ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет по предварительной заявке на патент США № 62/555,944, поданной 8 сентября 2017 г., озаглавленной «Полиспаст для плоских ремней», которая включена сюда путем ссылки во всей ее полноте.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к конструкции систем линейного привода, приводимых в действие вращательными двигателями и приводимых в движение современными плоскими полиуретановыми ремнями, армированными сталью.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
Плоские ремни были изобретены для решения проблем, которые присутствуют у подъемных систем на основе проволочного троса, таких как их требования к смазке, относительно низкий тяговый потенциал и малый срок службы. Достижения в области материаловедения позволили создать прочную и долговечную полиуретановую оболочку, которая защищает несколько проволочных тросов, расположенных параллельно, что позволяет использовать меньшие тяговые барабаны, одновременно увеличивая ожидаемый срок службы в 3 раза и более. Усиленные сталью полиуретановые ремни отличаются высокой производительностью, долговечностью и не требуют технического обслуживания. Сочетание черт, которые быстро получили распространение в грузоподъемной индустрии. В настоящее время они находят применение в других колебательных линейных применениях, таких как ножничные подъемники, вилочные погрузчики и тренажеры, благодаря своей способности эффективно передавать мощность без технического обслуживания в течение длительного периода времени.
При проектировании систем, в которых используются плоские ремни, необходимо соблюдать осторожность, поскольку они чувствительны к значительным отклонениям угла наклона, подобно другим конструкциям усиленных ремней. Небольшие углы наклона, которые в противном случае были бы совершенно приемлемы для системы с проволочным тросом, являются значительно более вредными для систем на основе ремня. Конструкции полиспастов на основе тросов дают преимущество механического понижения, но вводят углы наклона для полиспастной системы, особенно когда необходимы передаточные отношения более 4:1. Тросы известны своей стойкостью к углам наклона, и поэтому в таких ситуациях всегда хорошо себя зарекомендовали. С другой стороны, ремни не могут быть легко применены для топологий полиспаста, так как даже малейший из углов наклона является достаточным для существенного сокращения ожидаемого срока службы системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В целом, это изобретение относится к системам линейного привода, которые сконфигурированы для развертывания с системой с плоским ремнем.
В одном аспекте изобретения система линейного привода включает в себя шасси привода, имеющего главную ось привода.
Система включает в себя первое множество шкивов, соединенных соответственно с первым валом, соединенным с шасси привода. Первое множество шкивов включает в себя шкивы, имеющие ось вращения, которая совпадает с первым валом. Шкивы в первом множестве шкивов разнесены друг от друга на непостоянный интервал. Шкивы в первом множестве шкивов имеют разные диаметры осевой линии шкива относительно друг друга. Система включает в себя второе множество шкивов, соединенных соответственно со вторым валом, соединенным с шасси привода. Второе множество шкивов включает в себя шкивы, имеющие ось вращения, которая совпадает со вторым валом. Шкивы во втором множестве шкивов разнесены друг от друга на непостоянное расстояние, причем шкивы во втором множестве шкивов имеют разные диаметры осевой линии шкива относительно друг друга. По меньшей мере, один из первого вала и второго вала выполнен с возможностью перемещения вдоль главной оси привода. Первый вал и второй вал расположены вдоль главной оси привода и смещены относительно друг друга на статичный угол поворота вокруг главной оси привода. Точки на соответствующих концах отрезков, продолжающихся вдоль геометрической осевой линии каждого шкива в первом множестве шкивов и втором множестве шкивов, лежат вдоль общего окружного профиля, ортогонального к главной оси привода.
В определенных вариантах реализации, система линейного привода включает в себя один или несколько из следующих дополнительных признаков. Система линейного привода может включать в себя плоский ремень, продолжающийся от первой оконечной точки до первого множества шкивов и вокруг них, до второго множества шкивов и вокруг них и до второй оконечной точки. Система линейного привода может включать элемент передачи, выполненный с возможностью зацепления с плоским ремнем. Элемент передачи может включать в себя электрический двигатель и/или один или несколько направляющих роликов. Система линейного привода может включать в себя по меньшей мере один приводной вал, подвижно соединенный с шасси привода для перемещения вдоль главной оси привода. В некоторых вариантах осуществления, спроектированная геометрическая осевая линия по меньшей мере из 6 шкивов пересекает общий окружной профиль определенного размера, ортогональный к главной оси привода. Каждый шкив может иметь ось вращения, совпадающую с его сопряженным валом.
В одном аспекте изобретения, система линейного привода с ременной передачей включает в себя шасси привода и приводной вал, подвижно соединенный с шасси привода для перемещения вдоль оси. Система включает в себя первое множество внешних шкивов и второе множество внешних шкивов, соединенных соответственно с первым внешним валом и вторым внешним валом. Первое множество внешних шкивов и второе множество внешних шкивов выполнены с возможностью свободного вращения вокруг первого внешнего вала и второго внешнего вала, соответственно. Первый внешний вал и второй внешний вал соединены с возможностью вращения с шасси привода и закреплены сбоку относительно шасси привода. Система включает в себя первое множество внутренних шкивов и второе множество внутренних шкивов, соединенных соответственно с первым внутренним валом и вторым внутренним валом. Первое множество внутренних шкивов и второе множество внутренних шкивов выполнены с возможностью свободного вращения вокруг первого внутреннего вала и второго внутреннего вала, соответственно. Первый внутренний вал и второй внутренний вал выполнены с возможностью перемещения вдоль оси в шасси привода для приведения в действие приводного вала.
Система включает в себя плоский ремень, продолжающийся от первой оконечной точки до и вокруг: первого множества внутренних шкивов, первого множества внешних шкивов, второго множества внутренних шкивов, второго множества внешних шкивов и до второй оконечной точки. Первый внешний вал и первый внутренний вал наклонены относительно друг друга на статичный угол поворота вокруг оси, и второй внешний вал и второй внутренний вал наклонены относительно друг друга на статичный угол поворота вокруг оси с тем, чтобы устранить углы наклона.
В определенных вариантах реализации, система линейного привода с ременной передачей включает в себя один или несколько из следующих дополнительных признаков. Система линейного привода с ременной передачей может включать в себя шкив перенаправления, соединенный с шасси привода и выполненный с возможностью соединения с вращательным приводом. Плоский ремень может продолжаться от первой оконечной точки, затем к и вокруг первого множества внешних шкивов, затем к и вокруг шкива перенаправления, затем вокруг второго множества внутренних шкивов, затем к и вокруг второго множества внешних шкивов, и затем ко второй оконечной точке. Система линейного привода с ременной передачей может включать в себя вращательный привод. Вращательный привод может быть выполнен с возможностью вращения вперед и назад. Шасси привода может включать в себя крышку корпуса, расположенную вокруг шасси привода и по меньшей мере участок приводного вала может перемещаться в и из крышки корпуса.
Первый внутренний вал и второй внутренний вал могут быть выполнены с возможностью перемещения вдоль оси в одном и том же направлении, посредством чего расстояние между первым множеством внешних шкивов и первым множеством внутренних шкивов выполнено с возможностью увеличения одновременно с уменьшением расстояния между вторым множеством внешних шкивов и вторым множеством внутренних шкивов и, посредством чего, расстояние между первым множеством внешних шкивов и первым множеством внутренних шкивов выполнено с возможностью уменьшения одновременно с увеличением расстояния между вторым множеством внешних шкивов и вторым множеством внутренних шкивов. Первый внутренний вал и второй внутренний вал могут быть выполнены с возможностью качания вдоль оси.
Система линейного привода с ременной передачей может включать в себя вращательный привод, соединенный со шкивом перенаправления.
Каждый из первого множества внешних шкивов, второго множества внешних шкивов, первого множества внутренних шкивов и второго множества внутренних шкивов содержит шкивы, которые могут иметь разные диаметры. Шкивы, имеющие разные диаметры, могут быть параллельны друг другу. Расстояние между параллельными шкивами может быть непостоянным. Расстояние между параллельными шкивами может уменьшаться по мере уменьшения диаметра шкивов.
Система линейного привода с ременной передачей может включать в себя упорные шайбы, расположенные между шкивами, для обеспечения расстояния между параллельными шкивами. Шкивы могут уменьшаться в диаметре в осевом направлении наружу.
Определенные аспекты обеспечивают способы приведения в действие системы линейного привода с ременной передачей. Способы включают подачу питания на вращательный привод, соединенный прямо или косвенно с плоским ремнем, согласно одной или нескольким системам линейного привода, описанным в данном документе.
Определенные аспекты обеспечивают способы изготовления системы линейного привода согласно одной или нескольких систем линейного привода, описанных в данном документе.
В данном документе раскрыты способы, системы и компоненты для проектирования конструкции полиспаста на основе плоского ремня, теоретически не имеющего углов наклона. Технология отображения формирует набор плоских положений для осевых линий свободных промежутков, которые обеспечивают множество геометрий шкивов, которые располагаются на общей оси и промежутки которых являются свободными от углов наклона на границах зацепления шкива.
Настоящее изобретение позволяет использовать высокоэффективные плоские ремни в топологиях полиспастов с высоким понижением (6:1 или более) с главными преимуществами увеличенного срока службы, высокой эффективностью передачи мощности, более эффективной передачей тягового усилия и компактным дизайном машины.
В определенных реализациях, одна или две топологии полиспастов на основе ремня объединены с фрикционным приводом для образования электрического линейного привода, приводимого в действие электрическим двигателем. Электрический линейный привод может использоваться в применениях для замены гидравлики, в строительном оборудовании, погрузочно-разгрузочном оборудовании и производственном оборудовании. Эти применения могут включать, но не ограничиваются ими, вилочные погрузчики, штабелеры, тележки, подъемники, грузовики, ножничные подъемники, системы имитации движения и оборудование для добычи нефти.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Специалисту в данной области следует понимать, что чертеж в основном предназначен для иллюстративных целей и не предназначен для ограничения объема предмета изобретения, описанного в данном документе. Чертежи не обязательно выполнены в масштабе; в некоторых случаях различные аспекты предмета изобретения, раскрытого в данном документе, могут быть показаны преувеличенными или увеличенными на чертежах, чтобы облегчить понимание различных признаков. На чертежах, одинаковые ссылочные позиции обычно указывают на одинаковые, функционально аналогичные и/или структурно аналогичные элементы.
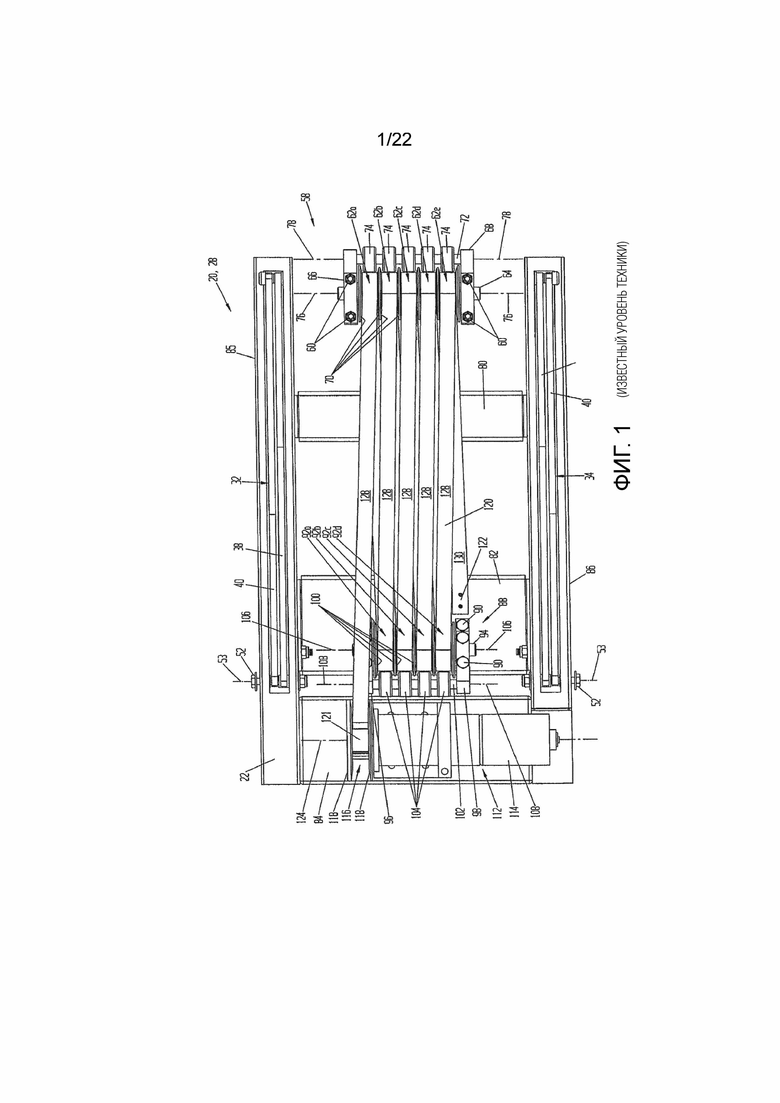
Фиг.1 иллюстрирует предшествующий уровень техники, понижающий привод полиспаста, приводимый в действие системой барабанов, которая содержит углы наклона.
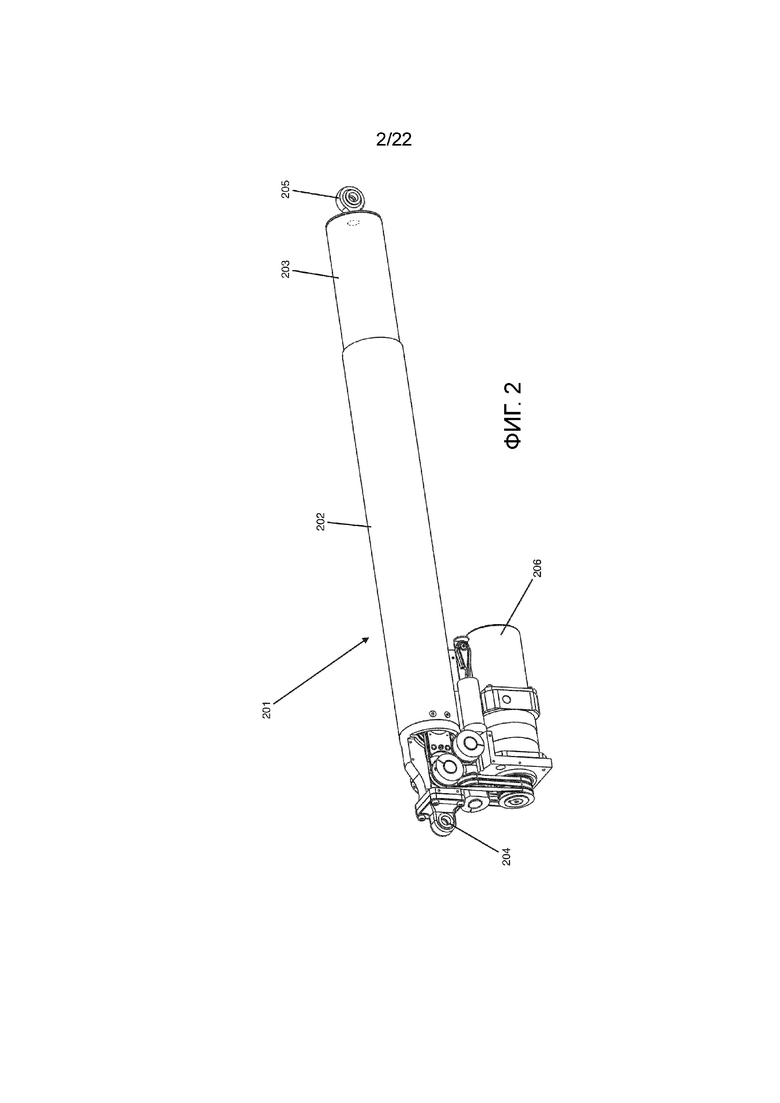
Фиг.2 изображает изометрический вид линейного привода во всей его полноте.
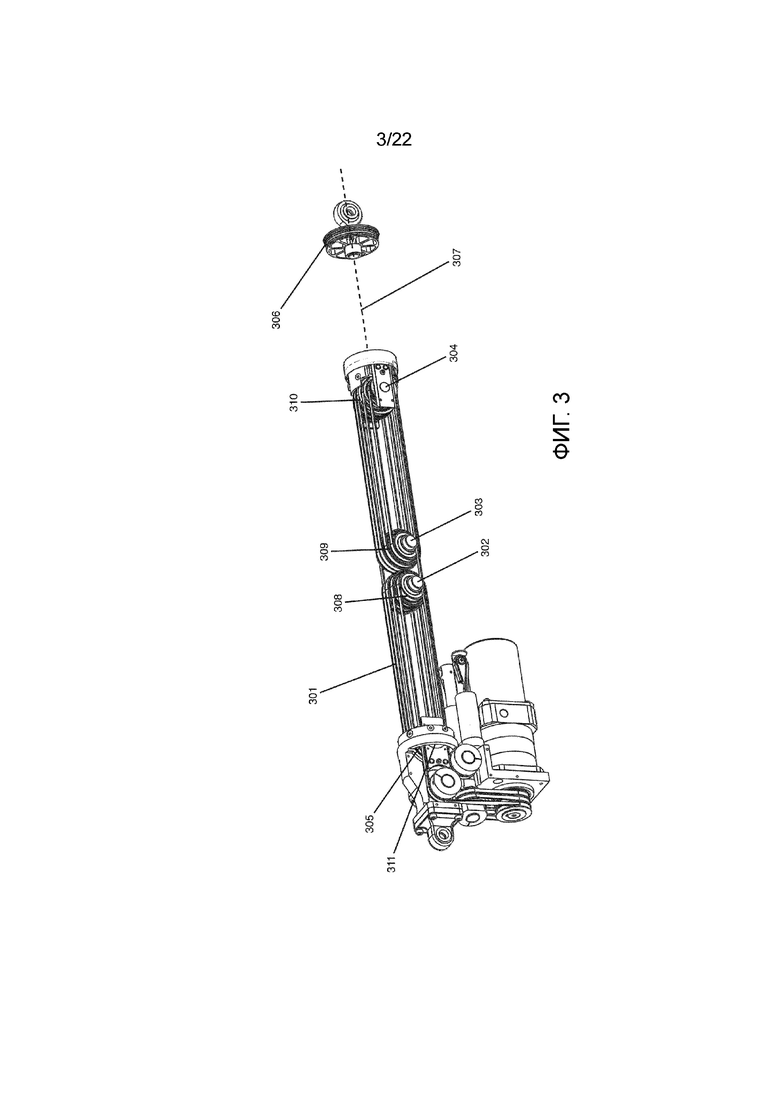
Фиг.3 показывает изометрический вид основных приводных элементов линейного привода с ременной передачей.
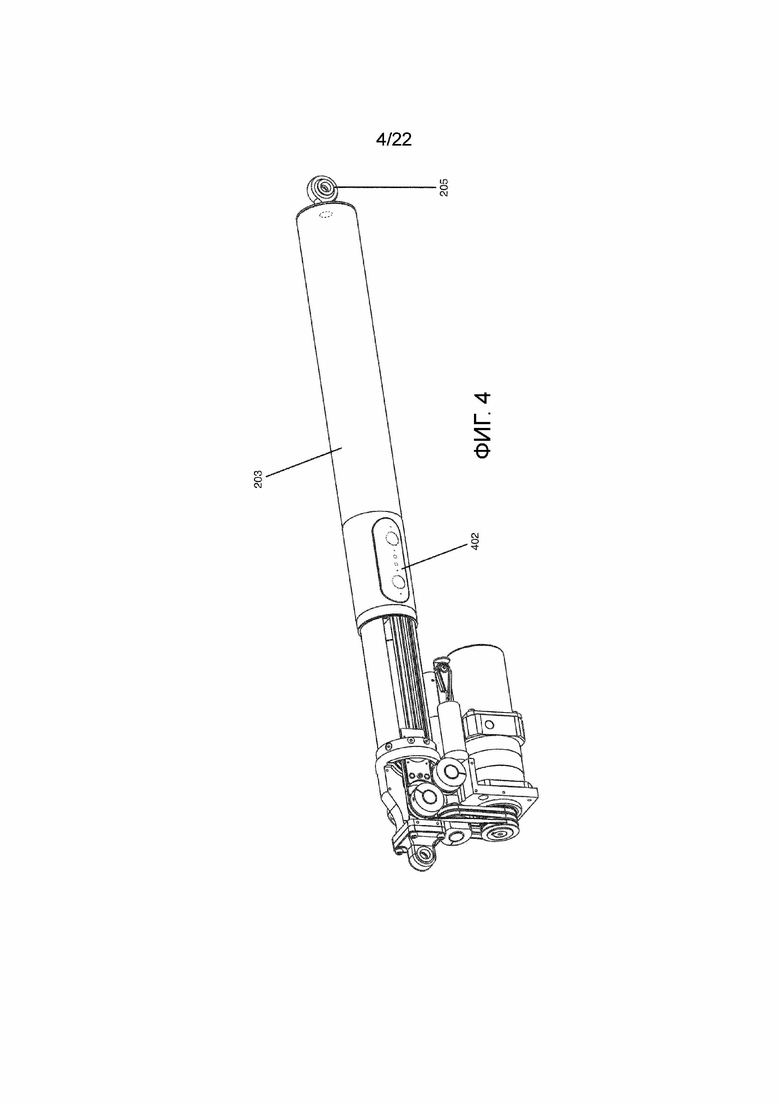
Фиг.4 представляет собой пример иллюстрации соединений выходного штока привода.
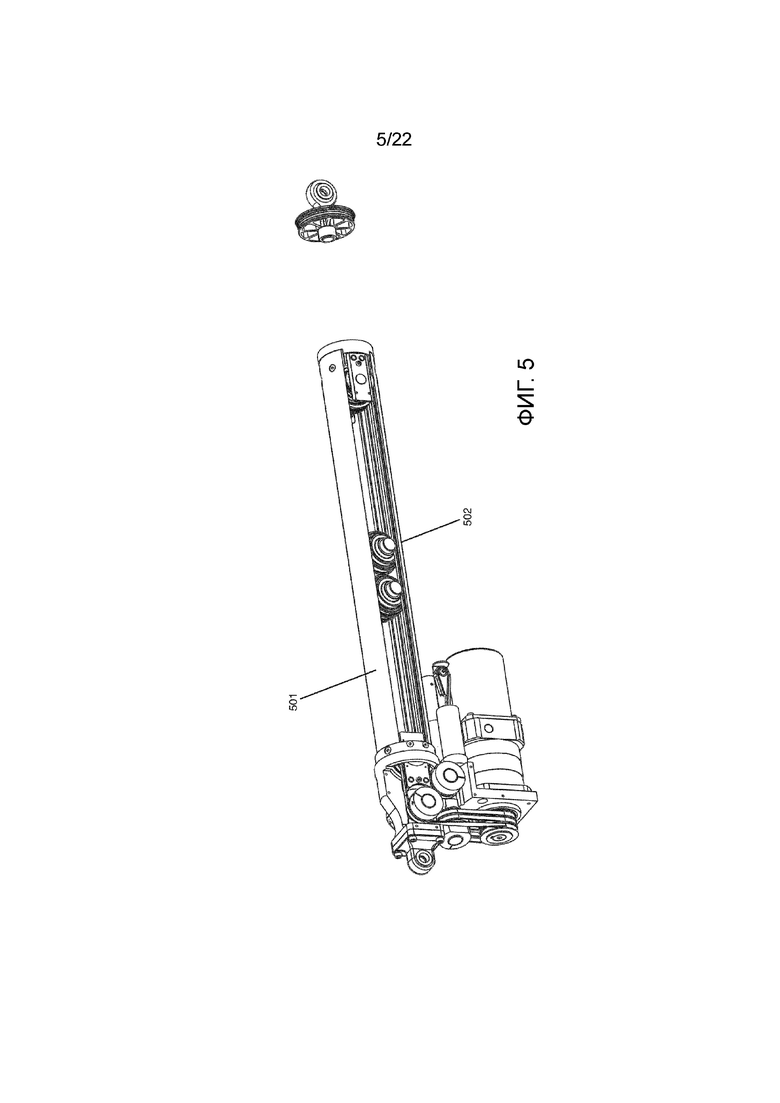
Фиг.5 показывает подробный изометрический вид основных структурных элементов привода.
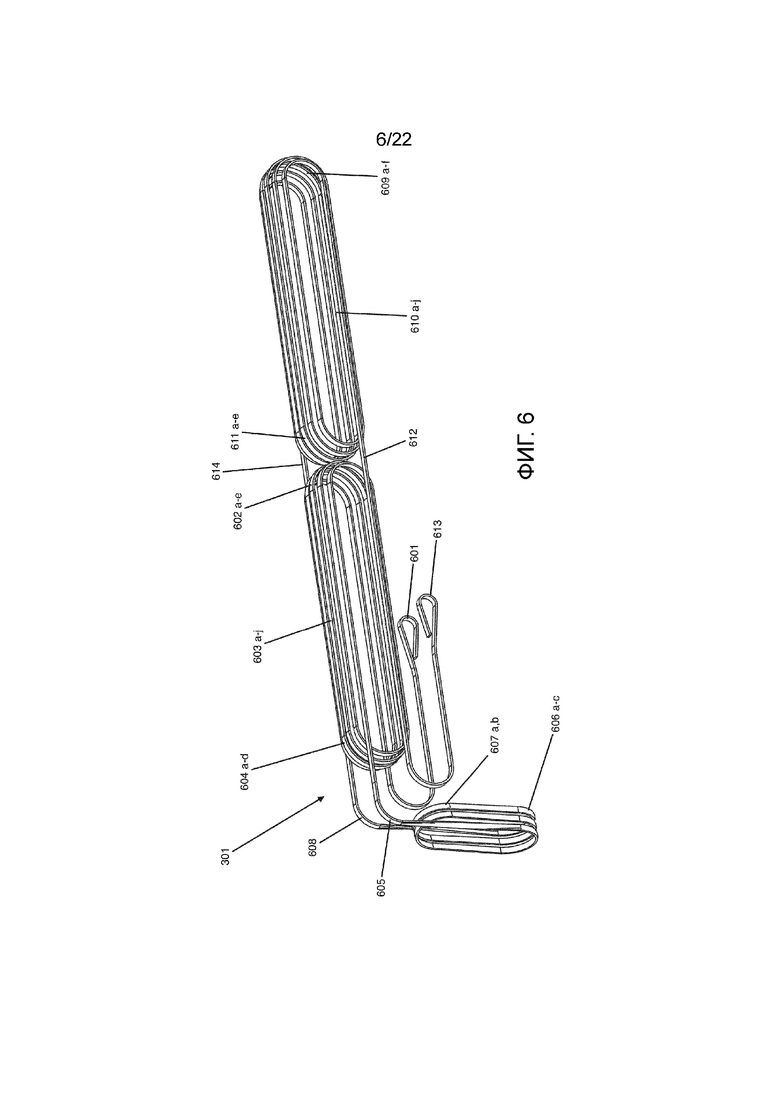
Фиг.6 представляет изометрический вид топологии отдельного ремня.
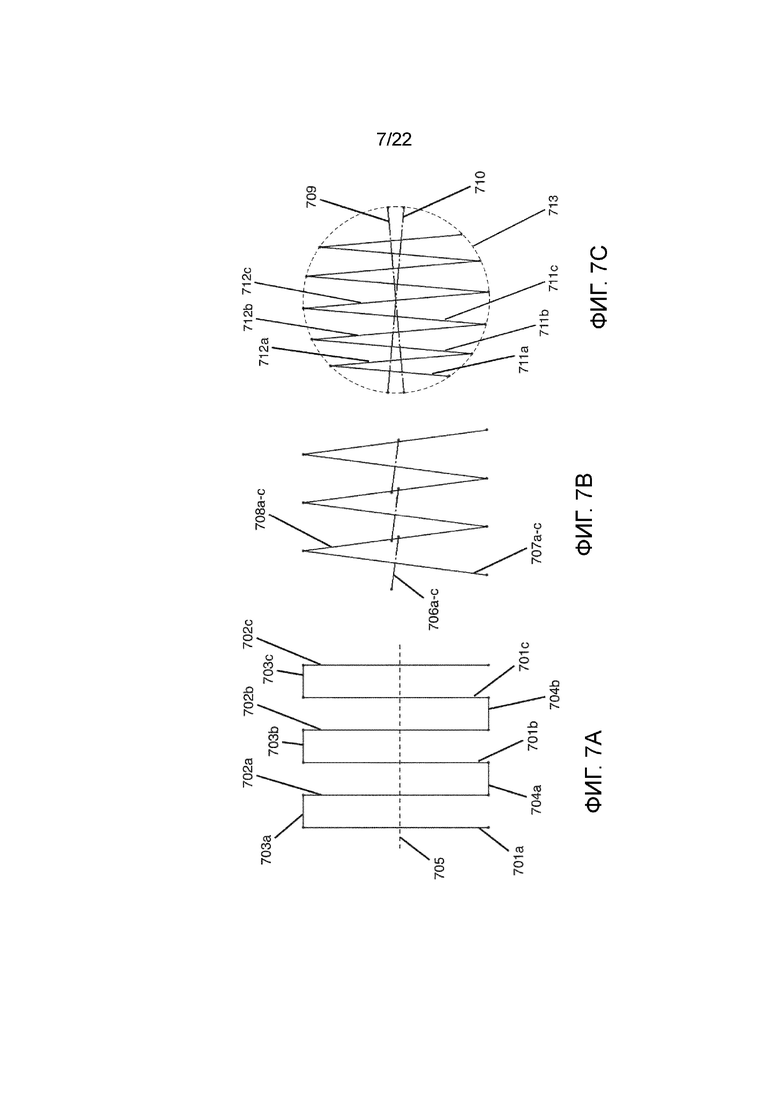
Фигуры 7A-7C представляют собой пример иллюстрации геометрического метода, используемого для предотвращения углов наклона в свободных промежутках полиспаста. Точка наблюдения принимается вдоль главной оси привода.
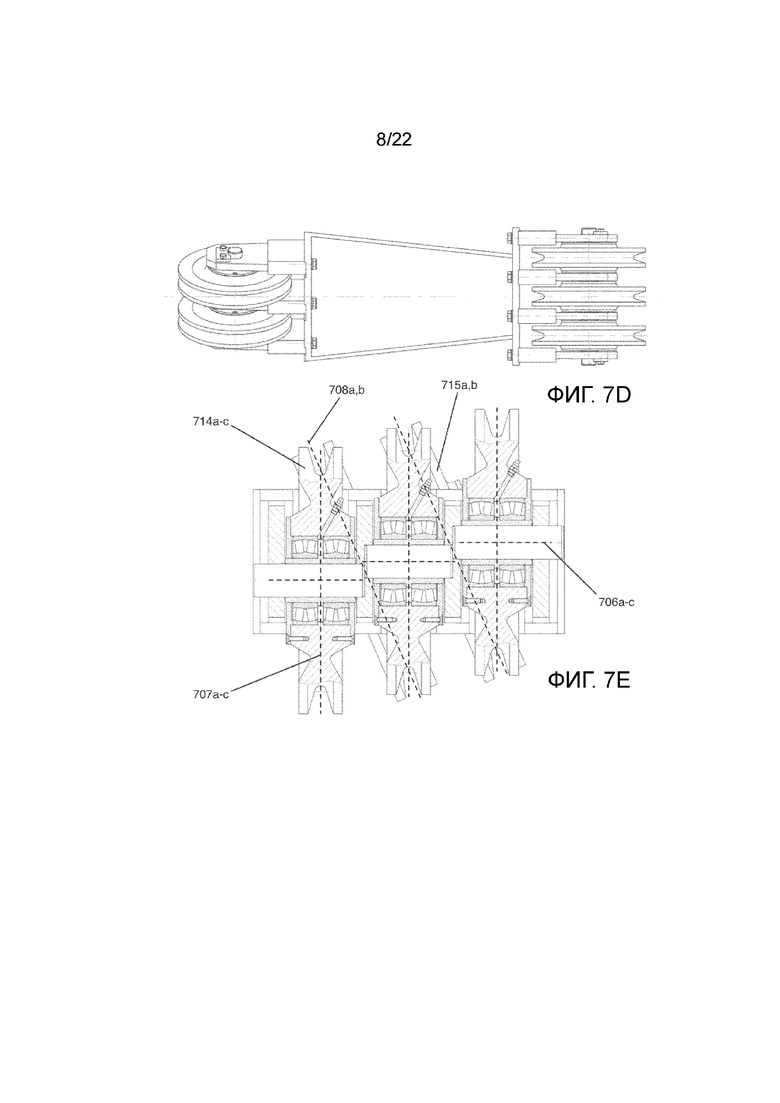
Фиг.7D-Фиг.7E иллюстрирует конструкцию машины, которая позволяет избегать углов наклона посредством способов предшествующего уровня техники.
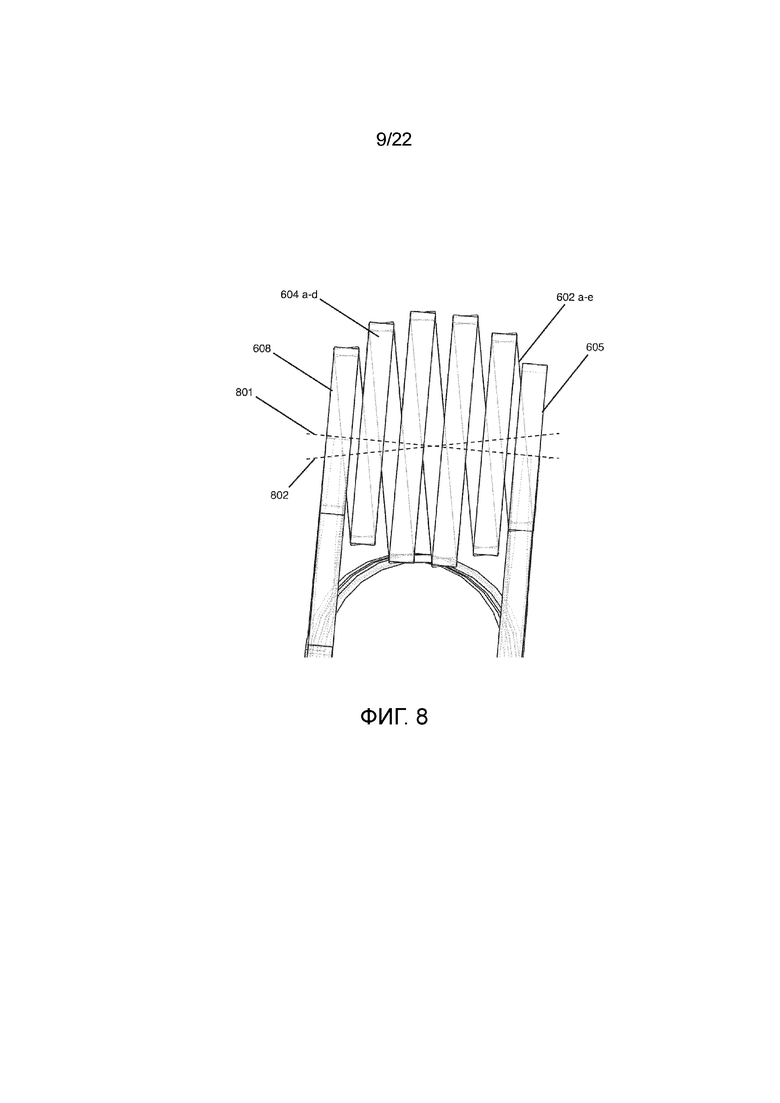
Фиг.8 изображает осевой вид топологии ремня.
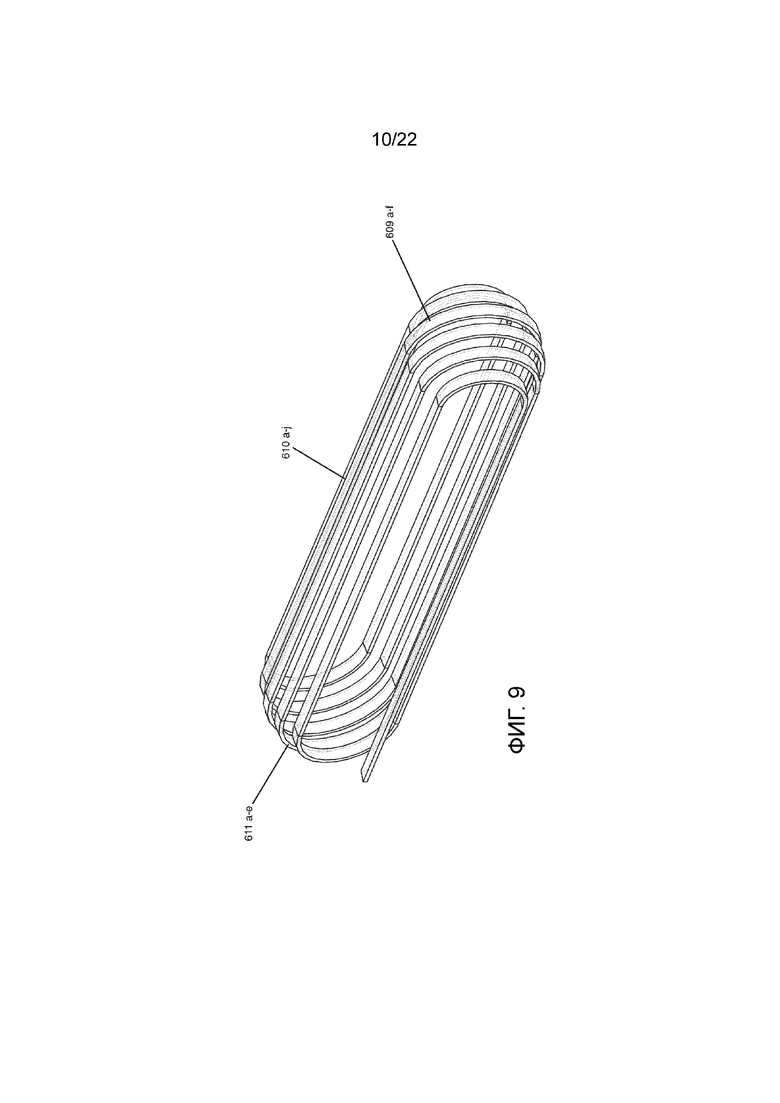
Фиг.9 показывает изометрический вид отдельного полиспаста на основе ремня.
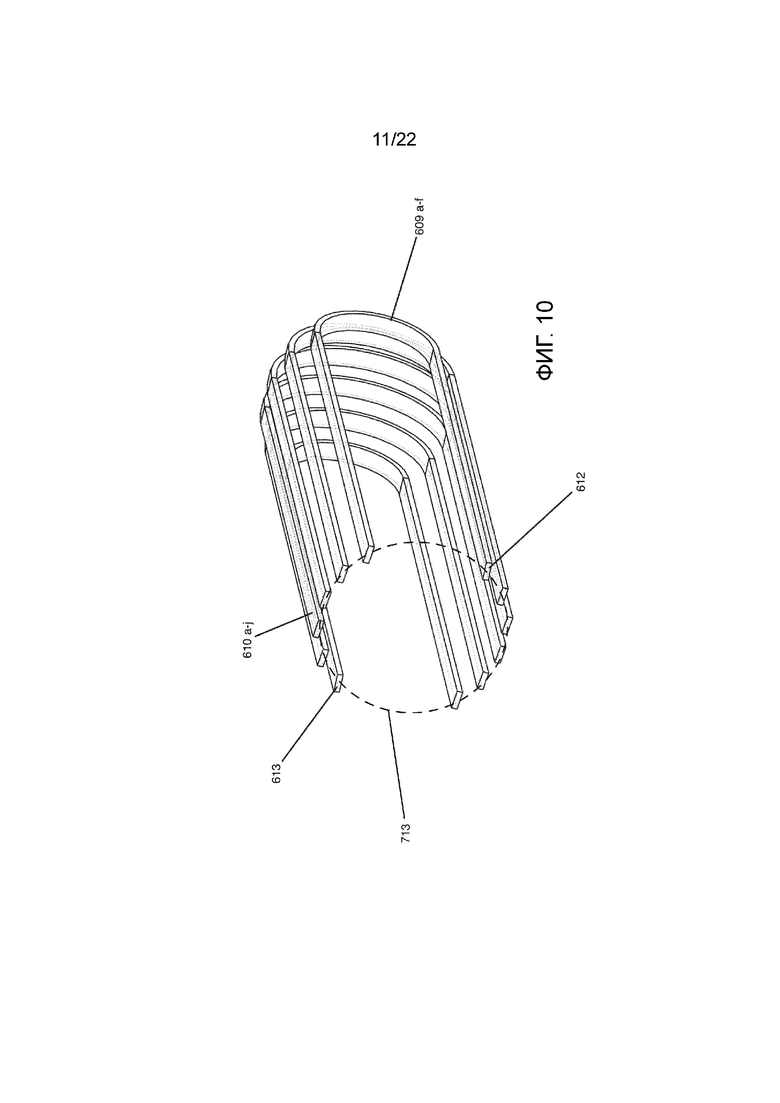
Фиг.10 изображает изометрический вид сечения отдельного полиспаста на основе ремня.
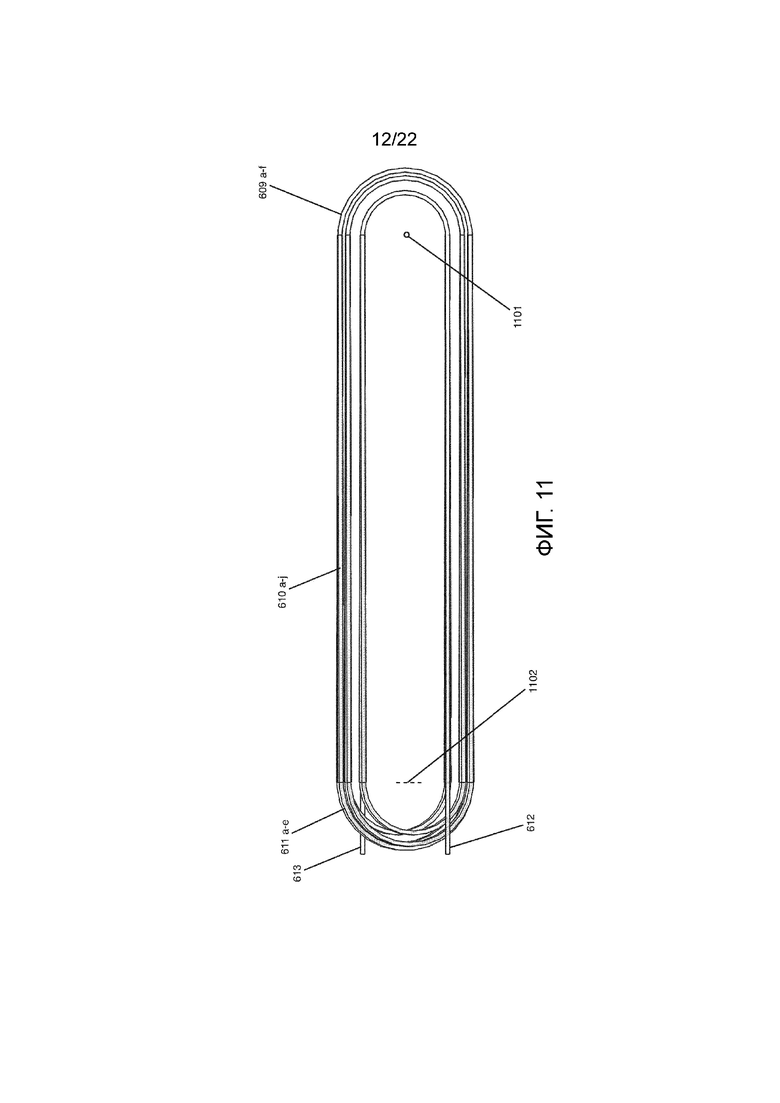
Фиг.11 показывает вид сбоку полиспаста на основе ремня, перпендикулярно оси правостороннего набора шкивов.
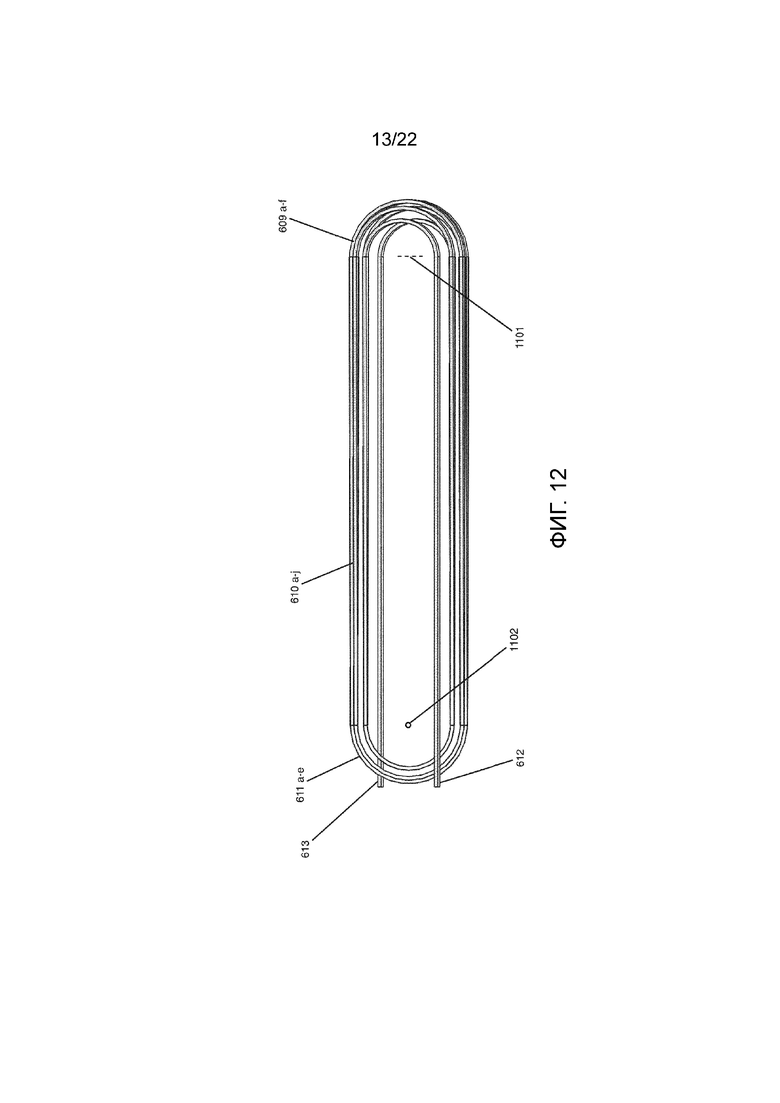
Фиг.12 показывает вид сбоку полиспаста на основе ремня, перпендикулярно оси левостороннего набора шкивов
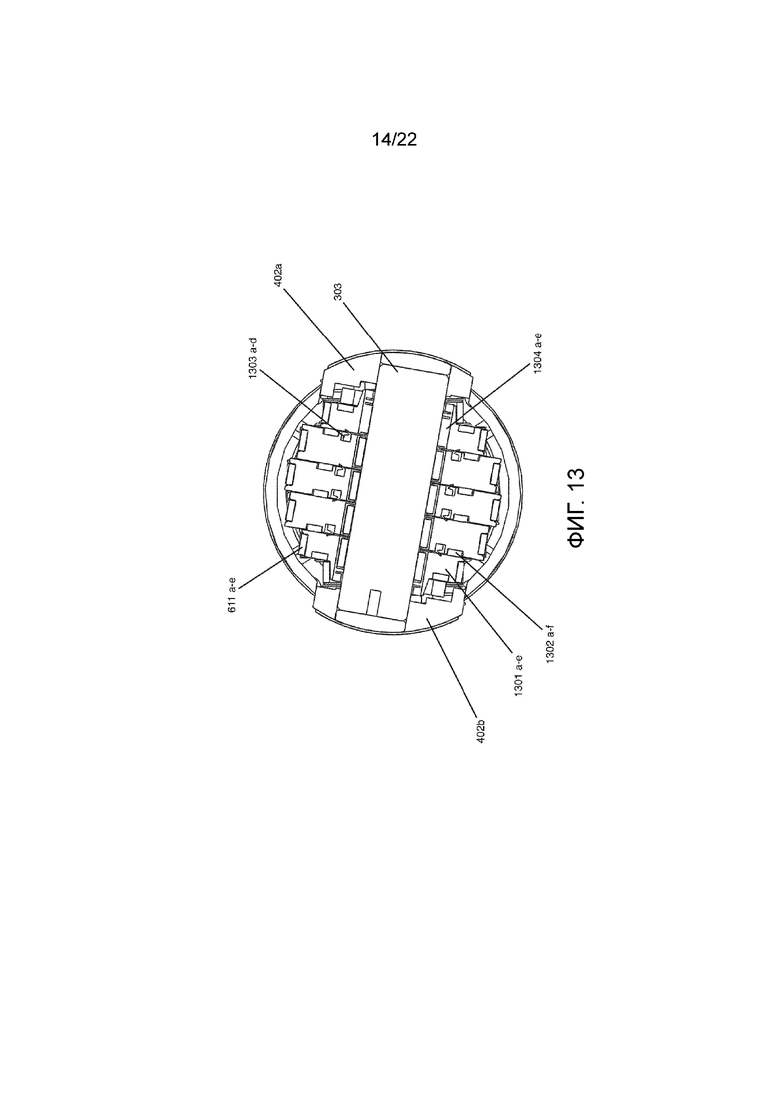
Фиг.13 представляет сечение набора шкивов, которые поддерживают ремень. Точка наблюдения принимается вдоль главной оси привода.
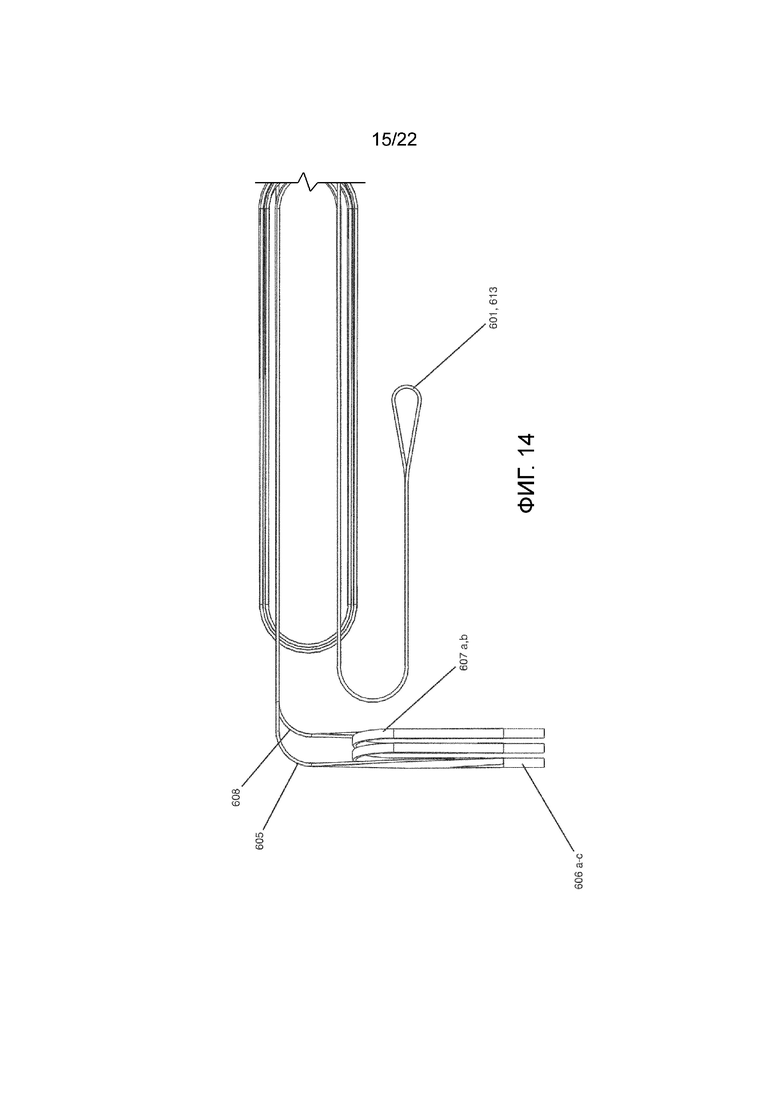
Фиг.14 иллюстрирует вид сбоку топологии ремня рядом с концом двигателя привода.
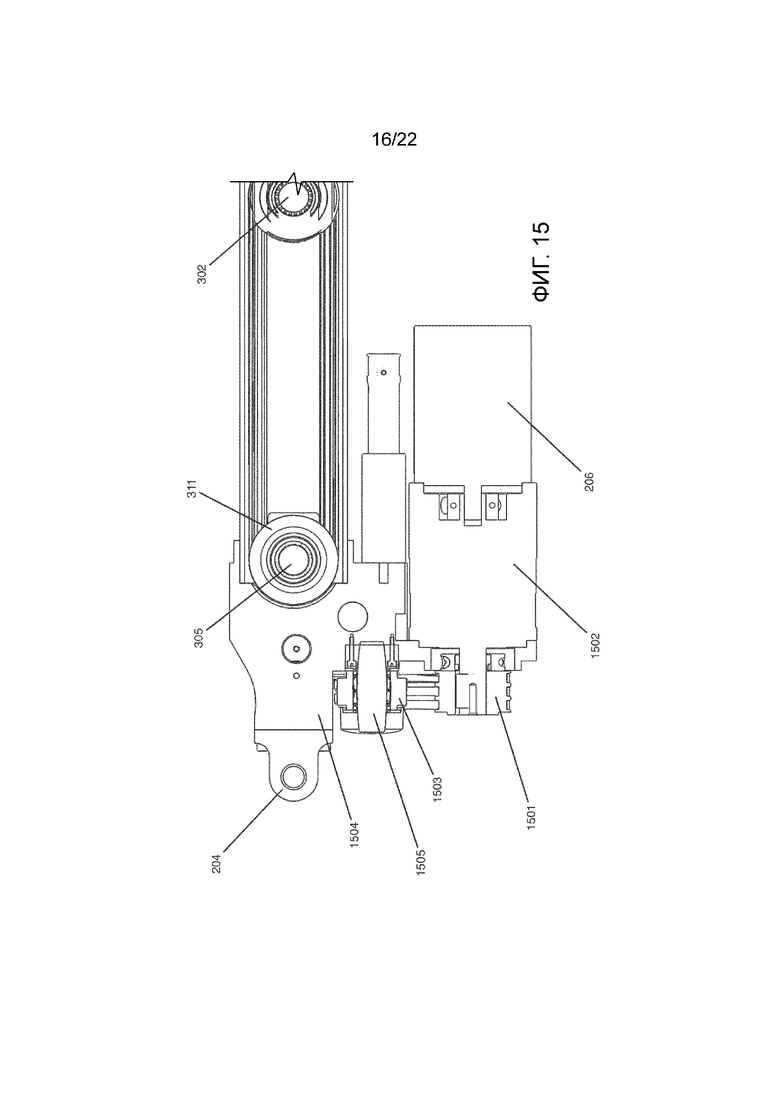
Фиг.15 показывает вид сбоку привода в сечении.
Фиг.16 представляет собой пример иллюстрации средства окончания концов ремня и механизма поддержки натяжения ремня.
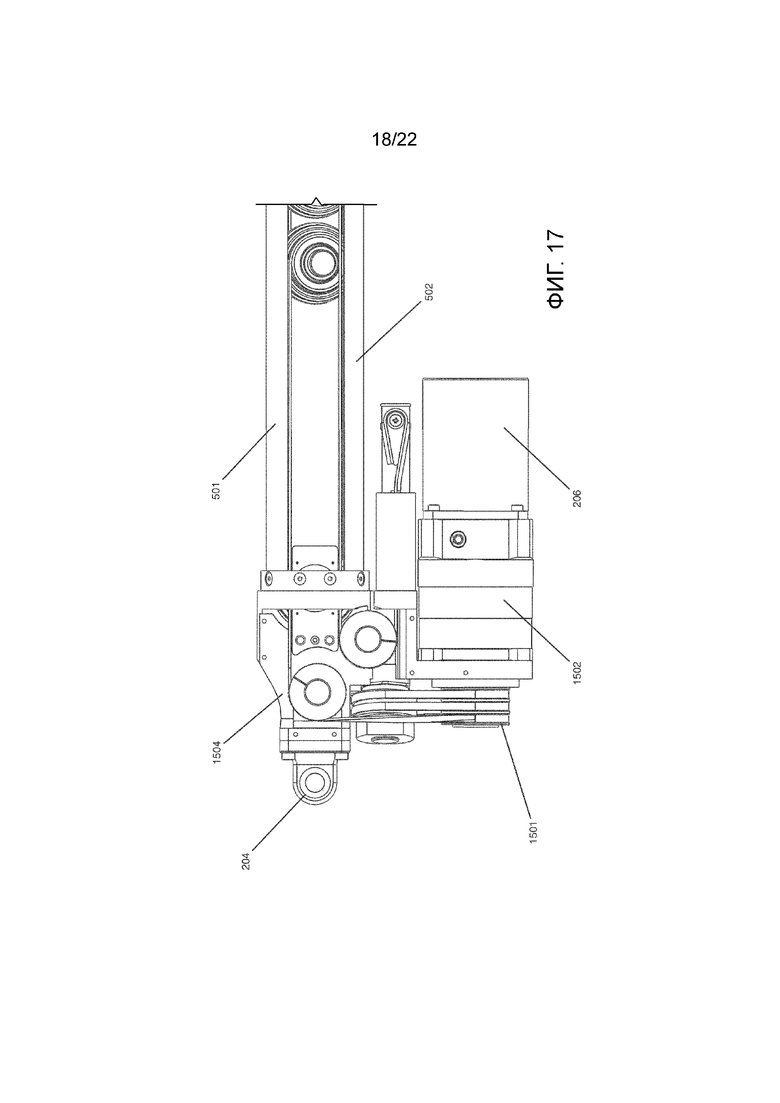
Фиг.17 показывает вид сбоку привода.
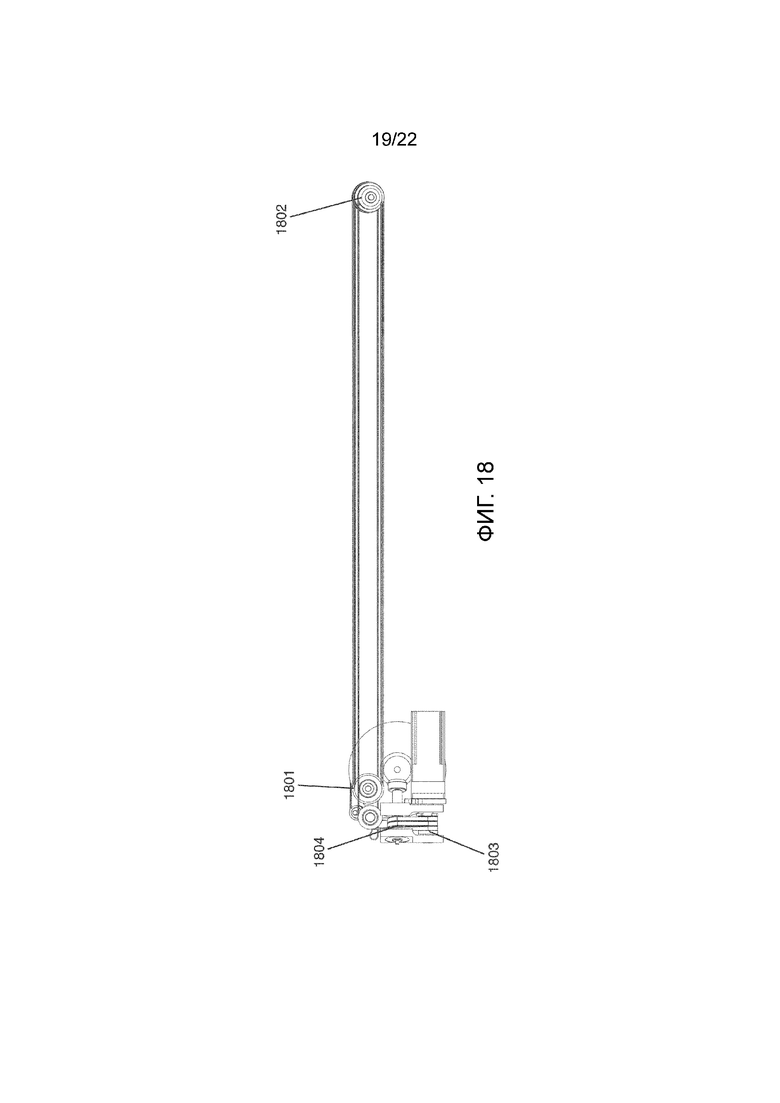
Фиг.18 иллюстрирует отдельные виды изобретения, действующие только на растяжение.
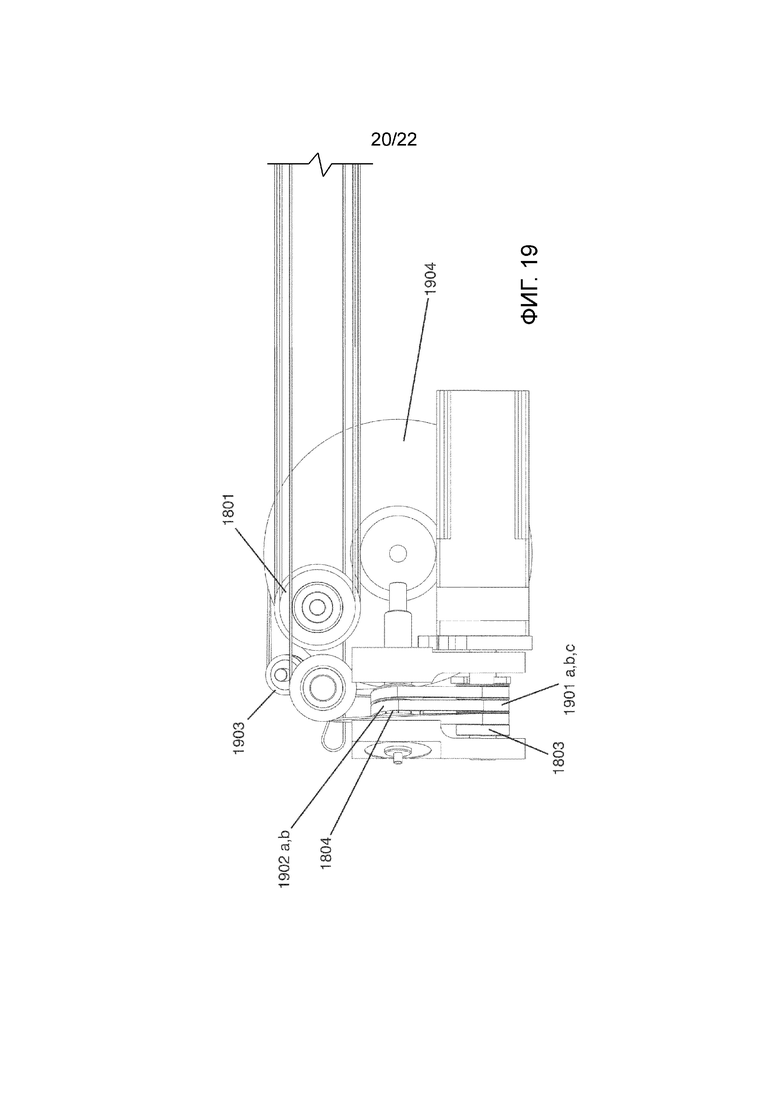
Фиг.19 представляет крупный план рамной структуры из отдельных видов.
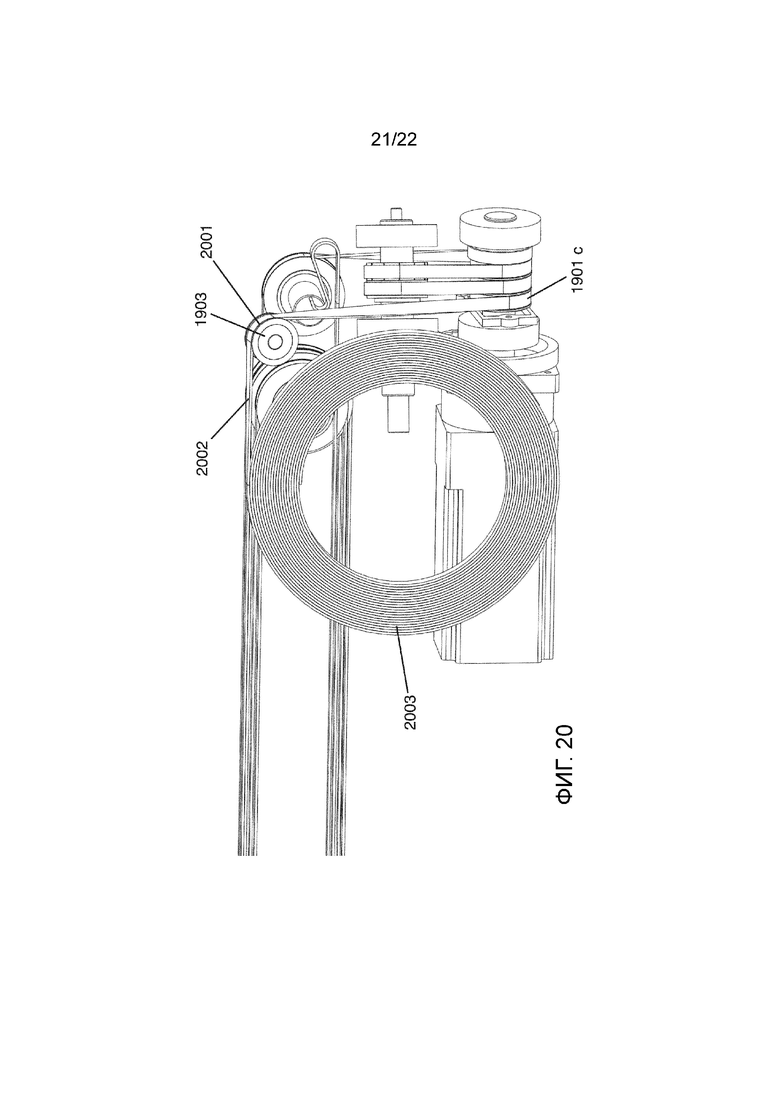
Фиг.20 показывает заднюю сторону видов только для натяжения по этому изобретению, иллюстрирующую топологию ремня.
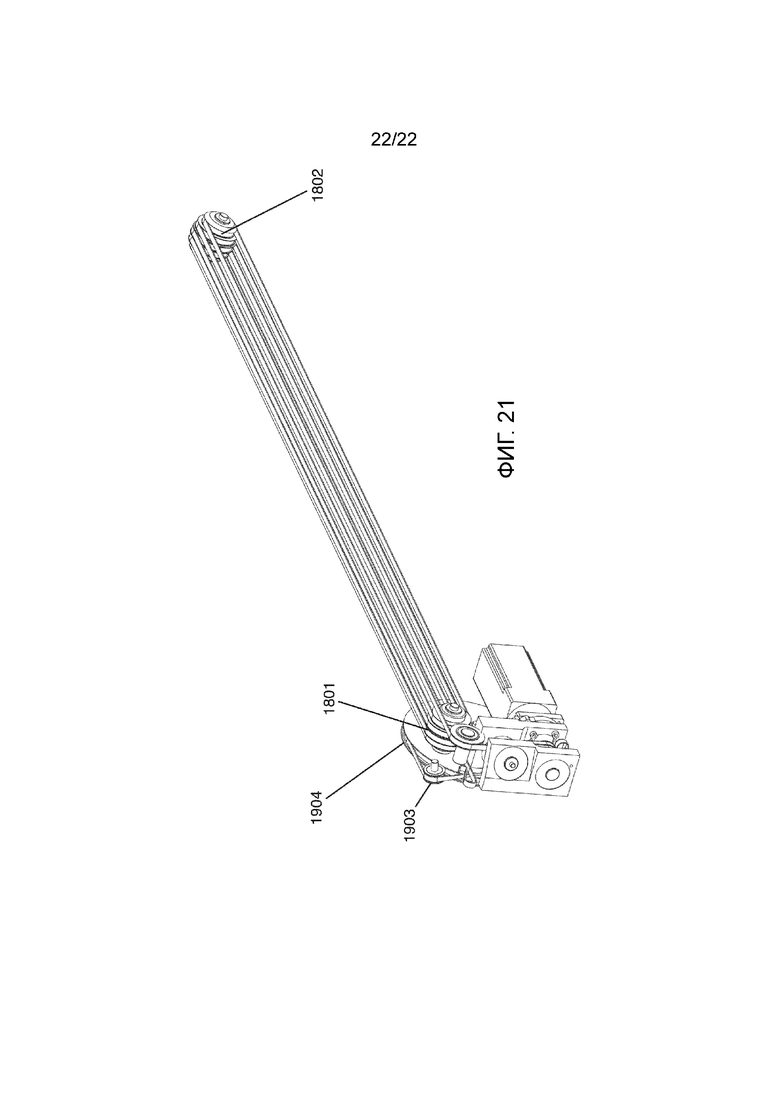
Фиг.21 показывает полный изометрический вид реализации данного изобретения только для натяжения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже приведены более подробные описания различных концепций, относящихся к и примерам осуществления, устройству тали для использования с плоским ремнем.
Фиг.1 иллюстрирует плоский ремень, используемый в традиционной топологии полиспаста, описанной в патенте США № 8,714,524 В2. Два параллельных вала 76 и 106 содержат множество шкивов, по которым проходит плоский ремень 120. Один конец ремня закреплен на конце 122, тогда как другой конец плоского ремня приводится в движение бобиной 121. Все шкивы свободно вращаются вокруг своих соответствующих валов, за исключением барабана, который приводится в действие двигателем 114. Механическое понижение, наблюдаемое на бобине такой системы, является значительным и эквивалентно количеству свободных промежутков в системе, которое в данном случае составляет 10. Способы полиспаста обычно используются с тросом, а не с плоскими ремнями, из-за углов наклона («перегибов») в ремне, которые могут возникнуть на каждой из границы раздела шкива, вызванных тем, что свободные промежутки 128 являются не горизонтальными. Эта неидеальная геометрическая ситуация приводит либо к асимметричному распределению натяжения внутри армирующих прядей, и/или к скольжению между ремнем и шкивом. Преждевременный выход из строя ремня произойдет из-за истирания боковой стенки и усталости прядей. Система наматывания, которая обрабатывает участки ремня, которые подвергаются наибольшему количеству циклов изгиба, является наиболее вероятной областью для отказа ремня. В этой конструкции присутствуют не только углы наклона, но и они различаются, так как расстояние между основными приводными валами 76 и 106 варьируется в зависимости от диапазона перемещения машины. Хотя эта система может работать в ограниченных условиях, рабочие характеристики ремня, измеряемые общим натяжением, давлением шкива и сроком службы, будут скомпрометированы по сравнению с тросом, который подвергается той же топологии.
Фиг.2 показывает общую форму настоящего изобретения. Привод 201 состоит из внешнего шасси 202, которое может быть выполнено в форме вмещающего корпуса, и приводного вала 203, который вытягивается и втягивается относительно внешнего шасси, которое может быть втянуто по меньшей мере частично во внешнее шасси 202. Элементы 204 и 205 крепления расположены, соответственно, на внешнем шасси и на приводном валу 203, что позволяет подавать питание в эти точки. Привод приводится в действие двигателем 206 (например, электрическим двигателем).
Фиг.3 изображает основные рабочие элементы привода 201. Унитарный плоский ремень 301 проходит вокруг четырех основных множеств шкивов 308, 309, 310 и 311, которые соединены с возможностью вращения с четырьмя основными приводными валами 302, 303, 304 и 305. Внешние приводные валы 304 и 305 закреплены относительно шасси 202, в то время как внутренние приводные валы 302 и 303 могут свободно перемещаться вдоль главной оси 307 посредством призматического соединения, создаваемого шасси 202 и ведущим валом 203.
Фиг.4 иллюстрирует структуру, используемую при передаче осевой нагрузки от элементов 205 крепления на внутренние приводные валы 302 и 303. Выходной вал 203 может быть изготовлен в виде полого вала. Выходной вал 203 соединяет элементы 205 крепления с внутренними приводными валами 302 и 303 посредством жестких вставок 402, образующих неподвижный узел компонентов, которые составляют силовую раму.
Фиг.5 представляет структуру, связанную с неподвижной рамой. Полукруглые элементы 501, 502 являются компонентами внешнего шасси 202, которые соединяют внешний приводной вал 304 с остальной частью основания шасси. Таким образом, может быть создано натяжение в обоих направлениях между неподвижными валами 304 и 305 и валами 302 и 303 силовой рамы, которые перемещаются относительно неподвижных валов 304 и 305 и относительно внешнего шасси 202 и внутри него.
Фиг.6 иллюстрирует топологию ремня в полном объеме. Единое плоское тело 301 ремня начинается с геометрии 601 заклинивания конца, которая близко закреплена относительно внешнего шасси 202. Ремень 301 наматывается на множество шкивов 308, соединенных с возможностью вращения с валом 302, и наматывается на множество шкивов 311, соединенных с возможностью вращения с валом 305, вызывая изогнутые геометрии 602a-e и 604 a-d ремня. Свободные промежутки 603 a-j соединяются с дугообразными участками ремня для того, чтобы полностью составить устройство полиспаста. Затем ремень наматывается на шкив перенаправления для образования дуги 605, которая ведет к узлу привода. Узел привода представляет собой фрикционный приводной компонент, состоящий из фрикционного барабана и противоположного ему направляющего шкива. Несколько участков 606a-c ремня находятся на тяговом барабане 1501, в то время как дополнительные участки 607a, b дуги находятся на направляющем шкиве 1503, который свободно вращается. Выходя из узла привода, дуга 608 ремня обеспечивает перенаправление вдоль промежутка 614 на противоположный полиспаст, где он наматывается вокруг двух множеств шкивов 309 и 310, которые свободно вращаются вокруг валов 303 и 304, соответственно. Они образуют дуговые участки 609 a-f и 611 a-e, соединенные свободными промежутками 610 a-j. Выходя из второго полиспаста, ремень проходит вдоль свободного промежутка 612, который ведет к концевой точке 613 заклинивания.
В условиях работы, один полиспаст растягивается, в то время как другой сокращается. Разница напряжения между двумя наборами является эквивалентной внешней нагрузке, налагаемой на систему, а разница напряжения ремня от стороны высокого напряжения к стороне низкого напряжения обеспечивается фрикционным приводом, который будет описан позже. Следует отметить, что в этом примере варианта осуществления изобретения два полиспаста противостоят друг другу для обеспечения возможности двунаправленной нагрузки. Другие варианты осуществления изобретения, которые требуют возможности одностороннего действия, могут требовать только одного полиспаста (см. Фиг.18) с избыточным ремнем, который высвобождается из фрикционной передачи, ведомой в приемную бобину низкого напряжения.
Фигуры 7A-7C представляют собой пример иллюстрации геометрического метода, используемого для предотвращения углов наклона в устройстве полиспаста. На этой фигуре мы смотрим вниз по главной оси движения трех различных видов полиспастов, причем в каждом случае показана центральная линия ремня или троса. Фиг.7А представляет традиционное устройство полиспаста. Фиг.7В представляет модифицированную конструкция полиспаста, которая устраняет углы наклона посредством простого способа наклона. Фиг.7С представляет описанный в данном документе способ геометрического отображения, который учитывает общие оси обоих наборов шкивов, а также устраняет углы наклона. Фиг.7D-Фиг.7Е представляют конструкцию машины, основанную на способе, изображенном на Фиг.7В.
Обычный полиспаст, аналогичный тому, который показан на фиг.1, будет иметь проекцию, аналогичную крайней левой иллюстрации, состоящей из двух наборов шкивов одинакового диаметра, которые расположены на осях 705, которые являются параллельными, и от упомянутого угла проекции будет казаться совпадающей. Первый набор шкивов будет представлять дугообразные участки гибкого растягивающего элемента, которые, если смотреть от проекции упомянутой оси, будут отображаться в виде вертикальных линий 701a, b, c. Следует обратить внимание, что для простоты здесь показаны только шесть свободных промежутков. Второй набор шкивов будет отображать дугообразные участки центральной линии гибкого растягивающего элемента, которые, если смотреть от упомянутого угла проекции, будут отображаться в виде вертикальных линий 702 a, b, c. Свободные промежутки 703 a, b, c проходят от первого набора шкивов ко второму набору шкивов, а свободные промежутки 704 a, b проходят от второго набора шкивов обратно к первому. Эти свободные промежутки, аналогичные свободным промежуткам 128 на фиг.1, являются не параллельными главной оси и, таким образом, имеют поперечную составляющую, которую можно увидеть с этой перспективы. Наличие этой поперечной составляющей свидетельствует об угле наклона, который является очевидным в любой точке входа в шкив.
Чтобы адаптировать полиспаст для использования с плоским ремнем, мы должны избавиться от углов наклона. Это легко достигается простым наклоном каждого из шкивов и их соответствующих дуг 707a-c ремня согласно фиг.7B и фиг.7D и фиг.7E, так что горизонтальный аспект свободного промежутка сокращается до нуля. У этого вида, все шкивы наклонены на один и тот же угол, так что углы наклона исчезают.
Противоположный набор шкивов будет создавать проекции 708 а-в линии центров. Это выполняет условие нулевого угла наклона, но делает оси 706 а-с шкивов поворота больше не совпадающими. Таким образом, опорный вал должен иметь несколько не совпадающих участков вала, которые поддерживают шкивы.
Фиг.7D и Фиг.7E изображают конструкцию машины, которая основана на этом принципе исключения угла наклона. Как можно видеть, опорные валы (с осевыми линиями 706a-c) не совпадают друг с другом на обоих концах полиспаста. Эта машина, разработанная Роланом Верри и Жаном-Марком Тейсье, испытывает усталость при изгибе в образцах из проволочного троса. Благодаря умелому контролю величины хода некоторые участки троса подвергаются воздействию множества долей максимального количества циклов изгиба. Таким образом, запуская машину только один раз, оператор может определить состояние износа троса при 20%, 40%, 60%, 80% и 100% от максимального количества циклов испытаний на изгиб. В случае этой машины, допустима дополнительная ширина машины, полученная методом исключения углов наклона, и шкивы по необходимости имеют одинаковый размер для целей сопоставимой информации тестирования.
Настоящее изобретение не требует, чтобы шкивы были точно одинакового размера, и чрезвычайно важно поддерживать общую компактность машины и непрерывность опорных валов.
Это выполнено на иллюстрации фиг.7С. Геометрия может быть найдена посредством метода отображения, начиная с осей 709 и 710 шкива, которые располагаются на противоположных концах полиспаста. Начальный размер 711a шкива и его положения осевого промежутка сначала вычерчиваются на его оси 710, с каждой последующей дугой осевой линии (712a, затем 711b, 712b, 711c, 712c и т.д.) определяемой его предшественником и его перпендикулярностью и сбалансированностью на своем собственном валу. Существует только одно геометрическое решение для набора шкивов с учетом набора осей 709, 710 шкивов, исходной геометрии 711а дуги осевой линии и количества шкивов для генерации. Результирующие плоские местоположения осевых линий свободного промежутка, как видно из этой перспективы, находятся вдоль окружного профиля 713 с упомянутыми дополнительными ограничениями. Расстояние между параллельными шкивами является обязательно непостоянным и уменьшается по мере уменьшения диаметра шкивов по направлению к периферии.
Фиг.8 показывает осевой вид топологии ремня с выделением оси 801 вращения внешнего вала 305 и его соответствующего набора свободно вращающихся шкивов 311. Участки 604a-d ремня находятся на множестве шкивов 311 в соответствии с положениями, показанными на фиг.7. Множество шкивов 308 свободно вращаются вокруг вала 302 с его осью 802. Участки 602a-e ремня находятся на множестве шкивов 308 в соответствии с положениями, изображенными на фиг.7.
Фиг.9 показывает изометрический вид топологии полиспаста. Дуговые геометрии 609 a-f и 611 a-e соединены свободными промежутками 610 a-j.
Фиг.10 показывает сечение топологии полиспаста, включая свободные промежутки 612 и 614, которые приводят к заклиниванию 613 окончания и изгибу 608 перенаправления, соответственно. Окружной профиль 713 изображен, пересекая центральную точку каждого участка ремня в сечении.
Фиг.11 и фиг.12 представляют вид сбоку топологии полиспаста для ясности.
Фиг.13 иллюстрирует сечение множества шкивов 308, которые состоят из пяти отдельных шкивов 1301a-e, каждый из которых вращается с различными скоростями и свободно вращается вокруг вала 303. Шкивы имеют разделительные упорные шайбы 1302 a-f, которые допускают сжимающую осевую нагрузку стопки шкивов. Уплотнения 1303 a-d поддерживают объем смазанного подшипника и исключают возможные загрязнения. Участки 611a-e ремня расположены на множестве шкивов 308. Вставки 402а и 402b выходного штока обеспечивают механическое соединение между валами 302, 303 силовой рамы и выходным штоком 203.
Фиг.14 изображает вид сбоку топологии ремня вблизи приводного двигателя для ясности.
Фиг.15 показывает опорную структуру множества компонентов в сечении. Двигатель 206 и его редуктор 1502 прикреплены к тяговому барабану 1501, который приводит в движение участки 606a-c ремня. Участки 607 а, b ремня постоянно находятся на натяжном барабане 1503, который свободно вращается вокруг своей опорной оси 1505. Базовая рама 1504 закрепляет эти компоненты на месте.
Фиг.16 иллюстрирует вид сечения натяжного механизма для концов ремня. Геометрия 613 заклинивания ремня сжата между клином 1601 и опорными стенками 1602а, b. Опорные стенки 1602a, b являются частью оконечного корпуса 1603, который сжимает пружину 1605 сжатия против корпуса 1604 концевой заделки. Направляющий шкив используется для изменения направления ремня от корпуса концевой заделки. Корпус 1604 концевой заделки прикреплен к базовой раме 1504. При нормальной работе, оконечный корпус 1603 сжимается относительно базовой рамы 1504, когда в ремне развивается высокое натяжение. Если во время работы развивается низкое натяжение ремня, пружина 1605 сжатия выталкивает оконечный корпус 1603 наружу, постоянно поддерживая натяжение ремня и обеспечивая, таким образом, работу тягового барабана 1501.
Фиг.17 иллюстрирует полный вид сбоку многих базовых компонентов для ясности.
Фиг.18 показывает альтернативную разновидность изобретения, которое основывается только на одном наборе полиспаста. Ремень после выхода из первого полиспаста и приводного устройства, наматывается на барабан. Множество шкивов 1801 аналогичны набору 311 шкивов, а множество шкивов 1802 аналогичны набору 310 шкивов. Приводной шкив 1803 аналогичен приводному шкиву 1501 из предыдущего вида, а натяжной шкив 1804 аналогичен натяжному шкиву 1503.
Фиг.19 представляет детализированный вид элементов привода. Топология ремня остается идентичной первому полиспасту, шкиву перенаправления и приводному узлу. Участки 1901a-c дуги ремня аналогичны участкам 606a-c дуги ремня, а участки 1902a, b дуги ремня аналогичны 607a, b. Когда ремень выходит из области привода, он перенаправляется шкивом 1903 на приемную бобину, а не перенаправляется на противоположный полиспаст. Бобина 1904 может приводиться в действие пружиной или активным механическим средством.
Фиг.20 представляет детализированный вид топологии ремня второй разновидности по изобретению. Участок 2001 дуги ремня расположен на шкиве перенаправления 1903 со свободным промежутком 2002, ведущим к намотанному ремню 2003.
Фиг.21 показывает изометрический вид второй разновидности.
Свободные промежутки 2100a-j поддерживают растягивающую нагрузку через привод, аналогично любому другому полиспасту на основе подъемных устройств. Ремень приводится в движение через ведущий вал приводного узла на основе трения, состоящего из приводного шкива 1803 и натяжного шкива 1804. После выхода из узла привода, ремень 1903 перенаправляется на барабан 1904 для хранения при низком натяжении. Большая часть потока мощности через систему проходит через ведущий вал приводного шкива 1803 и во вращательный привод.
Используемые здесь термины «приблизительно», «примерно», «по существу» и аналогичные термины предназначены для того, чтобы иметь широкое значение в гармонии с общим и общепринятым использованием специалистами в данной области техники, к которой относится данный предмет изобретения.
Специалистам в данной области техники, которые рассматривают это изобретение, следует понимать, что эти термины предназначены для того, чтобы обеспечить описание определенных описанных признаков, не ограничивая объем этих признаков предоставленными точными числовыми диапазонами.
Соответственно, эти термины следует интерпретировать как указывающие на то, что несущественные или незначительные модификации или изменения описанного предмета и считаются находящимися в рамках объема изобретения.
Следует отметить, что термин «пример осуществления», используемый в данном документе для описания различных вариантов осуществления, предназначен для указания того, что такие варианты осуществления являются возможными примерами, представлениями и/или иллюстрациями возможных вариантов осуществления (и такой термин не предназначен для обозначения того, что такие варианты осуществления являются обязательно неординарными или превосходными примерами).
Для цели настоящего изобретения, термин «связанный» означает соединение двух элементов прямо или косвенно друг с другом. Такое соединение может быть неподвижным или подвижным по природе. Такое соединение может быть достигнуто двумя элементами или двух элементов, и любые дополнительные промежуточные элементы, в целом, образованы как единое цельное тело друг с другом или с двумя элементами или двумя элементами и любыми дополнительными промежуточными элементами, прикрепленными друг к другу. Такое соединение может быть постоянным по природе или может быть съемным или высвобождаемым по природе.
Следует отметить, что ориентация различных элементов может отличаться в соответствии с другими примерами осуществления, и что такие варианты предназначены для охвата настоящим изобретением.
Следует понимать, что признаки раскрытых вариантов осуществления могут быть включены в другие раскрытые варианты осуществления.
Следует отметить, что конструкции и устройства пружинных систем или их компонентов, как показано в различных примерах осуществления, являются только иллюстративными.
Хотя только несколько вариантов осуществления были подробно описаны в этом раскрытии, специалисты в данной области техники, которые рассматривают это изобретение, легко поймут, что возможны многие модификации (например, изменения в габаритах, размерах, структурах, формах и пропорциях различных элементов, значениях параметров, схемах расположения, использования материалов, цветов, ориентации и т.д.) без существенного отклонения от новых учений и преимуществ раскрытого предмета.
Например, элементы, показанные как образованные как одно целое, могут быть составлены из нескольких частей или элементов, положение элементов может быть обращено или изменено иным образом, и природа или количество дискретных элементов или положений могут быть изменены или отличаться.
Порядок или последовательность любых этапов процесса или способа могут изменяться или повторно чередоваться согласно альтернативным вариантам осуществления. Другие замены, модификации, изменения и пропуски также могут быть сделаны в конструкции, рабочих условиях и компоновке различных примеров осуществления без отклонения от объема настоящего изобретения.
Вся литература и аналогичные материалы, цитируемые в этой заявке, включая, но не ограничиваясь этим, патенты, патентные заявки, статьи, книги, трактаты и веб-страницы, независимо от формата такой литературы и аналогичных материалов, прямо включены путем ссылки в их полноте.
В случае если одна или несколько из включенной литературы и аналогичных материалов отличаются от или противоречат этой заявке, включая, но, не ограничиваясь определенными терминами, условием использования, описаниями способов или тому подобным, эта заявка контролируется.
Хотя в материалах настоящей заявки было раскрыто и проиллюстрировано множество обладающих признаками изобретения различных вариантов осуществления, специалистам в данной области техники будет абсолютно очевидно широкое разнообразие других средств и/или конструкций для выполнения функций и/или для получения результатов и/или одного или более преимуществ, описанных в материалах настоящей заявки, при этом каждое из таких изменений и/или модификаций полагается как находящееся в пределах объема обладающих признаками изобретения вариантов осуществления, описанных в материалах настоящей заявки.
В более общем смысле специалисты в данной области техники без труда осознают, что все параметры, размеры, материалы и конфигурации, описанные в материалах настоящей заявки, подразумеваются в качестве примерных, и что фактические параметры, размеры, материалы и/или конфигурации будут зависеть от специфичного применения, для которого эти обладающие признаками изобретения идеи используются.
Специалисты в данной области техники осознают или будут в состоянии определить, используя накопленный опыт, множество эквивалентов для отдельных обладающих признаками изобретения вариантов осуществления, описанных в материалах настоящей заявки.
Следовательно, следует понимать, что упомянутые выше варианты осуществления представлены лишь в качестве примера, и что на практике могут быть применены отличные от описанных и заявленных варианты осуществления, обладающие признаками изобретения, находящиеся в пределах объема прилагаемой формулы изобретения и ее эквивалентов.
Обладающие признаками изобретения варианты осуществления настоящего изобретения направлены к каждому индивидуальному признаку, системе, изделию, материалу, комплекту и/или способу, описанному в материалах настоящей заявки.
Также любое сочетание двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если такие признаки, системы, изделия, материалы, комплекты и/или способы не являются взаимно исключающими, включено в пределы обладающего признаками изобретения объема настоящего изобретения.
Кроме того, способ, описанный в данном документе, может быть воплощен как способ, из которого был предоставлен по меньшей мере один пример.
Действия, выполняемые как часть способа, могут быть упорядочены любым подходящим образом.
Соответственно, могут быть созданы варианты осуществления, в которых действия выполняются в порядке, отличном от проиллюстрированного, что может включать в себя выполнение некоторых действий одновременно, даже если они показаны как последовательные действия в иллюстративных вариантах осуществления.
Все определения, которые даны и использованы в материалах настоящей заявки, должны быть приняты как более преимущественные, чем определения словарей, определения документов, включенных посредством ссылки, и/или обычные значения данных терминов.
Единственное число существительных, использованных в описании настоящей заявки и в формуле изобретения, если четко не указано иным образом, должно пониматься как «по меньшей мере, один».
Фраза «и/или» как указано в описании настоящей заявки, должна подразумеваться как «любой из двух или оба вместе» для соединяемых таким образом элементов, т.е. эти элементы в некоторых случаях присутствуют в этом объединении, а в других случаях - отсутствуют.
Множество элементов, перечисленных с помощью «и/или» должно истолковываться подобным образом, т.е. «один или более» из элементов, соединяемых подобным образом.
Если необходимо могут быть использованы другие элементы, отличные от элементов в частности перечисленных союзом «и/или», относящиеся или не относящиеся к перечисленным в частности элементам.
Таким образом, в качестве неограничивающего примера, ссылка на «A и/или B», когда используется в связи со свободным языком, таким как «содержащий», может ссылаться, в одном варианте осуществления, только на A (необязательно, включая элементы, отличные от В); в другом варианте осуществления только к B (необязательно включая элементы, отличные от A); в еще одном варианте осуществления к A и B (необязательно включая другие элементы); и т.п.
Используемый здесь в описании и формуле изобретения термин «или» следует понимать как имеющий то же значение, что и «и/или», как определено выше.
Например, при разделении элементов в списке «или» или «и/или» должны интерпретироваться как включающие, то есть включающие по меньшей мере один, но также включающие более одного, из числа или списка элементов, и, возможно, дополнительные незарегистрированные позиции.
Только термины, четко обозначенные как противоположные, такие как «только один из» или «точно один из», или, когда используется в формуле изобретения «состоящий из», будут относиться к включению ровно одного элемента из числа или списка элементов.
Как правило, термин «или», используемый в данном документе, должен толковаться только как указывающий на исключительные альтернативы (т.е. «один или другой, но не оба»), когда ему предшествуют термины исключительности, такие как «либо», «один из», «только одно из» или «точно одно из», «состоящее, по существу, из» при использовании в формуле изобретения, имеет свое обычное значение, используемое в области патентного права.
При использовании в описании настоящей заявки и в формуле изобретения фраза «по меньшей мере, один» со ссылкой к списку из одного или более элементов должна означать по меньшей мере один элемент из одного или более элементов в списке элементов, причем не обязательно включать по меньшей мере каждый элемент, перечисленный в пределах списка элементов, причем не исключаются любые сочетания элементов в списке элементов.
Это определение также допускает присутствие, если необходимо, других элементов, отличных от элементов, в частности идентифицированных в пределах списка элементов, к которым ссылается фраза «по меньшей мере, один», при этом они могут быть связанными или несвязанными с идентифицированными в частности элементами.
Таким образом, в качестве не ограничивающего примера выражение «по меньшей мере, один из А и В» (или, эквивалентно, «по меньшей мере, один из А или В», или эквивалентно, «по меньшей мере, один из А и/или В») может ссылаться в одном варианте, по меньшей мере к одному А, если необходимо, включающему больше одного, при отсутствии B (и, если необходимо, включающему элементы отличные от B); в другом варианте по меньшей мере к одному В, если необходимо, включающему больше одного, при отсутствии А (и, если необходимо, включающему элементы отличные от А); еще в одном варианте по меньшей мере к одному А, если необходимо, включающему больше одного, и, по меньшей мере к одному В, если необходимо, включающему больше одного (и, если необходимо, включающему другие элементы); и т.д.
В формуле изобретения, а также в приведенном выше описании все переходные фразы, такие как «содержащий», «включающий», «несущий», «имеющий», «содержащий в себе», «включающий в себя», «несущий», «составленный из», и тому подобное следует понимать как открытый, то есть означать включающий, но не ограничивающийся им.
Только переходные фразы «состоящий из» и «состоящий, по существу, из» должны быть закрытыми или полузакрытыми переходными фразами, соответственно, как указано в Руководстве по процедурам патентной экспертизы Патентного ведомства США, раздел 2111.03.
Формула изобретения не должна рассматриваться как ограниченная описанным порядком или элементами, если не указано иное.
Следует понимать, что специалистом в данной области техники могут быть сделаны различные изменения в форме и деталях, не выходя за рамки сущности и объема прилагаемой формулы изобретения.
Заявлены все варианты осуществления, которые соответствуют сущности и объему следующей формулы изобретения и ее эквивалентам.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОРМАЛИЗАЦИЯ РАСПРЕДЕЛЕНИЯ НАТЯЖЕНИЯ И МИНИМИЗАЦИЯ ИСТИРАНИЯ БОКОВЫХ СТЕНОК В УГЛОВЫХ РЕМЕННЫХ СИСТЕМАХ ПРИВОДА | 2018 |
|
RU2774199C2 |
| ВЕДУЩИЙ ШКИВ ДЛЯ БЕССТУПЕНЧАТО-РЕГУЛИРУЕМОЙ ПЕРЕДАЧИ | 2002 |
|
RU2251639C1 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2593113C2 |
| ДРОБИЛКА С НЕСКОЛЬКИМИ ПРИВОДАМИ | 2014 |
|
RU2708320C2 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ РЕМНЯ ДРОБИЛКИ | 2014 |
|
RU2663741C2 |
| НЕПРЕРЫВНО ИЗМЕНЯЕМАЯ ТРАНСМИССИЯ, СИСТЕМА СЦЕПЛЕНИЯ, ТРАНСПОРТНОЕ СРЕДСТВО. | 2012 |
|
RU2588406C2 |
| ЛИФТ | 2024 |
|
RU2838935C1 |
| УСТРОЙСТВО ТОЧНОЙ ПОДАЧИ СЫПУЧИХ МАТЕРИАЛОВ | 2018 |
|
RU2743469C1 |
| СИСТЕМА РЕМЕННОЙ ПЕРЕДАЧИ | 2010 |
|
RU2505448C2 |
| МНОГОСТУПЕНЧАТАЯ МОЛОТКОВАЯ ДРОБИЛКА И СОДЕРЖАЩАЯ ЕЕ КОМБИНИРОВАННАЯ УБОРОЧНАЯ МАШИНА | 2017 |
|
RU2752521C2 |

Группа изобретений относится к системам линейного привода. Система линейного привода содержит шасси привода с главной осью привода, валы, первое и второе множества шкивов. Система линейного привода может включать в себя по меньшей мере один приводной вал, подвижно соединенный с шасси привода. По меньшей мере один из первого вала и второго вала выполнен с возможностью перемещения вдоль главной оси привода. Первый вал и второй вал расположены перпендикулярно к главной оси привода и смещены относительно друг друга на статичный угол поворота вокруг главной оси привода. Точки на соответствующих концах отрезков прямой, продолжающихся вдоль геометрической осевой линии множества свободных промежутков от первого множества шкивов и второго множества шкивов, лежат почти вдоль общего окружного профиля, ортогонального к главной оси привода. Достигается повышение срока службы плоского ремня. 4 н. и 18 з.п. ф-лы, 25 ил. 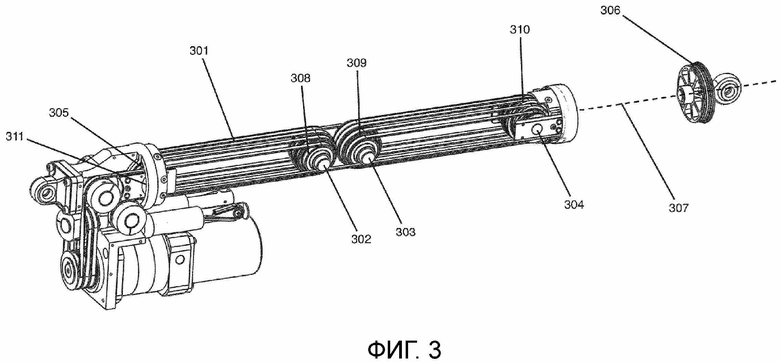
1. Система линейного привода, содержащая:
шасси привода с главной осью привода;
первое множество шкивов, соединенных соответственно с первым валом, соединенным с шасси привода, причем первое множество шкивов содержит шкивы, имеющие ось вращения, которая совпадает с первым валом, при этом пара фланцев шкива в первом множестве шкивов разнесена друг от друга посредством непостоянного интервала, причем шкивы в первом множестве шкивов имеют разные диаметры осевой линии шкива относительно друг друга; и
второе множество шкивов, соединенных соответственно со вторым валом, соединенным с шасси привода, причем второе множество шкивов содержит шкивы, имеющие ось вращения, которая совпадает со вторым валом, при этом пара фланцев во втором множестве шкивов разнесена друг от друга посредством непостоянного интервала, причем шкивы во втором множестве шкивов имеют разные диаметры осевой линии шкива относительно друг друга,
при этом по меньшей мере один из первого вала и второго вала выполнен с возможностью перемещения вдоль главной оси привода, при этом первый вал и второй вал расположены перпендикулярно к главной оси привода и смещены относительно друг друга на статичный угол поворота вокруг главной оси привода, причем точки на соответствующих концах отрезков прямой, продолжающихся вдоль геометрической осевой линии множества свободных промежутков от первого множества шкивов и второго множества шкивов, лежат почти вдоль общего окружного профиля, ортогонального к главной оси привода.
2. Система линейного привода по п.1, дополнительно содержащая плоский ремень, продолжающийся от первой оконечной точки к и вокруг первого множества шкивов, к и вокруг второго множества шкивов и до второй оконечной точки в приемной бобине.
3. Система линейного привода по п.2, дополнительно содержащая привод, выполненный с возможностью зацепления с плоским ремнем.
4. Система линейного привода по п.3, в которой привод содержит электрический двигатель.
5. Система линейного привода по п.1, дополнительно содержащая по меньшей мере один приводной вал, подвижно соединенный с шасси привода для перемещения вдоль главной оси привода.
6. Система линейного привода с ременной передачей, содержащая:
шасси привода;
приводной вал, подвижно соединенный с шасси привода для перемещения вдоль оси;
первое множество внешних шкивов и второе множество внешних шкивов, соединенных соответственно с первым внешним валом и вторым внешним валом, причем первое множество внешних шкивов и второе множество внешних шкивов выполнены с возможностью свободного вращения вокруг первого внешнего вала и второго внешнего вала, соответственно, при этом оба закреплены относительно шасси привода;
первое множество внутренних шкивов и второе множество внутренних шкивов, соединенных соответственно с первым внутренним валом и вторым внутренним валом, причем первое множество внутренних шкивов и второе множество внутренних шкивов выполнены с возможностью свободного вращения вокруг первого внутреннего вала и второго внутреннего вала, соответственно, при этом первый внутренний вал и второй внутренний вал выполнены с возможностью перемещения вдоль оси в шасси привода для приведения в действие приводного вала; и
плоский ремень, продолжающийся от первой оконечной точки до и вокруг: первого множества внутренних шкивов, первого множества внешних шкивов, второго множества внутренних шкивов, второго множества внешних шкивов и до второй оконечной точки,
при этом первый внешний вал и первый внутренний вал наклонены относительно друг друга на статичный угол поворота вокруг главной оси, и причем второй внешний вал и второй внутренний вал наклонены относительно друг друга на статичный угол поворота вокруг главной оси с тем, чтобы устранить углы наклона.
7. Система линейного привода с ременной передачей по п.6, содержащая тяговый шкив, соединенный с шасси привода и выполненный с возможностью соединения с вращательным приводом.
8. Система линейного привода с ременной передачей по п.6, в которой плоский ремень продолжается от первой оконечной точки, затем к и вокруг первого множества внешних шкивов, затем к и вокруг тягового шкива, затем к и вокруг второго множества внутренних шкивов, затем к и вокруг второго множества внешних шкивов и затем ко второй оконечной точке.
9. Система линейного привода с ременной передачей по п.6, дополнительно содержащая вращательный привод.
10. Система линейного привода с ременной передачей по п.9, в которой вращательный привод выполнен с возможностью вращения вперед и назад.
11. Система линейного привода с ременной передачей по п.6, в которой шасси привода содержит крышку корпуса, расположенную вокруг шасси привода, и при этом по меньшей мере участок приводного вала перемещается в и из крышки корпуса.
12. Система линейного привода с ременной передачей по п.6, в которой первый внутренний вал и второй внутренний вал выполнены с возможностью перемещения вдоль оси в одном и том же направлении, посредством чего расстояние между первым множеством внешних шкивов и первым множеством внутренних шкивов выполнено с возможностью увеличения одновременно с уменьшением расстояния между вторым множеством внешних шкивов и вторым множеством внутренних шкивов и посредством чего расстояние между первым множеством внешних шкивов и первым множеством внутренних шкивов выполнено с возможностью уменьшения одновременно с увеличением расстояния между вторым множеством внешних шкивов и вторым множеством внутренних шкивов.
13. Система линейного привода с ременной передачей по п.6, в которой первый внутренний вал и второй внутренний вал выполнены с возможностью колебания вдоль главной оси.
14. Система линейного привода с ременной передачей по п.6, дополнительно содержащая вращательный привод, соединенный со шкивом перенаправления.
15. Система линейного привода с ременной передачей по п.6, в которой каждый из первого множества внешних шкивов, второго множества внешних шкивов, первого множества внутренних шкивов и второго множества внутренних шкивов содержит шкивы, имеющие разные диаметры.
16. Система линейного привода с ременной передачей по п.15, в которой шкивы, имеющие разные диаметры, являются параллельными друг другу.
17. Система линейного привода с ременной передачей по п.16, в которой относительное расстояние между параллельными парами фланцев шкивов не является постоянным.
18. Система линейного привода с ременной передачей по п.17, в которой расстояние между параллельными парами фланцев шкивов уменьшается по мере уменьшения диаметра шкивов.
19. Система линейного привода с ременной передачей по п.17, дополнительно содержащая упорные шайбы, расположенные между шкивами, для обеспечения расстояния между параллельными шкивами.
20. Система линейного привода с ременной передачей по п.15, в которой шкивы уменьшаются в диаметре в осевом направлении наружу.
21. Система линейного привода с ременной передачей, содержащая:
шасси привода;
приводной вал, подвижно соединенный с шасси привода для перемещения вдоль главной оси;
первое множество шкивов, имеющих разные диаметры, соединенных с первым внешним валом и выполненных с возможностью свободного вращения вокруг первого внешнего вала, причем первый вал соединен с возможностью вращения с шасси привода и закреплен сбоку относительно шасси привода;
второе множество шкивов, имеющих разные диаметры, соединенных со вторым валом и выполненных с возможностью свободного вращения вокруг второго вала, причем второй вал выполнен с возможностью перемещения вдоль оси в шасси привода для приведения в действие приводного вала;
при этом первый вал и второй вал наклонены относительно друг друга на статичный угол поворота вокруг главной оси с тем, чтобы исключить углы наклона;
плоский ремень, продолжающийся от первой оконечной точки к и вокруг первого множества шкивов, затем к и вокруг второго множества шкивов, продолжающийся до тягового шкива, приводимого во вращение приводом, и, наконец, до приемной бобины.
22. Способ приведения в действие системы линейного привода с ременной передачей, включающий:
подачу питания вращательному приводу, соединенному с тяговым шкивом для вращения тягового шкива, соединенного с шасси привода, при этом шасси привода содержит:
приводной вал, подвижно соединенный с ним вдоль главной оси;
первое множество шкивов и второе множество шкивов, соединенных соответственно с первым валом и вторым валом, причем первое множество шкивов и второе множество шкивов выполнены с возможностью свободного вращения вокруг первого вала и второго вала, соответственно, при этом первый вал закреплен относительно шасси привода, а второй вал выполнен с возможностью перемещения вдоль главной оси;
плоский ремень, продолжающийся от первой оконечной точки к и вокруг первого множества шкивов, второго множества шкивов через тяговый привод и до второй оконечной точки;
при этом диаметры шкивов в первом множестве шкивов и втором множестве шкивов являются различными, а первый вал и второй вал наклонены с тем, чтобы исключить углы наклона в большинстве свободных промежутков;
при этом подача питания на вращательный привод приводит в действие тяговый шкив, что приводит к уменьшению расстояния между первым множеством шкивов и вторым множеством шкивов под нагрузкой.
| US 3044312 A1, 17.07.1962 | |||
| ПРЕОБРАЗОВАТЕЛЬ НАПРАВЛЕНИЯ ДВИЖЕНИЯ ФРИКЦИОННЫЙ | 2007 |
|
RU2336450C1 |
| ЛИНЕЙНЫЙ ПРИВОД | 2012 |
|
RU2604762C2 |
| WO 2006008515 A2, 26.01.2006. | |||

