ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет по предварительной заявке США №62/530420, поданной 10 июля 2017 г., озаглавленной «Нормализация распределения натяжения и минимизация истирания боковых стенок в угловых ременных системах привода», которая включена сюда путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способам и системам передачи мощности на ременной основе.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
Плоские ремни с открытым концом используются для передачи мощности в колебательных линейных применениях, таких как подъемники, вилочные погрузчики и ножничные подъемники. Инновации в конструкции материала плоских ремней привели к улучшению характеристик ремней. Эти ремни имеют много преимуществ по сравнению с проволочными канатами, включая не обслуживаемую эксплуатацию для продолжительного срока службы, низкую стоимость изготовления и небольшую среду проектирования, устанавливающую набор рабочих нагрузок.
Является обычной практикой проявлять большую осторожность при применении плоских ремней, так как неправильное размещение или выравнивание шкивов может привести к преждевременному (и потенциально катастрофическому) разрушению ремня. Плоские ремни являются более чувствительными к перекосу шкивов, чем проволочные тросы. Обычно плоские ремни (то есть ремни без зубьев) не предназначены для искривленной геометрии. В качестве конкретного примера, угол наклона в 0,25 градуса сокращает срок службы стального троса на заметную долю, возможно, сокращая срок службы на 15%. Проволочный трос должен изгибаться поперек кромки, чтобы соответствовать требуемому углу выхода, но он полностью способен изгибаться в этом направлении.
Плоские ремни, с другой стороны, являются достаточно жесткими в направлении, ортогональном их главной оси сгибания, и в результате тот же самый угол наклона в 0,25 градуса может сократить срок службы плоского полиуретанового ремня, армированного стальным тросом, на 95% или больше.
Другим явным преимуществом проволочных тросов над плоскими ремнями является их способность изгибаться в любом направлении. Это позволяет конструктору размещать шкивы вне плоскости друг с другом, позволяя им создавать гораздо более сложные расположения шкивов, которые обеспечивают расширенные функциональные возможности. Ремни также могут быть выполнены с не лежащими в плоскости шкивами, хотя размещение и расположение шкивов более ограничено, чем размещение и расположение проволочного троса. Если ремень должен быть перекручен в свободном промежутке между двумя шкивами, этот промежуток должен соответствовать определенной установленной минимальной длине в общей инженерной практике. Для перекручивания на 90 градусов этот промежуток обычно рекомендуется, как минимум, в 20 раз больше ширины ремня. Этот показатель обычно называют «коэффициентом перекручивания»: длина свободного промежутка, деленная на ширину ремня, для перекручивания на 90 градусов. В качестве примера рассмотрим ремень шириной 20 мм, свободный промежуток 300 мм, и перекручивание на 45 градусов. Тогда для этого промежутка коэффициент перекручивания будет 30:1. Перекручивания, которые являются более агрессивными, чем 20:1, обычно не рекомендуются в инженерной практике, потому что дополнительное преимущество компактности, которое может дать более плотное перекручивание, сопровождается серьезным сокращением срока службы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В данном документе раскрыты способы, системы и компоненты для проектирования угловых приводных систем с плоским ремнем, которые содержат агрессивную геометрию перекручивания с незначительным сокращением срока службы по сравнению с не перекрученными геометриями. Используя эти способы, некоторые реализации достигают таких коэффициентов перекручивания, как 7:1, например, с минимальными затратами на срок службы, тем самым делая более компактные конструкторские формы.
Правильная методика проектирования для реализации таких коэффициентов перекручивания вытекает из фундаментального понимания режимов разрушения плоских ремней, подверженных как углам наклона, так и геометриям перекручивания на границе раздела шкивов. В случае прямого (не перекрученного) плоского ремня, подверженного значительному углу наклона, преобладают три режима разрушения: истирание боковой стенки оболочки ремня вдоль кромки, препятствующее перемещению ремня в нейтральное положение вдоль шкива, натяжение, основанное на разрушении сгиба или усталостном разрушении проволок, которые находятся напротив края контакта боковой стенки, и преждевременное разрушение оболочки под проволочными тросами, которые подвергаются более высокому натяжению. Стоит отметить, что эти три условия происходят согласованно: Смещенный шкив будет смещать распределение натяжения в ремне, вызывая более высокое натяжение ремня и, как следствие, давление шкива в «высоком углу» шкива. Неравномерное распределение давления является движущей силой, переставляющей ремень перемещаться в нейтральное положение на цилиндрическом барабане без фланцев. Однако если фланец присутствует, он будет противодействовать распределению результирующего давления на ремне с контактом вдоль боковой стенки ремня напротив высокого натяжения. Таким образом, состояние угла наклона является трижды пагубным, вызывая чрезмерное натяжение на боковой стенке оболочки ремня, армирующих прядей, и материале оболочки между поверхностью шкива и прядями на стороне высокого натяжения ремня.
Подчинение свободного промежутка ремня между двумя шкивами искривленной геометрии углового привода также вызывает чрезмерное натяжение в ремне через ряд механизмов. Во-первых, перекручивание любой геометрии армированного плоского ремня приводит к смещению натяжения к самым внешним прядям, по существу, в параболическом плюсе с постоянным распределением. Это связано с более длинной спиральной траекторией, по которой должны проходить внешние пряди по сравнению с прядями, находящими рядом с центром ремня. Однако в зависимости от материалов и геометрии это неравенство натяжения может быть незначительным.
На практике, перекрученные плоские ремни из армированной сталью полиуретановой конструкции, выходят из строя из-за взаимодействия шкива задолго до того, как они достигают усталости при изгибе, растяжении или натяжении перекручивания, связанном с изгибом самого ремня. Чтобы понять это, мы должны учитывать, что перекрученный плоский ремень несет общий момент перекручивания в дополнение к его растягивающей нагрузке. Это можно легко увидеть по любому разрезу участка свободного тела перекрученного промежутка ремня: Векторы натяжения внешних прядей являются не параллельными центральной оси, так как они следуют по спиральной траектории их соответствующих проволочных тросов. Один раз интегрированная поперек прядей для достижения результирующих нагрузок на ремень, не параллельность отдельных векторов натяжения приводит к вышеупомянутому моменту перекручивания, который проходит через перекрученный ремень во всех точках свободного промежутка.
Этот момент перекручивания, который проходит через свободный промежуток ремня, должен подаваться опорными органами на любом конце свободного промежутка, будь то шкивы или оконечная нагрузка. Если представить себе пару шкивов, состоящих из двух цилиндрических роликов, прижимающих обе стороны ремня, давление на поверхности противоположных роликов обеспечивает контакт, необходимый для придания момента перекручивания ремню приятно симметричным образом. Затем основной шкив свободно обеспечивает давление перенаправления на плоский ремень стандартным образом. В этой ситуации следует ожидать сокращения срока службы, связанного только с натяжениями, вызванными самой перекрученной геометрией, которые являются незначительными.
Однако большинство конструкций шкивов не имеют противоположного ролика, единственная цель которого состоит в том, чтобы помочь обеспечить момент перекручивания, проходящий через промежуток. Поскольку основной шкив может прикладывать давление только к нижней поверхности ремня, он должен достигать момента перекручивания другими способами; а именно, боковое смещение в распределении давления к одной стороне шкива в сочетании с давлением основного шкива, которое удерживает ремень в контакте с поверхностью шкива. Этот сдвиг визуально различим (см. фиг. 5): Линия зацепления между ремнем и шкивом вращается от параллельной оси вращения шкива до косого угла. В результате ремень получает асимметричную опору от шкива, причем контакт на одном краю ремня происходит до контакта на другом крае, когда происходит зацепление ремня со шкивом. Это приводит к тому, что распределение натяжения внутри армирующих прядей ремня смещается в направлении края ремня, который первым получает контакт со шкивом, поскольку любое геометрическое наложение на ремень, которое удлиняет его армирующие пряди из их состояния свободного промежутка, приводит к более высокому состоянию натяжения в затронутых прядях. Неравномерное распределение натяжения в прядях вызывает реакцию давления боковой стенки на сторону ремня, противоположную состоянию высокого натяжения.
Соответственно, один аспект настоящего изобретения обеспечивает способы использования ремня для углового привода. Способы включают в себя применение перекрученной геометрии к первому свободному промежутку ремня, поддержание первого свободного промежутка ремня посредством свободно вращающегося шкива или ведомого шкива на первом конце первого свободного промежутка и по меньшей мере одного из позиционирования и ориентации вращающегося шкива или ведомого шкива с тем, чтобы сместить геометрическую осевую линию первого свободного промежутка ремня на заданный угол наклона относительно второго конца первого свободного промежутка.
Ремень представляет собой плоский ремень (то есть без зубьев). В некоторых вариантах реализации, плоский ремень представляет собой по меньшей мере одно из стального ремня, арамидного ремня, полиэфирного ремня, полиуретанового ремня, и ремней, армированных синтетическим волокном. В некоторых вариантах реализации, свободно вращающийся шкив или ведомый шкив включают в себя один или более шкивов с фланцами.
В некоторых вариантах реализации, направление и величина смещения заданного угла наклона первого свободного промежутка ремня является соизмеримой с таковой у нескрученного и смещенного второго свободного промежутка ремня с опорным шкивом, у которого полный перепад натяжения через нескрученный и смещенный второй свободный промежуток ремня от одного края к противоположному краю на границе зацепления нескрученного и смещенного второго свободного промежутка ремня, по существу, является противоположным полному перепаду натяжения от одного края до противоположного края первого свободного промежутка на границе зацепления первого свободного промежутка, имеющего перекрученную геометрию.
В некоторых вариантах реализации, первый свободный промежуток ремня включает в себя перекрученную геометрию, имеющую отношение перекручивания 20:1 или менее, и имеющую заданный угол наклона в диапазоне от 0,25 до 1,5 градусов.
В некоторых вариантах реализации, свободно вращающийся шкив или ведомый шкив включают в себя один или более шкивов, имеющих одно измерение введенного смещения угла наклона для первого свободного промежутка ремня, который имеет перекрученный вход на одной границе зацепления шкива и прямой выход на другой границе зацепления шкива.
В некоторых вариантах реализации, свободно вращающийся шкив или ведомый шкив включают в себя один или более шкивов, имеющих два измерения введенного смещения угла наклона для первого свободного промежутка ремня, который имеет перекрученный вход на одной границе зацепления шкива и прямой выход на другой границе зацепления шкива.
Другой аспект настоящего изобретения обеспечивает устройства для использования ремня для углового привода. Устройства включают в себя ремень, имеющий свободный промежуток, выполненный в перекрученную геометрию по меньшей мере один из свободно вращающегося шкива и ведомого шкива, поддерживающего первый конец свободного промежутка ремня, и узел опоры шкива, вмещающий свободно вращающийся шкив и/или ведомый шкив. Узел опоры шкива выполнен с возможностью позиционирования и/или ориентации свободно вращающегося шкива и/или ведомого шкива с тем, чтобы сместить геометрическую осевую линию свободного промежутка ремня на заданный угол наклона относительно стационарного шкива, расположенного на втором конце свободного промежутка ремня и удерживать свободно вращающийся шкив и/или ведомый шкив под заданным углом наклона для сохранения несоосности.
В некоторых вариантах реализации, узел опоры шкива выполнен с возможностью скольжения.
В некоторых вариантах реализации, стационарный шкив является ортогональным к свободно вращающемуся шкиву и/или ведомому шкиву.
Ремень представляет собой плоский ремень (то есть без зубьев). В некоторых вариантах реализации, плоский ремень представляет собой одно или более из стального ремня, арамидного ремня, полиэфирного ремня, или других ремней высокой производительности, армированных синтетическим волокном.
В некоторых вариантах реализации, свободно вращающийся шкив или ведомый шкив включают в себя один или более шкивов с фланцами. В некоторых вариантах реализации, перекрученная геометрия содержит агрессивное перекручивание с коэффициентом перекручивания 15:1 или ниже. В некоторых вариантах реализации, шкив с фланцем может быть расширен, чтобы включать в себя канавку для ремня, которая приблизительно на 1 мм шире, чем ремни (без зубьев), которые требуют направления фланцем.
Различные варианты осуществления настоящего изобретения помогают уменьшить величину асимметрии распределения натяжения прядей перекрученного промежутка ремня в угловом приводе, тем самым обеспечивая более компактные конструкции углового привода с сопоставимыми рабочими характеристиками и сроком службы для не перекрученных плоских ременных приводов. Одним из ключевых моментов, позволяющих реализовать изобретение, является наблюдение того, что как хорошо выровненные угловые приводы со значительным перекручиванием, так и прямые (не перекрученные) ременные приводы со значительным смещением в форме угла наклона имеют одинаковые структуры давления шкива, натяжения ремня и истирания боковой стенки, что приводит к преждевременному разрушению. Если проектировщик должен выбрать состояние угла наклона, у которого истирающая нагрузка на боковую стенку и неравномерное распределение натяжения отражают таковые для существующего перекрученного ременного углового привода, угол наклона может быть добавлен к иным образом хорошо выровненному угловому приводу, так что он нейтрализует нежелательные побочные эффекты неравномерного распределения натяжения и высокого истирания боковой стенки. Для заданного коэффициента перекручивания и сечения ремня существует дополнительный угол наклона, который позволяет значительно увеличить срок службы ремня путем повторной нормализации распределения натяжения в перекрученном ремне, который в противном случае сместился бы к одному краю. Изобретатель обнаружил, что эти дополнительные углы наклона часто бывают довольно значительными, иногда превышая 1 градус (угол наклона, настолько сильный, что он может быстро разрушить не перекрученный ремень в течение сотен циклов изгиба шкива, вместо достижения ожидаемых ~ миллионов циклов до отказа).
Хотя преднамеренное введение угла наклона в топологию ремня со свободными промежутками, которые являются прямыми или имеют относительно низкое перекручивание, может сократить срок службы ремня в 100 или более раз, этот же угол наклона может продлить срок службы агрессивно перекрученной геометрии ремня на тот же показатель 100 или более. Для коэффициентов перекручивания 15:1 или ниже при тестировании срока службы для дополнительных углов наклона от 0,25 до 1,5 градусов можно продлить срок службы перекрученного ремня более чем на два порядка.
Наиболее эффективный дополнительный угол наклона для перекрученного свободного промежутка ремня можно определить опытным путем, не прибегая к тестированию с высоким циклом. Если перекрученный участок проходит поверх шкива с фланцами с высокой скоростью (например, 7 Гц), боковая стенка, которая получает истирание от шкива, будет существенно нагреваться, и будет обнаруживаться с помощью тепловой камеры. Таким образом, можно получить эффективный дополнительный угол наклона, создавая установку, в которой угол наклона может быть различным, и изменяя его до тех пор, пока тепловая камера не перерегистрирует равномерное накопление тепла по ширине ремня. Можно также получить эффективный дополнительный угол наклона с чувствительной к давлению пленкой, помещая ее между шкивом и поверхностью ремня и считывая распределение цвета пленки после ее удаления. Естественно, этот процесс повторяется, увеличивая угол наклона, пока распределение натяжения не станет почти равномерным с минимальной разницей между краями ремня.
Варианты реализации настоящего изобретения предполагают, что как углы наклона, так и сильно перекрученная геометрия демонстрируют одинаковое влияние на распределение натяжения ремня и трибологию износа ремня, и что при соответствующем наложении этих условий, варианты осуществления могут использовать угловой привод с агрессивной геометрией перекручивания и намеренно разработанные дополнительные углы наклона, которые значительно увеличивают срок службы ремня.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Специалисту в данной области будет понятно, что чертеж в основном предназначен для иллюстративных целей и не предназначен для ограничения объема предмета изобретения, описанного в данном документе. Чертежи не обязательно выполнены в масштабе; в некоторых случаях различные аспекты предмета изобретения, раскрытого в данном документе, могут быть показаны преувеличенными или увеличенными на чертежах, чтобы облегчить понимание различных признаков. На чертежах, одинаковые ссылочные позиции обычно указывают на одинаковые, функционально аналогичные и/или структурно аналогичные элементы.
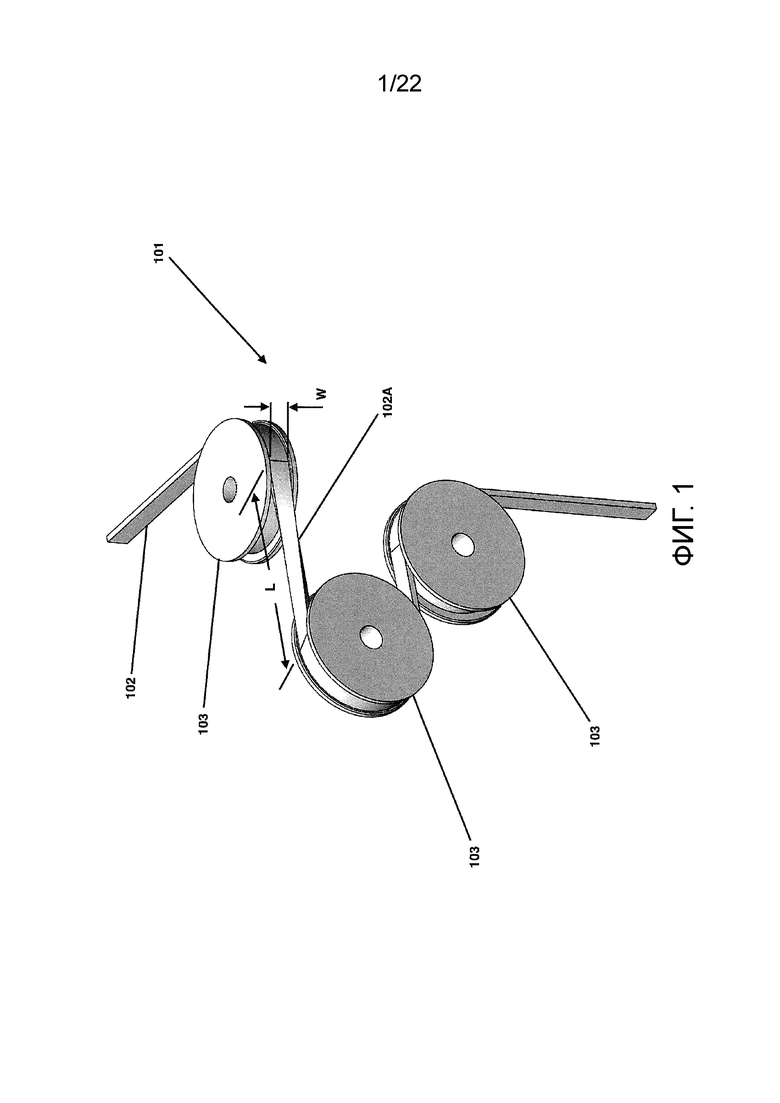
Фиг. 1 иллюстрирует некоторые элементы типового плоского ременного привода (предшествующий уровень техники).
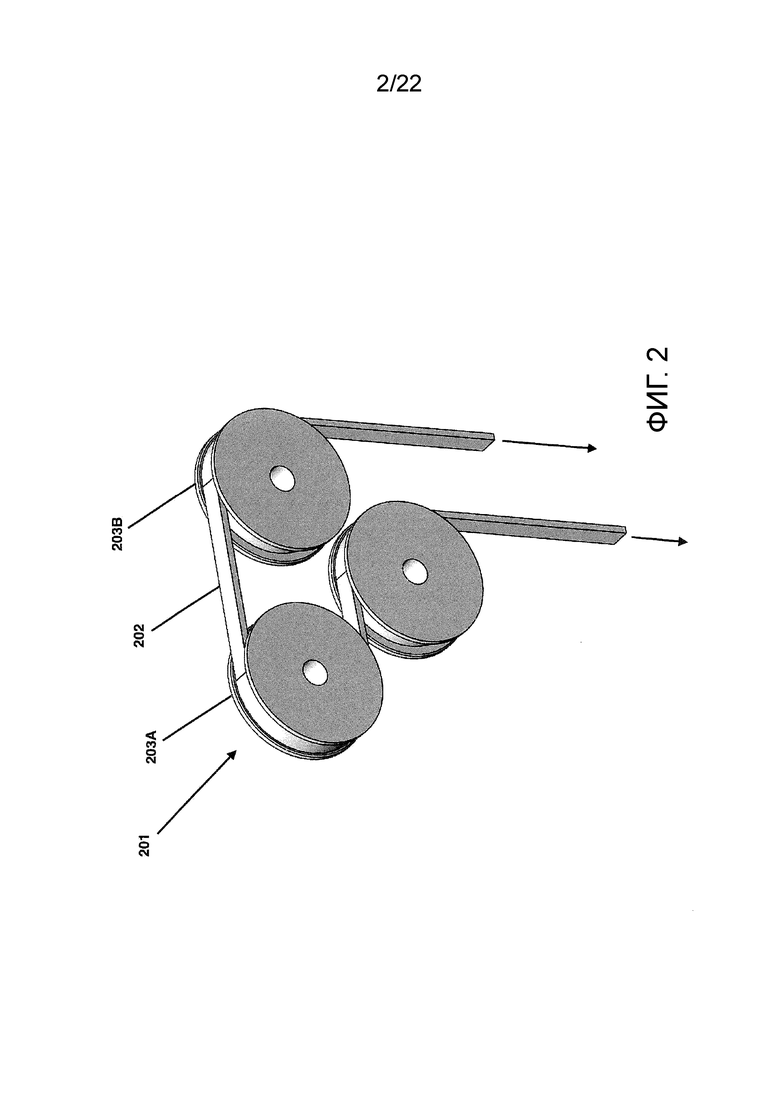
Фиг. 2 изображает систему плоского ременного привода со шкивами с фланцами, параллельными осями и параллельным смещением шкивов, которое вызывает угол наклона в свободном промежутке.
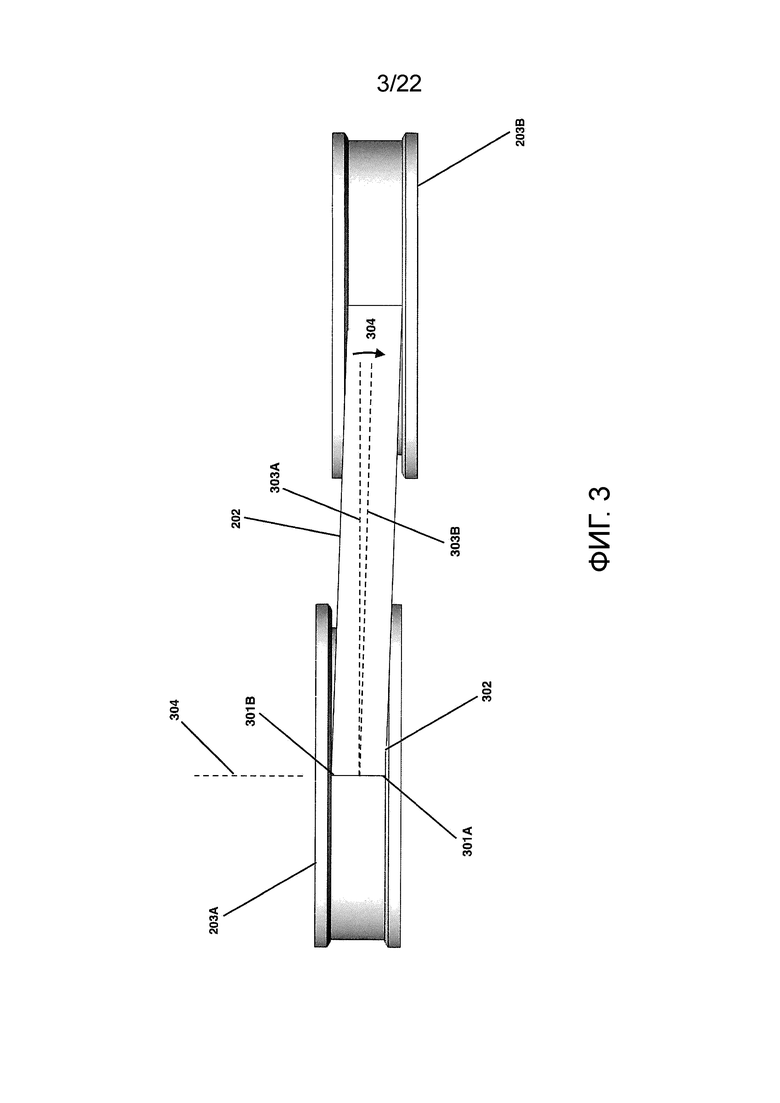
Фиг. 3 показывает вид сверху смещенного образца плоского ременного привода.
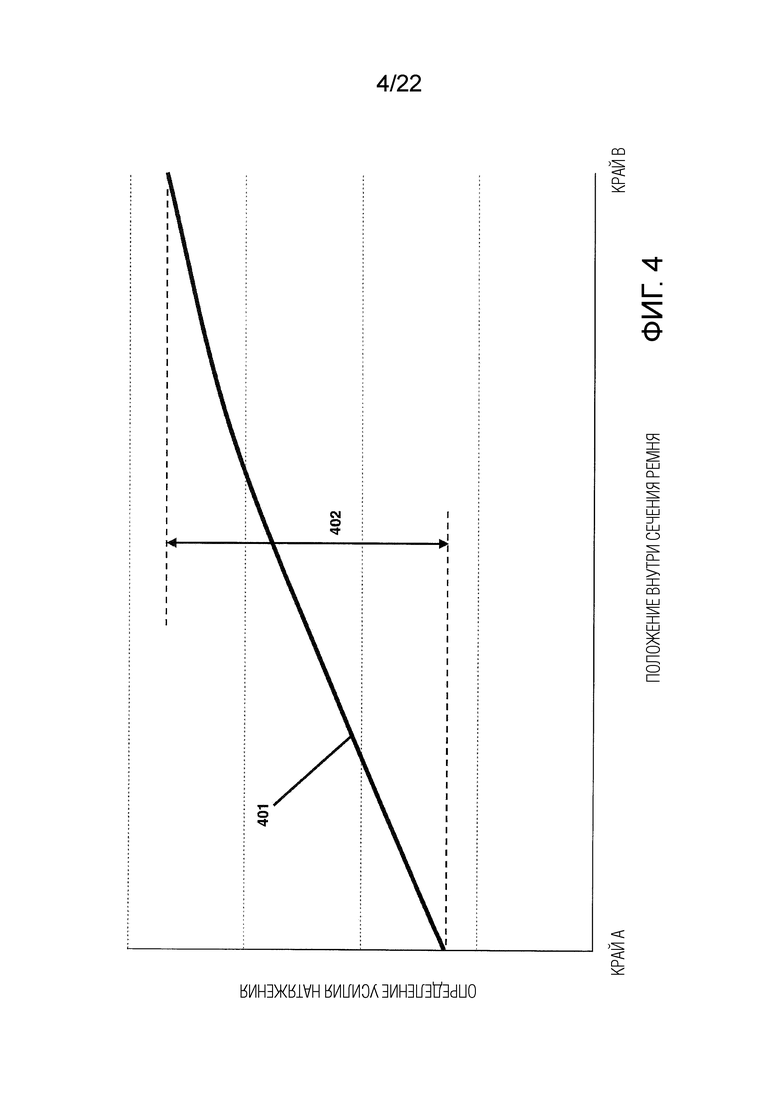
Фиг. 4 представляет собой пример иллюстрации распределения натяжения, видимого на границе зацепления шкива промежутком со значительным углом наклона.
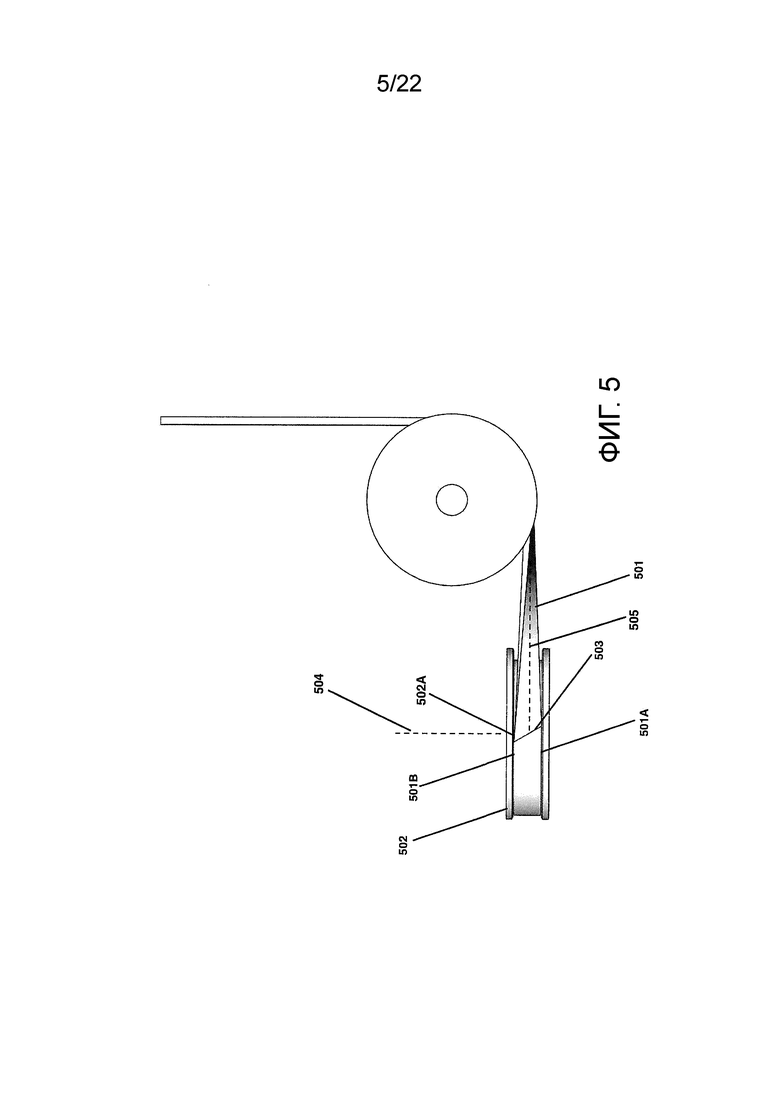
Фиг. 5 представляет вид сверху перекрученного свободного промежутка, который виден на фиг. 1.
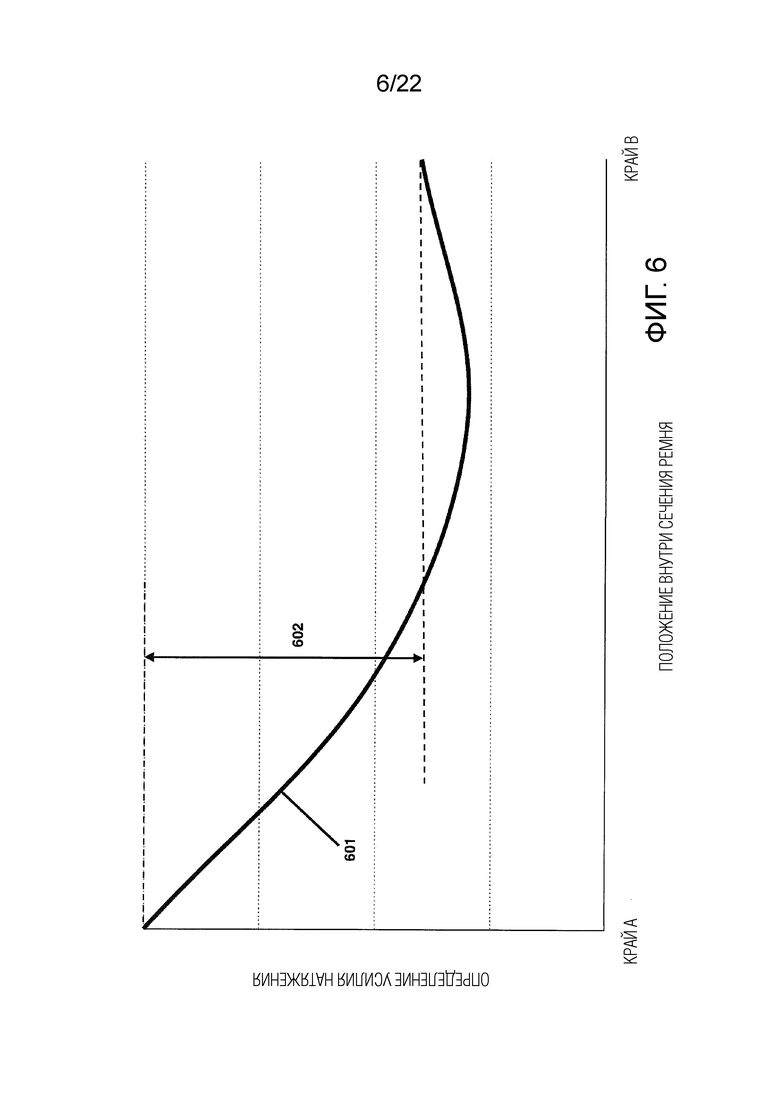
Фиг. 6 представляет собой пример иллюстрации распределения натяжения, видимого на границе зацепления шкива перекрученным свободным промежутком, который является правильно выровненным.
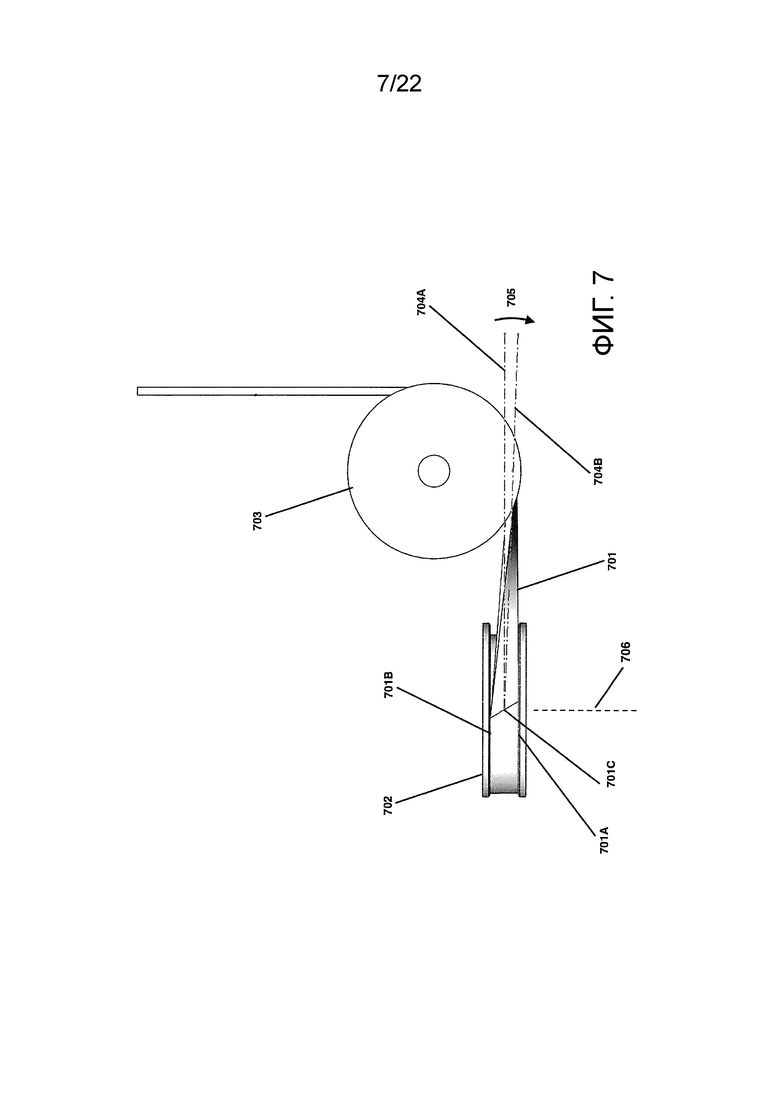
Фиг. 7 изображает вид сверху образца с перекрученным свободным промежутком, который содержит дополнительный конструктивный элемент угла наклона.
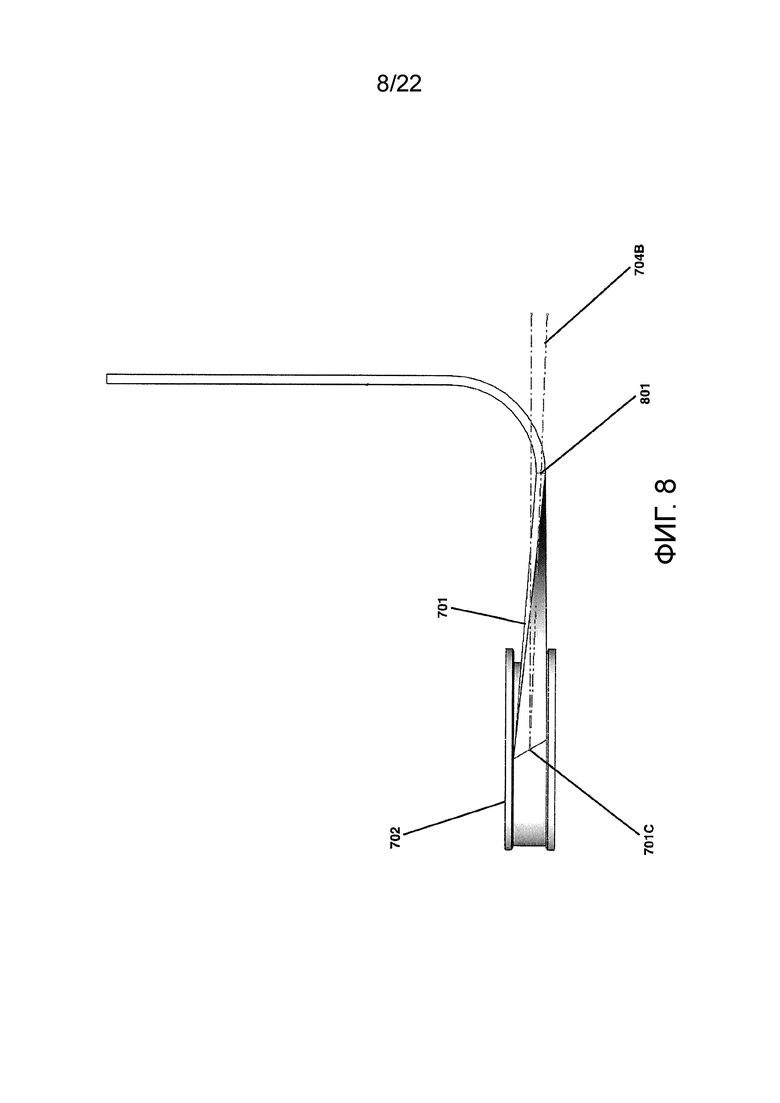
Фиг. 8 изображает тот же самый вид сверху образца с перекрученным свободным промежутком без вторичного поддерживающего шкива, чтобы более четко изобразить геометрический центр сечения ремня.
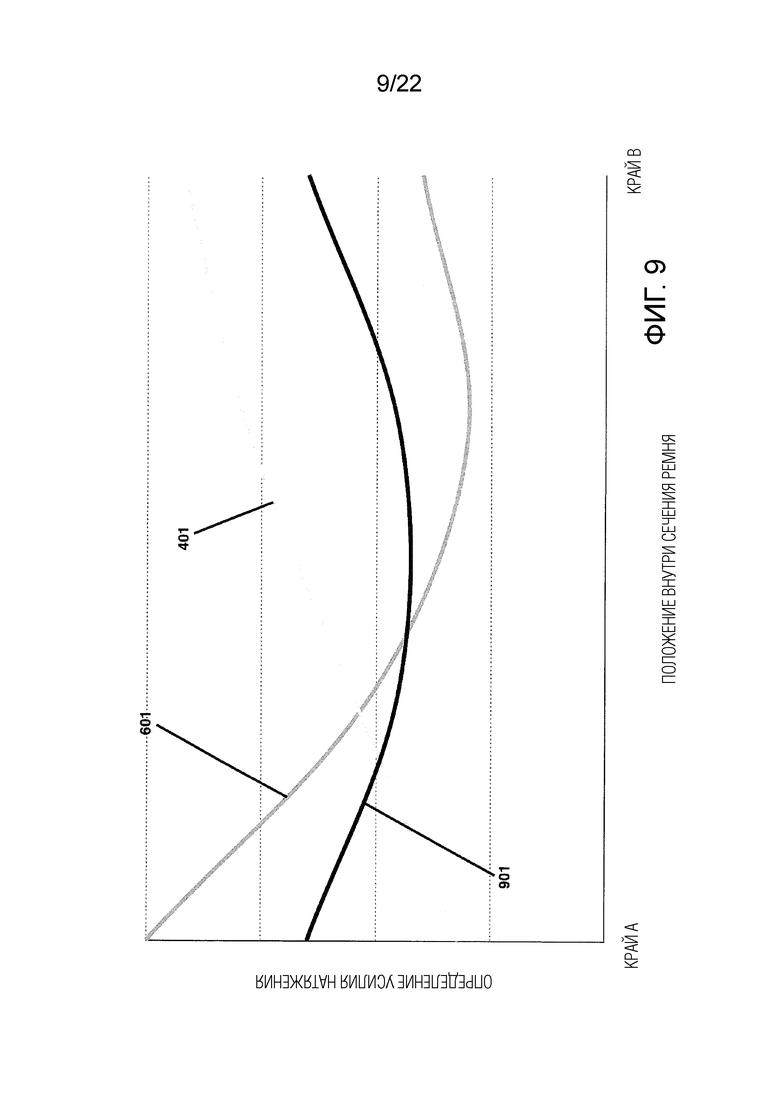
Фиг. 9 представляет собой пример иллюстрации распределения натяжения образца с перекрученным свободным промежутком и дополнительным конструктивным элементом угла наклона.
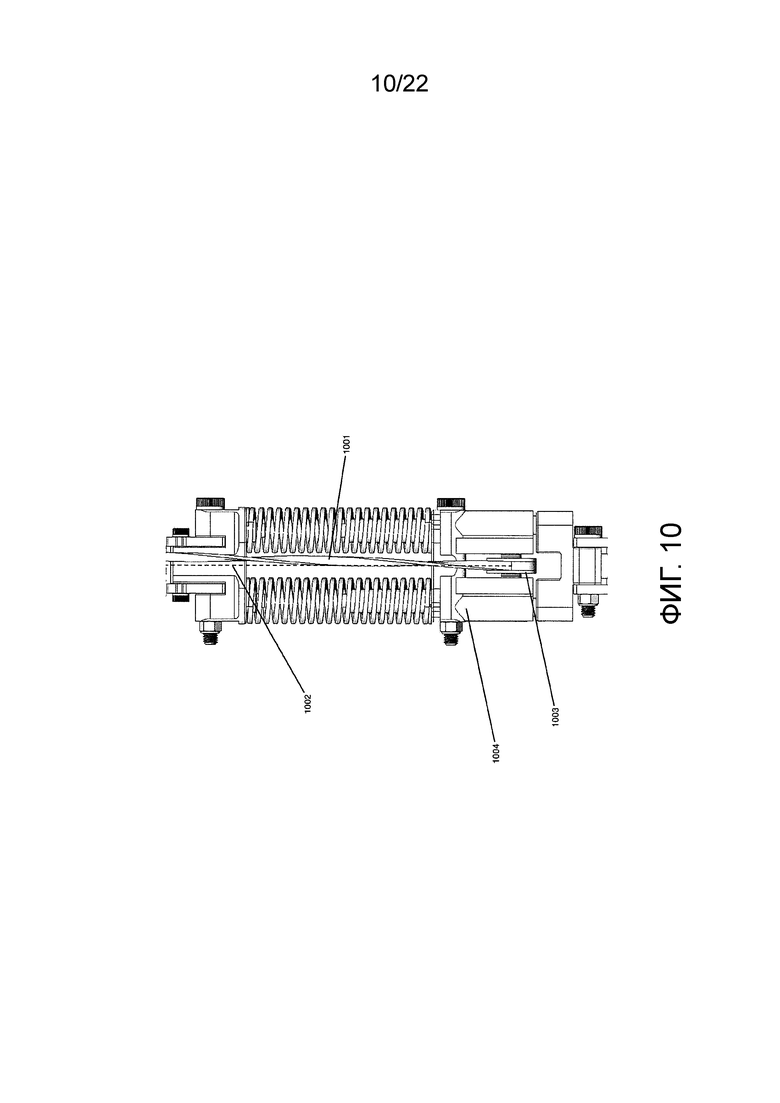
Фиг. 10 иллюстрирует машину с перекрученным свободным промежутком, поддерживаемым шкивом.
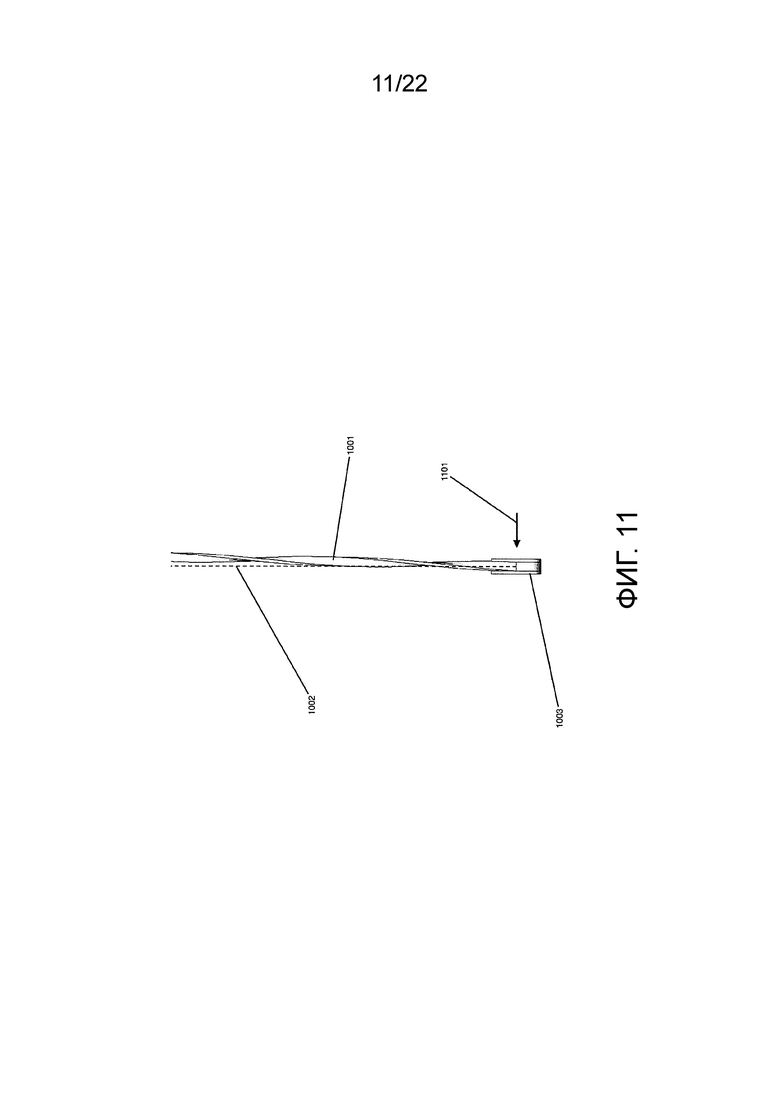
Фиг. 11 показывает перекрученный свободный промежуток по Фиг. 10 без поддерживающей структуры.
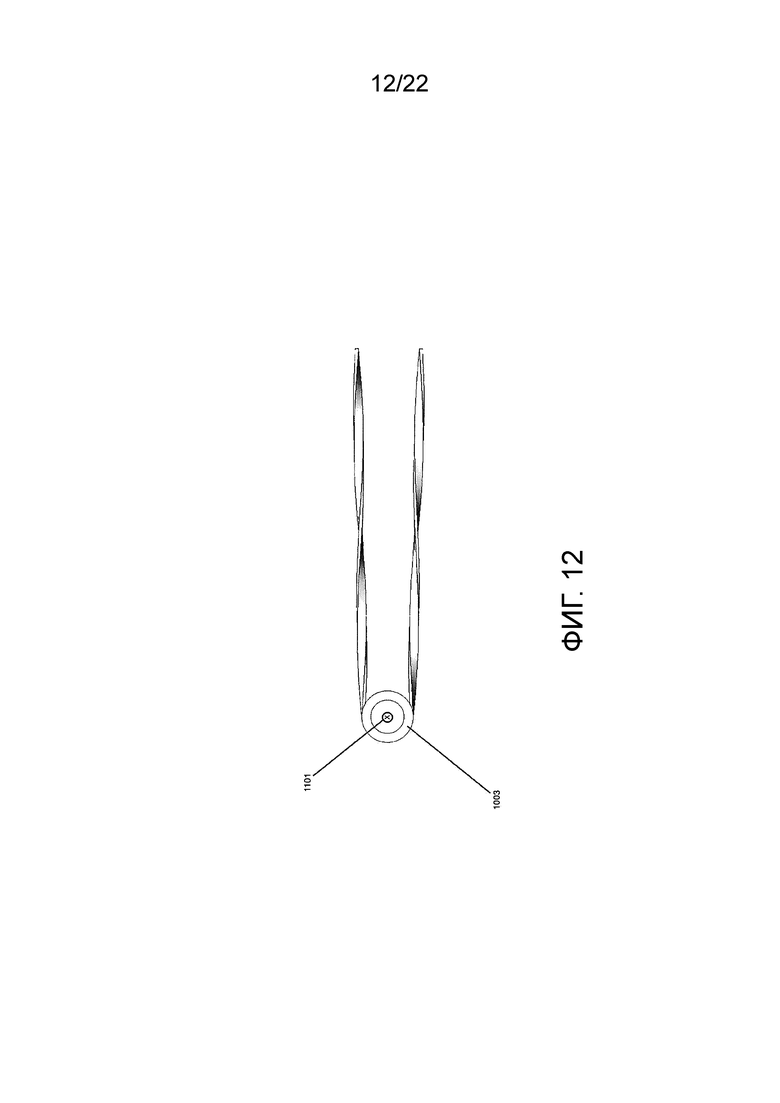
Фиг. 12 изображает вид сбоку варианта реализации, показанного на фиг. 11.
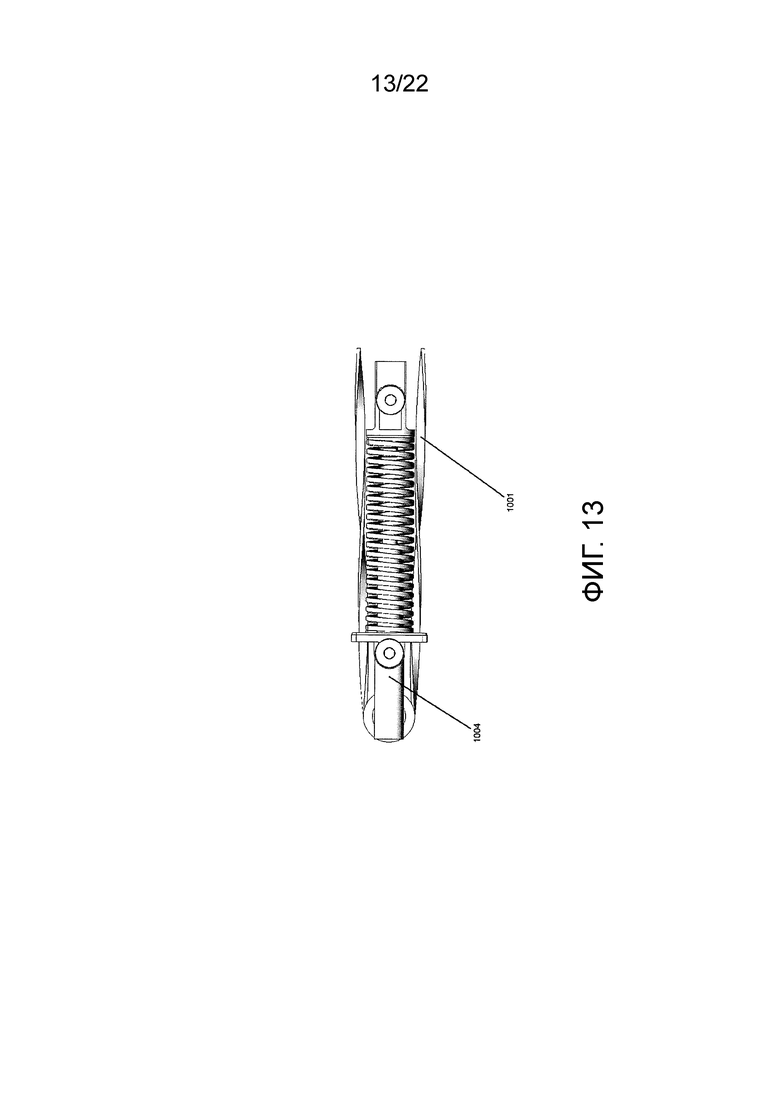
Фиг. 13 показывает вид сбоку машины, иллюстрированной на фиг. 10.
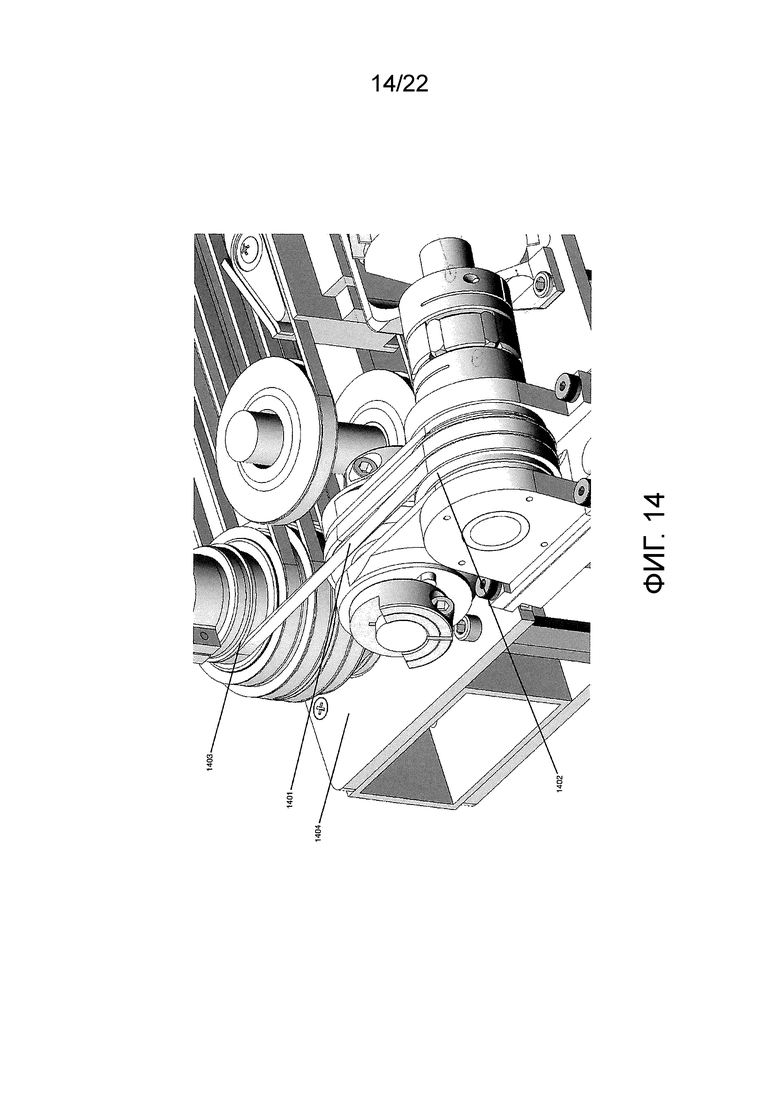
Фиг. 14 иллюстрирует другую машину, которая использует дополнительный угол наклона на перекрученном промежутке.
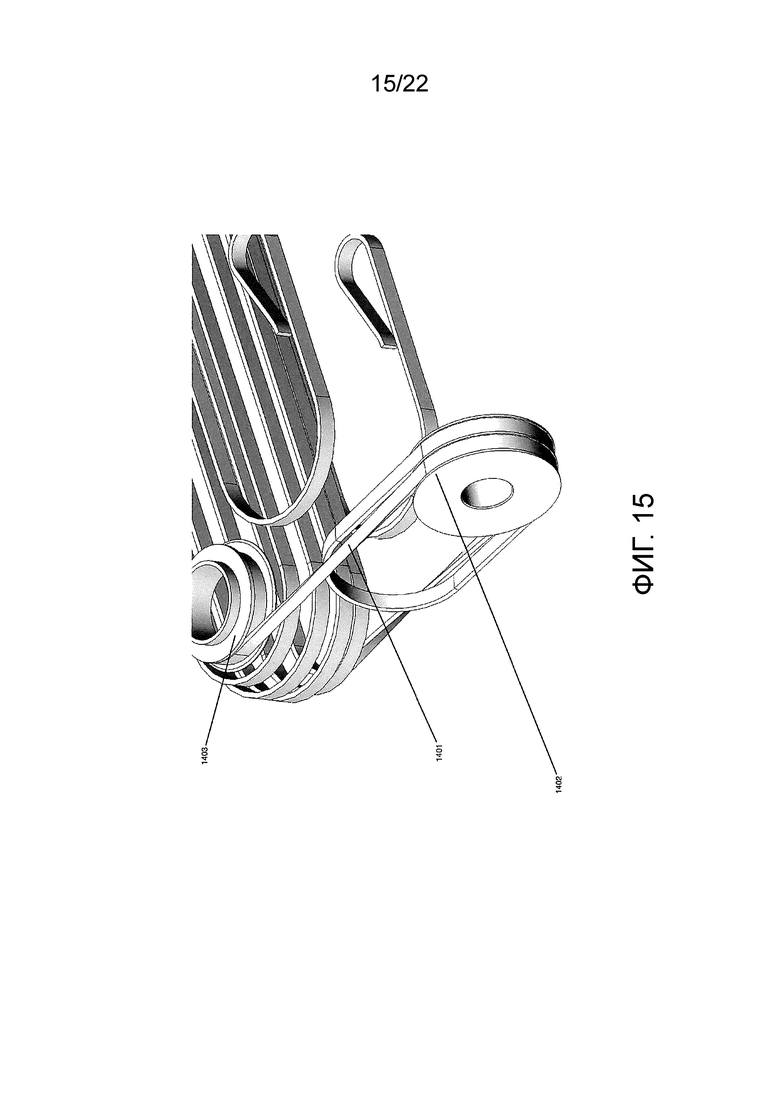
Фиг. 15 иллюстрирует свободный промежуток по фиг. 14 с остальной частью ремня вместе с его поддерживающими шкивами.
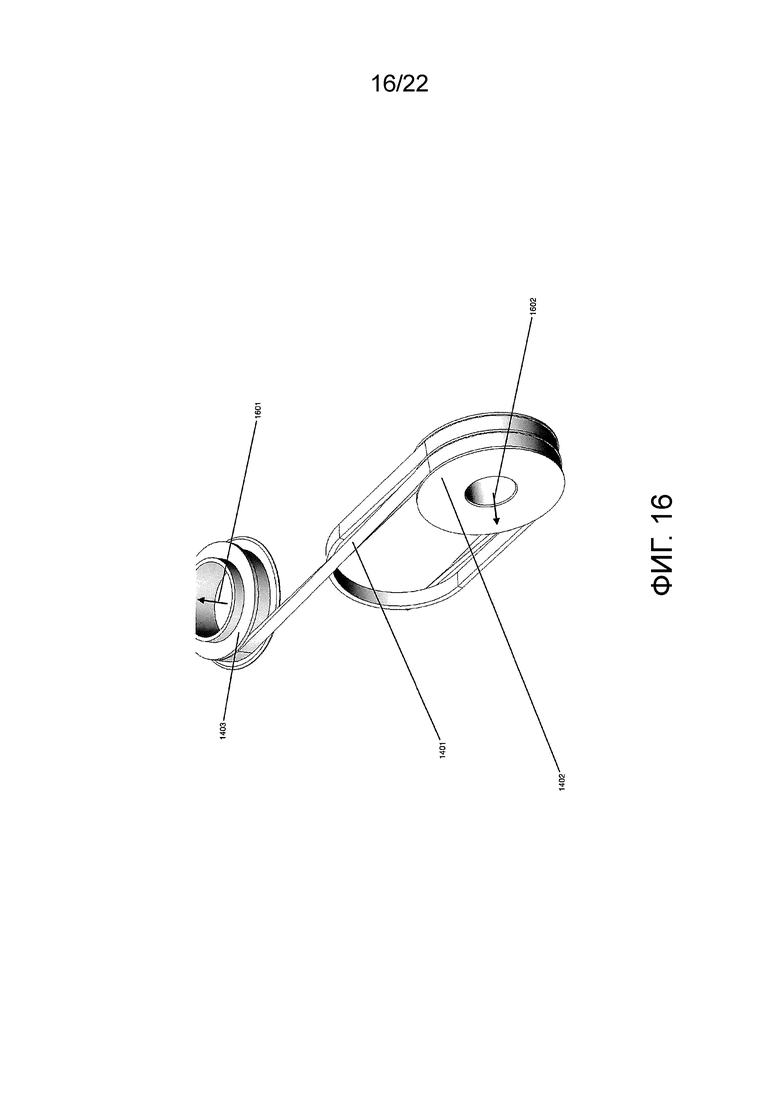
Фиг. 16 показывает направления, на которые шкивы на фиг. 14 были смещены от их геометрически истинных касательных положений.
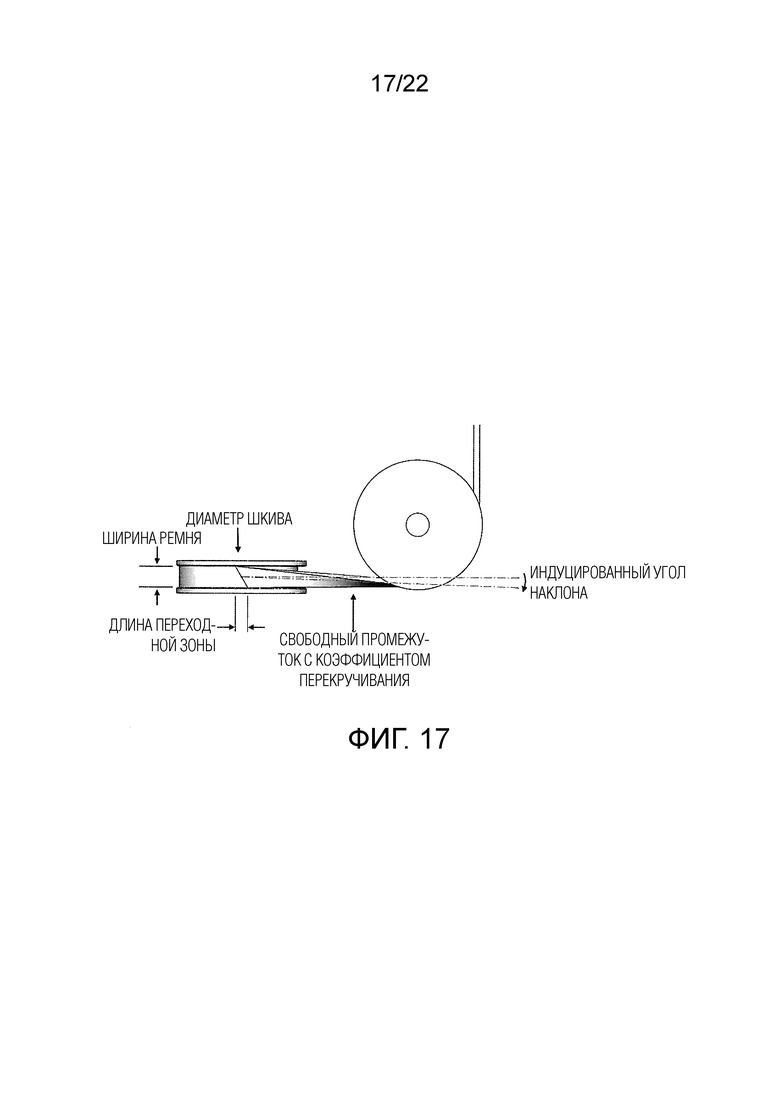
Фиг. 17 показывает модель перекрученного ремня, используемого для анализа коэффициента перекручивания.
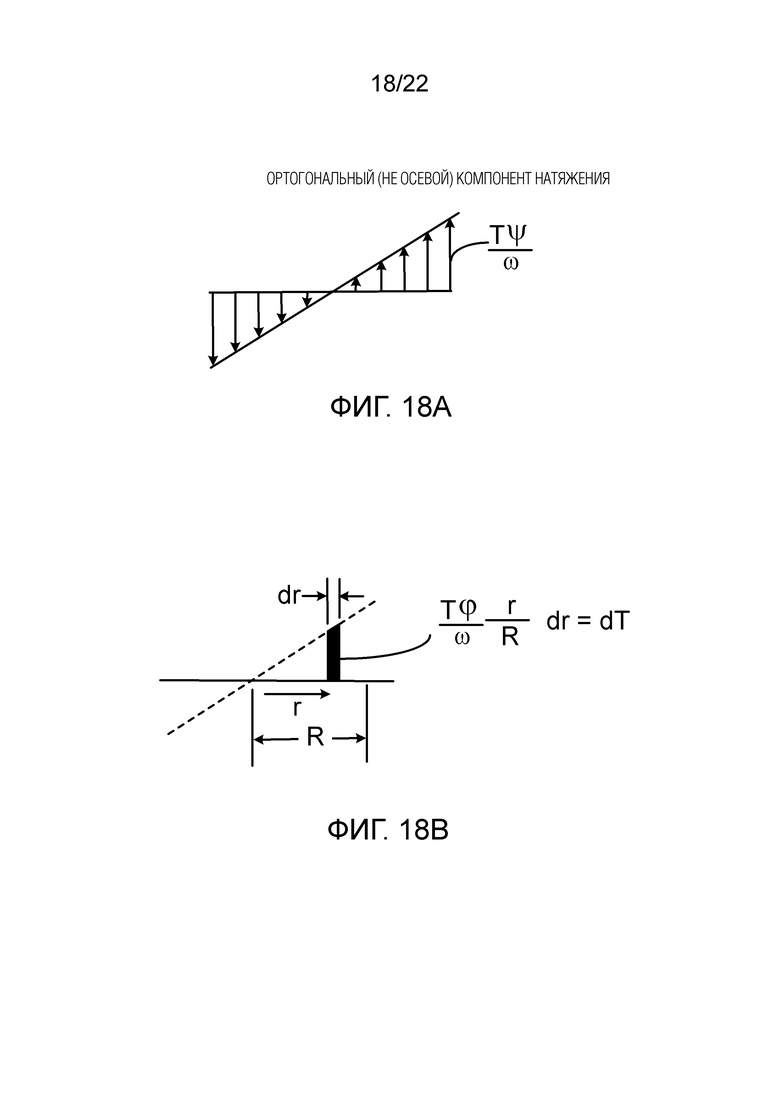
Фигуры 18А и 18В показывают моделирование ортогональной (не осевой) составляющей натяжения ремня.
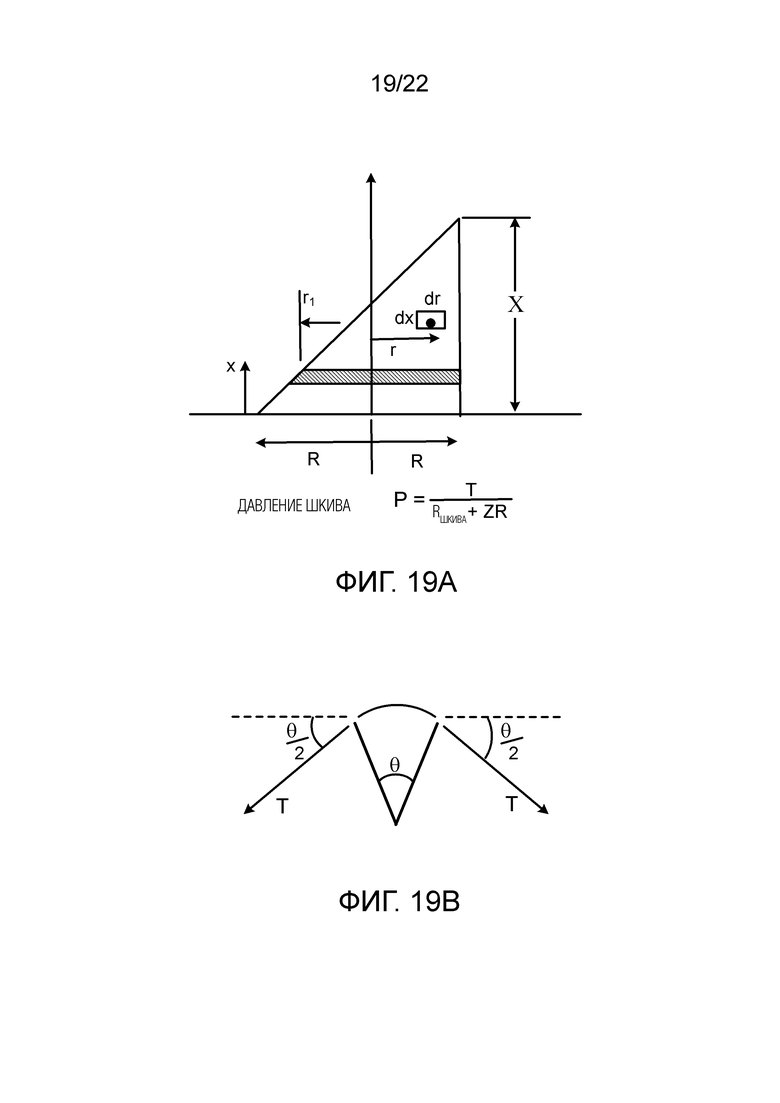
Фигуры 19А и 19В иллюстрируют анализ переходного контакта на шкиве.
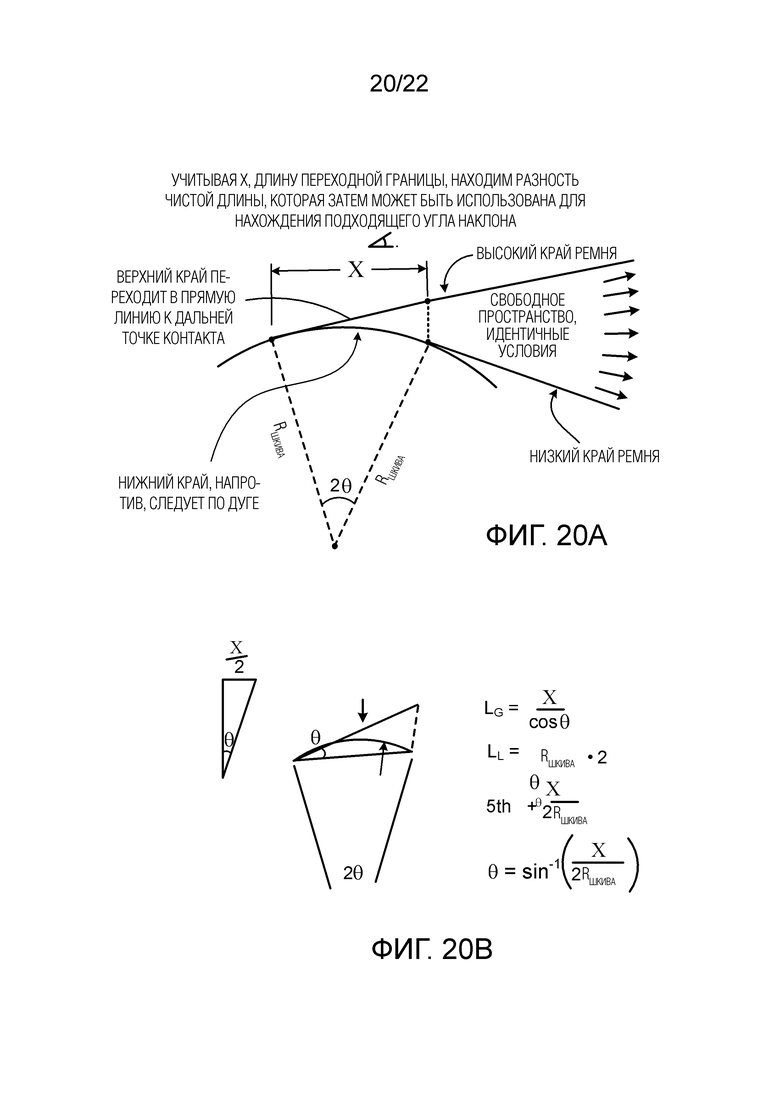
Фигуры 20A и 20В показывают перепад чистой длины, который может быть использован для нахождения подходящего угла наклона.
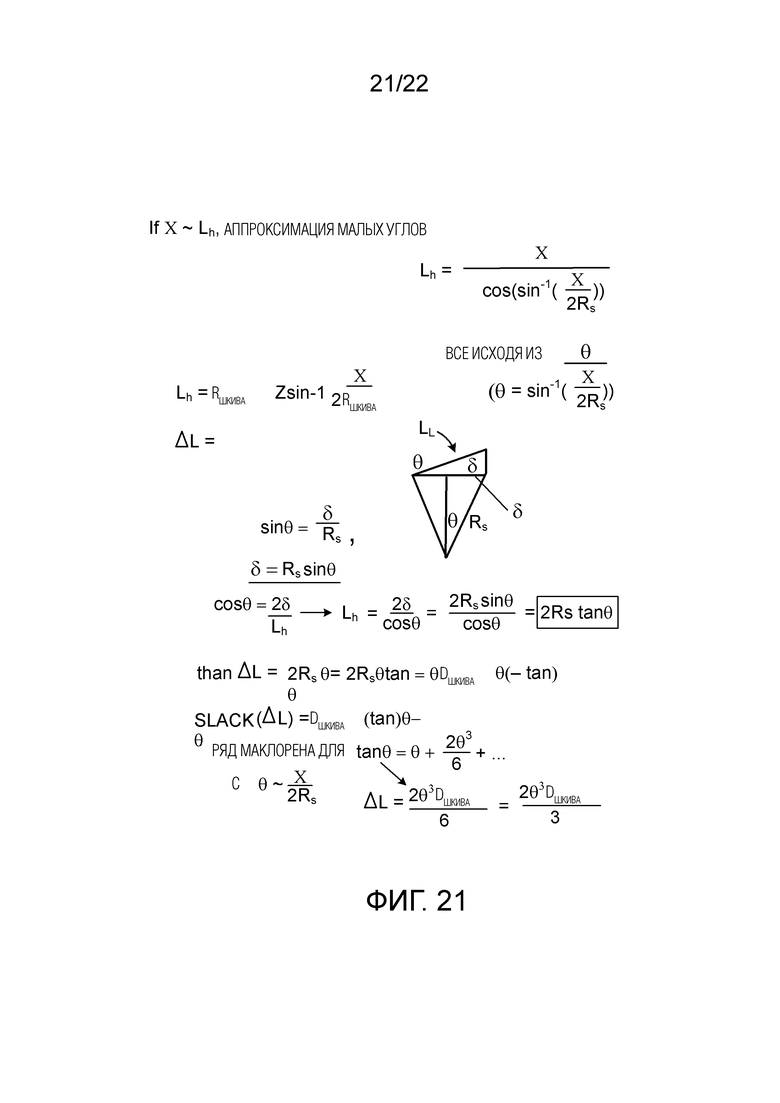
Фиг. 21 показывает, как тригонометрия и ряд Маклорена позволяют относительному слабому значению ΔL быть связанным с размером переходной зоны.
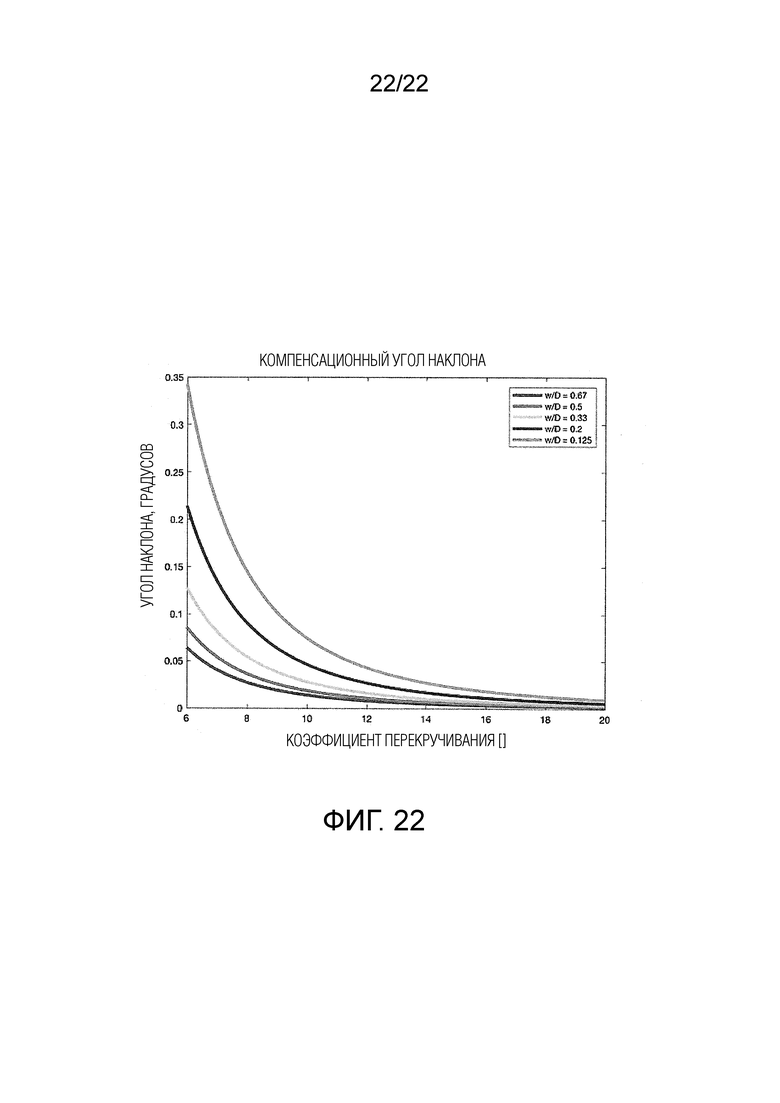
Фиг. 22 иллюстрирует график теоретического компенсационного угла наклона, построенный как функция от коэффициента перекручивания и коэффициента ширины.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже приведены более подробные описания различных концепций, относящихся к примерам осуществления способа нормализации распределения натяжения ремня в системах углового ременного привода.
Фиг. 1 изображает предшествующий уровень техники конструкции углового привода с плоскими ремнями. Узел 101 привода с плоским ремнем состоит из множества шкивов 103, которые могут включать фланцы для направления ремня. Плоский ремень 102 намотан вокруг множества шкивов 103. Единственный перекрученный свободный промежуток 102А существует между двумя шкивами. Согласно обычной инженерной практике, осевая линия ремня будет проходить по касательной к каждой из поверхностей шкива и ортогонально к оси вращения каждого шкива. Перекрученный свободный промежуток 102А, как правило, предписан иметь относительно низкое перекручивание с отношением перекручивания (L/W), превышающим 20:1. Как показано в этом образце, перекрученный свободный промежуток 102А имеет коэффициент перекручивания около 8:1. При правильном выравнивании шкива, эта топология ремня будет быстро ухудшаться из-за истирания боковой стенки и несбалансированного распределения натяжения внутри прядей на границах шкива.
Фиг. 2 изображает конструкцию плоского ременного привода без перекручиваний и с двумя параллельными смещенными шкивами, 203А и 203В. Угол наклона (более очевидный на фиг. 3) вызовет быструю деградацию оболочки ремня и последующее разрушение армирующих прядей.
Фиг. 3 показывает вид сверху образца, иллюстрированного на фиг. 2 с обозначенными шкивами 203А и 203В. Свободный промежуток 202 имеет геометрический изгиб на обоих концах на границах зацепления шкива. Линия контакта представляет собой линию, на которой свободный промежуток ремня входит в контакт со шкивом и обозначена на левостороннем шкиве своими концами 301А и 301В. Касательная осевая линия 303А шкива 203А является касательной к поверхности шкива и является перпендикулярной оси 304 вращения шкива. Геометрическая осевая линия свободного промежутка 202 будет проходить через касательную осевую линию 303А в хорошо выровненном ременном приводе. Однако в этом образце, геометрическая осевая линия 303В образует небольшой угол 304 с касательной осевой линией 303А. Это угловое смещение свободного промежутка 202 со шкивом 203А называется углом наклона. Непредвиденные отклонения угла наклона, которые пропускает проектировщик, могут быть причиной преждевременного выхода из строя ремня.
Фиг. 4 представляет пример графика распределения натяжения армирующих прядей внутри ремня на линии контакта образца на фиг. 3. Края А и В соответствуют отмеченным концам 301А и 301В линии контакта. Угол наклона, показанный на фиг. 3 приводит к асимметричному распределению натяжения со смещением к концу 301В, противоположному направлению смещения угла наклона. Величина 402 асимметрии представляет разницу в натяжении прядей между двумя прядями, которые находятся ближе всего к их соответствующим краям ремня. Неравномерное распределение натяжения вызывает преждевременный выход из строя ремня посредством трех механизмов. Край с высоким натяжением будет преждевременно выходить из строя из-за растягивающих и сгибающих натяжений, проявляющихся в армирующих прядях. Материал оболочки (часто полиуретан) между прядями и поверхностью шкива будет быстро разрушаться из-за высокого уровня сжатия, который он получает от прядей с высоким натяжением. Наконец, истирание боковой стенки шкивом с фланцами в месте 302 будет приводить к ухудшению боковой стенки материала оболочки.
Фиг. 5 изображает хорошо выровненный угловой привод со свободным промежутком 501. Геометрическая осевая линия ремня 505 является перпендикулярной оси вращения 504 шкива 502. Для свободных промежутков с высоким коэффициентом перекручивания и относительно плавной геометрией перекручивания это выравнивание является правильным и используется часто. Для конструкций с небольшими коэффициентами перекручивания, которые имеют агрессивную геометрию перекручивания (например, этот образец), повреждение ремня будет происходить быстро с сокращением срока службы на 90%-99% по сравнению со свободным промежутком с высоким коэффициентом перекручивания. Агрессивное перекручивание вызывает значительное угловое смещение в линии контакта 503 между свободным промежутком 501 и шкивом 502, делая его не параллельным оси вращения 504 шкива. Край 501А ремня контактирует со шкивом прежде противоположного края 501В ремня, с дополнительной опорой, которую край 501А получает от шкива, вызывая более высокое натяжение на этой стороне ремня. Кроме того, сама геометрия перекручивания заставляет внешние пряди ремня следовать спиральным путям, которые длиннее внутренних прядей, которые находятся ближе к геометрической центральной линии плоского ремня. Внешние пряди, таким образом, находятся под более высоким натяжением, чем внутренние пряди. Эти два условия накладывают друг на друга для образования высоко неравномерного распределения натяжения внутри ремня на границе зацепления со шкивом. Подобно состоянию угла наклона, состояние сильного перекручивания приводит к повышенному натяжению армирующих прядей, сильному сжатию материала оболочки под сильно натянутыми прядями, и истиранию боковых стенок между боковой стенкой ремня и фланцем шкива в месте 502А, и все это вызывает быстрый выход из строя ремня.
Фиг. 6 показывает пример осуществления формы натяжения армирующих прядей внутри ремня вблизи линии 503 контакта. Нижний край 501А ремня находится существенно под более высоким натяжением, чем его противоположный край 501В. Дополнительно, внешние пряди, таким образом, находятся под большим натяжением, чем внутренние пряди. Эти два условия совместно создают изображенное распределение 601 натяжения. Величина 602 асимметрии является отрицательной со смещением к краю А.
Фиг. 7 изображает угловой привод с дополнительным углом наклона. Этот образец аналогичен образцу, показанному на фиг. 5, со смещением вниз положения вторичного шкива 703. Это вызывает изменение геометрии осевой линии свободного промежутка 701 из его хорошо выровненного состояния 704А в не выровненное состояние 704В, создавая угол 705 наклона на границе 701С зацепления. Таким образом, геометрия осевой линии 704В свободного промежутка 701 больше не является перпендикулярной оси 706 вращения шкива. Угол 705 наклона тщательно выбирается с учетом условий эксплуатации ременного привода и, в случае такого образца, как этот, с агрессивным перекручиванием, вызывает уменьшение в асимметрии распределения натяжения в ремне на границе 701С зацепления. Армирующие пряди вблизи краев 701А и 701В ремня находятся в более похожих состояниях натяжения из-за преднамеренно введенного угла 705 наклона.
Фиг. 8 изображает тот же образец с удаленным вторичным шкивом 703, чтобы лучше проиллюстрировать несоосность углов наклона. Граница 801 зацепления с вторичным шкивом 703 была смещена конструктором из его хорошо выровненного состояния и заставляет свободный промежуток 701 иметь угол 705 наклона на границе 701С зацепления.
Фиг. 9 изображает пример осуществления формы распределения натяжения в пределах армирующих прядей ремня на границе 701С зацепления. Края А и В соответствуют краям 701А и 701В ремня. Распределение 901 натяжения является, по существу, плоским, с низким стандартным отклонением и идентичным состоянием натяжения во внешних прядях, которые находятся вблизи краев 701А и 701В ремня. Распределение натяжения является результатом наложения двух независимых условий границы зацепления. Распределение 401 натяжения угла наклона (показанное здесь для сравнительных целей) имеет разность натяжения внешней пряди величиной 402 и имеет положительный знак. Распределение 601 натяжения перекрученного образца имеет разность натяжения внешней пряди величиной 602 и имеет отрицательный знак. Когда два условия накладываются друг на друга, они образуют распределение 901 натяжения, среднее значение которого является, по существу, аналогичным среднему значению для 401 и 601, но асимметрия которого была уменьшена по величине. Эта нормализация распределения натяжения на границе 701С зацепления приводит к значительному увеличению срока службы.
Фигуры 10-16 изображают конструктивные варианты использования дополнительных углов наклона для угловых приводов.
Фиг. 10 иллюстрирует машину с перекрученным свободным промежутком 1001, поддерживаемым шкивом 1003. Центральная линия ремня отклоняется от геометрической касательной 1002 шкива 1003, как показано. Поддерживающие структуры 1004 позиционируют шкив 1003 относительно остальной части машины.
Фиг. 11 показывает перекрученный свободный промежуток по Фиг. 10 со скрытой структурой 1004. Поддерживающий шкив 1003 смещен в направлении 1101 для создания угла наклона, который правильно компенсирует неравномерное натяжение на границе зацепления.
Фиг. 12 изображает вид сбоку варианта реализации, показанного на фиг. 11. Шкив 1003 смещен на вектор 1101 направления, который показан указывающим на страницу.
Фиг. 13 показывает вид сбоку машины, иллюстрированной на фиг. 10 с поддерживающей структурой 1004.
Фиг. 14 иллюстрирует другую машину, которая использует дополнительный угол наклона на перекрученном промежутке. Перекрученный свободный промежуток 1401 поддерживается на обоих концах посредством поддерживающих шкивов 1402 и 1403, среди других шкивов и поддерживающих структур 1404, которые поддерживают относительные положения всех вращающихся компонентов.
Фиг. 15 иллюстрирует свободный промежуток 1401 по фиг. 14 с остальной частью ремня с его поддерживающими шкивами. Остальные структуры 1404 являются скрытыми на этой фигуре, для ясности.
Фиг. 16 показывает направления, на которые шкивы были смещены от их геометрически истинных касательных положений. Шкив 1402 был слегка смещен на вектор 1602 направления, чтобы нормализовать натяжение на его границе зацепления. Шкив 1403 был слегка смещен на вектор 1601 направления, чтобы нормализовать распределение натяжения на его поверхности зацепления.
Следует отметить, что способы, воплощенные в данном документе, являются целью конструктивной концепции: Разработчик осведомлен, что нейтральное рабочее положение агрессивно перекрученного армированного ремня с узкой шириной будет существенно отличаться от не перекрученного точно вращающегося ремня, что заставляет его или ее размещать направляющие геометрии, такие как поверхности шкива, фланцы или выпуклости в положениях, которые преднамеренно вызывают дополнительные углы наклона для продления срока службы ремней. Фланцы могут быть ненужными в некоторых конкретных обстоятельствах, в которых раскрытые способы проектирования все еще используются.
Фиг. 17 показывает модель перекрученного ремня, используемого для анализа коэффициента перекручивания. Преднамеренное введение угла наклона в границу зацепления с перекрученными промежутками может увеличить срок службы систем с сильно перекрученными ремнями на порядки. Угловые приводы демонстрируют неравномерное распределение натяжения ремня, которое является особенно сильным на границе зацепления шкива. Следующий анализ обеспечивает теоретическую основу и решение в закрытой форме для определения компенсации угла наклона. В следующем анализе будут использованы следующие обозначения:
Полное натяжение ремня - Т
Диаметр шкива - Dшкива
Радиус шкива - Rшкива
Расстояние осевой линии между самыми внешними проволочными тросами - ωos
Коэффициент перекручивания - (Т.R.)
Длина переходной зоны - X
Половина ширины ремня - R
Полная ширина ремня - W
Угол спирали - ψ
Коэффициент перекручивания - θ
Следующие предположения сделаны в отношении организации следующего анализа:
- Проволочные тросы внутри ремня следуют параллельным спиральным путям радиуса, соразмерного с их смещением от центра ремня;
- Ремни являются бесконечно гибкими и бесконечно тонкими, без гибкой радиальной оболочки;
- Аппроксимация малых углов выполняется для некоторых углов <0,1 радиана;
- Линия контакта на границе зацепления между ремнем и шкивом наклонена от края к краю и имеет прямую форму;
- Распределение давления внутри переходной зоны отвечает за подачу внутреннего момента перекручивания в пределах свободного промежутка ремня;
- Переходная зона лежит симметрично относительно радиуса, перпендикулярного к вектору полного натяжения ремня;
- Индуцированный угол наклона обеспечивает дифференциал по длине через стандартные уравнения изгиба, где деформация является пропорциональной расстоянию от нейтральной оси.
Вывод
Общая стратегия получения компенсационного угла наклона может быть описана следующим образом. Первый шаг состоит в нахождении длины переходной зоны. Это выполняется посредством способов интегрирования нагрузки и статики нагрузки. Вначале получается внутренний момент перекручивания ремня, а затем момент перекручивания, который накладывается на ремень в переходной зоне неизвестной длиной X переходной зоны. Поскольку перекрученный свободный промежуток получает свой внутренний момент исключительно из переходной зоны, мы можем установить равенство между этими двумя моментами перекручивания, чтобы получить длину зоны X.
Периферическая длина X, вдоль которой ремень взаимодействует со шкивом, может быть использована для оценки относительного геометрического провисания, создаваемого посредством некоторой относительно простой тригонометрии. В переходной области, нижний край ремня поддерживает контакт со шкивом, в то время как верхний край ремня перемещается через свободное пространство, вызывая асимметрию длины, что приводит к асимметрии натяжения.
Рассчитанная разница в длине в переходной зоне затем противопоставляется чистой разнице в длине, создаваемой углом наклона, моделируемой как простой луч при изгибе, в котором натяжения пропорциональны расстоянию от центральной линии. Угол наклона неизвестной величины устанавливается для противопоставления чистой разнице длины, полученной в части 2, что обеспечивает выравнивание длины вдоль внешних краев ремня.
Часть 1 - Получение длины переходной зоны, X.
Модель спиральной геометрии используется для получения угла наклона армирующих проволочных тросов внутри ремня в зависимости от r, расстояния от центральной точки ремня. Угол спирали, затем связан с коэффициентом T.R. перекручивания.
Спираль

для малого ψ: 
Анализ контекста коэффициента перекручивания
L=2R(T.R.) 
Для T.R.=2 0, 
Внутренний момент перекручивания ремня получается путем интегрирования не осевого компонента натяжения в армирующих проволочных тросах ремня. Установлено, что внутренний момент перекручивания зависит от ширины ремня (полная ширина=2R), общего натяжения Т и угла спирали ψ.
Анализ внутреннего момента перекручивания внутри ремня с заданным T.R. Данный ремень с полным натяжением Т, шириной w и равномерным распределением величины T/W, ортогональная (не осевая) составляющая растяжения может быть смоделирована, как показано на фигурах 18А и 18В, где:


Следующая работа устанавливает двумерный поверхностный интеграл, который используется для нахождения вращательного момента, который шкив налагает на ремень в переходной зоне из-за асимметричного характера контакта.
Переходной контакт в шкиве, предполагающий прямую линию контакта LOC, может быть описан со ссылкой на фигуры 19А и 19В. Основываясь на фигурах 19А и 19В,
dM=rPdxdr
Оценка двумерного интеграла приводит к формульному базису вращательного момента, подаваемого в переходной зоне Мграницы. Обнаружено, что вращательный момент, подаваемый в переходной зоне, является функцией длины переходной зоны X, X, среднего давления Р шкива и полуширины R ремня, где



Поскольку внутренний момент перекручивания ремня обеспечивается моментом на границе переходной зоны, мы можем установить равенство между ними. Это позволяет нам определить длину переходной зоны X как функцию диаметра шкива Dшкива и коэффициента T.R. перекручивания.
Установка Minterface=Mint. дает
Для 
Часть 2 - Оценка величины относительного провисания, создаваемого между краями ремня благодаря наличию переходной зоны.
Двумерная геометрическая модель устанавливает некоторые длины, которые необходимо рассчитать, учитывая длину переходной зоны X и радиус шкива Rшкива.
Учитывая X, длину переходной границы, находим разность чистой длины, которая затем может быть использована для нахождения подходящего угла наклона, как показано на фигурах 20A и 20В.
Использование тригонометрии и ряда Маклорена позволяет связать относительное провисание ΔL с размером переходной зоны, а также с диаметром шкива, как показано на фиг. 21.
Часть 3 - Нахождение компенсационного угла наклона
Угол наклона моделируется посредством стандартных уравнений изгиба балки, в которых внешний и внутренний края ремня каждый следует за дугой с одной и той же центральной точкой. Внешний край перемещается на большее расстояние, чем внутренний край, с коэффициентом θнаклона * ωos, где ωos - расстояние между осевыми линиями крайних армирующих тросов. Установка этого значения равным чистому провисанию ΔL, созданному переходной зоной, приводит к условию чистой равной длины между двумя краями. Это позволяет нам найти требуемый угол наклона θнаклона.
Теоретический компенсационный угол наклона теперь может быть установлен:
Результаты и анализ
Теоретический компенсационный угол наклона может быть графически нанесен как функция от коэффициента перекручивания и коэффициента ширины ωos/Dшкива, как показано на фиг. 21. Коэффициент ширины представляет собой просто расстояние между двумя крайними тросами, деленное на диаметр барабана шкива, которое увеличивается с увеличением ширины ремня для данного размера барабана. Он приближает коэффициент ширины ремня W/Dшкива по мере увеличения ширины ремня, но при небольшой ширине, межосевое расстояние между крайними проволочными тросами ωos может составлять 80% от самой ширины ремня. Коэффициент перекручивания является безразмерным и определяется количественно как длина, на которой происходит поворот ремня на 90 градусов, деленная на ширину ремня.
Обсуждение и выводы
Зависимости компенсационного угла наклона являются обратными кубическим фактором коэффициента T.R. перекручивания и обратными коэффициенту отношения ширины ωos/Dшкива. И то, и другое хорошо видно на приведенном выше графике: Поскольку ширина ремня уменьшается для данного диаметра барабана, требуемый угол наклона увеличивается. Особенно влияет кубический фактор: Для агрессивно перекрученных ремней с коэффициентом перекручивания менее 10 и малым коэффициентом ширины, требуемый угол наклона приближается к величине порядка 1 градуса.
Эмпирические данные предполагают, что теоретические значения, полученные здесь, ниже в 2-3 раза. Это может быть связано с различными факторами, включая соответствие материала, жесткость на изгиб ремня или неточное геометрическое моделирование переходной зоны и свободных промежутков. Несмотря на ошибку величины, стоит проверить, справедливы ли фундаментальные зависимости обратной кубической зависимости от отношения перекручивания и обратной линейной зависимости от отношения ширины во всем существенном диапазоне геометрий и материалов.
Проектировщик ременной передачи мощности начинает свою систему автоматизированного проектирования с геометрического определения идеальной траектории ремня. Они делают это с пониманием того, что, где бы ни возникали перекрученные промежутки, должен быть необходим конкретный угол наклона, который может быть получен эмпирически или теоретически, и они соответственно размещают углы наклона в геометрии идеального ремня. Затем проектировщик добавляет шкивы, окончания и т.д. в положениях или диаметральных размерах, которые будут отличаться от ожидаемых при правильном выравнивании (например, на 2 мм больше и на 1 мм шире). Проектировщик добавляет необходимые поддерживающие структуры для шкивов. Проектировщик рассматривает допуск и выравнивание для системы и корректирует выравнивание, чтобы оно было смещено относительно центра, как раскрыто в данном документе.
Используемые здесь термины «приблизительно», «примерно», «по существу» и аналогичные термины предназначены для того, чтобы иметь широкое значение в гармонии с общим и общепринятым использованием специалистами в данной области техники, к которой относится данный предмет раскрытия. Специалистам в данной области техники, которые рассматривают это изобретение, должно быть понятно, что эти термины предназначены для того, чтобы позволить описание определенных описанных признаков, не ограничивая объем этих признаков предоставленными точными числовыми диапазонами. Соответственно, эти термины следует интерпретировать как указывающие на то, что несущественные или незначительные модификации или изменения описанного предмета и считаются находящимися в рамках объема раскрытия.
Следует отметить, что термин «пример осуществления», используемый в данном документе для описания различных вариантов осуществления, предназначен для указания того, что такие варианты осуществления являются возможными примерами, представлениями и/или иллюстрациями возможных вариантов осуществления (и такой термин не предназначен для обозначения того, что такие варианты осуществления являются обязательно неординарными или превосходными примерами).
Для цели настоящего раскрытия, термин «связанный» означает соединение двух элементов прямо или косвенно друг с другом. Такое соединение может быть неподвижным или подвижным по природе. Такое соединение может быть достигнуто двумя элементами или двух элементов, и любые дополнительные промежуточные элементы в целом образованы как единое цельное тело друг с другом или с двумя элементами или двумя элементами и любыми дополнительными промежуточными элементами, прикрепленными друг к другу. Такое соединение может быть постоянным по природе или может быть съемным или высвобождаемым по природе.
Следует отметить, что ориентация различных элементов может отличаться в соответствии с другими примерами осуществления, и что такие варианты предназначены для охвата настоящим изобретением. Понятно, что признаки раскрытых вариантов осуществления могут быть включены в другие раскрытые варианты осуществления.
Важно отметить, что конструкции и устройства пружинных систем или их компонентов, как показано в различных примерах осуществления, являются только иллюстративными. Хотя только несколько вариантов осуществления были подробно описаны в этом раскрытии, специалисты в данной области техники, которые рассматривают это изобретение, легко поймут, что возможны многие модификации (например, изменения в габаритах, размерах, структурах, формах и пропорциях различных элементов, значениях параметров, схемах расположения, использования материалов, цветов, ориентации и т.д.) без существенного отклонения от новых учений и преимуществ раскрытого предмета. Например, элементы, показанные как образованные как одно целое, могут быть составлены из нескольких частей или элементов, положение элементов может быть обращено или изменено иным образом, и природа или количество дискретных элементов или положений могут быть изменены или отличаться. Порядок или последовательность любых этапов процесса или способа могут изменяться или повторно чередоваться согласно альтернативным вариантам осуществления. Другие замены, модификации, изменения и пропуски также могут быть сделаны в конструкции, рабочих условиях и компоновке различных примеров осуществления без отклонения от объема настоящего раскрытия.
Вся литература и аналогичные материалы, цитируемые в этой заявке, включая, но, не ограничиваясь этим, патенты, патентные заявки, статьи, книги, трактаты и веб-страницы, независимо от формата такой литературы и аналогичных материалов, прямо включены путем ссылки в их полноте. В случае, если одна или более из включенной литературы и аналогичных материалов отличаются от или противоречат этой заявке, включая, но не ограничиваясь определенными терминами, условием использования, описаниями способов или тому подобным, эта заявка контролируется.
Хотя в материалах настоящей заявки было раскрыто и проиллюстрировано множество обладающих признаками изобретения различных вариантов осуществления, специалистам в данной области техники будет абсолютно очевидно широкое разнообразие других средств и/или конструкций для выполнения функций и/или для получения результатов и/или одного или более преимуществ, описанных в материалах настоящей заявки, при этом каждое из таких изменений и/или модификаций полагается как находящееся в пределах объема обладающих признаками изобретения вариантов осуществления, описанных в материалах настоящей заявки. В более общем смысле специалисты в данной области техники без труда осознают, что все параметры, размеры, материалы и конфигурации, описанные в материалах настоящей заявки, подразумеваются в качестве примерных, и что фактические параметры, размеры, материалы и/или конфигурации будут зависеть от специфичного применения, для которого эти обладающие признаками изобретения идеи используются. Специалисты в данной области техники осознают или будут в состоянии определить, используя накопленный опыт, множество эквивалентов для отдельных обладающих признаками изобретения вариантов осуществления, описанных в материалах настоящей заявки. Следовательно, будет понятно, что упомянутые выше варианты осуществления представлены лишь в качестве примера, и что на практике могут быть применены отличные от описанных и заявленных варианты осуществления, обладающие признаками изобретения, находящиеся в пределах объема прилагаемой формулы изобретения и ее эквивалентов. Обладающие признаками изобретения варианты осуществления настоящего изобретения направлены к каждому индивидуальному признаку, системе, изделию, материалу, комплекту и/или способу, описанному в материалах настоящей заявки. Также любое сочетание двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если такие признаки, системы, изделия, материалы, комплекты и/или способы не являются взаимно исключающими, включено в пределы обладающего признаками изобретения объема настоящего раскрытия.
Кроме того, способ, описанный в данном документе, может быть воплощен как способ, из которого был предоставлен по меньшей мере один пример. Действия, выполняемые как часть способа, могут быть упорядочены любым подходящим образом. Соответственно, могут быть созданы варианты осуществления, в которых действия выполняются в порядке, отличном от проиллюстрированного, что может включать в себя выполнение некоторых действий одновременно, даже если они показаны как последовательные действия в иллюстративных вариантах осуществления.
Все определения, которые даны и использованы в материалах настоящей заявки, должны быть приняты как более преимущественные, чем определения словарей, определения документов, включенных посредством ссылки, и/или обычные значения данных терминов.
Единственное число существительных, использованных в описании настоящей заявки и в формуле изобретения, если четко не указано иным образом, должно пониматься как «по меньшей мере, один».
Фраза «и/или» как указано в описании настоящей заявки, должна подразумеваться как «любой из двух или оба вместе» для соединяемых таким образом элементов, т.е. эти элементы в некоторых случаях присутствуют в этом объединении, а в других случаях - отсутствуют. Множество элементов, перечисленных с помощью «и/или» должно истолковываться подобным образом, т.е. «один или более» из элементов, соединяемых подобным образом. Если необходимо могут быть использованы другие элементы, отличные от элементов в частности перечисленных союзом «и/или», относящиеся или не относящиеся к перечисленным в частности элементам. Таким образом, в качестве неограничивающего примера, ссылка на «А и/или В», когда используется в связи со свободным языком, таким как «содержащий», может ссылаться, в одном варианте осуществления, только на А (необязательно, включая элементы, отличные от В); в другом варианте осуществления только к В (необязательно включая элементы, отличные от А); в еще одном варианте осуществления к А и В (необязательно включая другие элементы); и т.п.
Используемый здесь в описании и формуле изобретения термин «или» следует понимать как имеющий то же значение, что и «и/или», как определено выше. Например, при разделении элементов в списке «или» или «и/или» должны интерпретироваться как включающие, то есть включающие по меньшей мере один, но также включающие более одного, из числа или списка элементов, и, возможно, дополнительные незарегистрированные позиции. Только термины, четко обозначенные как противоположные, такие как «только один из» или «точно один из», или, когда используется в формуле изобретения «состоящий из», будут относиться к включению ровно одного элемента из числа или списка элементов. Как правило, термин «или», используемый в данном документе, должен толковаться только как указывающий на исключительные альтернативы (т.е. «один или другой, но не оба»), когда ему предшествуют термины исключительности, такие как «либо», «один из», «только одно из» или «точно одно из», «состоящее, по существу, из» при использовании в формуле изобретения, имеет свое обычное значение, используемое в области патентного права.
При использовании в описании настоящей заявки и в формуле изобретения фраза «по меньшей мере, один» со ссылкой к списку из одного или более элементов должна означать по меньшей мере один элемент из одного или более элементов в списке элементов, причем не обязательно включать по меньшей мере каждый элемент, перечисленный в пределах списка элементов, причем не исключаются любые сочетания элементов в списке элементов. Это определение также допускает присутствие, если необходимо, других элементов, отличных от элементов, в частности идентифицированных в пределах списка элементов, к которым ссылается фраза «по меньшей мере, один», при этом они могут быть связанными или несвязанными с идентифицированными в частности элементами. Таким образом, в качестве не ограничивающего примера выражение «по меньшей мере, один из А и В» (или, эквивалентно, «по меньшей мере, один из А или В», или эквивалентно, «по меньшей мере, один из А и/или В») может ссылаться в одном варианте, по меньшей мере к одному А, если необходимо, включающему больше одного, при отсутствии В (и, если необходимо, включающему элементы отличные от В); в другом варианте по меньшей мере к одному В, если необходимо, включающему больше одного, при отсутствии А (и, если необходимо, включающему элементы отличные от А); еще в одном варианте по меньшей мере к одному А, если необходимо, включающему больше одного, и, по меньшей мере к одному В, если необходимо, включающему больше одного (и, если необходимо, включающему другие элементы); и т.д.
В формуле изобретения, а также в приведенном выше описании все переходные фразы, такие как «содержащий», «включающий», «несущий», «имеющий», «содержащий в себе», «включающий в себя», «несущий», «составленный из», и тому подобное следует понимать как открытый, то есть означать включающий, но не ограничивающийся им. Только переходные фразы «состоящий из» и «состоящий, по существу, из» должны быть закрытыми или полузакрытыми переходными фразами, соответственно, как указано в Руководстве по процедурам патентной экспертизы Патентного ведомства США, раздел 2111.03.
Формула изобретения не должна рассматриваться как ограниченная описанным порядком или элементами, если не указано иное. Следует понимать, что специалистом в данной области техники могут быть сделаны различные изменения в форме и деталях без отклонения от сущности и объема прилагаемой формулы изобретения. Заявлены все варианты осуществления, которые соответствуют сущности и объему следующей формулы изобретения и ее эквивалентам.
Группа изобретений относится к способам и системам передачи мощности на ременной основе. Предложен способ использования ремня для углового привода, включающий этапы, на которых применяют перекрученную геометрию к первому свободному промежутку ремня, поддерживают первый свободный промежуток ремня посредством свободно вращающегося шкива или ведомого шкива на первом конце первого свободного промежутка и осуществляют по меньшей мере одно из позиционирования и ориентации свободно вращающегося шкива или ведомого шкива. Устройство для использования ремня для углового привода содержит в том числе узел поддержки шкива, вмещающий свободно вращающийся шкив и/или ведомый шкив и выполненный с возможностью позиционирования и/или ориентации свободно вращающегося шкива и/или ведомого шкива. Достигается уменьшение габаритных размеров. 2 н. и 13 з.п. ф-лы, 25 ил.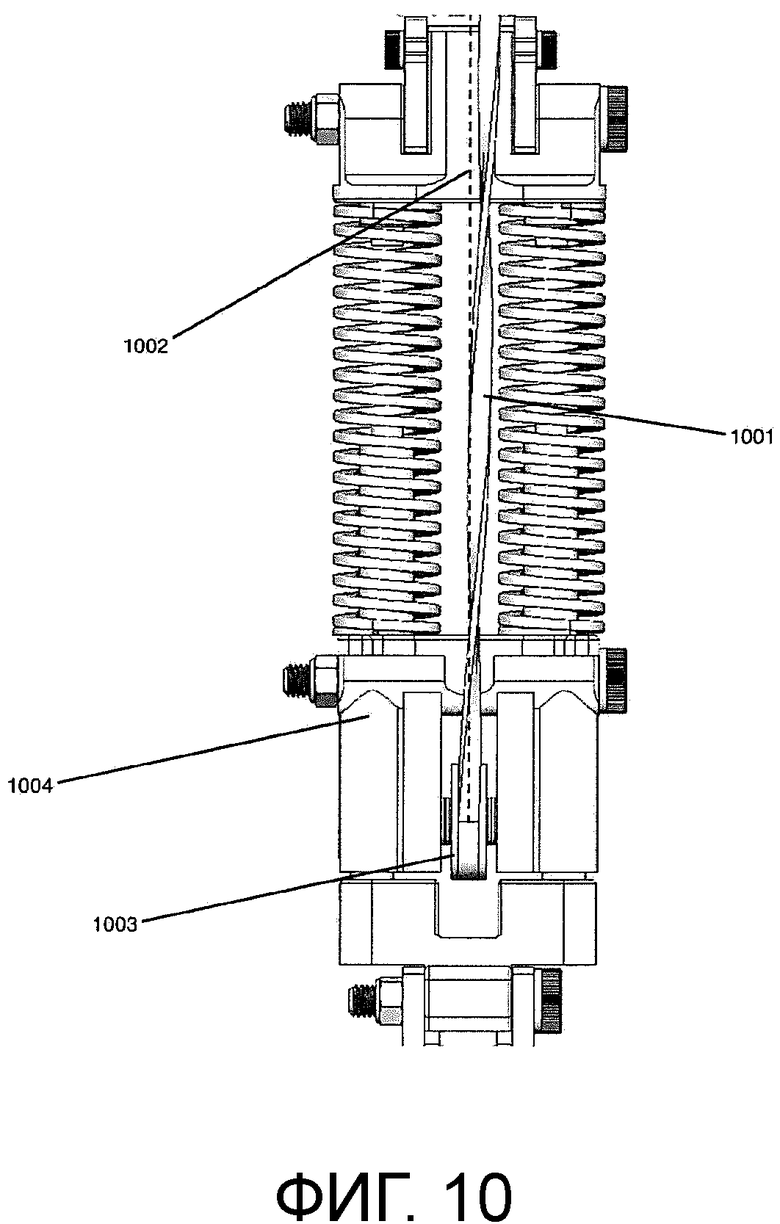
1. Способ использования ремня для углового привода, включающий этапы, на которых:
применяют перекрученную геометрию к первому свободному промежутку ремня;
поддерживают первый свободный промежуток ремня посредством свободно вращающегося шкива или ведомого шкива на первом конце первого свободного промежутка; и
осуществляют по меньшей мере одно из позиционирования и ориентации свободно вращающегося шкива или ведомого шкива, с тем чтобы сместить геометрическую осевую линию первого свободного промежутка ремня под заданным углом наклона относительно второго конца первого свободного промежутка.
2. Способ по п. 1, в котором направление и величина смещения заданного угла наклона первого свободного промежутка ремня является соизмеримой с таковой у нескрученного и смещенного второго свободного промежутка ремня с опорным шкивом, у которого полный перепад натяжения через нескрученный и смещенный второй свободный промежуток ремня от одного края к противоположному краю на границе зацепления нескрученного и смещенного второго свободного промежутка ремня, по существу, является противоположным полному перепаду натяжения от одного края до противоположного края первого свободного промежутка на границе зацепления первого свободного промежутка, имеющего перекрученную геометрию.
3. Способ по п. 1, в котором первый свободный промежуток ремня содержит перекрученную геометрию, имеющую отношение перекручивания 20:1 или менее, и имеющую заданный угол наклона в диапазоне от 0,25 до 1,5 градусов.
4. Способ по п. 1, в котором свободно вращающийся шкив или ведомый шкив содержит один или более шкивов, имеющих одно измерение введенного смещения угла наклона для первого свободного промежутка ремня, который имеет перекрученный вход на одной границе зацепления шкива и прямой выход на другой границе зацепления шкива.
5. Способ по п. 1, в котором свободно вращающийся шкив или ведомый шкив содержит один или более шкивов, имеющих два измерения введенного смещения угла наклона для первого свободного промежутка ремня, который имеет перекрученный вход на одной границе зацепления шкива и прямой выход на другой границе зацепления шкива.
6. Способ по п. 1, в котором свободно вращающийся шкив или ведомый шкив содержит один или более шкивов с фланцами.
7. Способ по п. 1, в котором свободно вращающийся шкив или ведомый шкив, расположенный на первом конце первого свободного промежутка ремня, расположен ортогонально по отношению к другому шкиву, расположенному на втором конце первого свободного промежутка ремня.
8. Устройство для использования ремня для углового привода, содержащее:
ремень, имеющий свободный промежуток, выполненный в перекрученной геометрии, имеющей отношение перекручивания 15:1 или менее;
по меньшей мере один из свободно вращающегося шкива и ведомого шкива, поддерживающего первый конец свободного промежутка ремня; и
узел поддержки шкива, вмещающий свободно вращающийся шкив и/или ведомый шкив и выполненный с возможностью позиционирования и/или ориентации свободно вращающегося шкива и/или ведомого шкива таким образом, чтобы сместить геометрическую осевую линию свободного промежутка ремня, выполненного в перекрученной геометрии, при этом свободный промежуток ремня смещен под заданным углом наклона относительно неподвижного шкива, расположенного на втором конце свободного промежутка ремня, причем узел поддержки шкива выполнен с возможностью удержания свободно вращающегося шкива и/или ведомого шкива с заданным углом наклона для сохранения смещения.
9. Устройство по п. 8, в котором узел поддержки шкива выполнен с возможностью скольжения.
10. Устройство по п. 8, в котором узел поддержки шкива выполнен с возможностью поворота.
11. Устройство по п. 8, в котором неподвижный шкив является ортогональным к свободно вращающемуся шкиву и/или ведомому шкиву.
12. Устройство по п. 8, в котором свободно вращающийся шкив или ведомый шкив содержит один или более шкивов с фланцами.
13. Устройство по п. 12, в котором ремень является плоским ремнем.
14. Устройство по п. 13, в котором плоский ремень состоит по меньшей мере частично по меньшей мере из одного из стали, арамида, полиэстера, полиуретана и армированного синтетического волокна.
15. Устройство по п. 14, в котором шкивы с фланцами имеют ширину между фланцами шкивов, которая по меньшей мере на 1 мм шире, чем плоский ремень.
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2013 |
|
RU2549428C2 |
| WO 2008118259 А1, 02.10.2008 | |||
| RU 94032290 A1, 10.08.1996 | |||
| Шкив клиноременного вариатора | 1978 |
|
SU1133453A1 |
| УСТРОЙСТВО ДЛЯ ДЕМПФИРОВАНИЯ ВИБРАЦИЙ В ПРИВОДНЫХ МЕХАНИЗМАХ С ГИБКОЙ СВЯЗЬЮ | 2003 |
|
RU2308624C2 |
| FR 1169050 A, 19.12.1958 | |||
| US 8197372 B2, 12.06.2012. | |||

