Область техники, к которой относится изобретение
Изобретение относится к способу управления многофазной электрической машиной, в частности, асинхронной машиной, с ротором, статором и по меньшей мере двумя фазными обмотками, где по меньшей мере один электрический сигнал, в частности, сигнал напряжения, подается по меньшей мере на одну фазную обмотку, предпочтительно на все фазные обмотки многофазной электрической машины, и форма электрического сигнала, в частности, форма тока, измеряется или определяется по меньшей мере в одной фазной обмотке.
Изобретение также относится к системе многофазной электрической машины для выполнения такого способа.
Уровень техники
В современных способах управления многофазными асинхронными машинами часто необходимо знать угловое положение ротора. Для получения этой информации можно использовать датчики, такие как инкрементальные поворотные энкодеры (датчики угла поворота), абсолютные поворотные энкодеры или бесконтактные синусно-косинусные вращающиеся трансформаторы (резольверы), которые могут быть основаны на самых разных физических принципах. Однако недостатком всех типов поворотных энкодеров являются дополнительные расходы. Кроме того, поворотные энкодеры имеют ограниченный срок службы, который часто меньше запланированного срока службы многофазной электрической машины. Подозрение на отказ трехфазного привода часто происходит из-за выхода из строя такого датчика. Однако отказы и простои, например, отказы поездов на железнодорожных линиях, могут потребовать значительных усилий и больших затрат, и поэтому их следует по возможности избегать.
Во избежание использования таких датчиков в многофазных электрических машинах или трехфазных приводах, были разработаны так называемые способы бессенсорного управления, в которых угловое положение потокосцепления может быть определено по формам сигналов электрических переменных в многофазной электрической машине без использования датчика угла или скорости вращения ротора. В этих процедурах сигналы возбуждения часто подаются посредством преобразователя, и сигналы отклика машины измеряются как следствие сигналов возбуждения. Посредством соответствующей оценки можно определить угловое положение или скорость вращения ротора.
В способах бессенсорного управления используется тот факт, что многофазные электрический машины демонстрируют асимметрию, вызванную их конструкцией или во время работы в результате электрических или магнитных эффектов, которые могут изменяться в зависимости от времени и положения. Изменения асимметрии обычно вызывают изменения индуктивности и поэтому могут быть обнаружены, например, по изменению нарастания тока. В документе WO 99/39430 A1 описан способ бессенсорного управления.
Примером асимметрии, связанной с конструкцией, является ротор синхронной машины с возбуждением от постоянных магнитов (PSM), которая имеет постоянные магниты в определенных положениях, которые имеют более низкую относительную проницаемость, чем окружающие области, содержащие железо и, следовательно, повышенное магнитное сопротивление в области постоянных магнитов по сравнению с областями с железом. Когда ротор PSM вращается, магнитное сопротивление по окружности воздушного зазора изменяется в зависимости от времени и положения, что проявляется в изменении индуктивности.
Примерами электрической или магнитной асимметрии являются явления локального насыщения путей магнитного потока в многофазной электрической машине.
Чем слабее асимметрии, связанные с ротором многофазной электрической машины, тем труднее обнаружить изменение угла поворота ротора без датчиков. Особенно сложно определить угловое положение ротора многофазной электрической машины без датчиков (то есть без датчиков описанного выше типа, таких как поворотные инкрементальные энкодеры), так как индукционные машины, особенно по сравнению с синхронными машинами, имеют более низкую асимметрию. В асинхронных машинах пазовая составляющая сигнала, содержащаяся в измеренных формах тока, обычно изолирована от других составляющих сигнала и оценивается, или используется сигнал насыщения. Пазовая составляющая сигнала вызвана вращением паза ротора за пазом статора и соответствующим изменением индуктивности. Так как изменения индуктивности, вызванные прохождением паза, относительно малы, пазовая составляющая сигнала обычно мала и поэтому, в зависимости от рабочего состояния и конструкции индукционной машины, ее трудно определить и отделить от других составляющих сигнала. В частности, при увеличении нагрузки на асинхронную машину трудно или невозможно отличить пазовую составляющую сигнала от других составляющих сигнала.
Сущность изобретения
В свете этих комментариев задача настоящего изобретения состоит в том, чтобы облегчить или даже полностью устранить недостатки предшествующего уровня техники. В частности, задача настоящего изобретения состоит в том, чтобы предоставить способ вышеупомянутого типа, в котором угловое положение и/или скорость вращения ротора многофазной электрической машины, в частности, асинхронной машины, могут быть определены по меньшей мере из одной формы электрического сигнала улучшенным способом и в широком диапазоне скоростей вращения и нагрузок.
Эта задача решена с помощью способа, имеющего признаки по п.1 формулы изобретения. Таким образом, согласно изобретению в способе упомянутого выше типа предусмотрено, что интермодуляционная составляющая сигнала, индуцированная в многофазной электрической машине за счет пазовых эффектов и магнитного насыщения, которая определяется по форме электрического сигнала, измеренного или определенного по меньшей мере в одной фазной обмотке, используется для управления многофазной электрической машиной. Интермодуляционная составляющая сигнала может использоваться, в частности, для определения положения ротора, то есть углового положения ротора, которое впоследствии может использоваться для управления многофазной электрической машиной. Предпочтительно по меньшей мере одна форма электрического тока измеряется или определяется и используется в качестве формы электрического сигнала. По этой причине следующие комментарии относятся к измеренным формам тока. Однако можно также использовать измеренные или определенные формы сигналов напряжения. Определение формы сигнала, в частности, формы тока по меньшей мере в одной фазной обмотке многофазной электрической машины может быть выполнено, например, путем измерения токов и/или напряжений в звене постоянного тока (промежуточной цепи) преобразователя, в источнике питания преобразователя или в источнике питания преобразователя со стороны машины. В частности, фазные токи многофазной электрической машины могут быть определены на основе тока промежуточной цепи. Так как способ особенно подходит для использования в асинхронных машинах или электрических машинах по меньшей мере частично с признаками машин, подобных асинхронным (например, в синхронных машинах с демпферной клеткой), следующие замечания в первую очередь относятся к асинхронным машинам. В предпочтительном варианте осуществления электрическая многофазная асинхронная машина может иметь две, три или более трех фазных обмоток. Предпочтительно электрическая многофазная асинхронная машина является трехфазной. Изобретение основано на обнаружении того факта, что, как будет дополнительно пояснено ниже, существует математическая или физическая взаимосвязь между составляющей интермодуляционного сигнала и составляющей сигнала паза, характеризующая угловое положение или скорость вращения ротора и, следовательно, сигнал управления и сигнал положения можно получить из составляющей интермодуляционного сигнала и использовать для управления многофазной электрической машиной. Таким образом, пазовую составляющую сигнала, которую часто трудно определить, больше не нужно использовать напрямую. Интермодуляционная составляющая сигнала в отклике сигнала многофазной электрической машины тока в ответ на сигнал возбуждения значительно больше, чем пазовая составляющая сигнала в большинстве рабочих состояний многофазной электрической машины, и поэтому ее можно легче определить и отделить от других составляющих сигнала. Составляющую интермодуляционного сигнала можно оценивать во временной области и/или в частотной области. В частности, угловое положение и/или скорость вращения ротора впоследствии можно определить из интермодуляционной составляющей сигнала. Для этой цели может также использоваться составляющая насыщения сигнала, которая коррелирует с интермодуляционной составляющей сигнала (см. ниже). Интермодуляционная составляющая сигнала вызвана, главным образом, эффектами паза ротора или статора многофазной электрической машины и эффектами магнитного насыщения путей магнитного потока внутри многофазной электрической машины. В большинстве рабочих состояний интермодуляционная составляющая сигнала имеет основную частоту, отличную от пазовой составляющей сигнала и составляющей насыщения сигнала. В свою очередь, описанные эффекты вызывают отдельные составляющие сигнала, которые также содержатся по меньшей мере в одной измеряемой форме тока. В форме кривой тока, составляющие сигнала, возникающие из-за наличия пазов в роторе и статоре многофазной электрической машины, называются пазовыми составляющими сигнала. Как правило, основная частота пазовых оставляющих сигнала по существу в N раз превышает частоту вращения ротора, где N соответствует количеству пазов ротора. Составляющие сигнала, индуцированные в форме кривой тока, вызванные временным и локальным изменением магнитного насыщения путей магнитного потока внутри многофазной электрической машины, называются составляющими насыщения сигнала. Основная частота составляющей насыщения сигнала обычно соответствует удвоенному основному периоду или рабочему периоду машины. Физически объединяя два упомянутых выше эффекта, также объединяются их составляющие сигнала в многофазной электрической машине, тем самым образуя интермодуляционную составляющую сигнала, частота которой отличается от частоты составляющей насыщения сигнала и частоты пазовой составляющей сигнала в большинстве рабочих состояний (интермодуляция). Взаимосвязь между частотами интермодуляционной составляющей сигнала, пазовой составляющей сигнала и составляющей насыщения сигнала имеет вид:
 (1)
(1)
где ωinter – частота интермодуляционной составляющей сигнала, ωsat – частота составляющей насыщения сигнала, и ωslot – частота пазовой составляющей сигнала. Знак ωsat в уравнении (1) зависит от конструкции и дизайна многофазной электрической машины. Для восстановления пазовой составляющей сигнала из интермодуляционной составляющей сигнала путем вычисления может использоваться, в частности, составляющая насыщения сигнала, предпочтительно ее основная частота. Составляющую насыщения сигнала можно определить по токам в фазных обмотках многофазной электрической машины. В дополнение к основным частотам упомянутые составляющие сигнала также могут иметь гармоники, но они будут проигнорированы в интересах упрощенного объяснения и из-за их незначительного влияния. Изобретение, кроме того, основано на обнаружении того факта, что корреляция между интермодуляционной составляющей сигнала и пазовой составляющей сигнала может использоваться для определения углового положения и/или скорости вращения ротора из интермодуляционной составляющей сигнала без необходимости определения или использования пазовой составляющей сигнала непосредственно из формы кривой тока. Таким образом, интермодуляционная составляющая сигнала может успешно использоваться во всех способах управления, в которых необходимо знать угловое положение ротора или угловое положение потокосцепления. В отличие от изобретения, в предшествующем уровне техники интермодуляционный сигнал обычно устраняется как помеховый сигнал, и для управления используется непосредственно пазовая составляющая сигнала или составляющая насыщения сигнала.
Особенно предпочтительно, если электрические сигналы, в частности, сигналы напряжения, подаются на все фазные обмотки многофазной электрической машины, и результирующая форма кривой тока каждой фазной обмотки определяется, в частности, измеряется, оценивается и используется для определения интермодуляционной составляющей сигнала. Поданные электрические сигналы могут, в частности, содержать сигналы возбуждения. Отклик машины на сигналы возбуждения позволяет получить информацию о рабочем состоянии машины, чтобы можно было определить интермодуляционную составляющую сигнала. Могут быть предусмотрены разные типы и формы сигналов возбуждения. Сигналами возбуждения могут быть, например, сигналы напряжения, которые прикладываются (в любом случае) для создания вращающегося поля в воздушном зазоре. Сигналы возбуждения могут быть результатом операций переключения силовых полупроводников преобразователя, таких как ШИМ (широтно-импульсная модуляция) или аналогичные способы. В процессе переключения преобразователь создает вращающееся поле в воздушном зазоре. Таким образом, сигналы возбуждения могут быть интегрированы во вращающееся поле возбуждения. Например, несущая частота ШИМ или ее гармоники могут также рассматриваться и использоваться в качестве сигнала возбуждения. Таким образом, части последовательности переключения используются для работы многофазной электрической машины, и их формы колебаний тока определяются и оцениваются. Сигналами возбуждения могут быть также сигналы возбуждения или тестовые сигналы, независимо от последовательности переключения, для создания вращающегося поля многофазной электрической машины, которые применяются между последовательностями переключения для создания вращающегося поля в воздушном зазоре и/или накладываются на них. В качестве сигналов возбуждения предпочтительно использовать прямоугольные импульсы, так как их легко формировать с помощью преобразователя. Сигналы возбуждения могут быть также, например, синусоидальными, переходными, импульсными и/или вращающимися. Сигналы возбуждения могут быть непосредственно ШИМ-модулированными. Единственным важным моментом является то, что можно определить реакцию машины на сигнал возбуждения (например, форму кривой тока), что позволяет сделать выводы о ранее упомянутых изменяющихся асимметриях многофазной электрической машины. Предпочтительно, когда подаются сигналы возбуждения, которые не являются частью последовательности переключения для работы многофазной электрической машины, то есть не используются для создания вращающегося магнитного поля, частота сигналов возбуждения выбирается таким образом, чтобы они не имели или имели только минимальное влияние на создаваемое вращающееся поле или крутящий момент в воздушном зазоре.
В предпочтительном варианте осуществления предусмотрено, что угловое положение и/или скорость вращения ротора определяются из интермодуляционной составляющей сигнала, и угловое положение и/или скорость вращения используются для управления многофазной электрической машиной. Например, скорость вращения можно определить по формуле (1). Таким образом, при определении углового положения и/или скорости вращения можно использовать составляющую насыщения сигнала, в частности, его угол или угол, представляющий его. В одном варианте осуществления путем интегрирования угловой скорости ωslot можно восстановить угловое положение ротора путем обратного вычисления. Угловое положение может использоваться, в частности, для представления физических, в частности, электрических, величин, необходимых для регулирования в способе управления.
Предпочтительно, интермодуляционная составляющая сигнала определяется по меньшей мере из одной временной формы кривой тока, в частности, из его скорости изменения. Соответствующая скорость изменения также может быть определена с помощью математического уравнения после возможного объединения нескольких форм кривых тока с разными фазами.
Еще один вариант осуществления предусматривает, что по меньшей мере в двух фазных обмотках, в частности, в трехфазных обмотках многофазной электрической машины, определяются формы сигналов тока, в частности, скорости их изменения, и формы сигналов тока, предпочтительно скорости их изменения объединяются с помощью математического уравнения, в частности, уравнения для вычисления пространственного вектора, чтобы сформировать объединенный сигнал, и интермодуляционная составляющая сигнала определяется из объединенного сигнала. Измеренные формы колебаний тока предпочтительно представляют собой дискретные временные сигналы. Однако измеренные формы сигналов тока могут быть также непрерывными во времени сигналами. Вместо форм сигналов тока можно также использовать формы сигналов напряжения.
При определении внутренних состояний многофазной электрической машины из-за электрического соотношения
 (2)
(2)
удобно, если скорости изменения форм колебаний тока объединяются математическим уравнением или после объединения определяется скорость изменения объединенного сигнала, так как асимметрии, которые позволяют оценить угловое положение или скорость вращения ротора можно определить, в частности, по изменению индуктивности, и индуктивность L связана с напряжением u(t) посредством скорости изменения тока di(t)/dt. Если приложенный электрический сигнал является по существу синусоидальным сигналом напряжения, измеренные значения тока, в частности, значения амплитуды или среднеквадратичные значения, также могут быть использованы и напрямую объединены, так как на основе сложных вычислений переменного тока соотношение согласно уравнению (2) упрощается до
 , (3)
, (3)
где U – снова означает напряжение, j – мнимая единица, ω – угловая скорость/частота, L – индуктивность, и I – ток. В качестве уравнения для связи форм сигналов тока, в частности, скорости их изменения, может использоваться уравнение для вычисления пространственного вектора, например
 (4a)
(4a)
или
 (4b)
(4b)
где iU,V,W(t) – форма тока (или diU,V,W(t)/dt ее первая производная по времени) в фазной обмотке U, V, W многофазной электрической машины, j – мнимая единица, e – число Эйлера, и π – постоянная окружности. В этом случае объединенный сигнал ϑSaliency представляет собой комплексный вектор, эквивалентный пространственному вектору. Пространственный вектор используется для отображения физических величин, в частности, величин многофазной системы, на комплексной плоскости с действительной и мнимой частями. Затем интермодуляционный сигнал может быть определен из объединенного сигнала.
В одном варианте осуществления предусмотрено, что интермодуляционная составляющая сигнала извлекается путем исключения других составляющих сигнала, предпочтительно путем устранения составляющих насыщения сигнала, обусловленных эффектами магнитного насыщения и/или пазовый составляющих сигнала, обусловленных эффектами пазов в многофазной электрической машине, предпочтительно из объединенного сигнала. Другими словами, интермодуляционная составляющая сигнала изолируется. Можно также исключить дополнительные составляющие сигнала. Удаление составляющих сигнала, отличных от интермодуляционной составляющей сигнала, можно выполнить, например, путем фильтрации. Удаление может быть также выполнено путем вычитания нежелательных составляющих сигнала. Например, нежелательные составляющие сигнала по частоте, амплитуде и фазе можно оценить и вычесть из формы тока или соответствующего сигнала тока. Это может быть выполнено, например, путем предварительной идентификации машины и использования функции стоимости, такой как описанная в работе “Identification and Compensation of High-order Harmonic Distortions in Saliency Based Sensorless Control of Induction Machines” by W. Fahrner, M.A. Vogelsberger and T. Wolbank, or in “Induction Machine Design Methodology for Self-Sensing: Balancing Saliencies and Power Conversion Properties.” by Brown, Ian Paterson and Robert D. Lorenz.
В одном варианте осуществления изобретения предусмотрено, что информация о пазе, в частности, угол паза, определяется по углу интермодуляционной составляющей сигнала путем объединения угла интермодуляционной составляющей сигнала с углом составляющей насыщения сигнала, содержащейся в форме сигнала тока, например, с помощью правила расчета
 (5)
(5)
где θslot(t) соответствует вычисленному углу интервала, θinter(t) углу интермодуляционной составляющей сигнала, и θsat(t) углу составляющей насыщения сигнала. Определенный таким образом угол θslot(t) паза по существу соответствует углу пазовой составляющей сигнала. Другими словами, путем объединения угла θinter(t) интермодуляционной составляющей сигнала и угла θsat(t) составляющей насыщения сигнала определяется или вычисляется угол θslot(t) паза. Углы θslot(t), θinter(t) и θsat(t) могут быть фазными углами, в частности, фазными углами основных частот отдельных эффектов. Угол θsat(t) составляющей насыщения сигнала может быть определен путем удвоения угла тока статора, при этом значение смещения, зависящее от нагрузки, может быть предоставлено для коррекции. Значение смещения можно определить, например, с помощью функции стоимости, полученной из измерений на многофазной электрической машине.
Для расчета механического углового положения ротора в одном варианте осуществления изобретения может быть предусмотрено, что механическое угловое положение ротора определяется путем деления пазового угла на количество пазов ротора. Предпочтительно количество пазов соответствует общему количеству пазов ротора.
В ходе экспериментов со способом согласно изобретению было обнаружено, что угол интермодуляционной составляющей сигнала может иметь отклонение в зависимости от скорости вращения и/или нагрузки многофазной электрической машины, так что угловое положение ротора, определенное из интермодуляционной составляющей сигнала, может отклоняться от фактического углового положения. По этой причине может быть полезно, например, скорректировать угол интермодуляционной составляющей сигнала в зависимости от нагрузки, в частности, крутящего момента, и/или скорости вращения многофазной электрической машины, используя значение интермодуляционной коррекции. Значение интермодуляционной коррекции можно определить до применения способа, например, путем измерения на машине или путем вычислений, и сохранить, например, в таблице или смоделировать с помощью математической функции.
Кроме того, эксперименты показали, что угол составляющей насыщения сигнала также может показывать отклонение в зависимости от скорости вращения и/или нагрузки многофазной электрической машины. По этой причине может быть предусмотрено, чтобы угол составляющей насыщения сигнала корректировался в зависимости от нагрузки, в частности, крутящего момента, и/или скорости вращения многофазной электрической машины с использованием значения коррекции насыщения. Значение коррекции насыщения можно определить до применения способа, например, путем измерения на машине или путем вычислений, и сохранить, например, в таблице или смоделировать с помощью математической функции.
В одном варианте осуществления изобретения можно предусмотреть, чтобы электрический сигнал, подаваемый на многофазную электрическую машину, имел сигнал возбуждения, который по существу не зависит от основной составляющей вращающегося поля многофазной электрической машины, временная основная частота которого предпочтительно по меньшей мере в пять раз выше, более предпочтительно по меньшей мере в десять раз выше, чем частота изменения во времени основных частот напряжения в фазных обмотках (U,V,W) для создания вращающегося поля многофазной электрической машины. Предпочтительно сигнал возбуждения представляет собой сигнал напряжения. В другом варианте осуществления изобретения основная частота сигнала возбуждения по меньшей мере в два раза превышает рабочую частоту скольжения асинхронной машины. Сигнал возбуждения может быть также сформирован из последовательности по существу прямоугольных импульсов напряжения (ступенчатых функций), которые могут быть сформированы как посредством отдельных операций переключения преобразователя, так и путем комбинации нескольких отдельных импульсов с временной ступенчатой формой и/или циклов различной продолжительности.
В одном варианте осуществления изобретения предусмотрено, что сигнал электрического возбуждения является сигналом тока, и что характеристика многофазной электрической машины, в частности, напряжение многофазной электрической машины, оценивается для определения интермодуляционной составляющей сигнала.
Вышеупомянутая задача также решена с помощью системы многофазной электрической машины по п.10. Трехфазная система содержит:
многофазную электрическую машину, в частности, асинхронную машину, содержащую ротор, статор и по меньшей мере две фазные обмотки;
блок питания, в частности, преобразователь, который электрически соединен с многофазной электрической машиной, причем блок питания выполнен с возможностью подачи сигналов возбуждения, в частности, сигналов напряжения или сигналов тока по меньшей мере на одну фазную обмотку, предпочтительно на все фазные обмотки многофазной электрической машины;
по меньшей мере одно измерительное устройство, которое выполнено с возможностью измерения или определения временной формы отклика машины, в частности, формы сигнала тока или формы сигнала напряжения по меньшей мере в одной фазной обмотке, или в звене постоянного тока преобразователя, или в источнике питания для преобразователя или в источнике питании преобразователя на стороне машины,
блок управления, который выполнен с возможностью управления многофазной электрической машиной на основе интермодуляционной составляющей сигнала, вызванной пазовыми эффектами и эффектами магнитного насыщения в многофазной электрической машине, причем эта интермодуляционная составляющая сигнала содержится по меньшей мере в одной измеренной форме сигнала тока, в частности, в скорости его изменения.
Многофазная электрическая машина выполнена с возможностью выполнения способа, описанного выше. Для получения информации о преимуществах, технических эффектах и других характеристиках следует обращаться к описанному выше способу. Блок питания может формировать сигналы возбуждения посредством операций переключения. Для этой цели блок питания может содержать множество электрических переключателей, например полупроводниковые переключатели. Измерительное устройство может содержать по меньшей мере один датчик измерения тока или напряжения. Предпочтительно, измерительное устройство можно использовать для определения формы сигнала тока на всех фазах многофазной электрической машины. Для этого в каждой фазной обмотке многофазной электрической машины может быть предусмотрен датчик измерения тока. Для m-фазных обмоток может быть также предусмотрен датчик измерения тока только в m-1 фазных обмотках, и ток m-й фазной обмотки может быть вычислен с использованием правила узлов.
Фазные токи многофазной электрической машины могут быть также определены или рассчитаны путем измерения в звене постоянного тока преобразователя, в источнике питания преобразователя или на входе преобразователя на стороне машины.
Например, блок управления может быть автономным блоком или частью другого блока, в частности, микропроцессором. Блок управления может быть встроен в преобразователь. Фазные обмотки многофазной электрической машины образуют катушки или соединены с катушками, которые могут создавать магнитный поток в воздушном зазоре между ротором и статором многофазной электрической машины.
Краткое описание чертежей
Далее изобретение описывается со ссылкой на фигуры, которые не предназначены для его ограничения.
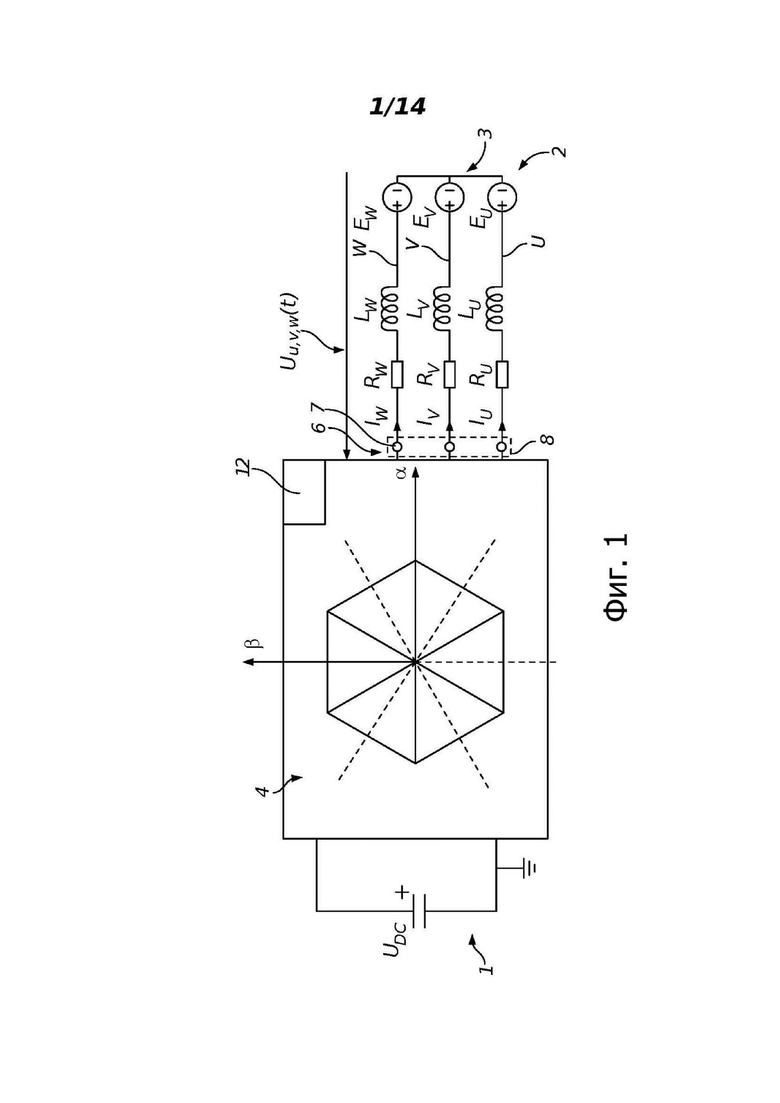
На фиг.1 показан схематичный вид системы многофазной электрической машины с преобразователем и многофазной электрической машиной;
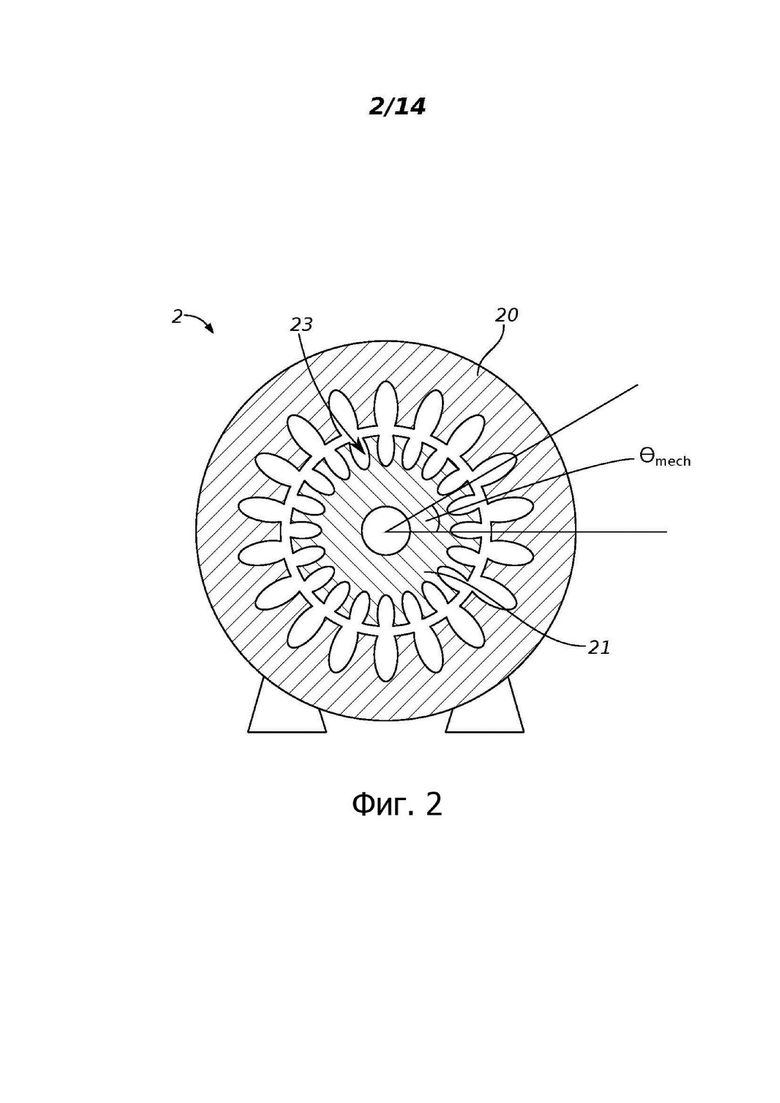
на фиг.2 показана асинхронная машина в поперечном сечении;
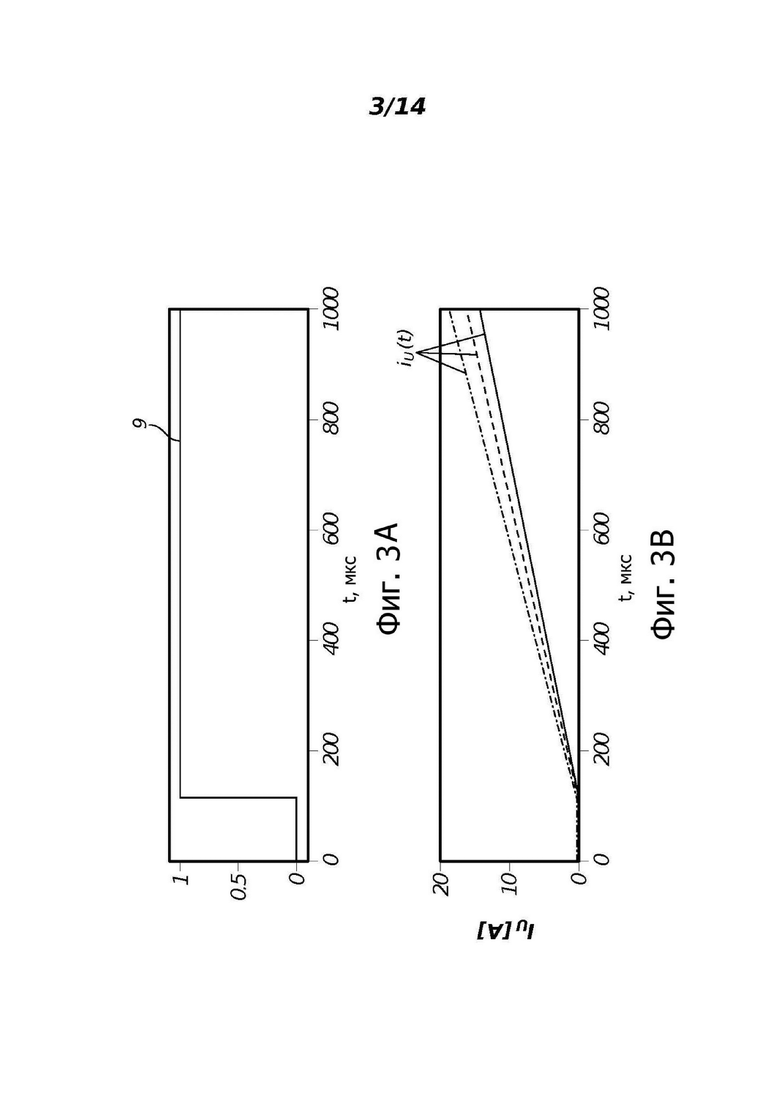
на фиг.3A показан схематичный вид примерного сигнала возбуждения;
на фиг.3B показаны схематичные формы сигнала тока в отклике на сигнал возбуждения согласно фиг.3A (в различных положениях ротора);
на фиг.4A показан объединенный сигнал во временной области, который был сформирован из комбинации форм сигналов тока всех фазных обмоток многофазной электрической машины;
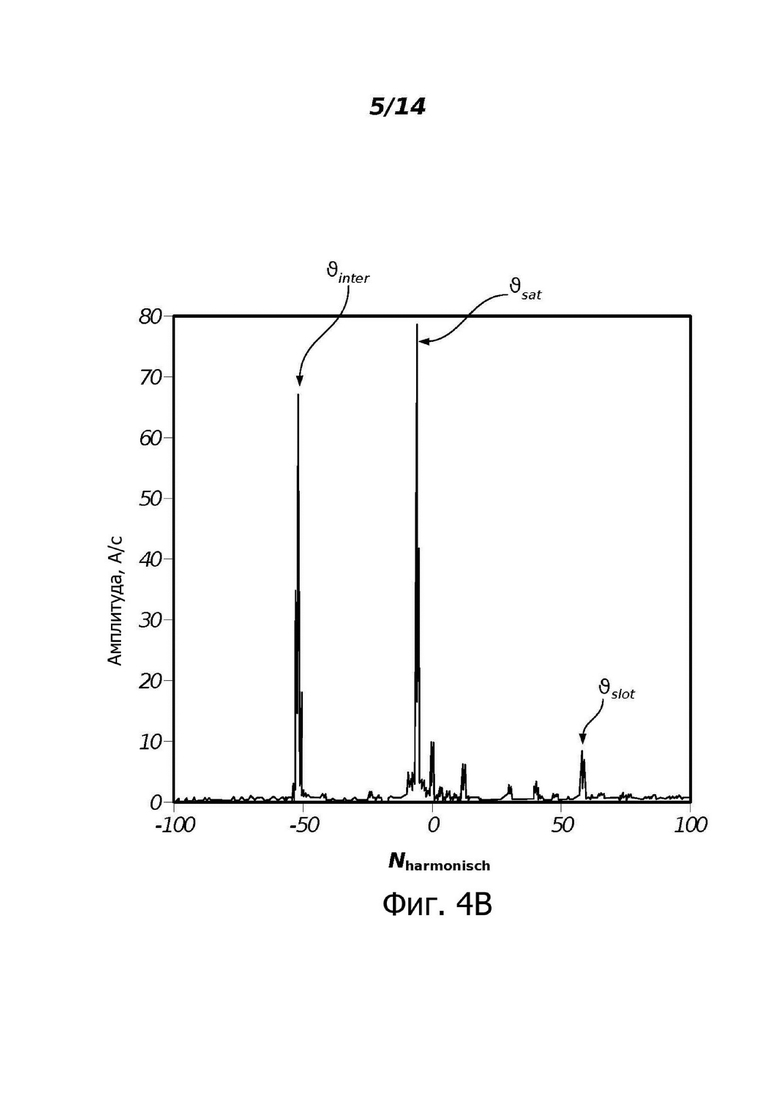
на фиг.4B показан объединенный сигнал фиг.4A в частотной области;
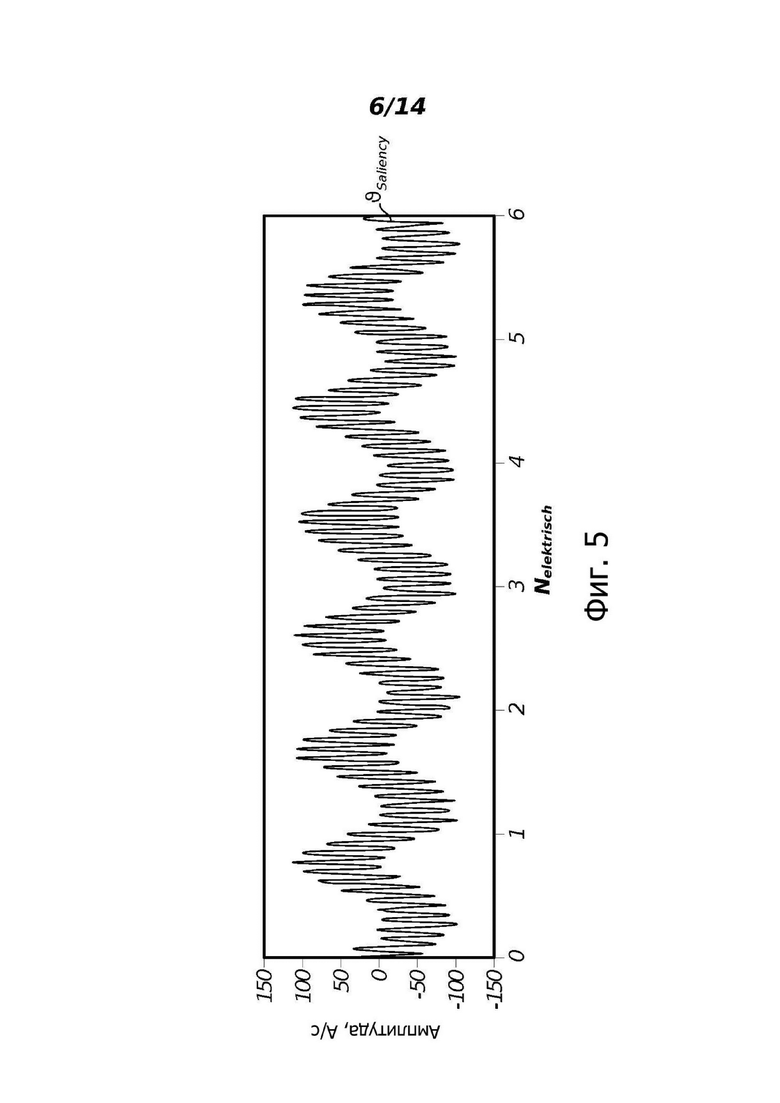
на фиг.5 показана действительная составляющая объединенного сигнала;
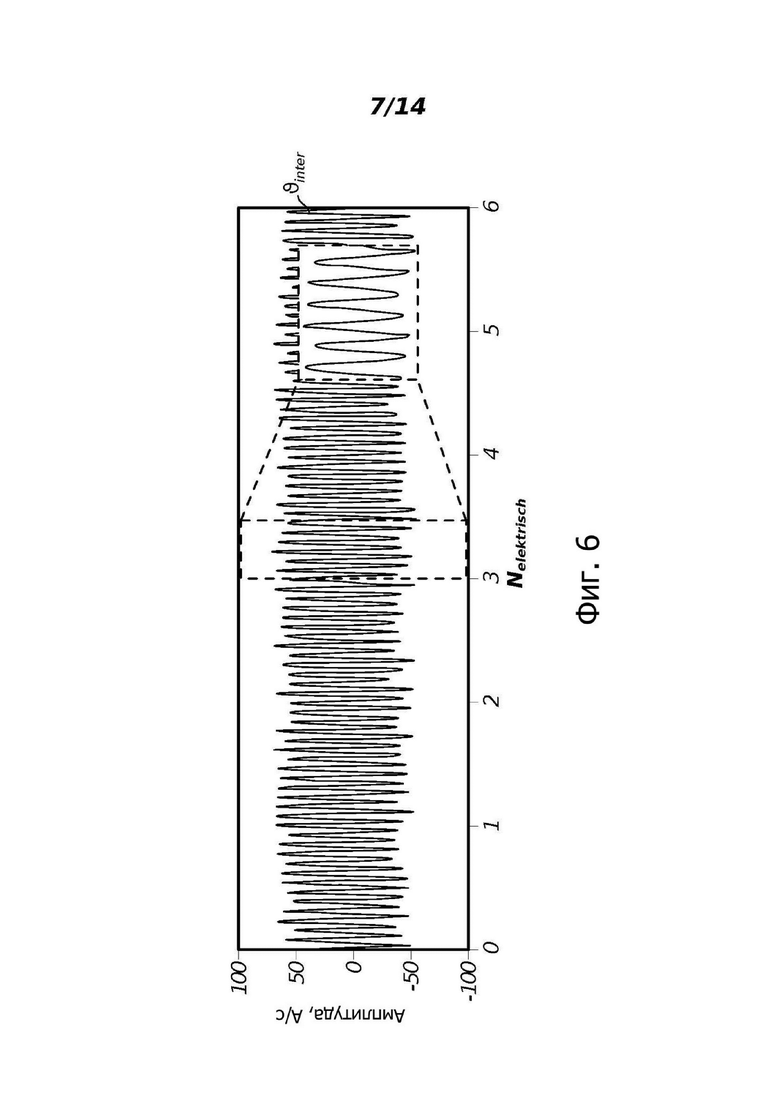
на фиг.6 показана действительная составляющая интермодуляционной составляющей сигнала;
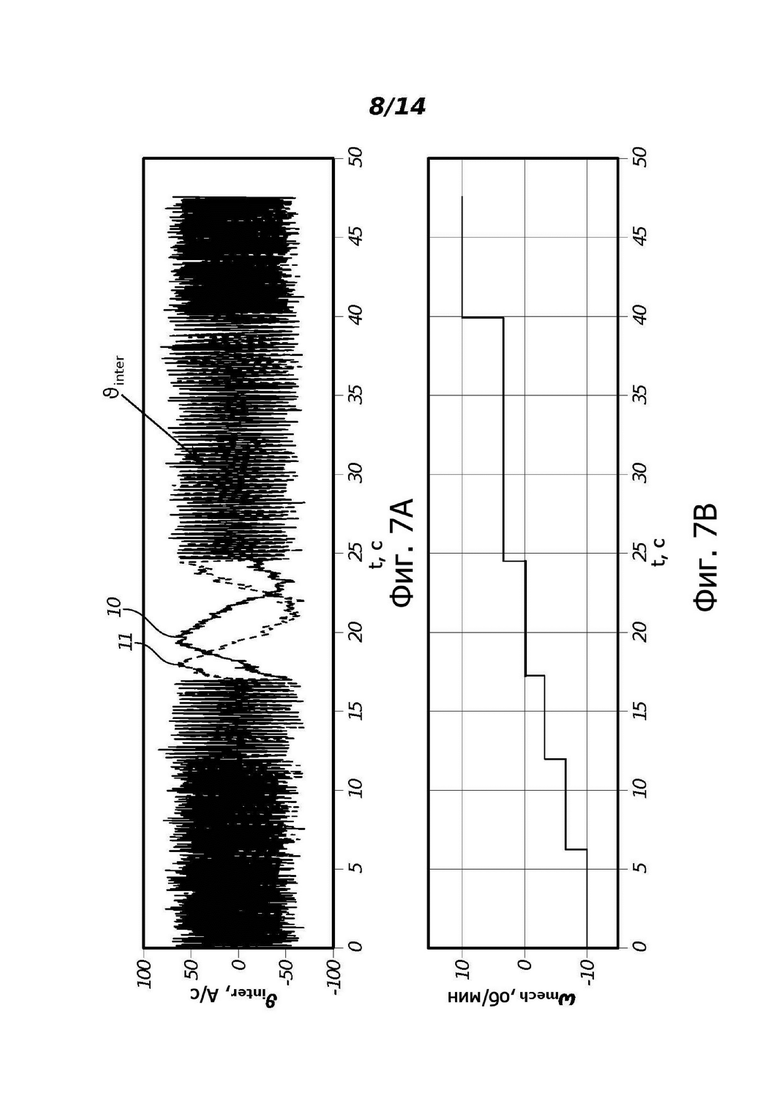
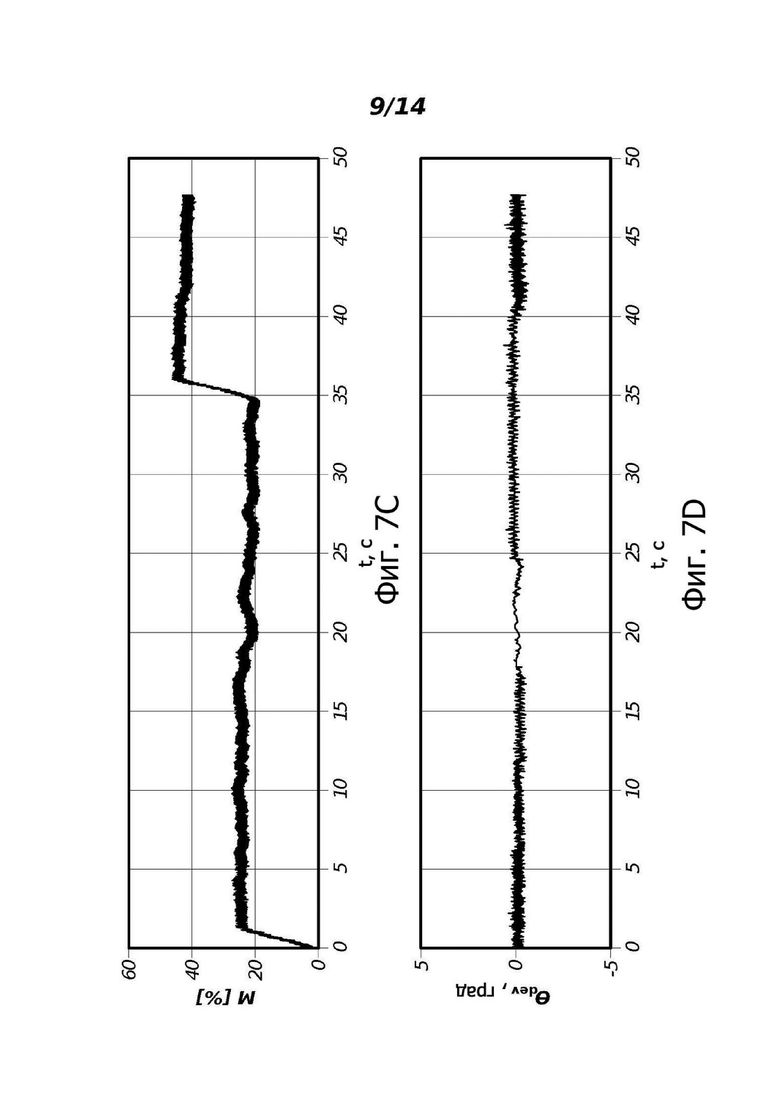
на фиг.7A-D показаны разные формы сигналов многофазной электрической машины в разных рабочих состояниях многофазной электрической машины;
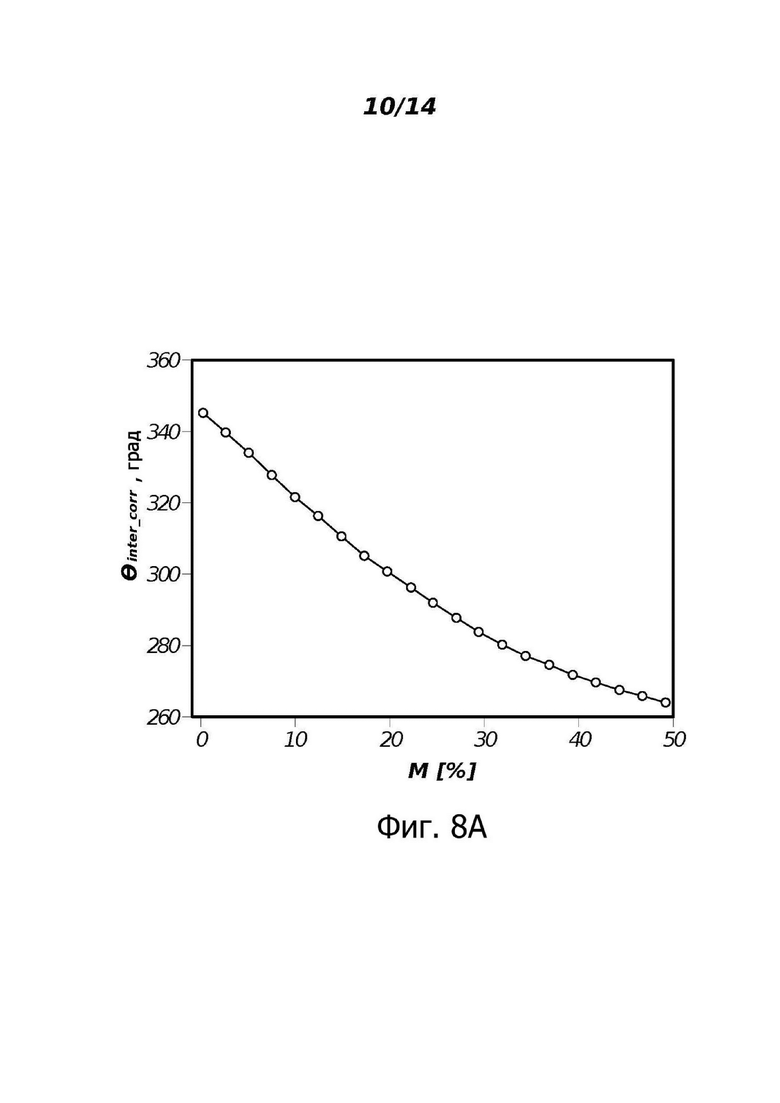
на фиг.8A-C показаны формы кривой значений коррекции;
на фиг.9 показана блок-схема в качестве примера реализации изобретения; и
на фиг.10A-C показаны сигналы возбуждения и результирующие формы кривой тока.
Подробное описание изобретения
Далее, способ согласно изобретению поясняется более подробно на основе применения к асинхронной машине.
На фиг.1 показан схематичный вид системы 1 многофазной электрической машины с многофазной электрической машиной 3, спроектированной как асинхронная машина 2, приводимой в действие преобразователем 4, который имеет множество электронных переключателей (не показаны), например полупроводниковые переключатели. Преобразователь 4 выполнен с возможностью вывода напряжений с заданными частотами, амплитудами и (нулевыми) фазными углами на выходе 6 посредством соответствующих операций переключения. Выход 6 преобразователя 4 подключен к фазным обмоткам U, V, W многофазной электрической машины 2. За счет вырабатываемых преобразователем 4 напряжений в воздушном зазоре индукционной машины 2 между ротором 21 и статором 20 (смотри фиг.2) создается вращающееся магнитное поле, которое индуцирует напряжения в роторе 21 асинхронной машины 2 и приводит ротор во вращение за счет возникающих в результате токов ротора.
На фиг.1 схематично показана асинхронная машина 2 в виде принципиальной схемы. Асинхронная машина 2 имеет три фазные обмотки U, V, W с сопротивлениями фазных обмоток RU, RV, RW и индуктивностями фазных обмоток LU, LV, LW, соответственно. Напряжения EU, EV, EW обозначают напряжения (противо-ЭДС), индуцированные в статоре 20 многофазной электрической машины 2. Токи IU, IV, IW, протекающие в фазных обмотках U, V, W, могут быть измерены или определены с использованием токоизмерительных датчики 7a и/или 7b измерительного устройства 8a или 8b, соответственно. Фазные токи можно также определить с помощью токоизмерительных датчиков 7b, например, на основе тока, протекающего в преобразователе 4. Вполне возможно, что токоизмерительный датчик 7a предусмотрен в каждой фазной обмотке U, V, W. Токоизмерительные датчики 7a или 7b могут быть интегрированы в преобразователь 4 или могут быть независимыми элементами. С помощью токоизмерительных датчиков 7a и/или 7b можно определить временные формы токов iU(t), iV(t), iW(t) токов IU, IV, IW в фазных обмотках U, V, W.
На фиг.2 схематично показана асинхронная машина 2 без обмоток в поперечном сечении со статором 20, ротором 21 и пазом 23 на роторе 21 и статоре 20. Для иллюстрации указано угловое положение θmech(t) ротора 21.
Как упомянуто выше, асинхронная машина 2 имеет асимметрию, которая может изменяться в зависимости от времени и положения, что позволяет получать информацию об угловом положении θmech(t) и/или скорости вращения ротора 21. Примером такой асимметрии является наличие пазов (зубчатость) 23 ротора 21 и/или статора 20. Другим примером асимметрии является насыщение путей магнитного потока в асинхронной машине 2. Обе асимметрии вызывают временные и пространственные изменения индуктивности при работе асинхронной машины 2, которые можно определить путем оценки форм тока iU(t), iV(t), iW(t). Например, в сильно упрощенной модели для иллюстрации асимметрии можно предположить, например, что каждая из индуктивностей трех фазных обмоток LU, LV, LW в фазных обмотках U, V, W имеет среднее значение L0 и, в зависимости от механического углового положения θmech(t) ротора 21, отклоняется от этого среднего значения L0 синусоидально (с амплитудой LM):
 (6A)
(6A)
 (6B)
(6B)
 (6C)
(6C)
Таким образом, изменение углового положения θmech(t) ротора 21 также приводит к изменению индуктивностей LU, LV, LW. Поэтому составляющие переменной индуктивности могут также называться модулированными индуктивностями. Изменения индуктивностей LU, LV, LW могут быть вызваны, например, пазом 23 ротора 21 или статора 20 и/или магнитным насыщением дорожек из магнитного железа в многофазной электрической машине 3.
Определение углового положения θmech(t) ротора 21 для асинхронных машин 2 до сих пор представляло собой серьезную проблему, так как асинхронные машины 2, в частности, по сравнению с большинством синхронных машин 2, имеют значительно меньшую асимметрию и, следовательно, значительно меньшие колебания индуктивности при работе.
Для определения изменений индуктивности электрические сигналы, предпочтительно сигналы напряжения UU(t), UV(t), UW(t), подаются на фазные обмотки U, V, W асинхронной машины 2 и результирующие формы тока iU(t), iV(t), iW(t) измеряются с помощью датчиков тока 7. Напряжения или импульсы напряжения, подаваемые преобразователем 4 для работы асинхронной машины 2, могут использоваться в качестве сигналов напряжения UU(t), UV(t), UW(t). Электрические сигналы могут содержать сигналы 9 возбуждения для определения рабочего состояния многофазной электрической машины 3. Сигналы 9 возбуждения могут быть по существу независимыми от создания вращающегося поля многофазной электрической машины 3. В данном случае можно использовать сигналы 9 возбуждения, которые прикладываются между напряжениями (импульсами), формируемыми преобразователем 4 для создания вращающегося поля, или наложенными на них. Также можно использовать формы напряжения с частотами выше, чем та, которая используется для выработки основной составляющей вращающегося поля.
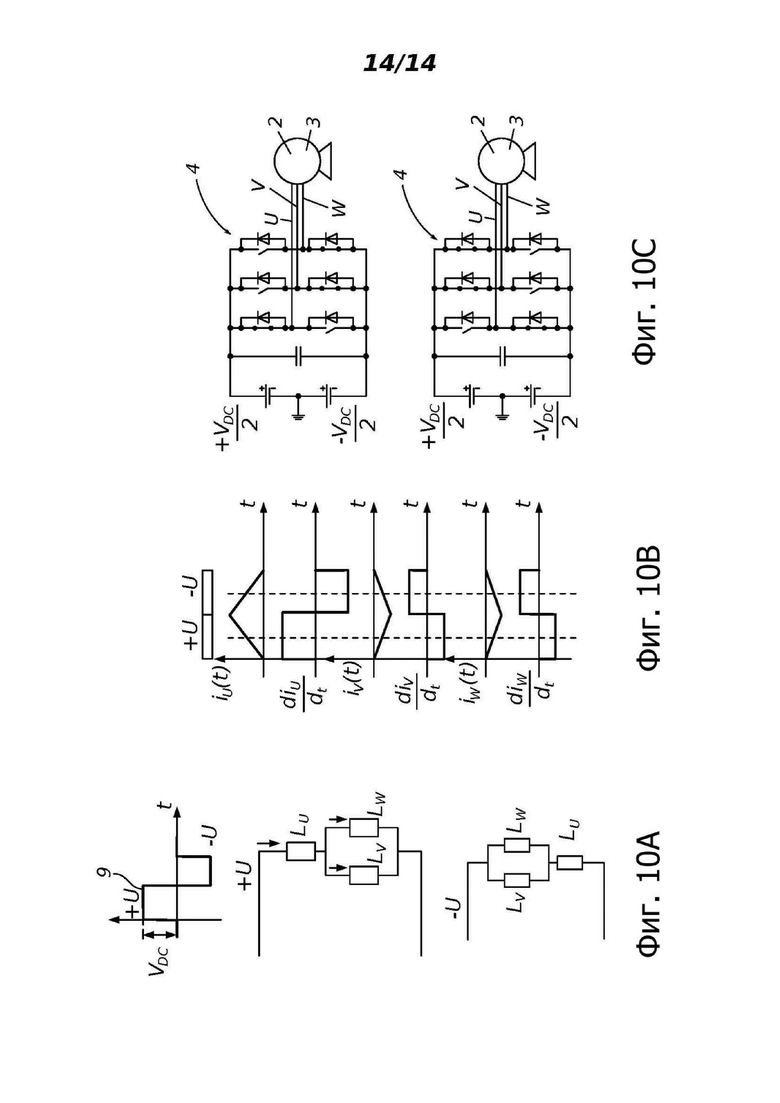
На фиг.10A-C показаны подача примерного сигнала 9 возбуждения и результирующие формы тока iU(t), iV(t), iW(t) в фазных обмотках U, V, W многофазной электрической машины 3. Любыми омическими сопротивлениями здесь можно пренебречь. На фиг.10A-C показаны два положения переключателя преобразователя 4, с помощью которых может быть сформирован прямоугольный сигнал 9 возбуждения с положительным напряжением +U и отрицательным напряжением -U (амплитуда постоянного напряжения). Если подается такой сигнал 9 возбуждения, который показан в зависимости от времени t на верхнем частичном изображении фиг.10A, как показано на фиг.10B, соответствующее увеличение токов diU/dt, diV/dt, diW/dt получается в виде форм тока iU(t), iV(t), iW(t). На фиг.10B показаны формы тока iU(t), iV(t), iW(t) и наклоны тока diU/dt, diV/dt, diW/dt каждой фазной обмотки U, V, W. Электрические эквивалентные схемы многофазной электрической машины 2 с приложенными напряжениями +U и -U сигнала 9 возбуждения показаны на двух нижних изображениях фиг.10A. Если подается сигнал 9 возбуждения, с положительным напряжением +U (с условным обозначением электрического знака в соответствии с фиг.1) в фазной обмотке U сначала возникает положительный наклон тока diU/dt (и, таким образом, положительное падение напряжения на индуктивности LU фазной обмотки) и отрицательный наклон тока diV/dt или diW/dt в каждой из фазных обмоток V и W (и, таким образом, отрицательное падение напряжения на индуктивностях LV и LW фазных обмоток). При отрицательном напряжении -U сигнала 9 возбуждения дело обстоит наоборот.
По причине различных индуктивностей фазных обмоток LU, LV, LW из-за асимметрии в многофазной электрической машине 3 получается дополнительное отклонение наклонов тока diU/dt, diV/dt, diW/dt. Это дополнительное отклонение не показано на фиг.10B, но его можно увидеть на фиг.3B.
В одном варианте осуществления прямоугольные сигналы 9 возбуждения, такие как те, что показаны на фиг.3A, подаются на фазные обмотки U, V, W асинхронной машины 2 для определения индуктивности. На фиг.3A показан сигнал 9 возбуждения в нормированной форме. В результате такого сигнала 9 возбуждения, который может подаваться, например, между импульсами напряжения, подаваемыми для создания вращающегося поля в асинхронной машине 2, наклон тока diU/dt, diV/dt, diW/dt возникает в фазных обмотках U, V, W из-за взаимосвязи, показанной в уравнении (2). В данном случае любым омическим сопротивлением можно пренебречь.
В качестве примера на фиг.3В показаны три разных наклона diU/dt фазного тока IU в фазной обмотке U в разное время и, таким образом, для разных индуктивностей LU фазной обмотки из-за асимметрии многофазной электрической машины 3 (сравни уравнение 6A-6C). Аналогичные иллюстрации также применимы к остальным фазным обмоткам V и W. Иллюстрации, показанные на фигурах, были упрощены и предназначены для схематичной иллюстрации принципа определения индуктивности. Изменение форм тока iU(t), iV(t), iW(t) во времени позволяет получить информацию об изменении индуктивностей LU, LV, LW.
Наклоны токов diU/dt, diV/dt, diW/dt в фазных обмотках U, V и W, определяемые предпочтительно через равные промежутки времени, затем могут быть объединены с использованием математического уравнения в объединенный сигнал ϑSaliency. Однако, в частности, в случае синусоидальных сигналов 9 возбуждения, могут быть также использованы и объединены значения токов, то есть амплитуды, или среднеквадратичные значения, или мгновенные значения токов IU, IV, IW. Предпочтительно математическое уравнение для вычисления пространственного вектора используется, например, для объединения форм токов,
 . (4b)
. (4b)
Объединенный сигнал ϑSaliency может быть также назван "сигналом значимости". Когда сигнал ϑSaliency вычисляется как пространственный вектор, ϑSaliency представляет собой тензор.
На фиг.4А показан след тензора ϑSaliency, где как по оси абсцисс, так по и оси ординат отложена амплитуда в амперах/сек. Абсцисса представляет собой действительную часть, и ордината – мнимую часть сигнала ϑSaliency.
На фиг.4B показан сигнал ϑSaliency, показанный на фиг.4А в частотной области, где по оси абсцисс отложены гармоники Nharmonisch сигнала. Как можно видеть на фиг.4В, ϑSaliency содержит три отдельных составляющих сигнала. Первая заметная составляющая сигнала образуется пазовой составляющей ϑslot сигнала, которая относится к пазам 23 ротора 21 и статора 20 многофазной электрической машины 3. Вторая заметная составляющая сигнала формируется составляющей ϑsat насыщения, что связано с магнитным насыщением путей магнитного потока в многофазной электрической машине 3. Третья важная составляющая сигнала формируется интермодуляционной составляющей ϑinter сигнала, которая относится к физической взаимосвязи пазовой составляющей ϑslot сигнала и составляющей ϑsat насыщения сигнала. Пазовая составляющая ϑslot сигнала, составляющая ϑsat насыщения сигнала и интермодуляционная составляющая ϑinter сигнала имеют разные основные частоты.
В известном уровне техники при бессенсорном управлении, в котором используется информация о пазе, интермодуляционная составляющая ϑinter сигнала и составляющая ϑsat насыщения сигнала были предварительно удалены как помеховые сигналы, и пазовая составляющая ϑslot сигнала использовалась для определения углового положения и/или скорости вращения ротора. Однако, как можно увидеть на фиг.4B, в данном случае пазовая составляющая ϑslot сигнала относительно мала по сравнению с другими составляющими сигнала. В связи с этим возможны затруднения при определении и извлечении пазовой составляющей ϑslot сигнала, в частности, при более высоких нагрузках многофазной электрической машины 3. На фиг.4В пазовая составляющая ϑslot сигнала уже имеет приблизительно один и тот же порядок величины высших гармоник как и составляющая ϑsat насыщения.
Таким образом, согласно изобретению, не предлагается использовать пазовую составляющую ϑslot сигнала непосредственно для управления многофазной электрической машиной 3, а использовать интермодуляционную составляющую ϑinter сигнала и в нее косвенно включенную информацию о пазе или угле ротора для управления электрической многофазной электрической машиной 2. Согласно изобретению способ может быть реализован в блоке 12 управления (смотри фиг.1). Интермодуляционная составляющая ϑinter сигнала является доминирующей составляющей в сигнале ϑSaliency в широком диапазоне скоростей вращения и поэтому может быть легко идентифицирована. Изобретение основано на обнаружении того факта, что существует зависимость между основной частотой интермодуляционной составляющей ϑinter сигнала и основной частотой пазовой составляющей ϑslot сигнала, что позволяет получить информацию об угловом положении и/или скорости вращения ротора 21. Зависимость может быть описана с помощью уравнения (1)
(1)
где ωinter – основная частота интермодуляционной составляющей ϑinter сигнала, ωsat – основная частота составляющей ϑsat насыщения, и ωslot – основная частота пазовой составляющей ϑslot сигнала. Знак ωsat зависит от конструкции и дизайна многофазной электрической машины 3.
Чтобы определить угловое положение ротора, которое может использоваться для управления многофазной электрической машиной 2, составляющую ϑinter интермодуляционного сигнала отделяют от других составляющих сигнала, то есть по существу изолируют, например, путем фильтрации или оценки нежелательных составляющих сигналов и вычитания. Угол θinter(t) определяется из сигнала ϑinter, в частности, из его основной частоты. Угол может быть фазным углом, который изменяется со временем. Это может быть выполнено, например, с помощью системы ФАПЧ (фазовой автоподстройки частоты). Кроме того, угол, в частности, фазный угол θsat(t) составляющей θsat насыщения, определяется, в частности, из его основной частоты. Два угла θsat(t) и θinter(t) объединяются, например, с помощью уравнения
 , (5)
, (5)
чтобы получить расчетный угол θslot(t) паза. В настоящем раскрытии θ используется для обозначения углов, и ϑ представляет сигналы или составляющие сигналов. Угол θslot(t) паза, определяемый с помощью уравнения (5), является по существу вычисленным углом пазовой составляющей ϑslot сигнала. Разделив угол θslot(t) паза на количество N пазов ротора, можно определить механическое угловое положение θmech(t) ротора 21 из θslot(t). θmech(t) может впоследствии использоваться, например, для управления многофазной электрической машиной 3. Например, θmech(t) может использоваться для представления электрических переменных в системе координат, связанной с ротором, или для управления угловым положением (управления угловым положением) и/или скоростью вращения (управления скоростью) ротора.
На фиг.5 показана временная форма действительной составляющей объединенного токового сигнала ϑSaliency в секундах. Этот сигнал содержит пазовую составляющую ϑslot сигнала, составляющую ϑsat насыщения и интермодуляционную составляющую ϑinter сигнала.
На фиг.6 показана временная форма сигнала действительной части интермодуляционной составляющей ϑinter сигнала, в секундах, где были устранены пазовая составляющая ϑslot сигнала, составляющая ϑsat насыщения. Однако показанный сигнал по-прежнему содержит свои собственные гармоники и гармоники других составляющих сигналов.
На фиг.7A-D показаны формы сигналов для различных рабочих состояний асинхронной машины 2 в разные моменты времени. Время t в секундах отложено по оси абсцисс на всех фиг.7A-D. На фиг.7А показаны действительная часть 10 и мнимая часть 11 интермодуляционной составляющей ϑinter сигнала. На фиг.7B показана механическая скорость ωmech вращения ротора 21 в оборотах в минуту (об/мин) в зависимости от времени. На фиг.7С показан крутящий момент, создаваемый многофазной электрической машиной 3, по отношению к номинальному крутящему моменту в зависимости от времени. На фиг.7D показано угловое отклонение θdev между механическим угловым положением θmech(t) ротора, определенным с помощью способа согласно изобретению, и механическим угловым положением в градусах, определенным с помощью датчика угла поворота. На фиг.7D очевидно, что способ согласно изобретению, можно использовать для определения механических угловых положений θmech(t) ротора, которые имеют отклонение от фактического (измеренного) механического углового положения менее чем на 1°.
Эксперименты показали, что точность способа согласно изобретению можно дополнительно увеличить за счет учета зависимостей угла θinter(t) интермодуляционной составляющей ϑinter сигнала и угла θsat(t) составляющей ϑsat насыщения на скорости вращения и/или нагрузке многофазной электрической машины 3. Было показано, что угол θinter(t) интермодуляционной составляющей ϑinter сигнала и угол θsat(t) составляющей ϑsat насыщения могут иметь отклонения в зависимости от нагрузки, в частности, от крутящего момента M многофазной электрической машины 3. Таким образом, в одном варианте осуществления может быть предусмотрено, чтобы угол θinter(t) интермодуляционной составляющей ϑinter сигнала корректировался в зависимости от нагрузки многофазной электрической машины 3, в частности, от крутящего момента М, с помощью значения θinter_corr интермодуляционной коррекции. Зависимость θinter_corr от крутящего момента M (в % относительно номинального крутящего момента) многофазной электрической машины 3 показана на фиг.8A.
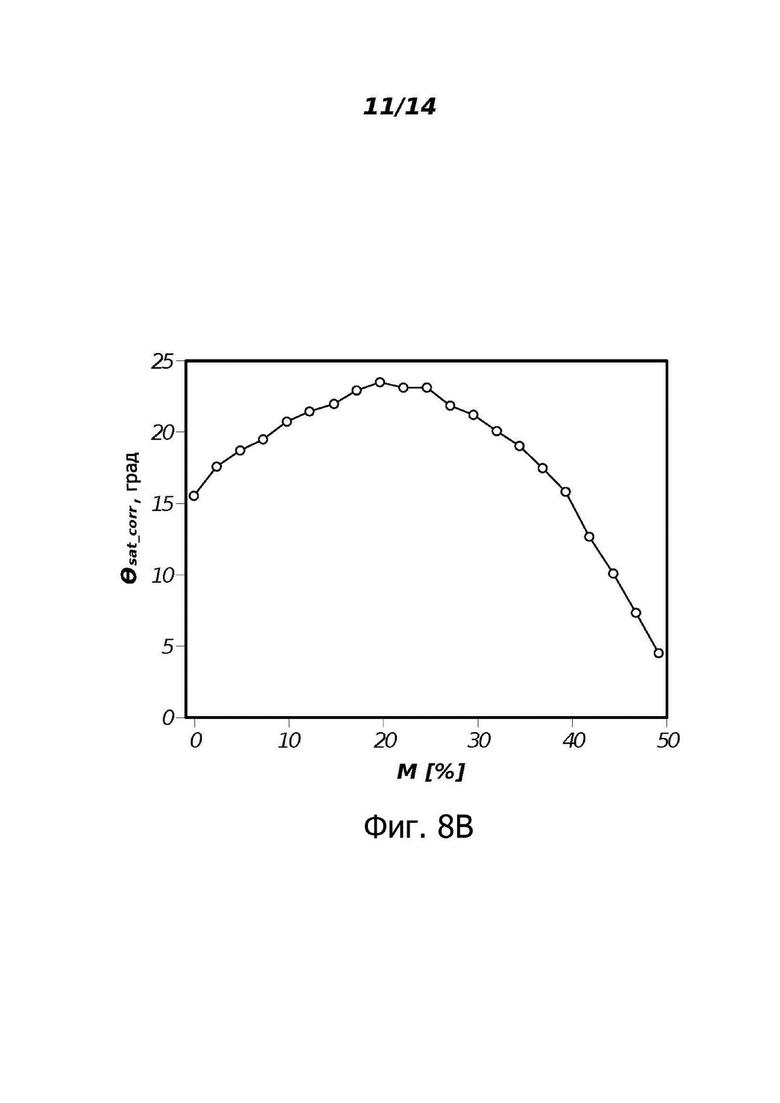
Может быть также предусмотрено, что угол θsat(t) составляющей ϑsat насыщения корректируется в зависимости от нагрузки и скорости вращения многофазной электрической машины 3, в частности, крутящего момента M, посредством значения θsat_corr коррекции насыщения. Зависимость θsat_corr от крутящего момента M (в % относительно номинального крутящего момента) многофазной электрической машины 3 показана на фиг.8B.
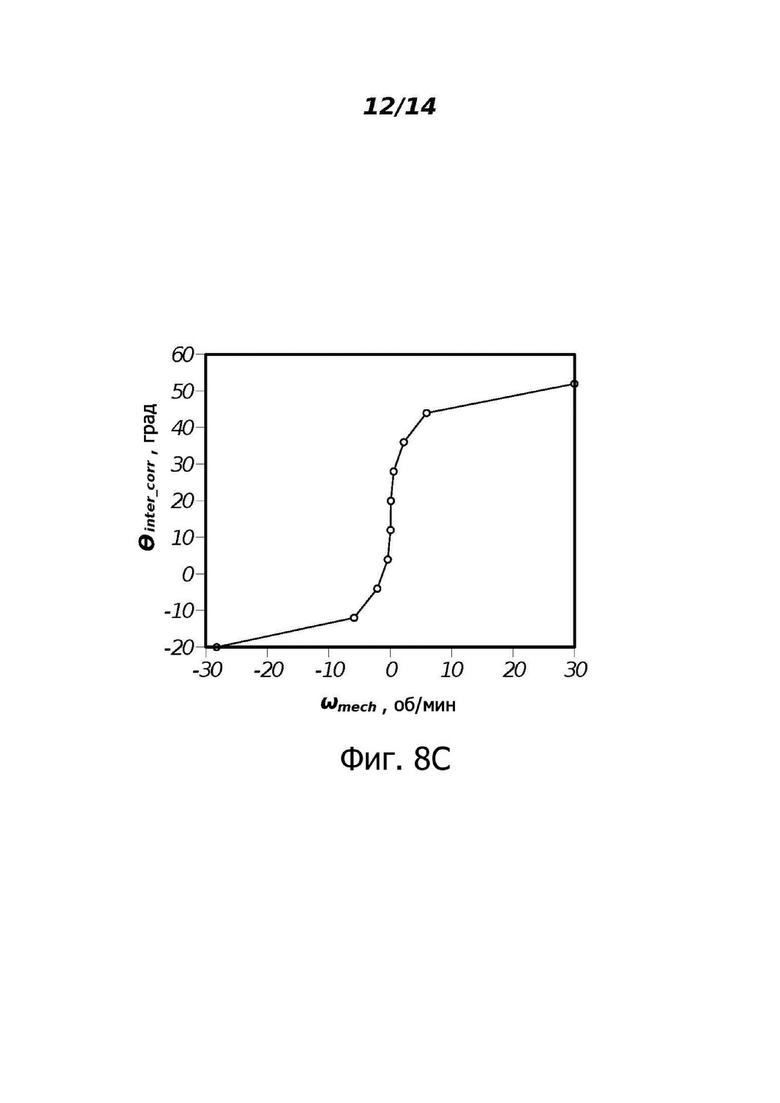
Угол θinter интермодуляционной составляющей ϑinter сигнала может зависеть также от скорости вращения многофазной электрической машины 3 (см. фиг.8C). Эта зависимость может быть также принята во внимание посредством значения θinter_corr интермодуляционной коррекции в дополнение к зависимости крутящего момента или в качестве альтернативы ей.
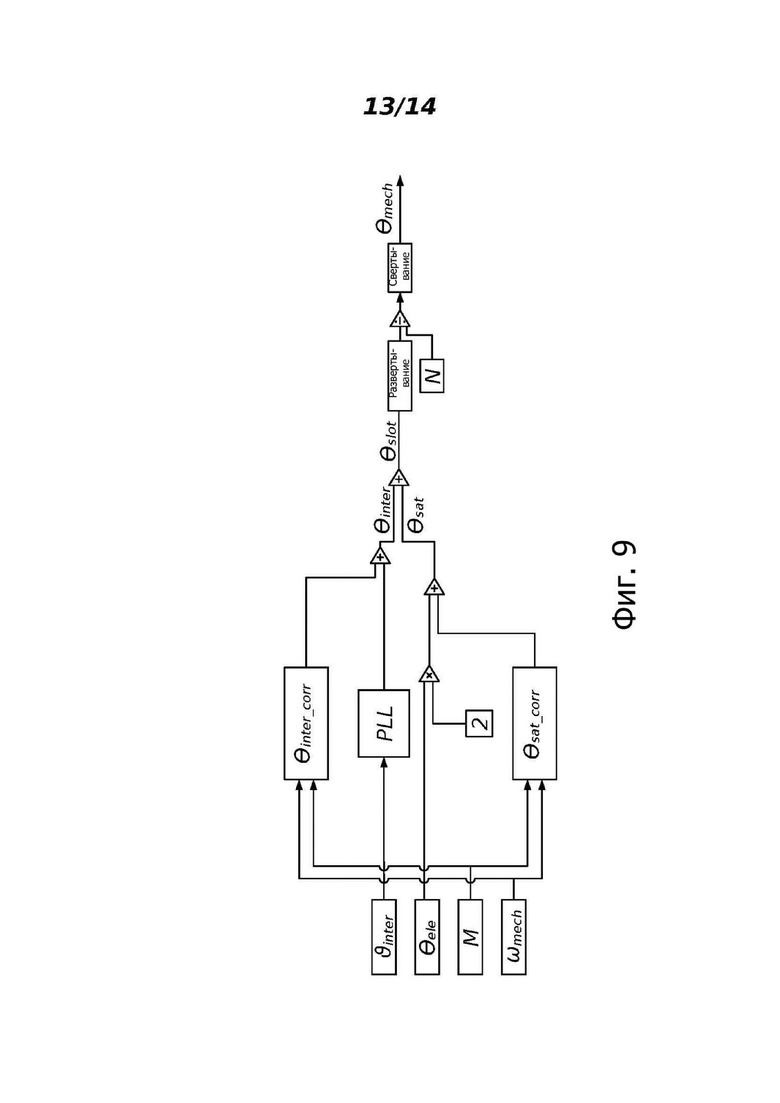
На фиг.9 показано схематичное представление возможной реализации способа согласно изобретению. В показанном примерном варианте осуществления используемыми входными переменными являются интермодуляционная составляющая ϑinter сигнала, электрический угол θele(t), крутящий момент М и механическая угловая скорость ωmech. θele(t) представляет собой угол основной составляющей тока статора и может быть определен из измеренных фазных токов IU, IV, IW, например, в виде пространственных векторов. ωmech можно определить из интермодуляционной составляющей ϑinter сигнала. Умножая электрический угол θele(t), предпочтительно на коэффициент 2, можно получить угол θsat(t) составляющей ϑsat насыщения, который может быть скорректирован посредством предварительно определенного значения коррекции насыщения θsat_corr. С помощью блока обработки сигнала с фазовой автоподстройкой частоты (ФАПЧ), угол θinter(t) интермодуляционной составляющей ϑinter сигнала может быть получен из интермодуляционной составляющей ϑinter сигнала и скорректирован с помощью значения интермодуляционной коррекции θinter_corr. Объединяя два угла θinter(t) и θsat(t), в частности, используя уравнение (5), можно вычислить пазовый угол θslot(t). Пазовый угол θslot(t) вычисляется в блоке UNWRAP для получения когерентного углового пути (развернутая фаза), и затем делится на количество пазов N ротора для получения механического углового положения θmech(t) ротора. Затем механическое угловое положение может быть снова преобразовано обратно в блоке WRAP, так что θmech(t) будет представлен в угловом интервале, в частности, между [-180°; 180°] или [0°; 360°] (свернутая фаза). θmech(t) может затем использоваться для управления многофазной электрической машиной 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНОЙ | 2009 |
|
RU2481694C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА, В ЧАСТНОСТИ СИНХРОННЫЙ ДВИГАТЕЛЬ С РЕЗЕРВИРОВАННЫМИ СТАТОРНЫМИ ОБМОТКАМИ | 2007 |
|
RU2402140C2 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2559197C2 |
| Бесконтактная многофазная электрическая машина | 1986 |
|
SU1681364A1 |
| МОДУЛЬНАЯ МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2633379C2 |
| Способ управления многофазным электродвигателем | 1977 |
|
SU736329A1 |
| Якорь многофазной электрической машины | 2018 |
|
RU2684898C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| ЯКОРЬ МНОГОФАЗНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1996 |
|
RU2121207C1 |
| Многофазная индукторная машина | 1985 |
|
SU1390727A1 |

Группа изобретений относится к способу и системе управления многофазной электрической машиной, в частности асинхронной машиной. Асинхронная машина содержит: ротор, статор и минимум две фазные обмотки. Способ управления включает: подачу минимум одного электрического сигнала, в частности сигнала напряжения минимум на одну фазную обмотку и измерение или определение формы электрического сигнала (формы тока), минимум в одной фазной обмотке. При этом для управления многофазной электрической машиной используют интермодуляционную составляющую сигнала, вызванную пазовыми эффектами и эффектами магнитного насыщения в многофазной электрической машине. Интермодуляционную составляющую сигнала определяют из указанной формы сигнала, определенной или измеренной минимум в одной фазной обмотке. Достигается определение углового положения и/или скорости вращения ротора многофазной электрической машины посредством формы электрического сигнала. 2 н. и 12 з.п. ф-лы, 19 ил.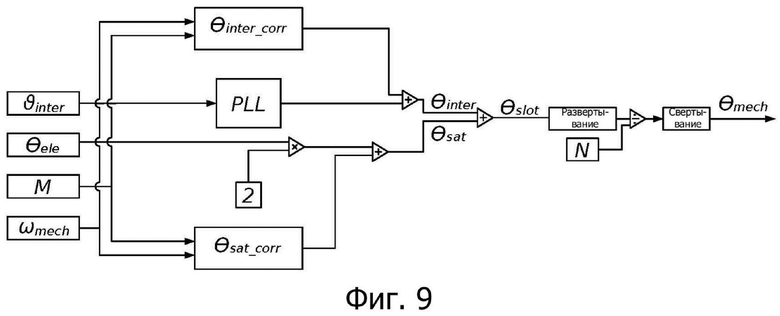
1. Способ управления многофазной электрической машиной (3), в частности асинхронной машиной (2), содержащей ротор (21), статор (20) и по меньшей мере две фазные обмотки (U,V,W), включающий подачу по меньшей мере одного электрического сигнала, в частности сигнала напряжения (UU,V,W(t)) по меньшей мере на одну фазную обмотку (U,V,W), предпочтительно на все фазные обмотки (U,V,W), многофазной электрической машины (3) и измерение или определение формы электрического сигнала, в частности формы (iU,V,W(t)) тока, по меньшей мере в одной фазной обмотке (U,V,W),
отличающийся тем, что для управления многофазной электрической машиной (1) используют интермодуляционную составляющую (ϑinter) сигнала, вызванную пазовыми эффектами и эффектами магнитного насыщения в многофазной электрической машине, причем интермодуляционную составляющую сигнала определяют из указанной формы сигнала, определенной или измеренной по меньшей мере в одной фазной обмотке (U,V,W).
2. Способ по п.1, отличающийся тем, что механическое угловое положение (θmech(t)) и/или скорость вращения ротора определяют из интермодуляционной составляющей (ϑinter) сигнала, и указанные угловое положение (θmech(t)) и/или скорость вращения используют для управления многофазной электрической машиной (3).
3. Способ по п.1 или 2, отличающийся тем, что интермодуляционную составляющую (ϑinter) сигнала определяют из скорости изменения указанной по меньшей мере одной формы сигнала, в частности формы тока (iU,V,W(t)).
4. Способ по любому из пп.1-3, отличающийся тем, что определяют по меньшей мере в двух фазных обмотках (U,V,W), в частности в трехфазных обмотках (U,V,W), многофазной электрической машины (3) формы сигналов тока (iU,V,W(t)), в частности их скорости изменения (diU,V,W(t)/dt), и указанные формы сигналов тока (iU,V,W(t)), в частности их скорости изменения (diU,V,W(t)/dt), объединяют с помощью математического уравнения для формирования объединенного сигнала (ϑSaliency), а интермодуляционную составляющую (ϑinter) сигнала определяют из объединенного сигнала (ϑSaliency).
5. Способ по п.4, отличающийся тем, что математическое уравнение представляет собой уравнение для вычисления тензора, в частности пространственного вектора.
6. Способ по любому из пп.1-5, отличающийся тем, что интермодуляционную составляющую (ϑinter) сигнала извлекают путем исключения других составляющих сигнала, предпочтительно путем устранения составляющих насыщения (ϑsat), обусловленных эффектами магнитного насыщения в многофазной электрической машине (3), и/или пазовых составляющих (ϑslot), обусловленных пазовыми эффектами.
7. Способ по п.6, отличающийся тем, что исходя из угла (θinter(t)) интермодуляционной составляющей (ϑinter) сигнала определяют пазовый угол (θslot(t)) путем объединения угла (θinter(t)) интермодуляционной составляющей (ϑinter) сигнала с углом (θsat(t)) составляющей (ϑsat) насыщения, содержащейся по меньшей мере в одной форме сигнала, например, с использованием следующего правила расчета:
 .
.
8. Способ по п.7, отличающийся тем, что механическое угловое положение (θmech(t)) ротора определяют путем деления пазового угла (θslot(t)) на количество пазов ротора.
9. Способ по п.7 или 8, отличающийся тем, что угол (θinter(t)) интермодуляционной составляющей (ϑinter) сигнала корректируют с помощью значения интермодуляционной коррекции (θinter_corr) в зависимости от скорости вращения ротора (21) и/или нагрузки многофазной электрической машины (3), в частности крутящего момента (M).
10. Способ по любому из пп.7-9, отличающийся тем, что угол (θsat(t)) составляющей (ϑsat) насыщения сигнала корректируют посредством значения (θsat_corr) коррекции насыщения в зависимости от скорости вращения ротора и/или нагрузки многофазной электрической машины (3), в частности крутящего момента (M).
11. Способ по любому из пп.1-10, отличающийся тем, что электрический сигнал содержит сигнал (9) возбуждения, который по существу не зависит от генерации основной гармоники многофазной электрической машины (3), и основная частота которого предпочтительно по меньшей мере в пять раз больше, даже предпочтительно по меньшей мере в десять раз больше, чем изменение частоты со временем основной гармоники напряжений в фазной обмотке (U,V,W) для генерации основной гармоники многофазной электрической машины (3).
12. Способ по любому из пп.1-11, отличающийся тем, что электрический сигнал представляет собой сигнал тока, и отклик многофазной электрической машины (3) на сигнал тока оценивают для того, чтобы определить интермодуляционную составляющую (ϑinter) сигнала.
13. Система многофазной электрической машины (1), содержащая:
многофазную электрическую машину (3), в частности асинхронную машину (2), содержащую ротор, статор и по меньшей мере две фазные обмотки (U,V,W);
преобразователь (4), электрически соединенный с многофазной электрической машиной (3), причем преобразователь (4) выполнен с возможностью подачи электрических сигналов, в частности сигналов напряжения (UU, V, W), по меньшей мере на одну фазную обмотку (U,V,W), предпочтительно на все фазные обмотки (U,V,W) многофазной электрической машины (3);
по меньшей мере одно измерительное устройство (8a, 8b), выполненное с возможностью измерения или определения по меньшей мере одной формы электрического сигнала, в частности формы тока (iU,V,W(t)), в указанной по меньшей мере одной фазной обмотке (U,V,W),
отличающаяся тем, что
содержит блок (12) управления, выполненный с возможностью управления многофазной электрической машиной (3) на основе интермодуляционной составляющей (ϑinter) сигнала, вызванной пазовыми эффектами и эффектами магнитного насыщения в многофазной электрической машине (3), причем интермодуляционная составляющая (ϑinter) сигнала содержится в указанной по меньшей мере одной измеренной форме сигнала.
14. Система многофазной электрической машины (1) по п.13, отличающаяся тем, что блок (12) управления интегрирован в преобразователь (4).
| WO 9219038 A1, 29.10.1992 | |||
| JP S61231615 A, 15.10.1986 | |||
| EP 0228535 A1, 15.07.1987 | |||
| US 2007182359 A1, 09.08.2007 | |||
| WO 2009126288 A2, 15.10.2009. |

