Область техники
Изобретение относится к системам всасывания тормозных частиц в системах фрикционного торможения. Такие системы фрикционного торможения могут быть установлены на автомобильных или железнодорожных транспортных средствах. Такие системы фрикционного торможения также могут быть установлены на стационарных роторных машинах, таких как ветровые турбины или промышленные машины.
Уровень техники
В таких системах, как описаны, например, в документе DE4240873, предусматривают всасывающую турбину и фильтр сбора частиц. Частицы от трения, таким образом, постепенно собирают в собирающем фильтре. Это приводит к нарастающему засорению фильтра. Чтобы продолжать корректно собирать частицы даже в случае, когда имеет место сильное засорение фильтра, это нарастающее засорение требует такого всасывающего усилия, которое соответствует случаю, в котором фильтр вызывает высокие потери в линии.
Наоборот, если фильтр новый, то в пневматической линии имеют место очень низкие потери, всасывающее усилие может оказаться слишком высоким, и сопутствующий шум, генерируемый турбиной, вращающейся на высокой скорости, может оказаться раздражающим.
Задачей изобретения является создание усовершенствованного решения в отношении нарастающего загрязнения фильтра.
Раскрытие изобретения
Задача решается системой всасывания тормозных частиц от системы фрикционного торможения транспортного средства, содержащей:
по меньшей мере один источник отрицательного давления (например, турбину или другое средство), по меньшей мере один всасывающий патрубок, соединенный пневматическим контуром с источником отрицательного давления, и блок управления, выполненный с возможностью управления источником отрицательного давления,
характеризующаяся тем, что система всасывания дополнительно содержит устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, при этом блок управления способен управлять источником отрицательного давления так, чтобы текущие параметры воздушного потока в пневматическом контуре достигали или стремились к по меньшей мере одному заданному значению для параметров воздушного потока.
Выражение «заданное значение для параметров воздушного потока» следует понимать, как предварительно заданное значение, но не исключая, что это заданное значение является функцией от времени или от рабочих параметров (см. ниже).
Выражение «устройство определения текущих параметров воздушного потока» следует понимать либо как датчик давления, либо как датчик потока, либо электрическое измерительное устройство для измерения величины, отражающей по меньшей мере один требуемый параметр воздушного потока.
Что касается выражения «пневматический контур, который соединяет всасывающий патрубок с источником отрицательного давления», то следует понимать, что оно означает канал, который ведет от всасывающего патрубка к турбине, либо непосредственно, либо через фильтр. Первый канал расположен ниже по потоку всасывающего патрубка на траектории частиц, и ведет от всасывающего патрубка к фильтру; турбина может быть расположена ниже по потоку фильтра или наоборот. Первый канал целиком или частично находится под отрицательным давлением, не исключая того, что участок ниже по потоку турбины находится под положительным давлением (фильтр ниже по потоку турбины).
Посредством этих устройств, связывая управление с требуемым заданным значением для параметров воздушного потока, получают эффективность всасывания, которая по существу не зависит от уровня загрязнения фильтра. Также, если фильтр новый, то требуемая мощность сравнительно низкая, и в случае использования турбины ее скорость вращения довольно низкая, что позволяет гарантировать очень невысокий уровень шума. Система сконструирована так, чтобы по мере того, как собирают частицы, а уровень загрязнения увеличивается, обеспечивать большую мощность всасывания для достижения того же самого заданного значения состояния воздушного потока.
Кроме того, использование такого датчика параметров воздушного потока позволяет сделать работу и эффективность системы всасывания более надежной, а также предложить некоторые диагностические функции для особых ситуаций, например, в случае отсоединения патрубка.
Кроме того, в случае специальной турбины с электрическим двигателем управление ею позволяет получить наименьшее возможное потребление электроэнергии для ее функционирования, абсолютный минимум.
Выражение «источник отрицательного давления» следует понимать либо как турбину, специальную для выполнения всасывания тормозных частиц, либо как источник отрицательного давления, предустановленный в транспортном средстве, который используют управляемым образом для всасывания частиц в сбирающий фильтр.
В случае измерения давления устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, представляет собой датчик давления для измерения давления, преобладающего в пневматическом контуре, и давление отражает текущие параметры воздушного потока, при этом блок управления способен управлять источником отрицательного давления так, чтобы давление в пневматическом контуре достигало или стремилось к предварительно заданному значению отрицательного давления (DPR).
Такое устройство обеспечивает эффективность всасывания, которая по существу не зависит от уровня загрязнения фильтра. Если фильтр новый, то требуемая мощность сравнительно низкая, а в случае использования турбины ее скорость вращения довольно низкая, что позволяет гарантировать очень невысокий уровень шума. Система сконструирована так, чтобы по мере того, как собирают частицы, а уровень загрязнения увеличивается, обеспечивать большую мощность всасывания для достижения одинакового заданного значения отрицательного давления в пневматическом контуре.
Помимо решения с датчиком давления можно использовать датчик потока для измерения параметров воздушного потока в пневматическом контуре либо электрическое измерительное устройство для измерения величины, представляющей по меньшей мере один параметр воздушного потока.
Выражение «заданное значение отрицательного давления» следует понимать, как предварительно заданное значение, но не исключая, что это заданное значение отрицательного давления является функцией от времени или от рабочих параметров.
В вариантах выполнения изобретения, относящихся к системе можно использовать одно или несколько устройств по-отдельности или их комбинацию.
В соответствии с предпочтительным вариантом выполнения источник отрицательного давления образован турбиной, приводимой в действие электрическим двигателем. Таким образом, блок управления управляет скоростью вращения электрического двигателя для управления отрицательным давлением, создаваемым турбиной. В случае электрического двигателя, управляемого напряжением постоянного тока может быть подано напряжение, например, 12 В, 24 В или 72 В для того, чтобы управляющая логика использовала управляющий сигнал, модулированный с использованием широтно-импульсной модуляции (ШИМ).
В соответствии с альтернативным вариантом выполнения источник отрицательного давления образован источником отрицательного давления, уже имеющимся в транспортном средстве, в частности, в случае автомобильной отрасли, источник отрицательного давления, индуцируемый работой двигателя транспортного средства, например, отвод от воздухозаборника, или в другом примере путем использования эффекта Вентури на потоке выходящего газа, например, выхлопного газа. В случае железнодорожного транспорта, источник отрицательного давления может быть получен от пневматической тормозной системы или от другой вспомогательной системы железнодорожного транспортного средства.
В соответствии с одним из вариантов выполнения датчик давления расположен возле фильтра или интегрирован в него. Таким образом, предложено компактное мехатронное решение и упрощенная сборка.
В соответствии с одним из вариантов выполнения, система может содержать по меньшей мере один фильтр для сбора всасываемых частиц.
В соответствии с одним из вариантов выполнения, система содержит централизованный фильтр и турбину, соединенные с четырьмя или более всасывающими патрубками. Тем самым, оптимизируют стоимость полного решения. Можно выполнить единственный датчик давления (соответственно единственный датчик параметров воздушного потока) для выполнения всей работы.
В соответствии с одним из вариантов выполнения, система содержит децентрализованный фильтр и турбину, а именно, для каждого всасывающего патрубка или пары всасывающих патрубков. Таким образом, мощность источника отрицательного давления, в частности скорость вращения турбины, специально адаптируют для каждого средства торможения. Можно даже обеспечить наличие фильтра, турбины и всасывающего патрубка на каждую колодку или на каждую сторону диска, например, в области железнодорожного транспорта.
В соответствии с вариантом выполнения, блок управления выполнен с возможностью обнаружения предварительно заданного уровня загрязнения фильтра и передачи сообщения пользователю. Это позволяет информировать пользователя о необходимости замены фильтра, будь то владелец, водитель или лицо, отвечающее за техническое обслуживание транспортного средства. На практике блок управления может передавать сообщение на приборную панель транспортного средства или на удаленный сервер, отвечающий за управление техническим обслуживанием транспортного средства. Отметим, что когда двигатель достигает максимальной скорости, индикатор загрязнения будет активирован, если отрицательное давление достигло минимального уровня, который не является заданным значением. Также отметим, что уровень шума, создаваемого турбиной, также может служить в качестве индикатора завершения срока службы.
В соответствии с одним из вариантов выполнения заданное значение отрицательного давления выбрано в диапазоне от 20 до 40 миллибар ниже атмосферного давления. Преимущественно, это оптимальный диапазон для эффективного захвата тормозных частиц, при сохранении разумного и недорогого задания умеренных размеров элементов системы.
Изобретение также относится к способу управления системой всасывания частиц от фрикционного торможения системы торможения транспортного средства, причем система всасывания содержит:
по меньшей мере один источник отрицательного давления, например, турбину или другой источник; по меньшей мере один всасывающий патрубок (83), соединенный пневматическим контуром (3, 30) с источником отрицательного давления; блок (6) управления и устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, при этом блок управления выполнен с возможностью:
a) управления источником отрицательного давления, например, скоростью вращения турбины, в соответствии с предварительно заданными параметрами активации,
b) измерения текущих параметров воздушного потока, преобладающих в пневматическом контуре,
c) определения разницы между текущими параметрами воздушного потока и по меньшей мере одним заданным значением для параметров воздушного потока,
d) регулирования используемых сигналов управления для настраивания мощности источника давления или вращения турбины в зависимости от указанной разницы.
Кроме того, для типичного случая измерения давления предложен способ управления системой всасывания частиц от фрикционного торможения системы торможения транспортного средства, причем система всасывания содержит:
по меньшей мере один источник отрицательного давления, турбину или другой источник; по меньшей мере один всасывающий патрубок (83), соединенный пневматическим контуром (3, 30) с источником отрицательного давления; блок (6) управления и датчик (22) давления, при этом блок управления выполнен с возможностью:
a) управления источником отрицательного давления, например, скоростью вращения турбины, в соответствии с предварительно заданными параметрами активации,
b) измерения давления в пневматическом контуре посредством датчика давления,
c) определения разницы между текущим давлением и заданным значением отрицательного давления,
d) регулирования используемых сигналов управления для настраивания мощности источника давления или вращения турбины в зависимости от указанной разницы.
В различных вариантах осуществления изобретения, относящихся к способу можно использовать одно или следующих устройств по-отдельности или в сочетании.
В соответствии с одним из вариантов выполнения, блок управления дополнительно выполнен с возможностью обнаружения предварительно заданного уровня загрязнения фильтра, когда контрольное заданное значение для источника отрицательного давления превосходит предварительно заданный порог, так что текущие параметры воздушного потока достигают заданного значения для параметров воздушного потока.
В типичном случае датчика давления блок управления выполнен с возможностью обнаружения предварительно заданного уровня загрязнения фильтра, когда контрольное заданное значение для источника отрицательного давления превосходит предварительно заданный порог, так что давление достигает предварительно заданного значения отрицательного давления, или так что заданное значение не достигается, не смотря на команду задания максимальной мощности источника отрицательного давления.
В типичном случае использования датчика давления и электрически управляемой турбины блок управления дополнительно выполнен с возможностью определения предварительно заданного уровня загрязнения фильтра, когда контрольное заданное значение вращения турбины превосходит предварительно заданный порог, так что давление достигает предварительно заданного значения отрицательного давления.
В соответствии с одним из вариантов выполнения блок управления дополнительно выполнен с возможностью передачи сообщения пользователю, когда определено состояние загрязнения. Таким образом, владелец, водитель или лицо, ответственное за техническое обслуживание транспортного средства, может быть проинформирован о необходимости замены фильтра.
В соответствии с одним из вариантов выполнения, заданное значение (отрицательное давление или в более общем случае состояние воздушного потока) не является постоянным значением, а может быть определено в соответствии с различными условиями работы (температура, влажность, скорость транспортного средства). Кроме того, заданное значение может зависеть от момента времени фазы торможения. Таким образом, можно усовершенствовать управление и контроль отрицательного давления с обратной связью только до необходимого уровня.
В соответствии с одним из вариантов выполнения источником отрицательного давления является турбина, при этом уровень шума, испускаемого вращением турбины, превышает определенный звуковой порог, и может быть воспринят пользователем, когда управляющие сигналы, используемые для вращения турбины, превышают заданное значение. Другими словами, свист турбины - это звуковой сигнал, который служит индикатором, подталкивающим пользователя заменить фильтр.
Другие особенности, цели и преимущества изобретения будут понятны из последующего описания варианта осуществления изобретения, приведенного в качестве неограничивающего примера со ссылкой на приложенные чертежи.
Краткое описание чертежей
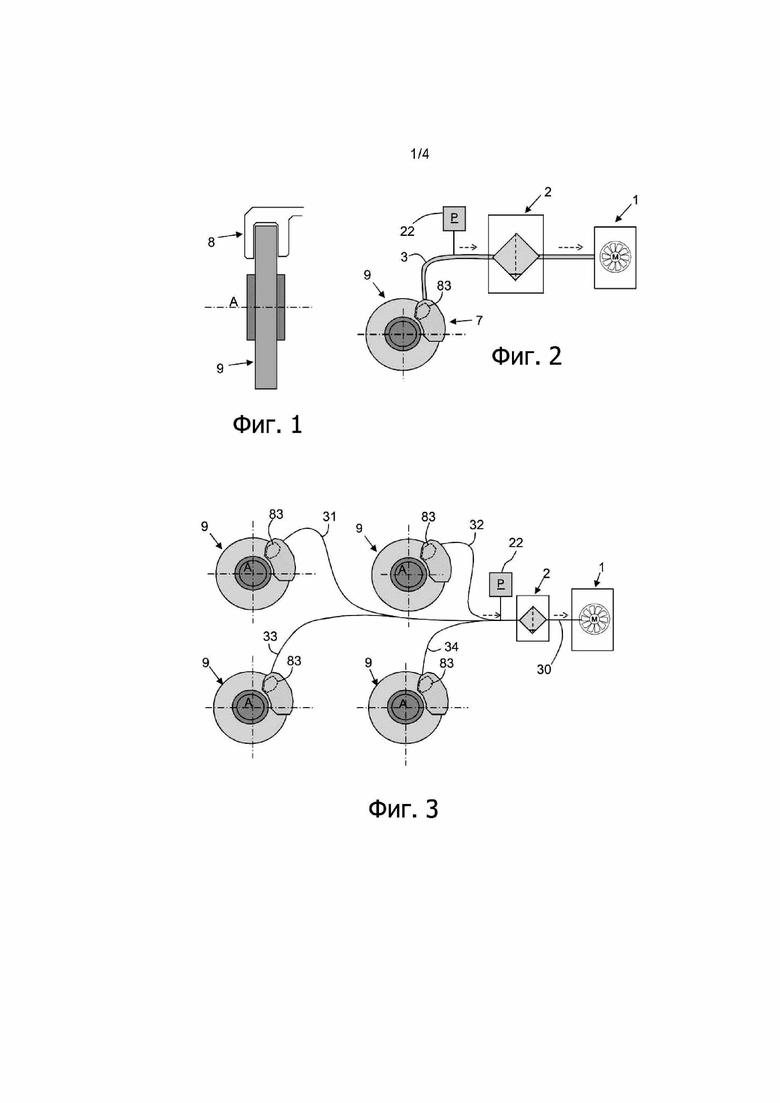
На фиг. 1 показан пример элемента фрикционного тормоза, вид сбоку;
на фиг. 2 - схема локализованной системы всасывания тормозных частиц для колеса или оси;
на фиг. 3 - схема централизованной системы всасывания тормозных частиц на нескольких колесах или осях;
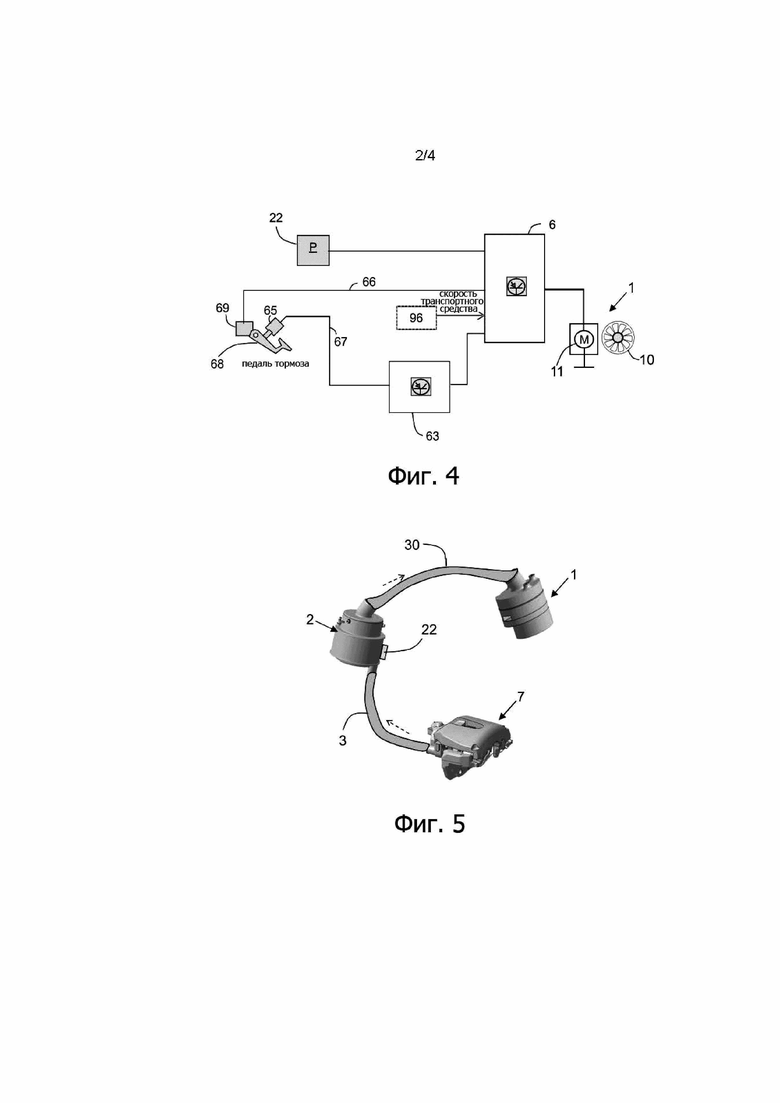
на фиг. 4 - блок-схема системы всасывания тормозных частиц;
на фиг. 5 - компоненты системы всасывания тормозных частиц;
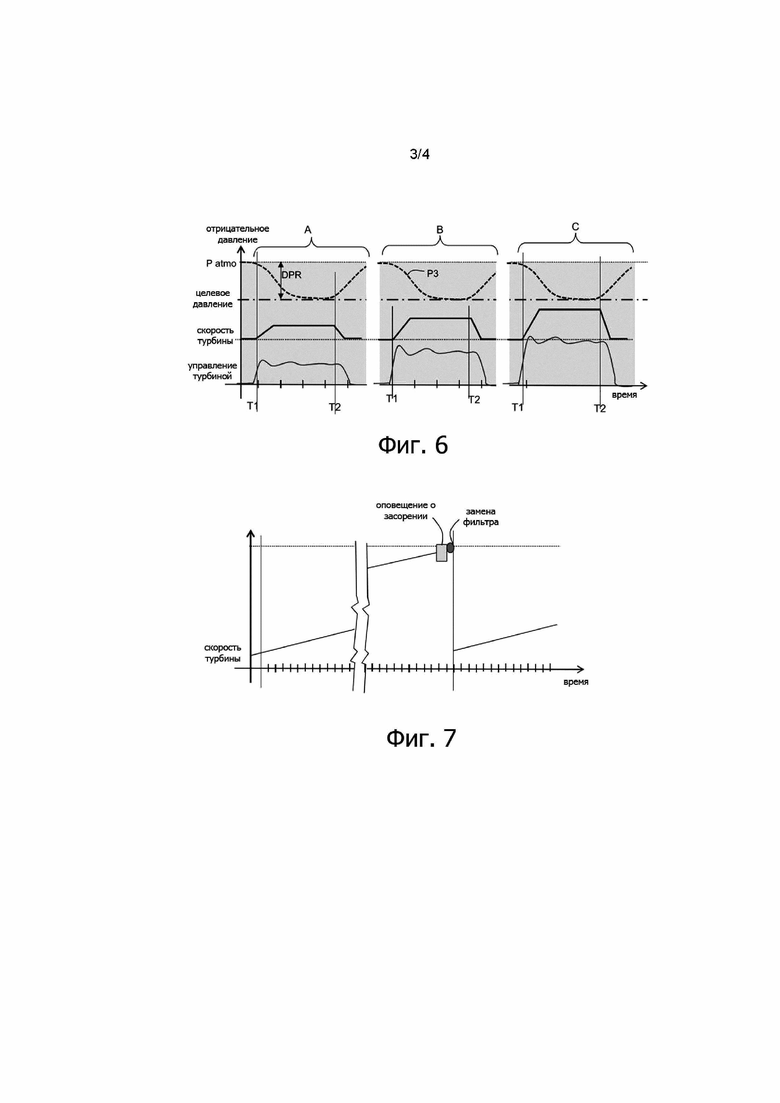
на фиг. 6 - временные графики, показывающие по меньшей мере одну функциональную возможность системы;
на фиг. 7 - временные графики, показывающие по меньшей мере одну функциональную возможность системы;
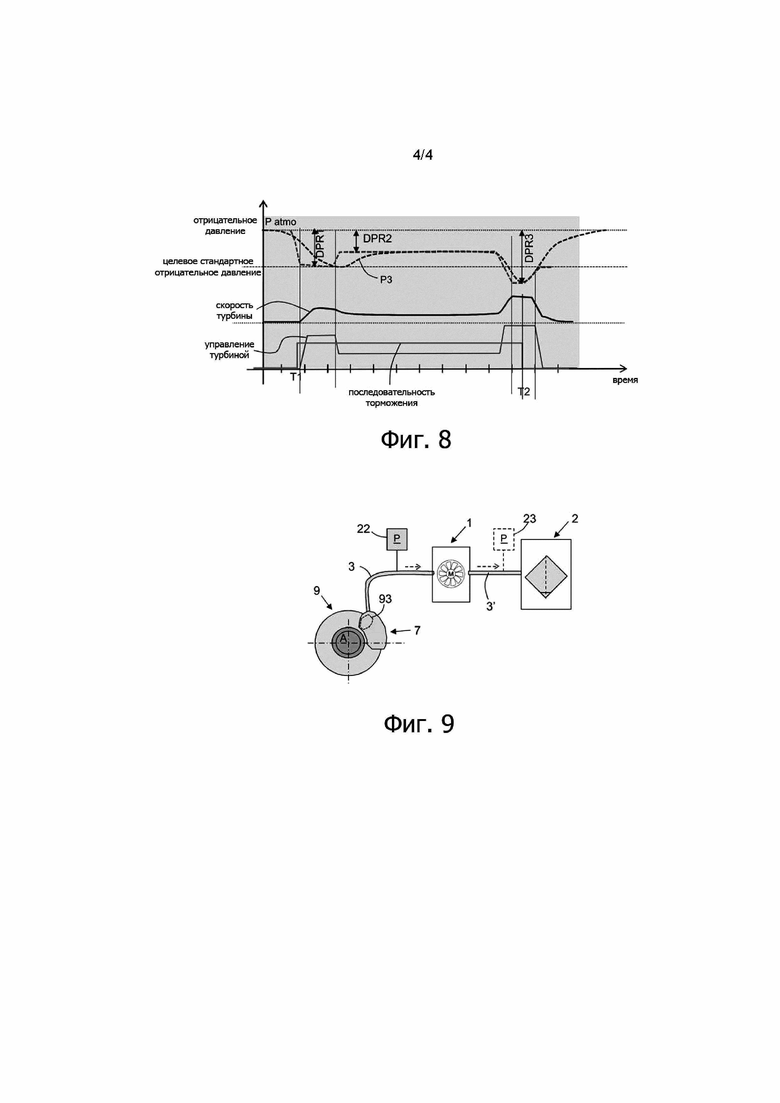
на фиг. 8 - временной график, показывающий вариант функционирования системы;
на фиг. 9 - вариант схемы системы всасывания тормозных частиц.
Осуществление изобретения
На различных чертежах одинаковые ссылочные позиции используются для обозначения одних и тех же элементов. С целью большей ясности некоторые элементы не представлены в масштабе.
На фиг. 1 схематично показан элемент фрикционного тормоза. В этом случае показан тормозной диск 9, предназначенный для вращения вместе с колесом (или осью подвижного состава). Диск 9 вращается вокруг оси А. В соответствии с предшествующим уровнем техники имеется суппорт 7, охватывающий диск и установленный на кронштейне суппорта. Кроме того, суппорт содержит поршень, выполненный с возможностью воздействия на фрикционные колодки для охватывания диска с двух сторон. Фрикционные колодки (не показаны) установлены на крепежных пластинах или опорных пластинах, причем все это само по себе известно и в этом документе подробно не описано.
Несмотря на то, что была представлена схема дискового тормоза, изобретение также пригодно для барабанного тормоза или даже для систем с тормозными колодками, воздействующими непосредственно на обод колеса.
В местоположении фрикционных колодок предусмотрено устройство 8 для захвата вылетающих частиц. Более конкретно, для каждой из фрикционных колодок может быть выполнен всасывающий патрубок 83. Пример можно найти, например, в документе FR3057040 заявителя, где частицы захватывают в пазах, выполненных во фрикционном материале. Всасывающий патрубок может быть выполнен посредством паза(пазов), который, в свою очередь, соединен со сквозным отверстием в опорной плите фрикционной накладки и сообщается с каналом, расположенным ниже по потоку (по направлению фильтра).
Всасывающий патрубок 83 соединен с источником отрицательного давления посредством пневматического контура. Пневматический контур может содержать первый канал 3 и второй канал 30.
В общем, всасывающий патрубок может быть расположен на пути частиц, когда они выходят от границы раздела между колодкой и вращающимся элементом (диском, барабаном, ободом и т.д.). Именно отрицательное давление или поток, создаваемый в этом месте, способствует хорошему захвату.
В других конфигурациях может быть предусмотрен кожух, и в этом случае всасывающий патрубок образован выходом из пространства, закрытого упомянутым кожухом.
Следовательно, необходимо понимать, что изобретение может быть применено независимо от конфигурации всасывающего патрубка 83.
Обычно для конфигурации с дисковым тормозом на каждой стороне диска имеется всасывающий патрубок 83, как показано на фиг. 1.
Всасывающий патрубок (или всасывающие патрубки, в зависимости от случая) соединен с фильтром 2 посредством канала текучей среды, который в этом документе обозначен первым каналом 3, как показано на фиг. 2. Первый канал 3 может быть выполнен в виде трубопровода без исключения прохода в виде туннеля через деталь (например, корпус суппорта). Первый канал может иметь большую или меньшую длину, причем эта длина может составлять от нескольких десятков сантиметров, например, 50 см, до нескольких метров в конфигурации централизованной фильтрации, как показано на фиг. 3.
В общем, соединение по текучей среде между всасывающим патрубком и фильтром 2 может содержать одно или несколько ответвлений, Т-образных соединений, Y-образных соединений и т.д. Термин «пневматический контур» также может быть использован для обозначения каналов для текучей среды/воздушного шланга.
Соединение по текучей среде между всасывающим патрубком и фильтром 2 может содержать жесткие части и гибкие шланговые части.
Между всасывающими патрубками, фильтром и источником отрицательного давления могут быть различные конфигурации: может быть один фильтр для каждого всасывающего патрубка (максимально децентрализованная конфигурация) или даже для каждой пары всасывающих патрубков (фиг. 2), но также возможно иметь единственный фильтр для множества пар всасывающих патрубков (фиг. 3) (так называемая централизованная конфигурация) или даже один фильтр для всего транспортного средства. Этот выбор может быть продиктован типом транспортного средства, сроком службы до засорения фильтра, различными ограничениями при установке в транспортном средстве и т.д.
На фиг. 2, 6 и 7 показана конфигурация с отрицательным давлением с фильтром, расположенным между первым каналом 3 и источником 1 отрицательного давления, который всасывает частицы через фильтр, в этом случае находящийся под отрицательным давлением относительно внешнего давления окружающей среды. Однако в конфигурации, показанной на фиг. 9, источник отрицательного давления (в данном случае турбина 1) может быть расположен между первым каналом 3 и фильтром, и в этом случае турбина всасывает частицы, а затем турбина вдувает их в фильтр через расположенный дальше по потоку канал, обозначенный позицией 3'. В этом случае фильтр 2 находится под положительным давлением, а не под отрицательным давлением.
В типовом варианте осуществления фильтр 2 может содержать фильтрующую среду из бумаги или какого-либо другого типа, позволяющую воздуху проходить и улавливать мелкие частицы, содержащиеся в потоке, выходящем из всасывающих патрубков.
Термин «фильтр» здесь следует понимать в широком смысле: этот термин содержит решения в виде центробежных фильтров (типа «циклон»), решения фильтрации методом электромагнитного улавливания и решения фильтрации с методом электростатического улавливания. Термин «фильтр» также включает в себя решение, в котором частицы направляют к уже имеющемуся фильтру, такому как воздушный фильтр салона, или к фильтру каталитического нейтрализатора.
Фильтр 2 для частиц выполнен с возможностью фильтрации воздуха, поступающего из всасывающих патрубков, который несет частицы микрометрических или миллиметровых размеров, другими словами, позволяя воздуху проходить через фильтрующую среду, в то время как частицы не проходят через фильтрующую среду и задерживаются на ней. Количество частиц, захваченных в фильтрующей среде, увеличивается с течением времени, поэтому фильтр 2 работает путем накопления, и прохождение воздуха через фильтрующую среду со временем становится более трудным.
В показанном примере источник 1 отрицательного давления образован турбиной 10 всасывания, приводимой в действие электрическим двигателем 11.
В показанном примере турбина с электродвигателем образует объект, отдельный от фильтра. В этих условиях предусмотрен второй пневматический канал 30 для соединения турбины с фильтром.
Следует отметить, что также возможна конфигурация с турбиной и фильтром, выполненными как единое целое.
В соответствии с предпочтительным вариантом осуществления изобретения, также предусмотрен датчик 22 давления, выполненный с возможностью измерения давления, преобладающего в первом канале 3.
Рассматриваемый датчик давления представляет собой одно из решений среди набора решений, которые позволяют определять свойства воздушного потока, преобладающие в первом канале. Таким образом, можно обобщить датчик давления до концепции устройства для определения условий воздушного потока, которое показывает, что решение с датчиками давления также охватывает датчик воздушного потока и датчик, измеряющий сопротивление вращению, наблюдаемое на роторе турбины.
На блок-схеме на фиг. 2 датчик 22 давления расположен на пути первого канала 3 между по меньшей мере одним всасывающим патрубком и фильтром 2.
Однако в альтернативной и столь же предпочтительной конфигурации датчик 22 давления расположен рядом с фильтром 2 или интегрирован с ним, как показано на фиг. 5.
Датчик давления может быть любого технологического типа: мембранный, капсульный, трубка Пито и т.д.
В соответствии с одним примером может быть выбран датчик MPX5700DP марки Freescale ™. В соответствии с одним примером может быть выбран пьезорезистивный датчик.
На практике датчик 22 давления измеряет разность давлений между давлением окружающей среды и давлением, преобладающим на соответствующем его входе.
Система всасывания также содержит блок 6 управления, выполненный с возможностью управления турбиной.
Блок 6 управления представляет собой электронный блок, способный генерировать управляющий сигнал для управления скоростью двигателя, который приводит в движение турбину, в соответствии с любым значением от нулевой скорости до максимально возможной.
В соответствии с одним примером электродвигатель питают от постоянного напряжения; может быть предусмотрено, чтобы управляющая логика использовала сигнал, модулированный с использованием ШИМ (широтно-импульсной модуляцией). Используемое постоянное напряжение может зависеть от области применения системы всасывания частиц, например, 12 вольт в обычных автотранспортных средствах, 24 вольта в тяжелых или промышленных транспортных средствах, таких как грузовики или автобусы, или даже 72 вольт в подвижном составе (трамвай, поезд).
Здесь следует отметить, что вместо всасывающей турбины источник отрицательного давления может быть источником отрицательного давления, уже имеющимся в транспортном средстве, в частности, для автомобильного сектора, источником отрицательного давления, индуцируемого работой двигателя транспортного средства, например, отводом от воздухозаборника, или в другом примере с использованием эффекта Вентури на потоке выходящего газа, например, выхлопного газа. В случае железнодорожного транспорта, источник отрицательного давления может быть получен от пневматической тормозной системы или от другой вспомогательной системы рассматриваемого железнодорожного транспортного средства.
Изобретатели обнаружили, что система может обеспечивать оптимальную работу, когда требуемое значение отрицательного давления преобладает внутри первого канала 3. Отсюда они определили интересующую операцию, которая заключается в получении заданного значения отрицательного давления в первом канале, другими словами, также в том месте, где датчик давления измеряет преобладающее в нем давление.
В соответствии с предпочтительной конфигурацией заданное значение отрицательного давления (DPR) выбирают в диапазоне от 20 до 40 миллибар ниже атмосферного давления. Другими словами, в шкале абсолютных давлений заданное значение абсолютного давления в первом канале может быть выражено как PC = Patmo - DPR, где Patmo - атмосферное давление, преобладающее вблизи системы всасывания.
Как указано выше, с датчиком 22 давления, измеряющим давление относительно давления окружающей среды, блок 6 управления управляет источником отрицательного давления, так что давление в первом канале достигает или стремится соответствовать заранее определенному заданному значению отрицательного давления, другими словами, так чтобы отрицательное давление в канале и во всасывающем патрубке было равным DPR. Здесь следует отметить, что заданное значение отрицательного давления может быть фиксированным заранее заданным значением, но, как будет показано ниже, заданное значение также может быть параметром калибровки, содержащим несколько целевых значений в зависимости от фазы последовательности торможения, или даже кривой зависимости от времени.
Как видно на фиг. 4, блок 6 управления принимает информацию, которая, помимо того, что поступает от датчика 22 давления, поступает от других элементов, имеющихся на борту транспортного средства, в частности, от тормозного привода, который управляет фрикционным торможением, упомянутым выше. Тормозной привод может представлять собой педаль или манипулятор в зависимости от рассматриваемого типа парка или транспортных средств (железнодорожный вагон и т.д.).
В некоторых конфигурациях имеется простой двухпозиционный переключатель, взаимодействующий с педалью 68 тормоза. Этот переключатель может передавать информацию 67 непосредственно в блок 6 управления всасывающей системы или через блок 63 управления функцией торможения, например, блок, который управляет функцией ABS. В соответствии с другой конфигурацией, может быть предусмотрен больший объем информации, аналоговой или цифровой, точно отражающей текущее положение педали тормоза, что позволяет блоку 6 управления знать интенсивность торможения, а также иметь возможность действовать очень быстро после начала воздействия пользователем или водителем на педаль тормоза. В этом случае предусмотрен аналоговый или цифровой потенциометр 69, который выдает подробную информацию 66, предназначенную для блока 6 управления системой всасывания.
С помощью трех частей временного графика на фиг. 6 показано три различных состояния/уровня засорения фильтра.
Кривая в верхней части относится к давлению, обозначенному позицией P3 и преобладающему внутри первого канала 3, другими словами, по существу, давление всасывания, приложенное к всасывающему патрубку 83.
Кривая в нижней части графика относится к управлению двигателем 11 турбины, например, характеризует его средний управляющий ток.
Кривая, расположенная в средней части, относится к скорости вращения турбины.
T1 обозначает начало последовательности торможения, а через T2 обозначает конец последовательности торможения.
Видно, что когда фильтр новый, на левом временном графике «A», целевое давление (т.е. Patmo - DPR) достигают при низкой скорости вращения турбины и столь же низком управляющем токе.
Для сравнения, на среднем временном графике «B», где использование фильтра уже было значительным, для достижения того же целевого давления (например, Patmo - DPR) частота вращения турбины выше, и управляющий ток также выше.
Для сравнения, на левом временном графике «C» фильтр имеет довольно высокий уровень засорения, и для достижения того же целевого давления (например, Patmo - DPR) частота вращения турбины еще выше, и управляющий ток еще выше.
Более конкретно, блок 6 управления содержит контур автоматизации (управление с обратной связью), который, как только появляются условия для включения всасывания, стремится как можно скорее достичь в первом канале целевого давления Patmo - DPR.
Другими словами, блок управления реализует способ, содержащий по меньшей мере следующие действия:
- управление вращением турбины в соответствии с заданными условиями активации (например, информацией от педали тормоза),
- измерение давления в первом канале 3 датчиком давления 22,
- определение разницы между текущим давлением и заданным значением DPR отрицательного давления,
- регулирование управляющих сигналов, используемых для настройки скорости вращения турбины в зависимости от указанной разности.
В зависимости от скорости вращения, полученной контуром обратной связи, блок управления оценивает уровень засорения фильтра; фактически, чем выше скорость вращения, полученная при управлении с обратной связью, тем сильнее засорен фильтр. Для этого блок управления может включать в себя кривую преобразования или даже номограмму.
Таким образом, на практике наблюдается постепенное увеличение скорости турбины, достигаемое регулированием или управлением с обратной связью, как показано на фиг. 7.
Блок управления выполнен с возможностью обнаружения заранее заданного уровня засорения фильтра, что на практике соответствует неизбежной необходимости замены фильтра. Это показано на фиг. 7, где предупреждение о засорении определяют, когда скорость турбины достигает максимально допустимой скорости для двигателя турбины, или иначе заданное значение DPR отрицательного давления не может быть достигнуто даже с командой на максимальную мощность.
В соответствии с одним вариантом выполнения, при таком условии блок управления выполнен с возможностью передачи сообщения пользователю.
Чтобы проиллюстрировать порядки величины, мощность, потребляемая турбиной 10 и ее электродвигателем 11, может варьироваться от примерно тридцати ватт до более одного киловатта; на практике эта мощность может находиться в диапазоне [30–800 Вт] в зависимости от количества обслуживаемых всасывающих патрубков, а также в зависимости от длины трубопровода, которых создает небольшой перепад давления.
В одной из конфигураций частота вращения турбины может составлять от 0 до 12000 об/мин.
В одной из конфигураций частота вращения турбины может составлять от 0 до 30 000 об/мин.
Время реакции турбины для перехода от нуля к заданной скорости обычно может составлять от 100 мс до 700 мс, чаще всего от 400 мс до 600 мс для автомобильных устройств.
На фиг. 3 показан централизованный фильтр, централизованный датчик давления и трубы или шланги 31, 32, 33, 34, которые позволяют подсоединять каждый из всасывающих патрубков 83 к фильтру 2.
Отметим, что одна турбина может обслуживать несколько фильтров.
На фиг. 9 турбина 1 расположена между первым каналом 3 и фильтром. Турбина всасывает частицы, затем турбина вдувает их в фильтр через расположенный ниже по потоку канал, обозначенный позицией 3'. В этом случае фильтр 2 находится под положительным давлением, а не под отрицательным давлением.
Управляющая логика может использовать датчик 22, измеряющий отрицательное давление в первом канале, и/или вспомогательный датчик 23, измеряющий положительное давление в расположенном ниже по потоку канале 3'. Заданное значение управления с обратной связью может относиться к одному или другому датчикам или даже их комбинации.
Как показано на фиг. 8, в варианте предусмотрено, что заданное значение управления с обратной связью является не заранее определенным фиксированным значением, а несколькими заданными значениями, которые зависят от текущей фазы последовательности торможения.
Кривая, обозначенная позицией P3, относится к давлению, преобладающему внутри первого канала 3, другими словами, по существу, давлению всасывания, приложенному к всасывающему патрубку 83. Позицией T1 обозначено начало последовательности торможения, а позицией T2 обозначен конец последовательности торможения.
Таким образом, можно обеспечить три заданных значения отрицательного давления, стандартное заданное значение, обозначенное DPR1, сниженное заданное значение отрицательного давления, обозначенное DPR2, и повышенное заданное значение отрицательного давления, обозначенное DPR3.
Повышенное заданное значение отрицательного давления DPR3 выбирают, например, в начале торможения и в конце последовательности торможения. Пониженное заданное значение отрицательного давления DPR2 выбирают, например, в середине последовательности торможения.
В соответствии с примером, показанным на фиг. 8, в начале торможения применяют первое стандартное отрицательное давление, обозначенное через DPR1, во время промежуточной фазы торможения применяют пониженное заданное значение отрицательного давления DPR2, а в конце фазы торможения применяют повышенное заданное значение отрицательного давления DPR3. Согласно одному из вариантов выполнения, временно увеличенное заданное значение отрицательного давления применяют после отпускания фрикционного тормоза в фазе, называемой фазой продолжения, которая служит для очистки всасывающего патрубка, а также первого канала от находящихся в нем частиц.
Изобретение относится к фрикционным тормозам. Система всасывания тормозных частиц от системы фрикционного торможения содержит источник отрицательного давления, всасывающий патрубок, соединенный пневматическим контуром с источником отрицательного давления, и блок управления, управляющий источником отрицательного давления. Дополнительно имеется устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре. Блок управления способен управлять источником отрицательного давления так, чтобы текущие параметры воздушного потока в пневматическом контуре достигали или стремились к одному заданному значению для параметров воздушного потока. Улучшается фильтрация. 2 н. и 12 з.п. ф-лы, 9 ил. 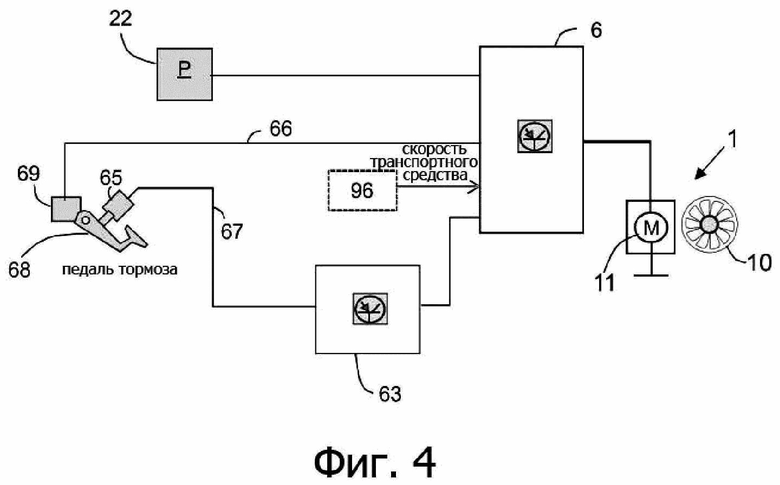
1. Система всасывания тормозных частиц от системы фрикционного торможения, содержащая:
по меньшей мере один источник (1) отрицательного давления, по меньшей мере один всасывающий патрубок (83), соединенный пневматическим контуром с источником отрицательного давления, и блок (6) управления, выполненный с возможностью управления источником отрицательного давления,
отличающаяся тем, что система всасывания дополнительно содержит устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, при этом блок управления способен управлять источником отрицательного давления так, чтобы текущие параметры воздушного потока в пневматическом контуре достигали или стремились к одному заданному значению для параметров воздушного потока.
2. Система по п. 1, в которой устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, представляет собой датчик (22) давления для измерения давления, преобладающего в пневматическом контуре, и давления, отражающего текущие параметры воздушного потока, при этом блок управления способен управлять источником отрицательного давления так, чтобы давление в пневматическом контуре достигало или стремилось к предварительно заданному значению отрицательного давления (DPR).
3. Система по любому из пп. 1 или 2, отличающаяся тем, что источник отрицательного давления образован турбиной, приводимой в действие электрическим двигателем (11).
4. Система по любому из пп. 1-3, дополнительно содержащая по меньшей мере один фильтр (2) для сбора всасываемых частиц.
5. Система по п. 2, отличающаяся тем, что источник отрицательного давления образован турбиной, приводимой в действие электрическим двигателем (11), при этом датчик давления расположен возле фильтра или интегрирован в него.
6. Система по любому из пп. 1-4, отличающаяся тем, что содержит централизованный фильтр и турбину, соединенные с четырьмя или более всасывающими патрубками.
7. Система по любому из пп. 1-4, отличающаяся тем, что система содержит децентрализованный фильтр и турбину, а именно, для каждого всасывающего патрубка или пары всасывающих патрубков.
8. Система по любому из пп. 1-7, отличающаяся тем, что блок управления выполнен с возможностью обнаружения предварительно заданного уровня загрязнения фильтра и передачи сообщения пользователю.
9. Система по любому из пп. 1-8, отличающаяся тем, что заданное значение отрицательного давления (DPR) установлено в диапазоне от 20 до 40 миллибар ниже атмосферного давления.
10. Способ управления системой всасывания частиц от фрикционного торможения системы торможения транспортного средства, причем система всасывания содержит:
по меньшей мере один источник отрицательного давления, например турбину или другой источник; по меньшей мере один всасывающий патрубок (83), соединенный пневматическим контуром с источником отрицательного давления; блок (6) управления и устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, при этом блок управления выполнен с возможностью:
a) управления источником отрицательного давления, например скоростью вращения турбины, в соответствии с предварительно заданными параметрами активации,
b) измерения текущих параметров воздушного потока, преобладающих в пневматическом контуре,
c) определения разницы между текущими параметрами воздушного потока и по меньшей мере одним заданным значением для параметров воздушного потока,
d) регулирования используемых сигналов управления для настраивания мощности источника давления или вращения турбины в зависимости от указанной разницы.
11. Способ по п. 10, в котором устройство определения текущих параметров воздушного потока, преобладающих в пневматическом контуре, представляет собой датчик (22) давления для измерения давления, преобладающего в пневматическом контуре, при этом давление затем отражает текущие параметры воздушного потока, а указанные этапы b) и c) становятся следующими этапами, включающими в себя:
b) измерение давления в пневматическом контуре посредством датчика давления,
c) определение разницы между текущим давлением и заданным значением отрицательного давления.
12. Способ по любому из пп. 10-11, в котором блок управления дополнительно выполнен с возможностью обнаружения предварительно заданного уровня загрязнения фильтра, в частности, когда контрольное заданное значение для источника отрицательного давления превосходит предварительно заданный порог, так что текущие параметры воздушного потока достигают предварительного заданного значения для параметров воздушного потока.
13. Способ по любому из пп. 10-12, в котором блок управления дополнительно выполнен с возможностью передачи сообщения пользователю, когда определено состояние загрязнения.
14. Способ по любому из пп. 10-12, в котором источником отрицательного давления является турбина, при этом уровень шума, испускаемого вращением турбины, превышает определенный звуковой порог и может быть воспринят пользователем, когда управляющие сигналы, используемые для вращения турбины, превышают заданное значение.
| DE 4240873 A1, 09.06.1994 | |||
| US 2017248180 A1, 31.08.2017 | |||
| DE 102011111594 A1, 28.02.2013. |

