Область техники
Настоящее изобретение относится к устройству управления для электрической вращающейся машины, такой как асинхронная машина или синхронная машина, которое способно получать информацию о положении ротора без использования датчика углового положения и выполнять управление вращением для электрической вращающейся машины.
Предшествующий уровень техники
Чтобы точно управлять вращением электрической вращающейся машины, необходима информация о положении ротора электрической вращающейся машины и информация о токе, протекающем в электрической вращающейся машине. В данном случае, обычно информацию о положении ротора получают дополнительным присоединением датчика углового положения к вращающейся электрической машине. Однако дополнительное обеспечение датчика углового положения имеет существенный недостаток, с точки зрения снижения затрат, уменьшения занимаемого пространства, повышения надежности. Поэтому потребовался переход от типа с датчиком углового положения к типу без датчика.
Примеры способов управления для перехода электрической вращающейся машины от типа с датчиком угла положения на тип без датчика включают в себя способ оценки положения ротора электрической вращающейся машины, главным образом, по индуктивному напряжению электрической вращающейся машины и способ оценки положения ротора электрической вращающейся машины посредством использования характеристики (зависимости индуктивности от положения) электрической вращающейся машины.
Индуктивное напряжение, которое используется в первом способе, имеет характеристику, состоящую в том, что его величина пропорциональна скорости электрической вращающейся машины. Поэтому при нулевой скорости или низкой скорости индуктивное напряжение уменьшается и ухудшается отношение сигнал-шум. В результате становится трудным точно оценить положение ротора электрической вращающейся машины.
С другой стороны, в последнем способе, который использует эту характеристику, команда по высокочастотному напряжению для оценки положения, имеющая частоту, отличную от частоты приведения в действие электрической вращающейся машины, прикладывается к электрической вращающейся машине, детектируется высокочастотный ток электрической вращающейся машины, протекающий в электрической вращающейся машине, вместе с приложением команды по напряжению для оценки положения, и положение ротора оценивается посредством использования того факта, что величина тока электрической вращающейся машины изменяется в зависимости от положения ротора вследствие указанной характеристики.
Таким образом, способ, использующий эту характеристику, имеет преимущество в том, что положение ротора электрической вращающейся машины может оцениваться вне зависимости от скорости вращения электрической вращающейся машины, хотя команды по напряжению для оценки положения для оценки положения ротора электрической вращающейся машины должны вводиться в электрическую вращающуюся машину. Поэтому особенно при нулевой скорости или низкой скорости используется способ управления без датчика положения, использующий эту характеристику.
Однако в таком способе управления без датчика, использующем указанную характеристику, так как команда по высокочастотному напряжению для оценки положения должна прикладываться к электрической вращающейся машине, вместе с этим приложением возникает шум, и этот шум дает ощущение дискомфорта для человека.
В качестве меры для уменьшения такого чувства дискомфорта из-за шума, происходящего вместе с приложением напряжения для оценки положения к электрической вращающейся машине, обычно предлагаются способ уменьшения величины шума, возникающего от электрической вращающейся машины, посредством уменьшения амплитуды напряжения для оценки положения, приложенного к электрической вращающейся машины, и способ повышения качества звука шума.
В первом способе уменьшения величины шума, происходящего от электрической вращающейся машины, посредством уменьшения амплитуды команды по напряжению для оценки положения, прикладываемой к электрической вращающейся машине, так как амплитуда команды по напряжению для оценки положения является малой, трудно точно оценить положение ротора электрической вращающейся машины.
С другой стороны, в последнем способе повышения качества звука шума, например, как в обычном методе, описанном в выложенной патентной публикации Японии № 2004-343833 (патентная литература 1), частота команды по напряжению для оценки положения, приложенной к электрической вращающейся машине, преднамеренно изменяется случайным образом, так что звук, имеющий конкретную частотную составляющую, не является заметным, тем самым, уменьшается чувство дискомфорта, которое испытывает человек, так как, когда звук, имеющий конкретную частотную составляющую, является заметным среди звуков, которые человек может слышать, и человек ощущает чувство дискомфорта от этого звука.
Краткое изложение существа изобретения
Однако, если частотная составляющая команды по напряжению для оценки положения изменяется случайным образом как в патентной литературе 1, так что звук, имеющий конкретную частотную составляющую не является заметным, вместе с этим также становится случайной частота тока, необходимого для оценки положения ротора электрической вращающейся машины. Поэтому становится трудным детектировать из тока электрической вращающейся машины ток, необходимый для оценки положения ротора. В результате ухудшается точность оценки положения, и в некоторых случаях существует вероятность, что положение не может быть оценено.
Настоящее изобретение было создано для решения вышеупомянутых проблем.
Задачей настоящего изобретения является обеспечение устройства управления для электрической вращающейся машины, которое способно точно оценивать положение ротора электрической вращающейся машины и эффективно уменьшать чувство дискомфорта из-за шума, возникающего вместе с приложением команды по напряжению для оценки положения к электрической вращающейся машине.
Устройство управления для электрической вращающейся машины согласно настоящему изобретению выполняет управление приведением в действие электрической вращающейся машины. Устройство управления содержит средство детектирования тока для детектирования токов электрической вращающейся машины, протекающих в электрической вращающейся машине, средство оценки положения для оценки положения ротора электрической вращающейся машины, на основании тока электрической вращающейся машины, детектированного средством детектирования тока, средство управления для вывода команды по напряжению, на основании тока электрической вращающейся машины, детектированного средством детектирования тока, и информации о положении ротора, оцененном средством оценки положения, и средство приложения напряжения для приложения напряжения для управления приведением в действие к электрической вращающейся машине, на основании команды по напряжению, выводимой из средства управления. Средство управления включает в себя секцию вычисления команды по напряжению приведения в действие для вычисления команды по напряжению приведения в действие для приведения в действие электрической вращающейся машины, генератор напряжения для оценки положения для вывода команд по напряжению для оценки положения для оценки положения ротора электрической вращающейся машины, генератор напряжения для уменьшения шума для вывода команд по напряжению для уменьшения шума, которые не вносят свой вклад в управление приведением в действие и в оценку положения для электрической вращающейся машины, и сумматоры для добавления команд по напряжению для оценки положения и команд по напряжению для уменьшения шума к командам по напряжению приведения в действие и вывода результирующего сигнала в качестве команд по напряжению на средство приложения напряжения.
Согласно настоящему изобретению, когда команды по напряжению для оценки положения для оценки положения о роторе добавляются к командам по напряжению приведения в действие для управления приведением в действие электрической вращающейся машины для вывода на средство приложения напряжения, также добавляются команды по напряжению для уменьшения шума, выводимые от генератора напряжения для уменьшения шума. Поэтому от электрической вращающейся машины возникает шум, включающий в себя множество частотных составляющих. Поэтому шум, происходящий вместе с приложением команд по напряжению для оценки положения к электрической вращающейся машине, может подавляться так, чтобы он не был заметным. В результате может быть уменьшено чувство дискомфорта, которое человек ощущает от шума.
В данном случае частота команды по напряжению для оценки положения не изменяется случайным образом, но устанавливается постоянной. Поэтому становится легко детектировать ток, необходимый для оценки положения ротора электрической вращающейся машины, по сравнению со случаем, когда частота команды по напряжению для оценки положения изменяется случайным образом как при обычном методе. В результате обеспечивается высокая точность оценки положения.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает схему, показывающую конфигурацию устройства управления для электрической вращающейся машины, согласно варианту 1 осуществления настоящего изобретения;
Фиг.2 изображает схему, показывающую конкретный пример конфигурации средства оценки положения устройства управления;
Фиг.3 изображает диаграмму, показывающую формы волны амплитуд тока оценки положения, полученных блоком вычисления амплитуды тока устройства управления;
Фиг.4 изображает диаграмму для иллюстрации работы блока вычисления положения устройства управления;
Фиг.5 изображает диаграмму, показывающую формы волны команд по напряжению для оценки положения, генерируемых генератором напряжения для оценки положения устройства управления;
Фиг.6 изображает схему, показывающую модификацию конфигурации устройства управления для электрической вращающейся машины, согласно варианту 1 осуществления настоящего изобретения;
Фиг.7 изображает схему, показывающую конфигурацию устройства управления для электрической вращающейся машины, согласно варианту 2 осуществления настоящего изобретения;
Фиг.8 изображает диаграмму, показывающую пример формы волны команды по напряжению для уменьшения шума, генерируемой генератором напряжения для уменьшения шума;
Фиг.9 изображает схему, показывающую конкретный пример конфигурации средства приложения напряжения устройства управления;
Фиг.10 изображает диаграмму для иллюстрации работы в случае, когда команды по напряжению, к которым были добавлены команды по напряжению для уменьшения шума, подаются на средство приложения напряжения устройства управления;
Фиг.11 изображает диаграмму для иллюстрации работы в случае, когда команды по напряжению, к которым не добавляются команды по напряжению для уменьшения шума, подаются на средство приложения напряжения устройства управления;
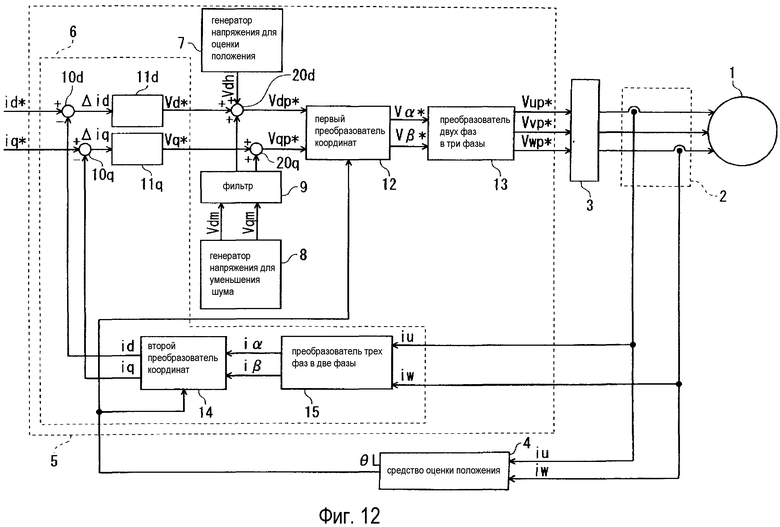
Фиг.12 изображает схему, показывающую конфигурацию устройства управления для электрической вращающейся машины, согласно варианту 3 осуществления настоящего изобретения;
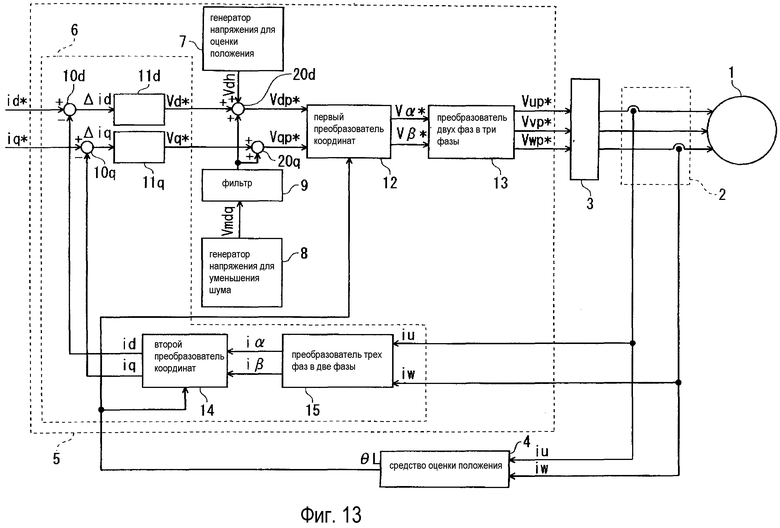
Фиг.13 изображает схему, изображающую конфигурацию устройства управления для электрической вращающейся машины, согласно варианту 4 осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления изобретения
Вариант 1 осуществления
Фиг.1 изображает схему конфигурации устройства управления для электрической вращающейся машины, согласно варианту 1 осуществления настоящего изобретения.
В варианте 1 осуществления электрическая вращающаяся машина 1, например, представляет собой синхронную машину типа со встроенными магнитами. Средство 3 приложения напряжения для приложения заданного напряжения управления подключено к электрической вращающейся машине 1. Кроме того, предусморены: средство 2 детектирования тока для детектирования токов iu и iw электрической вращающейся машины (для двух фаз в настоящем варианте осуществления), протекающих между средством 3 приложения напряжения и электрической вращающейся машиной 1; средство 4 оценки положения для оценки положения θL ротора электрической вращающей машины 1, на основании токов iu и iw электрической вращающейся машины, детектированных средством 2 детектирования тока; и средство 5 управления для вывода команд Vup*, Vvp* и Vwp* по напряжению для управления приведением в действие на средство 3 приложения напряжения.
Средство 2 детектирования тока включает в себя, например, трансформатор тока и т.п. В настоящем варианте осуществления средство 2 детектирования тока детектирует две фазы токов электрической вращающейся машины, т.е. токи iu и iw электрической вращающейся машины U-фазы и W-фазы из числа трех фаз токов электрической вращающейся машины, протекающих между электрической вращающейся машиной 1 и средством 3 приложения напряжения. Отмечается, что ток iv электрической вращающейся машины V-фазы вычисляется посредством использования того факта, что токи электрической вращающейся машины находятся в трехфазном равновесии. Кроме того, хотя в настоящем варианте осуществления детектируются токи iu и iw электрической вращающейся машины U-фазы и W-фазы, настоящее изобретение не огранивается этим. Могут детектироваться токи электрической вращающейся машины любых двух фаз, или могут детектироваться одновременно все токи iu, iv и iw электрической вращающейся машины U-фазы, V-фазы и W-фазы. Альтернативно средство 2 детектирования тока может детектировать ток шины постоянного тока (DC), вводимый в средство 3 приложения напряжения, и вычислять токи электрической вращающейся машины из тока шины DC.
Например, устройство преобразования энергии, такое как инвертор с широтно-импульсной модуляцией (ШИМ-инвертор) со сравнением треугольной волны, применяется в средстве 3 приложения напряжения. Средство 3 приложения напряжения выполняет преобразование энергии, на основании каждой из команд Vup*, Vvp* и Vwp* по напряжению, выводимых от средства 5 управления, и подает напряжение для управления приведением в действие на электрическую вращающуюся машину 1.
В данном случае электрическая вращающаяся машина 1 имеет так называемую характеристику, при которой индуктивность изменяется в соответствии с положением ротора. Поэтому, как описано подробно ниже, когда напряжение прикладывается к электрической вращающейся машине 1 посредством средства 3 приложения напряжения, на основании команд Vup*, Vvp* и Vwp* по напряжению, на которые были наложены команды Vuh, Vvh и Vwh по напряжению для оценки положения трехфазного переменного тока (AC), выводимые из генератора 7 напряжения для оценки положения средства 5 управления, токи iu, iv и iw электрической вращающейся машины, детектированные средством 2 детектирования тока, включают в себя токи (ниже в данном документе упоминаемые как токи для оценки положения) iuh, ivh и iwh, имеющие такие же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения, соответственно, и амплитуды токов iuh, ivh и iwh для оценки положения изменяются в соответствии с положением ротора электрической вращающейся машины 1.
Посредством использования вышеописанной характеристики, сначала средство 4 оценки положения извлекает токи iuh, ivh и iwh для оценки положения, имеющие такие же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения, из токов iu и iw электрической вращающейся машины, детектированных средством 2 детектирования тока. Затем средство 4 оценки положения вычисляет оцененное положение θL ротора (ниже в данном документе так же упоминаемое, как оцененное положение) электрической вращающейся машины 1 на основании амплитуд извлеченных токов iuh, ivh и iwh для оценки положения и выводит положение θL ротора.
Фиг.2 изображает схему конкретного примера конфигурации средства 4 оценки положения.
Средство 4 оценки положения включает в себя сумматор 16, экстракторы 17u, 17v и 17w тока для оценки положения, блоки 18u, 18v и 18w вычисления амплитуды тока и блок 19 вычисления положения.
Из числа трех фаз токов iu, iv и iw электрической вращающейся машины токи iu и iw электрической вращающейся машины U-фазы и W-фазы, которые детектируются средством 2 детектирования тока, имеют зависимость, представленную выражением (1) с током iv электрической вращающейся машины V-фазы, который не детектируется средством 2 детектирования тока. Поэтому сумматор 16 суммирует токи iu и iw электрической вращающейся машины U-фазы и W-фазы, таким образом вычисляя ток iv электрической вращающейся машины V-фазы. Отмечается, что, как правило, в случае, когда средство 2 детектирования тока детектирует одновременно три фазы токов iu, iv и iw электрической вращающейся машины, нет необходимости вычислять ток iv электрической вращающейся машины V-фазы.

Токи iu, iv и iw электрической вращающейся машины, детектированные так, как описано выше, вводятся в экстракторы 17u, 17v и 17w тока для оценки положения соответственно, обеспеченные для токов iu, iv и iw электрической вращающейся машины, и извлекаются токи iuh, ivh и iwh для оценки положения, имеющие такие же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения. В данном случае извлечение токов iuh, ivh и iwh для оценки положения выполняется с использованием полосового фильтра или режекторного фильтра. Отмечается, что токи iu, iv и iw электрической вращающейся машины также включают в себя сигналы, имеющие такие же частотные составляющие, что и составляющие команд Vum, Vvm и Vwm по напряжению для уменьшения шума, описанных ниже, соответственно. Однако частоты этих сигналов отличаются от частот команд Vuh, Vvh и Vwh по напряжению для оценки положения. Поэтому эти сигналы удаляются в экстракторах 17u, 17v и 17w тока для оценки положения, и не возникает никакой проблемы при извлечении токов iuh, ivh и iwh для оценки положения.
Токи iuh, ivh и iwh для оценки положения, извлеченные экстракторами 17u, 17v и 17w тока для оценки положения, как описано выше, вводятся в блоки 18u, 18v и 18w вычисления амплитуды тока, соответственно, обеспечиваемые для токов iuh, ivh и iwh для оценки положения, и вычисляются амплитуды Iuh, Ivh и Iwh тока для оценки положения, которые представляют собой амплитуды токов iuh, ivh и iwh для оценки положения.
Способ вычисления амплитуд Iuh, Ivh и Iwh тока для оценки положения в данном случае конкретно не ограничивается. Например, амплитуды могут вычисляться посредством выполнения преобразования Фурье или основываясь на соответствующих автокорреляциях, полученных посредством возведения в квадрат токов iuh, ivh и iwh для оценки положения, основываясь на выражении (2).
где Tn представляет собой период тока для оценки положения
Затем блок 19 вычисления положения вычисляет оцененное положение θL электрической вращающейся машины 1, основываясь на амплитудах Iuh, Ivh и Iwh тока для оценки положения, вычисленных соответствующими блоками 18u, 18v и 18w вычисления амплитуды тока. Подробности способа вычисления приведены ниже. Отмечается, что вычисление блоком 19 вычисления положения не ограничивается описанным ниже способом, и может применяться любой способ до тех пор, пока оцененное положение θL вычисляется на основе амплитуд Iuh, Ivh и Iwh тока для оценки положения.
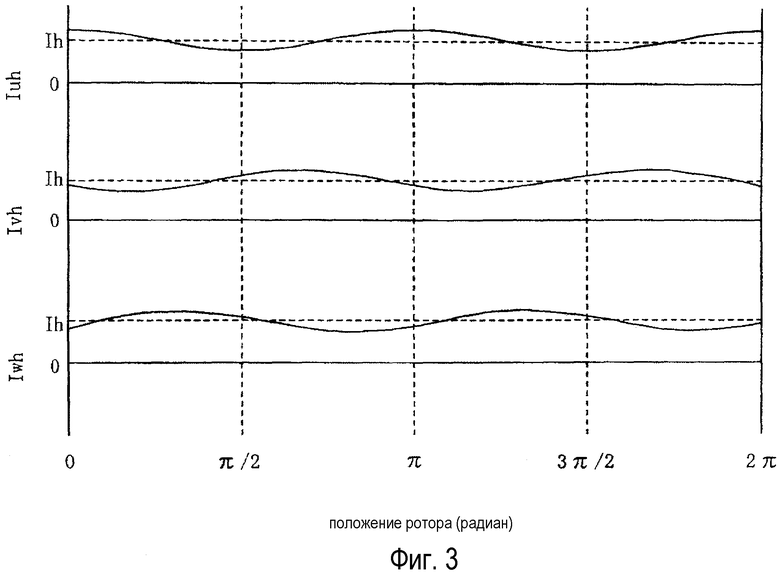
Как показано на фиг.3, смещение Ih было наложено на каждую амплитуду Iuh, Ivh и Iwh тока для оценки положения, полученную блоками 18u, 18v и 18w вычисления амплитуды тока, и амплитуды Iuh, Ivh и Iwh тока для оценки положения изменяются с 1/2 периода положения (фазы) электрической вращающейся машины 1.
Поэтому, как показано выражением (3), сначала блок 19 вычисления положения вычитает смещение Ih из каждой амплитуды Iuh, Ivh и Iwh тока для оценки положения, таким образом вычисляя сигналы dIu, dIv и dIw вычисления положения. В данном случае, так как амплитуды Iuh, Ivh и Iwh тока для оценки положения находятся в трехфазном равновесии, смещение Ih может вычисляться так, как показано выражением (4).

В данном случае оцененное положение θL электрической вращающейся машины 1 может вычисляться посредством выполнения операции арккосинуса для одного из сигналов dIu, dIv и dIw вычисления положения, показанных в выражении (3). Однако необходимо выполнить операцию арккосинуса и сохранить заранее функцию арккосинуса, что приводит к увеличению количества вычислений и объема памяти. Поэтому данный способ не является предпочтительным. Вариант 1 осуществления применяет способ вычисления оцененного положения θL электрической вращающейся машины 1 посредством использования линейной аппроксимации без использования функции арккосинуса. Ниже в данном документе описывается данный способ.
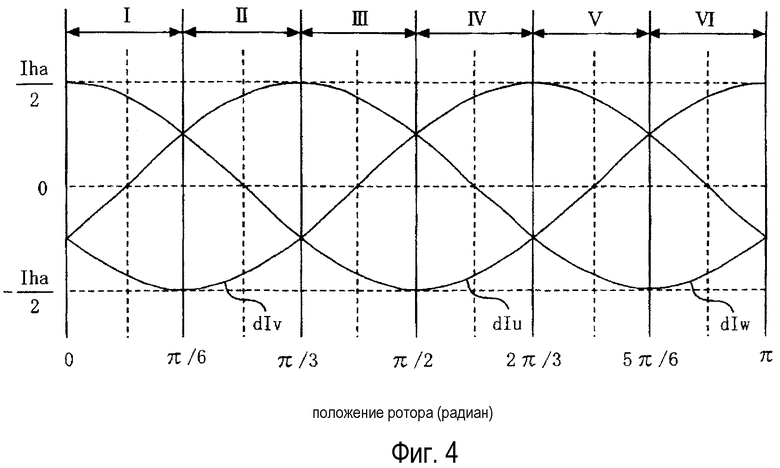
В блоке 19 вычисления положения, на основании взаимозависимости между сигналами dIu, dIv и dIw вычисления положения, вычисленными выражением (3), сигналы dIu, dIv и dIw вычисления положения делятся на шесть интервалов (I-VI), средние положения θM которых представлены выражением (5), как показано на фиг.4.

В каждом интервале (I-VI) один из сигналов dIu, dIv и dIw вычисления положения, который пересекает ноль в середине интервала, представлен функцией sin или -sin. Так как функция sin или -sin в каждом интервале (I-VI) рассматривается в виде прямой линии, сигнал в каждом интервале (I-VI) подвергается линейной аппроксимации, и отклонение ΔθML между средним положением θM каждого интервала (I-VI) и оцененным положением θL электрической вращающейся машины 1 (= положению θ электрической вращающейся машины 1) вычисляется на основе выражения (6). В данном случае dI_uvw в выражении (6) представляет собой значение на вертикальной оси каждого сигнала dIu, dIv и dIw вычисления положения в данной ситуации, когда сигнал пересекает ноль в среднем положении θM в каждом интервале (I-VI). Кроме того, так как Iha представляет собой величину изменения каждого тока iuh, ivh и iwh для оценки положения в соответствии с положением электрической вращающейся машины, (Iha/2) представляет собой амплитуду каждого сигнала dIu, dIv и dIw вычисления положения.

Отмечается, что (Iha/2) может вычисляться из квадратного корня суммы квадратов сигналов dIu, dIv и dIw вычисления положения, как показано выражением (7).

Затем, как показано выражением (8), суммируются ΔθML, вычисленное выражением (6), и среднее положение θM, посредством чего вычисляется оцененное положение θL электрической вращающейся машины 1.

Средство 5 управления включает в себя секцию 6 вычисления команды по напряжению приведения в действие, генератор 7 напряжения для оценки положения, генератор 8 напряжения для уменьшения шума, фильтр 9 и сумматоры 20u, 20v и 20w.
Сумматоры 20u, 20v и 20w добавляют к командам Vu*, Vv* и Vw* по напряжению приведения в действие, выводимым из секции 6 вычисления команды по напряжению приведения в действие, команды Vuh, Vvh и Vwh по напряжению для оценки положения, выводимые из генератора 7 напряжения для оценки положения, и команды Vum, Vvm и Vwm по напряжению для уменьшения шума, выводимые от генератора 8 напряжения для уменьшения шума, при помощи фильтра 9 соответственно, и результирующие сигналы выводятся в качестве команд Vup*, Vvp* и Vwp* по напряжению на средство 3 приложения напряжения.
Поэтому команды Vup*, Vvp* и Vwp* по напряжению, которые подаются на средство 3 приложения напряжения, представляют собой команды Vu*, Vv* и Vw* по напряжению приведения в действие, на которые наложены соответственно команды Vuh, Vvh и Vwh по напряжению для оценки положения и команды Vum, Vvm и Vwm по напряжению для уменьшения шума. Отмечается, что команды Vuh, Vvh и Vwh по напряжению для оценки положения и команды Vum, Vvm и Vwm по напряжению для уменьшения шума подробно описаны ниже.
Секция 6 вычисления команды напряжения приведения в действие включает в себя два вычитателя 10d и 10q, контроллер 11d тока d-оси, контроллер 11q тока q-оси, первый преобразователь 12 координат, преобразователь 13 двух фаз в три фазы, второй преобразователь 14 координат и преобразователь 15 трех фаз в две фазы.
Вычитатель 10d, который представляет собой один из вычитателей, вычисляет отклонение Δid между командой id* по току d-оси для приведения в действие электрической вращающейся машины 1, которая задается вне средства 5 управления, и током id от второго преобразователя 14 координат. Контроллер 11d тока d-оси выполняет пропорционально интегральное регулирование (ПИ-регулирование), так что отклонение Δid становится равным нулю, тем самым, вычисляя команду Vd* по напряжению d-оси.
Вычитатель 10q, который является другим одним из вычитателей, вычисляет отклонение Δiq между командой iq* по току q-оси для приведения в действие электрической вращающейся машины 1, который задается вне средства 5 управления, и током iq, выводимым со второго преобразователя 14 координат. Контроллер 11q тока q-оси выполняет пропорционально-интегральное регулирование (ПИ-регулирование), так что отклонение Δiq становится равным нулю, таким образом вычисляя команду Vq* по напряжению q-оси.
Первый преобразователь 12 координат преобразует команду Vd* по току d-оси и команду Vq* по току q-оси, выводимые от контроллера 11d тока d-оси и контроллера 11q тока q-оси, в команды Vα* и Vβ* по напряжению по двум осям (оси α-β) в состоянии покоя соответственно. Преобразователь 13 двух фаз в три фазы преобразует команды Vα* и Vβ* по напряжению, выводимые из первого преобразователя 12 координат, в команды Vu*, Vv* и Vw* по напряжению приведения в действие в системе координат трехфазного переменного тока.
Преобразователь 15 трех фаз в две фазы преобразует токи iu и iw электрической вращающейся машины, детектированные средством 2 детектирования тока, в токи iα и iβ по двум осям (оси α-β) в состоянии покоя. Второй преобразователь 14 координат преобразует токи iα и iβ, выводимые из преобразователя 15 трех фаз в две фазы, в токи id и iq по двум осям вращения (оси d-q), вращающимся синхронно с оцененным положением θL, выводимым из ранее описанного средства 4 оценки положения, и выводит токи id и iq на вычитатели 10d и 10q соответственно.
Генератор 7 напряжения для оценки положения генерирует для оценки положения ротора электрической вращающейся машины 1 команды Vuh, Vvh и Vwh по напряжению для оценки положения, имеющие частоты, отличающиеся от частот команд Vu*, Vv* и Vw* по напряжению приведения в действие, выводимых из секции 6 вычисления команды по напряжению приведения в действие. Команды Vuh, Vvh и Vwh по напряжению для оценки положения могут быть любого типа, пока их частоты отличаются от частот команд Vu*, Vv* и Vw* по напряжению приведения в действие. В варианте 1 осуществления команды Vuh, Vvh и Vwh по напряжению для оценки положения представляют собой команды по напряжению трехфазного переменного тока для оценки положения.
Команды Vuh, Vvh и Vwh по напряжению трехфазного переменного тока для оценки положения, например, показаны на фиг.5. В том случае, когда средство 3 приложения напряжения представляет собой ШИМ-инвертор со сравнением треугольной волны, если полупериод Tc несущей треугольной волны, используемой для ШИМ-инвертора со сравнением треугольной волны для выполнения ШИМ-модуляции, представляет собой один интервал, команды по напряжению для оценки положения трехфазного AC представляют собой сигналы, один период которых имеет продолжительность в шесть интервалов (=6*Tc), где один период равен Th. Кроме того, команды Vuh, Vvh и Vwh по напряжению для оценки положения устанавливаются так, что каждая из них смещается на два интервала (=2*Tc) друг от друга, так что они находятся в трехфазном равновесии. Таким образом, если команды Vuh, Vvh и Vwh по напряжению для оценки положения представляют собой команды по напряжению трехфазного переменного тока для оценки положения, становится легко сделать шаблон, как показано на фиг.5. В результате может быть упрощена конфигурация генератора 7 напряжения для оценки положения.
Когда команды Vuh, Vvh и Vwh по напряжению для оценки положения, выводимые из генератора 7 напряжения для оценки положения, прикладываются к электрической вращающейся машине 1 средством 3 приложения напряжения, возникает шум от электрической вращающейся машины 1 вместе с этим приложением, и человек ощущает чувство дискомфорта от шума. Поэтому генератор 8 напряжения для уменьшения шума выводит три фазы команд Vum, Vvm и Vwm по напряжению для уменьшения шума, чтобы уменьшить такое чувство дискомфорта. Ниже в данном документе описываются подробности команд Vum, Vvm и Vwm по напряжению для уменьшения шума.
Среди шумов, которые человек может слышать, при сравнении шума, имеющего одну частотную составляющую, и шума, имеющего множество частотных составляющих, существует особенность, что человек ощущает большее чувство дискомфорта от шума, имеющего одну частотную составляющую. Поэтому в варианте 1 осуществления генератор 8 напряжения для уменьшения шума генерирует три фазы команд Vum, Vvm и Vwm по напряжению для уменьшения шума, имеющих частоты, отличающиеся от частот команд Vu*, Vv* и Vw* по напряжению приведения в действие и от частот команд Vuh, Vvh и Vwh по напряжению для оценки положения, и сумматоры 20u, 20v и 20w добавляют команды Vum, Vvm и Vwm по напряжению для уменьшения шума к командам Vu*, Vv* и Vw* по напряжению приведения в действие и командам Vuh, Vvh и Vwh по напряжению для оценки положения соответственно. Тогда средство 3 приложения напряжения прикладывает к электрической вращающейся машине 1 напряжения для управления приведением в действие, основываясь на командах Vup*, Vvp* и Vwp* по напряжению, полученных добавлением.
В результате шум, происходящий от электрической вращающейся машины 1, включает в себя частотную составляющую, основанную на командах Vuh, Vvh и Vwh по напряжению для оценки положения, и частотную составляющую, основанную на командах Vum, Vvm и Vwm по напряжению для уменьшения шума, смешанным образом. Поэтому может быть уменьшено чувство дискомфорта, которое ощущает человек, по сравнению со случае, когда шум имеет одну частотную составляющую.
Особенно предпочтительно, что частоты команд Vum, Vvm и Vwm по напряжению для уменьшения шума устанавливаются для изменения во времени вместо установки частот с постоянными значениями, так как в данном случае частоты команд Vum, Vvm и Vwm по напряжению для уменьшения шума включают в себя различные частоты, и может быть дополнительно уменьшено чувство дискомфорта из-за шума, происходящего от электрической вращающейся машины 1.
Например, если каждая команда Vum, Vvm и Vwm по напряжению для уменьшения помех устанавливается как волна с частотной модуляцией (ЧМ), представленная выражением (9), в котором амплитуда равна Af, центральная частота равна ωn, и фаза изменяется как mf*sin(ωn*t), частоты команд Vum, Vvm и Vwm по напряжению для уменьшения шума изменяются во времени. В результате шум, возникающий от электрической вращающейся машины 1, изменяется во времени по частоте, посредством чего в шум включаются различные частоты. Поэтому может быть дополнительно уменьшено чувство дискомфорта, которое человек ощущает от шума.

Фильтр 9, обеспечиваемый между генератором 8 напряжения для уменьшения шума и сумматорами 20u, 20v и 20w, удаляет те же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения и частотные составляющие в их окрестности, так что такие частотные составляющие не включаются в команды Vum, Vvm и Vwm по напряжению для уменьшения шума. Например, для фильтра 9 применяется режекторный фильтр.
Например, в том случае, когда команды Vum, Vvm и Vwm по напряжению для уменьшения шума представляют собой волны с ЧМ-модуляцией, представленные выражением (9), если полоса частот волны с ЧМ-модуляцией частично перекрывается частотами команд Vuh, Vvh и Vwh по напряжению для оценки положения, команды Vum, Vvm и Vwm по напряжению для уменьшения шума могут иметь неблагоприятное влияние на команды Vuh, Vvh и Vwh по напряжению для оценки положения, и может ухудшаться точность оценки положения. Особенно, когда частотные составляющие, включенные в команды Vum, Vvm и Vwm по напряжению для уменьшения шума, представляют собой те же частоты, что и частоты команд Vuh, Vvh и Vwh по напряжению для оценки положения, и фазы частотных составляющих противоположны фазам команд Vuh, Vvh и Vwh по напряжению для оценки положения, команды Vum, Vvm и Vwm по напряжению для уменьшения помех нейтрализуют команды Vuh, Vvh и Vwh по напряжению для оценки положения. Тогда уровни сигнала команд Vuh, Vvh и Vwh по напряжению для оценки положения становятся малыми или равными нулю, и существует проблема в том, что ухудшается точность оценки положения.
Поэтому фильтр 9 удаляет те же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения и частотные составляющие в их окрестности, так что такие частотные составляющие не включаются в команды Vum, Vvm и Vwm по напряжению для уменьшения шума, тем самым, предотвращая ухудшение точности оценки положения.
Отмечается, что, если нет возможности, что такие же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения или частотные составляющие в их окрестности, включаются в команды Vum, Vvm и Vwm по напряжению для уменьшения шума, фильтр 9 может быть исключен, как показано на фиг.6.
Как описано выше, в варианте 1 осуществления, когда команды Vuh, Vvh и Vwh по напряжению для оценки положения прикладываются к электрической вращающейся машине 1 для реализации изменения типа с датчиком углового положения на тип без датчика, добавляются одновременно команды Vum, Vvm и Vwm по напряжению для уменьшения шума, имеющие частотные составляющие, отличающиеся от составляющих команд Vuh, Vvh и Vwh по напряжению для оценки положения. Поэтому шум, возникающий от электрической вращающейся машины 1, включает в себя частотные составляющие, отличные от составляющих команд Vuh, Vvh и Vwh по напряжению для оценки положения, и может быть уменьшено чувство дискомфорта, которое человек ощущает, по сравнению со случаем, когда шум имеет единственную частотную составляющую.
Кроме того, частоты команд Vuh, Vvh и Vwh по напряжению для оценки положения всегда являются постоянными, хотя шум включает в себя множество частотных составляющих смешанным образом. Поэтому, по сравнению со случаем, когда частоты команд Vuh, Vvh и Vwh по напряжению для оценки положения изменяются случайным образом как в обычном методе, токи iuh, ivh и iwh оценки положения могут точно извлекаться из токов электрической вращающейся машины, и, в результате, обеспечивается высокая точность оценки положения.
Кроме того, так как фильтр 9 заранее удаляет те же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения, и частотные составляющие в их окрестности, так что такие частотные составляющие не включаются в команды Vum, Vvm и Vwm по напряжению для уменьшения шума, можно предотвратить, чтобы команды Vum, Vvm и Vwm по напряжению для уменьшения шума имели неблагоприятное влияние на команды Vuh, Vvh и Vwh по напряжению для оценки положения.
Вариант 2 осуществления
Фиг.7 представляет собой схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 2 осуществления настоящего изобретения. Компоненты, которые соответствуют или аналогичны компонентам варианта 1 осуществления, показанного на фиг.1, обозначены одинаковыми позициями. Отмечается, что на фиг.7 конфигурации, за исключением конфигураций генератора 8 напряжения для уменьшения шума средства 5 управления, те же, что и в варианте 1 осуществления. Поэтому здесь опускается описание конфигураций за исключением конфигураций генератора 8 напряжения для уменьшения шума.
В варианте 1 осуществления генератор 8 напряжения для уменьшения шума генерирует три фазы команд Vum, Vvm и Vwm по напряжению для уменьшения шума, тогда как в варианте 2 осуществления генератор 8 напряжения для уменьшения шума генерирует одну команду Vm по напряжению для уменьшения шума, включающую в себя волну с ЧМ-модуляцией, частота которой изменяется во времени, или волну с амплитудной модуляцией (АМ-модуляцией), амплитуда которой изменяется во времени, и команда Vm по напряжению для уменьшения шума, которая прошла фильтр 9, делится на три сигнала для подачи на соответствующие сумматоры 20u, 20v и 20w.
Т.е. в варианте 2 осуществления команда Vm по напряжению для уменьшения шума, генерируемая генератором 8 напряжения для уменьшения шума, представляет собой волну с ЧМ-модуляцией, частота которой изменяется во времени, как представлено выражением (9), волну с АМ-модуляцией, представленную выражением (10), в котором угловой частотой является ωb, и амплитуда изменяется во времени как (Aa1+Aa2*sinωat), или волну с АМ-модуляцией, амплитуда которой изменяется периодически ступенчатым образом, как показано на фиг.8.

В данном случае, если идентичная команда Vm по напряжению для уменьшения шума накладывается на команды Vup*, Vvp* и Vwp* по напряжению U-фазы, V-фазы и W-фазы, не изменяются линейные напряжения среди команд Vup*, Vvp* и Vwp* по напряжению U-фазы, V-фазы и W-фазы. Поэтому может показаться, что любой звук, имеющий такую же частотную составляющую, что и составляющая команды Vm по напряжению для уменьшения шума, не происходит от электрической вращающейся машины 1.
Однако, если средство 3 приложения напряжения включает в себя ШИМ-инвертор со сравнением несущей, напряжение управления приведением в действие, подвергаемое ШИМ-модуляции на основе результирующего значения, полученного посредством сравнения между треугольной или пилообразной волной несущей и команд Vup*, Vvp* и Vwp* по напряжению, введенных в средство 3 приложения напряжения, выводится на электрическую вращающуюся машину 1. Поэтому, если команда Vum по напряжению для уменьшения шума, включающая в себя волну с ЧМ-модуляцией, частота которой изменяется во времени, или волну с АМ-модуляцией, амплитуда которой изменяется во времени, накладывается на команды Vup*, Vvp* и Vwp* по напряжению, как описано выше, изменяются моменты переключения включения/выключения каждого переключающего устройства, включенного в ШИМ-инвертор со сравнением несущей. Благодаря изменению момента переключения, от электрической вращающейся машины 1 возникает шум, включающий в себя множество частотных составляющих. Таким образом, шум, возникающий вместе с приложением команд Vuh, Vvh и Vwh по напряжению для оценки положения, может подавляться так, чтобы он не был заметным, и в результате может уменьшаться чувство дискомфорта, которое ощущает человек от шума. Ниже в данном документе описываются его подробности.
Фиг.9 представляет собой схему, изображающую конфигурацию средства 3 приложения напряжения, функционирующего в качестве ШИМ-инвертора со сравнением несущей.
Средство 3 приложения напряжения включает в себя секцию 23 вычисления сигнала переключения, секцию 24 преобразования энергии и сглаживающий конденсатор 25.
В данном случае, секция 23 вычисления сигнала переключения включает в себя один генератор 27 сигнала несущей и компараторы 28u, 28v и 28w для трех фаз. Генератор 27 сигнала несущей генерирует сигнал Sc несущей, такой как треугольная волна или пилообразная волна.
Кроме того, компараторы 28u, 28v и 28w сравнивают сигнал Sc несущей, выводимый из генератора 27 сигнала несущей, с командами Vup*, Vvp* и Vwp* по напряжению, выводимыми из средства 5 управления соответственно, и выводят сигналы Sup, Sun, Svp, Svn, Swp и Swn переключения для включения/выключения соответствующих переключающих устройств 26 секции 24 преобразования энергии. Например, компараторы 28u, 28v и 28w сравнивают сигнал Sc несущей треугольной волны с командами Vup*, Vvp* и Vwp* по напряжению соответственно. Затем, если уровень каждой команды Vup*, Vvp* и Vwp* по напряжению больше уровня сигнала Sc несущей, каждый компаратор 28u, 28v и 28w выводит сигнал переключения, который включает соответствующее переключающее устройство 26, и, если уровень каждой команды Vup*, Vvp* и Vwp* по напряжению меньше уровня сигнала Sc несущей, каждый компаратор 28u, 28v и 28w выводит сигнал переключения, который выключает соответствующее переключающее устройство 26.
Секция 24 преобразования энергии включает в себя шесть переключающих устройств 26 (UP, UN, VP, VN, WP и WN), которые представляют собой полупроводниковые переключатели, такие как, например, биполярные транзисторы с изолированным затвором (IGBT). Шесть переключающих устройств 26 включаются/выключаются соответствующими переключающими сигналами Sup, Sun, Svp, Svn, Swp и Swn, подаваемыми секцией 23 вычисления сигнала переключения, посредством чего секция 24 преобразования энергии преобразует напряжение Vdc постоянного тока (DC), подаваемое внешним источником напряжения DC средства 3 приложения напряжения, в напряжение переменного тока (AC) и прикладывает напряжение AC к электрической вращающейся машине 1.
Фиг.10 представляет собой временную диаграмму формы волны, схематически изображающую зависимость между командами Vup*, Vvp* и Vwp* по напряжению, сигналом Sc несущей треугольной волны и тремя переключающими сигналами Sup, Svp и Swp в случае, когда команда Vm по напряжению для уменьшения шума, включающая в себя волну с амплитудной (АМ) модуляцией, амплитуда которой изменяется периодически ступенчатым образом, как показано на фиг.8, была добавлена к командам Vup*, Vvp* и Vwp* по напряжению. Фиг.11 представляет собой временную диаграмму формы волны, схематически изображающую зависимость между командами Vup*, Vvp* и Vwp* по напряжению, сигналом Sc несущей треугольной волны и тремя переключающими сигналами Sup, Svp и Swp в случае, когда команда Vm по напряжению для уменьшения шума, как показано на фиг.8, не добавляется к командам Vup*, Vvp* и Vwp* по напряжению.
Отмечается, что на фиг.10 и 11, хотя команды Vup*, Vvp* и Vwp* по напряжению фактически представляют собой сигналы синусоидальной волны, они представлены линейным образом, так как их частоты меньше, чем частота сигнала Sc несущей и команды Vm по напряжению для уменьшения шума. Кроме того, хотя команды Vuh, Vvh и Vwh по напряжению для оценки положения были наложены на команды Vup*, Vvp* и Vwp* по напряжению, команды Vuh, Vvh и Vwh по напряжению для оценки положения не показаны на чертежах, так как в данном случае описывается, главным образом, действие моментов переключения переключающих устройств 26.
В том случае, когда команды Vup*, Vvp* и Vwp* по напряжению, к которым не добавляется команда Vm по напряжению для уменьшения шума, подаются на соответствующие переключающие устройства 26, все моменты переключения переключающих устройств 26 в интервале А соответственно те же самые, что и в интервале B, как показано на фиг.11.
С другой стороны, в том случае, когда команды Vup*, Vvp* и Vwp* по напряжению, к которым была добавлена команда Vm по напряжению для уменьшения шума, подаются на соответствующие переключающие устройства 26, линейные напряжения являются постоянными, но моменты переключения переключающих устройств 26 в интервале А отличаются от моментов в интервале В, что очевидно из фиг.10.
Как описано выше, в том случае, когда была добавлена команда Vm по напряжению для уменьшения шума, включающая в себя волну с АМ-модуляцией, амплитуда которой изменяется во времени, или волну с АМ-модуляцией, амплитуда которой изменяется во времени ступенчатым образом, изменяются моменты переключения включения/выключения переключающих устройств 26. Тогда, благодаря изменению моментов переключения, от электрической вращающейся машины 1 возникает шум, включающий в себя множество частотных составляющих. Таким образом, шум, возникающий вместе с приложением команд Vuh, Vvh и Vwh по напряжению для оценки положения, подавляется так, чтобы он не был заметен, и в результате может быть уменьшено чувство дискомфорта, которое человек ощущает от шума.
Кроме того, как и в варианте 1 осуществления, так как фильтр 9 заранее удаляет те же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения, и частотные составляющие в их окрестности, так что такие частотные составляющие не включаются в команду Vm по напряжению для уменьшения шума, можно предотвратить, чтобы команда Vm по напряжению для уменьшения шума имела неблагоприятное влияние на команды Vuh, Vvh и Vwh по напряжению для оценки положения. Отмечается, что, если те же частотные составляющие, что и составляющие команд Vuh, Vvh и Vwh по напряжению для оценки положения, или частотные составляющие в их окрестности не включаются в команду Vm по напряжению для уменьшения шума, фильтр 9 может быть исключен.
Как описано выше, в варианте 2 осуществления, так как приведение в действие электрической вращающейся машины 1 осуществляется командами Vup*, Vvp* и Vwp* по напряжению, к которым была добавлена одна команда Vm по напряжению для уменьшения шума, включающая в себя волну с АМ-модуляцией, амплитуда которой изменяется во времени, или волну с АМ-модуляцией, амплитуда которой изменяется во времени ступенчатым образом, изменяются моменты переключения переключающих устройств 26, включенных в средство 3 приложения напряжения, и, благодаря изменению, от электрической вращающейся машины 1 происходит шум, включающий в себя множество частотных составляющих. Поэтому шум, происходящий вместе с приложением команд Vuh, Vvh и Vwh по напряжению для оценки положения, может подавляться так, чтобы он не был заметным, и в результате может быть уменьшено чувство дискомфорта, которое человек ощущает от шума.
Кроме того, в варианте 1 осуществления, так как добавлены три фазы команд Vum, Vvm и Vwm по напряжению для уменьшения шума, токи электрической вращающейся машины, имеющие те же частотные составляющие, что и составляющие команд Vum, Vvm и Vwm по напряжению для уменьшения шума, протекают в электрической вращающейся машине 1, и токи электрической вращающейся машины становятся потерями. С другой стороны, в варианте 2 осуществления, так как одна команда Vm по напряжению для уменьшения шума обычно применяется для трех фаз, линейные напряжения не изменяются в результате добавления команды Vm по напряжению для уменьшения шума. Поэтому ток электрической вращающейся машины, имеющий ту же частотную составляющую, что и составляющая команды Vm по напряжению для уменьшения шума, не протекает в электрической вращающейся машине 1. Поэтому может быть упрощена конфигурация генератора 8 напряжения для уменьшения шума, и может быть предотвращено присутствие потерь из-за добавления команды Vm по напряжению для уменьшения шума.
Вариант 3 осуществления
Фиг.12 представляет собой схему конфигурации устройства управления электрической вращающейся машины согласно варианту 3 осуществления настоящего изобретения. Компоненты, которые соответствуют или аналогичны компонентам в варианте 1 осуществления, показанном на фиг.1, обозначены одинаковыми позициями. Отмечается, что на фиг.12 конфигурации за исключением конфигурации средства 4 оценки положения и средства 5 управления, являются такими же, что и в варианте 1 осуществления. Поэтому в данном случае опускается описание конфигураций кроме конфигураций средства 4 оценки положения и средства 5 управления.
Средство 5 управления включает в себя секцию 6 вычисления команды по напряжению приведения в действие, генератор 7 напряжения для оценки положения, генератор 8 напряжения для уменьшения шума, фильтр 9, первый преобразователь 12 координат и преобразователь 13 двух фаз в три фазы.
Секция 6 вычисления команды по напряжению приведения в действие включает в себя два вычитателя 10d и 10q, контроллер 11d тока d-оси, контроллер 11q тока q-оси, второй преобразователь 14 координат и преобразователь 15 трех фаз в две фазы. В секции 6 вычисления команды по напряжению приведения в действие конфигурации двух вычитателей 10d и 10q, контроллера 11d тока d-оси, контроллера 11q тока q-оси, второго преобразователя 14 координат и преобразователя 15 трех фаз в две фазы являются теми же самыми, что и в варианте 1 осуществления. Поэтому их описание здесь опускается.
В вариантах 1 и 2 осуществления, чтобы выполнить оценку положения ротора электрической вращающейся машины 1, генератор 7 напряжения для оценки положения генерирует команды Vuh, Vvh и Vwh по напряжению для оценки положения трехфазного AC, тогда как в варианте 3 осуществления генератор 7 напряжения для оценки положения генерирует команду Vdh по напряжению для оценки положения, которая представляет собой переменное напряжение и которая имеет частоту, отличную от частоты команды Vd* по напряжению приведения в действие, выводимой из секции 6 вычисления команды по напряжению приведения в действие.
В данном случае, команда Vdh по напряжению для оценки положения может быть любого типа, пока ее частота отличается от частоты команды Vd* по напряжению приведения в действие. В варианте 3 осуществления команда Vdh по напряжению для оценки положения, которая представляет собой переменное напряжение, добавляется только к команде Vd* по напряжению d-оси среди команды Vd* по напряжению d-оси и команды Vq* по напряжению q-оси. В результате могут подавляться пульсации крутящего момента, происходящие тогда, когда команда Vdh по напряжению для оценки положения прикладывается к электрической вращающейся машины 1, что является полезным.
Генератор 8 напряжения для уменьшения шума выводит, например, две фазы команд Vdm и Vqm по напряжению для уменьшения шума, такие как волна с ЧМ-модуляцией, представленная выражением (9), аналогично генератору 8 напряжения для уменьшения шума варианта 1 осуществления. Затем фильтр 9 заранее удаляет частотные составляющие, включенные в команды Vdm и Vqm по напряжению для уменьшения шума, которые являются теми же, что и составляющие команды Vdh по напряжению для оценки положения, и частотные составляющие в их окрестностях, и результирующие команды Vdm и Vqm по напряжению для уменьшения шума подаются на сумматоры 20d и 20q. Отмечается, что, если те же частотные составляющие, что и составляющие команды Vdh по напряжению для оценки положения, или частотные составляющие в их окрестностях, не включаются в команды Vdm и Vqm по напряжению для уменьшения шума, выводимые из генератора 8 напряжения для уменьшения шума, фильтр 9 может опускаться.
Сумматор 20d, которым является один из сумматоров 20d и 20q, добавляет команду Vdh по напряжению для оценки положения и команду Vdm по напряжению для оценки положения, которая прошла фильтр 9, к команде Vd* по напряжению d-оси, выводимой из секции 6 вычисления команды по напряжению приведения в действие, и выводит результирующую команду в качестве команды Vdp* по напряжению на первый преобразователь 12 координат. Кроме того, сумматор 20d, которым является другой один из сумматоров 20d и 20q, добавляет команду Vqm по напряжению для уменьшения шума, которая прошла фильтр 9, к команде Vq* по напряжению q-оси, выводимой из секции 6 вычисления команды по напряжению приведения в действие, и выводит результирующую команду в качестве команды Vqp* по напряжению на первый преобразователь 12 координат.
Первый преобразователь 12 координат преобразует команды Vdp* и Vqp* по напряжению, выводимые из сумматоров 20d и 20q, в команды Vα* и Vβ* по напряжению по двум осям (оси α-β) в состоянии покоя соответственно. Потом преобразователь 13 двух фаз в три фазы преобразует команды Vα* и Vβ* по напряжению, выводимые из первого преобразователя 12 координат, в команды Vup*, Vvp* и Vwp* по напряжению в системе координат трехфазного переменного тока. Затем средство 3 приложения напряжения прикладывает к электрической вращающейся машине 1 напряжения для управления приведением в действие, основываясь на командах Vup*, Vvp* и Vwp* по напряжению.
В результате шум, возникающий от электрической вращающейся машины 1, включает в себя частотные составляющие, основанные на команде Vdh по напряжению для оценки положения, и частотные составляющие, основанные на командах Vdm и Vqm по напряжению для уменьшения шума смешанным образом. Поэтому может быть уменьшено чувство дискомфорта, которое ощущает человек, по сравнению со случаем, когда шум имеет единственную частотную составляющую.
Средство 4 оценки положения извлекает токи, имеющие те же частотные составляющие, что и составляющие команды Vdh по напряжению для оценки положения, которая представляет собой переменное напряжение, выводимое из генератора 7 напряжения для оценки положения, из токов iu и iw электрической вращающейся машины, детектируемых средством 2 детектирования тока, и выводит оцененное положение θL, основываясь на извлеченных токах, посредством использования, например, известного метода, описанного в публикации № 3312472 патента или публикации № 3707528 патента.
В данном случае частота команды Vdh по напряжению для оценки положения, которая представляет собой переменное напряжение, отличается от частоты команды Vd* по напряжению d-оси. Кроме того, те же частотные составляющие, что и составляющие команды Vdh по напряжению для оценки положения, и частотные составляющие в их окрестности заранее удаляются фильтром 9 из команд Vdm и Vqm по напряжению для уменьшения шума, которые добавляются сумматорами 20d и 20q. Поэтому не ухудшается точность оцененного положения θL, выводимого из средства 4 оценки положения.
Как описано выше, в варианте 3 осуществления, когда генератор 7 напряжения для оценки положения выводит команду Vdh по напряжению для оценки положения, которая представляет собой переменное напряжение, генератор 8 напряжения для уменьшения шума одновременно выводит команды Vdm и Vqm по напряжению для уменьшения шума, и сумматоры 20d и 20q генерируют команды Vdp* и Vqp* по напряжению, к которым добавлены команды Vdm и Vqm по напряжению для уменьшения шума, как и в вариантах 1 и 2 осуществления. Поэтому шум, возникающий от электрической вращающейся машины 1, также включает в себя шум, возникающий вместе с добавлением команд Vdm и Vqm по напряжению для уменьшения шума, в дополнение к шуму, возникающему вместе с приложением команды Vdh по напряжению для оценки положения. В результате не является заметным шум из-за команды Vdh по напряжению для оценки положения, и может быть уменьшено чувство дискомфорта, которое человек ощущает от шума.
Вариант 4 осуществления
Фиг.13 представляет собой схему, изображающую конфигурацию устройства управления для электрической вращающейся машины, согласно варианту 4 осуществления настоящего изобретения. Компоненты, которые соответствуют или аналогичны компонентам в варианте 3 осуществления, показанном на фиг.12, обозначаются одинаковыми позициями. Отмечается, что на фиг.13 конфигурации, кроме конфигурации генератора 8 напряжения для уменьшения шума средства 5 управления, те же самые, что и в варианте 3 осуществления. Поэтому здесь опускается описание конфигураций кроме конфигурации генератора 8 напряжения для уменьшения шума.
В варианте 3 осуществления генератор 8 напряжения для уменьшения шума генерирует две фазы команд Vdm и Vqm по напряжению для уменьшения шума, тогда как в варианте 4 осуществления генератор 8 напряжения для уменьшения шума генерирует одну команду Vmdq по напряжению для уменьшения шума, включающую в себя волну с ЧМ-модуляцией, частота которой изменяется во времени так, как представлено выражением (9), или волну с АМ-модуляцией, амплитуда которой изменяется во времени так, как представлено выражением (10), как в варианте 2 осуществления.
Команда Vmdq по напряжению для уменьшения шума вводится в фильтр 9, посредством чего заранее удаляются та же частотная составляющая, что и составляющая команды Vdh по напряжению для оценки положения и частотные составляющие в ее окрестности, и затем результирующий сигнал делится на два сигнала, подаваемых на соответствующие сумматоры 20d и 20q. Сумматоры 20d и 20q добавляют разделенные два сигнала к командам Vd* и Vq* по напряжению приведения в действие и выводят результирующие сигналы в качестве команд Vdp* и Vqp* по напряжению соответственно. Отмечается, что также в данном случае, если та же частотная составляющая, что и составляющая команды Vdh по напряжению для оценки положения, или частотные составляющие в ее окрестности, не включаются в команду Vmdq по напряжению для уменьшения шума, выводимую из генератора 8 напряжения для уменьшения шума, фильтр 9 может быть исключен.
Таким образом, команда Vmdq по напряжению для уменьшения шума не оказывает неблагоприятного влияния на команду Vdh по напряжению для оценки положения, и изменяются во времени моменты переключения переключающих устройств, включенных в средство 3 приложения напряжения. Поэтому от электрической вращающейся машины 1 возникает шум, включающий в себя множество частотных составляющих в соответствии с моментами переключения. В результате не является заметным шум, возникающий вместе с приложением команды Vdh по напряжению для оценки положения к электрической вращающейся машины 1, и может быть уменьшено чувство дискомфорта, которое ощущает человек.
Как описано выше, в варианте 4 осуществления, когда команда Vdh по напряжению для оценки положения, которая представляет собой переменное напряжение, генерируемое генератором 7 напряжения для оценки положения, добавляется к команде Vd* по напряжению d-оси, генератор 8 напряжения для уменьшения шума выводит одну команду Vmdq по напряжению для уменьшения шума, включающую в себя волну с АМ-модуляцией, амплитуда которой изменяется во времени, или волну с АМ-модуляцией, амплитуда которой изменяется во времени ступенчатым образом. Поэтому изменяются моменты переключения переключающих устройств, включенных в средство 3 приложения напряжения, и от электрической вращающейся машины 1 возникает шум, включающий в себя множество частотных составляющих, как и в варианте 2 осуществления. Поэтому шум, возникающий от электрической вращающейся машины 1 вместе с приложением команды Vdh по напряжению для оценки положения, может подавляться так, чтобы он не был заметным, и в результате может быть уменьшено чувство дискомфорта, которое человек ощущает от шума. Кроме того, в варианте 4 осуществления, так как прикладывается команда Vm по напряжению для уменьшения шума, может быть упрощена конфигурация генератора 8 напряжения для уменьшения шума и может быть предотвращено появление потерь из-за добавление команды Vm по напряжению для уменьшения шума по сравнению с вариантом 3 осуществления.
Промышленная применимость
В вариантах 1-4 осуществления синхронная машина типа со встроенными магнитами используется в качестве электрической вращающейся машины 1. Однако устройство управления для электрической вращающейся машины согласно настоящему изобретению также применимо к синхронным машинам других типов, таких как реактивного синхронного типа.








Изобретение относится к области электротехники и может быть использовано для управления как асинхронной, так и синхронной машиной, получающей информацию о положении ротора без использования датчика углового положения. Технический результат - точность оценки положения ротора электрической машины и эффективность уменьшения чувства дискомфорта из-за шума. Средство (5) управления для вывода команды по напряжению для управления приведением в действие на электрическую вращающуюся машину (1) включает в себя секцию (6) вычисления команды по напряжению приведения в действие для вычисления команд по напряжению приведения в действие для приведения в действие электрической вращающейся машины (1), генератор (7) напряжения для оценки положения для генерирования команд по напряжению для оценки положения для оценки положения электрической вращающейся машины (1), генератор (8) напряжения для уменьшения шума для генерирования команд по напряжению для уменьшения шума для уменьшения шума, возникающего от электрической вращающейся машины (1) вместе с вводом команд по напряжению для оценки положения в электрическую вращающуюся машину (1), и сумматоры (20u, 20v и 20w) для вывода на средство (3) приложения напряжения команды по напряжению, полученной посредством добавления команд по напряжению для оценки положения и команд по напряжению для уменьшения шума к командам по напряжению приведения в действие. 7 з.п. ф-лы, 13 ил.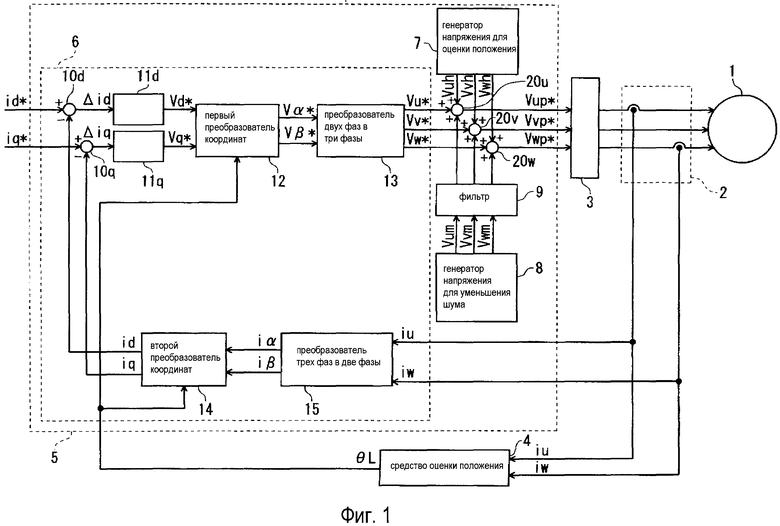
1. Устройство управления для электрической вращающейся машины для выполнения управления приведением в действие электрической вращающейся машины, содержащее:
средство детектирования тока для детектирования токов электрической вращающейся машины, протекающих в электрической вращающейся машине;
средство оценки положения для оценки положения ротора электрической вращающейся машины на основании токов электрической вращающейся машины, детектированных средством детектирования тока;
средство управления для вывода команд по напряжению на основании токов электрической вращающейся машины, детектированных средством детектирования тока, и информации о положении ротора, оцененном средством оценки положения; и
средство приложения напряжения для приложения напряжения для управления приведением в действие к электрической вращающейся машине на основании команд по напряжению, выводимых средством управления;
причем средство управления включает в себя секцию вычисления команды по напряжению приведения в действие для вычисления команд по напряжению приведения в действие для приведения в действие электрической вращающейся машины,
средство управления включает в себя генератор напряжения для оценки положения для вывода команд по напряжению для оценки положения для оценки положения ротора электрической вращающейся машины,
средство управления включает в себя генератор напряжения для уменьшения шума для вывода команд по напряжению для уменьшения шума, имеющих частоты, отличающиеся от частот команд по напряжению приведения в действие и от частот команд по напряжению для оценки положением, и
средство управления включает в себя сумматоры для добавления команд по напряжению для оценки положения и команд по напряжению для уменьшения шума к командам по напряжению приведения в действие, и выводит результирующий сигнал в качестве команд по напряжению на средство приложения напряжения.
2. Устройство управления для электрической вращающейся машины по п.1, в котором
генератор напряжения для уменьшения шума выводит одну команду по напряжению для уменьшения шума, и
сумматоры делят одну команду по напряжению для уменьшения шума на множество сигналов и добавляют множество сигналов к командам по напряжению приведения в действие для соответствующих фаз.
3. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором фильтр для удаления той же частотной составляющей, что и составляющая команд по напряжению для оценки положения из команд по напряжению для уменьшения шума, обеспечен между генератором напряжения для уменьшения шума и сумматорами.
4. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором генератор напряжения для уменьшения шума выводит команды по напряжению для уменьшения шума, частоты которых изменяются во времени.
5. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором генератор напряжения для уменьшения шума выводит команды по напряжению для уменьшения шума, амплитуды которых изменяются во времени.
6. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором генератор напряжения для оценки положения выводит команды по напряжению трехфазного переменного тока для оценки положения в качестве команд по напряжению для оценки положения для оценки положения электрической вращающейся машины.
7. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором генератор напряжения для оценки положения выводит команды по напряжению для оценки положения, которые представляют собой переменное напряжение, в качестве команд по напряжению для оценки положения для оценки положения электрической вращающейся машины.
8. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором средство оценки положения оценивает положение ротора электрической вращающейся машины на основании тока, имеющего ту же частотную составляющую, что и составляющая команд по напряжению для оценки положения, причем ток включен в ток электрической вращающейся машины.
| RU 2132110 C1, 20.06.1999 | |||
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| US 20070132424 A1, 14.06.2007 | |||
| US 2006014496 A, 12.01.2006 | |||
| JP 2008199842 A, 28.08.2008 | |||
| JP 200443833 A, 02.02.2004 | |||
| JP 200732406 A, 13.12.2007 | |||
| EP 1107448 B1, 14.06.2007 | |||
| EP 1873901 A2, 02.01.2008. | |||

