Данное изобретение относится к системе улавливания тормозных частиц из фрикционной тормозной системы, которая содержит источник разрежения, пневматический контур, соединяющий фрикционную тормозную систему с источником разрежения, и фильтр, находящийся на пневматическом контуре и установленный на опоре.
Такими фрикционными тормозными системами могут быть оснащены дорожные или рельсовые транспортные средства. Такими фрикционными тормозными системами могут быть также оснащены стационарные роторные устройства, такие как ветроустановки, или промышленные установки.
В таких системах имеется источник разрежения (например, вращаемая двигателем всасывающая турбина), соединенный через пневматический контур с фрикционной тормозной системой, и фильтр для сбора частиц, выделяемых тормозной системой. Этот фильтр установлен перед источником разрежения и препятствует прохождению частиц через источник разрежения и их распространению в атмосферу. Однако в некоторых ситуациях этот фильтр может отсутствовать, например, поскольку он не был заменен во время техобслуживания транспортного средства. Отсутствие фильтра приводит к отрицательным последствиям, так как частицы проходят в источник разрежения и высвобождаются в атмосферу. При этом перестает обеспечиваться функция фильтрации.
Описание сущности изобретения
Задача изобретения состоит в устранении вышеуказанных недостатков.
Изобретение призвано предложить систему улавливания тормозных частиц, которая позволяет информировать пользователя транспортного средства об отсутствии фильтра системы улавливания, чтобы пользователь мог действовать соответствующим образом и, в частности, установить фильтр в системе.
Вышеуказанная задача решена за счет того, что система улавливания содержит блок управления и устройство обнаружения фильтра, выполненное с возможностью передавать по меньшей мере один сигнал в блок управления, при этом блок управления выполнен с возможностью определить на основании этого сигнала отсутствие фильтра на пневматическом контуре и информировать пользователя об этом отсутствии фильтра.
Благодаря этим признакам, обнаруживают и определяют отсутствие фильтра на пневматическом контуре, и пользователь сразу получает информацию об этом через блок управления. Следует отметить, что блок управления может определять как отсутствие фильтра на его опоре, так и отсутствие опоры (с ее фильтром) на контуре. Действительно, в некоторых случаях более практично заменять узел, состоящий из опоры и фильтра. Пользователь может при этом действовать соответствующим образом и установить фильтр на его опоре или установить опору (с ее фильтром) на контуре, чтобы препятствовать распространению вредных частиц в атмосферу.
Предпочтительно устройство обнаружения содержит датчик давления, который находится на пневматическом контуре перед фильтром, при этом датчик давления выполнен с возможностью передавать в сигнале в блок управления измерение давления Р1 в пневматическом контуре перед фильтром, при этом блок управления выполнен с возможностью сравнивать по получении этого сигнала измеренное давление Р1 с контрольным давлением PR, которое является давлением в пневматическом контуре в отсутствие фильтра при контрольном рабочем состоянии ER источника разрежения во время измерения давления Р1 датчиком давления, при этом блок управления выполнен с возможностью информировать пользователя об отсутствии фильтра на пневматическом контуре, когда измеренное давление Р1 по существу равно контрольному давлению PR или по существу равно атмосферному давлению.
Таким образом, в случае, когда контур или опора фильтра уже имеет датчик давления, нет необходимости в установке дополнительного устройства обнаружения.
Предпочтительно устройство обнаружения содержит первый датчик давления, который находится на пневматическом контуре перед фильтром, при этом датчик давления выполнен с возможностью передавать в сигнале в блок управления измерение первого давления Р1 в пневматическом контуре перед фильтром, и второй датчик давления, который находится на пневматическом контуре за фильтром и который выполнен с возможностью передавать в сигнале в блок управления измерение второго давления Р2 в пневматическом контуре за фильтром, при этом блок управления выполнен с возможностью сравнивать по получении по меньшей мере одного сигнала первое измеренное давление Р1 и второе измеренное давление Р2, при этом блок управления выполнен с возможностью информировать пользователя об отсутствии фильтра на пневматическом контуре, когда первое измеренное давление Р1 и второе измеренное давление Р2 по существу равны или когда первое измеренное давление Р1 по существу равно атмосферному давлению.
Таким образом, в случае, когда контур или опора фильтра уже имеет два датчика давления, нет необходимости в установке дополнительного устройства обнаружения.
Предпочтительно устройство обнаружения содержит контактный детектор, выполненный с возможностью обнаруживать контакт между фильтром и опорой, при этом контактный детектор выполнен с возможностью передавать сигнал в блок управления, когда нет контакта между фильтром и опорой, при этом блок управления выполнен с возможностью, при получении сигнала, информировать пользователя об отсутствии фильтра.
Таким образом, повышается надежность обнаружения фильтра.
Предпочтительно устройство обнаружения содержит контактный детектор, выполненный с возможностью обнаруживать контакт между опорой и контуром, при этом контактный детектор выполнен с возможностью передавать сигнал в блок управления, когда нет контакта между опорой и контуром, при этом блок управления выполнен с возможностью, при получении сигнала, информировать пользователя об отсутствии фильтра.
Таким образом, повышается надежность обнаружения фильтра.
Предпочтительно устройство обнаружения содержит идентификатор, который находится на фильтре или на опоре, и бесконтактный детектор, закрепленный вблизи опоры и выполненный с возможностью обнаруживать присутствие идентификатора, при этом бесконтактный детектор выполнен с возможностью передавать сигнал в блок управления, когда идентификатор не обнаружен бесконтактным детектором, при этом блок управления выполнен с возможностью, при получении сигнала, информировать пользователя об отсутствии фильтра.
Таким образом, нет необходимости добиваться исключительно точного позиционирования фильтра на его опоре и достаточно, чтобы фильтр был установлен на опоре.
Например, идентификатор расположен на опоре, а бесконтактный детектор закреплен на контуре.
Например, идентификатор расположен на фильтре, а бесконтактный детектор закреплен на опоре.
Объектом изобретения является также способ обнаружения отсутствия фильтра в системе улавливания тормозных частиц из фрикционной тормозной системы, причем эта система улавливания содержит источник разрежения, пневматический контур, соединяющий фрикционную тормозную систему с источником разрежения, фильтр, находящийся на пневматическом контуре и установленный на опоре.
Согласно изобретению, способ содержит следующие этапы:
(а) Обеспечивают наличие блока управления и устройства обнаружения фильтра, которые входят в состав системы улавливания;
(b) Устройство обнаружения передает по меньшей мере один сигнал в блок управления;
(с) Блок управления определяет на основании сигнала отсутствие фильтра на пневматическом контуре и информирует пользователя об этом отсутствии фильтра.
Изобретение и его преимущества будут более очевидны из нижеследующего подробного описания вариантов осуществления, представленных в качестве неограничивающих примеров. Описание ссылается на прилагаемые чертежи, на которых:
на фиг. 1 схематично показана заявленная система улавливания;
на фиг. 2 показаны корпус с фильтром и устройство обнаружения этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе;
на фиг. 3 показаны корпус с фильтром и версия варианта выполнения устройства обнаружения этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе;
на фиг. 4 показаны корпус с фильтром и второй вариант устройства обнаружения этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе;
на фиг. 5 показаны корпус с фильтром и версия второго варианта устройства обнаружения этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе;
на фиг. 6 показан корпус с фильтром и третий вариант устройства обнаружения этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе;
на фиг. 7 показаны корпус с фильтром и версия третьего варианта устройства обнаружения этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе.
Осуществление изобретения
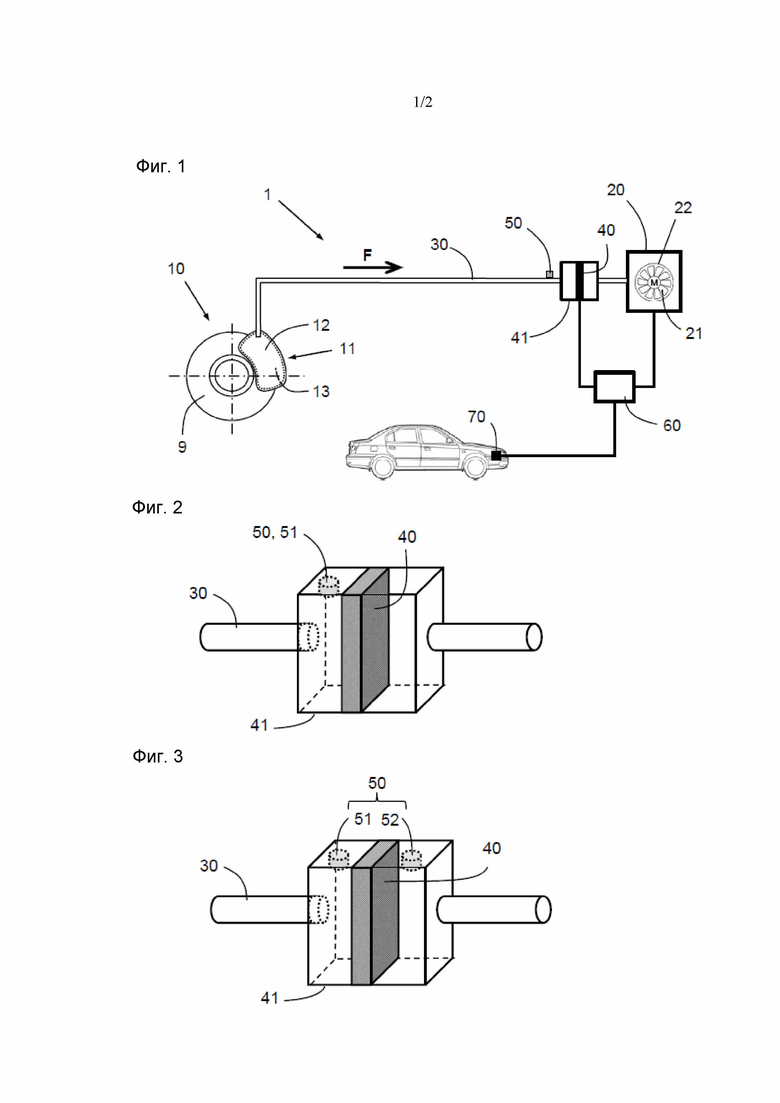
На фиг. 1 схематично показана заявленная система 1 улавливания частиц, выделяемых фрикционной тормозной системой 10.
Эта фрикционная тормозная система 10 содержит тормозную колодку 11 для торможения транспортного средства. Эта колодка 11 содержит основу 12 и накладку 13, выполненную из фрикционного материала и закрепленную на основе 12. На фиг. 1 колодка 11 показана снизу, при этом на первом плане показана основа 12.
Колодка 11 (первая колодка) находится напротив диска 9, который приводится во вращение колесом транспортного средства. Вторая идентичная колодка (не видна) находится с другой стороны диска 9 и напротив первой колодки 11 таким образом, что эти две колодки охватывают между собой диск 9. Торможение диска 9 происходит за счет трения двух накладок 13 по диску 9, когда эти две колодки приближаются к диску 9.
Система 1 улавливания содержит пневматический контур 30 и источник 20 разрежения. Колодка 11 и вторая колодка связаны с источником 20 разрежения через этот пневматический контур 30. Например, источник 20 разрежения содержит электрический двигатель 21 и всасывающую турбину 22, приводимую во вращение этим электрическим двигателем 21.
Во время работы источник 20 разрежения может всасывать частицы сразу при их выделении накладками 13 и через пневматический контур 30. Направление прохождения воздуха и частиц во время нормальной работы показано на фиг. 1 стрелкой F. Таким образом, стрелка F показывает прохождение от входа к выходу. Система 1 улавливания дополнительно содержит фильтр 40, который находится на контуре 30, то есть через него проходит воздух, циркулирующий в контуре 30. Этот фильтр 40 установлен на опоре 41, закрепленной на контуре 30. Например, опора 41 представляет собой корпус, в котором расположен фильтр 40, как показано на фигурах. Таким образом, фильтр 40 делит корпус 41 на верхнюю по потоку часть и на нижнюю по потоку часть. Воздух, поступающий из верхней по потоку части контура 30, заходит в корпус 41 через входной патрубок корпуса 41, проходит через фильтр 40 и выходит из корпуса 41 через выходной патрубок корпуса 41, после чего заходит в нижнюю по потоку часть контура 30.
Система 1 улавливания дополнительно содержит блок 60 управления и устройство 50 обнаружения фильтра 40. Этот блок 60 управления и это устройство 50 обнаружения служат для определения отсутствия фильтра 40 на его опоре 41 или отсутствия опоры 41 на контуре 30 (и, следовательно, отсутствия фильтра 40). Блок 60 управления принимает сигналы от устройства 50 обнаружения (которое содержит элемент для генерирования и передачи этих сигналов), а также выполнен с возможностью управлять источником 20 разрежения и принимать от него информацию. Эти взаимодействия между блоком 60 управления, устройством 50 обнаружения и источником 20 разрежения схематично показаны на фиг. 1 жирными линиями. Эти взаимодействия могут быть реализованы через электрические линии. Работа этого блока 60 управления и этого устройства 50 обнаружения описана ниже.
Во время работы системы 1 улавливания устройство 50 обнаружения передает по меньшей мере один сигнал в блок 60 управления. Под выражением «по меньшей мере один сигнал» следует понимать либо непрерывный сигнал, либо сигнал через равномерные промежутки времени, либо точечный сигнал, если изначально обнаруживается отсутствие фильтра 40 на его опоре 41. На основании этого сигнала блок 60 управления обнаруживает отсутствие фильтра 40, затем информирует пользователя об отсутствии фильтра 40. Эта информация может предоставляться при помощи любого средства, например, посредством отображения на приборной панели транспортного средства текста, такого как «Отсутствует фильтр», или значка, или светового индикатора, и/или, например, посредством воздействия на пользователя вибрациями при помощи вибрационной системы, находящейся под сидением и управляемой блоком 60 управления.
Дополнительно эта информация может сопровождаться ограничением скорости транспортного средства при помощи ограничителя 70, управляемого блоком 60 управления (фиг. 1). Как следствие, уменьшается выделение частиц во время торможений транспортного средства, а также уменьшается распространение этих вредных частиц в источнике 20 разрежения.
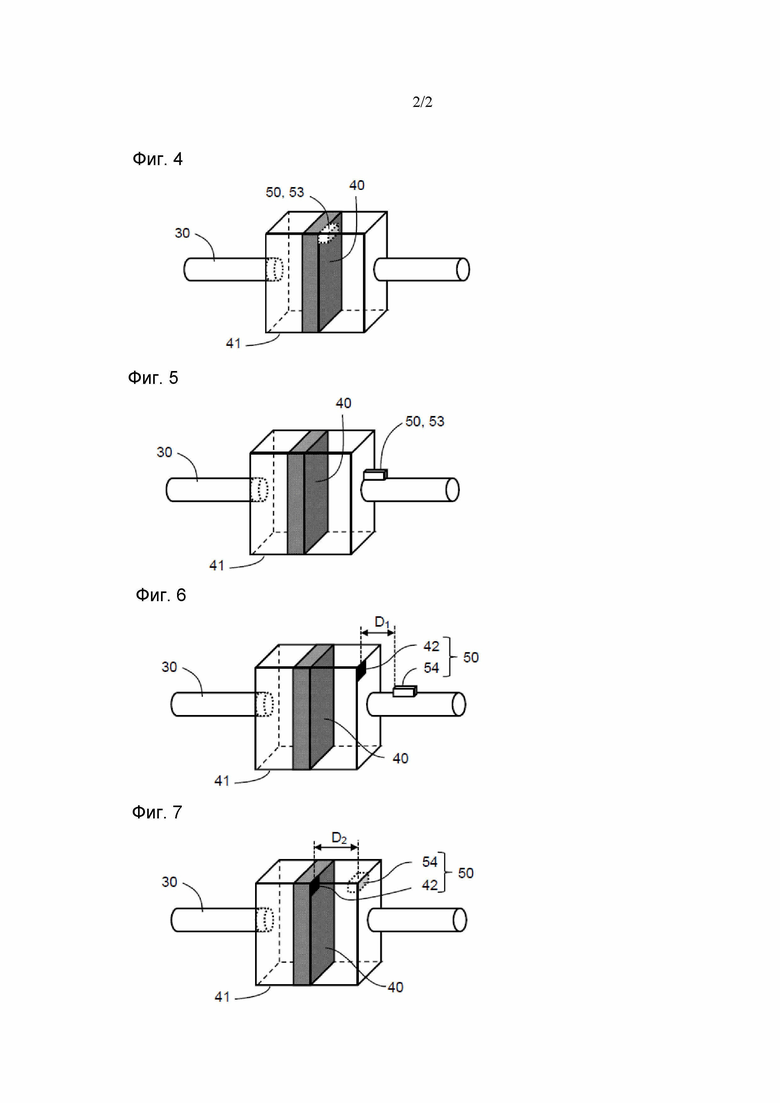
Далее со ссылками на фиг. 2 следует описание первого варианта выполнения устройства 50 обнаружения фильтра 40. На фиг. 2 представлен более детальный вид опоры 41, фильтра 40 и устройства 50 обнаружения.
Устройство 50 обнаружения содержит (первый) датчик 51 давления, который находится на пневматическом контуре 30 перед фильтром 40. В идеале датчик 51 давления находится достаточно близко к фильтру 40, чтобы давление, измеряемое датчиком 51 давления, было идентичным с давлением в месте, где находится фильтр 40 или где он должен находиться, если он присутствует. Таким образом, датчик 51 давления находится либо на пневматическом контуре 30 вблизи опоры 41 фильтра 40 (что позволяет определить отсутствие опоры 41), либо в опоре 41 фильтра, как показано на фиг. 2. Выражение «находится в опоре 41» означает, что датчик давления находится на опоре или в опоре, если опора является корпусом, и во всех случаях датчик измеряет давление в месте этой опоры 41.
Датчик 51 давления выполнен с возможностью измерять (первое) давление Р1 в пневматическом контуре 30 перед фильтром 40, и устройство 50 обнаружения выполнено с возможностью передавать в блок 60 управления результат этого измерения в сигнале. Во время этого измерения источник 20 разрежения работает в рабочем состоянии, называемом контрольным рабочим состоянием ЕR. Это рабочее состояние характеризуется параметром, которым является, например, скорость V вращения всасывающей турбины 22. Так, в контрольном рабочем состоянии ER всасывающая турбина 22 вращается со скоростью VR вращения. Блок 60 управления содержит в памяти контрольное давление PR, являющееся давлением, которое создается в пневматическом контуре 30 в отсутствие фильтра 40 при контрольном рабочем состоянии ЕR источника 20 разрежения. Понятно, что это контрольное давление PR меняется в зависимости от этого контрольного рабочего состояния ЕR. Так, контрольное давление PR меняется в зависимости от скорости VR вращения турбины 22. При получении сигнала, содержащего это давление Р1, измеренное в пневматическом контуре 30, блок 60 управления сравнивает это измеренное давление Р1 с контрольным давлением PR. Это контрольное давление PR соответствует давлению в пневматическом контуре 30 в отсутствие фильтра 40 при контрольном рабочем состоянии ЕR источника 20 разрежения, и измерение первого давления Р1 датчиком 51 давления происходит при этом контрольном рабочем состоянии ЕR. Следовательно, если первое давление Р1 по существу равно контрольному давлению PR, это значит, что фильтр 40 отсутствует на своей опоре 41 (или что фильтр 40 порвался) или что опора 41 (и, следовательно, фильтр 40) отсутствует, при этом верхняя по потоку часть контура 30 и нижняя по потоку часть контура 30 соединены в месте, где должна была находиться опора 41. Действительно, можно отметить, что, если фильтр 40 присутствует, то давление перед фильтром 40 превышает контрольное давление PR, так как фильтр 40 даже в незабитом состоянии мешает прохождению воздуха. Таким образом, в ситуации, когда Р1 по существу равно PR, блок 60 управления информирует пользователя об отсутствии фильтра 40. Под выражением «по существу равно» следует понимать, что давление находится в небольшом интервале вблизи контрольного давления. Например, этот интервал равен +/- 1%, или +/- 2%, или +/- 5%, или +/- 10% от значения контрольного давления.
В конкретной ситуации, когда при контрольном рабочем состоянии ER опора 41 отсутствует и когда верхняя по потоку часть контура 30 и нижняя по потоку часть контура 30 не соединены, измеренное давление Р1 по существу равно атмосферному давлению. В этом случае блок 60 управления тоже информирует пользователя об отсутствии фильтра 40.
Далее следует описание версии первого варианта осуществления, в которой, кроме первого датчика 51 давления, устройство 50 обнаружения содержит второй датчик 52 давления. Эта версия представлена на фиг. 3. Первый датчик 51 давления находится перед фильтром 40 на контуре 30. Второй датчик 52 давления находится за фильтром 40 на контуре 30. Конфигурация, когда первый датчик 51 находится перед опорой 41 и когда второй датчик 52 находится за опорой 41, позволяет определить отсутствие опоры 41. Например, первый датчик 51 и второй датчик 52 находятся в опоре 41, как показано на фиг. 3. Первый датчик 51 давления выполнен с возможностью измерять первое давление Р1 в пневматическом контуре 30 перед фильтром 40, и устройство 50 обнаружения выполнено с возможностью направлять в блок 60 управления это измерение в сигнале. Параллельно, например, одновременно, второй датчик 52 давления может измерить второе давление Р2 в пневматическом контуре 30 за фильтром 40, и устройство 50 обнаружения выполнено с возможностью направлять в блок 60 управления это измерение в сигнале. Например, измерение первого давления Р1 и измерение второго давления Р2 передаются в одном и том же сигнале. При получении этого сигнала или этих сигналов блок 60 управления может сравнить первое давление Р1 со вторым давлением Р2. Если первое давление Р1 по существу равно второму давлению Р2, это значит, что фильтр 40 отсутствует на его опоре 41 (или что фильтр 40 порвался) или что опора 41 (и, следовательно, фильтр 40) отсутствует, при этом верхняя по потоку часть контура 30 и нижняя по потоку часть контура 30 соединены в месте, где должна была находиться опора 41. Действительно, отмечается, что, если фильтр 40 присутствует, то давление перед фильтром 40 превышает давление за фильтром 40. Таким образом, в ситуации, когда Р1 по существу равно Р2, блок 60 управления информирует пользователя об отсутствии фильтра 40.
В конкретной ситуации, когда во время работы системы улавливания опора 41 отсутствует и когда верхняя по потоку часть контура 30 и нижняя по потоку часть контура 30 не соединены, измеренное давление Р1 по существу равно атмосферному давлению. В этом случае блок 60 управления тоже информирует пользователя об отсутствии фильтра 40.
Далее со ссылками на фиг. 4 и 5 следует описания второго варианта выполнения устройства 50 обнаружения фильтра 40.
Устройство 50 обнаружения содержит контактный детектор 53. В первой версии, показанной на фиг. 4, этот контактный детектор 53 установлен на опоре 41 таким образом, что, когда фильтр 40 помещен в опору 41 (или на опору), фильтр 40 входит в физический контакт с контактным детектором 53. Этот физический контакт происходит, например, за счет соприкосновения между фильтром 40 и элементом, входящим в состав контактного детектора 53. Например, этим элементом является убирающийся контактор с возвратом (пружиной), при движении убирания которого возникает сигнал. В альтернативном варианте этот физический контакт происходит, например, при взаимодействии между охватываемым элементом, установленным на контактном детекторе 53 (соответственно на фильтре 40), и охватывающим элементом, установленным на фильтре 40 (соответственно на контактном детекторе 53). Таким образом, контактный детектор 53 может обнаруживать контакт между фильтром 40 и опорой 41 и, следовательно, присутствие фильтра в (или на) опоре 41. Если между фильтром 40 и опорой 41 нет контакта, то есть фильтр 40 отсутствует на опоре 41, устройство 50 обнаружения передает сигнал в блок 60 управления. Например, этот сигнал передается через равномерные промежутки, пока фильтр 40 отсутствует на опоре 41. При получении этого сигнала блок 60 управления информирует пользователя об отсутствии фильтра 40.
Во второй версии, показанной на фиг. 5, контактный детектор 53 установлен на контуре 30 перед или за опорой 41 таким образом, что, когда опора 41 находится на контуре 30, опора 41 входит в физический контакт с контактным детектором 53. Этот физический контакт происходит, например, за счет соприкосновения между опорой 41 и элементом, входящим в состав контактного детектора 53. В альтернативном варианте этот физический контакт происходит, например, при взаимодействии между охватываемым элементом, установленным на контактном детекторе 53 (соответственно на опоре 41), и охватывающий элементом, установленным на опоре 41 (соответственно на контактном детекторе 53). Если между опорой 41 и контуром 30 нет контакта, то есть опора 41 не установлена на контуре 30 (и, следовательно, фильтр 40 отсутствует), устройство 50 обнаружения передает сигнал в блок 60 управления. Например, этот сигнал передается через равномерные промежутки, пока опора 41 отсутствует на контуре 30. При получении этого сигнала блок 60 управления информирует пользователя об отсутствии фильтра 40.
Далее со ссылками на фиг. 6 и 7 следует описание третьего варианта выполнения устройства 50 обнаружения фильтра 40.
Устройство 50 обнаружения содержит бесконтактный детектор 54 и идентификатор (мишень) 42, находящийся на фильтре 40 или на опоре 41. Бесконтактный детектор 54 выполнен с возможностью обнаруживать идентификатор 42 в определенном объеме V0 вокруг этого детектора 54. Это обнаружение осуществляют, например, с применением технологии RFID. Технология RFID объединяет технологии, при которых идентификатор получает питание дистанционно от детектора. Бесконтактный детектор 54 закреплен вблизи фильтра 40, то есть идентификатор 42 (который расположен либо на фильтре 40, либо на опоре 41) находится в объеме V0 вокруг бесконтактного детектора 54.
В первой версии, показанной на фиг. 6, бесконтактный детектор 54 закреплен на контуре 30 перед или за опорой 41, и идентификатор 42 находится на опоре 41. Таким образом, бесконтактный детектор 54 находится на расстоянии D1 от идентификатора 42, когда опора 41 установлена на контуре 30, и бесконтактный детектор 54 калиброван таким образом, чтобы, если расстояние между ним и идентификатором 42 превышает расстояние D1, то есть если опора 41 (и, следовательно, фильтр 40) отсутствует на контуре 30, идентификатор 42 не обнаруживался. В этом случае устройство 50 обнаружения передает сигнал в блок 60 управления. Например, этот сигнал передается через равномерные промежутки, пока опора 41 отсутствует на контуре 30. При получении этого сигнала блок 60 управления информирует пользователя об отсутствии фильтра 40. В этой версии идентификатор 42 может находиться на фильтре 40, поскольку бесконтактный детектор 54 находится при этом на расстоянии D1 от идентификатора 42.
Во второй версии, показанной на фиг. 7, бесконтактный детектор 54 закреплен на опоре 41 (например, он находится в корпусе, когда опора 41 представляет собой корпус), а идентификатор 42 находится на фильтре 40, при этом бесконтактный детектор 54 находится на расстоянии D2 от идентификатора 42, когда фильтр 40 установлен на опоре 41. Бесконтактный детектор 54 калиброван таким образом, чтобы, если расстояние между ним и идентификатором 42 превышает расстояние D2, то есть если фильтр 40 отсутствует на опоре 41, идентификатор 42 не обнаруживался. В этом случае устройство 50 обнаружения передает сигнал в блок 60 управления. Например, этот сигнал передается через равномерные промежутки, пока фильтр 40 отсутствует на опоре 41. При получении этого сигнала блок 60 управления информирует пользователя об отсутствии фильтра 40.
Различные описанные выше варианты выполнения могут применяться отдельно или в комбинации по два варианта или более.
В некоторых вариантах выполнения, в частности, в описанном выше третьем варианте, при охватываемом-охватывающем взаимодействии между фильтром 40 и установленным на опоре 41 бесконтактным детектором 53, на опоре 41 может, например, быть установлен только определенный тип фильтра 40 (речь идет о фильтрах 40, охватываемый (соответственно охватывающий) элемент которых выполнен с возможностью взаимодействовать с охватывающим (соответственно охватываемым) элементом бесконтактного детектора 53. Это позволяет убедиться, что на опоре 41 установлен только определенный фильтр 40 (например, данного качества или данной марки). Аналогично, в случае охватываемого-охватывающего взаимодействия между опорой 41 и установленным на контуре 30 бесконтактным детектором 53 на контуре 30 может быть установлен только определенный тип опоры 41. Это позволяет убедиться, что на контуре 30 установлена только определенная опора 41 с определенным фильтром 40 (например, данного качества или данной марки).
В четвертом варианте выполнения идентификатор 42 может быть одинаковым при любом фильтре 40 или опоре 41, и в этом случае этот идентификатор 42 служит только, чтобы определять, что фильтр 40 присутствует или отсутствует на контуре 30. В альтернативном варианте идентификатор 42 может быть разным (с учетом содержащегося в нем кода) для каждого фильтра (или каждой опоры 41) или для каждого типа фильтра 40 (или каждого типа опоры 41). В последнем случае бесконтактный детектор 54 может быть выполнен с возможностью обнаруживать только идентификаторы 42, соответствующие определенному типу фильтров 40 (или опоры 41 с этим типом фильтров 40), что позволяет убедиться, что на контуре 30 установлен только этот тип фильтра 40.
Объектом изобретения является также способ обнаружения отсутствия фильтра 40 в системе 1 улавливания тормозных частиц из фрикционной тормозной системы 10. Как было указано выше, эта система 1 улавливания содержит источник 20 разрежения, пневматический контур 30, соединяющий фрикционную тормозную систему 10 с источником 20 разрежения, фильтр 40, находящийся на пневматическом контуре 30 и установленный на опоре 41. Способ содержит следующие этапы:
(а) обеспечивают наличие блока 60 управления и устройства 50 обнаружения указанного фильтра 40, которые входят в состав системы 1 улавливания;
(b) устройство 50 обнаружения передает по меньшей мере один сигнал в блок 60 управления;
(с) блок 60 управления определяет на основании сигнала отсутствие фильтра 40 на пневматическом контуре 30 и информирует пользователя об этом отсутствии фильтра 40.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИДЕНТИФИКАЦИЯ ФИЛЬТРА В СИСТЕМЕ УЛАВЛИВАНИЯ ТОРМОЗНЫХ ЧАСТИЦ | 2021 |
|
RU2793014C1 |
| ОГРАНИЧЕНИЕ МАШИНЫ ПРИ ПОМОЩИ СИСТЕМЫ УЛАВЛИВАНИЯ ТОРМОЗНЫХ ЧАСТИЦ | 2021 |
|
RU2787907C1 |
| СИСТЕМА ВСАСЫВАНИЯ ЧАСТИЦ ТОРМОЖЕНИЯ С ОПЕРЕЖЕНИЕМ УПРАВЛЕНИЯ | 2019 |
|
RU2774338C1 |
| Система всасывания тормозных частиц с оптимизированным управлением | 2019 |
|
RU2774339C1 |
| СИСТЕМА ВСАСЫВАНИЯ ЧАСТИЦ ТОРМОЖЕНИЯ С СОХРАНЕНИЕМ РАЗРЕЖЕНИЯ | 2019 |
|
RU2787734C2 |
| Двойная тормозная система для колес транспортного средства | 1990 |
|
SU1822393A3 |
| ЧИСТЯЩИЙ АВТОМАТ, РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЧИСТЯЩЕГО АВТОМАТА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2002 |
|
RU2236814C2 |
| Тормозная система железнодорожного вагона | 2020 |
|
RU2801909C2 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И СПАСЕНИЯ ДЛЯ ПЛАВАТЕЛЬНЫХ БАССЕЙНОВ И ПАРКОВ ОТДЫХА И РАЗВЛЕЧЕНИЙ | 2003 |
|
RU2358324C2 |
| Тормозная система для транспортного средства | 1990 |
|
SU1779230A3 |
Изобретение относится к системе (1) улавливания тормозных частиц из фрикционной тормозной системы (10), содержащей источник (20) разрежения, пневматический контур (30), соединяющий указанную фрикционную тормозную систему (10) с указанным источником (20) разрежения, и фильтр (40), находящийся на пневматическом контуре (30) и установленный на опоре (41). Система (1) улавливания содержит блок (60) управления и устройство (50) обнаружения фильтра (40), выполненное с возможностью передавать по меньшей мере один сигнал в блок (60) управления, при этом блок (60) управления выполнен с возможностью определить на основании этого сигнала отсутствие фильтра (40) и информировать пользователя об этом отсутствии фильтра (40). Технический результат – возможность создания системы улавливания тормозных частиц, которая позволяет информировать пользователя транспортного средства об отсутствии фильтра системы улавливания, чтобы пользователь мог действовать соответствующим образом и, в частности, установить фильтр в системе. 2 н. и 7 з.п. ф-лы, 7 ил.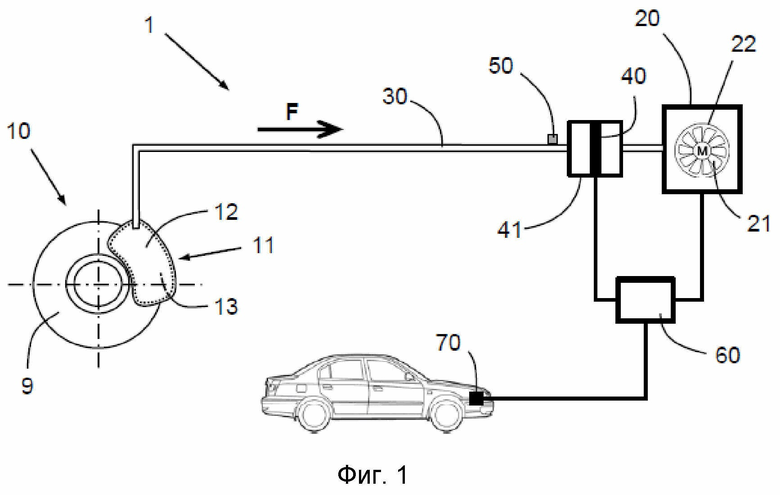
1. Система (1) улавливания тормозных частиц из фрикционной тормозной системы (10), содержащая источник (20) разрежения, пневматический контур (30), соединяющий указанную фрикционную тормозную систему (10) с указанным источником (20) разрежения, и фильтр (40), расположенный на указанном пневматическом контуре (30) и установленный на опоре (41), отличающаяся тем, что указанная система (1) улавливания содержит блок (60) управления и устройство (50) обнаружения указанного фильтра (40), выполненное с возможностью передавать по меньшей мере один сигнал в указанный блок (60) управления, при этом указанный блок (60) управления выполнен с возможностью определять на основании этого сигнала отсутствие указанного фильтра (40) на указанном пневматическом контуре (30) и информировать пользователя об этом отсутствии указанного фильтра (40).
2. Система (1) улавливания по п. 1, в которой указанное устройство (50) обнаружения содержит датчик (51) давления, который находится на указанном пневматическом контуре (30) перед указанным фильтром (40), причем указанный датчик (51) давления выполнен с возможностью передавать в сигнале в указанный блок (60) управления измерение давления Р1 в указанном пневматическом контуре (30) перед указанным фильтром (40), при этом указанный блок (60) управления выполнен с возможностью сравнивать по получении указанного сигнала указанное измеренное давление Р1 с контрольным давлением PR, которое является давлением в указанном пневматическом контуре (30) в отсутствие фильтра (40) при контрольном рабочем состоянии ER указанного источника (20) разрежения во время измерения указанного давления Р1 указанным датчиком (51) давления, при этом указанный блок (60) управления выполнен с возможностью информировать пользователя об отсутствии указанного фильтра (40) на указанном пневматическом контуре (30), когда указанное измеренное давление Р1 по существу равно указанному контрольному давлению PR или по существу равно атмосферному давлению.
3. Система (1) улавливания по п. 1, в которой указанное устройство (50) обнаружения содержит первый датчик (51) давления, который находится на указанном пневматическом контуре (30) перед указанным фильтром (40), при этом указанный датчик (51) давления выполнен с возможностью передавать в сигнале в указанный блок (60) управления измерение первого давления Р1 в указанном пневматическом контуре (30) перед указанным фильтром (40), и второй датчик (52) давления, который находится на указанном пневматическом контуре (30) за указанным фильтром (40) и который выполнен с возможностью передавать в сигнале в указанный блок (60) управления измерение второго давления Р2 в указанном пневматическом контуре (30) за указанным фильтром (40), при этом указанный блок (60) управления выполнен с возможностью сравнивать по получении по меньшей мере одного сигнала указанное первое измеренное давление Р1 и указанное второе измеренное давление Р2, при этом указанный блок (60) управления выполнен с возможностью информировать пользователя об отсутствии указанного фильтра (40) на указанном пневматическом контуре (30), когда указанное первое измеренное давление Р1 и указанное второе измеренное давление Р2 по существу равны или когда указанное первое измеренное давление Р1 по существу равно атмосферному давлению.
4. Система (1) улавливания по любому из пп. 1-3, в которой указанное устройство (50) обнаружения содержит контактный детектор (53), выполненный с возможностью обнаруживать контакт между указанным фильтром (40) и указанной опорой (41), при этом указанный контактный детектор (53) выполнен с возможностью передавать сигнал в указанный блок (60) управления, когда нет контакта между указанным фильтром (40) и указанной опорой (41), при этом указанный блок (60) управления выполнен с возможностью, при получении указанного сигнала, информировать пользователя об отсутствии указанного фильтра (40).
5. Система (1) улавливания по любому из пп. 1-3, в которой указанное устройство (50) обнаружения содержит контактный детектор (53), выполненный с возможностью обнаруживать контакт между указанной опорой (41) и указанным контуром (30), при этом указанный контактный детектор (53) выполнен с возможностью передавать сигнал в указанный блок (60) управления, когда нет контакта между указанной опорой (41) и указанным контуром (30), при этом указанный блок (60) управления выполнен с возможностью, при получении сигнала, информировать пользователя об отсутствии указанного фильтра (40).
6. Система (1) улавливания по любому из пп. 1-5, в которой указанное устройство (50) обнаружения содержит идентификатор (42), который находится на указанном фильтре (40) или на указанной опоре (41), и бесконтактный детектор (54), закрепленный вблизи указанной опоры (41) и выполненный с возможностью обнаруживать присутствие указанного идентификатора (42), при этом указанный бесконтактный детектор (54) выполнен с возможностью передавать сигнал в указанный блок (60) управления, когда указанный идентификатор (42) не обнаружен указанным бесконтактным детектором (43), причем указанный блок (60) управления выполнен с возможностью, при получении указанного сигнала, информировать пользователя об отсутствии указанного фильтра (40).
7. Система (1) улавливания по п. 6, в которой указанный идентификатор (42) расположен на указанной опоре (41), а указанный бесконтактный детектор (54) закреплен на указанном пневматическом контуре (30).
8. Система (1) улавливания по п. 6, в которой указанный идентификатор (42) расположен на указанном фильтре (40), а указанный бесконтактный детектор (54) закреплен на указанной опоре (41).
9. Способ обнаружения отсутствия фильтра (40) в системе (1) улавливания тормозных частиц из фрикционной тормозной системы (10), причем эта система (1) улавливания содержит источник (20) разрежения, пневматический контур (30), соединяющий указанную фрикционную тормозную систему (10) с указанным источником (20) разрежения, фильтр (40), находящийся на указанном пневматическом контуре (30) и установленный на опоре (41), при этом указанный способ содержит следующие этапы, на которых:
(а) обеспечивают наличие блока (60) управления и устройства (50) обнаружения указанного фильтра (40), которые входят в состав указанной системы (1) улавливания;
(b) указанное устройство (50) обнаружения передает по меньшей мере один сигнал в указанный блок (60) управления;
(с) указанный блок (60) управления определяет на основании этого сигнала отсутствие указанного фильтра (40) на указанном пневматическом контуре (30) и информирует пользователя об этом отсутствии указанного фильтра (40).
| FR 3057040 A, 06.04.2018 | |||
| KR 20050069079 A, 05.07.2005 | |||
| JP 2001286717 A, 16.10.2001 | |||
| УСТРОЙСТВО, СПОСОБ И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ ДЛЯ ВЫБОРА ГРУППЫ ЛУЧЕЙ И ПОДМНОЖЕСТВА ЛУЧЕЙ В СИСТЕМЕ СВЯЗИ | 2010 |
|
RU2538735C2 |

