Данное изобретение относится к системе улавливания тормозных частиц из фрикционной тормозной системы машины, которая содержит источник разрежения, пневматический контур, соединяющий фрикционную тормозную систему с источником разрежения, и фильтр, находящийся на пневматическом контуре и установленный на опоре.
Такими фрикционными тормозными системами могут быть оснащены дорожные или рельсовые транспортные средства. Такими фрикционными тормозными системами могут быть также оснащены стационарные роторные устройства, такие как ветроустановки, или промышленные установки.
В таких системах имеется источник разрежения (например, вращаемая двигателем всасывающая турбина), соединенный через пневматический контур с фрикционной тормозной системой, и фильтр для сбора частиц, выделяемых тормозной системой. Этот фильтр установлен перед источником разрежения и препятствует прохождению частиц через источник разрежения и их распространению в атмосферу. Однако в некоторых ситуациях этот фильтр забивается сверх заранее определенного допустимого порога, или система обнаружения забивания фильтра не работает, например, поскольку она намеренно или ненамеренно выключена. В этих ситуациях работа машины становится неэффективной.
Раскрытие сущности изобретения
Задача данного изобретения состоит в устранении вышеуказанных недостатков.
Изобретение призвано предложить систему улавливания тормозных частиц, которая позволяет ограничить работу транспортного средства или стационарной установки, когда фильтр забит или когда система обнаружения забивания фильтра не работает.
Эта задача решается за счет того, что система улавливания содержит блок управления, устройство управления машины и устройство обнаружения забивания фильтра, выполненное с возможностью передавать по меньшей мере один сигнал в блок управления, когда фильтр забит, при этом блок управления выполнен с возможностью определять на основании этого сигнала забивание фильтра и выполнен с возможностью определять, что устройство обнаружения не работает, при этом блок управления выполнен с возможностью активировать устройство управления, чтобы ограничить работу машины, когда фильтр забит или когда устройство обнаружения не работает, и выполнен с возможностью информировать пользователя о забивании фильтра.
Благодаря этим признакам, обнаруживают и определяют забивание фильтра на пневматическом контуре, и в этом случае работу машины ограничивают. Кроме того, блок управления выполнен с возможностью определять, что устройство обнаружения забивания не работает, и ограничивать работу машины и в этом случае.
Предпочтительно пользователь получает от блока управления информацию о забивании фильтра или о нарушении в работе устройства обнаружения.
Предпочтительно устройство обнаружения содержит датчик давления, который находится на пневматическом контуре перед фильтром, при этом устройство обнаружения выполнено с возможностью передавать в сигнале в блок управления измерение давления Р1 в пневматическом контуре перед фильтром, при этом блок управления выполнен с возможностью сравнивать по получении этого сигнала измеренное давление Р1 с контрольным давлением PR, которое является давлением в пневматическом контуре для определенного порога забивания фильтра при контрольном рабочем состоянии ER источника разрежения во время измерения давления Р1 датчиком давления, при этом блок управления выполнен с возможностью ограничивать работу машины, когда измеренное давление Р1 по существу равно или превышает контрольное давление PR.
Таким образом, обеспечивают надежное определение забивания фильтра.
В варианте устройство обнаружения содержит первый датчик давления, который находится на пневматическом контуре перед фильтром, при этом устройство обнаружения выполнено с возможностью передавать в сигнале в блок управления измерение первого давления Р1 в пневматическом контуре перед фильтром, и второй датчик давления, который находится за фильтром, при этом устройство обнаружения выполнено с возможностью передавать в сигнале в блок управления измерение второго давления Р2 в пневматическом контуре за фильтром, при этом блок управления выполнен с возможностью сравнивать по получении по меньшей мере одного сигнала первое измеренное давление Р1 и второе измеренное давление Р2, при этом блок управления выполнен с возможностью ограничивать работу машины, когда разность (Р1 – Р2) между первым измеренным давлением Р1 и вторым измеренным давления Р2 по существу равна или превышает пороговую разность давления ΔР, которая соответствует определенному порогу забивания фильтра.
Таким образом, обеспечивают надежное определение забивания фильтра.
Объектом изобретения является также машина, содержащая заявленную систему улавливания.
Объектом изобретения является также способ обнаружения забивания фильтра в системе улавливания тормозных частиц из фрикционной тормозной системы машины, причем эта система улавливания содержит источник разрежения, пневматический контур, соединяющий фрикционную тормозную систему с источником разрежения, фильтр, находящийся на пневматическом контуре и установленный на опоре.
Согласно изобретению, способ содержит следующие этапы:
(а) Обеспечивают наличие блока управления, устройства управления машины и устройства обнаружения забивания фильтра, которые входят в состав системы улавливания;
(b) Блок управления определяет, является ли устройство обнаружения неработающим;
(с) Устройство обнаружения передает по меньшей мере один сигнал в блок управления, когда фильтр забит, если устройство обнаружения является работающим;
(d) Блок управления определяет на основании сигнала, является ли фильтр забитым;
(е) Блок управления активирует устройство управления для ограничения работы машины, когда фильтр забит или когда устройство обнаружения является неработающим.
Предпочтительно способ дополнительно содержит следующий этап:
(f) Блок управления информирует пользователя о забивании фильтра или о нарушении в работе устройства обнаружения.
Изобретение и его преимущества будут более очевидны из нижеследующего подробного описания вариантов осуществления, представленных в качестве неограничивающих примеров. Описание ссылается на прилагаемые чертежи, на которых:
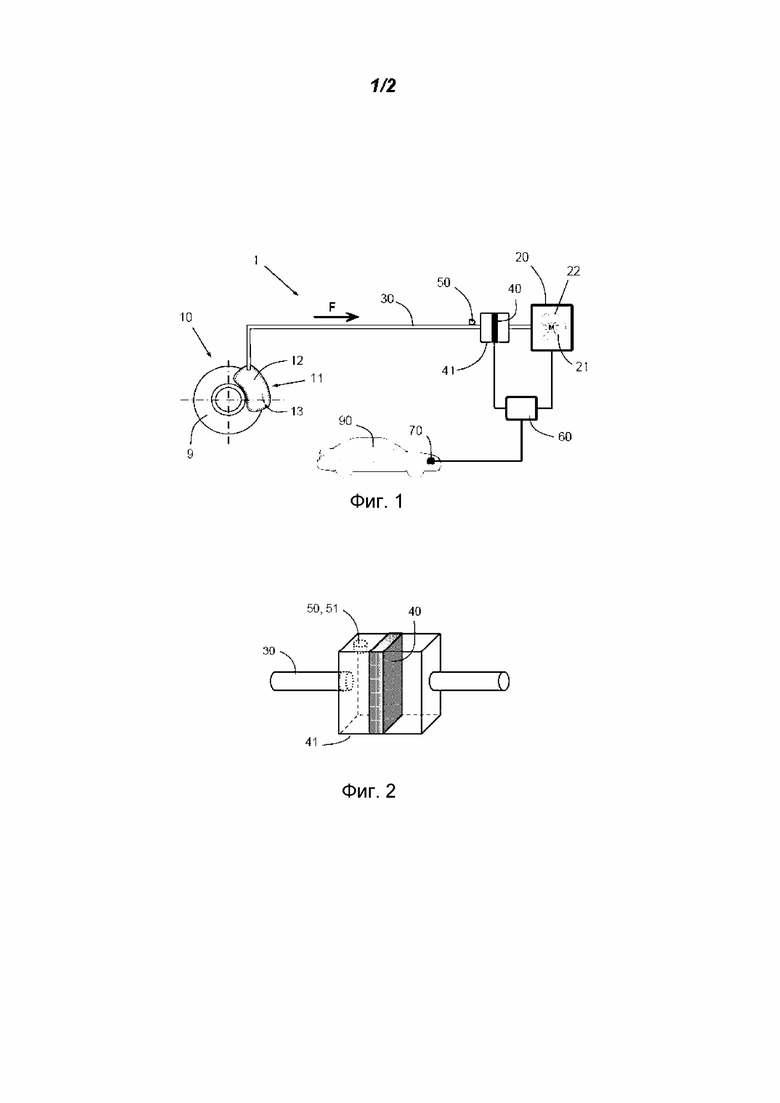
на фиг. 1 схематично показана заявленная система улавливания;
на фиг. 2 показаны корпус с фильтром и устройство обнаружения забивания этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе;
на фиг. 3 показаны корпус с фильтром и версия устройства обнаружения забивания этого фильтра в системе улавливания, изображенной на фиг. 1, вид в перспективе.
Осуществление изобретения
На фиг. 1 схематично показана заявленная система 1 улавливания частиц, выделяемых фрикционной тормозной системой 10.
Эта фрикционная тормозная система 10 содержит тормозную колодку 11 для торможения машины 90. Эта машина является либо транспортным средством, либо стационарной установкой. Эта колодка 11 содержит основу 12 и накладку 13, выполненную из фрикционного материала и закрепленную на основе 12. На фиг. 1 колодка 11 показана снизу, при этом на первом плане показана основа 12.
Колодка 11 (первая колодка) находится напротив диска 9, который приводится во вращение машиной 90, например, колесом транспортного средства, когда эта машина является транспортным средством. Вторая идентичная колодка (не видна) находится с другой стороны диска 9 и напротив первой колодки 11 таким образом, что эти две колодки охватывают между собой диск 9. Торможение диска 9 происходит за счет трения двух накладок 13 по диску 9, когда эти две колодки приближаются к диску 9.
Система 1 улавливания содержит пневматический контур 30 и источник 20 разрежения. Колодка 11 и вторая колодка связаны с источником 20 разрежения через этот пневматический контур 30. Например, источник 20 разрежения содержит электрический двигатель 21 и всасывающую турбину 22, приводимую во вращение этим электрическим двигателем 21.
Во время работы источник 20 разрежения может всасывать частицы сразу при их выделении накладками 13 и через пневматический контур 30. Направление циркуляции воздуха и частиц во время нормальной работы показано на фиг. 1 стрелкой F. Таким образом, стрелка F показывает прохождение от входа к выходу. Система 1 улавливания дополнительно содержит фильтр 40, который находится на контуре 30, то есть через него проходит воздух, проходящий по контуру 30. Этот фильтр 40 установлен на опоре 41, закрепленной на контуре 30. Например, опора 41 представляет собой корпус, в котором расположен фильтр 40, как показано на фигурах. Таким образом, фильтр 40 делит корпус 41 на верхнюю по потоку часть и на нижнюю по потоку часть. Воздух, поступающий из верхней по потоку части контура 30, заходит в корпус 41 через входной патрубок корпуса 41, проходит через фильтр 40 и выходит из корпуса 41 через выходной патрубок корпуса 41, после чего заходит в нижнюю по потоку часть контура 30.
Система 1 улавливания дополнительно содержит блок 60 управления, устройство 70 управления машины 90 и устройство 50 обнаружения фильтра 40. Этот блок 60 управления и это устройство 50 обнаружения служат для определения забивания фильтра 40 сверх определенного порога забивания. Блок 60 управления принимает сигналы от устройства 50 обнаружения (которое содержит элемент для генерирования и передачи этих сигналов), а также выполнен с возможностью управлять источником 20 разрежения и принимать от него информацию и с возможностью управлять устройством 70 управления машины 90. Эти взаимодействия между блоком 60 управления, устройством 70 управления, устройством 50 обнаружения и источником 20 разрежения схематично показаны на фиг. 1 жирными линиями. Эти взаимодействия могут быть реализованы через электрические линии. Работа этого блока 60 управления, устройства 70 управления и этого устройства 50 обнаружения описана ниже.
Во время работы системы 1 улавливания устройство 50 обнаружения передает по меньшей мере один сигнал в блок 60 управления, если это устройство 50 обнаружения является работающим. Под выражением «по меньшей мере один сигнал» следует понимать либо непрерывный сигнал, либо сигнал через равномерные промежутки времени. Этот сигнал содержит прямую или опосредованную информацию, относящуюся к забиванию фильтра 40, то есть отображает уровень реального забивания фильтра 40. Считается, что забивание является реальным, когда фильтр 40 забит сверх определенного порога забивания, причем этот порог определяют заранее. Блок 60 управления определяет забивание фильтра 40 на основании этого сигнала, сравнивания уровень реального забивания фильтра 40 и заранее определенный порог забивания.
Возможно также, что устройство 50 обнаружения является неработающим (нарушение в работе). Например, это происходит по причине его неисправности или поскольку оно намеренно или ненамеренно выключено. В этой ситуации устройство 50 обнаружения не может обнаруживать забивание фильтра 40 и не может передать сигнал в блок 60 управления. Это отсутствие передачи сигнала представляет собой прерывание сигнала, если этот сигнал является непрерывным, или отсутствие передачи сигнала в момент, когда он должен быть передан, когда этот сигнал является периодическим. Таким образом, блок 60 управления определяет нарушение в работе устройства 50 обнаружения за счет того, что блок 60 управления перестает принимать сигнал от устройства 50 обнаружения.
В обоих вышеуказанных случаях (случай забивания фильтра 40 сверх определенного порога забивания и случай неработающего устройства 50 обнаружения) блок управления активирует устройство 70 управления машины 90 для ограничения работы машины 90, например, для ограничения скорости вращения диска, на котором установлена фрикционная тормозная система 10. В случае, когда машина 90 является транспортным средством, этим ограничением является ограничение скорости перемещения транспортного средства. Если машина 90 выключена, это ограничение работы может представлять собой воспрепятствование запуску машины 90. В случае, когда машина 90 является транспортным средством, транспортное средство остается неподвижным.
Согласно варианту осуществления, блок 60 управления информирует пользователя о забивании фильтра 40 (или о нарушении в работе устройства 70 управления). Эта информация может предоставляться при помощи любого средства, например, посредством отображения на приборной панели транспортного средства текста, такого как «Фильтр забит», «Обнаружение неработающего фильтра», или значка, или светового индикатора, и/или, например, посредством воздействия на пользователя вибрациями при помощи вибрационной системы, находящейся под сидением и управляемой блоком 60 управления.
Ниже следует описание варианта выполнения устройства 50 обнаружения фильтра 40 со ссылками на фиг. 2. На фиг. 2 представлен более детальный вид опоры 41, фильтра 40 и устройства 50 обнаружения.
Устройство 50 обнаружения содержит (первый) датчик 51 давления, который находится на пневматическом контуре 30 перед фильтром 40. В идеале датчик 51 давления находится достаточно близко к фильтру 40, чтобы давление, измеряемое датчиком 51 давления, было идентичным с давлением в месте, где находится фильтр 40 или где он должен находиться, если он присутствует. Таким образом, датчик 51 давления находится либо на пневматическом контуре 30 вблизи опоры 41 фильтра 40, либо в опоре 41 фильтра, как показано на фиг. 2. Выражение «находится в опоре 41» значит, что датчик давления находится на опоре или в опоре, если опора является корпусом, и во всех случаях датчик измеряет давление в месте этой опоры 41.
Датчик 51 давления выполнен с возможностью измерять (первое) давление Р1 в пневматическом контуре 30 перед фильтром 40, и устройство 50 обнаружения выполнено с возможностью передавать в блок 60 управления результат этого измерения в сигнале. Во время этого измерения источник 20 разрежения работает в рабочем состоянии, называемом контрольным рабочим состоянием ЕR. Это рабочее состояние характеризуется параметром, которым является, например, скорость V вращения всасывающей турбины 22. Так, в контрольном рабочем состоянии ER всасывающая турбина 22 вращается со скоростью VR вращения. Блок 60 управления содержит в памяти контрольное давление PR, которое создается в пневматическом контуре 30, для определенного порога забивания фильтра 40 при контрольном рабочем состоянии ЕR источника 20 разрежения. Понятно, что это контрольное давление PR меняется в зависимости от этого контрольного рабочего состояния ЕR. Так, контрольное давление PR меняется в зависимости от скорости VR вращения турбины 22. При получении сигнала, содержащего это давление Р1, измеренное в пневматическом контуре 30, блок 60 управления сравнивает это измеренное давление Р1 с контрольным давлением PR. Это контрольное давление PR соответствует давлению в пневматическом контуре 30 при определенном пороге забивания фильтра 40 при контрольном рабочем состоянии ЕR источника 20 разрежения, и измерение первого давления Р1 датчиком 51 давления происходит при этом контрольном рабочем состоянии ЕR. Следовательно, если первое давление Р1 по существу равно или превышает контрольное давление PR, это значит, что фильтр 40 забит сверх порога забивания. Под выражением «по существу равно» следует понимать, что давление находится в небольшом интервале вблизи контрольного давления. Например, этот интервал равен +/- 1%, или +/- 2%, или +/- 5%, или +/- 10% от значения контрольного давления. Таким образом, в ситуации, когда Р1 по существу равно или превышает PR, блок 60 управления ограничивает работу машины 90.
Далее следует описание версии этого варианта осуществления, в которой, кроме первого датчика 51 давления, устройство 50 обнаружения содержит второй датчик 52 давления. Эта версия представлена на фиг. 3. Первый датчик 51 давления находится перед фильтром 40 на контуре 30. Второй датчик 52 давления находится за фильтром 40 на контуре 30. Например, первый датчик 51 и второй датчик 52 находятся в опоре 41, как показано на фиг. 3. Первый датчик 51 давления выполнен с возможностью измерять первое давление Р1 в пневматическом контуре 30 перед фильтром 40, и устройство 50 обнаружения выполнено с возможностью направлять в блок 60 управления это измерение в сигнале. Параллельно, например, одновременно, второй датчик 52 давления может измерить второе давление Р2 в пневматическом контуре 30 за фильтром 40, и устройство 50 обнаружения выполнено с возможностью направлять в блок 60 управления это измерение в сигнале. Например, измерение первого давления Р1 и измерение второго давления Р2 передаются в одном и том же сигнале. При получении этого сигнала или двух сигналов блок 60 управления может сравнить первое давление Р1 со вторым давлением Р2. Если разность (Р1 – Р2) между первым измеренным давлением Р1 и вторым измеренным давлением Р2 по существу равна или превышает пороговую разность ΔР давления, это значит, что фильтр 40 забит сверх порога забивания. Блок 60 управления содержит в памяти эту пороговую разность ΔР давления, которая действительна для рабочего состояния источника 20 разрежения во время измерений первого давления Р1 и второго давления Р2. Таким образом, в ситуации, когда (Р1 – Р2) по существу равно или превышает ΔР, блок 60 управления ограничивает работу машины 90.
Вариант выполнения и его описанную выше версию можно комбинировать. Так, блок управления может одновременно сравнивать (Р1 – Р2) с ΔР и сравнивать Р1 с PR.
Объектом изобретения является также машина, содержащая описанную выше систему 1 улавливания.
Объектом изобретения является также способ обнаружения забивания фильтра 40 в системе 1 улавливания тормозных частиц из фрикционной тормозной системы 10 машины 90. Как было указано выше, эта система 1 улавливания содержит источник 20 разрежения, пневматический контур 30, соединяющий фрикционную тормозную систему 10 с источником 20 разрежения, фильтр 40, находящийся на пневматическом контуре 30 и установленный на опоре 41. Этот способ содержит следующие этапы:
(а) Обеспечивают наличие блока 60 управления, устройства 70 управления машины 90 и устройства 50 обнаружения забивания фильтра 40, которые входят в состав системы 1 улавливания;
(b) Блок 60 управления определяет, является ли устройство 50 обнаружения неработающим;
(с) Устройство 50 обнаружения передает по меньшей мере один сигнал в блок 60 управления, когда фильтр 40 забит, если устройство 50 обнаружения является работающим;
(d) Блок 60 управления определяет на основании сигнала, является ли фильтр 40 забитым;
(е) Блок 60 управления активирует устройство 70 управления для ограничения работы машины 90, когда фильтр 40 забит или когда устройство 50 обнаружения является неработающим.
Способ дополнительно содержит следующий этап (f), который предшествует или следует непосредственно за этапом (е):
(f) Блок 60 управления информирует пользователя о забивании фильтра 40 или о нарушении в работе устройства 50 обнаружения.

Изобретение относится к системе (1) улавливания тормозных частиц из фрикционной тормозной системы (10) машины (90), содержащей источник (20) разрежения, пневматический контур (30), соединяющий фрикционную тормозную систему (10) с указанным источником (20) разрежения, и фильтр (40), находящийся на указанном пневматическом контуре (30) и установленный на опоре (41). Система (1) улавливания содержит блок (60) управления, устройство (70) управления указанной машины (90) и устройство (50) обнаружения забивания фильтра (40), выполненное с возможностью передавать по меньшей мере один сигнал в блок (60) управления, когда фильтр (40) забит, при этом блок (60) управления выполнен с возможностью определять на основании этого сигнала забивание фильтра (40) и выполнен с возможностью определять, что устройство (50) обнаружения не работает, при этом блок (60) управления выполнен с возможностью активировать устройство (70) управления, чтобы ограничить работу машины (90), когда фильтр (40) забит или когда устройство (50) обнаружения не работает. Технический результат - возможность ограничения работы транспортного средства или стационарной установки, когда фильтр забит или когда система обнаружения забивания фильтра не работает. 3 н. и 4 з.п. ф-лы, 3 ил.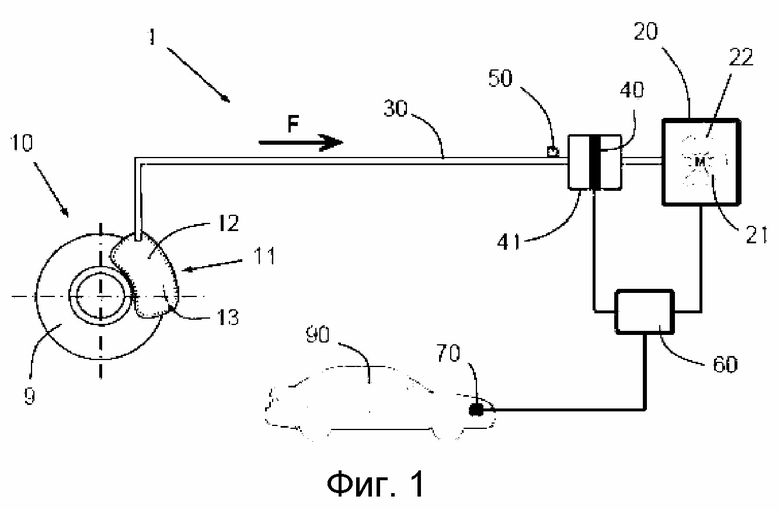
1. Система (1) улавливания тормозных частиц из фрикционной тормозной системы (10) машины (90), содержащая источник (20) разрежения, пневматический контур (30), соединяющий указанную фрикционную тормозную систему (10) с указанным источником (20) разрежения, и фильтр (40), находящийся на указанном пневматическом контуре (30) и установленный на опоре (41), отличающаяся тем, что указанная система (1) улавливания содержит блок (60) управления, устройство (70) управления указанной машины (90) и устройство (50) обнаружения забивания указанного фильтра (40), выполненное с возможностью передавать по меньшей мере один сигнал в указанный блок (60) управления, когда фильтр (40) забит, при этом указанный блок (60) управления выполнен с возможностью определять на основании этого сигнала забивание указанного фильтра (40) и выполнен с возможностью определять, что указанное устройство (50) обнаружения не работает, при этом указанный блок (60) управления выполнен с возможностью активировать указанное устройство (70) управления, чтобы ограничить работу машины (90), когда указанный фильтр (40) забит или когда указанное устройство (50) обнаружения не работает.
2. Система (1) улавливания по п. 1, в которой блок (60) управления выполнен с возможностью информировать пользователя о забивании фильтра (40) или о нарушении в работе устройства (50) обнаружения.
3. Система (1) улавливания по п. 1 или 2, в которой указанное устройство (50) обнаружения содержит датчик (51) давления, расположенный на указанном пневматическом контуре (30) перед указанным фильтром (40), при этом указанное устройство (50) обнаружения выполнено с возможностью передавать в сигнале в указанный блок (60) управления измерение давления Р1 в указанном пневматическом контуре (30) перед указанным фильтром (40), причем указанный блок (60) управления выполнен с возможностью сравнивать по получении этого сигнала указанное измеренное давление Р1 с контрольным давлением PR, которое является давлением в указанном пневматическом контуре (30) для определенного порога забивания указанного фильтра (40) при контрольном рабочем состоянии ER указанного источника (20) разрежения во время указанного измерения давления Р1 указанным датчиком (51) давления, при этом указанный блок (60) управления выполнен с возможностью ограничивать работу машины (90), когда указанное измеренное давление Р1 по существу равно или превышает указанное контрольное давление PR.
4. Система (1) улавливания по п. 1 или 2, в которой указанное устройство (50) обнаружения содержит первый датчик (51) давления, расположенный на указанном пневматическом контуре (30) перед указанным фильтром (40), при этом указанное устройство (50) обнаружения выполнено с возможностью передавать в сигнале в указанный блок (60) управления измерение первого давления Р1 в указанном пневматическом контуре (30) перед указанным фильтром (40), и второй датчик (52) давления, расположенный на указанном пневматическом контуре (30) за указанным фильтром (40), при этом указанное устройство (50) обнаружения выполнено с возможностью передавать в сигнале в указанный блок (60) управления измерение второго давления Р2 в указанном пневматическом контуре (30) за указанным фильтром (40), при этом указанный блок (60) управления выполнен с возможностью сравнивать по получении по меньшей мере одного сигнала указанное первое измеренное давление Р1 и указанное второе измеренное давление Р2, при этом указанный блок (60) управления выполнен с возможностью ограничивать работу машины (90), когда разность (Р1 – Р2) между указанным первым измеренным давлением Р1 и указанным вторым измеренным давлением Р2 по существу равна или превышает пороговую разность давления ΔР, которая соответствует определенному порогу забивания указанного фильтра (40).
5. Машина (90), содержащая систему (1) улавливания по любому из пп. 1-4.
6. Способ обнаружения забивания фильтра (40) в системе (1) улавливания тормозных частиц из фрикционной тормозной системы (10) машины (90), причем эта система (1) улавливания содержит источник (20) разрежения, пневматический контур (30), соединяющий указанную фрикционную тормозную систему (10) с указанным источником (20) разрежения, фильтр (40), находящийся на указанном пневматическом контуре (30) и установленный на опоре (41), при этом указанный способ отличается тем, что содержит следующие этапы, на которых:
(а) обеспечивают наличие блока (60) управления, устройства (70) управления машины (90) и устройства (50) обнаружения забивания указанного фильтра (40), которые входят в состав указанной системы (1) улавливания;
(b) указанный блок (60) управления определяет, является ли указанное устройство (50) обнаружения неработающим;
(с) указанное устройство (50) обнаружения передает по меньшей мере один сигнал в указанный блок (60) управления, когда указанный фильтр (40) забит, если устройство (50) обнаружения является работающим;
(d) указанный блок (60) управления определяет на основании указанного сигнала, является ли указанный фильтр (40) забитым;
(е) указанный блок (60) управления активирует указанное устройство (70) управления для ограничения работы машины (90), когда указанный фильтр (40) забит или когда указанное устройство (50) обнаружения является неработающим.
7. Способ обнаружения по п. 6, дополнительно содержащий следующий этап:
(f) указанный блок (60) управления информирует пользователя о забивании фильтра (40) или о нарушении в работе устройства (50) обнаружения.
| ТОРМОЗНОЕ УСТРОЙСТВО С УЛАВЛИВАТЕЛЕМ ЧАСТИЦ | 2013 |
|
RU2644037C2 |
| FR 3057040 A, 06.04.2018 | |||
| WO 2019086814 A1, 09.05.2019. | |||

