Область техники
Заявляемое изобретение относится к роботам в виде головы, и может быть использована в рекламных, охранных, развлекательных, образовательных целях.
Уровень техники
Из уровня техники известен проекционный антропоморфный робот "РобоКлон" по патенту на полезную модель № 195261 (Заявка: 2019124137; МПК B25J 11/00. Патентообладатель: Общество с ограниченной ответственностью "НейроАс" (RU). Опубликовано: 21.01.2020) [1]. Робот содержит управляющий компьютер, корпус в виде головы, выполненной с центральной и затылочной частями, лицевой проекционной поверхностью и отражающим элементом, и полуторса с проекционным устройством. Полуторс робота снабжен устройством воспроизведения звука, обеспечивающим воспроизведение звука в соответствии с командами управляющего компьютера, и жестким основанием с закрепленным на нем приводным модулем с управляющей платой, обеспечивающим изменение положения головы и связанным с управляющим компьютером. Управляющий компьютер и проекционное устройство закреплены на указанном основании полуторса. Задачей данного технического решения является создание робототехнической системы, обеспечивающей высокий уровень надежности при эксплуатации, с учетом ее использования в образовательных целях. Известный по полезной модели робот не предназначен для реагирования на приблизившиеся объекты, отслеживания их положений.
Известно техническое решение «голова манекена, принимающая гостя» по патенту KR 102173194 (заявка KR 20190120256; МПК G09F19/08. Заявитель KIMBAEKUN [KR] Опубликовано 02.11.2020-11)[2]. Известное изобретение раскрывает приветствие в виде головы манекена. Согласно изобретению приветствие в виде головы манекена включает в себя: голову манекена с плоским круглым диском на дне; шарнир, позволяющий манекену поворачиваться вперед; крышку, поддерживающую головку манекена снизу для поддержания вертикального состояния и сформированную с кулачковым отверстием, через которое кулачок входит и выходит, и выходным отверстием динамика, через которое издается голос говорящего; редукционный двигатель, расположенный под крышкой и заставляющий манекенную головку вращаться вокруг шарнира; и динамик, предусмотренный под выходным отверстием динамика в крышке для вывода звука. Изобретение отличает покупателя, входящего в магазин, от уходящего покупателя и приветствует его другим словом, не мешая входу и выходу покупателей, которые входят в магазин. В изобретении используются два датчика PIR, которые могут обнаруживать движение человека, по которому можно отличить человека, входящего в магазин, от человека, выходящего из магазина, и различное сообщение для человека, входящего в магазин и человека, выходящего из магазина (например, вы можете приветствовать людей, которые входят в магазин, словом «Добро пожаловать», а тех, кто выходит из магазина, - «Прощай»).
Применение датчиков PIR (датчики движения) в патенте KR 102173194[2] имеет рад недостатков. Датчики подобного типа реагируют только на движение объекта. Статические объекты, если человек просто стоит без движения, не могут быть обнаружены такими датчиками. Так, если образуется затор из людей, то такие датчики будут просто считать, что объекта нет, пока не начнется движение очереди, причем в этом случае, модель не сможет корректно определять, в какую именно сторону движется очередь. Кроме того, датчики подобного типа не могут определять расстояние до объекта, и устройство всегда будет учитывать лишь движущийся объект без учета прочих характеристик, таких как расстояние до него, положение объекта в пространстве, скорость его перемещения. Датчики подобного типа не могут быть использованы для определения положения объекта, а определяют лишь наличие движущегося объекта и не более того. Это позволяет использовать модель «голова манекена, принимающая гостя» в ограниченных условиях, а именно, в коридорах, входных проемах, там, где должен проходить поток посетителей в поперечном направлении, относительно модели, причем, это должны быть единичные посетители, так как подобная конструкция, не способна распознать два объекта движущиеся одновременно в разные стороны и не сможет определить направление движения корректно. Для настройки входящего и исходящего потоков объектов, на корпусе имеется переключатель «направления движения». Кроме того, датчики PIR не способные распознавать количество объектов, расстояние до них и направление движения, а они лишь фиксируют движение объекта в зоне видимости датчика.
В патенте KR 102173194[2] применен кулачковый механизм наклона головы, с пружинно-возвратным механизмом, что обеспечивает небольшой угол наклона, порядка 15-20 градусов. Кроме того, такой механизм не позволяет изменять угол наклона произвольно и плавно, а есть только два положения - голова опущена, голова поднята. Так же в этой конструкции не предусмотрена возможность менять скорость наклона головы.
Голова в патенте KR 102173194[2] выполняет наклоны с центром поворота, расположенном в нижней части шеи, т.е. выполняется наклон шеи и головы относительно основания. Это в свою очередь приводит к смещению центра тяжести при наклоне и при маленькой или неправильно установленной подставке, может просто уронить модель. Резкие наклоны достаточно тяжелой конструкции головы, могут привести к ее смещению вперед, во время кивков, что так же может привести к ее падению, если она плохо закреплена на месте установки.
Голова по патенту KR 102173194 [2] должна быть установлена на собственной площадке, так как там находится механизм наклона головы, там находится электроника управления, динамики, датчики, переключатель направления. Такая площадка, является неотъемлемой частью всей конструкции. Это накладывает ряд ограничений на место установки модели, а именно, должна быть плоская поверхность, имеющая размер не менее размера основания модели. Причем, как было описано выше, эта вся конструкция должна быть достаточно устойчивой во время работы модели.
Указанные недостатки ограничивают применение известного изобретения.
Известен рекламный робот-манекен по патенту Кореи KR20060107449 (Заявка № KR 20060086907. МПК G09F 19/00; G09F 19/08. Заявитель SHINDONGJU [KR]. Опубликовано 13.10.2006) [3]. Изобретение относится к рекламным манекенам, в которых модель человека, животного, растения и т.п. может динамически двигаться и говорить. В частности, голос или песня, рекламируемая в соответствии с движением глаз манекена, шеи, талии и ног манекена. Настоящее изобретение может рекламировать с помощью дружеских услуг гида или приветствий в общественных учреждениях и общественных местах. Кроме того, настоящее изобретение можно использовать для приветствий, музыки, танцев, пения или разговоров, вызывающих внимание и внимание прохожих или клиентов, а также вежливое обслуживание и рекламный эффект. В частности, глаза манекена движутся вертикально, горизонтально или по кругу. Манекен может наклонять голову.
В изобретении использована механическая конструкция, включающая в себя рычаги, кулачки, муфты, кронштейны и двигатели для глаз, головы, рук и туловищных ног манекена, чтобы глаза, голова, руки, туловище и ноги могли двигаться, динамик воспроизводит голос в манекене. Плата синтеза голоса и блок питания встроены в манекен.
Известный робот-манекен предназначен для использования движений и ритмов, необходимых для заведения, или движений и ритмов, которые могут привлечь внимание и дружелюбное обслуживание через музыкальные песни и голоса. В нем не предусмотрены датчики для обнаружения объекта.
Задача заявляемого изобретения - расширение ассортимента роботов, используемых в рекламных, развлекательных, образовательных, охранных целях.
Технический результат, достигаемый заявляемым изобретением заключается в создании информационно-развлекательного робота в виде сферической головы, снабженного двумя ультразвуковыми датчиками по бокам головы, позволяющими определять положения объектов относительно него и реагировать на появление и перемещение объектов путем поворота и/или наклона головы с выдачей световой индикации и речевых обращений по сигналам с блока управления, с сохранением устойчивости конструкции.
Раскрытие изобретения
Информационно-развлекательный робот, содержащий блок управления , корпус в виде головы, выполненной с центральной и затылочной частями, установленный на стойке с возможностью поворота головы вправо и влево и наклона головы вперед, при этом на стойке установлена поворотная платформа с механизмом поворота головы вправо и влево, и наклонная платформа с механизмом наклона головы, расположенные внутри корпуса головы, и с помощью механических связей соединенные между собой и с головой робота; при этом робот содержит два ультразвуковых датчика, размещенных снаружи, на боковых поверхностях головы, и элементы световой индикации состояния робота, расположенные на боковых и лицевой поверхностях головы , причем робот выполнен с возможностью изменения положения головы, выдачи речевых сообщений, записанных на сменном носителе, через звуковоспроизводящее устройство и имитации моргания глаз и открывания-закрывания рта элементами световой индикации по командам блока управления в ответ на полученные сигналы от ультразвуковых датчиков.
При этом блок управления с элементами управления состоянием робота, включающими: драйвер управления поворотом головы; драйверы световой индикации состояния ультразвуковых датчиков, драйверы управления световой индикацией обнаружения объекта; драйвер управления имитацией движения глаз, драйвер управления имитацией открывания-закрывания рта, а также звуковоспроизводящее устройство, выполнены на печатной плате, расположенной на наклонной платформе.
При этом механизм поворота головы содержит горизонтальную зубчатую передачу, состоящую из зубчатого колеса, закрепленного на стойке, и шестерни, закрепленной на валу редуктора привода поворота головы, причем привод закреплен сверху на поворотной платформе , а вал редуктора пропущен через канал в поворотной платформе и зубчатая шестерня установлена на его конце с зацеплением с зубчатым колесом, при этом привод поворота головы выполнен с возможностью получения управляющих сигналов от драйвера управления поворотом головы для приведения во вращение поворотную платформу и соединенную с ней механическими связями наклонную платформу с закрепленной на ней головой робота.
При этом механизм наклона головы выполнен на наклонной платформе, установленной на двух вертикальных стойках, закрепленных на поворотной платформе, и на которых подвижно установлена наклонная платформа с возможностью наклона относительно поворотной платформы, при этом на нижней поверхности наклонной платформы жестко закреплено половинчатое зубчатое колесо, которое вместе с шестерней, установленной на оси привода механизм наклона головы, закрепленного на поворотной платформе, образует вертикальную зубчатую передачу механизма наклона головы, причем привод наклона головы выполнен с возможностью получения управляющих сигналов от блока управления для осуществления наклона наклонной платформы и вместе с ней головы .
При этом робот содержит звуковоспроизводящее устройство, к которому подключен сменный USB флеш-накопитель с записанными звуковыми файлами, при этом звуковоспроизводящее устройство соединено с динамиком, и подключено к блоку управления с возможностью получения команды на воспроизведение определенного звукового файла, записанного на флеш-накопителе. К звуковоспроизводящему устройству подключен регулятор громкости.
Аспекты изобретения раскрыты в нижеследующем описании и связанных с ним чертежах, показывающих конкретные варианты осуществления изобретения. Могут быть реализованы также иные варианты осуществления настоящего изобретения, не выходящие за рамки сущности настоящего изобретения. Кроме того, хорошо известные элементы изобретения не будут описаны в деталях или будут опущены, чтобы другие детали могли быть описаны с достаточной ясностью
Краткое описание чертежей
Существо изобретения будет понятно из последующего подробного пояснения на примере конкретной реализации со ссылкой на чертеж, где показана блок-схема робота.
Перечень фигур
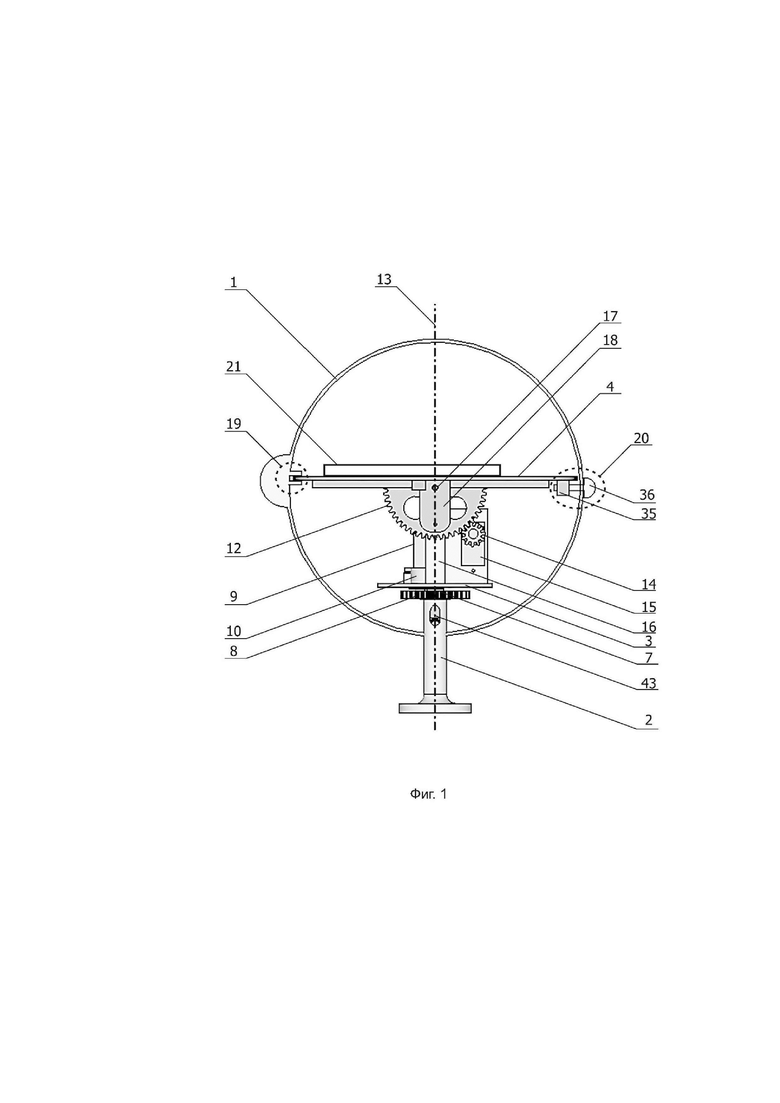
фиг. 1 - Схема робота, вид сбоку
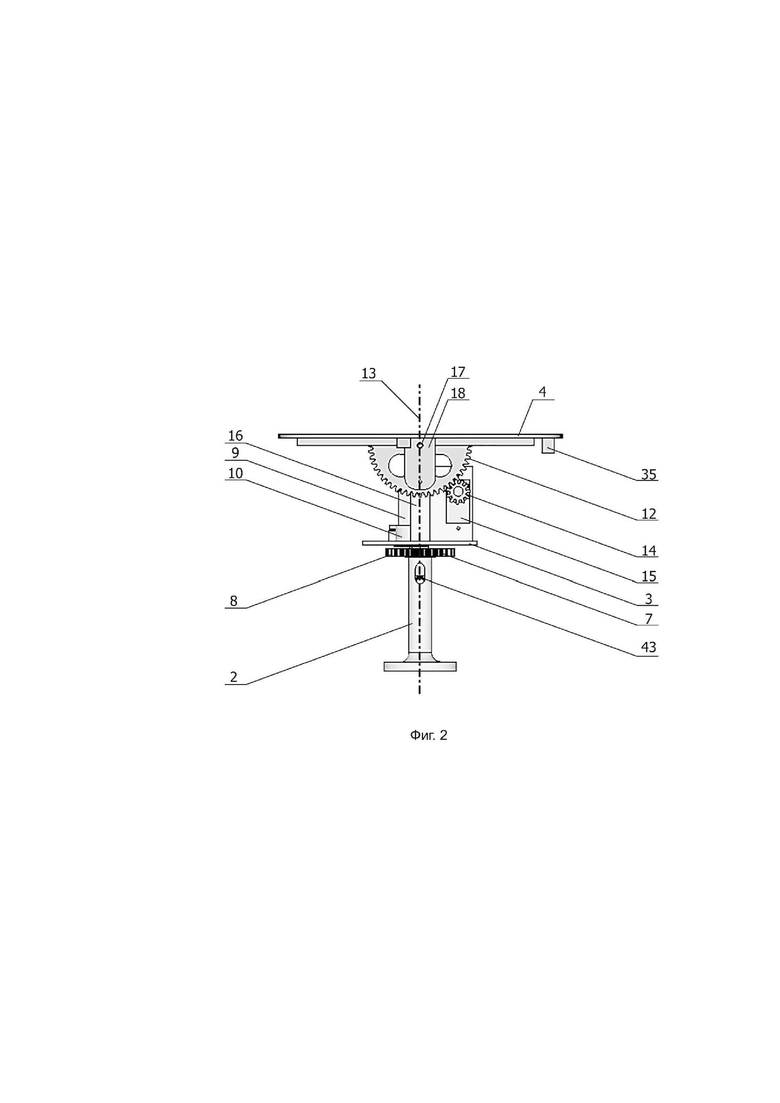
фиг. 2 - Стойка с механизмами поворота и наклона; вид сбоку
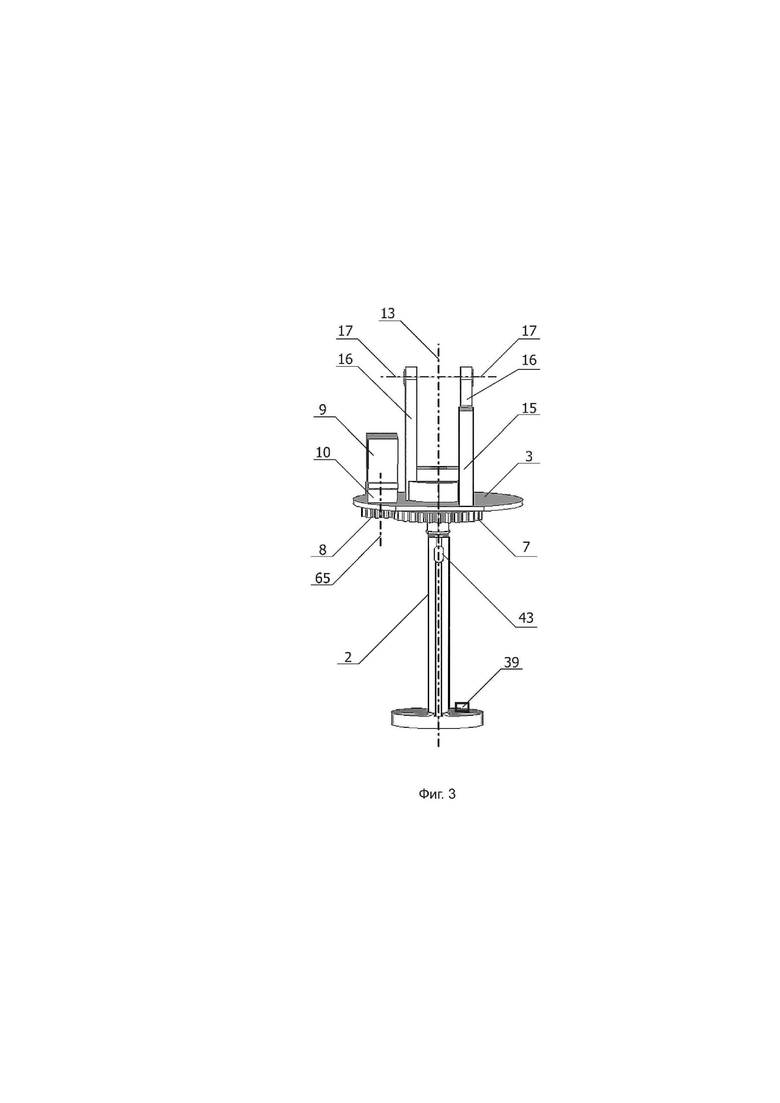
фиг. 3 - Стойка с поворотной платформой:
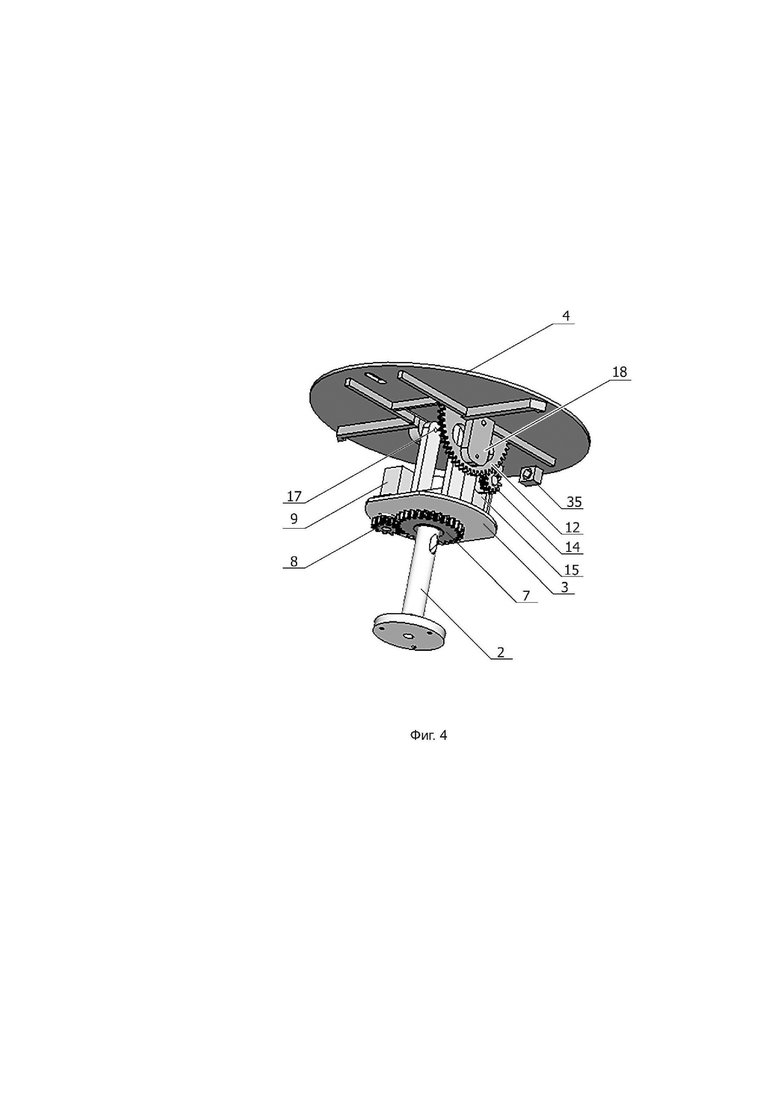
фиг. 4 - Стойка с механизмами поворота и наклона; вид снизу.
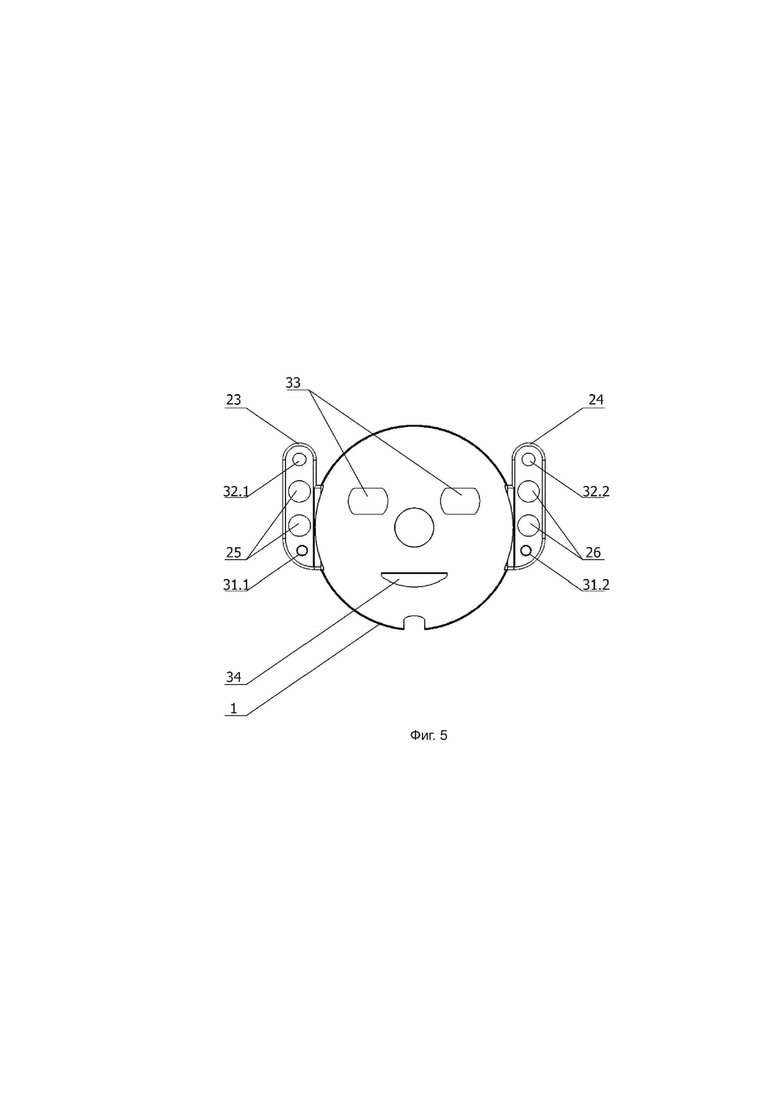
фиг. 5 - Схема примера размещения элементов индикации;
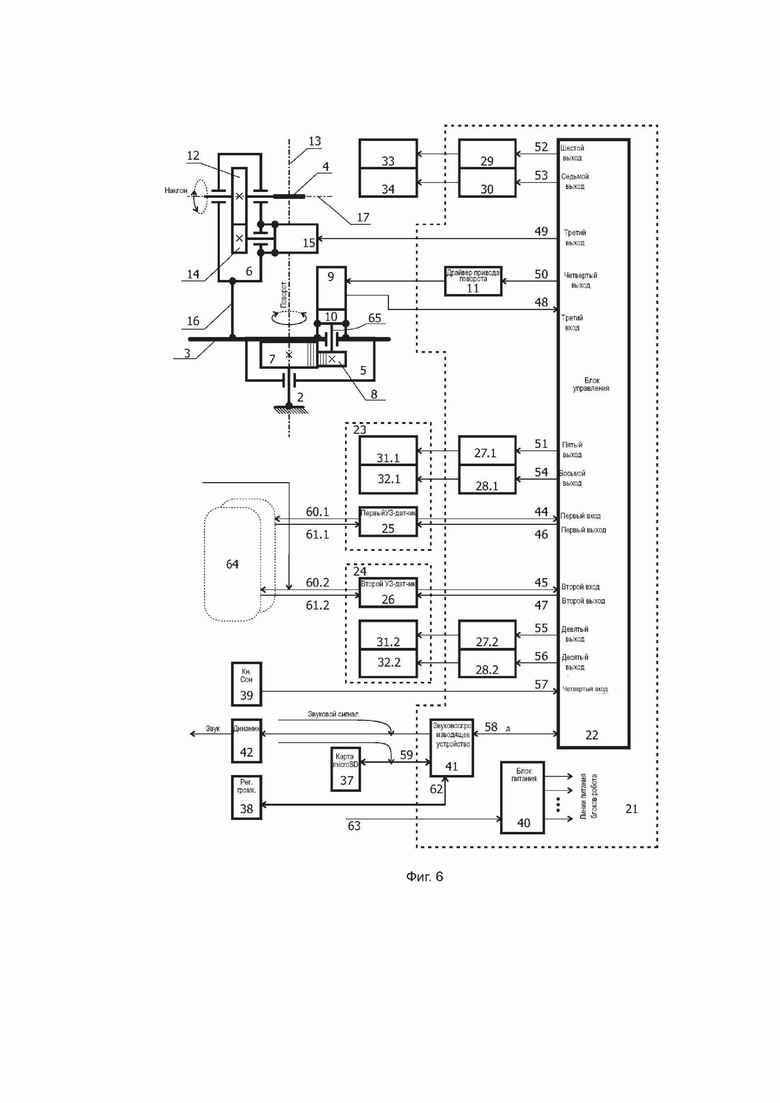
фиг. 6 - блок-схема робота;
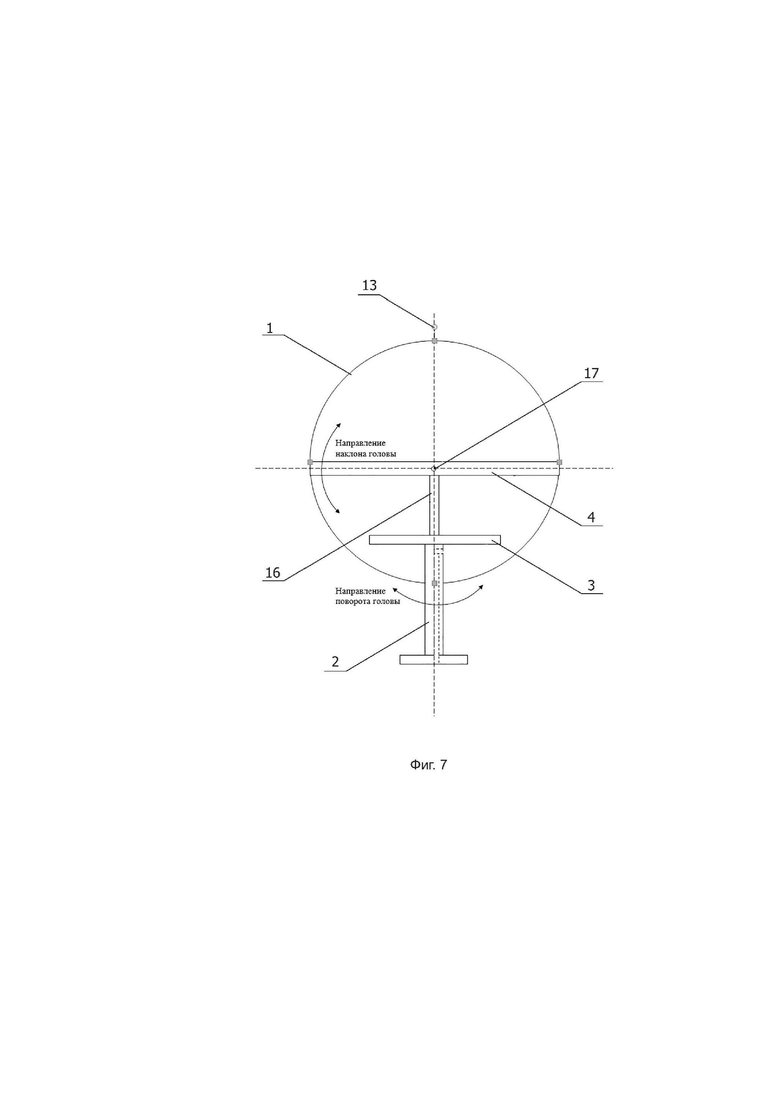
фиг. 7 - схема движений головы.
Перечень позиций
1 - корпус робота в виде головы;
2 - стойка робота;
3 - поворотная платформа (с механизмом поворота);
4 - наклонная платформа (с механизмом наклона);
5 - механизм поворота головы вправо и влево;
6 - механизм наклона головы;
7 - зубчатое колесо механизма поворота головы;
8 - зубчатая шестерня механизма поворота головы;
9 - привод поворота головы;
10 - редуктор привода поворота головы
11 - драйвер управления приводом поворота головы;
12 - половинное зубчатое колесо механизма наклона головы
13 - ось вращения поворотной платформы/ось поворота головы;
14 - зубчатая шестерня механизма наклона головы;
15 - привод механизма наклона головы;
16 - вертикальные стойки крепления второй платформы;
17 - ось поворота второй платформы на стойках 16 /ось наклона головы;
18 - стойка крепления половинного зубчатого колеса;
19 - крепление лицевой части корпуса к второй платформе;
20 - крепление затылочной части корпуса к второй платформе;
21 - печатная плата;
22 - блок управления (БУ);
23 - первый блок УЗ-датчика;
24 - второй блок УЗ-датчика;
25 - первый УЗ-датчик;
26 - второй УЗ-датчик;
27.1 - драйвер световой индикации состояния первого УЗ-датчика ;
27.2 - драйвер световой индикации состояния второго УЗ-датчика;
28.1 - драйвер световой индикации обнаружения объекта первым УЗ-датчиком;
28.2 - драйвер световой индикации обнаружения объекта вторым УЗ-датчиком;
29 - драйвер имитации моргания глазами второй драйвер светодиодов;
30 - драйвер имитации движения губ, открывания-закрывания рта;
31.1 - первый элемент индикации УЗ-датчиков;
31.2 - второй элемент индикации УЗ-датчиков;
32.1 - первый элемент индикации обнаружения объекта;
32.2 - второй элемент индикации обнаружения объекта;
33 - блок индикации моргания глаз;
34 - блок индикации движения губ, открывания-закрывания рта;
35 - крепежный выступ;
36 - крепежный элемент затылочной части корпуса;
37 - карта microSD памяти со звуковыми файлами;
38 - регулятор громкости;
39 - кнопка «Сон»;
40 - блок питания;
41 - звуковоспроизводящее устройство;
42 - динамик;
43 - отверстие для кабеля в стойке
44 - первый вход БУ1;
45 - второй вход БУ1;
46 - первый выход БУ1;
47 - второй выход БУ1;
48 - третий вход БУ1;
49 - третий выход БУ1;
50 - четвертый выход БУ1;
51 - пятый выход БУ1;
52 - шестой выход БУ1;
53 - седьмой выход БУ1;
54 - восьмой выход БУ1;
55 - девятый выход БУ1;
56 - десятый выход БУ1;
57 - четвертый вход БУ1;
58 - первый вход-выход ЗВУ 3;
59 - второй вход-выход ЗВУ 3- разъем для карты microSD;
60.1 - акустические колебания, излучаемые первым УЗ-датчиком 25;
60.2 - акустические колебания, излучаемые вторым УЗ-датчиком 26;
61.1 - отраженные акустические колебания первого УЗ-датчика 25;
61.2 - отраженные акустические колебания второго УЗ-датчика 26;
62 - третий вход-выход ЗВУ;
63 - кабель питания;
64 - объект;
65 - вал редуктора привода поворота.
Осуществление изобретения.
Конкретный вариант осуществления робота в виде головы в соответствии с настоящим изобретением будет подробно описан со ссылкой на прилагаемые чертежи.
Заявляемый робот представляет собой автоматическое электронно-механическое устройство с микропроцессорным управлением и ультразвуковыми датчиками слежения, который действует по заранее записанной в его блок управления программе, с учетом наличия и положения внешних объектов относительно него.
Основное назначение заявляемого устройства обнаруживать как движущийся объект, так и статический, в пределах заданного расстояния, «обращаться» к обнаруженному посетителю, не зависимо от того, стоит он перед роботом или движется;
выдавать конкретному посетителю или группе посетителей, по заранее заложенной программе, необходимую информацию (развлекательного, информационного, рекламного характера) в человеко-восприимчивом, визуализировано-звуковом формате. Кроме того, заявляемый робот может выполнять функционал охранно-наблюдательного характера, реагируя на появление посетителя в определённой зоне привлекая внимание обслуживающего персонала, кроме того, это дает понять посетителю, что он находится под наблюдением.
Робот (фиг. 1) содержит объемный, предпочтительно сферический, корпус в виде головы 1, выполненной с лицевой и затылочной частями. В дальнейшем в описании возможно использование как термина «голова», так и термина «корпус», что относится к одному и тому же признаку: «корпус робота в виде головы».
Корпус может быть выполнен как в виде головы, имитирующей голову человека, так и головы иного существа (возможны различные варианты оформления), способной выполнять горизонтальные повороты и вертикальные наклоны, имитировать моргание глазами, имитировать движения губ и открывание-закрывание рта в соответствии с воспроизводимыми звуками, записанными в его память на сменном носителе.
Корпус является пустотелым, что позволяет разместить внутри него все механическое и электронное оборудование.
Основанием робота, служит вертикальная стойка 2, имеющая внутри канал для укладки в него кабелей от внешнего источника питания, например, от бытовой сети переменного тока 220 В. Стойка может быть выполнена в виде трубы или фигурной формы, как это показано на фиг. 2, 4.
На стойке установлены поворотная платформа 3 с механизмом 5 поворота головы вправо и влево и наклонная платформа 4 с механизмом 6 наклона головы (фиг. 6), которые с помощью механических связей, соединены между собой и с головой 1 робота.
Сверху на стойке 2 (фиг. 4) подвижно, с возможностью вращения вокруг центральной вертикальной оси 13, закреплена поворотная платформа 3, выполненная в виде плоского диска, на которой закреплен механизм поворота головы вправо и влево.
Механизм 5 поворота головы представляет собой горизонтальную зубчатую передачу (фиг.3), состоящую из зубчатого колеса 7 и зубчатой шестерни 8, управляемой приводом 9. Привод 9 механизма 5 поворота головы содержит двигатель, соединенный с редуктором 10, и способен поворачивать голову на угол не менее 200 градусов: 100 градусов вправо и 100 градусов влево относительно исходного положения. В качестве привода может быть использован, например коллекторный двигатель постоянного тока (https://innodrive.ru/articles/kollektornyy-dvigatel/. Опубликовано 26.03.2021).
Зубчатое колесо 7 механизма 5 поворота головы жестко закреплено в верхней части стойки 2, под поворотной платформой 3, и входит в зацепление с шестерней 8, установленной на валу 65 редуктора 10 привода 9 поворота головы. Вал 65 редуктора пропущен через канал в поворотной платформе 3, а зубчатая шестерня 8 установлена на его конце с возможностью зацепления с зубчатым колесом 7 (фиг. 6).
Ось зубчатого колеса 7 расположена параллельно оси шестерни 8 и совпадает с вертикальной осью 13 стойки 2. Зубчатое колесо 7 всегда остается неподвижным относительно стойки 2. Зубчатая шестерня 8 при своем вращении вокруг зубчатого колеса ведет за собой и вал 65 редуктора 10, на котором установлена, и соответственно, привод 9, который жестко установлен на поворотной платформе, и поворачивает первую платформу 3 вокруг вертикальной оси.
Для управления мотором редуктора 10 привода механизма поворота головы применен драйвер 11 управления коллекторными двигателями, выполненный, например, на микросхеме L293D (https://www.chipdip.ru/product/l293d, опубликовано 26.01.2013 г.), установленный на плате 21 управления (фиг.6).
Наклон головы осуществляется механизмом 6 наклона головы, который представляет собой вертикальную зубчатую передачу (фиг. 1, 2, 4), состоящую из половинного зубчатого колеса 12, и шестерни 14.
Механизм 6 наклона головы способен наклонять голову 1 вперед и возвращать ее в исходное вертикальное положение.
На поворотной платформе 3 (фиг. 6) жестко закреплен привод 15 механизма наклона головы, в качестве которого может быть использован сервопривод SG90 микро. (https://mcustore.ru/store/privody-mexanika/mikro-servoprivod-sg90/?yclid=4700958081818067824/ . Опубликовано 30.08.2015) для обеспечения возможности плавного наклона головы, без рывков, и с возможностью выполнения наклона головы одновременно с ее поворотом.
На оси сервопривода 15 закреплена зубчатая шестерня 14, которая входит в соединение с половинным зубчатым колесом 12 (фиг. 6).
Кроме того, на поворотной платформе 3 закреплены две вертикальные стойки 16, на которых подвижно установлена наклонная платформа 4 с возможностью ее наклона относительно поворотной платформы 3, т.е. относительно горизонтальной плоскости. Вертикальные стойки 16 выполняют функцию механической связи между механизмами поворота 5 и наклона 6.
Наклонная платформа 4 крепится к стойкам 16 с помощью оси или двух полуосей 17, проходящих через отверстия в верхних частях стоек 16, образуя при этом подвижное соединение, позволяющее наклонной платформе 4 совершать наклоны относительно поворотной платформы (фиг. 3, 4, 6).
На наклонной платформе 4, на нижней ее поверхности, с помощью фиксирующей стойки 18 жестко закреплено половинное зубчатое колесо 12, образующее вместе с шестерней 14 зубчатую передачу- механизм 6 наклона головы (фиг. 1, 4).
Наклонная платформа 4 представляет собой плоский диск, который свободно наклоняется на оси 17 в стойках 16 в вертикальной плоскости. Когда ось сервопривода 15 начинает вращаться, вращается и зубчатая шестерня 14, поворачивая в вертикальной плоскости половинное зубчатое колесо 12, вместе с которым наклоняется и жестко связанная с ним наклонная платформа 4.
Наклонная платформа 4 установлена по диаметру сферы-головы. На вторую платформу 4 с помощью механических связей крепится корпус 1, представляющий собой две смыкающиеся полусферы, лицевую и затылочную. Крепление корпуса может быть выполнено следующим образом (фиг.1). Внутри корпуса, со стороны лицевой части выполнено крепление 19 в виде выступов с прорезью, в прорези вставляется диск наклонной платформы 4, таким образом лицевая часть корпуса просто надевается на наклонную платформу 4. Затылочная часть корпуса 1 крепится к наклонной платформе 4 креплением 20, состоящим из выступа 35 с резьбовым отверстием на нижней поверхности наклонной платформы и крепежного элемента 36, например, винта. Голова в сборе имеет сферическую форму, и одного крепежного элемента, например, винта, достаточно, для обеспечения прочности всей конструкции головы, поскольку он стягивает две полусферы между собой через наклонную платформу 4.
Крепления 19 и 20 выполняют функцию механической связи между корпусом головы и механизмами поворота 5 и наклона 6.
Таким образом, механизмы поворота 5 и наклона 6 соединены с корпусом головы 1 робота с помощью механических связей.
Поскольку центр наклонной платформы 4, образованный пересечением центральной оси 13 вращения и оси наклона 17 является геометрическим центром всей конструкции, в том числе и центром сферической головы (фиг. 7), то центр тяжести всей конструкции всегда совпадает с центром вращения и наклона, а значит всегда остается на одном месте, как при вращении головы, так и при ее наклоне, что делает всю конструкцию очень устойчивой и именно по этой причине не требует массивной и крепкой стойки и особым требованиям к месту для установки всей конструкции.
Сверху на наклонной платформе 4 установлен блок 22 управления, выполненный на печатной плате 21 с электронными компонентами (фиг.1, 6).
Таким образом, наклонная 4 и поворотная 3 платформы с механизмами наклона 6, поворота 5 и печатная плата 21 с электронными элементами размещены в полости головы 1, и не видны снаружи.
Наличие единого корпуса, в который заключены все функциональные элементы, улучшает эксплуатационную надежность и эстетический вид устройства.
Снаружи на корпусе 1 (фиг.5), по его боковым сторонам, на первой стороне, например, слева, и на второй стороне, например, справа, располагаются блоки 23, 24 ультразвуковых датчиков (далее- УЗ-датчики), каждый из которых содержит первый 25 УЗ-датчик или второй 26 УЗ-датчик, соответственно, первый 31.1 и наклонной 31.2 элементы световой индикации УЗ-датчиков и первый 32.1 и второй 32.2 элементы световой индикации фиксации объекта.
На лицевой стороне головы располагаются блоки светодиодов 33 имитации моргания глаз и блоки светодиодов 34 имитации открывания-закрывания рта и движения губ.
Вся световая индикация состояния робота выполнена в виде светодиодов.
В качестве датчиков 25, 26 обнаружения объекта применены два ультразвуковых дальномера, например ультразвуковой датчик HC-SR04 (http://wiki.amperka.ru/%D0%BF%D1%80%D0%BE%D0%B4%D1%83%D0%BA%D1%82%D1%8B:hc-sr04-ultrasonic-sensor-distance-module. Опубликовано 18.08.2017. Приложение 1).
Ультразвуковой дальномер HC SR04 имеет следующие технические параметры:
Питающее напряжение 5В;
Рабочий параметр силы тока - 15 мА;
Сила тока в пассивном состоянии < 2 мА;
Обзорный угол - 15°; (имеется ввиду в любую сторону от центра)
Сенсорное разрешение - 0,3 см;
Измерительный угол - 30°;
Ширина импульса - 10-6 с.
Модуль датчика HC-SR04 содержит ресивер и трансмиттер (Приложение 1).
Работа ультразвукового дальномера основана на использовании отражения ультразвуковых волн от препятствия, что позволяет обнаруживать как движущийся объект, так и статический объект. У ультразвуковых дальномеров угол обзора до 15 градусов, что позволяет им более точно позиционироваться на объекте. Таким образом, ультразвуковые дальномеры в заявляемом роботе определяют не положение робота, а положение внешнего объекта относительно робота, позволяя ему следить за объектом. В существующих роботах, где используются подобные дальномеры, как правило используется лишь один дальномер, и он применяется для определения расстояния до препятствия и положения самого робота.
Робот содержит звуковоспроизводящее устройство (далее- ЗВУ) 41 в виде готового модуля, например, MP3 TF (https://mysku.ru/blog/aliexpress/50345.html. Опубликовано 17.03.2017). Это законченный типовой модуль, содержащий разъем 59 для подключения USB флеш-накопителя 37 с записанными звуковыми файлами в формате MP3. Звуковоспроизводящее устройство 41 включает в свой состав усилитель звука и соединен с динамиком 42.
В стойке 2 робота выполнено отверстие 43 для размещения в нем кабеля 63 от внешнего источника питания к элементам управления.
Сама стойка 2 нижней частью крепится к месту установки корпуса, например, на подставку, стол, тумбу, кронштейн и т.д. На месте крепления, при необходимости, может быть установлена кнопка 39 включения/выключения режима «Сон» и, при необходимости, регулятор громкости 38.
Элементы управления роботом (фиг. 1, 6) выполнены на печатной плате 21, расположенной на поверхности наклонной платформы 4 и содержат: блок 22 управления, в качестве которого может быть применена микро-ЭВМ, например ArduinoProMini (https://arduinomaster.ru/platy-arduino/arduino-pro-mini-raspinovka-i-podklyuchenie/. Опубликовано 28.02.2019); драйверы управления состоянием робота: драйверы 27.1, 27.2 световой индикации состояния, соответственно, первого УЗ-датчика 25 и второго УЗ-датчика 26; драйверы 28.1, 28.2 световой индикации обнаружения объекта УЗ-датчиками 25 и 26 ; драйвер 29 имитации моргания глаз; драйвер 30 имитации движения губ, рта; звуковоспроизводящее устройство 41 и блок питания 40.
Драйвер 11 управления приводом 9 поворота головы также расположен на печатной плате 21.
Блок 22 управления выполнен с возможностью выдачи управляющих команд на подключенные к нему приводы механизмов поворота 5 и наклона 6 , а именно:
третий выход 49 БУ 22 связан с входом привода 15 механизма наклона , четвертый выход 50 БУ 22 связан с входом привода 9 поворота через драйвер 11.
Блок 22 управления связан своим первым входом 44 и первым выходом 46 с первым УЗ-датчиком 25, а вторым входом 45 и вторым выходом 47 - со вторым УЗ-датчиком 26 с возможностью формирования управляющих команд на своих первом 46 и втором 47 выходах управления, подключенных соответственно к управляющим входам первого 25 и второго 26 УЗ-датчиков. Первый 25 и наклонной 26 УЗ-датчики выполнены с возможностью излучения в заданных направлениях окружающего пространства, по командам, поступающим на их управляющие входы, акустических колебаний 60.1 и 60.2, соответственно, в ультразвуковом диапазоне, имеющих форму импульсов длительностью 200 мкс, которые заполнены синусоидальными колебаниями частотой 40 КГц. При этом первым УЗ-датчиком 25 акустические колебания 60.1 излучаются с первой боковой стороны пространства перед головой 1, а вторым УЗ-датчиком 26 акустические колебания 60.2 излучаются со второй боковой стороны пространства перед головой 1 заявляемого робота. Период следования излучаемых импульсов порядка 50 мс. При этом, при наличии вблизи первой боковой стороны и/или второй боковой стороны головы 1 объектов 64, достигающие их акустические колебания 60.1 и 60.2 отражаются от их поверхностей в виде акустических колебаний 61.1 и 61.2.
Первый 25 и второй 26 УЗ-датчики выполнены с возможностью улавливать и обрабатывать отраженные акустические колебания 61.1 и 61.2. Результаты обработки с их информационных выходов поступают на подключенные к этим выходам первый 44 и второй 45 входы блока 22 управления.
Блок 22 управления, выполнен с возможностью формирования управляющих команд на своих пятом 51, шестом 52, седьмом 53, восьмом 54, девятом 55, десятом 56 выходах, подключенных к входам драйверов управления светодиодами; при этом шестой выход 52 БУ 22 подключен к входу драйвера 29 светодиодов блока индикации движения глаз; седьмой выход 53 БУ 22 подключен к входу драйвера 30 светодиодов блока индикации движения губ, рта; пятый выход 51 БУ 22 подключен к входу драйвера 27.1 светодиодов блока индикации первого УЗ- датчика 25; восьмой выход 54 БУ 22 подключен к входу драйвера 28.1 светодиодов блока индикации обнаружения объекта первым УЗ-датчиком 25; девятый выход 55 БУ 22 подключен к входу драйвера 27.2 светодиодов блока индикации второго УЗ- датчика 26; десятый выход 56 БУ 22 подключен к входу драйвера 28.2 светодиодов блока индикации обнаружения объекта вторым УЗ- датчиком 26.
Блок 22 управления своим входом-выходом подключен к первому входу/выходу звуковоспроизводящего устройства 41, второй вход/выход 59 которого представляет собой разъемное соединение с возможностью подключения сменного носителя- карты 37 microSD, содержащей звуковые файлы, например в формате MP3, третий вход-выход 62 подключен к регулятору 38 громкости, а выход подключен к динамику 42.
Блок 22 управления своим четвертым входом 57 соединен с кнопкой 39 «Сон».
Устройство содержит блок питания 40, смонтированный на печатной плате 21.
Питание устройства низковольтное, 9-12 вольт, поступает по кабелю 63 питания от сетевого адаптера, например блок питания (сетевой адаптер) универсальный Live-Power12V2A (5.5x2.5 мм)(https://market.yandex.ru/product--blok-pitaniia-setevoi-adapter-universalnyi-live-power-12v-2a-5-5x2-5-mm/867324251?text=Адаптер%20питания%2012V&cpc. Опубликовано 4.06.2021) от бытовой сети 220 В.
Работа.
Работа заявляемого робота поясняется схемой на фиг. 6.
Внешнее управление роботом осуществляется с помощью кнопки 39 «Сон» и при необходимости - регулятора громкости звука 38.
В процессе работы УЗ-датчики 25 и 26 сканируют пространство перед головой робота. Сигналы с датчиков 25 и 26 постоянно считываются блоком 22 управления.
Поворот головы осуществляется по сигналу от блока управления драйверу 11 управления поворотом головы, в свою очередь направляющему команду приводу 9 поворота головы, приводящего в движение механизм поворота 5 в виде горизонтальной зубчатой передачи, приводящей во вращение первую платформу 3 и соединенную с ней механическими связями наклонную платформу 4, и закрепленную на ней голову 1 робота.
Наклон головы осуществляется по сигналу от блока управления 22 приводу механизма 6 наклона, приводящему в движение механизм 6 наклона головы в виде вертикальной зубчатой передачи, осуществляющей наклон наклонной платформы 4 и, соответственно, наклон вперед закрепленной на ней головы робота и возврат в исходное положение.
Робот выполнен с возможностью воспроизводить фразы, записанные на сменном носителе 37.
Имитация движения рта (открывания-закрывания) происходит по сигналу от седьмого выхода 53 блока 22 управления на драйвер 30 светодиодов и от драйвера 30 на блок светодиодов 34 имитации открывания-закрывания рьа.
Имитация моргания глазами происходит по сигналу от шестого 52 выхода блока управления 22 на драйвер 29 светодиодов и от драйвера 29 на блок светодиодов 33 имитации моргания глазами.
Робот может находиться в трех состояниях: сон, ожидание, работа.
Режим сон. В режиме сон робот находится в неподвижном состоянии, с наклоненной вперед головой, и изредка моргающими глазами. Робот не реагирует на появление объекта. Режим используется для временного отключения робота с помощью кнопки 39 «Сон».
При включении питания робот проходит самодиагностику по записанной в памяти микро-ЭВМ блока управления 22 программе, устанавливая голову в центральное, исходное положение, если оно до этого не было таким, поднимает и опускает голову, включает и выключает световую индикацию (глаза и прочие световые индикаторы). Если диагностика прошла удовлетворительно, робот поднимает голову и произносит запрограммированную фразу, например, представляется: «Меня зовут «Макс», и после паузы не более одной минуты, опускает голову и переходит в режим ожидания.
Режим ожидания.
Голова ориентирована по центру и опущена. В режиме ожидания робот с помощью двух ультразвуковых датчиков 25, 26 следит за окружающей обстановкой, при этом он неподвижен, но производит имитацию моргания глазами светодиодами 33, находясь в таком состоянии до момента появления перед ним объекта 64 (посетителя). В режиме ожидания ультразвуковые датчики 25, 26 излучают в заданных направлениях окружающего пространства акустические колебания 60.1, 60.2 в ультразвуковом диапазоне, частотой 40 КГц. Акустические колебания излучаются первым УЗ-датчиком 25 с одной, например, левой стороны пространства перед головой, а с другой, например, правой стороны пространства, излучаются вторым УЗ-датчиком 26 перед головой. Период следования излучаемых импульсов порядка 50 мс.
Режим работы.
Как только перед роботом появляется объект-посетитель 64, ультразвуковые датчики первый 25 и второй 26 , выполненные с возможностью улавливать и обрабатывать отраженные акустические колебания 61.1, 61.2, улавливают его присутствие, и формируют на своих выходах информацию о расстоянии до объекта 64. Результаты обработки поступают с их информационных выходов на подключенные к этим выходам первый 44 и второй 45 входы блока 22 управления. Блок управления, считав эти сигналы, согласно алгоритму, заложенному в программное обеспечение микро-ЭВМ блока управления, подает команду на привод 9 механизма поворота и привод 15 механизма наклона головы. Причем в зависимости от расстояния и положения объекта, изменяется скорость работы моторов привода и направления их вращения. Таким образом, происходит «слежение» за объектом.
Робот поднимает голову и приветствует посетителя запрограммированной фразой, например: «Добрый день, меня зовут Макс», при этом светодиодами 34 происходит имитация открывания-закрывания рта; светодиодами 33 происходит имитация моргания глазами.
Далее, благодаря двум УЗ-датчикам 25, 26 определяется положение объекта, и если объект перемещается, то блок управления 22 робота, подает команду драйверу 11, с помощью механизма поворота робот поворачивает голову в сторону объекта, как бы «наблюдая» за ним.
При попадании объекта в зону действия УЗ- датчика (первого 25 или второго 26), это подтверждается загоранием соответствующей светодиодной индикации 31.1 или 31.2. Когда же оба УЗ-датчика одновременно фиксируют наличие объекта, то гаснут светодиоды 31.1 или 31.2. и загораются светодиоды фиксации объекта 32.1 и 32.2, что свидетельствует о том, что объект зафиксирован и робот «смотрит» прямо на него.
Кроме того, при появлении объекта 64 с входа-выхода блока 22 управления поступает команда в звуковоспроизводящее устройство 41 воспроизвести звуковой файл «приветствие», а на драйвер 30 - команда для блока светодиодов 34 открывания-закрывания рта. Звук воспроизводится динамиком 42 и сопровождается имитацией открывания-закрывания рта светодиодами 34. При необходимости возможно увеличить громкость регулятором 38 громкости, например, вручную.
Пока объект находится в зоне видимости, голова находится в поднятом состоянии и поворачивается в сторону перемещения объекта 64.
При этом через заданное время блок 22 управления подает команду звуковоспроизводящему устройству (ЗВУ) 41 воспроизвести определенный звуковой файл с полезной информацией. Робот с заданной периодичностью воспроизводит записанный на носителе 37 соответствующий звуковой файл.
При этом по сигналам с шестого 53 выхода блока 22 управления на драйвер 30 блока световой индикации движения губ/рта, происходит включение группы светодиодов блока 34, происходит имитация открывания и закрывания рта.
Если объект потерян, то робот пытается его найти, опуская и поднимая голову по сигналам от третьего выхода 49 блока 22 управления приводом 15 механизма 6 наклона головы.
При обнаружении объекта робот продолжает режим работы. Блоком 22 управления дается команда на поднятие головы и продолжение слежения с последующим поворотом головы и воспроизведением звуковых файлов.
Если объект удалился на расстояние, превышающее запрограммированное, то блок управления 22 подает команду в ЗВУ 41 воспроизвести фразу «прощание», а также подает команды приводам 15 и 9 механизма 6 наклона и механизма 5 поворота повернуть голову в центральное положение и затем опустить ее.
Робот после запрограммированной паузы, произносит записанную на сменном носителе 37 фразу, например: «До новых встреч», как бы прощаясь с посетителем. После чего опускает голову.
Робот переходит в режим ожидания. Первый и второй УЗ-датчики 25, 26 продолжают сканировать пространство перед головой до следующего появления объекта.
В режиме «Сон» блок управления игнорирует любые сигналы от УЗ -датчиков 25 и 26, и голова наклонена и находится в опущенном состоянии, но робот при этом остается включенным.
Использование двух ультразвуковых дальномеров, разнесенных в пространстве по обеим сторонам головы, дает следующие преимущества:
позволяют роботу наблюдать за положением объекта, например, с какой стороны от робота находится объект;
позволяет определять как движущийся объект, так и статический, позволяет «обращаться» к посетителю, не зависимо, стоит он перед роботом или движется в пределах заданного расстояния;
позволяет определять расстояние до объекта, что является важным для обеспечения плавности движений и правдоподобности эффекта слежения. При слежении за объектом скорость поворота головы робота должна быть различной при различном расстоянии до движущегося посетителя. Чем дальше объект от робота, тем нужна медленнее скорость поворота головы, чтобы следить за ним. Чем ближе объект находится к роботу, тем больше должна быть угловая скорость поворота головы робота;
позволяет не только определять расстояние и направление движения объекта, но и следить за положением объекта в пространстве при его перемещении. Т.е. заявляемый робот будет постоянно наблюдать за объектом (посетителем), поворачиваясь в ту сторону, в какую он перемещается. У посетителя будет создаваться иллюзия, что робот все время «смотрит» на него и обращается именно к нему.
Блок управления получает данные от ультразвуковых дальномеров о расстоянии до объекта, что дает возможность настраивать расстояние, с которого объект будет считаться в «поле зрения» робота, другими словами, можно настраивать «чувствительность». Можно настроить расстояние обнаружения объекта в зависимости от размера комнаты, чтобы исключить ложные срабатывания или наоборот максимально охватить нужный сегмент комнаты, чего нет в известных технических решениях.
Воспроизведение звуковых фраз роботом совместно с соответствующими движениями головы и имитацией моргания глаз, движения рта повышает эффект «одушевленности», «дружественности» робота.
Промышленная применимость
Заявляемый робот может быть изготовлен на промышленных предприятиях с помощью известных технических средств и электронных компонентов.
Сферой применения заявляемого робота могут быть следующие области:
реклама: Привлечение внимания, для увеличения продаж; реклама товаров, услуг.
Информирование о проводимых акциях, скидках. Информирование о наличии, составе и характеристиках продуктов или услуг.
Развлечение: Развлечение клиентов, организация их краткосрочного досуга и привлечение внимания. Развлечение детей в дошкольных учреждениях и группах дополнительной подготовки.
Обучение: Обучение в веселой, ненавязчивой форме. Например, в дошкольных учебных центрах и детских садах.
Охрана: Привлечение внимание персонала, при неожиданном появлении посетителей в зоне обзора устройства.
Источники информации
1. Патент на полезную модель РФ № 195261 Проекционный антропоморфный робот "РобоКлон"с возможностью биоуправления. Заявка: 2019124137; МПК B25J 11/00. Патентообладатель: Общество с ограниченной ответственностью "НейроАс" (RU). Опубликовано: 21.01.2020 .
2. Патент KR 102173194 Голова манекена, принимающая гостя. Заявка KR 20190120256; МПК G09F19/08. Заявитель KIMBAEKUN [KR]. Опубликовано 02.11.2020.
3. Патент KR 20060107449 Робот-манекен. Заявка № KR20060086907. МПК G09F 19/00; G09F19/08. Заявитель SHINDONGJU [KR]. Опубликовано 13.10.2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система подвижной мишени и подвижная мишень | 2019 |
|
RU2737610C1 |
| Рыбка-робот | 2020 |
|
RU2734380C1 |
| Система централизованного освещения производственных помещений и сооружений с большой световой нагрузкой | 2019 |
|
RU2729476C1 |
| Звуковоспроизводящая робототехническая конструкция "Морской Царь" | 2024 |
|
RU2830330C1 |
| ТРЕНАЖЕР (ВАРИАНТЫ) | 2000 |
|
RU2201783C2 |
| Роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты | 2018 |
|
RU2699356C1 |
| ПАНОРАМНЫЙ ИГРОВОЙ АТТРАКЦИОН | 2013 |
|
RU2552862C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| Система определения препятствий движению робота | 2019 |
|
RU2709523C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
Заявляемое изобретение относится к роботам в виде головы и может быть использовано в рекламных, охранных, развлекательных, образовательных целях. Информационно-развлекательный робот содержит блок управления, корпус в виде головы, выполненной с центральной и затылочной частями, установленный на стойке с возможностью поворота головы вправо и влево и наклона головы вперед. На стойке установлена поворотная платформа с механизмом поворота головы вправо и влево и наклонная платформа с механизмом наклона головы, расположенные внутри корпуса головы и с помощью механических связей, соединенные между собой и с головой робота. Робот содержит два ультразвуковых датчика, размещенных снаружи, на боковых поверхностях головы, и элементы световой индикации состояния робота, расположенные на боковых и лицевой поверхностях головы. Робот выполнен с возможностью изменения положения головы, выдачи речевых сообщений, записанных на сменном носителе, через звуковоспроизводящее устройство и имитации моргания глаз и открывания-закрывания рта элементами световой индикации по командам блока управления в ответ на полученные сигналы от ультразвуковых датчиков. Технический результат, достигаемый заявляемым изобретением, заключается в создании информационно-развлекательного робота, который может определять положения объектов относительно него и реагировать на появление и перемещение объектов путем поворота и/или наклона головы с выдачей световой индикации и речевых обращений по сигналам с блока управления, с сохранением устойчивости конструкции. 3 з.п. ф-лы, 7 ил.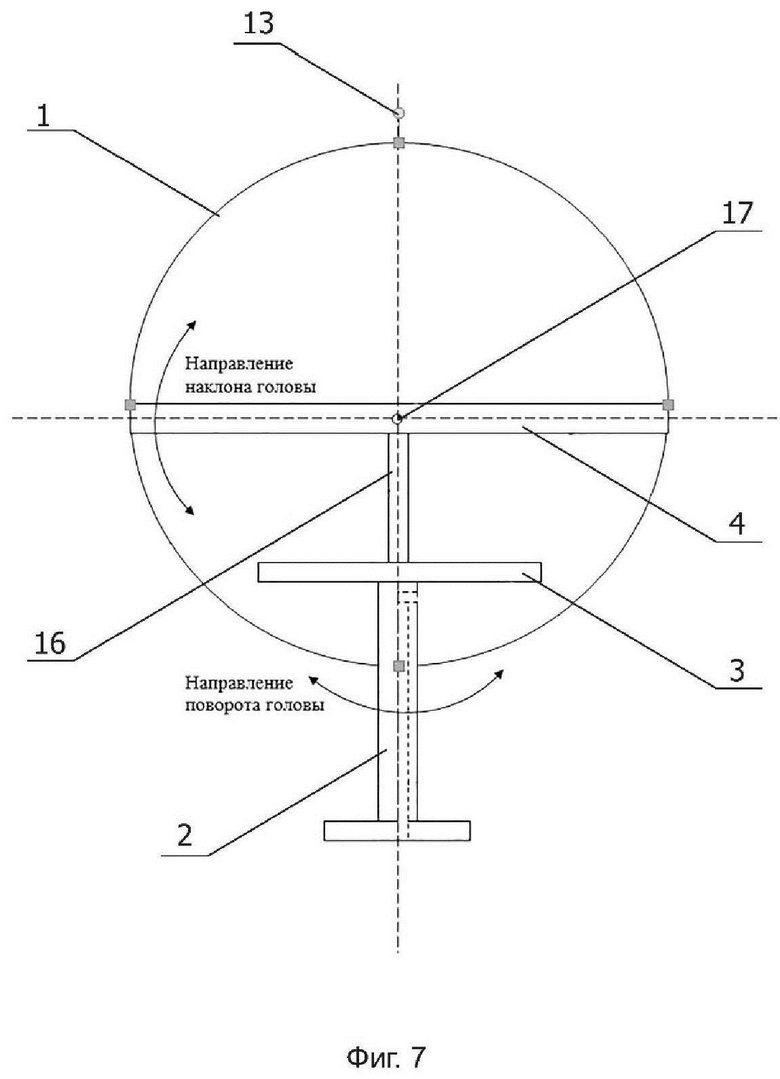
1. Информационно-развлекательный робот, содержащий блок управления, корпус в виде головы, выполненной с центральной и затылочной частями, установленный на стойке с возможностью поворота головы вправо и влево и наклона головы вперед, при этом на стойке установлена поворотная платформа с механизмом поворота головы вправо и влево и наклонная платформа с механизмом наклона головы, расположенные внутри корпуса головы и с помощью механических связей соединенные между собой и с головой робота; при этом робот содержит два ультразвуковых датчика, размещенных снаружи на боковых поверхностях головы, и элементы световой индикации состояния робота, расположенные на боковых и лицевой поверхностях головы, причем робот выполнен с возможностью изменения положения головы, выдачи речевых сообщений, записанных на сменном носителе, через звуковоспроизводящее устройство и имитации моргания глаз и открывания-закрывания рта элементами световой индикации по командам блока управления в ответ на полученные сигналы от ультразвуковых датчиков;
при этом механизм поворота головы содержит горизонтальную зубчатую передачу, состоящую из зубчатого колеса, закрепленного на стойке, и шестерни, закрепленной на валу редуктора привода поворота головы, причем привод закреплен сверху на поворотной платформе, а вал редуктора пропущен через канал в поворотной платформе и зубчатая шестерня установлена на его конце с зацеплением с зубчатым колесом, при этом привод поворота головы выполнен с возможностью получения управляющих сигналов от драйвера управления поворотом головы для приведения во вращение поворотной платформы и соединенной с ней механическими связями наклонной платформы с закрепленной на ней головой робота;
при этом механизм наклона головы выполнен на наклонной платформе, установленной на двух вертикальных стойках, закрепленных на поворотной платформе и на которых подвижно установлена наклонная платформа с возможностью наклона относительно поворотной платформы, при этом на нижней поверхности наклонной платформы жестко закреплено половинчатое зубчатое колесо, которое вместе с шестерней, установленной на оси привода механизма наклона головы, закрепленного на поворотной платформе, образует вертикальную зубчатую передачу механизма наклона головы, причем привод наклона головы выполнен с возможностью получения управляющих сигналов от блока управления для осуществления наклона наклонной платформы и вместе с ней головы.
2. Робот по п.1, отличающийся тем, что блок управления с элементами управления состоянием робота, включающими: драйвер управления поворотом головы; драйверы световой индикации состояния ультразвуковых датчиков, драйверы управления световой индикацией обнаружения объекта; драйвер управления имитацией движения глаз, драйвер управления имитацией открывания-закрывания рта, а также звуковоспроизводящее устройство, выполнены на печатной плате, расположенной на наклонной платформе.
3. Робот по п.1, отличающийся тем, что содержит звуковоспроизводящее устройство, к которому подключен сменный USB флеш-накопитель с записанными звуковыми файлами, при этом звуковоспроизводящее устройство соединено с динамиком и подключено к блоку управления с возможностью получения команды на воспроизведение определенного звукового файла, записанного на флеш-накопителе.
4. Робот по п.3, отличающийся тем, что к звуковоспроизводящему устройству подключен регулятор громкости.
| KR 1020060107449 A, 13.10.2006 | |||
| US 5052680 A1, 01.10.1991 | |||
| 0 |
|
SU195261A1 | |
| US 9174342 B2, 03.11.2015 | |||
| CN 206764788 U, 19.12.2017 | |||
| US 11213943 B2, 04.01.2022 | |||
| KR 102173194 B1, 02.11.2020. | |||

