника 100 второго примера маневра поднятия/снижения орбиты посредством двигателей тяги в соответствии с основными положениями настоящего изобретения. В отличие от примера по ФИГ. 6 и 7, в этом примере, поскольку спутник 100 движется по орбите вокруг планеты 208, спутник 100 не способен вырабатывать вектор 802 тяги с ориентацией, перпендикулярной главной оси 804 чувствительности спутника 100. Неспособность спутника 100 вырабатывать вектор тяги, перпендикулярный главной оси 804 чувствительности, может быть результатом неисправности двигателя малой тяги (например, один или более двигателей малой тяги находятся в нерабочем состоянии и/или повреждены) или конфигурации и/или пространственного расположения двигателей 110 малой тяги, что ограничивает возможности направления суммарной тяги, получаемой вследствие работы двигателей 110 малой тяги.
[0060] В одном примере по ФИГ. 8, спутник 100 сначала поворачивают (например, осуществляют поворачивание) таким образом, что вектор 802 тяги спутника 100 ориентирован к плоскости 404 орбитальной системы координат. Затем спутник 100 осуществляет поворачивание вокруг вектора 802 тяги до тех пор, пока главная ось 804 чувствительности не будет ориентирована к плоскости 404. Как указано выше, вектор 802 тяги показанного примера не перпендикулярен главной оси 804 чувствительности. Однако гравитационный момент, испытываемый спутником 100, все же уменьшается и/или исключается.
[0061] На ФИГ. 9 показан упрощенный вид приведенного в качестве примера спутника 100 по ФИГ. 1, который иллюстрирует пример направленных осей, связанных со вторым приведенным в качестве примера маневром поднятия/снижения орбиты посредством двигателей тяги по ФИГ. 8. Как видно из ФИГ. 9, спутник 100 в этом примере имеет оси 902 и 904 нечувствительности относительно вектора 802 тяги и главной оси 804 чувствительности. В отличие от примера по ФИГ. 6 и 7, вектор 802 тяги не перпендикулярен главной оси 804 чувствительности.
[0062] В одном примере по ФИГ. 9 спутник 100 осуществляет поворачивание (например, непрерывное поворачивание) вокруг вектора 802 тяги для сохранения вектора 802 тяги в пределах плоскости 404 исходя из полученных данных датчика, например. Приведенный в качестве примера спутник 100 также осуществляет поворачивание (например, непрерывное поворачивание, периодическое поворачивание и т.д.) вокруг вектора 802 тяги для сохранения главной оси 804 чувствительности и/или оси чувствительности спутника 100 в пределах плоскости 404. В частности, алгоритм управления может быть использован для поворачивания спутника 100 с учетом текущего или прогнозируемого положения (положений) и/или пространственного положения (положений) спутника 100 на основании полученных данных датчика.
[0063] Как указано выше, примеры, раскрытые в настоящем документе, могут быть использованы в других сферах применения помимо сохранения орбиты или поднятия/снижения орбиты (например, для изменения дальности по орбите/радиуса орбиты). Например, функциональный вектор, такой как направленный вектор связи, вектор направления солнечных панелей, вектор расчетной полезной нагрузки или вектор визуального датчика, может быть направлен/ориентирован в орбитальной системе координат вместо вектора тяги. В зависимости от соответствующей функции, эти векторы могут быть ориентированы относительно главной оси чувствительности (например, перпендикулярно) и/или относительно вектора/плоскости орбитальной системы координат (например, параллельно или в ее пределах), чтобы минимизировать испытываемый гравитационный момент. Например, вектор расчетной полезной нагрузки может быть направлен в сторону космического тела, а ось чувствительности спутника может быть расположена в плоскости орбитальной системы координат. Дополнительно или еще в одном варианте реализации изобретения, функциональный вектор ориентирован/выровнен к плоскости орбитальной системы координат.
[0064] На ФИГ. 10 показана пример спутниковой системы 1000 сохранения энергии, которая может быть использована, чтобы реализовать примеры, раскрытые в настоящем документе. Спутниковая система 1000 сохранения энергии показанного примера, которая реализована на спутнике (например, спутнике 100), имеет систему 1002 наведения спутника, которая включает в себя контроллер 1006 тяги, контроллер 1008 ориентации и интерфейс 1010 датчика. Приведенная в качестве примера система 1000 сохранения энергии также включает в себя линии 1016 связи, которые с возможностью связи соединяют систему наведения (например, систему наведения спутника) 1002, контроллер 1006 тяги и/или интерфейс 1010 датчика с двигателем (двигателями) 110 малой тяги спутника, показанным (показанными) на ФИГ. 1. В этом примере система 1002 наведения 1002 также с возможностью связи соединена с антенной 104, которая, в свою очередь, сообщается с наземной системой 1020 связи планеты 208, вокруг которой спутник движется по орбите). В одном примере по ФИГ. 10 система 1002 наведения с возможностью связи соединена с базой данных 1022 и/или включает в себя базу данных 1022.
[0065] При работе интерфейс 1010 датчика определяет положение и/или пространственное положение приведенного в качестве примера спутника. В частности, интерфейс 1010 датчика определяет положение, пространственное положение и/или вектор скорости/ускорения спутника исходя из данных датчика и/или данных датчика, полученных от наземной системы 1020 связи планеты 208.
[0066] В этом примере спутник следует на более высокую орбиту на основании команд, получаемых от наземной системы 1020 связи с помощью антенны 104. Контроллер 1008 ориентации показанного примера определяет опорную плоскость орбитальной системы координат (например, плоскость 404) на основании вектора (например, вектора 402), заданного от спутника к планете 208. Контроллер 1008 ориентации показанного примера вычисляет главную ось чувствительности спутника. В других примерах контроллер ориентации осуществляет доступ к данным массы/инерции и/или заданной оси чувствительности спутника из базы данных 1022. Еще в одних примерах главная ось чувствительности назначается (например, принимается от, непрерывно принимается от, загружается с) наземной системой 1020 связи. В некоторых примерах контроллер 1008 ориентации показанного примера также вычисляет сдвиг пространственного положения (например, дельты пространственного положения) спутника, необходимый для ориентирования главной оси чувствительности спутника к опорной плоскости орбитальной системы координат. Дополнительно или еще в одном варианте реализации изобретения приведенный в качестве примера контроллер 1008 ориентации вычисляет пространственное положение спутника, в котором главная ось чувствительности ориентирована к опорной плоскости орбитальной системы координат, а вектор тяги спутника перпендикулярен главной оси чувствительности для перемещения спутника на более высокую орбиту при уменьшении (например, минимизировании) гравитационных моментов, действующих на спутник. В некоторых примерах контроллер 1008 ориентации представляет собой интерфейс с ручным управлением через наземную систему 1020 связи, например.
[0067] На основании определенного/вычисленного пространственного положения, контроллер 1006 тяги управляет множеством двигателей малой тяги из двигателей 110 малой тяги спутника для перемещения спутника в определенное/вычисленное пространственное положение, определенное с помощью контроллера 1008 ориентации. В некоторых примерах контроллер 1006 тяги управляет схемой тяги множества двигателей малой тяги и/или импульсами множества двигателей малой тяги для задания результирующего вектора тяги для выполнения маневров, необходимых для корректировки спутника в определенное пространственное положение. Дополнительно или еще в одном варианте реализации изобретения, контроллер 1006 тяги управляет устройством, основанном на использовании момента импульса, таким как устройство, основанное на сохранении момента импульса и/или маховик для изменения пространственного положения спутника.
[0068] В некоторых примерах ось чувствительности спутника вычисляют исходя из текущих условий спутника, которые могут включать в себя выгорание топлива и/или изменения спутника исходя из состояния раскрытости спутника (например, раскрыты или не раскрыты солнечные панели спутника).
[0069] Хотя на ФИГ. 10 показан конкретный пример маневра варианта реализации спутниковой системы 1000 сохранения энергии, один или более элементов, процессов и/или устройств, проиллюстрированных на ФИГ. 10, могут быть скомбинированы, разделены, переставлены, пропущены, исключены и/или реализованы иным образом. Кроме того, приведенная в качестве примера система 1002 наведения спутника, приведенный в качестве примера контроллер 1006 тяги, приведенный в качестве примера контроллер 1008 ориентации и/или приведенная в качестве примера в целом спутниковая система 1000 сохранения энергии по ФИГ. 10, могут быть реализованы аппаратными средствами, средствами программного обеспечения, программно-аппаратными средствами и/или любой комбинацией аппаратных средств, средств программного обеспечения и/или программно-аппаратных средств. Таким образом, например, любой объект из следующих: приведенная в качестве примера система 1002 наведения спутника, приведенный в качестве примера контроллер 1006 тяги, приведенный в качестве примера контроллер 1008 ориентации и/или приведенная в качестве примера в целом спутниковая система 1000 сохранения энергии - может быть реализован одной или большим количеством аналоговых или интегральных схем, логических схем, программируемым процессором (программируемыми процессорами), специализированной интегральной схемой (специализированными интегральными схемами) (ASIC)), программируемым логическим устройством (программируемыми логическими устройствами) (PLD)) и/или логическим устройством, программируемым пользователем, (логическими устройствами, программируемыми пользователем) (FPLD). При анализе любых пунктов формулы по настоящему патенту, относящихся к устройству или системе, с охватыванием чисто программной и/или программно-аппаратной реализации, по меньшей мере один объект из следующих: приведенная в качестве примера система 1002 наведения спутника, приведенный в качестве примера контроллер 1006 тяги и/или приведенный в качестве примера контроллер 1008 ориентации - считается/считаются включающим/включающими материальное машиночитаемое устройство для хранения или диск для хранения, такой как запоминающее устройство, компакт-диск формата DVD, компакт-диск формата CD, компакт-диск формата Blu-ray и т.д., хранящие это программное обеспечение и/или эти программно-аппаратные средства. Кроме того, приведенная в качестве примера спутниковая система 1000 сохранения энергии по ФИГ. 10 может включать в себя один или более элементов, процессов и/или устройств в дополнение к проиллюстрированным на ФИГ. 10 или вместо них, и/или может включать в себя более одного из любых проиллюстрированных элементов, процессов и устройств или все проиллюстрированные элементы, процессы и устройства.
[0070] Структурные схемы представленных приведенных в качестве примеров способов реализации спутниковой системы 1000 сохранения энергии по ФИГ. 10 показаны на ФИГ. 11-13. В этих примерах способы могут быть реализованы с использованием машиночитаемых команд, которые содержат программу для исполнения процессором, таким как процессор 1412, показанный в примере процессорной платформы 1400, раскрытой ниже в связи с ФИГ. 14. Программа может быть воплощена в программном обеспечении, сохраненном на материальном машиночитаемом носителе для хранения, таком как компакт-диск CD-ROM только для чтения, гибкий диск, жесткий диск, компакт-диск формата DVD, компакт-диск формата Blu-ray или запоминающее устройство, связанное с процессором 1412, однако в альтернативном варианте реализации изобретения вся программа и/или ее части может быть выполнена или могут быть выполнены посредством устройства, отличного от процессора 1412 и/или воплощена или воплощены в программно-аппаратных средствах (firmware) или специально выполненных аппаратных средствах. Кроме того, хотя приведенная в качестве примера программа описана в отношении структурной схемы, проиллюстрированной на ФИГ. 11-13, могут быть использованы многие другие альтернативные способы реализации примера спутниковой системы 1000 сохранения энергии. Например, порядок исполнения блоков может быть изменен, и/или некоторые из блоков, описанных здесь, могут быть изменены, удалены или скомбинированы.
[0071] Как указано выше, приведенные в качестве примера способы по ФИГ. 11-13 могут быть реализованы с использованием кодированных команд (например, компьютеро- и/или машиночитаемых команд), сохраненных на материальном машиночитаемом носителе для хранения, таком как дисковод жесткого диска, флэш-память, оперативное запоминающее устройство (ROM), компакт-диск (CD), компакт-диск формата DVD, кэш-память, постоянное запоминающее устройство (RAM) и/или любое другое устройство для хранения или диск для хранения, на котором информация может храниться в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, для коротких примеров, для временной буферизации и/или для "кэширования информации). При использовании в настоящем документе термин "материальный машиночитаемый носитель для хранения" явным образом означает включение любого типа машиночитаемого устройства для хранения и/или диска для хранения и исключение распространяющихся сигналов и средств передачи. При использовании в настоящем документе термины "материальный машиночитаемый носитель для хранения" и "материальный компьютерочитаемый носитель для хранения" используются взаимозаменяемо. Дополнительно или еще в одном варианте реализации изобретения, приведенные в качестве примера способы по ФИГ. 11-13 могут быть реализованы с использованием кодированных команд (например, компьютеро- и/или машиночитаемых команд), сохраненных на энергонезависимом компьютеро- и/или машиночитаемом носителе, таком как дисковод жесткого диска, флэш-память, оперативное запоминающее устройство, компакт-диск, компакт-диск DVD, кэш-память, постоянное запоминающее устройство и/или любое другое устройство для хранения или диск для хранения, на котором информация может храниться в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, для коротких экземпляров или копий, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "энергонезависимый машиночитаемый носитель" явным образом означает включение любого типа машиночитаемого устройства для хранения и/или диска для хранения и исключение распространяющихся сигналов, и средств передачи. При использовании в настоящем документе там, где выражение "по меньшей мере" используется в качестве переходного выражения в ограничительной части пункта формулы изобретения, оно является открытым в том смысле, в котором является открытым термин "содержащий".
[0072] Приведенный в качестве примера способ по ФИГ. 11 начинают блоком 1100, в котором спутник, например спутник 100, выполняет маневрирование и/или ориентирование для уменьшения гравитационного момента (гравитационных моментов), действующего (действующих) на спутник со стороны космического тела (например, планеты 208) (блок 1100). В частности, спутник движется по орбите вокруг космического тела (например, конечной орбите) и может собираться занимать более высокую орбиту для выполнения функций (например, связи, сбора информации и т.д.) на более высокой орбите.
[0073] В одном примере по ФИГ. 11 определяют положение и ориентацию/пространственное положение спутника (блок 1102). Например, интерфейс датчика, такой как интерфейс 1010 датчика, может собирать и/или накапливать данные датчика для определения относительного положения и пространственного положения спутника относительно космического тела. В некоторых примерах определяют прогнозируемые скорость и/или пространственное положение спутника (например, прогнозируемые в зависимости от времени) исходя из текущих условий движения спутника и/или относительного положения спутника у космического тела.
[0074] В некоторых примерах вычисляют ось чувствительности спутника (блок 1104). В частности, данные о массе/инерции спутника могут быть использованы для определения оси чувствительности. В других примерах главная ось чувствительности является заданной и/или известна исходя из конструкции спутника. Дополнительно или еще в одном варианте реализации изобретения, вычисляют ось чувствительности исходя из обновленных массовых/инерционных характеристик, которые соответствуют текущим условиям спутника (например, выгорания топлива, обновленных условий спутника и т.д.).
[0075] Далее спутник показанного примера выполняет маневрирование и/или ориентирование таким образом, что ось чувствительности ориентирована с определенной плоскостью орбитальной системы координат (например, плоскостью 404) (блок 1106). В альтернативном варианте реализации, ось чувствительности ориентирована к вектору орбитальной системы координат (например, вектору 402).
[0076] В некоторых примерах, при перемещении спутника на другую орбиту (например, при поднятии орбиты) вектор тяги (например, вектор 602 тяги) спутника ориентирован перпендикулярно главной оси чувствительности (блок 1107). В некоторых примерах вектор тяги ориентирован перпендикулярно главной оси чувствительности одновременно с ориентированием оси чувствительности спутника к плоскости орбитальной системы координат (например, во время одного и того же маневра).
[0077] В примерах, где спутник перемещают на другую орбиту, после ориентирования спутника, работают двигателем малой тяги или другим устройством обеспечения движения спутника или приводят этот двигатель или устройство в действие для изменения пространственного положения спутника на орбите (блок 1108). В некоторых примерах этим двигателем малой тяги одновременно работают для выполнения маневра по поднятию орбиты во время ориентирования спутника (блоки 1106 и/или 1107) и затем процесс завершают (блок 1110). В альтернативном варианте реализации активируют множество двигателей малой тяги для получения результирующего вектора тяги, перпендикулярного главной оси чувствительности.
[0078] На ФИГ. 12 представлена структурная схема другого приведенного в качестве примера способа, реализующего примеры, раскрытые в настоящем документе. В примере способа по ФИГ. 12 спутник, движущийся по орбите вокруг космического тела, претерпевает поднятие орбиты, но имеет ограниченные возможности маневрирования под действием тяги и/или ограниченную ориентацию, обусловленную двигателями малой тяги. Приведенный в качестве примера способ по ФИГ. 12 начинают блоком 1200, при реализации которого спутник начинает маневр поднятия орбиты (блок 1200).
[0079] Определяют первое положение и первую ориентацию/пространственное положение спутника (блок 1202). Затем спутник выполняет маневрирование и/или ориентирование (например, осуществляет поворачивание) таким образом, что вектор тяги спутника находится в пределах определенной плоскости орбитальной системы координат (например, плоскости 404) (блок 1204). Например, плоскость орбитальной системы координат может быть определена контроллером ориентации (например, контроллером 1008 ориентации) приведенного в качестве примера спутника в зависимости от времени. В этом примере плоскость орбитальной системы координат показанного примера определяют как функцию положения спутника, которая изменяется с течением времени.
[0080] В одном примере по ФИГ. 12 спутник осуществляет поворачивание вокруг вектора тяги (например, поворот вокруг вектора тяги) таким образом, что ось чувствительности спутника ориентирована к определенной плоскости орбитальной системы координат (блок 1206).
[0081] После совершения маневра спутником определяют второе положение и вторую ориентацию спутника через интерфейс датчика, например интерфейс 1010 датчика (блок 1208). В некоторых примерах наземная система космического тела определяет положение и ориентацию спутника посредством системы связи, такой как наземная система 1020 связи, например.
[0082] Затем определяют необходимость дополнительной корректировки спутника (блок 1210). В некоторых примерах это определение выполняют посредством анализирования необходимости непрерывной корректировки пространственного положения спутника (например, при прохождении участка орбиты) и/или того, отклоняется ли спутник от запланированной траектории.
[0083] Если определено, что для спутника необходима дополнительная корректировка (блок 1210), процесс возвращается к блоку 1202. Если определено, что для спутника дополнительная корректировка не нужна (блок 1210), приведенный в качестве примера процесс завершают (блок 1212).
[0084] На ФИГ. 13 представлена структурная схема еще одного приведенного в качестве примера способа, реализующего примеры, раскрытые в настоящем документе. Приведенный в качестве примера способ начинают блоком 1300, в котором приведенный в качестве примера спутник, движущийся по орбите вокруг космического тела, находится на конечной орбите (блок 1300). Однако спутник совершает маневр при прохождении участков орбиты для минимизирования и/или уменьшения гравитационных моментов, испытываемых спутником.
[0085] В одном примере по ФИГ. 13 определяют первое пространственное положение спутника (блок 1302). Это определение может происходить посредством связи с датчиками интерфейса датчика (например, интерфейса 1010 датчика) и/или наземными средствами связи (например, системами 1020 связи).
[0086] Затем определяют ось чувствительности (например, главную ось чувствительности) спутника (блок 1303). В некоторых примерах ось чувствительности вычисляют исходя из текущих условий спутника (например, положения развертывания, выгорания топлива и т.д.).
[0087] В одном примере по ФИГ. 13 плоскости орбитальной системы координат вычисляют исходя из матрицы преобразования в орбитальную систему координат (блок 1304). Например, плоскость орбитальной системы координат может быть основана на векторе, направленном от центра тяжести спутника к центру тяжести космического тела, вокруг которого спутник движется по орбите.
[0088] В одном примере по ФИГ. 13 определяют/вычисляют второе пространственное положение спутника для ориентирования оси чувствительности спутника к плоскости орбитальной системы координат (например, плоскости 404) (блок 1306). Например, контроллер ориентации, такой как контроллер 1008 ориентации, может рассчитать изменение пространственного положения (например, дельту) для спутника. В некоторых примерах вычисленное изменение пространственного положения может быть рассчитано в зависимости от времени.
[0089] Исходя из второго пространственного положения спутника, двигатель малой тяги и/или устройство, основанное на использовании момента импульса, (например, маховик) спутника управляется контроллером тяги, таким как контроллер 1006 тяги, для перемещения спутника во второе пространственное положение (блок 1307).
[0090] Далее определяют необходимость дополнительной корректировки пространственного положения спутника (блок 1308). Если дополнительная корректировка пространственного положения спутника необходима (блок 1308), процесс возвращается к блоку 1302. В альтернативном варианте реализации, если дополнительная корректировка не нужна (блок 1308), процесс завершают (блок 1310).
[0091] На ФИГ. 14 показана блок-схема примера процессорной платформы 1400, выполненной с возможностью исполнения приведенных в качестве примера способов по ФИГ. 11-13, реализующих пример спутниковой системы 1000 сохранения энергии по ФИГ. 10. Процессорная платформа 1400 может представлять собой, например, сервер, личный компьютер, мобильное устройство (например, персональный цифровой помощник (PDA), Интернет-устройство или компьютерное устройство любого другого необходимого типа.
[0092] Процессорная платформа 1400 показанного примера включает в себя процессор 1412. Процессор 1412 показанного примера является аппаратным средством. Например, процессор 1412 может быть реализован одним или большим количеством интегральных схем, логических схем, микропроцессоров или контроллеров любого необходимого типа или производителя.
[0093] Процессор 1412 показанного примера включает в себя локальное запоминающее устройство 1413 (например, кэш-память). Приведенный в качестве примера процессор 1412 также включает в себя контроллер 1005 тяги, контроллер 1008 ориентации и интерфейс 1010 датчика. Процессор 1412 показанного примера сообщается с основным запоминающим устройством, в том числе с энергозависимым запоминающим устройством 1414 и энергонезависимом запоминающим устройством 1416 через шину 1418. Энергозависимое запоминающее устройство 1414 может быть реализовано оперативным запоминающим устройством с синхронной динамической памятью (SDRAM), оперативным запоминающим устройством с динамической памятью (DRAM), запоминающим устройством с синхронной оперативной видеопамятью компании Rambus с передачей данных по фронту и спаду синхроимпульса (RDRAM) и/или оперативным запоминающим устройством любого другого необходимого типа. Энергонезависимое запоминающее устройство быть реализовано с помощью флэш-памяти и/или запоминающего устройства любого другого необходимого типа. Доступ к основному запоминающему устройству 1414, 1416 управляется контроллером запоминающего устройства.
[0094] Процессорная платформа 1400 показанного примера также включает в себя интерфейсную схему 1420. Интерфейсная схема 1420 может быть реализована посредством стандарта интерфейса любого типа, такого как интерфейс Ethernet, универсальная последовательная шина (USB), и/или интерфейс PCI express.
[0095] В показанном примере одно или более устройств 1422 ввода соединены с интерфейсной схемой 1420. Устройство (устройства) 1422 ввода обеспечивает (обеспечивают) возможность пользователю вводить данные и команды в процессор 1412. Устройство (устройства) ввода может (могут) быть реализовано (реализованы), например, датчиком звука, микрофоном, камерой (неподвижного изображения или видео), клавиатурой, кнопкой, мышью, сенсорным экраном, сенсорной площадкой, трекболом, средствами isopoint и/или системой голосового распознавания.
[0096] Одно или более устройств 1424 вывода также соединены с интерфейсной схемой 1420 показанного примера. Устройства 1424 вывода могут быть реализованы, например, дисплейными устройствами (например, светоизлучающим диодом (LED), органическим светоизлучающим диодом (OLED), жидкокристаллическим дисплеем, дисплеем с электронно-лучевой трубкой (CRT), сенсорным экраном, устройством тактильного вывода, принтером и/или громкоговорителями). Интерфейсная схема 1420 показанного примера, таким образом, обычно включает в себя карту с графическим драйвером, чип с графическим драйвером или процессор с графическим драйвером.
[0097] Интерфейсная схема 1420 показанного примера также включает в себя устройство связи, такое как передатчик, приемник, приемо-передающее устройство, модем и/или сетевую интерфейсную карту, для облегчения обмена данными с внешними устройствами (например, компьютерными устройствами любого вида) через сеть 1426 (например, соединение Ethernet, цифровую абонентскую линию (DSL), телефонную линию, коаксильный кабель, систему сотовой телефонии и т.п.).
[0098] Процессорная платформа 1400 показанного примера также включает в себя одно или большее количество запоминающих устройств 1428 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 1428 большой емкости включают в себя дисководы гибкого диска, дисководы жесткого диска, приводы компакт-дисков, приводы компакт-дисков формата Blu-ray, системы типа RAID на основе матрицы независимых дисковых накопителей с избыточностью и приводы компакт-дисков формата DVD.
[0099] Кодированные команды 1432 для реализации способов по ФИГ. 11-3 могут быть сохранены на запоминающем устройстве 1428 большой емкости, в энергозависимом запоминающем устройстве 1414, в энергонезависимом запоминающем устройстве 1416 и/или на съемном материальном машиночитаемом носителе для хранения, таком как CD или DVD.
[00100] С учетом изложенного выше, следует отметить, что раскрытые выше способы и устройства обеспечивают энергоэффективные операции спутников/объектов, постоянно находящихся в космическом пространстве, обеспечивая таким образом большую компактность и экономию веса спутников/объектов, постоянно находящихся в космическом пространстве. Повышенная компактность и уменьшение веса приводят к меньшим требованиям по полезной нагрузке для соответствующих средств выведения в космос.
[00101] Хотя в настоящем документе были раскрыты конкретные приведенные в качестве примера способы и устройства, объем настоящего изобретения не ограничен ими. Наоборот, настоящее изобретение включает в себя все способы, устройства и изделия, явным образом охватываемые формулой изобретения настоящего патента. Несмотря на использование в описании спутников, приведенные в качестве примера способы и устройства могут применяться для транспортных средств, аэродинамических конструкций и т.п.
Группа изобретений относится к искусственным спутникам, маневрирующим в области околопланетных орбит. Способ включает маневр приведения главной оси чувствительности (ГОЧ) спутника (по которой на спутник действует максимальный гравитационно-градиентный вращательный момент) в плоскость орбитальной системы координат. Данная плоскость проходит через центр притяжения спутника и перпендикулярна радиусу-вектору орбиты. Вектор тяги двигательной установки (в частности малой тяги) может быть ориентирован перпендикулярно ГОЧ. Маневр приведения ГОЧ в плоскость орбитальной системы координат может быть проведён с помощью маховичной системы ориентации. Устройство для осуществления способа включает в себя необходимые контрольные и исполнительные элементы. Технический результат состоит в обеспечении энергоэффективности орбитальных операций, возможности снижения массы и габаритов служебных систем спутников, а также требований к средствам выведения. 2 н. и 10 з.п. ф-лы, 14 ил.
1. Способ управления маневрированием спутника, включающий:
маневрирование спутником, вращающимся по орбите вокруг космического тела, с тем чтобы сориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат для уменьшения гравитационных моментов, действующих на спутник,
причем плоскость орбитальной системы координат задана по центру тяжести спутника и перпендикулярна вектору орбитальной системы координат,
при этом вектор орбитальной системы координат задан от центра тяжести космического тела до центра тяжести спутника, а главная ось чувствительности представляет собой ось спутника, относительно которой градиент силы тяжести развивает максимальный вращательный момент, действующий на спутник.
2. Способ по п. 1, согласно которому маневрирование спутником включает поворот спутника вокруг вектора тяги спутника.
3. Способ по п. 1 или 2, согласно которому вектор тяги спутника ориентирован так, чтобы быть перпендикулярным главной оси чувствительности.
4. Способ по п. 1 или 2, также включающий определение главной оси чувствительности.
5. Способ по п. 1 или 2, согласно которому маневрирование спутником включает приведение в действие по меньшей мере одного двигателя малой тяги или устройства, основанного на сохранении момента импульса.
6. Способ по п. 1 или 2, согласно которому ориентирование спутника происходит при прохождении участка орбиты.
7. Устройство для управления маневрированием спутника, содержащее:
устройство для маневрирования спутника и
контроллер ориентации, выполненный с возможностью побуждать устройство для маневрирования ориентировать главную ось чувствительности спутника к плоскости орбитальной системы координат для уменьшения гравитационных моментов, действующих на спутник,
причем плоскость орбитальной системы координат задана по центру тяжести спутника и перпендикулярна вектору орбитальной системы координат,
при этом вектор орбитальной системы координат задан от центра тяжести космического тела до центра тяжести спутника, а главная ось чувствительности представляет собой ось спутника, относительно которой градиенты силы тяжести развивают максимальный вращательный момент, действующий на спутник.
8. Устройство по п. 7, в котором контроллер ориентации выполнен с возможностью побуждать устройство для маневрирования ориентировать функциональный вектор спутника в плоскости орбитальной системы координат.
9. Устройство по п. 8, в котором функциональный вектор включает в себя вектор тяги.
10. Устройство по любому из пп. 7, 8 и 9, в котором устройство для маневрирования включает в себя двигатель малой тяги.
11. Устройство по п. 10, в котором контроллер ориентации выполнен с возможностью побуждать двигатель малой тяги ориентировать вектор тяги спутника перпендикулярно главной оси чувствительности.
12. Устройство по любому из пп. 7, 8, 9 и 11, в котором устройство для маневрирования включает в себя устройство, основанное на сохранении момента импульса.
| Итоги науки и техники | |||
| Исследование космического пространства | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Вопросы ориентации искусственных спутников (авт | |||
| д | |||
| ф-м н | |||
| В.А | |||
| Сарычев) | |||
| М., ВИНИТИ, 1978, с.8, 14-15, 79-81,176-181 | |||
| US 20080128559 А1, 05.06.2008 | |||
| US 6017001 A, 25.01.2000 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2309876C1 |
| US 4728061 A, 01.03.1988. | |||

