Заявленное техническое решение относится к агрегатам и способам приведения в движение тела и может быть использованным в воздушных и транспортных средствах.
В основе заявленного технического решения лежит принцип действия движителя, который характеризуется отталкиванием от среды. Более детально принцип будет разъяснен при раскрытии составляющих движителя и принципа работы технического решения.
Из уровня техники известна разработка компании Festo (http://www.upstreamnews.org/blog/2015/03/28/cooperative-ants-and-swarming-butterflies-are-the-latest-in-insect-inspired-robotics/). Согласно раскрытой информации об этой разработке, воплощен двигатель, который перемещает центр тела в среде за счет махов крыльев. При каждом движении крыльев создается зона увеличенного давления в направлении движения крыла, независимо от самого направления движения крыла. Поэтому, во время движения крыла вверх, центр тела перемещается вниз. При таком перемещении крыло выполняет дополнительный волнообразное движение для компенсации перемещения центра тела вниз. Указанное решение имеет невысокое значение акустического шума. Однако невозможно соблюдение стабильной траектории, поэтому применение данного решения в условиях турбулентности или осадков невозможно.
Из уровня техники известны решения орнитоптеров, которые используют крылья для создания подъемной силы (https://tvrain.ru/articles/ornitopter-412772/, https://www.youtube.com/watch?v=a-qS7oN-3tA). Однако данные решения не позволяют обеспечить выполнение точного маневрирования, в том числе обеспечить замирания («зависания») в среде.
Также из уровня техники известен патент Франции FR129091, 1962 г., в котором описан корабельный движитель, содержащий раму, которая соединена с приводом возвратно-поступательного перемещения, в которой на шарнирах установлены пластины-лопасти различной длины, перекрывающие друг друга в рабочем положении с образованием вертикальной стенки.
Данное техническое решение обеспечивает движение тела в водной среде. Этот двигатель имеет высокогабаритную конструкцию, которая имеет значительный вес.Из-за сложности данной конструкции она имеет недостаточную надежность. Также к недостаткам известного решения относится низкая маневренность.
Данное техническое решение принято в качестве ближайшего аналога. Общими признаками известного решения с заявленным движителем являются следующие: движитель тела, содержащий корпус и по меньшей мере один привод, жестко закрепленный в корпусе, причем привод имеет рабочий орган, выполненный с возможностью совершать возвратно-поступательное движение.
В основу заявленного технического решения поставлена задача по увеличению надежности и безопасности движителя и упрощение его конструкции. Как видно из рассматриваемого уровня техники, существует потребность в создании движителя с низким уровнем шума в рабочем состоянии, которому присущи легкость и простота управления. Кроме того, задачей данного технического решения является разработка движителя и способа приведения в движение тела, где движитель использует в качестве среды воздух и воду.
Поставленная задача решается за счет того, что движитель тела, имеющего корпус, где движитель содержит привод, жестко закрепленный с корпусом, и рабочий орган, выполненный с возможностью совершать возвратно-поступательное движение,
согласно с техническим решением,
привод связан со средством приведения в действие рычага, с которым соединен первый конец рычага,
второй конец рычага соединен с рабочим органом, при этом рычаг выполнен с возможностью придавать во время работы средства приведения в действие рычага возвратно-поступательное движение рабочему органу,
в качестве рабочего органа используется поршень, который имеет переднюю часть, среднюю часть и заднюю часть, где передняя часть объединена со вторым концом рычага, средняя часть размещена в держателе, а задняя часть поршня имеет лопасти, выполненные с возможностью раскрываться во время движения поршня в направлении, противоположном к ожидаемому направлению движения тела, с образованием в конечном положении по меньшей мере одной лопастью поверхности, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов,
и с возможностью складываться во время движения поршня в начальное положение,
причем лопасти прикреплены к поршню и к первому концу штанг, второй конец которых прикреплен к муфте, размещенной на поршне с возможностью совершения возвратно-поступательное движения вдоль оси поршня, причем на поршне размещены два ограничителя для ограничения движения муфты вдоль поршня, причем средняя часть поршня по меньшей мере частично размещена в держателе, который размещен на теле, где держатель выполнен с возможностью обеспечения возвратно-поступательного движения поршня вдоль оси, которая совпадает с осью держателя.
Согласно еще одному варианту воплощения, второй конец рычага имеет полость, в которую вставлен ролик, к которому присоединена передняя часть поршня, причем ролик выполнен с возможность перемещения вдоль оси рычага, причем рычаг закреплен с возможностью вращения на корпусе,
кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
Согласно еще одному варианту воплощения, привод является генератором электромагнитного поля, средство привидения в действие рычага является парой движительных электромагнитов, а первый конец рычага содержит постоянные магниты, обращенные к каждой из пары движительных электромагнитов разной полярности, причем рычаг закреплен с возможностью вращения на корпусе,
кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
Согласно еще одному варианту воплощения, привод является вращательным двигателем, средство приведения в действие рычага является маховиком с выступающим роликом, а первый конец рычага имеет полость, в которую вставлен выступающий ролик, который выполнен с возможностью перемещаться радиально относительно оси маховика и возвратно-поступательно относительно оси рычага, причем рычаг закреплен с возможностью вращения на корпусе,
кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
Также, согласно еще одному варианту воплощения, ограничители выполнены с возможностью перемещения вдоль оси поршня для уменьшения амплитуды раскрытия лопастей задней части поршня.
Кроме того, согласно еще одному варианту воплощения, штанги выполнены телескопическими, причем штанги содержат дистанционно управляемый пусковой механизм, который выполнен с возможностью управления степенью выдвижения та складывания штанги.
Согласно другому варианту выполнения движителя, движитель тела, который имеет корпус, где движитель содержит привод, жестко закрепленный с корпусом, и рабочий орган, выполненный с возможностью совершать возвратно-поступательное движение,
согласно с техническим решением,
привод связан со средством приведения в действие рычага, с которым соединен первый конец рычага,
второй конец рычага соединен с рабочим органом, при этом рычаг выполнен с возможностью придавать во время работы средства приведения в действие рычага возвратно-поступательное движение рабочему органу,
в качестве рабочего органа использован поршень, который имеет переднюю часть, среднюю часть и заднюю часть, где передняя часть объединена с вторым концом рычага, средняя часть размещена в держателе, а задняя часть поршня имеет лопасти, выполненные с возможностью раскрываться во время движения поршня в направлении, противоположном к ожидаемому направлению движения тела, с образованием в конечном положении не менее одной лопастью поверхности, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов,
и с возможностью складываться во время движения поршня в начальное положение,
причем лопасти прикреплены к поршню и к первому концу штанг, второй их конец прикреплен, через вспомогательный рычаг управления к муфте, размещенной на поршне с возможностью совершения возвратно-поступательного движения вдоль оси поршня, причем второй конец штанг и вспомогательный рычаг управления соединены с вторыми концами штанг управления лопастями, которые размещены вдоль поршня, а каждый из первых концов штанг управления лопастями соединен с соответствующим усилителем движения, которые выполнены вращательными, каждый из которых закреплен в вращаемом держателе, который неподвижно закреплен на корпусе, причем усилители движения соединены с блоком асинхронного управления, с которым объединен датчик движения.
Согласно еще одному варианту выполнения движителя, второй конец рычага имеет полость, в которую вставлен ролик, к которому присоединена передняя часть поршня, причем ролик выполнен с возможностью перемещения вдоль оси рычага, причем рычаг закреплен с возможностью вращения на корпусе,
кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
Согласно другому варианту выполнения движителя, привод является вращательным двигателем, средство приведения в действие рычага является маховиком с выступающим роликом, а первый конец рычага имеет полость, в которую вставлен выступающий ролик, который выполнен с возможностью перемещаться радиально относительно оси маховика и возвратно-поступательно относительно оси рычага, причем рычаг закреплен с возможностью вращения на корпусе,
кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
Также, согласно еще одному варианту воплощения, на поршне размещены два ограничители для ограничения движения муфты вдоль поршня, причем ограничители выполнены с возможностью перемещения вдоль оси поршня для уменьшения амплитуды раскрытия лопастей задней части поршня.
Согласно еще одному варианту выполнения движителя, на краях лопастей выполнены выступы, которые размещены под углом к плоскости лопастей, и загнуты в направлении от штанг.
Также, согласно еще одному варианту воплощения, держатель выполнен с возможностью перемещения в направлении, перпендикулярном оси поршня, кроме того, корпус имеет заглубление, в которое беспрепятственно входит держатель и поршень.
Также поставленная задача достигается за счет того, что способ движения тела, который отличается тем, что
обеспечивают возвратно-поступательное движение поршня снаружи корпуса тела, где возвратно-поступательное движение поршня характеризуется рабочей фазой, которая определяется направлением движения поршня, противоположным к ожидаемому направлению движения тела, и нейтральной фазой, которая определяется направлением движения поршня в начальное положение,
причем поршень имеет переднюю часть и заднюю часть, где задняя часть поршня имеет лопасти, которые раскладываются во время движения поршня в рабочей фазе, с образованием в конечном положении не менее одной лопастью поверхности, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов,
и складывают во время движении поршня в нейтральной фазе,
обеспечивают в рабочей фазе отталкивание поршня от среды разложенными лопастями и перемещение корпуса тела от поршня за счет движения рычага, соединенного с передней частью поршня.
Также поставленная задача достигается за счет того, что способ движения тела, по которому, согласно с техническим решением,
обеспечивают возвратно-поступательное движение поршня снаружи корпуса тела, где возвратно-поступательное движение поршня характеризуется рабочей фазой, которая определяется направлением движения поршня, противоположным к ожидаемому направлению движения тела, и нейтральной фазой, которая определяется направлением движения поршня в начальное положение,
причем поршень имеет переднюю часть и заднюю часть, где задняя часть поршня имеет лопасти, которые раскладываются во время движения поршня в рабочей фазе, с образованием в конечном положении не менее одной лопастью поверхности, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов,
и складывают во время движении поршня в нейтральной фазе,
обеспечивают в рабочей фазе отталкивание поршня от среды разложенными лопастями и перемещение корпуса тела от поршня за счет движения рычага, соединенного с передней частью поршня.
Технический результат, который достигается при использовании заявленного технического решения, состоит в упрощении конструкции движителя, увеличении надежности, минимизации влияния турбулентных явлений на выходную мощность, уменьшении нежелательных отклонений от заданной траектории движения с одновременным увеличением возможности маневрирования.
Суть заявленного технического решения объяснена с помощью прилагаемых чертежей, которые, однако, ни в коем случае не ограничивают возможность реализации заявленного движителя, его размещения и способа движения тела. То есть, чертежи не считаются такими, что ограничивают варианты воплощения заявленного движителя с раскрытыми и изображенными вариантами воплощения. Элементы и составные части движителя изображены для наглядного объяснения его сути, поэтому соблюдение масштабов не ставилось в виде задачи при формировании чертежей.
На Фиг. 1 изображен вариант выполнения движителя, в котором привод выполнен в виде вращательного двигателя.
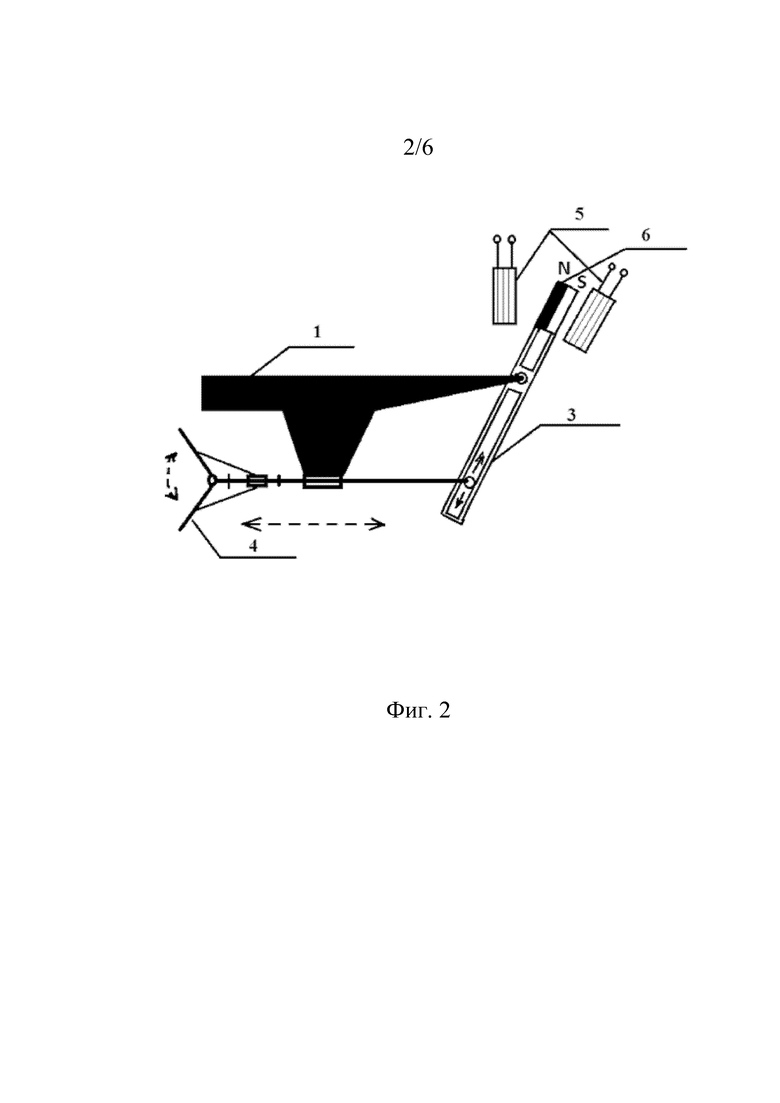
На Фиг. 2 изображен вариант выполнения движителя, в котором привод выполнен в виде генератора электромагнитного поля.
На Фиг. 3 изображено положение плоскости лопастей относительно оси поршня во время рабочей фазы.
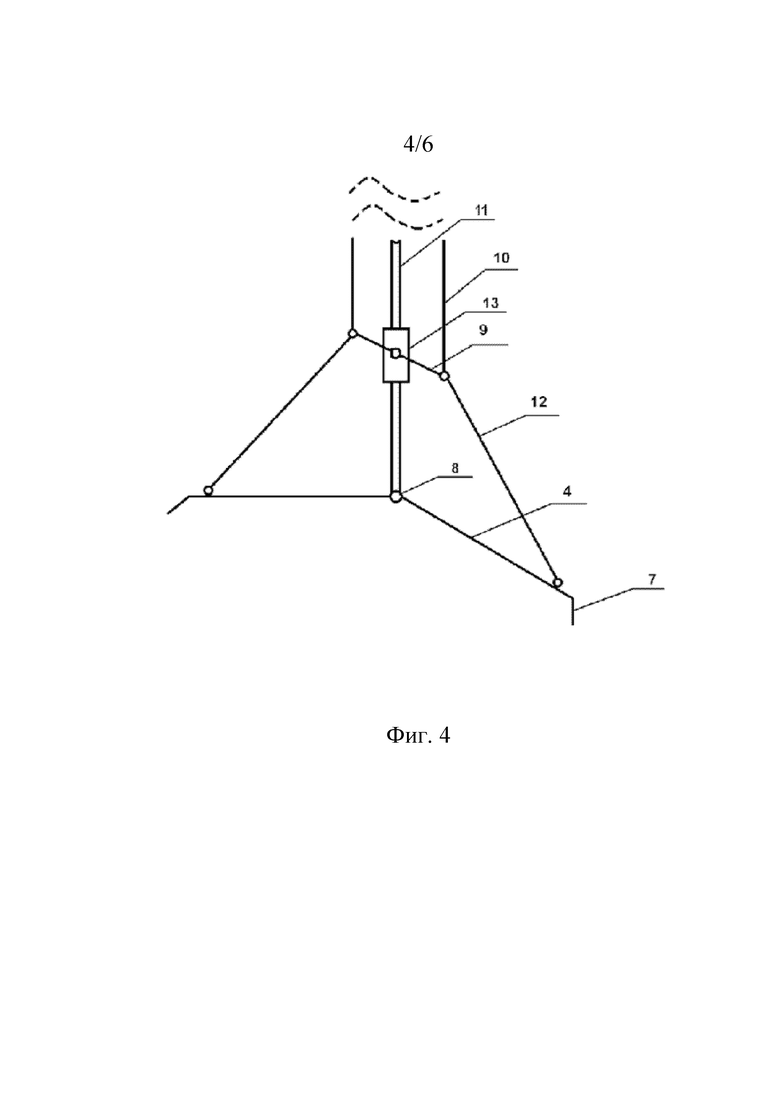
На Фиг. 4 изображен момент передачи смещения штанг управления лопастями относительно оси поршня во время рабочей фазы.
На Фиг. 5 изображено положение лопастей во время нейтральной фазы.
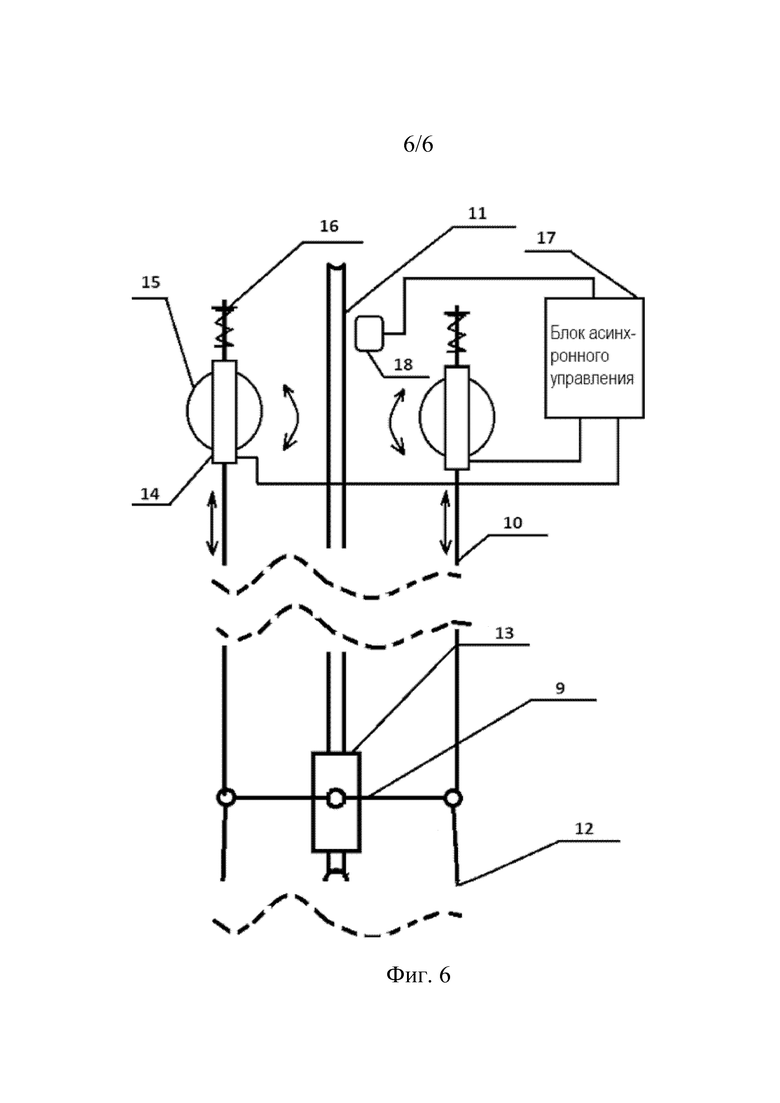
На Фиг. 6 изображено присоединение каждого из первых концов штанг управления лопастями с соответствующим усилителем движения.
На чертежах использованы следующие обозначения:
1 - корпус тела
2 - двигатель
3 - рычаг
4 - лопасти поршня
5 - движущие электромагниты
6 - постоянные магниты
7 - выступ лопастей
8 - шарнирные соединения
9 - вспомогательный рычаг управления
10 - штанга управления лопастями
11 - поршень
12 - штанга
13 - муфта
14 - усилитель движения
15- вращательный держатель
16- отбойник-амортизатор
17- блок асинхронного управления
18 - датчик движения
Далее будет приведена причинно-следственная связь между совокупностью признаков заявленных объектов и техническим результатом. Так как заявленные движитель и способ могут быть модифицированными и иметь альтернативные варианты выполнения, приведенное далее описание приведено в качестве примера для характеристики его сути и возможности его осуществления. Должно быть очевидным, что предоставленное детальное описание не предназначено для ограничения сути заявленного технического решения приведенными отдельными вариантами воплощения, а наоборот, включает все модификации, эквиваленты и альтернативы, подпадающие под суть и объем патентной охраны, что изложено в приведенной формуле.
Заявленный движитель предназначен для обеспечения движения тела в воздушной и в водной рабочий средах. Способ движения тела предназначен обеспечить перемещение тела в воздушной и водной рабочей среде. При изменении рабочей среды ни движитель, ни способ не требуют изменений и модификаций и могут быть адаптированы для такого изменения в пределах свойственной им совокупности существенных признаков. Это указывает на расширение функциональных возможностей движителя.
Заявленный движитель крепится к корпусу тела, подлежащего перемещению. Под телом следует понимать судно водного транспорта и судно воздушного транспорта. Место и порядок крепления движителя будут понятными специалисту в данной области на основе приведенного ниже подробного описания. Корпус тела выполнен из типичного для таких изделий материала. Особенности строения корпуса, связанные с работой движителя, приведены ниже.
Движитель содержит привод, жестко закрепленный с корпусом. Далее будет описана конструкция с одним движителем, однако специалисту на основе данного описания будет понятна возможность применения более чем одного движителя с одним телом. Количество движителей, закрепленных на теле, зависит от ожидаемых значений, описывающих движение тела: скорости, грузоподъемности, маневрирования и тому подобного. Возможность и порядок применения более одного движителя на одном корпусе тела приведена ниже.
Привод связан со средством приведения в действие рычага. Под приводом следует понимать источник энергии, которая направлена на создание усилия, приложенного к первому концу рычага, для приведения его в движение.
Согласно одному варианту движителя, изображенного на Фиг. 1, привод является вращательным двигателем. На выходе вращательного двигателя получают крутящий момент, который приложен к средству приведения в действие рычага. Рычаг выполнен с возможностью вращения при обеспечении первому концу рычага усилия от привода. На Фиг. 1 в качестве средства приведения в действие рычага изображен маховик с выступающим роликом. Выступающий ролик преимущественно размещен на периферийном крае маховика. Согласно данному варианту воплощения, первый конец рычага имеет полость, в которую вставлен выступающий ролик. Таким образом, выступающий ролик характеризуется тем, что имеет траекторию круга, то есть выполнен с возможностью перемещаться радиально относительно оси маховика. В то же время выступающий ролик характеризуется возвратно-поступательным движением относительно оси рычага. Таким образом обеспечивается колебания рычага.
В этом варианте выполнения также предусмотрено изменение частоты колебаний рычага и величины предоставленного ему момента силы за счет введения коробки передач, установленной между вращательным двигателем и маховиком, и изменения скорости вращения вала двигателя. Изменение частоты и крутящего момента на выходе коробки передач соответственно влияет на частоту движений рычага, и соответственно на скорость движения рабочего органа.
Согласно еще одному варианту движителя, изображенного на Фиг. 2, приводом является генератор электромагнитного поля. Ко входу генератора приложено напряжение, которое подается через управляемое средство коммутации. Таким средством может быть реле, переключатель, контроллер и тому подобное. Назначение средства коммутации заключается в управляемом переключении напряжения, которое подается от коммутатора на средство приведения в действие рычага. Управление заключается в задании периода времени, через который будет выполнено переключение, и изменения величины значения напряжения. Как показано на Фиг. 2, в одном варианте выполнения заявленного движителя, средством для приведения в действие рычага является пара движущих электромагнитов. Первый конец рычага содержит постоянные магниты, обращенные к каждому из пары движущих электромагнитов разной полярностью. Переключение сопровождается изменением полярности, которое характеризуется частотой переключения и силой электромагнитного поля, которое действует на постоянные магниты, расположенные на первом конце рычага. Рычаг выполнен с возможностью вращения при придании первому концу рычага усилия от привода. Таким образом обеспечивается колебания рычага с разной частотой.
В этом варианте реализации также предусмотрено изменение частоты колебаний рычага за счет изменения частоты переключения полярности пары движущих магнитов и величины прилагаемого напряжения.
Рычаг выполнен с возможностью придания во время работы средству приведения в действие рычага возвратно-поступательное движение рабочему органу. Рычаг прикреплен к корпусу между первым концом и вторым концом рычага с возможностью вращения на корпусе. Такое крепление может быть выполнено за счет наличия шарнирного соединения или наличии на рычаге подшипника, центр которого является центром поворота рычага, и т.п. При этом чем ближе место крепления рычага с корпусом к первому концу рычага, тем больше амплитуда второго конца рычага.
Второй конец рычага соединен с рабочим органом. При этом, второй конец рычага имеет полость, в которую вставлен ролик, к которому присоединена передняя часть поршня. Ролик выполнен с возможностью перемещения вдоль оси рычага, выполняя колебательное движение относительно корпуса и возвратно-поступательное движение относительно оси рычага.
Рабочий орган выполнен с возможностью совершать возвратно-поступательное движение. В качестве рабочего органа применяют поршень, изготовленный из легких и прочных материалов, который имеет переднюю часть, среднюю часть и заднюю часть. Передняя часть соединена со вторым концом рычага, как было описано выше. Средняя часть поршня по меньшей мере частично размещена в держателе, который закреплен на корпусе. Держатель выполняет функцию направляющей и предназначен обеспечивать возвратно-поступательное движение поршня и предотвращать отклонение поршня во время этого движения. То есть держатель выполнен с возможностью обеспечения возвратно-поступательного движения поршня на оси, совпадающей с осью держателя. Кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают. Это увеличивает эффективность возвратно-поступательного движения поршня.
Задняя часть поршня имеет лопасти, выполненные с возможностью раскладываться во время движении поршня в направлении, противоположном ожидаемому направлению движения тела, образуя в рабочем положении поверхность, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов (движение без маневрирования) и обеспечивает максимальную величину силы сопротивления среды движению поршня, с возможностью складываться во время движения поршня в начальное положение, и обеспечивает минимальную величину силы сопротивления среды движению поршня. Образованная поверхность обеспечивает отталкивание от среды во время рабочей фазы поршня, что инициирует движение тела от точки отталкивания.
Согласно заявленного решения, лопасти прикреплены к поршню и к первому концу штанг, второй конец которых прикреплен через вспомогательный рычаг управления к муфте, расположенной на поршне с возможностью совершать возвратно-поступательное движение вдоль оси поршня. В месте креплений предпочтительно применять шарнирные соединения, которые характеризуются самой высокой надежностью и низким коэффициентом трения. Второй конец штанг и вспомогательный рычаг управления соединены с другими концами штанг управления лопастями, расположенными вдоль поршня. Каждый из первых концов штанг управления лопастями соединен с соответствующим усилителем движения. Усилитель движения может быть выполнен электромеханическим или электромагнитным и предназначен обеспечить движение каждой отдельно взятой штанги управления лопастями относительно поршня для приведения в движение лопасти. Таким образом и обеспечивается возможность маневрирования, когда две лопасти отклонены с разными углами. Каждый усилитель движения закреплен во вращательном держателе, которые неподвижно закреплены на корпусе. Усилители движения объединены с блоком асинхронного управления, к которому присоединен датчик движения.
Второй конец штанг прикреплен к муфте, расположенной на поршне с возможностью совершать возвратно-поступательное движение вдоль оси поршня. Муфта выполнена с возможностью совершать возвратно-поступательное движение на поршне в направлении, противоположном направлению движения поршня. Это позволяет обеспечивать синхронное развертывание лопастей во время движения поршня в направлении, противоположном движению тела, и синхронно сворачивать лопасти при движении поршня по направлению движения тела. Лопасти в развернутом состоянии увеличивают площадь отталкивания от среды. В свернутом состоянии лопасти создают меньшее сопротивление среде во время движения поршня в направлении начального положения.
На поршне размещены два ограничителя для ограничения движения муфты вдоль поршня. Ограничители предназначены обеспечить фиксацию минимального и максимального угла раскрытия и свертывания лопастей. Причем ограничители выполнены с возможностью перемещения вдоль оси поршня для уменьшения амплитуды раскрытия лопастей задней части поршня. Это позволяет регулировать рабочую площадь поверхности, образованную лопастями. Чем больше площадь поверхности, образованная лопастями, тем от большего количества (площади) среды будет отталкиваться поршень. При условии, что частота возвратно-поступательного движения поршня является неизменной, при большей площади поверхности лопастей тело будет получать большее значение момента, направленное на перемещение тела. То есть, чем больше площадь поверхности, образованная лопастями, тем большую скорость развивает тело. Справедливо и обратное высказывание: при уменьшении площади поверхности, образованной лопастями, ускорение тела будет пропорционально уменьшаться.
Согласно варианту воплощения движителя, штанги, которые передают движение муфте вдоль поршня, выполнены телескопическими, то есть могут менять свою длину. Причем штанги содержат дистанционно управляемый пусковой механизм, который выполнен с возможностью управлять степенями удлинения и складывания штанги. Управление пусковым механизмом является дистанционным. Изменение длины штанги влияет на угол раскрытия лопасти. При угле, отличительном от 90° относительно оси поршня, лопасть дополнительно выполняет функцию направляющих, что позволяет более точно выполнять маневрирование.
Еще одним вариантом воплощения движителя является выполнение держателя с возможностью перемещения в направлении, перпендикулярном оси поршня. Такое перемещение может обеспечиваться наличием шатуна, синхронизированного с приводом. Для такого выполнения корпус должен содержать углубление, в которое беспрепятственно должен входить держатель и поршень. Во время движения поршня, держатель и поршень обеспечивают синхронизированное с двигателем движение, направленное на перемещение поршня в предусмотренный для этого желоб на поверхности корпуса тела. Размер длины желоба соответствует длине хода движения поршня. Желоб имеет переменную ширину: в части, предусмотренной для движения лопастей, ширина будет больше, чем в части, соответствующей движению держателя. Такой вариант воплощения позволяет уменьшить сопротивление встречного потока среды и уменьшает усилие, направленное на перемещение поршня в направлении вдоль движения тела.
Согласно еще одному варианту воплощения в качестве рабочего органа применяют поршень, который имеет переднюю часть, среднюю часть и заднюю часть. Передняя часть соединена со вторым концом рычага. Средняя часть размещена в держателе. Задняя часть поршня имеет лопасти, выполненные с возможностью раскладываться во время движении поршня в направлении, противоположном к ожидаемому направлению движения тела, с образованием в конечном положении не менее одной лопастью поверхности, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов и с возможностью складываться во время движения поршня в начальное положение. На краях лопастей выполнены выступы, расположенные под углом к плоскости лопастей, и загнутые в направлении от штанг. Такие выступы позволяют увеличить коэффициент сопротивления в рабочей фазе (определение нейтральной и рабочей фаз приведены далее по тексту). Лопасти прикреплены к поршню и к первому концу штанг, второй конец которых прикреплен через вспомогательный рычаг управления к муфте, расположенной на поршне с возможностью совершать возвратно-поступательное движение вдоль оси поршня. В месте креплений предпочтительно применять шарнирные соединения, которые характеризуются самой высокой надежностью и низким коэффициентом трения. Второй конец штанг и вспомогательный рычаг управления соединены с другими концами штанг управления лопастями, расположенными вдоль поршня. Каждый из первых концов штанг управления лопастями соединен с соответствующим усилителем движения. Усилитель движения может быть выполнен электромеханическим или электромагнитным и предназначен обеспечить движение каждой отдельно взятой штанги управления лопастями относительно поршня для приведения в движение лопасти. Таким образом и обеспечивается возможность маневрирования, когда двое лопастей отклонены с разными углами. Каждый усилитель движения закреплен во вращательном держателе, которые неподвижно закреплены на корпусе. Усилители движения соединены с блоком асинхронного управления, к которому присоединен датчик движения. Датчик движения выполнен с возможностью измерять скорость движения, определять направление и позицию смещения поршня и передавать эти данные в блок асинхронного управления.
Кроме того, предусмотрено использование более чем одного движителя на корпусе тела. При этом может смещаться начало рабочего цикла каждого двигателя для обеспечения более плавного движения при поочередном запуска движителей. Увеличение количества движителей обеспечит, кроме более равномерного движения, меньшее значение отклонения от желаемого курса движения тела и более равномерное распределение веса тела относительно поршней.
Способ движения тела выполняется следующим образом.
В основу работы движителя положен принцип отталкивания тела от среды с помощью поршня, который будет перемещаться в направлении противоположном ожидаемому направлении движения тела - для придания телу движения (рабочая фаза), и возвращаться обратно в начальное положение (нейтральная фаза) для повторения цикла.
Система тело-движитель (движители) имеет центр масс. Во время движения поршня (поршней) в рабочей фазе вдоль корпуса тела центр тяжести смещается в направлении, противоположном направлению движения поршня (поршней). При применении парного количества движителей, и ориентации системы вертикально, вдоль вектора силы тяжести, движители, которые работают в противофазе, приводят к смещению центра тяжести против направления вектора силы тяжести. Замедление скорости движения поршней вызывает замедление скорости смещения центра масс. Это позволяет обеспечить зависание тела в среде в заданной точке.
Движение в воздушной среде требует обеспечения образования подъемной силы. При этом движение в водной среде является менее требовательным к такому свойству движителя из-за разницы в плотности воздушной и водной сред.
Подъемная сила, во время вертикального движения тела, характеризуется разницей между силой сопротивления среды поршня (поршням) в рабочей фазе и суммой сил тяжести, действующих на систему тело-движитель (движители), и сил сопротивления среды движению тела. Как видно, при положительных значениях подъемной силы, будет обеспечен вертикальное движение тела в среде.
Еще одним условием выполнения способа является соотношение массы тела к сумме масс поршней, которые движутся периодически вдоль корпуса тела. Масса тела, для эффективного действия двигателя, должна быть гораздо больше суммы масс поршней. Это позволяет уменьшить колебания смещение центра масс системы тело-движитель, и обеспечить более эффективную работу двигателя.
Соответственно к этим условиям, поршни, например, должны двигаться вдоль корпуса тела по направлению к основанию (поверхности земли). Ось поршня каждого из двигателей совпадает с вертикальной осью направления вектора силы тяжести земли. Когда один двигатель находится в рабочей фазе, второй находится в нейтральной.
Существенным для способа является то, что обеспечивается возвратно-поступательное движение поршня снаружи корпуса тела. Возвратно-поступательное движение поршня характеризуется рабочей фазой, которая определяется направлением движения поршня, противоположным ожидаемому направлению движения тела, и нейтральной фазой, которая определяется направлением движения поршня в начальное положение.
Поршень имеет переднюю часть и заднюю часть, где задняя часть поршня имеет лопасти, которые раскладывают во время движения поршня в рабочей фазе, с образованием в конечном положении как минимум одной лопастью поверхность, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов и складывают во время движении поршня в нейтральной фазе. В рабочей фазе поршень имеет начальное положение, при котором его скорость относительно корпуса тела равна нулю. Преимущественно поршень входит в состав движителя, такого как описано выше.
Рычаг придает возвратно-поступательное движение поршню и поршень движется в направлении, противоположном ожидаемому направлению движения тела. При этом обеспечивают в рабочей фазе отталкивание поршня от среды разложенными лопастями и перемещение корпуса тела от поршня за счет движения рычага, соединенного с передней частью поршня. Во время движения поршня в рабочей фазе среда оказывает сопротивление поверхности, образованной лопастями, что уменьшает скорость движения поршня. Компенсация уменьшения движения поршня осуществляется за счет увеличения движения тела, которое отталкивается от поршня с помощью движения рычага. После достижения поршнем предельной точки в рабочей фазе, при которой скорость поршня относительно корпуса тела равна нулю, рычаг возвращает поршень в положение, в котором поршень находился в начале рабочей фазы, когда его скорость равнялась нулю относительно корпуса.
Во время нейтральной фазы лопасти сворачиваются для уменьшения сопротивления среды, которая движется навстречу телу. Предпочтительно применять в нейтральной фазе перемещение поршня в желобе корпуса тела для еще большего уменьшения сопротивления среды.
Регулирование раскрытием лопастей обеспечивает маневрирование тела во время его движения. Согласно одному варианту воплощения, ограничители выполнены с возможностью перемещения вдоль оси поршня. Изменение положения ограничителей может быть сделано заранее, то есть до приведения движителя в действие, или быть оперативным, то есть во время работы движителя. Предварительная настройка положения ограничителей обеспечивается их фиксацией на поршни, например путем применения клиновидного уплотнителя, который удлиняется с уплотнителя в пространство между уплотнителем и поршнем. При оперативном изменении положения уплотнителя, указанные клинья выполняют радиоуправляемыми. Изменение положения уплотнителя выполняется с учетом направления движения поршня: клиновидные уплотнители сдвигаются внутрь уплотнителя и это позволяет уплотнителю двигаться по инерции, что обеспечивает изменение его положения. При достижении требуемого положения клиновидный уплотнитель устанавливается между уплотнителем и поршнем. Управление изменением положения возможно с помощью радиосигнала или сигнала, который передается каналом близкой связи. Движение уплотнителя может инициироваться магнитными переключателями или им подобными. Изменение положения уплотнителя непосредственно влияет на амплитуду движения штанги.
При этом штанги выполнены телескопическими, что позволяет изменять их длину. Для этого штанги содержат дистанционно управляемый пусковой механизм, который выполнен с возможностью управлять степенью удлинения и сборками штанги. В сочетании с изменением положения уплотнителя, изменение длины штанги позволяет более точно регулировать степень раскрытия лопастей, что влияет на маневренность.
Согласно другому варианту воплощения лопасти прикреплены к поршню и к первому концу штанг. Второй конец штанг прикреплен через вспомогательный рычаг управления к муфте, расположенной на поршне с возможностью совершать возвратно-поступательное движение вдоль оси поршня. Вспомогательный рычаг предназначен передавать на штангу изменение положения штанги управления лопастями.
На Фиг. 3 изображено положение плоскости лопастей перпендикулярно относительно оси поршня. При этом поршень и штанги управления лопастями движутся синхронно. При таком положении лопастей обеспечивается наибольшее сопротивление среде, что обеспечивает максимальную отталкивающую силу, во время движения поршня в направлении, противоположном ожидаемому направлению движения тела.
На Фиг. 4 изображен момент передачи смещения штанг управления лопастями относительно оси поршня. Это приводит к отклонения плоскости лопастей от ортогонального положения относительно оси поршня при завершении рабочей фазы, что обеспечивает изменение (отклонение) направления движения тела.
На Фиг. 5 изображено положение лопастей во время нейтральной фазы, когда поршень движется в направлении начального положения. При этом лопасти складываются, уменьшая при этом сопротивление встречному потоку среды.
На Фиг. 6 изображено присоединение каждого из первых концов штанг управления лопастями к соответствующим усилителем движения. Блок асинхронного управления получает данные датчика движения о текущем направлении движения поршня для определения момента запуска усилителя движения для каждой отдельной штанги управления лопастями. На концах штанг управления также размещены отбойники-амортизаторы для предупреждения повреждения лопастей поршня.
Среда, в которой должен перемещаться поршень, в рабочей фазе должна минимально влиять на тело, но проявлять большое сопротивление движению поршня в рабочей фазе, то есть в противоположном направлении относительно движения поршня, но в направлении ожидаемого движения тела и в нейтральной фазе среда должна проявлять минимальное сопротивление движению поршня. То есть сопротивление среды поршню в рабочей фазе должен быть большим, чем сопротивление среды телу во время движения поршня в рабочей фазе.
Движитель работает следующим образом. Привод запускает в действие средство приведения в действие рычага. При этом передается или крутящий момент для запуска маховика, или напряжение на движущие электромагниты, в зависимости от варианта выполнения средства для приведения в действие рычага. Рычаг начинает вращаться и выполнять колебательное движение относительно точки соединения с корпусом. Нижняя часть рычага вызывает возвратно-поступательное движение поршня в направлении, противоположном ожидаемому направлению движения тела. При этом лопасти под действием сопротивления среды раскрываются и образуют плоскость, которая составляет с осью поршня угол больший за ноль градусов и меньший или равный 90 градусов, что увеличивает площадь сопротивления среде. Поршень отталкивается от среды, и тело начинает двигаться. Далее цикл повторяют.
Ниже приведены расчеты мощности одного двигателя и скорости движения поршня, чтобы обеспечить поддержание центра масс системы тело - поршень неподвижным относительно поверхности земли в рабочей фазе поршня, когда ось поршня ориентирована вертикально относительно земли и общая масса системы менее 130 кг.
В качестве лопастей поршня использована пара прямоугольных пластин, изготовленных из прочных легких материалов, например магниевых сплавов, которые образуют прочную и легкую сплошную поверхность общей площадью 4 квадратных метра. Безразмерный аэродинамической коэффициент сопротивления принят за 2,0. Ускорение свободного падения - 9,81 м / c2. Плотность воздуха за 1,3 кг / м3. Отсюда получим необходимую скорость движения поршня, и необходимую мощность движителя:
Скорость движения поршня относительно воздуха 16 м/с. Мощность одного движителя: 21 кВт.
Специалисту в данной области на основе данного описания должны быть очевидными принцип работы заявленного движителя и замена составляющих движителя на аналогичные по сути.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОУСТАНОВКА | 2003 |
|
RU2254495C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| ВРАЩАТЕЛЬНО-ТОЛКАТЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2470168C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2077681C1 |
| ШАГАЮЩАЯ МАШИНА | 1995 |
|
RU2099230C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ РЕЖИМОВ ДЛЯ КОМБИНИРОВАННОГО ЖИДКОСТРУЙНОГО ИНСТРУМЕНТА ДЛЯ КОКСОУДАЛЕНИЯ И СОДЕРЖАЩИЙ ЭТО УСТРОЙСТВО ИНСТРУМЕНТ | 2010 |
|
RU2542263C2 |
| МАЯТНИКОВЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2691888C1 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| ВЕТРОУСТАНОВКА С ВЕРТИКАЛЬНОЙ ОСЬЮ | 2013 |
|
RU2652262C2 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |



Изобретение относится к агрегатам приведения в движение тела и может быть применено в воздушных и водных транспортных средствах. Движитель тела имеет корпус и содержит привод, жестко закрепленный с корпусом, и рабочий орган, выполненный с возможностью совершать возвратно-поступательное движение. Привод связан со средством приведения в действие рычага, с которым соединен первый конец рычага, второй конец рычага соединен с рабочим органом, а в качестве рабочего органа используется поршень, который имеет переднюю часть, среднюю часть и заднюю часть, где передняя часть объединена со вторым концом рычага, средняя часть размещена в держателе, а задняя часть поршня имеет лопасти, выполненные с возможностью раскрываться во время движения поршня в направлении, противоположном к ожидаемому направлению движения тела, с образованием каждой лопастью угла от нуля до 90 градусов, между осью поршня и плоскостью лопасти. Для совершения маневрирования заданный угол является разным для каждой из лопастей - большим за ноль и меньшим за 90 градусов по крайней мере для одной из них, для совершения движения без маневрирования упомянутый угол для каждой лопасти является равным 90 градусов, и для понижения скорости упомянутый угол является меньше чем 90 градусов, и с возможностью складываться во время движения поршня в начальное положение. Лопасти прикреплены к поршню и к первому концу штанг, второй конец которых прикреплен к муфте, размещенной на поршне с возможностью совершения возвратно-поступательного движения вдоль оси поршня, причём на поршне размещены два ограничителя для ограничения движения муфты вдоль поршня, причём средняя часть поршня по меньшей мере частично размещена в держателе, который размещен на теле, где держатель выполнен с возможность обеспечения возвратно-поступательного движения поршня вдоль оси, которая совпадает с осью держателя. Достигается увеличение надежности и безопасности движителя и упрощение его конструкции. 3 н. и 10 з.п. ф-лы, 6 ил.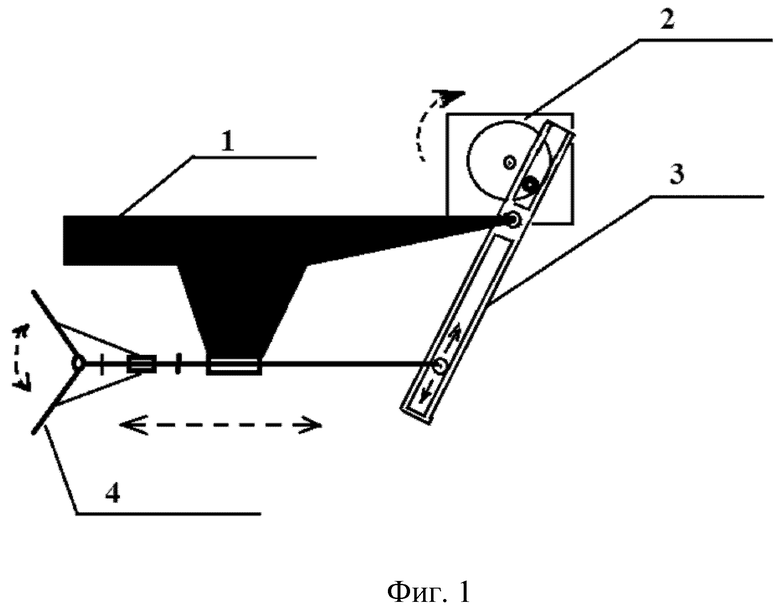
1. Движитель тела, который имеет корпус, для движения тела в среде, причём средой является воздух или вода, где движитель содержит привод, жестко закрепленный с корпусом, и рабочий орган, выполненный с возможностью совершать возвратно-поступательное движение, отличающийся тем, что
привод связан со средством приведения в действие рычага, с которым соединен первый конец рычага,
второй конец рычага соединен с рабочим органом, при этом рычаг выполнен с возможностью придавать во время работы средства приведения в действие рычага возвратно-поступательное движение рабочему органу,
в качестве рабочего органа используется поршень, который имеет переднюю часть, среднюю часть и заднюю часть, где передняя часть объединена со вторым концом рычага, средняя часть размещена в держателе, а задняя часть поршня имеет лопасти, выполненные с возможностью раскрываться во время движения поршня в направлении, противоположном к ожидаемому направлению движения тела, с образованием каждой лопастью угла от нуля до 90 градусов, между осью поршня и плоскостью лопасти,
причём для совершения маневрирования заданный угол является разным для каждой из лопастей - большим за ноль и меньшим за 90 градусов по крайней мере для одной из них, для совершения движения без маневрирования упомянутый угол для каждой лопасти является равным 90 градусов, и для понижения скорости упомянутый угол является меньше чем 90 градусов,
и с возможностью складываться во время движения поршня в начальное положение,
причём лопасти прикреплены к поршню и к первому концу штанг, второй конец которых прикреплен к муфте, размещенной на поршне с возможностью совершения возвратно-поступательного движения вдоль оси поршня, причём на поршне размещены два ограничителя для ограничения движения муфты вдоль поршня, причём средняя часть поршня по меньшей мере частично размещена в держателе, который размещен на теле, где держатель выполнен с возможность обеспечения возвратно-поступательного движения поршня вдоль оси, которая совпадает с осью держателя.
2. Движитель по п.1, отличающийся тем, что второй конец рычага имеет полость, в которую вставлен ролик, к которому присоединена передняя часть поршня, причём ролик выполнен с возможность перемещения вдоль оси рычага, причём рычаг закреплен с возможностью вращения на корпусе, кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
3. Движитель по п.1 или 2, отличающийся тем, что привод является генератором электромагнитного поля, средство привидения в действие рычага является парой движительных электромагнитов, а первый конец рычага содержит постоянные магниты, обращенные к каждой из пары движительных электромагнитов разной полярности, причём рычаг закреплен с возможностью вращения на корпусе, кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
4. Движитель по п.1 или 2, отличающийся тем, что привод является вращательным двигателем, средство приведения в действие рычага является маховиком с выступающим роликом, а первый конец рычага имеет полость, в которую вставлен выступающий ролик, который выполнен с возможностью перемещаться радиально относительно оси маховика и возвратно-поступательно относительно оси рычага, причём рычаг закреплен с возможностью вращения на корпусе, кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
5. Движитель по любому из пп.1-4, отличающийся тем, что ограничители выполнены с возможностью перемещения вдоль оси поршня для уменьшения амплитуды раскрытия лопастей задней части поршня.
6. Движитель по любому из пп.1-5, отличающийся тем, что штанги выполнены телескопическими, причём штанги содержат дистанционно управляемый пусковой механизм, который выполнен с возможностью управления степенью выдвижения и складывания штанги.
7. Движитель тела, который имеет корпус, для движения тела в среде, причём средой является воздух или вода, где движитель содержит привод, жестко закрепленный с корпусом, и рабочий орган, выполненный с возможностью совершать возвратно-поступательное движение, отличающийся тем, что
привод связан со средством приведения в действие рычага, с которым соединен первый конец рычага,
второй конец рычага соединен с рабочим органом, при этом рычаг выполнен с возможностью придавать во время работы средства приведения в действие рычага возвратно-поступательное движение рабочему органу,
в качестве рабочего органа использован поршень, который имеет переднюю часть, среднюю часть и заднюю часть, где передняя часть объединена с вторым концом рычага, средняя часть размещена в держателе, а задняя часть поршня имеет лопасти, выполненные с возможностью раскрываться во время движения поршня в направлении, противоположном к ожидаемому направлению движения тела, с образованием каждой лопастью угла от нуля до 90 градусов, между осью поршня и плоскостью лопасти,
причём для совершения маневрирования заданный угол является разным для каждой из лопастей - большим за ноль и меньшим за 90 градусов по крайней мере для одной из них, для совершения движения без маневрирования заданный угол для каждой лопасти является равным 90 градусов, и для понижения скорости заданный угол является меньше чем 90 градусов,
и с возможностью складываться во время движения поршня в начальное положение,
причём лопасти прикреплены к поршню и к первому концу штанг, второй их конец прикреплен через вспомогательный рычаг управления к муфте, размещенной на поршне с возможностью совершения возвратно-поступательного движения вдоль оси поршня, причём второй конец штанг и вспомогательный рычаг управления соединены с вторыми концами штанг управления лопастями, которые размещены вдоль поршня, а каждый из первых концов штанг управления лопастями соединен с соответствующим усилителем движения, которые выполнены вращательными, каждый из которых закреплен в вращательном держателе, который неподвижно закреплен на корпусе, причём усилители движения соединены с блоком асинхронного управления, с которым объединён датчик движения.
8. Движитель по п.7, отличающийся тем, что второй конец рычага имеет полость, в которую вставлен ролик, к которому присоединена передняя часть поршня, причём ролик выполнен с возможностью перемещения вдоль оси рычага, причём рычаг закреплен с возможностью вращения на корпусе, кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
9. Движитель по п.7 или 8, отличающийся тем, что привод является вращательным двигателем, средство приведения в действие рычага является маховиком с выступающим роликом, а первый конец рычага имеет полость, в которую вставлен выступающий ролик, который выполнен с возможностью перемещаться радиально относительно оси маховика и возвратно-поступательно относительно оси рычага, причём рычаг закреплен с возможностью вращения на корпусе, кроме того, плоскость вращения рычага и плоскость возвратно-поступательного движения поршня совпадают.
10. Движитель по любому из пп.7-9, отличающийся тем, что на поршне размещены два ограничителя для ограничения движения муфты вдоль поршня, причём ограничители выполнены с возможностью перемещения вдоль оси поршня для уменьшения амплитуды раскрытия лопастей задней части поршня.
11. Движитель по любому из пп.1-10, отличающийся тем, что на краях лопастей выполнены выступы, которые размещены под углом к плоскости лопастей, и загнуты в направлении от штанг.
12. Движитель по любому из пп.2-6, отличающийся тем, что держатель выполнен с возможностью перемещения в направлении, перпендикулярном оси поршня, кроме того, корпус имеет заглубление, в которое беспрепятственно входит держатель и поршень.
13. Способ движения тела в среде, причём средой является воздух или вода, отличающийся тем, что
совершают возвратно-поступательное движение поршня снаружи корпуса тела, где возвратно-поступательное движение поршня характеризуется рабочей фазой, которая определяется направлением движения поршня, противоположным к ожидаемому направлению движения тела, и нейтральной фазою, которая определяется направлением движения поршня в начальное положение,
причём поршень имеет переднюю часть и заднюю часть, где задняя часть поршня имеет лопасти, которые раскрываются во время движения поршня в рабочей фазе с образованием каждой лопастью угла от нуля до 90 градусов, между осью поршня и плоскостью лопасти,
причём для совершения маневрирования упомянутый угол является разным для каждой из лопастей и большим за ноль и меньший за 90 градусов хотя бы для одной из них, для совершения движения без маневрирования упомянутый угол для каждой из лопастей является равным 90 градусов, и для понижения скорости заданный угол является меньшим за 90 градусов,
и складывают во время движения поршня в нейтральной фазе,
выполняют в рабочей фазе отталкивание поршня от среды раскрытыми лопастями и перемещение корпуса тела от поршня за счет движения рычага, связанного с передней частью поршня.
| Клапанный судовой движитель с поворотными на шарнирах, прикрепленных к штоку двигателя, плицами | 1926 |
|
SU6441A1 |
| Бумагоподающий механизм печатающего устройства | 1987 |
|
SU1430295A1 |
| ТЕПЛОИЗОЛЯЦИОННАЯ МАССА | 1971 |
|
SU412216A1 |
| Судовой двигательно-движительный комплекс | 1985 |
|
SU1384477A1 |
| 0 |
|
SU170947A1 | |
| CN 104842341 B, 31.08.2016. | |||

