Область техники
Настоящее изобретение относится к устройству управления и способу управления для электрической вращающейся машины, например, асинхронной машины или синхронной машины, которые допускают получение информации положения ротора без использования датчика положения вращения и выполнение управления возбуждением для электрической вращающейся машины.
Предшествующий уровень техники
Чтобы точно управлять операцией вращения электрической вращающейся машины, требуется информация положения ротора электрической вращающейся машины и информация о токе, протекающем в электрической вращающейся машине. Здесь, традиционно, информация положения ротора получается посредством дополнительного присоединения датчика положения вращения к электрической вращающейся машине. Тем не менее дополнительное обеспечение датчиком положения вращения имеет значительный недостаток с точки зрения снижения стоимости, уменьшения пространства, увеличения надежности. Следовательно, требуется переход с типа управления с использованием датчика положения вращения на тип управления без датчика.
Примеры способов управления для перевода электрической вращающейся машины типа с использованием датчика положения вращения на тип без датчика включают в себя способ оценки положения ротора электрической вращающейся машины, главным образом по индуктивному напряжению электрической вращающейся машины, и способ оценки положения ротора электрической вращающейся машины посредством использования характерного признака.
Индуктивное напряжение, которое используется в первом способе, имеет такую характеристику, что его абсолютная величина является пропорциональной скорости электрической вращающейся машины. Следовательно, на нулевой скорости или низкой скорости индуктивное напряжение снижается, и отношение "сигнал-шум" ухудшается. Как результат, становится трудным точно оценивать положение ротора электрической вращающейся машины.
С другой стороны, во втором способе, который использует особенность, чтобы определять характерный признак (зависимость положения от индуктивности) электрической вращающейся машины, высокочастотное напряжение, имеющее частоту, отличающуюся от частоты возбуждения электрической вращающейся машины, прикладывается к электрической вращающейся машине, определяется высокочастотный ток, протекающий в электрической вращающейся машине наряду с приложением высокочастотного напряжения, и положение электрической вращающейся машины оценивается посредством использования того факта, что абсолютная величина высокочастотного тока варьируется в зависимости от положения электрической вращающейся машины вследствие характерного признака электрической вращающейся машины.
Таким образом, способ с использованием характерного признака имеет преимущество в том, что положение ротора электрической вращающейся машины может быть оценено независимо от скорости электрической вращающейся машины, хотя сигнал оценки положения для оценки положения ротора электрической вращающейся машины должен вводиться в электрическую вращающуюся машину. Следовательно, в особенности, на нулевой скорости или низкой скорости используется способ управления положением без датчика с использованием характерного признака.
Традиционно, например, технологии, раскрытые в непатентном документе 1 (K. Ide, "Saliency-based Sensorless Drive of Adequate Designed IPM Motor for Robot Vehicle Application", PCC-Nagoya, 2007, стр.1126-1133) и патентном документе 1 (Выложенная патентная публикация (Япония) номер 2004-343833) предложены в качестве способов оценки положения ротора электрической вращающейся машины посредством использования характерного признака.
Таким образом, традиционный способ оценки положения, раскрытый в непатентном документе 1, оценивает положение посредством приложения высокочастотного напряжения по оси Y, которая является данной осью управления. Таким образом, ток, протекающий в электрической вращающейся машине вследствие приложения высокочастотного напряжения по оси Y, причем этот ток имеет частотную составляющую, идентичную частотной составляющей высокочастотного напряжения, преобразуется в ток idm на dm-оси, которая запаздывает на 45 градусов от оси Y, и ток iqm на qm-оси, которая опережает на 45 градусов ось Y. Затем абсолютные величины Idm и Iqm токов idm и iqm вычисляются посредством использования преобразования Фурье, и пропорционально-интегральное регулирование (PI-регулирование) выполняется так, что абсолютные величины Idm и Iqm становятся равными друг другу, посредством чего косвенно оценивается положение электрической вращающейся машины.
Между тем в традиционной технологии, раскрытой в патентном документе 1, чтобы уменьшать шум, вызываемый посредством напряжения или тока, имеющего частоту, превышающую основную частоту, прикладываемого к электрической вращающейся машине для оценки положения электрической вращающейся машины, частота напряжения или тока, прикладываемого к электрической вращающейся машине, причем эта частота превышает основную частоту, задается произвольной.
Краткое изложение существа изобретения
В традиционной технологии, раскрытой в непатентном документе 1, преобразование Фурье используется для вычисления абсолютных величин токов idm и iqm. В преобразовании Фурье должны быть подготовлены синусоидальная функция sin ωht и косинусоидальная функция cos ωht, имеющие угловую частоту ωh, идентичную угловой частоте высокочастотного напряжения, приложенного по оси Y. Следовательно, необходимы дополнительное вычисление посредством микрокомпьютера (в дальнейшем в этом документе, называемого микрокомпьютером) и дополнительное запоминающее устройство микрокомпьютера для подготовки функций sin ωht и cos ωht. В некоторых случаях это приводит к увеличению стоимости микрокомпьютера, что является нежелательным для создания продуктов.
Между тем в традиционной технологии, раскрытой в патентном документе 1, чтобы уменьшать шум, вызываемый напряжением или током, имеющим частоту, превышающую основную частоту, прикладываемую к электрической вращающейся машине для оценки положения электрической вращающейся машины, частота напряжения или тока, прикладываемого к электрической вращающейся машине, причем эта частота превышает основную частоту, задается произвольной. Тем не менее конкретный способ оценки положения не раскрывается.
Здесь допускается использование, в технологии патентного документа 1, известной технологии, в которой: определяются высокочастотный ток или высокочастотное напряжение, полученные посредством приложения напряжения или тока, имеющего частоту, превышающую основную частоту, к электрической вращающейся машине; и положение электрической вращающейся машины оценивается посредством использования того факта, что абсолютные величины (амплитуды) высокочастотного тока и высокочастотного напряжения зависят от положения электрической вращающейся машины. Обычно при вычислении абсолютной величины высокочастотного тока или высокочастотного напряжения, которое имеет частоту, превышающую основную частоту, посредством использования преобразования Фурье и т.п., интервал интегрирования в преобразовании Фурье задается равным целому кратному полупериода тока или напряжения, имеющего частоту, превышающую основную частоту. Тем не менее если частота тока или напряжения, причем эта частота превышает основную частоту, задается произвольной, как в патентном документе 1, период тока или напряжения также становится произвольным. Следовательно, интервал интегрирования в преобразовании Фурье не может быть задан надлежащим образом, и положение вращения не может детектироваться точно.
Настоящее изобретение осуществлено для того, чтобы разрешать вышеуказанные проблемы.
Задача настоящего изобретения состоит в том, чтобы предоставить устройство управления и способ управления, которые допускают: вычисление амплитуды тока для оценки положения без выполнения преобразования Фурье; как результат, уменьшить объем вычислений, тем самым уменьшить вычислительную нагрузку; и обеспечить точную оценку положения ротора электрической вращающейся машины.
Устройство управления для электрической вращающейся машины согласно настоящему изобретению выполняет управление возбуждением электрической вращающейся машины. Устройство управления содержит средство детектирования тока для детектирования тока электрической вращающейся машины, протекающего в электрической вращающейся машине, средство оценки положения для оценки положения ротора электрической вращающейся машины на основе тока электрической вращающейся машины, детектируемого средством детектирования тока, средство управления для вывода инструкций управления напряжением на основе тока электрической вращающейся машины, детектируемого средством детектирования тока, и информации о положении ротора, оцененного средством оценки положения, и средство приложения напряжения для приложения напряжения для управления возбуждением к электрической вращающейся машине на основе инструкций управления напряжением, выводимых из средства управления. Средство управления включает в себя блок вычисления инструкций управления напряжением возбуждения для вычисления инструкций управления напряжением возбуждения для возбуждения электрической вращающейся машины, генератор напряжения оценки положения для вывода инструкций управления напряжением оценки положения для оценки положения ротора электрической вращающейся машины и сумматоры для суммирования инструкций управления напряжением оценки положения с инструкциями управления напряжением возбуждения и вывода результирующих сигналов в качестве инструкций управления напряжением в средство приложения напряжения. Средство оценки положения включает в себя модули извлечения тока для извлечения токов оценки положения, имеющих частотную составляющую, идентичную частотной составляющей инструкций управления напряжением оценки положения, включенных в токи электрической вращающейся машины, детектируемые средством детектирования тока, блок вычисления амплитуд тока оценки положения для вычисления амплитуд тока оценки положения на основе токов оценки положения, извлеченных посредством модулей извлечения тока, и модуль вычисления положения для выполнения вычисления оценки положения ротора электрической вращающейся машины на основе амплитуд тока оценки положения, вычисляемых посредством блока вычисления амплитуд тока оценки положения. Блок вычисления амплитуд тока оценки положения вычисляет амплитуду тока оценки положения на основе квадратов токов оценки положения.
Устройство управления для электрической вращающейся машины согласно настоящему изобретению при вычислении амплитуд тока оценки положения посредством блока вычисления амплитуд тока оценки положения средства оценки положения, вычисляет амплитуды тока оценки положения посредством использования только квадратов токов оценки положения, чтобы оценивать положение ротора, без выполнения преобразования Фурье. Следовательно, вычисление и запоминающее устройство для подготовки синусоидальной функции и косинусоидальной функции, которые являются необходимыми в преобразовании Фурье, не являются необходимыми. Как результат, становится возможным исключить коэффициенты, которые увеличивают объем вычислений, запоминающие устройства и т.п., микрокомпьютеры и т.п., и выполнять управление возбуждением для электрической вращающейся машины с высокой эффективностью и без необязательного увеличения затрат.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 1 осуществления настоящего изобретения;
Фиг.2 изображает диаграмму формы сигнала напряжений оценки положения, генерируемых посредством генератора напряжения оценки положения устройства управления;
Фиг.3 изображает диаграмму формы сигнала токов оценки положения, извлеченных посредством модуля извлечения тока устройства управления;
Фиг.4 изображает диаграмму формы сигнала амплитуд тока оценки положения, полученных посредством блока вычисления амплитуд тока оценки положения устройства управления;
Фиг.5 изображает схему для иллюстрации работы модуля вычисления положения устройства управления;
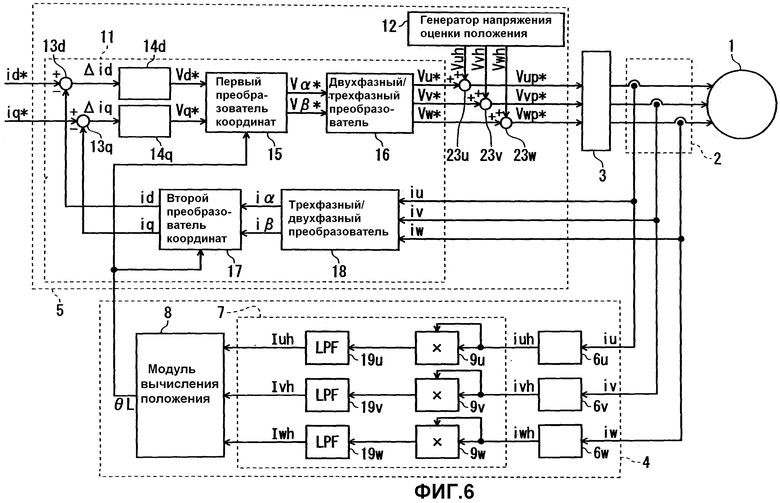
Фиг.6 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 2 осуществления настоящего изобретения;
Фиг.7 изображает диаграмму характеристики ослабления частот для иллюстрации работы фильтра нижних частот блока вычисления амплитуд тока оценки положения устройства управления;
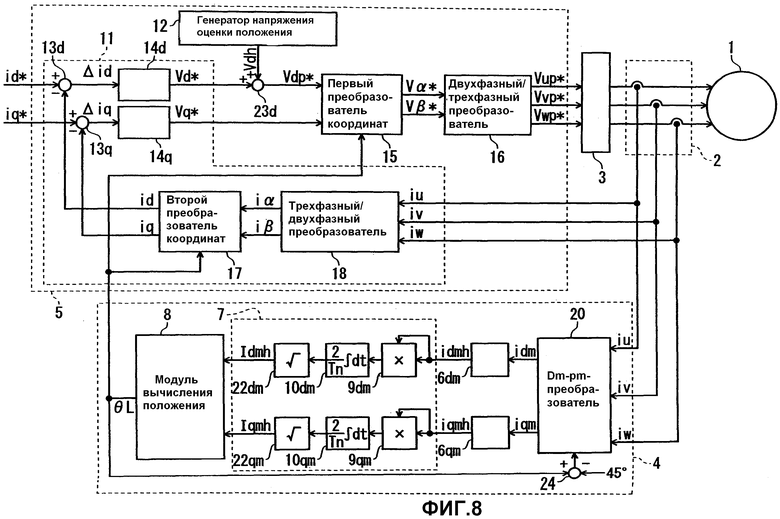
Фиг.8 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 3 осуществления настоящего изобретения;
Фиг.9 изображает схему для иллюстрации операции вычисления модуля вычисления положения устройства управления;
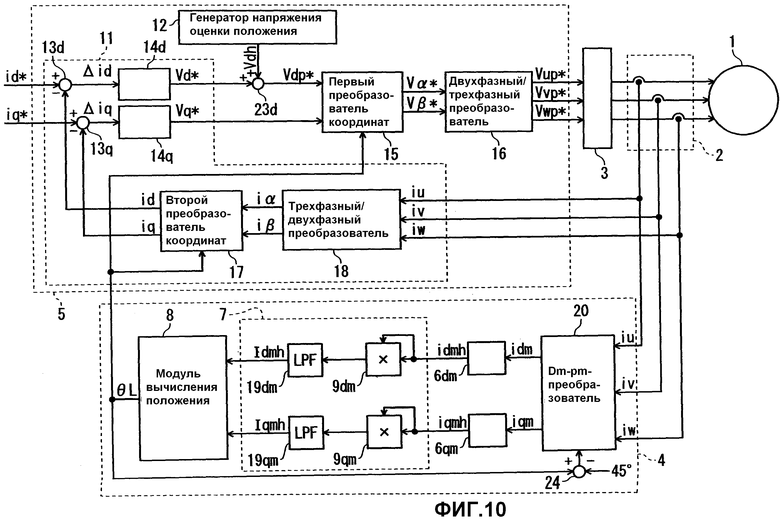
Фиг.10 изображает схему модификации конфигурации устройства управления для электрической вращающейся машины согласно варианту 3 осуществления настоящего изобретения;
Фиг.11 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 4 осуществления настоящего изобретения;
Фиг.12 изображает схему модификации конфигурации устройства управления для электрической вращающейся машины согласно варианту 4 осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления изобретения
Вариант 1 осуществления
Фиг.1 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 1 осуществления настоящего изобретения.
В варианте 1 осуществления синхронная машина с встроенным магнитом используется в качестве электрической вращающейся машины 1. Устройство управления настоящего варианта осуществления для управления электрической вращающейся машиной 1 включает в себя: средство 3 приложения напряжения, подключенное к электрической вращающейся машине 1, для приложения предварительно определенного управляющего напряжения к электрической вращающейся машине 1; средство 2 детектирования тока для детектирования токов iu, iv и iw электрической вращающейся машины, протекающих между средством 3 приложения напряжения и электрической вращающейся машиной 1; средство 4 оценки положения для оценки положения θL ротора электрической вращающейся машины 1 на основе токов iu, iv и iw электрической вращающейся машины, детектируемых средством 2 детектирования тока; и средство 5 управления для вывода инструкций Vup*, Vvp* и Vwp* управления напряжением для управления возбуждением в средство 3 приложения напряжения.
Средство 2 детектирования тока включает в себя, например, трансформатор тока и т.п. Средство 2 детектирования тока определяет три фазы токов электрической вращающейся машины, включающих в себя ток iu электрической вращающейся машины U-фазы, ток iv электрической вращающейся машины V-фазы и ток iw электрической вращающейся машины W-фазы, из линии питания, соединяющей электрическую вращающуюся машину 1 и средство 3 приложения напряжения.
Следует отметить, что вместо детектирования всех токов iu, iv и iw электрической вращающейся машины U-фазы, V-фазы и W-фазы средство 2 детектирования тока может детектировать токи электрической вращающейся машины любых двух фаз и вычислять ток электрической вращающейся машины другой фазы посредством использования того факта, что токи электрической вращающейся машины находятся в трехфазном равновесии. Альтернативно, средство 2 детектирования тока может детектировать ток на шине постоянного тока, вводимый в средство 3 приложения напряжения, и вычислять токи электрической вращающейся машины из тока на шине постоянного тока.
Средство 3 приложения напряжения включает в себя, например, ШИМ-инвертор для сравнения с треугольной формой волны и т.п. Средство 3 приложения напряжения прикладывает напряжение к электрической вращающейся машине 1 на основе каждой из инструкций Vup*, Vvp* и Vwp* управления напряжением, выводимых из средства 5 управления.
Средство 5 управления включает в себя блок 11 вычисления инструкций управления напряжением возбуждения, генератор 12 напряжения оценки положения и сумматоры 23u, 23v и 23w. Сумматоры 23u, 23v и 23w суммируют инструкции Vuh, Vvh и Vwh управления напряжением оценки положения, выводимые из генератора 12 напряжения оценки положения, с инструкциями Vu*, Vv* и Vw* управления напряжением возбуждения, выводимыми из блока 11 вычисления инструкций управления напряжением возбуждения, соответственно, и результирующие сигналы выводятся в качестве инструкций Vup*, Vvp* и Vwp* управления напряжением в средство 3 приложения напряжения. Следовательно, инструкции Vup*, Vvp* и Vwp* управления напряжением, которые применяются к средству 3 приложения напряжения, являются инструкциями Vu*, Vv* и Vw* управления напряжением возбуждения, на которые инструкции Vuh, Vvh и Vwh управления напряжением оценки положения наложены соответственно. Следует отметить, что инструкции Vuh, Vvh и Vwh управления напряжением оценки положения, выводимые из генератора 12 напряжения оценки положения, подробнее поясняются ниже.
Блок 11 вычисления инструкций управления напряжением возбуждения включает в себя два модуля 13d и 13q вычитания, контроллер 14d тока d-оси, контроллер 14q тока q-оси, первый преобразователь 15 координат, двухфазный/трехфазный преобразователь 16, второй преобразователь 17 координат и трехфазный/двухфазный преобразователь 18.
Модуль 13d вычитания, который является одним из модулей вычитания, вычисляет отклонение Aid между инструкцией id* управления током d-оси для возбуждения электрической вращающейся машины 1, которая предоставлена извне средства 5 управления, и током id, выводимым из второго преобразователя 17 координат. Контроллер 14d тока d-оси, предоставленный на следующем этапе, выполняет пропорционально-интегральное регулирование (PI- регулирование) так, что отклонение Aid становится равным нулю, тем самым вычисляя инструкцию Vd* управления напряжением d-оси.
Модуль 13q вычитания, который является отличным от модулей вычитания, вычисляет отклонение Δiq между инструкцией тока q-оси iq* для возбуждения электрической вращающейся машины 1, которая предоставлена извне средства 5 управления, и током iq, выводимым из второго преобразователя 17 координат. Контроллер 14q тока q-оси, предоставленный на следующем этапе выполняет пропорционально-интегральное регулирование (PI-регулирование) так, что отклонение Δiq становится равным нулю, тем самым вычисляя инструкцию Vq* управления напряжением q-оси.
Первый преобразователь 15 координат преобразует инструкцию Vd* управления напряжением d-оси и инструкцию Vq* управления напряжением q-оси, выводимые из контроллера 14d тока d-оси и контроллера 14q тока q-оси, в инструкции Vα* и Vβ* управления напряжением на двух осях (α-β-осях) в состоянии покоя соответственно. Двухфазный/трехфазный преобразователь 16 преобразует инструкции Vα* и Vβ* управления напряжением, выводимые из первого преобразователя 15 координат, в инструкции Vu*, Vv* и Vw* управления напряжением возбуждения в системе координат трехфазного переменного тока.
Трехфазный/двухфазный преобразователь 18 преобразует токи iu, iv и iw электрической вращающейся машины, детектируемые средством 2 детектирования тока, в токи iα и iβ на двух осях (α-β-осях) в состоянии покоя. Второй преобразователь 17 координат преобразует токи iα и iβ, выводимые из трехфазного/двухфазного преобразователя 18, в токи id и iq на двух осях вращения (d-q-осях), вращающихся синхронно с оцененным положением θL, выводимым из средства 4 оценки положения, описанного позже, и выводит токи id и iq в модули 13d и 13q вычитания соответственно.
Генератор 12 напряжения оценки положения формирует для оценки положения ротора электрической вращающейся машины 1 инструкции Vuh, Vvh и Vwh управления напряжением оценки положения, имеющие частоты, отличающиеся от частот инструкций Vu*, Vv* и Vw* управления напряжением возбуждения, выводимых из блока 11 вычисления инструкций управления напряжением возбуждения. Инструкции Vuh, Vvh и Vwh управления напряжением оценки положения могут иметь любой тип до тех пор, пока их частоты отличаются от частот инструкций Vu*, Vv* и Vw* управления напряжением возбуждения. В варианте 1 осуществления инструкции Vuh, Vvh и Vwh управления напряжением оценки положения являются инструкциями управления напряжением оценки положения на основе трехфазного переменного тока.
Таким образом, например, как показано на фиг.2, в случае если средство 3 приложения напряжения является ШИМ-инвертором для сравнения по треугольной волне, если полупериод Tc несущей треугольной волны, используемой для ШИМ-инвертора для сравнения по треугольной волне для выполнения ШИМ-модуляции, составляет один интервал, инструкции Vuh, Vvh и Vwh управления напряжением оценки положения на основе трехфазного переменного тока являются сигналами, один период которых имеет длину в шесть интервалов (=6•Tc). Помимо этого, инструкции Vuh, Vvh и Vwh управления напряжением оценки положения заданы так, что каждая из них смещается на два интервала (=2•Tc) друг от друга, так что они находятся в трехфазном равновесии.
Средство 4 оценки положения включает в себя три модуля 6u, 6v и 6w извлечения тока, блок 7 вычисления амплитуд тока оценки положения и модуль 8 вычисления положения.
Как описано выше, инструкции Vup*, Vvp* и Vwp* управления напряжением, которые применяются к средству 3 приложения напряжения, являются инструкциями Vu*, Vv* и Vw* управления напряжением возбуждения, выводимыми из средства 5 управления, на которые наложены инструкции Vuh, Vvh и Vwh управления напряжением оценки положения, выводимые из генератора 12 напряжения оценки положения, соответственно. Следовательно, токи iu, iv и iw электрической вращающейся машины, детектируемые средством 2 детектирования тока, включают в себя токи iuh, ivh и iwh оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкций Vuh, Vvh и Vwh управления напряжением оценки положения соответственно.
Следовательно, модули 6u, 6v и 6w извлечения тока извлекают токи iuh, ivh и iwh оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкций Vuh, Vvh и Vwh управления напряжением оценки положения, из токов iu, iv и iw электрической вращающейся машины, детектируемых средством 2 детектирования тока, соответственно. В частности, токи iuh, ivh и iwh оценки положения извлекаются посредством использования полосового фильтра, или частотные составляющие токов iu, iv и iw электрической вращающейся машины, которые являются идентичными частотным составляющим токов Vuh, Vvh и Vwh управления напряжением оценки положения, соответственно, ослабляются посредством ввода токов iu, iv и iw электрической вращающейся машины в режекторный фильтр, и результирующие токи, которые прошли через режекторный фильтр, вычитаются из токов iu, iv и iw электрической вращающейся машины, соответственно, посредством чего извлекаются токи iuh, ivh и iwh оценки положения.
Блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Iuh, Ivh и Iwh тока оценки положения посредством использования только квадратов токов iuh, ivh и iwh оценки положения, которые выводятся из модулей 6u, 6v и 6w извлечения тока, без выполнения преобразования Фурье. Следовательно, в варианте 1 осуществления блок 7 вычисления амплитуд тока оценки положения включает в себя умножители 9u, 9v и 9w, модули 10u, 10v и 10w интегрирования и модули 22u, 22v и 22w вычисления квадратного корня, которые соответствуют соответствующим фазам.
В дальнейшем в этом документе способ вычисления амплитуд Iuh, Ivh и Iwh тока оценки положения на основе токов iuh, ivh и iwh оценки положения, без выполнения преобразования Фурье, описывается подробно.
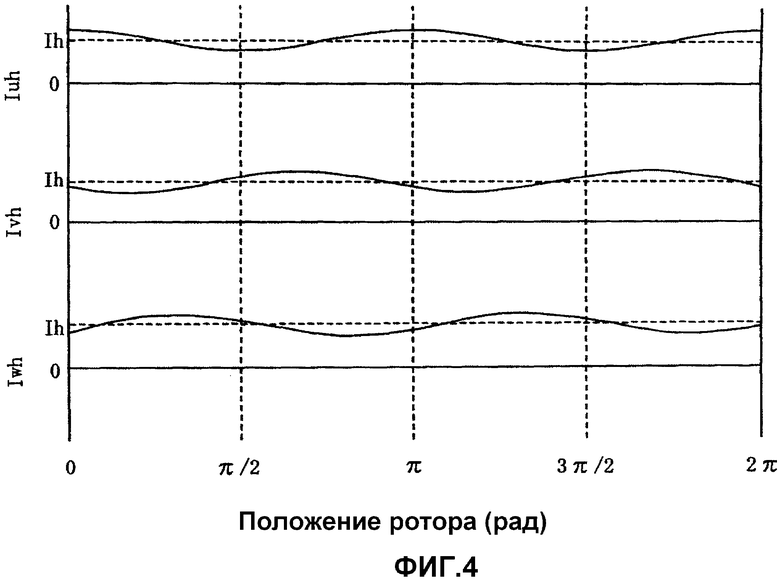
Когда инструкции Vuh, Vvh и Vwh управления напряжением оценки положения на основе трехфазного переменного тока, как показано на фиг.2, применяются к электрической вращающейся машине 1, амплитуды токов iuh, ivh и iwh оценки положения, извлеченных посредством соответствующих модулей 6u, 6v и 6w извлечения тока, варьируются на основе косинусоидальной функции в соответствии с положением электрической вращающейся машины 1, как показано на фиг.3, вследствие характерного признака электрической вращающейся машины 1. Это представляется посредством выражения (1), показанного ниже. Выражение (1) включает в себя информацию положения (угла) 0 электрической вращающейся машины 1. Следовательно, если амплитуды Iuh, Ivh и Iwh тока оценки положения вычисляются, положение θL электрической вращающейся машины 1 может быть оценено.

где: Ih: среднее значение амплитуд тока оценки положения;
Iha: величина изменения тока оценки положения согласно положению электрической вращающейся машины;
θ: положение (угол) электрической вращающейся машины;
ωh: угловая частота инструкции управления напряжением оценки положения.
Здесь с целью сравнения с признаком настоящего изобретения, во-первых, описывается принцип для вычисления, из токов iuh, ivh и iwh оценки положения, показанных на фиг.3, и выражения (1), их амплитудных составляющих посредством использования преобразования Фурье, которое является известной технологией.
В случае если амплитуда Sn_amp сигнала Sn(t) должна вычисляться посредством использования преобразования Фурье, сигнал Sn(t) умножается на функцию (в дальнейшем в этом документе, называемую корреляционной функцией), имеющую частоту, идентичную частоте сигнала Sn(t), посредством чего вычисляется корреляция между сигналом Sn(t) и корреляционной функцией, и затем вычисляется амплитуда Sn_amp. Обычно, синусоидальная функция и косинусоидальная функция используются в качестве корреляционных функций, на которые должен умножаться сигнал Sn(t).
В качестве конкретного примера случай, когда амплитуда Sn_amp вычисляется из сигнала Sn(t), представленного посредством выражения (2), предполагается здесь. Следует отметить, что выражение (2) может представляться посредством выражения (3) через комбинацию тригонометрических функций. Следовательно, амплитуда Sn_amp сигнала Sn(t) приводит к (A2+B2)1/2.
Для вычисления амплитуды Sn_amp посредством использования преобразования Фурье сигнал Sn(t) умножается на каждую из синусоидальной функции sin ωnt и косинусоидальной функции cos ωnt, имеющих частоты, идентичные частотам сигнала Sn(t), которые подготавливаются заранее, результирующий сигнал интегрируется за один период (время, соответствующее одному периоду, обозначается посредством Tn), и затем результирующий сигнал умножается на 2/Tn, посредством чего корреляция между сигналом Sn(t) и синусоидальной функцией sin ωnt и корреляция между сигналом Sn(t) и косинусоидальной функцией cos ωnt, т.е. абсолютной величиной As составляющей синусоидальной функции сигнала Sn(t) и абсолютной величиной Ac составляющей косинусоидальной функции сигнала Sn(t) вычисляется, как показано посредством выражения (4) и выражения (5) соответственно. Затем квадратный корень суммы квадрата абсолютной величины As составляющей синусоидальной функции и квадрата абсолютной величины Ac составляющей косинусоидальной функции вычисляется, как показано посредством выражения (6). Таким образом, получается результат, идентичный результату в выражении (3). Таким образом, обнаружено то, что амплитуда Sn_amp вычисляется посредством использования преобразования Фурье.



В выражении (2), с целью упрощения понимания, сигнал Sn(t) имеет только угловую частоту ωn в качестве своей частотной составляющей и не имеет других частотных составляющих. Тем не менее преобразование Фурье имеет существенную эффективность в случае, если амплитуда сигнала, имеющего конкретную частоту, должна вычисляться из сигнала Sn(t), имеющего множество частотных составляющих. Тем не менее в способе с использованием преобразования Фурье, как показано посредством выражения (4) и выражения (5), синусоидальная функция sin ωnt и косинусоидальная функция cos ωnt, имеющие частоты, идентичные частотам сигнала Sn(t), амплитуда которого должна вычисляться, должна быть подготовлена заранее. Следовательно, существуют недостатки в том, что объем вычислений посредством микрокомпьютера и т.п. для подготовки синусоидальной функции sin ωnt и косинусоидальной функции cos ωnt увеличивается, и что когда синусоидальная функция sin ωnt и косинусоидальная функция cos ωnt сохраняются в микрокомпьютере и т.п., объем запоминающего устройства для сохранения этих функций увеличивается.
Следовательно, в варианте 1 осуществления вместо выполнения преобразования Фурье, как описано выше, блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Iuh, Ivh и Iwh тока оценки положения посредством использования только квадратов токов iuh, ivh и iwh оценки положения, выводимых из модулей 6u, 6v и 6w извлечения тока. В дальнейшем в этом документе описываются подробности этого способа.
При вычислении амплитуд Iuh, Ivh и Iwh на основе токов iuh, ivh и iwh оценки положения посредством блока 7 вычисления амплитуд тока оценки положения, необходимо, как в случае выполнения преобразования Фурье, вычислять корреляции посредством умножения токов iuh, ivh и iwh оценки положения на соответствующие корреляционные функции, имеющие частотные составляющие, идентичные частотным составляющим токов iuh, ivh и iwh оценки положения, амплитуды которых должны вычисляться.
В этом случае токи iuh, ivh и iwh оценки положения, вводимые из модуля извлечения тока 6 в блок 7 вычисления амплитуд тока оценки положения, являются сигналами, полученными посредством извлечения, из токов iu, iv и iw электрической вращающейся машины, частотных составляющих, идентичных частотным составляющим инструкций Vuh, Vvh и Vwh управления напряжением оценки положения, соответственно. Следовательно, токи iuh, ivh и iwh оценки положения главным образом включают в себя сигналы, имеющие частотные составляющие, идентичные частотным составляющим инструкций Vuh, Vvh и Vwh управления напряжением оценки положения, соответственно.
Следовательно, блок 7 вычисления амплитуд тока оценки положения вычисляет корреляции между токами iuh, ivh и iwh оценки положения и ими самими непосредственно, т.е. автокорреляции, в качестве корреляционных функций, на которые токи iuh, ivh и iwh оценки положения должны умножаться, соответственно, вместо использования синусоидальной функции и косинусоидальной функции, подготовленных заранее. При вычислении автокорреляции являются квадратами токов iuh, ivh и iwh оценки положения. Посредством использования автокорреляций синусоидальная функция и косинусоидальная функция не обязательно должны подготавливаться заранее, и объем вычислений и запоминающего устройства может быть в значительной степени уменьшен по сравнению со случаем выполнения преобразования Фурье.
После того как умножители 9u, 9v и 9w для соответствующих фаз возводят в квадрат токи iuh, ivh и iwh оценки положения, чтобы вычислять их автокорреляции вышеописанным способом, соответственно, модули 10u, 10v и 10w интегрирования интегрируют автокорреляции за один период (время, соответствующее одному периоду, обозначается посредством Tn) и умножают результирующие значения на (2/Tn), и затем модули 22u, 22v и 22w вычисления квадратного корня вычисляют 5 квадратных корней выводов из модулей 10u, 10v и 10w интегрирования, посредством чего амплитуды Iuh, Ivh и Iwh тока оценки положения могут вычисляться, соответственно, как в случае выполнения преобразования Фурье.
Например, если ток iuh оценки положения, который соответствует U-фазе, представляется посредством правой стороны выражения (2), амплитуда Iuh тока оценки положения вычисляется посредством использования автокорреляции, как показано посредством выражения (7).
Следует отметить, что в выражении (7) интервал интегрирования составляет один период Tn тока iuh оценки положения. Тем не менее интервал интегрирования не обязательно должен составлять один период Tn. Интервал интегрирования может составлять данный период Tr, который равен или превышает, по меньшей мере, полупериод. В частности, желательно, чтобы интервал интегрирования являлся кратным m (m является положительным целым числом) полупериода каждого из токов iuh, ivh и iwh оценки положения, т.е. интервал интегрирования составлял m•(Tn/2) (m=1, 2, 3,...). В этом случае результирующее значение интегрирования умножается на 2/(m•Tr), вместо (2/Tr). Следует отметить, что хотя выражение (7) показывает случай, когда вычисляется амплитуда Iuh тока оценки положения, которая соответствует u-фазе, амплитуды Ivh и Iwh тока оценки положения, которые соответствуют фазе v и w-фазе, соответственно, также вычисляются таким же образом.
Затем модуль 8 вычисления положения вычисляет оцененное положение θL ротора (в дальнейшем в этом документе, называемое оцененным положением) электрической вращающейся машины 1 на основе амплитуд Iuh, Ivh и Iwh тока оценки положения, вычисляемых посредством блока 7 вычисления амплитуд тока оценки положения. Способ вычисления описывается ниже. Следует отметить, что способ вычисления оцененного положения θL электрической вращающейся машины 1 не ограничивается способом, описанным ниже, и любой способ может использоваться до тех пор, пока оцененное положение θL вычисляется на основе амплитуд Iuh, Ivh и Iwh тока оценки положения.
Амплитуды Iuh, Ivh и Iwh тока оценки положения, полученные посредством блока 7 вычисления амплитуд тока оценки положения вышеописанным способом, являются значениями, полученными на основе токов iuh, ivh и iwh оценки положения, представленных посредством выражения (1) или показанных на фиг.3. Следовательно, как показано на фиг.4, смещение Ih наложено на каждую из амплитуд Iuh, Ivh и Iwh тока оценки положения, и амплитуды Iuh, Ivh и Iwh тока оценки положения меняются в зависимости от 1/2 периода положения ротора (электрического угла) электрической вращающейся машины 1.
Следовательно, как показано посредством выражения (8), во-первых, модуль 8 вычисления положения вычитает смещение Ih из каждой из амплитуд Iuh, Ivh и Iwh тока оценки положения, тем самым вычисляя сигналы dIu, dIv и dIw вычисления положения. Здесь, поскольку амплитуды Iuh, Ivh и Iwh тока оценки положения находятся в трехфазном равновесии, смещение Ih может вычисляться, как показано посредством выражения (9).

Оцененное положение θL электрической вращающейся машины 1 может вычисляться посредством выполнения операции вычисления арккосинуса для одного из сигналов dIu, dIv и dIw вычисления положения, показанных в выражении (8). Тем не менее необходимо выполнять операцию вычисления арккосинуса и сохранять арккосинусоидальную функцию заранее, что приводит к увеличению объема вычислений и запоминающего устройства. Следовательно, этот способ не является предпочтительным. Вместо использования арккосинусоидальной функции вариант 1 осуществления использует способ вычисления оцененного положения θL электрической вращающейся машины 1 посредством использования линейного приближения. В дальнейшем в этом документе описывается этот способ.
В модуле 8 вычисления положения на основе взаимозависимости между сигналами dIu, dIv и dIw вычисления положения, вычисляемыми посредством выражения (8), сигналы dIu, dIv и dIw вычисления положения делятся на шесть интервалов (I-VI), средние положения θM которых представляются посредством выражения (10), как показано на фиг.5.

В каждом из интервалов (I-VI) один из сигналов dIu, dIv и dIw вычисления положения, который переходит через нуль в середине интервала, представляется посредством функции от sin или -sin. Поскольку функция от sin или -sin в каждом из интервалов (I-VI) рассматривается в качестве прямой линии, сигнал в каждом из интервалов (I-VI) подвергается линейному приближению, и отклонение ∆θML между средним положением θM каждого из интервалов (I-VI) и оцененным положением θL электрической вращающейся машины 1 (=положение θ электрической вращающейся машины 1) вычисляется на основе выражения (11). Здесь dI_uvw в выражении (11) является значением по вертикальной оси каждого из сигналов dIu, dIv и dIw вычисления положения как есть, когда сигнал переходит через нуль в среднем положении θM в каждом из интервалов (I-VI). Помимо этого, поскольку Iha является величиной изменения каждого из токов iuh, ivh и iwh оценки положения согласно положению электрической вращающейся машины, как показано в выражении (1), Iha/2 является амплитудой каждого из сигналов dIu, dIv и dIw вычисления положения.
Следует отметить, что Iha/2 в выражении (11) может вычисляться из квадратного корня суммы квадратов сигналов dIu, dIv и dIw вычисления положения, как показано выражением (12).
Затем, как показано выражением (13), ∆θML, вычисляемое выражением (11), и среднее положение θM суммируются, посредством чего вычисляется оцененное положение θL электрической вращающейся машины 1.
Посредством конфигурирования модуля 8 вычисления положения, как описано выше, становится возможным легко вычислять положение θL ротора без выполнения операции вычисления арккосинуса или сохранения арккосинусоидальной функции заранее.
В вышеприведенном описании блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Iuh, Ivh и Iwh тока оценки положения (абсолютные значения) посредством использования автокорреляций. Тем не менее, в случае если модуль 8 вычисления положения оценивает положение посредством использования взаимозависимости между сигналами dIu, dIv и dIw вычисления положения, необходимо получать только взаимозависимость между сигналами dIu, dIv и dIw вычисления положения. Следовательно, блок 7 вычисления амплитуд тока оценки положения не обязательно должен вычислять амплитуды Iuh, Ivh и Iwh тока оценки положения (абсолютные значения), но может вычислять отношения Iuh_a, Ivh_a и Iwh_a амплитуд тока оценки положения, которые являются отношениями амплитуд для амплитуд тока оценки положения соответствующих фаз посредством использования автокорреляций.
Таким образом, когда блок 7 вычисления амплитуд тока оценки положения вычисляет отношения Iuh_a, Ivh_a и Iwh_a амплитуд тока оценки положения, умножение на (2/Tn)1/2, которое необходимо для вычисления абсолютных значений, не является необходимым, и квадратный корень также не является необходимым. Следовательно, например, выражение (7) может упрощаться как выражение (14).

Таким образом, становится возможным упрощать конфигурацию блока 7 вычисления амплитуд тока оценки положения и уменьшать вычислительную нагрузку. Следует отметить, что также в случае, если блок 7 вычисления амплитуд тока оценки положения вычисляет отношения Iuh_a, Ivh_a и Iwh_a амплитуд тока оценки положения соответствующих фаз, модуль 8 вычисления положения может вычислять оцененное положение θL таким же образом, на основе выражений (8)-(13).
Как описано выше, в варианте 1 осуществления конфигурация блока 7 вычисления амплитуд тока оценки положения является такой, что автокорреляции, полученные посредством возведения в квадрат токов iuh, ivh и iwh оценки положения, используются для вычисления амплитуд Iuh, Ivh и Iwh тока оценки положения. Следовательно, необязательно подготавливать синусоидальную функцию и косинусоидальную функцию заранее, как в случае выполнения преобразования Фурье. Следовательно, объем вычислений и запоминающего устройства может быть в значительной степени уменьшен.
Помимо этого, в случае выполнения преобразования Фурье, такая из составляющей косинусоидальной функции и составляющей синусоидальной функции включается в сигнал, амплитуда которого вычислена, то, какая величина этой составляющей включается в сигнал, является неизвестным. Следовательно, две функции из косинусоидальной функции и синусоидальной функции должны использоваться в качестве корреляционных функций. С другой стороны, в варианте 1 осуществления поскольку блок 7 вычисления амплитуд тока оценки положения использует автокорреляции, только сигнал, амплитуда которого должна вычисляться, необходим в качестве корреляционной функции, на которую должен умножаться сигнал. Следовательно, число умножений может быть сокращено на 1 по сравнению со случаем выполнения преобразования Фурье. Также в этом отношении объем вычислений может быть уменьшен по сравнению со случаем выполнения преобразования Фурье.
Помимо этого, в случае если положение оценивается посредством использования взаимозависимости между сигналами dIu, dIv и dIw вычисления положения, амплитуды Iuh, Ivh и Iwh тока оценки положения (абсолютные значения) не должны вычисляться. Следовательно, вычисление абсолютных значений посредством использования автокорреляций не является необходимым, и объем вычислений дополнительно уменьшается, что является преимущественным.
Вариант 2 осуществления
Фиг.6 является схемой, показывающей конфигурацию устройства управления для электрической вращающейся машины согласно варианту 2 осуществления настоящего изобретения. Составляющие, которые соответствуют или являются идентичными составляющим в варианте 1 осуществления, показанном на фиг.1, обозначаются идентичными ссылками с номерами. Следует отметить, что на фиг.6 конфигурации, помимо конфигурации блока 7 вычисления амплитуд тока оценки положения средства 4 оценки положения, являются идентичными конфигурациям в варианте 1 осуществления. Следовательно, описание конфигураций, помимо конфигурации блока 7 вычисления амплитуд тока оценки положения, здесь опускается.
В средстве 4 оценки положения модули 6u, 6v и 6w извлечения тока извлекают токи iuh, ivh и iwh оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкций Vuh, Vvh и Vwh управления напряжением оценки положения, из токов iu, iv и iw электрической вращающейся машины, соответственно, как в варианте 1 осуществления. Следовательно, блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Iuh, Ivh и Iwh тока оценки положения посредством использования автокорреляции и выводит амплитуды Iuh, Ivh и Iwh тока оценки положения, которые являются результатом вычисления, в модуль 8 вычисления положения на следующей стадии.
В этом случае блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Iuh, Ivh и Iwh тока оценки положения на основе квадратов токов iuh, ivh и iwh оценки положения посредством использования автокорреляции, как в варианте 1 осуществления. Способ вычисления отличается от способа вычисления в варианте 1 осуществления.
Таким образом, в блоке 7 вычисления амплитуд тока оценки положения варианта 1 осуществления умножители 9u, 9v и 9w возводят в квадрат токи iuh, ivh и iwh оценки положения, модули 10u, 10v и 10w интегрирования интегрируют результирующие значения, и затем модули 22u, 22v и 22w вычисления квадратного корня вычисляют квадратные корни результирующих значений, посредством которых амплитуды Iuh, Ivh и Iwh тока оценки положения вычисляются, соответственно, тогда как в блоке 7 вычисления амплитуд тока оценки положения варианта 2 осуществления, умножители 9u, 9v и 9w возводят в квадрат токи iuh, ivh и iwh оценки положения, и результирующие значения вводятся в фильтры 19u, 19v и 19w нижних частот, посредством которых амплитуды Iuh, Ivh и Iwh тока оценки положения вычисляются соответственно. В дальнейшем в этом документе описывается принцип для вычисления.
Фиг.7 изображает пример частотной характеристики фильтра нижних частот, имеющего постоянную времени в 0,01 [с] (частота отсечки 100 [рад/сек]). Частоты токов iuh, ivh и iwh оценки положения являются идентичными частотам инструкций Vuh, Vvh и Vwh управления напряжением оценки положения, формируемых посредством генератора 12 напряжения оценки положения, и существенно превышают частоты инструкций Vu*, Vv* и Vw* управления напряжением возбуждения, выводимых из блока 11 вычисления инструкций управления напряжением возбуждения, соответственно. С другой стороны, частоты (временные вариации) амплитуд Iuh, Ivh и Iwh тока оценки положения в два раза превышают частоту вращения электрической вращающейся машины 1, т.е. в два раза превышают частоты инструкций Vu*, Vv* и Vw* управления напряжением возбуждения, как показано на фиг.4, и существенно ниже частот токов iuh, ivh и iwh оценки положения соответственно.
Таким образом, частоты токов iuh, ivh и iwh оценки положения в значительной степени отличаются от частот амплитуд Iuh, Ivh и Iwh тока оценки положения соответственно. Следовательно, если постоянная времени надлежащим образом предварительно задана так, что частоты отсечки фильтров 19u, 19v и 19w нижних частот равны или ниже частот отсечки токов iuh, ivh и iwh оценки положения (которые являются идентичными частотам отсечки напряжений оценки положения) и равны или превышают частоты отсечки амплитуд Iuh, Ivh и Iwh тока оценки положения, соответственно, только сигналы амплитуд Iuh, Ivh и Iwh тока оценки положения проходят через фильтры 19u, 19v и 19w нижних частот, соответственно, и токи iuh, ivh и iwh оценки положения отсекаются. Как результат, могут детектироваться амплитуды Iuh, Ivh и Iwh тока оценки положения.
Например, на фиг.7, если угловые частоты токов iuh, ivh и iwh оценки положения равны 10000 [рад/сек] (метка ■ на фиг.7) и частоты амплитуд Iuh, Ivh и Iwh тока оценки положения равны 1 [рад/сек] (метка ▲ на фиг.7), усиления относительно токов iuh, ivh и iwh оценки положения составляют -40 [дБ], и усиления относительно изменений амплитуд Iuh, Ivh и Iwh тока оценки положения равны 0 [дБ]. Следовательно, обнаружено то, что фильтры 19u, 19v, 19w нижних частот могут детектировать амплитуды Iuh, Ivh и Iwh тока оценки положения соответственно.
Как описано выше, в варианте 2 осуществления, блок 7 вычисления амплитуд тока оценки положения включает в себя фильтры 19u, 19v и 19w нижних частот вместо модулей 10u, 10v и 10w интегрирования и модулей 22u, 22v и 22w вычисления квадратного корня варианта 1 осуществления, и квадраты токов iuh, ivh и iwh оценки положения вводятся в фильтры 19u-19w нижних частот соответственно, посредством которых вычисляются амплитуды Iuh, Ivh и Iwh тока оценки положения. Следовательно, операция интегрирования и т.п. не является необходимой, и увеличение объема вычислений и запоминающего устройства микрокомпьютера и т.п. может подавляться по сравнению с вариантом 1 осуществления.
В случае если, как в традиционной технологии, раскрытой в вышеописанном патентном документе 1, частоты напряжений Vuh, Vvh и Vwh оценки положения задаются произвольными, чтобы уменьшать шум, вызываемый посредством напряжений оценки положения, приложенных к электрической вращающейся машине, причем эти напряжения оценки положения имеют частоты, превышающие частоту сигнала возбуждения для возбуждения вращающейся электрической машины, которая равна основной частоте, когда амплитуды Iuh, Ivh и Iwh тока оценки положения должны вычисляться посредством интегрирования квадратов токов iuh, ivh и iwh оценки положения, как в варианте 1 осуществления, трудно корректно вычислять амплитуды Iuh, Ivh и Iwh тока оценки положения, если интервал интегрирования надлежащим образом не задается, поскольку периоды токов iuh, ivh и iwh оценки положения также являются произвольными.
С другой стороны, в случае использования фильтров 19u, 19v и 19w нижних частот, как в варианте 2 осуществления, амплитуды Iuh, Ivh и Iwh тока оценки положения могут вычисляться без учета интервала интегрирования, как описано выше. Следовательно, существует преимущество в случае, если частоты напряжений оценки положения задаются произвольными. В этом случае, предпочтительно, чтобы частоты отсечки фильтров 19u, 19v и 19w нижних частот были равны или меньше нижних пределов (нижних пределов частот, которые могут произвольно варьироваться) частот токов iuh, ivh и iwh оценки положения и равны или превышали частоты амплитуд Iuh, Ivh и Iwh тока оценки положения соответственно.
В варианте 2 осуществления случай, когда блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Iuh, Ivh и Iwh тока оценки положения (абсолютные значения), предполагается в описании. Тем не менее настоящее изобретение не ограничено этим. Как в варианте 1 осуществления отношения Iuh_a, Ivh_a и Iwh_a амплитуд тока оценки положения, которые являются отношениями амплитуд для амплитуд тока оценки положения соответствующих фаз, могут вычисляться посредством использования автокорреляций, посредством чего получается идентичный эффект.
Вариант 3 осуществления
Фиг.8 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 3 осуществления настоящего изобретения. Составляющие, которые соответствуют или являются идентичными составляющим варианта 1 осуществления, показанного на фиг.1, обозначаются посредством идентичных ссылок с номерами. Следует отметить, что на фиг.8 конфигурации, помимо конфигураций средства 4 оценки положения и средства 5 управления, являются идентичными в варианте 1 осуществления. Следовательно, описание конфигураций, помимо конфигураций средства 4 оценки положения и средства 5 управления, здесь опускается.
Средство 5 управления включает в себя блок 11 вычисления инструкций управления напряжением возбуждения, генератор 12 напряжения оценки положения, первый преобразователь 15 координат, двухфазный/трехфазный преобразователь 16 и сумматор 23d. Блок 11 вычисления инструкций управления напряжением возбуждения включает в себя два модуля 13d и 13q вычитания, контроллер 14d тока d-оси, контроллер 14q тока q-оси, второй преобразователь 17 координат и трехфазный/двухфазный преобразователь 18. В этом случае конфигурации модулей 13d и 13q вычитания, контроллера 14d тока d-оси, контроллера 14q тока q-оси, второго преобразователя 17 координат и трехфазного/двухфазного преобразователя 18 являются идентичными конфигурациям в варианте 1 осуществления. Следовательно, их описание здесь опускается.
Особенность средства 5 управления варианта 3 осуществления заключается в том, что для того, чтобы оценивать положение ротора электрической вращающейся машины 1, генератор 12 напряжения оценки положения выводит инструкцию Vdh управления напряжением оценки положения, имеющую частоту, отличающуюся от частоты инструкции Vd* управления напряжением возбуждения, выводимой из блока 11 вычисления инструкций управления напряжением возбуждения. В этом случае инструкция Vdh управления напряжением оценки положения может иметь любой тип до тех пор, пока ее частота отличается от частоты инструкции Vd* управления напряжением возбуждения. В варианте 3 осуществления так называемое переменное напряжение используется в качестве инструкции управления напряжением оценки положения.
Сумматор 23d предоставляется между выходной стороной контроллера 14d тока d-оси блока 11 вычисления инструкций управления напряжением возбуждения и первым преобразователем 15 координат. Сумматор 23d суммирует инструкцию Vdh управления напряжением оценки положения, выводимую из генератора 12 напряжения оценки положения, с выходной инструкцией Vd* управления напряжением возбуждения, выводимой из контроллера 14d тока d-оси. Затем инструкция Vdp* управления напряжением, которая является результирующим сигналом, полученным посредством сложения, и инструкция Vq* управления напряжением возбуждения, выводимая из контроллера 14q тока q-оси, предоставляются в первый преобразователь 15 координат.
Первый преобразователь 15 координат преобразует сигнал Vdp* инструкции, выводимый из сумматора 23d, и инструкцию Vq* управления напряжением возбуждения для q-оси в инструкции Vα* и Vβ* управления напряжением на двух осях (α-β-осях) в состоянии покоя соответственно. Двухфазный/трехфазный преобразователь 16 преобразует инструкции Va* и Vp* управления напряжением, предоставленные первым преобразователем 15 координат, в инструкции Vup*, Vvp* и Vwp* управления напряжением возбуждения в системе координат трехфазного переменного тока и выводит их в средство 3 приложения напряжения.
Средство 4 оценки положения включает в себя dm-qm-преобразователь 20, два модуля 6dm и 6qm извлечения тока, блок 7 вычисления амплитуд тока оценки положения и модуль 8 вычисления положения.
Dm-qm-преобразователь 20 преобразует токи iu, iv и iw электрической вращающейся машины, детектируемые средством 2 детектирования тока, в ток idm dm-оси и ток iqm qm-оси в системе dm-qm-координат, отличающейся на 45 градусов от двух осей вращения (d-q-оси), синхронных с оцененным положением θL, выводимым из модуля 8 вычисления положения, описанного ниже, и выводит ток idm dm-оси и ток iqm qm-оси.
Модули 6dm и 6qm извлечения тока извлекают токи idmh и iqmh оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкции Vdh управления напряжением оценки положения, выводимой из генератора 12 напряжения оценки положения, из тока idm dm-оси и тока iqm qm-оси, выводимого из dm-qm-преобразователя 20, соответственно. В частности, как в варианте 1 осуществления, токи idmh и iqmh оценки положения извлекаются посредством использования полосового фильтра, или частотные составляющие тока idm dm-оси и тока iqm qm-оси, которые являются идентичными частотным составляющим инструкции Vdh управления напряжением оценки положения, ослабляются посредством ввода тока idm dm-оси и тока iqm qm-оси в режекторный фильтр, и результирующие токи, которые прошли через режекторный фильтр, вычитаются из тока idm dm-оси и тока iqm qm-оси, соответственно, посредством чего извлекаются токи idmh и iqmh оценки положения.
Блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Idmh и Iqmh тока оценки положения посредством использования только квадратов токов idmh и iqmh оценки положения, предоставленных посредством модулей 6dm и 6qm извлечения тока, без использования преобразования Фурье. В частности, как в обработке посредством блока 7 вычисления амплитуд тока оценки положения варианта 1 осуществления, на основе выражения (7) умножители 9dm и 9qm возводят в квадрат токи idmh и iqmh оценки положения, чтобы вычислять их автокорреляции; модули 10dm и 10qm интегрирования интегрируют возведенные в квадрат токи оценки положения и умножают результирующие значения на (2/Tn); и затем модули 22dm и 22qm вычисления квадратного корня вычисляют квадратные корни результирующих значений, которые должны выводиться и посредством которых вычисляются амплитуды Idmh и Iqmh тока оценки положения.
Как показано на фиг, 9, модуль 8 вычисления положения, например, посредством использования известной технологии, раскрытой в вышеописанном непатентном документе 1, вычисляет отклонения амплитуд Idmh и Iqmh тока оценки положения, вычисляет оцененную скорость посредством выполнения PI-регулирования так, что отклонения становятся равными нулю, косвенно вычисляет оцененное положение θL посредством интегрирования оцененной скорости и затем выводит оцененное положение θL.
Как описано выше, в варианте 3 осуществления конфигурация блока 7 вычисления амплитуд тока оценки положения является такой, что автокорреляции, полученные посредством возведения в квадрат токов оценки положения idmh и iqmh, используются для вычисления амплитуд Idmh и Iqmh тока оценки положения. Следовательно, необязательно подготавливать синусоидальную функцию и косинусоидальную функцию заранее, как в случае выполнения преобразования Фурье. Следовательно, объем вычислений и запоминающего устройства может быть в значительной степени уменьшен.
Помимо этого, в случае выполнения преобразования Фурье, то, какая из составляющей косинусоидальной функции и составляющей синусоидальной функции включается в сигнал, амплитуда которого вычислена, и то, какая величина этой составляющей включается в сигнал, является неизвестным. Следовательно, две функции из косинусоидальной функции и синусоидальной функции должны использоваться в качестве корреляционных функций. С другой стороны, в варианте 3 осуществления, поскольку блок 7 вычисления амплитуд тока оценки положения использует автокорреляции, только сигнал, амплитуда которого должна вычисляться, необходим в качестве корреляционной функции, на которую должен умножаться сигнал. Следовательно, число умножений может быть сокращено на 1 по сравнению со случаем выполнения преобразования Фурье. Также в этом отношении объем вычислений может быть уменьшен по сравнению со случаем выполнения преобразования Фурье.
Следует отметить, что вариант 3 осуществления может модифицироваться следующим образом. А именно, хотя в средстве 4 оценки положения, показанном на фиг.8, модули 6dm и 6qm извлечения тока предоставляются на следующей стадии dm-qm-преобразователя 20, порядок операций может быть изменен на противоположный следующим образом. Во-первых, модули извлечения тока могут извлекать токи, имеющие частотные составляющие, идентичные частотным составляющим инструкции Vdh управления напряжением оценки положения, из токов iu, iv и iw электрической вращающейся машины, и dm-qm-преобразователь 20 на следующей стадии может преобразовывать извлеченные токи в токи в системе dm-qm-координат, отличающейся на 45 градусов от двух осей вращения, вращающихся синхронно с оцененным положением θL, посредством чего могут извлекаться токи idmh и iqmh оценки положения.
Помимо этого, как показано на фиг.10, в блоке 7 вычисления амплитуд тока оценки положения умножители 9dm и 9qm могут возводить в квадрат токи idmh и iqmh оценки положения, чтобы вычислять их автокорреляции, и возведенные в квадрат токи оценки положения могут вводиться в фильтры 19dm и 19qm нижних частот, соответственно, посредством которых амплитуды Idmh и Iqmh тока оценки положения могут вычисляться, как в варианте 2 осуществления (фиг.6).
Вариант 4 осуществления
Фиг.11 изображает схему конфигурации устройства управления для электрической вращающейся машины согласно варианту 4 осуществления настоящего изобретения. Составляющие, которые соответствуют или являются идентичными составляющим в варианте 3 осуществления, показанном на фиг.8, обозначаются посредством идентичных ссылок с номерами. Следует отметить, что на фиг.11 конфигурации, помимо конфигурации средства 4 оценки положения, являются идентичными конфигурациям в варианте 3 осуществления (фиг.8). Следовательно, описание конфигураций, помимо конфигурации средства 4 оценки положения, здесь опускается.
Средство 4 оценки положения включает в себя третий преобразователь 21 координат, два модуля 6d и 6q извлечения тока, блок 7 вычисления амплитуд тока оценки положения и модуль 8 вычисления положения.
Третий преобразователь 21 координат преобразует токи iu, iv и iw электрической вращающейся машины, детектируемые средством 2 детектирования тока, в ток id d-оси и ток iq d-оси в системе d-q-координат, сформированной посредством двух осей вращения, вращающихся синхронно с оцененным положением θL, выводимым из модуля 8 вычисления положения, и выводит ток id d-оси и ток iq d-оси.
Модули 6d и 6q извлечения тока извлекают токи idh и iqh оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкции Vdh управления напряжением оценки положения, выводимой из генератора 12 напряжения оценки положения, из токов id и iq, выводимых из третьего преобразователя 21 координат, соответственно. В частности, как в варианте 3 осуществления, токи idh и iqh оценки положения извлекаются посредством использования полосового фильтра, или частотные составляющие тока id d-оси и тока iq d-оси, которые являются идентичными частотным составляющим инструкции Vdh управления напряжением оценки положения, ослабляются посредством ввода тока id d-оси и тока iq d-оси в режекторный фильтр, и результирующие токи, которые прошли через режекторный фильтр, вычитаются из тока id d-оси и тока iq d-оси, соответственно, посредством чего извлекаются токи idh и iqh оценки положения.
Блок 7 вычисления амплитуд тока оценки положения вычисляет амплитуды Idh и Iqh тока оценки положения посредством использования только квадратов токов idh и iqh оценки положения, предоставленных посредством модулей 6d и 6q извлечения тока, без использования преобразования Фурье. В частности, как в обработке посредством блока 7 вычисления амплитуд тока оценки положения варианта 1 или 3 осуществления, на основе выражения (7) умножители 9d и 9q возводят в квадрат токи idh и iqh оценки положения, чтобы вычислять их автокорреляции; модули 10d и 10q интегрирования интегрируют возведенные в квадрат токи оценки положения и умножают результирующие значения на (2/Tn); и затем модули 22d и 22q вычисления квадратного корня вычисляют квадратные корни результирующих значений, которые должны выводиться, и посредством которых вычисляются амплитуды Idh и Iqh тока оценки положения.
Модуль 8 вычисления положения выводит оцененное положение θL посредством использования известной технологии (например, технологии, раскрытой в публикации патента № 3312472). Таким образом, в случае если сумматор 23d суммирует инструкцию Vdh управления напряжением оценки положения (Vdh=Vh sin ωht), выводимую из генератора 12 напряжения оценки положения, с инструкцией управления Vd* напряжением d-оси, уравнение состояния токов idh и iqh оценки положения, полученных посредством модулей 6d и 6q извлечения тока, представляется посредством выражения (15).

где 
Интегрирование обеих сторон выражения (15) дает в результате выражение (16).

Следовательно, амплитуды Idh и Iqh тока оценки положения, выводимые из блока 7 вычисления амплитуд тока оценки положения, представляются посредством выражения (17).

Здесь выражение (17) включает в себя информацию θ положения электрической вращающейся машины 1. Следовательно, положение вращающейся электрической машины 1 может быть оценено посредством использования амплитуд Idh и Iqh тока оценки положения. Например, когда оцененное положение θL должно вычисляться посредством использования амплитуды Iqh тока оценки положения, если Lo и L2 являются известными, допускается Lo2>>L22, и Δ задается как Δ=Lo2, оцененное положение θL электрической вращающейся машины 1 может вычисляться посредством деления амплитуды Iqh тока оценки положения на {-Vh•L2/(ωh•Lo2)} и умножения арксинуса результирующего значения на 1/2.

Как описано выше, в варианте 4 осуществления конфигурация блока 7 вычисления амплитуд тока оценки положения является такой, что автокорреляции, полученные посредством возведения в квадрат токов idh и iqh оценки положения, используются для вычисления амплитуд Idh и Iqh тока оценки положения. Следовательно, необязательно подготавливать синусоидальную функцию и косинусоидальную функцию заранее, как в случае выполнения преобразования Фурье. Следовательно, объем вычислений и запоминающего устройства может быть в значительной степени уменьшен.
Помимо этого, в случае выполнения преобразования Фурье, то, какая из составляющей косинусоидальной функции и составляющей синусоидальной функции включается в сигнал, амплитуда которого вычислена, и то, какая величина этой составляющей включается в сигнал, является неизвестным. Следовательно, две функции из косинусоидальной функции и синусоидальной функции должны использоваться в качестве корреляционных функций. С другой стороны, в варианте 4 осуществления, поскольку блок 7 вычисления амплитуд тока оценки положения использует автокорреляции, только сигнал, амплитуда которого должна вычисляться, необходим в качестве корреляционной функции, на которую должен умножаться сигнал. Следовательно, число умножений может быть сокращено на 1 по сравнению со случаем выполнения преобразования Фурье. Также в этом отношении объем вычислений может быть уменьшен по сравнению со случаем выполнения преобразования Фурье.
Следует отметить, что вариант 4 осуществления может модифицироваться следующим образом.
Таким образом, хотя в средстве 4 оценки положения, показанном на фиг.11, модули 6d и 6q извлечения тока предоставляются на следующей стадии третьего преобразователя 21 координат, порядок операций может быть изменен на противоположный следующим образом. Во-первых, модули извлечения тока могут извлекать токи, имеющие частотные составляющие, идентичные частотным составляющим инструкции Vdh управления напряжением оценки положения, из токов iu, iv и iw электрической вращающейся машины, и третий преобразователь 21 координат на следующей стадии может преобразовывать извлеченные токи в токи в системе d-q-координат, сформированной посредством двух осей вращения, вращающихся синхронно с оцененным положением θL, посредством чего могут извлекаться токи idh и iqh оценки положения. Здесь ток id d-оси и ток iq d-оси, выводимые из второго преобразователя 17 координат средства 5 управления, могут использоваться в качестве тока id d-оси и тока iq d-оси, которые должны вводиться в модули 6d и 6q извлечения тока. В этом случае третий преобразователь 21 координат может опускаться.
Помимо этого, как показано на фиг.12, в блоке 7 вычисления амплитуд тока оценки положения, умножители 9d и 9q могут возводить в квадрат токи idh и iqh оценки положения, чтобы вычислять их автокорреляции, и возведенные в квадрат токи оценки положения могут вводиться в фильтры 19d и 19q нижних частот, соответственно, посредством которых амплитуды Idh и Iqh тока оценки положения могут вычисляться, как в варианте 2 осуществления (фиг.6).
Промышленная применимость
В вариантах 1-4 осуществления синхронная машина с встроенным магнитом используется в качестве электрической вращающейся машины 1. Тем не менее настоящее изобретение не ограничено этим. Настоящее изобретение также является применимым к синхронным машинам других типов, к примеру, синхронно-реактивным, посредством чего становится возможным выполнять управление вращением, при котором информация положения ротора точно определяется без использования датчика положения вращения и без выполнения преобразования Фурье.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2577529C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2576246C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА СИГНАЛОВ ОТ ВАЛА ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2518597C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2010 |
|
RU2566301C2 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОРОМ | 2011 |
|
RU2578165C2 |
| Способ управления устройствами посредством обработки сигналов ЭЭГ | 2019 |
|
RU2717213C1 |







Изобретение относится к области электротехники и может быть использовано для управления асинхронной и синхронной машинами в отсутствие датчика положения вращения. В устройстве управления и способе управления вращающейся электрической машиной средство (5) управления для вывода команды управления напряжением для управления возбуждением вращающейся электрической машины (1) суммирует команду управления напряжением оценки положения, которая формируется в генераторе (12) напряжения оценки положения и используется для оценки положения ротора, с командой управления напряжением возбуждения в сумматорах (23u-23w) и выводит в качестве команды управления напряжением. Средство (4) оценки положения содержит: модули (6u-6w) извлечения тока для извлечения тока оценки положения, имеющего частотную составляющую, идентичную частотной составляющей команды управления напряжением оценки положения, из тока вращающейся электрической машины, детектируемого средством (2) детектирования тока; модуль (7) вычисления амплитуд тока оценки положения для вычисления амплитуды тока оценки положения из тока оценки положения; и модуль (8) вычисления оцененного положения для вычисления оцененного положения вращающейся электрической машины (1) на основе амплитуды тока оценки положения. Модуль (7) вычисления амплитуд тока оценки положения вычисляет амплитуду тока оценки положения на основе значения автокорреляции, полученного посредством возведения в квадрат тока оценки положения. 3 н. и 5 з.п. ф-лы, 12 ил.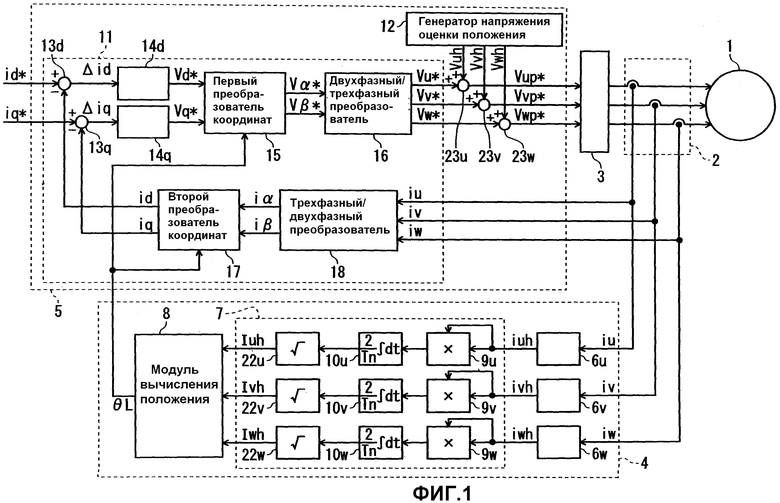
1. Устройство управления для электрической вращающейся машины, которое выполняет управление возбуждением электрической вращающейся машины, содержащее:
средство детектирования тока для детектирования токов электрической вращающейся машины, протекающих в электрической вращающейся машине;
средство оценки положения для оценки положения ротора электрической вращающейся машины на основе токов электрической вращающейся машины, детектируемых средством детектирования тока;
средство управления для вывода инструкций управления напряжением на основе токов электрической вращающейся машины, детектируемых средством детектирования тока, и информации о положении ротора, оцениваемой средством оценки положения; и
средство приложения напряжения для приложения напряжения для управления возбуждением к электрической вращающейся машине на основе инструкций управления напряжением, выводимых из средства управления;
причем средство управления включает в себя блок вычисления инструкций управления напряжением возбуждения для вычисления инструкций управления напряжением возбуждения для возбуждения электрической вращающейся машины,
средство управления включает в себя генератор напряжения оценки положения для вывода инструкций управления напряжением оценки положения для оценки положения ротора электрической вращающейся машины, и
средство управления включает в себя сумматоры для суммирования инструкций управления напряжением оценки положения с инструкциями управления напряжением возбуждения и вывода результирующих сигналов в качестве инструкций управления напряжением в средство приложения напряжения;
средство оценки положения включает в себя модули извлечения тока для извлечения токов оценки положения, имеющих частотные составляющие, идентичные частотным составляющим инструкций управления напряжением оценки положения, включенных в токи электрической вращающейся машины, детектируемые средством детектирования тока,
средство оценки положения включает в себя блок вычисления амплитуд тока оценки положения для вычисления амплитуд тока оценки положения на основе токов оценки положения, извлеченных посредством модулей извлечения тока, и
средство оценки положения включает в себя модуль вычисления положения для выполнения вычисления оценки положения ротора электрической вращающейся машины на основе амплитуд тока оценки положения, вычисляемых блоком вычисления амплитуд тока оценки положения; и
блок вычисления амплитуд тока оценки положения вычисляет амплитуды тока оценки положения посредством интегрирования квадратов токов оценки положения за интервал не меньше полупериода токов оценки положения.
2. Устройство управления для электрической вращающейся машины по п.1, в котором:
блок вычисления амплитуд тока оценки положения интегрирует квадраты токов оценки положения за интервал не меньше полупериода токов оценки положения и вычисляет квадратный корень значения, полученного посредством деления интегрированного значения на половину интервала интегрирования, посредством чего могут быть вычислены амплитуды тока оценки положения.
3. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором:
генератор напряжения оценки положения формирует инструкции управления напряжением оценки положения на основе трехфазного равновесия.
4. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором:
генератор напряжения оценки положения формирует инструкции управления напряжением оценки положения в направлении d-оси ортогональной системы d-q-координат, вращающейся синхронно с ротором электрической вращающейся машины или вектором магнитного потока,
средство оценки положения включает в себя dm-qm-преобразователь для выполнения преобразования координат для токов электрической вращающейся машины, детектируемых средством детектирования тока, чтобы получать ток dm-оси и ток qm-оси в системе dm-qm-координат, отличающейся на 45° от ортогональной системы d-q-координат, и
модули извлечения тока извлекают токи оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкций управления напряжением оценки положения, на основе тока dm-оси и тока qm-оси, полученных посредством преобразования координат dm-qm-преобразователями.
5. Устройство управления для электрической вращающейся машины по п.1 или 2, в котором:
генератор напряжения оценки положения формирует инструкции управления напряжением оценки положения, которое является переменным напряжением,
средство оценки положения включает в себя преобразователь координат для выполнения преобразования координат для токов электрической вращающейся машины, детектируемых средством детектирования тока, чтобы получать ток параллельной составляющей, которая является составляющей, параллельной инструкциям управления напряжением оценки положения, и ток ортогональной составляющей, которая является составляющей, ортогональной инструкциям управления напряжением оценки положения, и
модули извлечения тока извлекают токи оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкций управления напряжением оценки положения, на основе тока параллельной составляющей и тока ортогональной составляющей, полученных посредством преобразования координат преобразователем координат.
6. Способ управления для выполнения управления возбуждением электрической вращающейся машины, содержащий:
этап, на котором суммируют инструкции управления напряжением оценки положения для оценки положения ротора электрической вращающейся машины с инструкциями управления напряжением возбуждения для возбуждения электрической вращающейся машины;
этап, на котором детектируют токи электрической вращающейся машины, протекающие в электрической вращающейся машине наряду с возбуждением электрической вращающейся машины, на основе сигналов, получаемых посредством сложения;
этап, на котором извлекают токи оценки положения, имеющие частотные составляющие, идентичные частотным составляющим инструкций управления напряжением оценки положения, включенных в детектированные токи электрической вращающейся машины;
этап, на котором вычисляют амплитуды тока оценки положения посредством интегрирования квадратов извлеченных токов оценки положения на интервале не меньше интервала, кратного m (m является положительным целым числом) полупериода токов оценки положения;
этап, на котором выполняют вычисление оценки положения ротора электрической вращающейся машины на основе вычисленных амплитуд тока оценки положения; и
этап, на котором выполняют коррекцию по обратной связи для инструкций управления напряжением возбуждения на основе информации об оцененном положении ротора и значений токов электрической вращающейся машины.
7. Устройство управления для электрической вращающейся машины, которое выполняет управление возбуждением электрической вращающейся машины, содержащее:
средство детектирования тока для детектирования токов электрической вращающейся машины, протекающих в электрической вращающейся машине;
средство оценки положения для оценки положения ротора электрической вращающейся машины на основе токов электрической вращающейся машины, детектируемых средством детектирования тока;
средство управления для вывода инструкций управления напряжением на основе токов электрической вращающейся машины, детектируемых средством детектирования тока, и информации о положении ротора, оцениваемой средством оценки положения; и
средство приложения напряжения для приложения напряжения для управления возбуждением к электрической вращающейся машине на основе инструкций управления напряжением, выводимых из средства управления;
причем средство управления включает в себя блок вычисления инструкций управления напряжением возбуждения для вычисления инструкций управления напряжением возбуждения для возбуждения электрической вращающейся машины,
средство управления включает в себя генератор напряжения оценки положения для вывода инструкций управления напряжением оценки положения для оценки положения ротора электрической вращающейся машины, и
средство управления включает в себя сумматоры для суммирования инструкций управления напряжением оценки положения с инструкциями управления напряжением возбуждения и вывода результирующих сигналов в качестве инструкции управления напряжением в средство приложения напряжения;
средство оценки положения включает в себя модули извлечения тока для извлечения токов оценки положения, имеющих частотные составляющие, идентичные частотным составляющим инструкций управления напряжением оценки положения, включенных в токи электрической вращающейся машины, детектируемые средством детектирования тока,
средство оценки положения включает в себя блок вычисления амплитуд тока оценки положения для вычисления амплитуд тока оценки положения на основе токов оценки положения, извлеченных посредством модулей извлечения тока, и
средство оценки положения включает в себя модуль вычисления положения для выполнения вычисления оценки положения ротора электрической вращающейся машины на основе амплитуд тока оценки положения, вычисляемых посредством блока вычисления амплитуд тока оценки положения;
генератор напряжения оценки положения формирует инструкции управления напряжением оценки положения, имеющие частоты, по меньшей мере, не менее чем двух видов, чтобы оценивать положение ротора электрической вращающейся машины;
блок вычисления амплитуд тока оценки положения вычисляет амплитуды тока оценки положения на основе сигналов, которые прошли через фильтры нижних частот, которые дают возможность прохождения низкочастотных составляющих квадратов токов оценки положения.
8. Устройство управления для электрической вращающейся машины по п.7, в котором:
частоты отсечки фильтров нижних частот блока вычисления амплитуд тока оценки положения не превышают частоты токов оценки положения и не менее чем в два раза превышают частоты инструкций управления напряжением возбуждения.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| ТУРБИНА ВНУТРЕННЕГО ГОРЕНИЯ | 1925 |
|
SU4373A1 |
| JP 2001069799 A, 16.03.2001 | |||
| JP 2006109589 A, 20.04.2006 | |||
| JP 2004320985 A, 11.11.2004 | |||
| US 6768280 B2, 27.07.2004 | |||
| Многоканальный фотометр | 1987 |
|
SU1492224A1 |
| EP 1959553 A1, 20.08.2008. | |||

