Область техники, к которой относится изобретение
Изобретение относится к системам всасывания частиц торможения в фрикционных тормозных системах. Такими фрикционными тормозными системами могут быть оснащены автодорожные или рельсовые транспортные средства, а также стационарные машины, такие как ветроустановки или промышленные машины.
Уровень техники
В таких системах, например, в системе, описанной в документе DE4240873, предусмотрены всасывающая турбина и фильтр сбора частиц. Частицы, выделяемые в результате трения, скапливаются в сборном фильтре.
Обычно применяемое решение состоит в том, чтобы активировать всасывающую турбину, только когда водитель или система транспортного средства реально активирует фрикционное торможение.
Однако авторы изобретения заметили, что время, необходимое для создания требуемого разрежения в канале и во всасывающем отверстии, является довольно длительным и что, следовательно, в самом начале фазы торможения разрежение может быть еще недостаточным для нормального улавливания частиц торможения.
Иначе говоря, если активировать турбину в момент, когда начинается фрикционное торможение, создание разрежения занимает слишком много времени, и степень улавливания не является оптимальной. Кроме того, постоянная работа турбины тоже является нежелательной с учетом электрического потребления двигателя турбины и шума, производимого во время работы турбины.
Задача изобретения состоит в разработке усовершенствованного решения для повышения эффективности улавливания с самого начала фазы фрикционного торможения.
Раскрытие сущности изобретения
Для этого изобретением предложена система всасывания частиц торможения фрикционной тормозной системы транспортного средства в гибридном или электрическом транспортном средстве, при этом система всасывания содержит:
по меньшей мере один источник разрежения (например, турбину или другое средство), по меньшей мере одно всасывающее отверстие, соединенное через пневматический контур с источником разрежения, блок управления, выполненный с возможностью управлять источником разрежения,
согласно изобретению, система всасывания содержит также поток данных, поступающих от вычислительного устройства управления двигателем-генератором тягово-тормозного устройства транспортного средства,
при этом блок управления выполнен с возможностью управлять источником разрежения с опережением по отношению к действительной активации фрикционного торможения, при этом блок управления управляет источником разрежения по меньшей мере в зависимости от активации электромагнитного торможения.
Благодаря этим признакам, в случае электрического или гибридного транспортного средства, в котором обычно фаза электромагнитного торможения с рекуперацией энергии предшествует фазе диссипативного фрикционного торможения, предпочтительно используют данную включения электромагнитного торможения, чтобы инициализировать фазу всасывания системы всасывания с опережением относительно фазы фрикционного торможения, которая обычно начинается позже, в зависимости от случая от нескольких сот миллисекунд до нескольких секунд после начала электромагнитного торможения.
В данном случае термином «гибридное транспортное средство» обозначают транспортное средство, содержащее тяговую цепь одновременно с тепловым двигателем и с электрическим двигателем. В настоящем документе термин «гибридное транспортное средство» охватывает все решения, которые можно считать гибридными, от «микрогибридного» до «полногибридного» в зависимости от уровня имеющейся электрической мощности от в зависимости от имеющегося уровня автономии.
В данном случае под «электрическим транспортным средством» следует понимать транспортное средство с нулевым выбросом от сгорания, то есть без теплового двигателя.
Под «всасывающим отверстием» в данном случае следует понимать зону первичного улавливания частиц, например, канавку, выполненную в фрикционном материале, или щель в непосредственной близости от по меньшей мере одного края фрикционного материала.
Частицы выделяются из фрикционного материала, который обычно является частью тормозной колодки или эквивалентного элемента.
Под «источником разрежения» в данном случае следует понимать либо турбину, специально предназначенную для функции всасывания частиц торможения, либо источник разрежения, уже существующий на транспортном средстве, который используют селективно для всасывания частиц в сборный фильтр.
Кроме того, система может содержать по меньшей мере один фильтр 2 для сбора всасываемых частиц.
Кроме того, пневматический контур может содержать по меньшей мере один первый канал 3, соединяющий всасывающее отверстие с фильтром 2. Первый канал находится на выходе всасывающего отверстия на пути частиц от всасывающего отверстия к фильтру.
Согласно предпочтительному признаку, фильтр 2 установлен между первым каналом 3 и источником 1 разрежения. Источник разрежения всасывает частицы через фильтр, который находится в этом случае под разрежением по отношению к окружающему внешнему давлению.
Согласно обратному альтернативному признаку, между первым каналом и фильтром установлен источник разрежения, и в этом случае всасывают частицы, а затем их нагнетают в фильтр (фильтр находится под повышенным давлением).
В различных вариантах осуществления изобретения, относящихся к системе, можно также предусматривать один и/или другой из следующих признаков, рассматриваемых отдельно или в комбинации.
Согласно предпочтительному варианту, источник разрежения образован турбиной, приводимой во вращение электрическим двигателем. Это представляет собой решение, не зависящее от любой другой пневматической системы транспортного средства, кроме того, это решение характеризуется большой гибкостью управления, в частности, турбиной можно управлять по принципу «все или ничего» или с любой скоростью вращения.
Согласно альтернативному варианту, источник разрежения образован источником разрежения, уже существующим на транспортном средстве, в частности, в случае области автопромышленности, источником разрежения, создаваемого при работе двигателя транспортного средства, например, с отводом от впуска воздуха, или в другом примере за счет использования эффекта Вентури на выходящем потоке газов, например, выхлопных газов. В случае применения в области рельсовых транспортных средств источник разрежения может быть производным от пневматического оборудования торможения или от другого вспомогательного оборудования рельсового транспортного средства.
Согласно варианту, система всасывания содержит также поток данных, поступающих от вычислительного устройства электродинамического торможения, и блок управления выполнен с возможностью управлять источником разрежения в зависимости от активации электродинамического торможения. При этом, в дополнение к учету электромагнитного торможения система может учитывать другую тормозную систему электродинамического типа, например, тормоз-замедлитель (система, которую часто применяют на большегрузных транспортных средствах).
Согласно варианту, система содержит централизованные фильтр и турбину, соединенные с четырьмя или более всасывающими отверстиями. Это позволяет оптимизировать стоимость полного решения. Даже при существенной длине магистрали и значительном внутреннем объеме в этой конфигурации предложенное опережение позволяет создавать разрежение в магистралях достаточно рано, чтобы оптимизировать улавливание частиц.
Согласно варианту, система содержит децентрализованные фильтр и турбину, то есть для каждого всасывающего отверстия или для пары всасывающих отверстий. Это позволяет получить распределенную систему, и поломка на одной части не влияет на нормальную работу других частей системы. Можно даже предусмотреть фильтр, турбину и всасывающее отверстие на каждую колодку и/или всасывающее отверстие на каждой стороне диска.
Согласно варианту, блок управления выполнен с возможностью управлять источником разрежения в зависимости от быстрого снятия ноги с педали акселератора. Благодаря этому, систему всасывания частиц торможения можно привести в действие еще до того, как водитель нажмет на педаль тормоза, чтобы включить устройство электромагнитного или электродинамического торможения, или систему всасывания частиц торможения можно привести в действие, чтобы упредить фазу экстренного торможения, при которой включение фрикционного торможения должно происходить как можно раньше.
Согласно варианту, предусмотрен по меньшей мере один второй канал, соединяющий фильтр с источником разрежения. Предпочтительно, даже при большой длине трубок между источником разрежения (турбиной или другим источником) и всасывающими отверстиями (с значительным объемом воздуха) применение опережения позволяет получать достаточное разрежение в момент, когда начинается фрикционное торможение.
Объектом настоящего изобретения является также способ управления системой всасывания частиц фрикционного торможения тормозной системы транспортного средства в гибридном или электрическом транспортном средстве, при этом система всасывания содержит:
по меньшей мере один источник разрежения (например, турбину или другое средство), по меньшей мере одно всасывающее отверстие 83, по меньшей мере один пневматический контур, соединяющий всасывающее отверстие с источником разрежения, и блок 6 управления, выполненный с возможностью осуществлять следующие этапы:
- получают одну или несколько данных от вычислительного устройства управления двигателем-генератором тягово-тормозного устройства транспортного средства,
- устанавливают условия опережающего управления источником разрежения,
- управляют источником разрежения в зависимости от условий опережающего управления.
Благодаря этим признакам, в случае электрического или гибридного транспортного средства, в котором обычно фаза электромагнитного торможения с рекуперацией энергии предшествует фазе диссипативного фрикционного торможения, предпочтительно применяют данную включения электромагнитного торможения, чтобы инициализировать фазу всасывания системы всасывания с опережением относительно фазы фрикционного торможения, которая обычно начинается позже, в зависимости от случая от нескольких сот миллисекунд до нескольких секунд после начала электромагнитного торможения.
В различных вариантах выполнения изобретения, относящихся к способу, можно также предусматривать один и/или другой из следующих признаков, рассматриваемых отдельно или в комбинации.
Согласно варианту блок управления выполнен также с возможностью получать одну или несколько данных от системы управления фрикционным торможением транспортного средства. Таким образом, даже если данная, соответствующая опережению, не получена, систему всасывания все равно приводят в действие, как только имеется в наличии или получена данная активации фрикционного торможения. Например, в случае экстренного торможения фрикционное торможение применяют, как только это становится возможным, и данная опережения электромагнитного торможения не поступает раньше данной фрикционного торможения.
Согласно варианту блок управления выполнен также с возможностью учитывать быстрое снятие ноги с педали акселератора. Это позволяет, например, упреждать фазу экстренного торможения, при которой включение фрикционного торможения следует производить как можно раньше.
Согласно варианту блок управления выполнен также с возможностью учитывать командные сигналы, управляющие топливными инжекторами теплового двигателя. Благодаря этому, сокращение времени управления инжекторами отражает реальную вероятность соответствующего торможения, и можно упредить активацию системы всасывания частиц торможения.
Согласно варианту блок управления выполнен также с возможностью учитывать картографию, содержащую зоны повышенной вероятности торможения и/или зоны длинного спуска (горный перевал). Таким образом, получают дополнительный источник информации для участия в упреждении потребности всасывания частиц торможения.
Согласно варианту блок управления выполнен также с возможностью учитывать данные от системы распознавания окружающей среды и опасностей, которая может включать в себя камеру, лидары, в частности, с функцией обнаружения препятствий. Это тоже участвует в упреждении потребности всасывания частиц торможения.
Согласно варианту блок управления выполнен также с возможностью получать информацию о текущей скорости транспортного средства, позволяющую уменьшить или прекратить управление турбиной в случае, когда транспортное средство имеет нулевую скорость. Это позволяет улучшить логику управления и избегать бесполезных фаз всасывания, например, когда транспортное средство стоит на красном свете светофора, и нога находится на педали тормоза.
Согласно варианту блок управления выполнен также с возможностью пролонгировать активацию системы всасывания на заранее определенное время задержки после одного из событий, таких как отпускание фрикционного тормоза или остановка транспортного средства (сохранение нулевой скорости). Эта пролонгация с задержкой времени тоже позволяет оптимизировать степень улавливания частиц.
Объектом настоящего изобретения является также способ управления системой всасывания частиц фрикционного торможения тормозной системы транспортного средства в транспортном средстве с обычным тепловым двигателем, при этом система всасывания содержит по меньшей мере один источник разрежения, по меньшей мере одно всасывающее отверстие 83, по меньшей мере один пневматический контур, соединяющий всасывающее отверстие с источником разрежения, и блок 6 управления, выполненный с возможностью определять условия опережающего управления источником разрежения, при этом условия опережающего управления включают в себя одно и/или другое из следующих условий: присутствие транспортного средства в зоне картографии, содержащей зоны с повышенной вероятностью торможения, присутствие транспортного средства на участке дороги с длительным спуском.
Кроме того, вышеупомянутые условия опережающего управления могут включать в себя снятие ноги с педали акселератора, изменение в сторону снижения командных сигналов, управляющих топливными инжекторами теплового двигателя.
Кроме того, вышеупомянутые условия опережающего управления могут включать в себя данные об опасности, поступающие от системы распознавания окружающей среды, которая может содержать камеры, лидары, в частности, с функцией обнаружения препятствий.
Объектом настоящего изобретения является также система для транспортного средства с обычным тепловым двигателем, выполненная с возможностью осуществления вышеупомянутого способа.
Краткое описание чертежей
Другие признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания варианта осуществления изобретения, представленного в качестве неограничивающего примера. Изобретение будет более понятно при помощи прилагаемых чертежей, на которых:
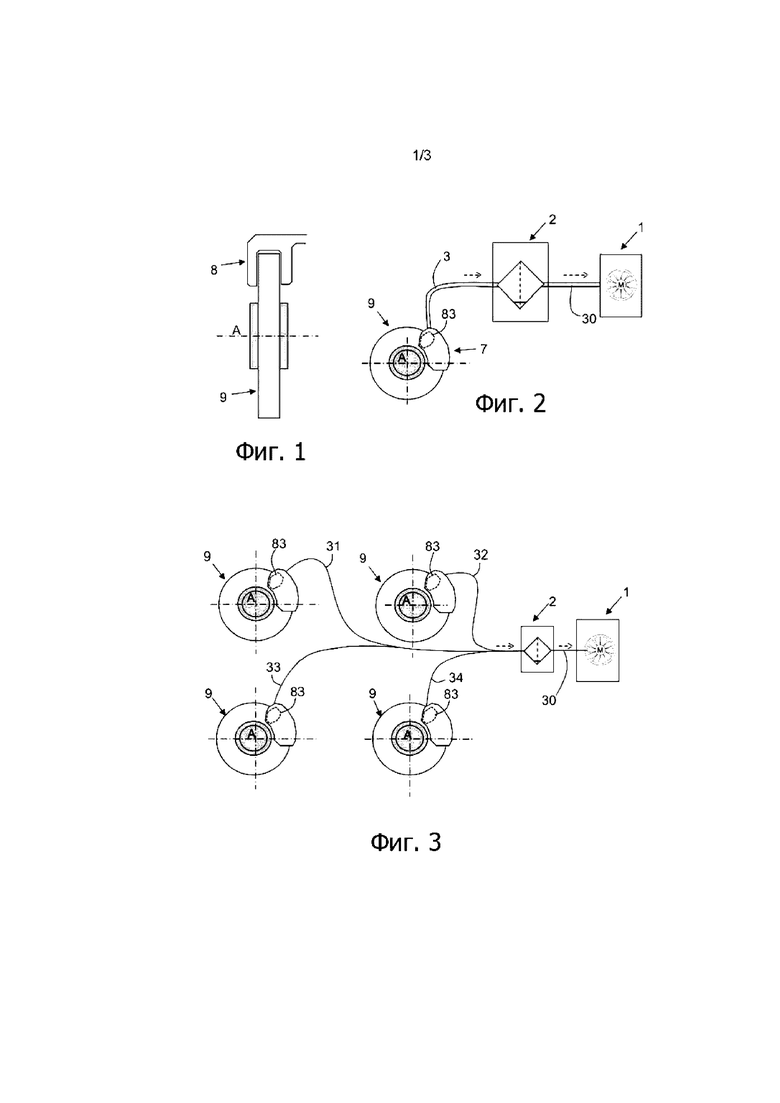
на фиг. 1 показан пример выполнения элемента фрикционного торможения, вид сбоку;
на фиг. 2 представлена принципиальная схема системы всасывания частиц торможения, применяемая для колеса или колесной оси;
на фиг. 3 приведена принципиальная схема централизованной системы всасывания частиц торможения для нескольких колес или колесных осей;
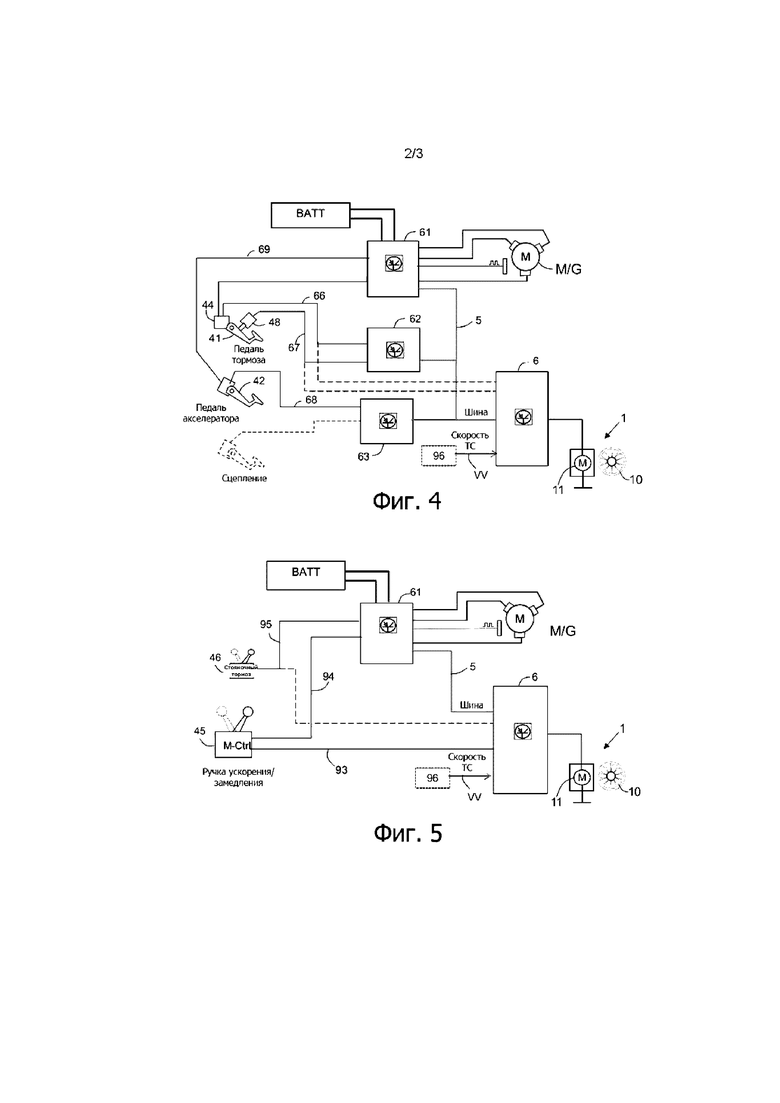
на фиг. 4 приведена принципиальная функциональная схема системы всасывания частиц торможения в контексте автотранспортного средства;
на фиг. 5 приведена принципиальная функциональная схема системы всасывания частиц торможения в контексте рельсового транспортного средства;
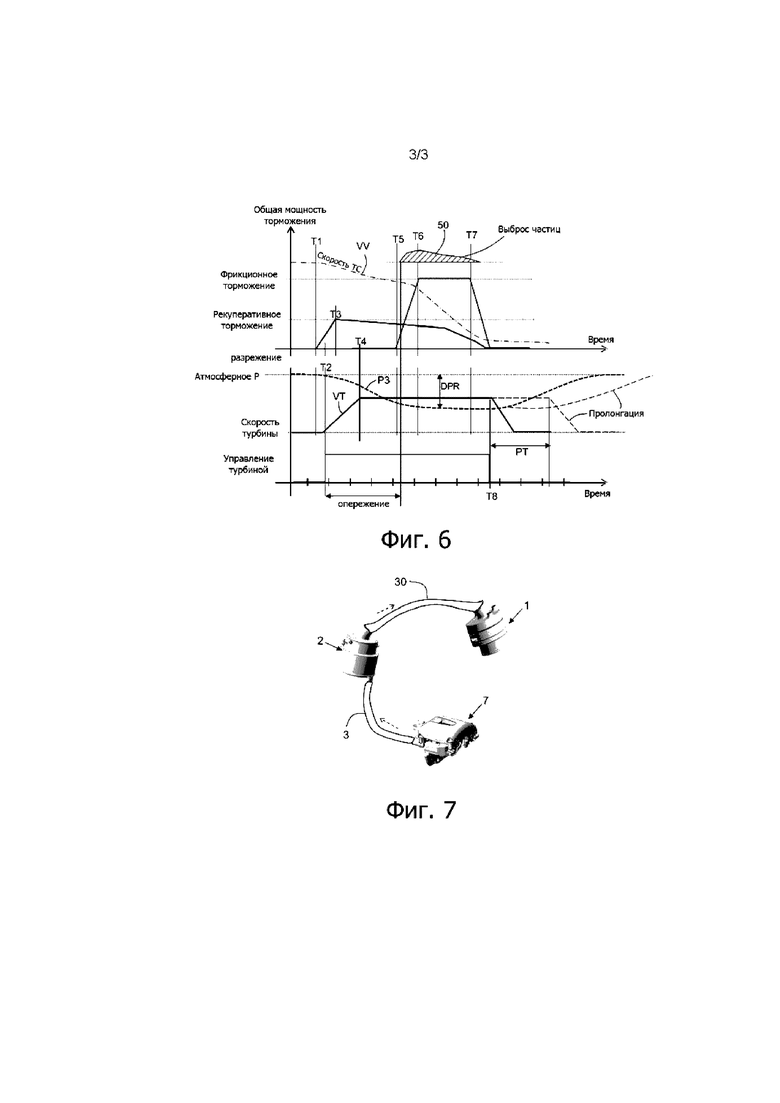
на фиг. 6 показаны графики, иллюстрирующие по меньшей мере одну функцию системы;
на фиг. 7 показана физическая иллюстрация компонентов системы всасывания частиц торможения.
Осуществление изобретения
На различных фигурах идентичные или подобные элементы имеют одинаковые обозначения. Для большей ясности некоторые элементы показаны не в масштабе.
На фиг. 1 схематично показан элемент фрикционного торможения. В представленном примере показан тормозной диск 9, предназначенный для соединения во вращении с колесом (или с колесной осью в случае рельсового транспортного средства). Диск 9 вращается вокруг оси А. Как известно, на диске расположен суппорт 7, установленный на держателе суппорта. Кроме того, суппорт содержит поршень, выполненный с возможностью действовать на фрикционные накладки, чтобы сжимать диск. Тормозные накладки (не показаны) установлены на колодках или подошвах, что само по себе известно и не будет описано подробно в данном случае.
Хотя в данном случае показана схема дискового тормоза, данное изобретение подходит также для барабанных тормозов и даже для тормозных систем с колодками, прижимаемыми непосредственно к ободу колеса.
В месте фрикционных накладок имеется устройство 8 улавливания выбрасываемых ими частиц. В частности, можно выполнить всасывающее отверстие 83 для каждой из фрикционных накладок. Пример такого устройства можно найти в документе FR3057040, поданном на имя заявителя, где частицы улавливаются в канавках, выполненных во фрикционном материале. Всасывающее отверстие может быть образовано канавкой (или канавками), соединенной со сквозным отверстием в подошве фрикционной накладки, которое сообщается с выходным проходом (в сторону фильтра).
Всасывающее отверстие 83 соединено с источником разрежения через пневматический контур.
В целом, всасывающее отверстие может находиться на траектории частиц на их выходе от границы между накладкой и вращающимся элементом (диском, барабаном, ободом…). Разряжение или поток, создаваемые в этом месте, способствуют хорошему улавливанию.
В других конфигурациях можно предусмотреть крышку, и в этом случае всасывающее отверстие образовано выходом из пространства, закрытого указанной крышкой.
Таким образом, понятно, что данное изобретение можно применять независимо от конфигурации всасывающего отверстия 83.
Как правило, при конфигурации с дисковым тормозом предусмотрено всасывающее отверстие 83 с каждой стороны диска, как показано на фиг. 1.
Всасывающее отверстие (или всасывающие отверстия в зависимости от случая) соединено с фильтром 2 через магистраль текучей среды, называемую в данном случае первым каналом 3, как показано на фиг. 2. Первый канал 3 может быть выполнен как трубопровод, хотя можно также предусмотреть проход в виде туннеля через деталь (например, через корпус суппорта). Первый канал может иметь более или менее значительную длину, причем эта длина может составлять от нескольких десятков сантиметров, например, 50 см, до нескольких метров в конфигурации централизованной фильтрации, как показано на фиг. 3.
В целом соединение по текучей среде между всасывающим отверстием и фильтром 2 может содержать одно или несколько ответвлений, переходы в виде Т, в виде Y и т.д. Для обозначения магистралей текучей среды/воздушной трубки можно также использовать термин «пневматический контур».
Соединение по текучей среде между всасывающим отверстием и фильтром 2 может содержать жесткие участки и гибкие участки магистрали.
Можно предусмотреть различные конфигурации между всасывающими отверстиями, фильтром и источником разрежения: можно предусмотреть фильтр для каждого всасывающего отверстия (максимально децентрализованная конфигурация) и даже для каждой пары всасывающих отверстий (фиг. 2), однако можно также предусмотреть только один фильтр для нескольких пар всасывающих отверстий (фиг. 3) (так называемая централизованная конфигурация) и даже только один фильтр для всего транспортного средства. Этот выбор может быть продиктован типом транспортного средства, необходимым сроком службы фильтра до его забивания, различными требованиями установки в транспортном средстве и т.д.
На фигурах показана конфигурация при разрежении с фильтром, установленным между первым каналом 3 и источником 1 разрежения, всасывающим частицы через фильтр, который при этом находится под разрежением по отношению к окружающему внешнему давлению. Вместе с тем, в непоказанной конфигурации источник разрежения может находиться между первым каналом и фильтром, и в этом случае турбина всасывает частицы, затем турбина нагнетает их в фильтр (фильтр находится под повышенным давлением вместо разрежения).
В типовом примере выполнения фильтр 2 может содержать фильтрующее средство типа бумаги или другого материала, который пропускает воздух и задерживает мелкие частицы, содержащиеся в потоке, поступающем из всасывающих отверстий.
Термин «фильтр» следует понимать в данном случае в широком смысле, и он охватывает решения с центробежным фильтром (типа «циклона»), решения с фильтром электромагнитного улавливания, решения с фильтром электростатического улавливания. Термин «фильтр» включает в себя также решение, в котором частицы направляются в уже существующий фильтр, такой как воздушный фильтр салона, или в фильтр каталитического глушителя.
Фильтр-улавливатель 2 частиц выполнен с возможностью фильтрации воздуха, поступающего из всасывающих отверстий и содержащего твердые частицы, имеющие микрометрические или миллиметровые размеры, то есть он пропускает воздух через фильтрующее средство, тогда как частицы задерживаются фильтрующим средством.
В представленном примере источник 1 разрежения образован всасывающей турбиной 10, приводимой во вращение электрическим двигателем 11.
В представленном примере турбина с электрическим двигателем образует блок, отдельный от фильтра. В этих условиях предусмотрена вторая магистраль 30 текучей среды для соединения турбины с фильтром. В зависимости от конфигураций транспортного средства и от централизованного или не централизованного варианта решения длина трубопроводов может быть более или менее значительной. Чем длиннее трубопровод, тем больше объем воздуха, присутствующего в трубопроводе, и тем длительнее время реакции для получения требуемого разрежения, что и обуславливает интерес представленного ниже решения.
Следует отметить, что возможна также конфигурация с турбиной и фильтром в едином блоке, и в этом случае вторая пневматическая магистраль отсутствует.
Система всасывания содержит также блок 6 управления, выполненный с возможностью управлять турбиной. Блок управления может управлять данной турбиной по принципу «все или ничего», например, через реле управления.
Постоянное напряжение, используемое для питания двигателя, может зависеть от области применения системы всасывания частиц, например, 12 вольт на классических автотранспортных средствах, 24 вольта на большегрузных транспортных средствах или промышленных транспортных средствах типа грузовиков или автобусов, или 72 вольта на рельсовых транспортных средствах (трамвай, поезд).
Согласно частному варианту осуществления, блок 6 управления может генерировать командный сигнал для управления скоростью двигателя, при этом можно предусмотреть, чтобы логика управления применяла модулированный сигнал ШИМ (широтно-импульсная модуляция).
Следует отметить, что вместо всасывающей турбины источник разрежения уже может существовать на транспортном средстве, в частности, в области автомобильной промышленности он может быть источником разрежения, создаваемого при работе двигателя транспортного средства, например, в виде отвода от впуска воздуха, или в другом примере посредством применения эффекта Вентури в потоке выходящих газов, например, выхлопных газов. В случае рельсового транспорта источник разрежения может быть производным пневматического тормозного оборудования или другого вспомогательного оборудования рассматриваемого рельсового транспортного средства.
Для всасывания частиц торможения, производимых при истирании, внутри первого канала 3 создают разрежение требуемого значения.
Как показано на фиг. 4, блок 6 управления получает данные от других устройств, присутствующих на транспортном средстве.
Прежде всего, в контексте гибридного транспортного средства система транспортного средства содержит тяговую цепь с электрическим двигателем и батареей ВАТТ, а также с тепловым двигателем. Часто батарея является силовой батареей ВАТТ, способной обеспечивать движение транспортного средства без участия теплового двигателя (ноль выбросов от сгорания). В контексте чисто электрического транспортного средства силовая батарея ВАТТ является единственным источником энергии: тепловой двигатель отсутствует.
Таким образом, присутствует электрическая машина, обозначенная M/G. Такая электрическая машина соединена с колесами транспортного средства тем или иным образом и более или менее напрямую. Такой электрической машиной можно управлять, как электрическим двигателем, или можно управлять, как электрическим генератором в зависимости от конфигураций использования.
Мощность такой электрической машины может составлять от 1 кВт до 100 киловатт в зависимости от того, идет ли речь о микрогибридной конфигурации (электрическое усиление и рекуперативное торможение) для применяемых низких мощностей, или о «полногибридной» конфигурации с нулевым режимом выброса от сгорания на низких скоростях (и, разумеется, с рекуперативным торможением) при средних мощностях, и, наконец, при максимальных мощностях, когда речь идет о конфигурациях транспортных средств с чисто электрическим режимом движения (в случае необходимости, с устройством продления автономии).
Следует отметить, что во всех вышеперечисленных случаях электрической машиной можно управлять, как электрическим генератором в режиме рекуперации энергии, что соответствует фазе рекуперативного торможения. Следовательно, предпочтительно говорят о тягово-тормозной цепи транспортного средства.
Для управления электрической машиной предусмотрено вычислительное устройство 61 управления. Говоря о рассматриваемой электрической машине, можно также использовать термин «двигатель/генератор» M/G. Электрическая машина может быть выполнена как генератор-стартер, представляющий собой агрегат двигателя или агрегат трансмиссии.
Управление электрической машиной по мощности или по крутящему моменту либо в режиме двигателя, либо в режиме генератора само по себе известно, и его подробное описание опускается. Вместе с тем, следует отметить, что вычислительное устройство управления электрической машиной может выдавать данную, характеризующую активацию режима рекуперативного торможения на электрической машине. Использование этой данной будет описано ниже. Для обозначения рекуперативного торможения используют также термин «электромагнитное торможение».
Система содержит также педаль 41 тормоза, предназначенную для приведения в действие водителем транспортного средства. В некоторых конфигурациях просто предусмотрен двоичный переключатель 48 типа «все или ничего», взаимодействующий с тормозной педалью 41. Этот переключатель может выдавать данную 67 непосредственно в блок 6 управления системой всасывания. В другом варианте осуществления переключатель 68 соединен с блоком 62 управления функцией торможения, например, с блоком, управляющим функцией ABS, который будет передавать одну или несколько данных через мультиплексную шину 5 в блок 6 управления всасыванием (не исключена также проводная линия связи).
Согласно другой конфигурации, можно предусмотреть более насыщенную информацию типа аналоговой или цифровой, точно отражающую текущее положение тормозной педали, что позволяет блоку 6 управления, с одной стороны, определять интенсивность торможения и, с другой стороны, иметь возможность заблаговременно действовать с самого начала воздействия пользователя или водителя на тормозную педаль. В этом случае предусмотрен аналоговый или цифровой потенциометр 44, который выдает насыщенную информацию 66 в блок 6 управления системой всасывания напрямую (пунктирная линия) или через блок 62 управления функцией торможения.
Согласно еще одной конфигурации, привод торможения может представлять собой любой другой тип педали или манипулятор в зависимости от типа оборудования или транспортных средств (автомобильные, рельсовые и т.д.).
Кроме тормозной педали, в примере, представленном на фиг. 4, предусмотрена педаль 42 акселератора, что само по себе известно. Педаль акселератора может выдавать аналоговый или цифровой электрический сигнал, характеризующий текущее положение педали на допустимом ходе педали акселератора. В рамках гибридного транспортного средства данная текущего положения поступает одновременно в вычислительное устройство 63 управления тепловым двигателем и в вычислительное устройство 61 управления электрической машиной через лини связи 69, 68. Разумеется, данная педали акселератора может также поступать только в одно вычислительное устройство, которое передает данную в другие вычислительные устройства через мультиплексную шину 5.
Блок 6 управления выполнен с возможностью учитывать быстрое снятие ноги с педали акселератора, чтобы упредить фазу экстренного торможения, при которой необходимо как можно раньше произвести фрикционное торможение.
Блок 6 управления выполнен с возможностью учитывать командные сигналы, управляющие топливными инжекторами теплового двигателя. Так, сокращение времени управления инжекторами по-другому отображает быстрое снятие ноги и, следовательно, существенную вероятность последующего торможения, и в этом случае производят опережающую активацию системы всасывания частиц торможения.
Как правило, различные применяемые вычислительные устройства 6, 61, 62, 63 могут сообщаться между собой через надежную и быструю линию связи типа мультиплексной шины CAN.
Блок 6 управления использует также данную текущей скорости VV транспортного средства. Она может поступать от специального датчика или может выдаваться одним из бортовых вычислительных устройств 96.
Согласно еще одной конфигурации, показанной, в частности, на фиг. 5, система содержит манипулятор 45, который одновременно служит для управления ускорением и замедлением. Эта конфигурация является типичной для рельсового транспорта. Манипулятор соединен с вычислительным устройством 61 управления тягой через мультиплексную или не мультиплексную линию связи 94. Манипулятор соединен с блоком 6 управления всасыванием через мультиплексную или не мультиплексную линию связи 93.
Например, когда машинист толкает ручку 45 вперед, он подает команду на работу электрической машины (или электрических машин) в режиме двигателя (положительный крутящий момент) с командой движения вперед, тогда как, когда, наоборот, машинист тянет ручку 45 назад, он подает команду на отрицательный крутящий момент, то есть на работу в режиме генератора для торможения транспортного средства.
Система может дополнительно содержать вспомогательный привод 46 управления для активации или отключения стояночного тормоза. Этот стояночный тормоз можно также использовать в качестве рабочего тормоза или аварийного тормоза в некоторых конфигурациях при помощи линии связи 95. В этом случае можно предусмотреть также проводную связь, соединяющую этот привод с блоком 6 управления, чтобы учитывать его в логике управления.
Другие элементы, представленные на фиг. 5, являются идентичными или подобными элементам, описанным со ссылками на фиг. 4.
На фиг. 6 при помощи графика представлен пример логики работы и соответствующего способа управления.
В момент Т1 водитель нажимает на педаль тормоза (или соответственно тянет манипулятор), что приводит к активации фазы рекуперативного торможения, то есть к управлению электрической машиной в режиме генератора. Эта данная передается в реальном времени в блок 6 управления средствами всасывания, при этом команда управления всасывающей турбиной передается в момент Т2. Начиная с этого момента, давление в первом канале и во всасывающем отверстии, обозначенное Р3, понижается (кривая отходит от значения атмосферного давления вниз). В этот момент фрикционное торможение еще не началось; именно с учетом этого эту логику можно назвать опережающим управлением всасывания. Момент Т3 соответствует максимуму электромагнитного торможения.
В момент Т4 турбина достигает своей заданной скорости, и давление Р3 продолжает понижаться, достигая уровня целевого разрежения, обозначенного DPR.
Значение заданного разрежения DPR определяют в диапазоне 20-40 миллибар ниже окружающего давления.
Момент Т5 соответствует началу фазы фрикционного торможения.
Момент Т6 соответствует моменту, когда фрикционное торможение достигает своей номинальной мощности.
Заштрихованная зона 50 отображает количество частиц, выделяемых при трении между накладкой и вращающимся элементом.
Учитывая, что в момент Т5 разрежение достигло целевого значения DPR, эффективность всасывания является максимальной с самого начала выброса частиц.
Момент Т7 соответствует началу отпускания тормозной педали 41.
Момент Т8 соответствует прерыванию управления турбиной.
Кривая, обозначенная Р3, отображает давление внутри первого канала 3, то есть по существу давление всасывания, прикладываемое к всасывающему отверстию 83.
Кривая, отображающая скорость транспортного средства, показывает, что электромагнитное торможение тем эффективнее, чем выше текущая скорость, и кривая показывает также, что фрикционное торможение обеспечивает более высокую степень замедления, чем электромагнитное торможение.
Согласно возможному варианту предусмотрена задержка продления (обозначенная РТ) управления активацией турбины после момента Т8, когда торможение реально прекратилось.
Говоря другими словами, блок 6 управления осуществляет способ, включающий в себя следующие действия:
- получают одну или несколько данных от вычислительного устройства управления двигателем-генератором тягово-тормозного устройства транспортного средства,
- устанавливают условия опережающего управления источником разрежения в зависимости от по меньшей мере одного сигнала электромагнитного торможения,
- управляют источником разрежения в зависимости от условий опережающего управления.
Логика управления может использовать также другие источники информации.
Например, можно использовать данную скорости VV транспортного средства, чтобы избегать активации системы всасывания, когда скорость транспортного средства является нулевой или остается нулевой.
Кроме того, блок управления может быть выполнен с возможностью учитывать данные, поступающие от системы распознавания окружающей среды, которая может включать в себя камеры, лидары, в частности, с функцией обнаружения препятствий, в рамках устройств обеспечения вождения или передачи вождения.
Согласно другому примеру предусмотрена пролонгация активации турбины после действительной фазы торможения в течение заранее определенного времени, которое может быть либо фиксированным, либо зависеть от калибровки (фиксированная пролонгация РТ или пролонгация в результате калибровки).
Согласно еще одному примеру блок управления выполнен также с возможностью учитывать картографию, содержащую зоны повышенной вероятности торможения и/или зоны длительного спуска, например, дорога на горном перевале во время спуска.
Согласно еще одному примеру блок управления выполнен также с возможностью учитывать поток данных, поступающих от вычислительного устройства электромагнитного торможения, отвечающего за управление вспомогательной системой торможения электродинамического типа, например, тормозом-замедлителем, который часто встречается на большегрузных транспортных средствах.
Чтобы установить порядки величины, мощность, потребляемая турбиной 10 и ее электрическим двигателем 11, может составлять от тридцати ватт до одного киловатта и выше, на практике эта мощность может находиться в диапазоне [30 Вт - 800 Вт] в зависимости от количества обслуживаемых всасывающих отверстий, а также в зависимости от длины трубопроводов, которые создают небольшую потерю напора.
В конфигурации скорость турбины может составлять от 0 до 12 000 об/мин.
В конфигурации скорость турбины может составлять от 0 до 30 000 об/мин.
Время реакции турбины, чтобы перейти от нуля до заданной скорости, обычно может составлять от 10 мс до 700 мс, чаще всего при применении в автомобиле - от 400 мс до 600 мс.
На фиг. 3 показаны централизованный фильтр, централизованный датчик давления и каналы или трубопроводы 31, 32, 33, 34, которые позволяют соединить каждое из всасывающих отверстий 83 с фильтром 2.
Следует отметить, что может быть несколько фильтров, обслуживаемых одной турбиной.
Необходимо отметить, что метод опережения можно также применять на стационарных машинах, таких как ветроустановки или промышленные машины, чтобы затормаживать ротор на основании данных управления, предшествующих реальному применению фрикционного торможения. Эти данные опережения могут быть получены от вычислительного устройства управления электрической машиной, которое управляет ротором в режиме двигателя или в режиме генератора.
Изобретение относится к тормозным системам. Система всасывания частиц торможения фрикционной тормозной системы транспортного средства в гибридном или электрическом транспортном средстве содержит источник разрежения, всасывающее отверстие, соединенное через пневматический контур с источником разрежения, блок управления, выполненный с возможностью управлять источником разрежения. Поток данных поступает от вычислительного устройства управления двигателем-генератором тягово-тормозного устройства транспортного средства. Блок управления управляет источником разрежения с опережением по отношению к действительной активации фрикционного торможения. Управление происходит в зависимости от активации электромагнитного торможения. Повышается эффективность улавливания частиц. 2 н. и 10 з.п. ф-лы, 7 ил.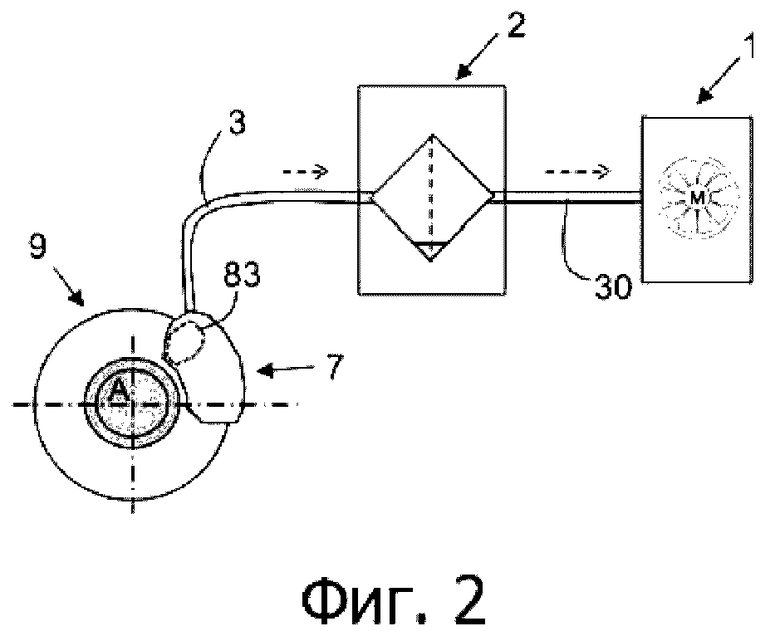
1. Система всасывания частиц торможения фрикционной тормозной системы транспортного средства в гибридном или электрическом транспортном средстве, при этом система всасывания содержит:
по меньшей мере один источник (1) разрежения, по меньшей мере одно всасывающее отверстие (83), соединенное через пневматический контур (3, 30) с источником разрежения, блок (6) управления, выполненный с возможностью управлять источником разрежения,
отличающаяся тем, что система всасывания содержит также поток данных, поступающих от вычислительного устройства (61) управления двигателем-генератором тягово-тормозного устройства транспортного средства,
при этом блок управления выполнен с возможностью управлять источником разрежения с опережением по отношению к действительной активации фрикционного торможения, при этом блок управления управляет источником разрежения по меньшей мере в зависимости от активации электромагнитного торможения.
2. Система по п. 1, дополнительно содержащая по меньшей мере один фильтр (2) для сбора всасываемых частиц.
3. Система по п. 2, в которой пневматический контур содержит первый канал (3), соединяющий всасывающее отверстие с фильтром, при этом фильтр (2) установлен между первым каналом (3) и источником (1) разрежения.
4. Система по одному из пп. 1-3, в которой источник разрежения образован турбиной (10), приводимой во вращение электрическим двигателем (11).
5. Система по одному из пп. 1-4, в которой система всасывания содержит также поток данных, поступающих от вычислительного устройства электродинамического торможения, и блок управления выполнен с возможностью управлять источником разрежения в зависимости от активации электродинамического торможения.
6. Система по одному из пп. 1-5, в которой предусмотрен по меньшей мере один второй канал (30), соединяющий фильтр с источником разрежения, предпочтительно в централизованной конфигурации, в которой фильтр и турбина соединены по меньшей мере с четырьмя всасывающими отверстиями.
7. Способ управления системой всасывания частиц фрикционного торможения тормозной системы транспортного средства, при этом система всасывания содержит:
по меньшей мере один источник разрежения, по меньшей мере одно всасывающее отверстие (83), по меньшей мере один пневматический контур (3, 30), соединяющий всасывающее отверстие с источником разрежения, и блок (6) управления, выполненный с возможностью осуществлять следующие этапы, на которых:
- получают одну или несколько данных от вычислительного устройства управления двигателем-генератором тягово-тормозного устройства транспортного средства,
- устанавливают условия опережающего управления источником разрежения в зависимости от по меньшей мере одного сигнала электромагнитного торможения,
- управляют источником разрежения в зависимости от условий опережающего управления.
8. Способ по п. 7, в котором блок управления выполнен также с возможностью получать одну или несколько данных от системы управления фрикционным торможением транспортного средства.
9. Способ по одному из пп. 7, 8, в котором блок управления выполнен также с возможностью учитывать быстрое снятие ноги с педали акселератора.
10. Способ по одному из пп. 7-9, в котором блок управления выполнен также с возможностью получать информацию о текущей скорости транспортного средства, позволяющую уменьшить или прекратить управление турбиной в случае, когда транспортное средство имеет нулевую скорость.
11. Способ по одному из пп. 7-10, в котором блок управления выполнен также с возможностью пролонгировать активацию системы всасывания на заранее определенное время задержки после одного из событий, таких как отпускание фрикционного тормоза или остановка транспортного средства (сохранение нулевой скорости).
12. Способ по одному из пп. 7-11, в котором блок управления выполнен также с возможностью учитывать картографию, содержащую зоны повышенной вероятности торможения и/или зоны длинного спуска.
| DE 102011111594 A1, 28.02.2013 | |||
| DE 19643869 A1, 07.05.1998 | |||
| US 2017198772 A1, 13.07.2017 | |||
| DE 102016117778 A1, 22.03.2018 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ГОРЬКОЙ НАСТОЙКИ И ГОРЬКАЯ НАСТОЙКА | 2012 |
|
RU2499821C1 |

