Изобретение относится к медицине, более точно к медицинской технике и может быть использовано для мелкодисперсного распыления жидкостей в наноиндустрии, например для нанесения полимерных и лекарственных покрытий на медицинские импланты. В частности, изобретение может быть применено в технологии нанесения тонких полимерных покрытий, содержащих микродозы лекарственных веществ на поверхности сердечных клапанов и металлических стентов для ангиопластики.
Известны различные приемы по нанесению химико-терапевтических покрытий на поверхность имплантов. Среди них наиболее распространенными являются механические покрытия, газодисперсные покрытия, покрытия путем погружения в жидкость, покрытия, наносимые капельно-струйными устройствами, поляризационные покрытия, покрытия, наносимые электростатическим распылением и ультразвуком.
Капельно-струйный способ нанесения покрытий на импланты является сложным за счет использования сложного печатающего устройства (см. ЕР 1499450 В1 и патенте США 8359998 В2). Получение капель в этих устройствах размером в среднем 5-35 мкм приводит к закупорке капилляров, подающих жидкость. Кроме того, сложно обеспечить стерильность печатающего устройства.
Наиболее широкое применение получил метод ультразвукового (УЗ) распыления жидкостей на импланты, т.к. данный прием обладает рядом преимуществ, в первую очередь исправностью («бездефектностью») и равномерностью тонких слоев покрытий. Ультразвуковое нанесение покрытий осуществляется с помощью использования УЗ распылителей, имеющих различную конструкцию и создающих разную форму аэрозольной струи. Например, в патенте США. №2007/0031611 А1 описан УЗ распылитель, форма распыла аэрозольной струи которого обеспечивает равномерность покрытия. В данной разработке раствор подается через трубку на конец УЗ ультразвукового концентратора, который создает характерную форму распыла в перпендикулярном направлении к плоскости поверхности вращающегося вокруг продольной оси металлического стента.
В патенте США №2008/0093473 А1 описан распылитель, в который подаваемый по трубопроводу раствор проходит непосредственно через сквозной канал в УЗ распылителе. Это увеличивает риск закупорки канального отверстия в УЗ распылителе в связи с применением в растворах полимерного материала. УЗ распыление имеет неоспоримые преимущества в сравнении с капельно-струйным способом нанесения покрытия.
Однако, все известные технические решения не используют роботизированные и автоматизированных приемы нанесения покрытия, которые позволили бы сократить время обработки, повысить качество готовых изделий и снизить себестоимость продукции.
Техническим результатом заявленного изобретения является создание роботизированного комплекса для нанесения полимерных и лекарственных покрытий на импланты, обеспечивающего сокращение времени обработки, повышение качества готовых изделий и снижение себестоимости продукции.
Промышленные роботы позволяют производить больше продукции за меньшее время и существенно снижать количество брака. Точность механических движений и отличная воспроизводимость технологического процесса исключает случайных ошибок, тем самым улучшая качество продукта при увеличении производительности.
В связи с тем, что попадание микрочастиц на имплант при покрытии значительно ухудшает качество покрытия, использование промышленного робота в среде повышенного класса чистоты исключает влияние одного из самых интенсивных источников загрязнений - человека.
Этот технический результат достигается тем, что роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты, содержит камеру для нанесения полимерных и лекарственных покрытий, управляющий персональный компьютер, модуль аэрозольного распыления полимера с лекарственным средством, состоящий из платы управления, к которой подключены ультразвуковой генератор, газовый расходомер и дозатор жидкости, модуль позиционирования импланта, состоящий из робота манипулятора с подключенной к нему платой управления, модуль управления магазином имплантов, состоящий из магазина имплантов с подключенной к нему платой управления, модуль безопасности, состоящий из датчиков движения и открытия камеры, с выходом которых соединена индикаторная лампа, и модуля контроля, состоящего из блока удаленного контроля, баркод сканера, камеры высокого разрешения, тачскрин дисплея и кнопки экстренного останова, при этом входы/выходы блока удаленного контроля, тачскрин дисплея, плат управления модуля позиционирования импланта, модуля аэрозольного распыления и модуля управления магазином соединены с соответствующими выходами/входами управляющего персонального компьютера, а выходы датчиков движения, баркод сканера и камеры высокого разрешения подключены к соответствующим входам управляющего персонального компьютера, кнопка экстренного останова соединена с управляющими входами робота манипулятора, индикатора и плат управления модулем позиционирования импланта и модулем аэрозольного распыления.
В комплексе в качестве робота манипулятора может быть установлен 6-осевой высокоточный промышленный робот-манипулятор.
Камера для нанесения полимерных и лекарственных покрытий на импланты может быть выполнена в виде бокса с прозрачными стенками, выполненный с возможностью доступа в него оператора, и модуля позиционирования импланта и дозатора жидкости.
Магазин имплантов может быть выполнен в виде полой шестигранной призмы с открытым верхом, снабженной электрическим приводом для движения вокруг вертикальной оси, по центру каждой грани призмы выполнены посадочные желобки для размещения в них держателей имплантов.
Модуль аэрозольного распыления полимера с лекарственным средством, модуль позиционирования импланта, модуль управления магазином имплантов, модуль безопасности и модуль контроля связаны единой управляющей программой, установленной на ПК и управляемой через тачскрин (сенсорный монитор).
Изобретение поясняется следующими фигурами.
На фиг. 1 представлена функциональная схема предлагаемого роботизированного комплекса для нанесения полимерных и лекарственных покрытий на импланты;
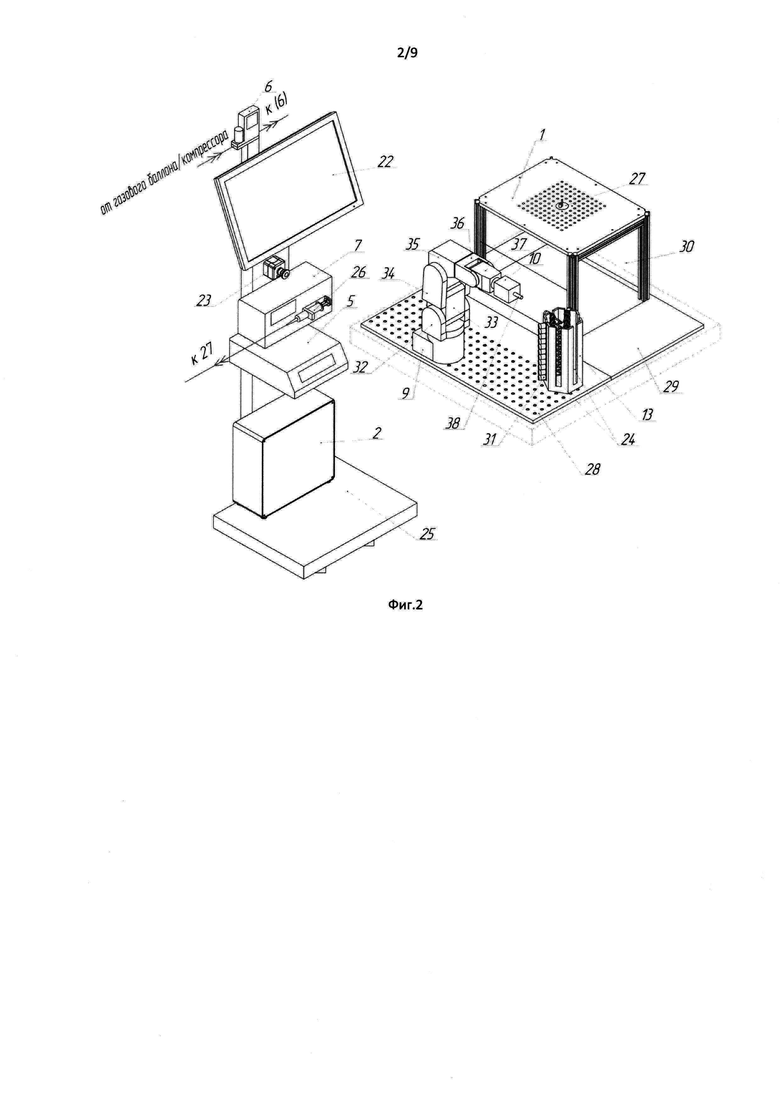
На фиг. 2 представлен общий вид предлагаемого роботизированного комплекса для нанесения полимерных и лекарственных покрытий на импланты;
На фиг. 3 показано окно основного меню, отображаемое на тачскрине при запуске модуля аэрозольного распыления полимера с лекарственным средством;
На фиг. 4 схематично показан робот-манипулятор в момент захвата держателя импланта в магазине;
На фиг. 5 показано конечное положение модуля позиционирования импланта;
На фиг. 6 стрелками показано направление движения робота-манипулятора в процессе нанесения полимерных и лекарственных покрытий;
На фиг. 7 показано перемещение робота-манипулятора после завершения процесса нанесения полимерных и лекарственных покрытий на импланты;
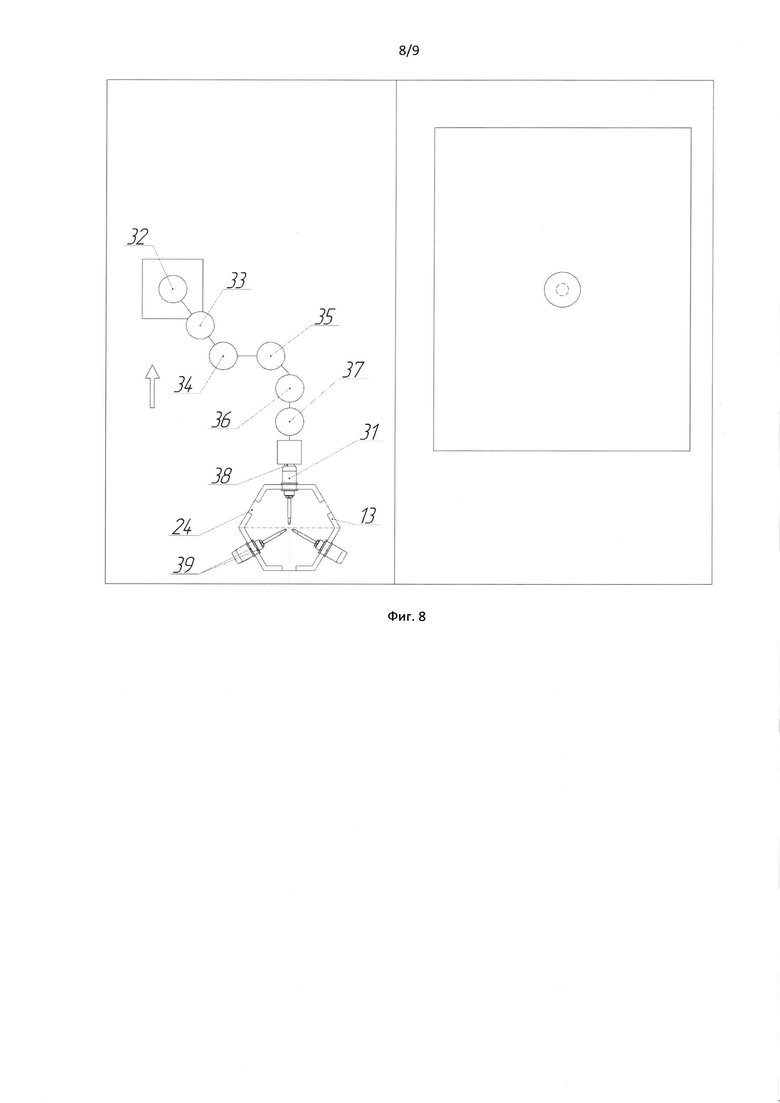
На фиг. 8 показан робот-манипулятор в момент процедуры укладки готового держателя импланта в желобок магазина имплантов.
На фиг. 9 представлена схема последовательности технологического процесса.
На указанных фигурах цифрами обозначены следующие элементы предлагаемого комплекса:
Камера 1 для нанесения полимерных и лекарственных покрытий, управляющий персональный компьютер 2, модуль 3 аэрозольного распыления полимера с лекарственным средством, состоящий из платы 4 управления, к которой подключены ультразвуковой генератор 5, газовый расходомер 6 и дозатор жидкости 7, модуль 8 позиционирования импланта, состоящий из робота манипулятора 9 и шагового двигателя 10 с подключенной к нему платой 11 управления, модуль 12 управления магазином имплантов, состоящий из магазина имплантов 13 с подключенной к нему платой 14 управления, модуль 15 безопасности, состоящий из датчиков 16 движения и открытия камеры, с выходом которых соединена индикаторная лампа 17, и модуля 18 контроля, состоящего из блока 19 удаленного контроля, баркод сканера 20, камеры 21 высокого разрешения, тачскрин дисплея 22 и кнопки 23 экстренного останова.
Камера 1 для нанесения полимерных и лекарственных покрытий может быть выполнена в виде бокса с прозрачными стенками.
Магазин имплантов 13 может быть выполнен в виде полой шестигранной призмы с открытым верхом, снабженной электрическим приводом для движения вокруг вертикальной оси, по центру каждой грани призмы выполнены посадочные желобки 24 для размещения в них держателей имплантов.
Предлагаемый комплекс УЗ распыления растворов позволяет покрывать твердые, мягкие импланты, биологические ткани, полимерные и металлические стенты различных размеров. Скорость распыляемой на имплант жидкости (растворов полимеров и лекарственных веществ с малой вязкостью) измеряется от 0,3 мл/мин и может контролироваться с высокой точностью. За одну рабочую смену комплекс может покрыть до 50 металлических стентов длиной 18 мм в зависимости от необходимой толщины покрытия. Комплекс позволит также с высокой точностью дозировать любой сжатый инертный газ (или воздух) в линию подачи газа-носителя.
Газ выступает в роли эффективного средства доставки аэрозольных частиц к поверхности импланта и применяется для того, чтобы преодолеть определенное расстояние от торца УЗ концентратора, с поверхности которого осуществляется распыление частиц, до поверхности вращающегося вокруг своей оси и перемещающегося в продольном направлении поверхности импланта за более короткий промежуток времени. Параметр скорости потока газа, измеряемый высокоточным газовым расходомером, становится важным параметром контролируемого процесса нанесения аэрозольного покрытия. При использовании механических кранов регулировки расхода газа наблюдается высокая погрешность при измерении скорости потока. Струя газа, выходящая с постоянной скоростью из газового тракта УЗ-распылителя подбирается таким образом, чтобы при нанесении покрытий обеспечивать наиболее плотный поток распыленных частиц аэрозоля на условную ед. площади поверхности. Важно также отметить, что точная регулировка скорости потока газа в заданном диапазоне зависит от выбранного диапазона скорости подачи раствора, но не может превышать пороговой величины (для данного типа УЗ распылителя).
Также отметим, что при толщине покрытий до 100 мкм скорость потока жидкости (раствора полимера и лек. вещества), подаваемого на торцевую поверхность УЗ-концентратора, с которой формируется аэрозольное облако, должна быть не высока и колеблется в диапазоне от 0,3 до 0,7 мл/час. В этом диапазоне скоростей подачи раствора происходит наиболее эффективное распыление и как результат более контролируемая толщина получаемого покрытия.
На фиг. 2 изображен роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты для осуществления способа. Комплекс содержит модуль контроля 18, расположенный на мобильной платформе 25 персональный компьютер 2 и модуль 18 контроля, состоящий из тачскрин дисплея 22, на который выводятся контролируемые параметры процесса. На платформе 25 также размещены дозатор жидкости 7, УЗ генератор 5 и высокоточный газовый расходомер 6, имеющие прямую и обратную связь с персональным компьютером 2. Газовый расходомер 6 сообщен на входе через трубопровод с газовым баллоном или компрессором (на фиг. не изображены) и на выходе через трубопровод с газовым трактом УЗ концентратора 27. Дозатор жидкости 7 снабжен шприцем 26, с помощью которого осуществляется подача раствора полимерного и лекарственного материала по шлангу, конец которого подходит с нижней стороны распылителя 5 и упирается в край торцевой части УЗ концентратора 27. Платформа 25 также оборудована кнопкой аварийного останова 23, при нажатии которой одновременно останавливаются все опасные перемещения, прекращается подача раствора, газа и генерирование УЗ колебаний.
Комплекс содержит камеру 1 для нанесения полимерных и лекарственных покрытий на импланты, промышленного робота-манипулятора 9 и магазин имплантов 13, расположенных на отдельных платформах 28 и 29. Платформы 28 и 29 выполнены из листового полимерного материала толщиной 10 мм в виде плоских прямоугольников, которые установлены в горизонтальной плоскости на одном уровне и не соприкасаются друг с другом. Камера распыления 1 оборудована стеклянными прозрачными герметичными стенками спереди и сзади, полустенкой слева с небольшим окном и дверцей 30 справа, которая открывается наружу и вверх для доступа оператора вовнутрь камеры. Модуль 15 безопасности, установленный в камеру 1 распыления, содержит световые индикаторы красного, оранжевого и зеленого цветов с подключенными к ним датчиками движения, открытия/закрытия дверцы (на фиг. не изображены), выходы которых соединены с соответствующими входами компьютера 2. В отверстие потолочной стенки камеры 1 по центру установлен УЗ концентратор 27, выполненный из нержавеющей стали. Многочисленные отверстия в потолочной стенке служат для вентиляции камеры от паров растворителя «самотеком». Распылитель 5 состоит из УЗ электроакустического преобразователя и УЗ концентратора 27, который выполнен в виде ступенчато переменного цилиндрического стержня с внутренним газовым трактом. При соприкосновении своего рабочего торца с жидкостью УЗ концентратор распыляет аэрозоль в поток газа-носителя, подаваемого сверху через газовый тракт, с образованием узконаправленного факела. На платформе 28 установлен промышленный робота-манипулятор 9, электронный модуль управления которого соединен с компьютером 2. Робот-манипулятор 9 в автоматическом режиме осуществляет захват имплантов из магазина имплантов 13 и переносит их во внутрь камеры 1, где в автоматическом режиме осуществляется процесс УЗ распыления растворов полимерных и лекарственных материалов и их нанесение в виде аэрозоля на поверхность импланта. Магазин имплантов 13 представляет собой вертикально стоящую полую шестиугольную призму с открытым верхом, снабженную электрическим приводом для движения вокруг вертикальной оси. По центру каждой грани призмы имеются посадочные желобки 24, в которые друг на друга уложены держатели имплантов 31. Каждый магазин имплантов 13 промаркирован баркодом. На конце держателя 31 закреплен имплант, свободный конец которого обращен во внутрь желобка 24. Процедура изъятия держателя 31 роботом-манипулятором 9 из желобка 24 начинается после считывания баркода оператором (при индикации светового сигнала зеленого цвета). После изъятия из магазина 13 имплант переносится в камеру распыления 1. Позиционирование импланта в камере 1 при нанесении аэрозольного покрытия осуществляется роботом-манипулятором 9 с высокой координатной точностью. Средняя величина позиционных отклонений импланта составляет не более 0,05 мм. Предлагаемый модуль УЗ распыления содержит камеру высокого разрешения, входы/выходы которой соединены с соответствующими выходами/входами персонального компьютера. Взаимодействие всех модулей предлагаемого роботизированного комплекса для нанесения полимерных и лекарственных покрытий на импланты представлено схематично на фиг. 1.
Модуль 8 позиционирования импланта, представлен 6-ти осевым роботом-манипулятором, имеет высокую гибкость применения при небольшой затрате энергии и высокой воспроизводимой точности.
Комплекс для нанесения полимерных и лекарственных покрытий на импланты методом УЗ распыления работает следующим образом.
Предпочтительный вариант модуля 8 позиционирования импланта выполнен на базе промышленного робота-манипулятора фирмы Mecademic (модель Меса500, производитель Канада), который состоит из 6-ти шарнирно связанных звеньев 32-37 (фиг. 2). Робот-манипулятор 9 поворачивается вокруг вертикальной оси благодаря поворотному звену 32 на 175° в каждую сторону. Звено 32 находится на неподвижном основании, которое снабжено необходимыми разъемами для подключения питания и блока управления (на фиг. не изображены). Звенья 33, 34, 35, 37 обеспечивают линейное перемещение, звено 36 обеспечивает поворотное движение на 115° в каждую сторону вокруг своей продольной оси. На стороне конца робота-манипулятора расположен шаговый двигатель 10, ротор которого выполнен в виде тонкого цилиндрического пина 38 длиной 25 мм. Последний обеспечивает захват стального держателя импланта 31, в передней части которого на цилиндрический тонкий стержень на глубину 2 мм насажен имплант (сосудистый металлический стент). Захват держателя с имплантом 31 осуществляется с задней стороны благодаря посадочному отверстию для пина глубиной 15 мм. При захвате роботом-манипулятором держатель вместе с имплантом находится в специальном накопителе-приемнике (магазине имплантов). Магазин имплантов 13 выполнен из полимерного материала в виде вертикально стоящей шестигранной призмы высотой около 200 мм с открытым верхом, снабженный поворотным механизмом с электроприводом. Призма условно разделена во фронтальной плоскости на 2 секции, одна (заполненная) из которых служит местом выдачи держателей с готовыми для нанесения аэрозолей имплантами, другая (пустая) - местом для приема держателей с покрытыми аэрозолем имплантами. В каждой грани призмы по ее центральной линии вертикально проделаны специальные прорези - посадочные желобки. Посадочный желобок 24 содержит посадочные места для нескольких держателей с имплантами. В общей сложности магазин имплантов рассчитан на 33 посадочных места для держателей импланта 31 (загрузка по принципу «друг на друга») и такое же количество приемных мест для держателей импланта с аэрозольным покрытием. Поворотный механизм магазина имплантов обеспечивает попеременную подачу к роботу-манипулятору одной стороны призмы одной из секций для извлечения/приема держателя импланта.
На фиг. 2. представлено исходное положение робота-манипулятора перед началом работы, когда звенья 36, 37 располагаются горизонтально, и световой индикатор светится оранжевым светом.
На основе примера, приведенного ниже, поясняется принцип действия робота-манипулятора со ссылками на фиг. 4-8. Схема последовательности технологического процесса отражена на фиг. 9.
Свободный доступ к внутреннему пространству камеры распыления обеспечивается за счет бокового расположения модуля позиционирования импланта и полустенки. Кратковременным нажатием кнопки ВКЛ/ВЫКЛ, расположенной на тачскрин дисплее 22, осуществляется запуск модуля аэрозольного распыления 3 (выключение осуществляется продолжительным нажатием кнопки), при этом на тачскрине отображается окно основного меню показанное на фиг. 3, робот-манипулятор занимает исходное положение (световой индикатор светится оранжевым светом). После считывания баркода оператором в окне основного меню «Automatic Spraying» в строках отображаются данные по типу и длине импланта. Оператор подтверждает правильность данных нажатием кнопки «Start» на основном меню, при этом загорается световой индикатор зеленого цвета. Далее робот-манипулятор начинает свою работу с процедуры извлечения держателя 31 с «чистым» имплантом из магазина 13 и на завершающем этапе заканчивает процедурой загрузки в магазин имплантов держателя с «готовым» имплантом. Основной алгоритм работы модуля аэрозольного распыления показан на фиг. 9.
На фиг. 3 показано окно основного меню, отображаемое на тачскрине при запуске модуля аэрозольного напыления.
На фиг. 4 (имплант на фиг. не изображен) схематично показан робот-манипулятор в момент захвата держателя импланта 31 в магазине 13. Незадолго до этого, из исходного положения робот-манипулятор при согласованной работе электродвигателей (на фиг. не изображены), которые расположены внутри корпусов звеньев 33, 35, 37, движется вниз на 8 см, при этом положение звена 37 остается горизонтальным. Одновременно выполняется поворот звена 33 на угол 12° вокруг вертикальной оси против часовой стрелки до положения, в котором продольная ось пина 38 становится параллельной продольной оси держателя импланта 31, установленного в магазин имплантов 13. Далее робот-манипулятор при помощи звеньев 35-37 движется по дуге по направлению вниз еще на 4-10 см вдоль стенки магазина имплантов 13 (зависит от высоты посадочного места держателя импланта в магазине имплантов), приближаясь к задней части самого верхнего в магазинном ряду держателя импланта 31, при этом горизонтальное положение звена 37 сохраняется. Таким образом робот-манипулятор перед захватом держателя импланта 31 выравнивает продольную ось пина 38 по отношению к продольной оси держателя по горизонтали. Заключительным перемещением по направлению к держателю на 3 см робот-манипулятор надевает держатель 31 на пин 38. Держатель импланта 31 готов к изъятию из магазина имплантов 13 и перемещению в камеру распыления 1.
Извлечение держателя импланта 31 из магазина имплантов 13 осуществляется согласованным движением звеньев 34-37 робота-манипулятора 9 по вертикали до точки, расположенной над магазином 13. В этой точке держатель импланта 31 полностью извлечен из посадочного желобка 24 магазина имплантов 13. Горизонтальное положение звена 37 при этом сохраняется.
После извлечения держателя импланта 31 из магазина имплантов 13 робот-манипулятор поворотным движением звена 32 на 70° против часовой стрелки вокруг вертикальной оси занимает положение, в котором продольная ось держателя импланта 31 совпадает с условным центром зоны распыления. Момент промежуточного поворотного движения модуля 8 позиционирования импланта изображен на фиг. 5 пунктирными линиями.
На фиг. 5 также показано конечное положение модуля 8 позиционирования импланта, в котором держатель импланта 31 находится во внутреннем пространстве камеры у переднего края зоны распыления перед подачей аэрозоля. Незадолго до этого, после окончания поворотного движения робот-манипулятор при помощи звеньев 33, 34, 36 и 37 перемещает держатель импланта 31 на 14-18 см вперед (зависит от длины зафиксированного импланта на конце держателя) и на 3 см по направлению вниз во внутреннее пространство камеры распыления и останавливается перед передним краем зоны распыления на расстоянии приблизительно 1 мм.
На фиг. 6 стрелками показано направление движения робота-манипулятора в процессе нанесения аэрозоля на имплант (на фиг. не изображен). Незадолго до этого, после программного запуска УЗ распылителя 5 на определенную величину мощности, включения потока инертного газа и раствора полимера (в том числе и с лекарственными веществами) по отдельной линии подачи газа и линии подачи раствора, робот-манипулятор 9 вносит имплант в зону распыления небольшого и узконаправленного факела аэрозоля. Имплант двигается с определенной скоростью в продольном направлении при помощи звеньев 33-35 и 37 от одного конца до другого и при этом медленно покрывается частицами аэрозоля. Одновременно с линейными перемещениями имплант совершает вращательные движения вокруг своей оси при помощи шагового двигателя 10. Таким образом достигают заданной толщины аэрозольного покрытия и одновременно обеспечивают равномерность его нанесения на имплант. В зависимости от длины импланта и требуемой толщины аэрозольного покрытия процесс распыления аэрозоля может занимать несколько циклов (проходов). За один совершенный цикл принимают один проход импланта вперед и назад под струей аэрозольных частиц, при котором имплант совершает определенное число круговых движений в одном или обоих направлениях.
После завершения манипуляций с имплантом по нанесению аэрозоля в камере распыления и прекращения подачи жидкости робот-манипулятор вновь занимает положение, изображенное на фиг. 5 («нулевое» положение).
На фиг. 7 показано перемещение робота-манипулятора после завершения процесса нанесения полимерного и лекарственного покрытия на имплант. Робот-манипулятор 9 из «нулевого» положения двигаясь назад на 14-18 см при помощи звеньев 33, 34, 35 и 36 переводится из внутреннего пространства камеры распыления наружу и поворотным движением звена 32 на 70° по часовой стрелке вокруг вертикальной оси перемещает держатель импланта с аэрозольным покрытием 31 к магазину имплантов 13, положение робота-манипулятора 9 при повороте отмечено пунктирными линиями. Магазин имплантов 13 при помощи поворотного механизма совершает движение на 180° против часовой стрелки вокруг вертикальной оси навстречу роботу-манипулятору 9 и подставляет к нему одну из своих сторон с незаполненным держателями рядом посадочных мест. Далее, робот-манипулятор 9 при помощи звеньев 35-37 перемещает держатель импланта с аэрозольным покрытием 31 к свободному желобку 24 магазина имплантов 13 таким образом, чтобы вертикальная центральная линия желобка 24 совпала с продольной осью держателя импланта 31. Это необходимо для того, чтобы закрепить держатель импланта 31 в магазине имплантов 13 и освободить пин 38, на фиг. 7 положение робота-манипулятора 9, изображено сплошными линиями.
На фиг. 8 показан робот-манипулятор 9 в момент процедуры укладки готового держателя импланта 13 в желобок 24 магазина имплантов 13. После совмещения продольной оси держателя импланта 31 по вертикали с центральной линией желобка магазина имплантов 24 робот-манипулятор опускает держатель импланта 31 на 2-18 см (зависит от степени заполнения желобка магазина имплантов) по желобку 24 вниз до упора при помощи звеньев 34-37 и неизменном горизонтальном положении звена 37. Далее, как только держатель импланта 31 достиг нижней точки, робот-манипулятор при помощи звеньев 33-37 отклоняется назад от магазина имплантов 13 на 4 см, при этом пин 38 выходит из держателя импланта 31. Цилиндрический держатель прочно фиксируется в продольном направлении в желобке 24 магазина имплантов 13 благодаря переднему и заднему кольцевому утолщению 39. Кольцевые утолщения 39 обеспечивают легкое освобождение пина 38 из держателя, а также надевание на держатель при разгрузке магазина импланов. Укладка (штабелирование) держателей импланта 31 в магазин имплантов 13 происходит по принципу «друг на друга». Процедура разгрузки/загрузки магазина имплантов 13 происходит таким образом, что робот-манипулятор 9 сначала захватывает держатели с имплантами из одной секции магазина имплантов 13, а потом возвращает их в свободную секцию, которая находится строго на противоположной грани шестиугольной призмы, т.е. каждый раз после извлечения держателя импланта 31 из одной секции магазин имплантов 13 должен повернуться вокруг вертикальной оси на 180° для осуществления процедуры загрузки того же держателя импланта 31 с аэрозольным покрытием.
После процедуры загрузки держателя импланта 31 с аэрозольным покрытием в магазин имплантов 13 при помощи звеньев 32-37 работ-манипулятор снова занимает исходное положение (см. фиг. 2). Магазин имплантов 13 при помощи встроенного поворотного электропривода движением вокруг вертикальной оси на 180° поворачивается к роботу-манипулятору 9 одной из своих граней, на которой в посадочном желобке 24 располагаются держатели 31 с «чистыми» имплантами. Индикаторная лампа 17 меняет свой цвет с зеленого на оранжевый, робот-манипулятор вновь ожидает команды «Start», и, после сканирования оператором баркода, процедуры по захвату и транспортировки имплантов в камеру распыления 1 и т.д. вновь повторяются согласно вышеизложенному.
В этом случае использование промышленного многоосевого робота-манипулятора 9 в предлагаемом изобретении позволит существенно повысить качество готовых изделий, значительно сократив время их обработки, резко снизить их себестоимость.
Предлагаемый роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты позволит покрывать твердые, мягкие импланты, биологические ткани, полимерные и металлические стенты различных размеров. Скорость распыляемой на имплант жидкости (растворов полимеров и лекарственных веществ с малой вязкостью) измеряется от 0,3 мл/мин и может контролироваться с высокой точностью. За одну рабочую смену комплекс может покрыть до 50 металлических стентов длиной 18 мм в зависимости от необходимой толщины покрытия. Комплекс позволит также с высокой точностью дозировать любой сжатый инертный газ (или воздух) в линию подачи газа-носителя. В состав устройства входит УЗ генератор и УЗ распылитель, который работает при частоте 130 кГц.
Предлагаемый роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты позволяет покрывать твердые, мягкие импланты, биологические ткани, полимерные и металлические стенты различных размеров. Скорость распыляемой на имплант жидкости (растворов полимеров и лекарственных веществ с малой вязкостью) измеряется от 0,3 мл/мин и может контролироваться с высокой точностью. За 1 рабочую смену комплекс может покрыть до 50 металлических стентов длиной 18 мм в зависимости от необходимой толщины покрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛИВА И НАЛИВА РЕЗЕРВУАРОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2834081C1 |
| Робот-автомойщик | 2017 |
|
RU2736792C1 |
| Роботизированная медицинская система и манипулятор для 3D-биопечати для полнослойного закрытия кожного дефекта | 2023 |
|
RU2814949C1 |
| ПРОМЫШЛЕННЫЙ ОДНОПОРТАЛЬНЫЙ ОДНОПРОХОДНЫЙ ПЕСЧАНО-ПОЛИМЕРНЫЙ 3D-ПРИНТЕР | 2024 |
|
RU2838644C1 |
| СИСТЕМА И СПОСОБ ИЗГОТОВЛЕНИЯ ФАРМАЦЕВТИЧЕСКИХ ОБЪЕКТОВ ПОСРЕДСТВОМ 3D-ПЕЧАТИ | 2018 |
|
RU2792691C2 |
| СИСТЕМА АДДИТИВНОГО ПРОИЗВОДСТВА | 2018 |
|
RU2780270C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ РЕМОНТНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС РАКЕТНО-АРТИЛЛЕРИЙСКОГО ВООРУЖЕНИЯ (МРРДК-РАВ) | 2022 |
|
RU2780079C1 |
| СИСТЕМА И СПОСОБ ДОЗАПРАВКИ СПУТНИКОВ | 2008 |
|
RU2478534C2 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |







Изобретение относится к медицине, более точно к медицинской технике, и может быть использовано для мелкодисперсного распыления жидкостей в наноиндустрии. Раскрыт роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты, содержащий камеру для нанесения полимерных и лекарственных покрытий на импланты, управляющий персональный компьютер, модуль аэрозольного распыления полимера с лекарственным средством, состоящий из платы управления, к которой подключены ультразвуковой генератор, газовый расходомер и дозатор жидкости, модуль позиционирования импланта, состоящий из робота манипулятора и шагового двигателя, с подключенной к нему платой управления, модуль управления магазином имплантов, состоящий из магазина имплантов с подключенной к нему платой управления, модуль безопасности, состоящий из датчиков движения и открытия камеры, с выходом которых соединен индикатор, и модуля контроля, состоящего из блока удаленного контроля, баркод сканера, камеры высокого разрешения, тачскрин дисплея и кнопки экстренного останова, при этом входы/выходы блока удаленного контроля, тачскрин дисплея, плат управления модуля позиционирования импланта, модуля аэрозольного распыления и модуля управления магазином соединены с соответствующими выходами/входами управляющего персонального компьютера, а выходы датчиков движения, баркод сканера и камеры высокого разрешения подключены к соответствующим входам управляющего персонального компьютера, кнопка экстренного останова соединена с управляющими входами робота манипулятора, индикатора и плат управления модулем позиционирования импланта и модулем аэрозольного распыления. Изобретение обеспечивает сокращение времени обработки, повышение качества готовых изделий и снижение себестоимости продукции. 4 з.п. ф-лы, 9 ил.
1. Роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты, содержащий камеру для нанесения полимерных и лекарственных покрытий на импланты, управляющий персональный компьютер, модуль аэрозольного распыления полимера с лекарственным средством, состоящий из платы управления, к которой подключены ультразвуковой генератор, газовый расходомер и дозатор жидкости, модуль позиционирования импланта, состоящий из робота манипулятора и шагового двигателя, с подключенной к нему платой управления, модуль управления магазином имплантов, состоящий из магазина имплантов с подключенной к нему платой управления, модуль безопасности, состоящий из датчиков движения и открытия камеры, с выходом которых соединен индикатор, и модуля контроля, состоящего из блока удаленного контроля, баркод сканера, камеры высокого разрешения, тачскрин дисплея и кнопки экстренного останова, при этом входы/выходы блока удаленного контроля, тачскрин дисплея, плат управления модуля позиционирования импланта, модуля аэрозольного распыления и модуля управления магазином соединены с соответствующими выходами/входами управляющего персонального компьютера, а выходы датчиков движения, баркод сканера и камеры высокого разрешения подключены к соответствующим входам управляющего персонального компьютера, кнопка экстренного останова соединена с управляющими входами робота манипулятора, индикатора и плат управления модулем позиционирования импланта и модулем аэрозольного распыления.
2. Комплекс п. 1, отличающийся тем, что в качестве робота манипулятора в ней установлен шестиосевой высокоточный промышленный робот-манипулятор.
3. Комплекс по п. 1, отличающийся тем, что камера для нанесения полимерных и лекарственных покрытий на импланты представляет собой бокс с прозрачными стенками, выполненный с возможностью доступа в него оператора, и модуль позиционирования импланта и дозатора жидкости.
4. Комплекс по п. 1, отличающийся тем, что магазин имплантов выполнен в виде полой шестигранной призмы с открытым верхом, снабженной электрическим приводом для движения вокруг вертикальной оси, по центру каждой грани призмы выполнены посадочные желобки для размещения в них держателей имплантов.
5. Комплекс по п. 1, отличающийся тем, что модуль аэрозольного распыления полимера с лекарственным средством, модуль позиционирования импланта, модуль управления магазином имплантов, модуль безопасности и модуль контроля связаны единой управляющей программой, установленной на персональном компьютере и управляемой через тачскрин.
| US 20080093473 A1, 24.04.2008 | |||
| РАСПЫЛИТЕЛЬ МАТЕРИАЛА ПОКРЫТИЯ И СПОСОБ ПОПОЛНЕНИЯ ТАКОГО РАСПЫЛИТЕЛЯ МАТЕРИАЛОМ ПОКРЫТИЯ | 2009 |
|
RU2500485C2 |
| US 20070031611 A1, 08.02.2007 | |||
| WO 2007018980 A2, 15.02.2007. | |||

