Изобретение относится к области робототехники, а именно к средствам определения результирующей величины положения объекта в пространстве, а конкретно для определения расстояния до окружающих препятствий, относительно технического средства.
Известно изобретение по патенту Китая CN105487543 «Подвижная система самонаведения и зарядки робота» G05D1/02, 2016. Изобретение обеспечивает подвижную систему самонаведения и зарядки робота, которая включает в себя компоненты инфракрасного передатчика, который сконфигурирован в зарядном основании. Система содержит пять инфракрасных приемников, которые используются для обнаружения сигнала, передаваемого инфракрасным передатчиком. Ультразвуковой датчик используется для обнаружения расстояния между роботом и зарядным основанием. Первый модуль беспроводной связи сконфигурирован в роботе и используется для передачи сигнала запроса зарядки на базу зарядки. Для приема сигнала запроса зарядки через второй модуль беспроводной связи предназначен модуль управления, который сконфигурирован в базе зарядки. С помощью механизма перемещения осуществляется перемещение или поворот робота. Основной контроллер используется для перемещения движущегося механизма, приведения робота в действие, которое определяется ультразвуковым датчиком и условиями приема сигнала инфракрасного передатчика из пяти инфракрасных приемников. Недостатком данного технического решения является узкая направленность использования датчиков, а так же сложность расположения датчиков.
Наиболее близким аналогом заявляемого изобретения является техническое решение по патенту Китая CN105739499 «Многолучевая инфракрасная и ультразвуковая система распределения датчиков автономной системы предотвращения препятствий для мобильных роботов» G05D1/02, 2016. Согласно техническому решению, многоканальная структура включает ультразвуковые датчики и инфракрасные датчики, установленные в положении высоты шасси робота, шасси является круглым. Внешнее кольцо шасси делится на область 0°-180° и область 180°-360° по линии L, проходящей через центр, а положение 90° является прямым направлением робота. Три ультразвуковых датчика и два инфракрасных датчика расположены в области 0°-180°. Датчики расположены на 0°, 90° и 180° соответственно. Измерение расстояния более 30 см выполняется ультразвуковым датчиком, а инфракрасный датчик применяется в пределах 30 см. В качестве ультразвукового и инфракрасного датчиков используются готовые решения. Используют ультразвуковой датчик HC-SR04, эффективный диапазон которого составляет от 2 см до 450 см, а измеряемый угол составляет менее 15 градусов и инфракрасный датчик Realplay2Y0A21GP2Y0A21YK0F, его максимально допустимый угол составляет 40°. Недостатком данного технического решения является сложность измерения расстояния до плохо детектируемых объектов, расположенных под углом относительно датчика или имеющих неоднородную поверхность.
Техническим результатом заявляемого изобретения является повышение качества измерения расстояния до сложно определяемых объектов.
Технический результат достигается за счет того, что в системе определения препятствий движению робота, содержащей ультразвуковые и инфракрасные датчики установленные вдоль наружной поверхности робота, согласно изобретению ультразвуковые и инфракрасные датчики входят в состав массива гибридных датчиков, установленных по периметру наружной поверхности робота, каждый гибридный датчик содержит инфракрасный датчик, мембрану излучателя ультразвукового сигнала, мембрану приемника ультразвукового сигнала, светодиодный индикатор, связанные с микроконтроллером, который в свою очередь связан сетью c блоком управления робота.
Технический результат обеспечивается за счет того, что гибридные датчики расположены вдоль наружной поверхности по периметру робота. Это позволяет определять сложно детектируемые объекты за счет того, что отраженный от сложно детектируемого объекта сигнал может приниматься соседними гибридными датчиками, это позволяет расширить угол улавливания отраженного сигнала.
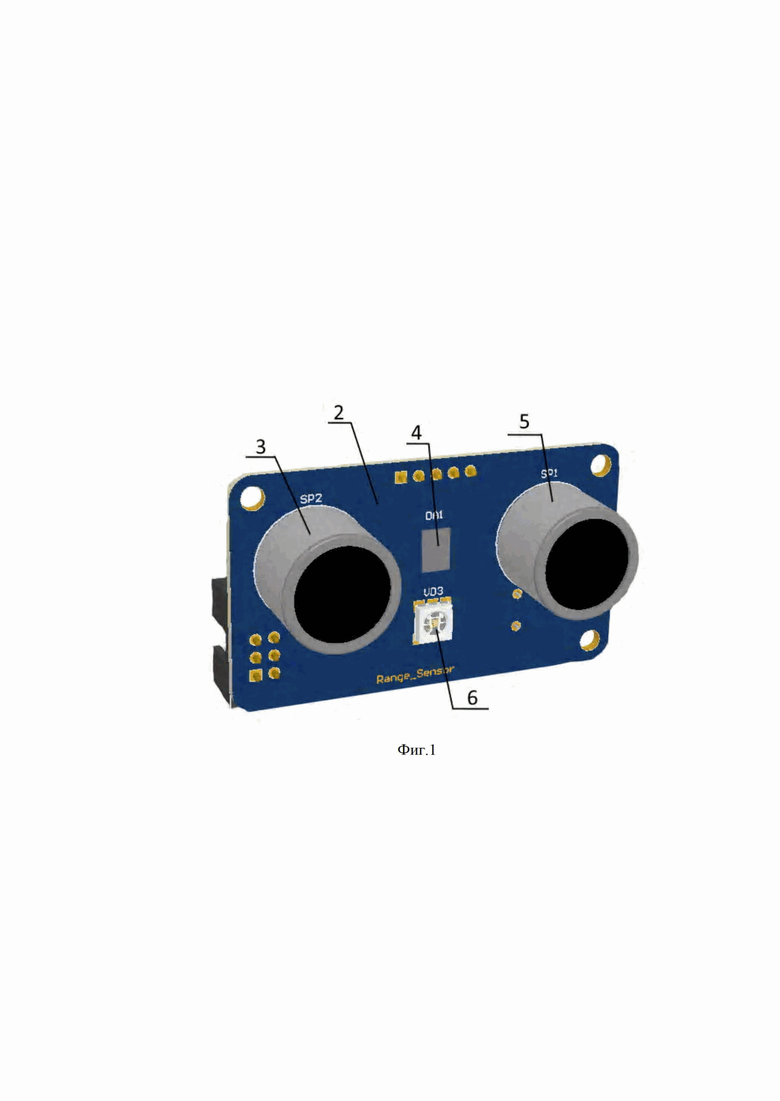
На фигуре 1 представлен вид спереди платы гибридного датчика.
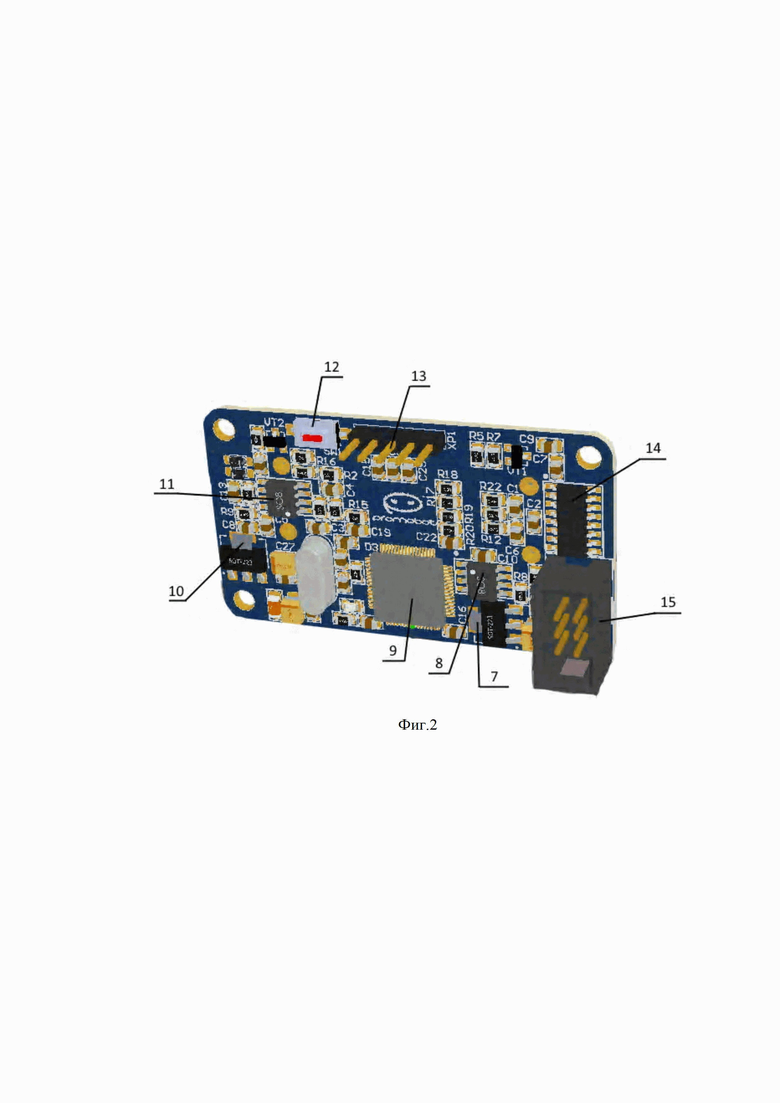
На фигуре 2 представлен вид сзади платы гибридного датчика.
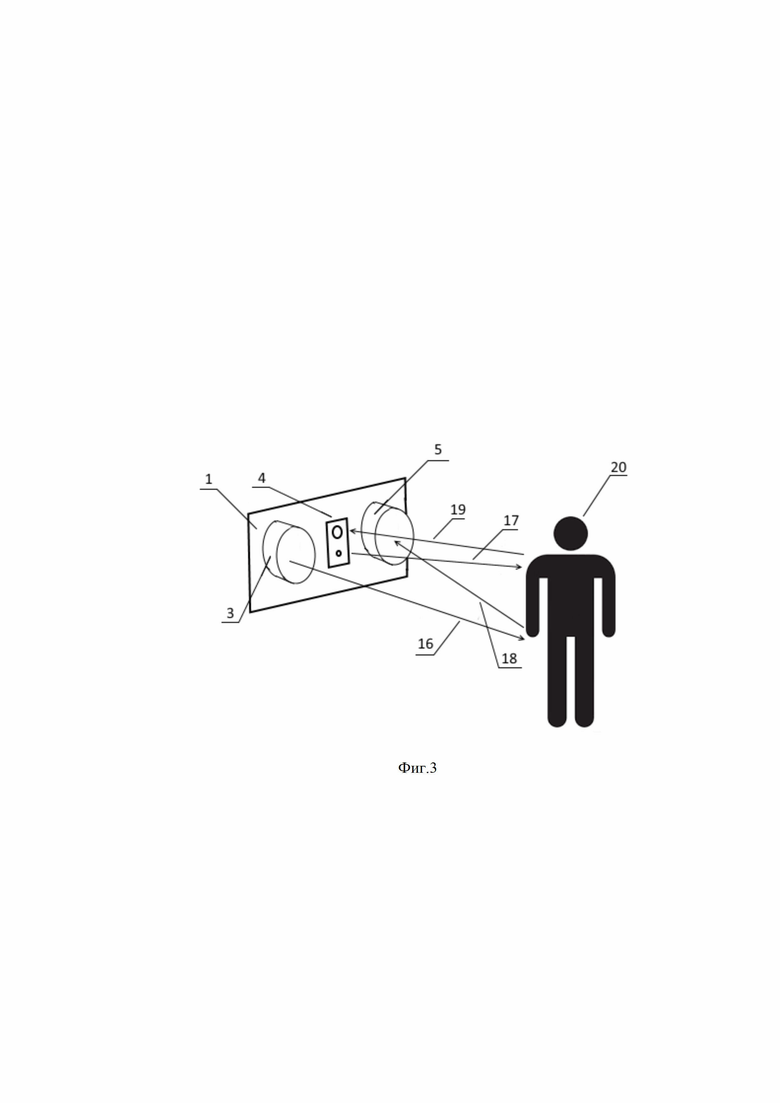
На фигуре 3 изображена схема работы гибридного датчика в «стандартном» режиме.
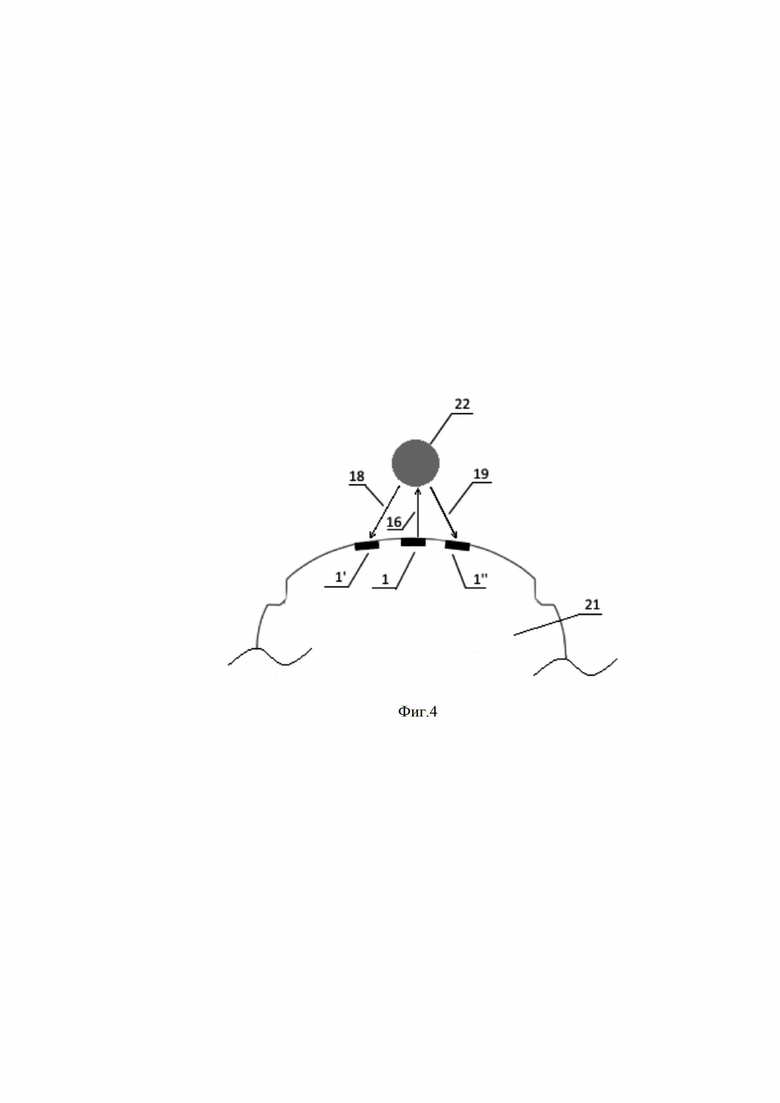
На фигуре 4 изображена схема работы гибридного датчика в режиме «1+2».
На фигуре 5 представлено расположение гибридных датчиков в составе сервисного робота.
Система определения препятствий состоит из массива гибридных датчиков 1, расположенных по периметру юбки робота. С двух сторон у гибридного датчика 1 расположены соседние гибридные датчики 1' и 1". Гибридный датчик 1 содержит печатную плату 2. На одной стороне печатной платы 2 расположен излучатель УЗ-сигнала 3 с мембраной, инфракрасный датчик 4 (ИК-датчик), приемника УЗ-сигнала 5 с мембраной; RGB-светодиод 6. На другой стороне печатной платы 2 расположены линейный регулятор напряжения 7, преобразователь 8 интерфейса RS-485 в UART, микроконтроллер 9, линейный регулятор напряжения 10, операционный усилитель 11, кнопка сброса параметров датчика 12, разъем программирования 13, преобразователь 14 для усиления УЗ-сигнала, разъем 15 для подачи питания и передачи данных.
В системе определения препятствий для последовательного подключения множества датчиков 1 используют интерфейс RS-485, используют протокол передачи данных Modbus RTU. В качестве ИК-датчика 4 используют датчик STM VL5310x, светодиод 6 является RGB-светодиодом, используют линейный регулятор 7 марки В LM-1117-5, для преобразователя 8 используют преобразователь RS-485, микроконтроллер 9 - микроконтроллер STM32F302. В качестве линейного регулятора 10 – может быть использован линейный регулятор напряжения 3.3В LM-1117-3.3, в качестве операционного усилителя 11 - операционный усилитель LM358, в качестве преобразователя 14 - преобразователь RS-232 MAX-202. Разъем 15 может быть выполнен в виде разъема IDC-6.
Устройство работает следующим образом. Система определения препятствий имеет два режима работы – стандартный режим и режим “1+2”. Стандартный режим используется для детектирования расстояния с помощью одного гибридного датчика 1. Режим “1+2” используется для определения расстояния с трех гибридных датчиков 1, расположенных по периметру юбки робота на расстоянии от 5 до 15 см друг от друга. Данный режим позволяет детектировать “сложные” препятствия, расположенные, например, под углом относительно датчика 1, или имеющие неоднородную поверхность и т.д., которые при стандартном режиме работы не детектируются.
Стандартный режим работы гибридного датчика 1 имеет несколько этапов. Гибридный датчик 1 получает сигнала от ПК в сети MODBUS на выполнение измерения. Микроконтроллер 9 инициирует отправку сигналов измерения двух видов: УЗ-сигнала 16 с помощью мембранного излучателя 3, и ИК-сигнала 17 с помощью излучателя ИК-датчика 4. Отраженные УЗ-сигналы 18, и отраженные ИК-сигналы 19 от объекта 20 попадают соответственно на мембрану-детектор приемника УЗ-сигнала 5 и приемную линзу ИК-датчика 4. При инициализации отправки сигналов измерения микроконтроллер запускает таймер, общий для двух типов измерений. При получении отраженного сигнала 18 или 19 каждый из двух измерительных трактов прерыванием останавливает таймер, и далее микроконтроллер 9 передает по сети MODBUS два регистра с вычисленными значениями расстояния для каждого из метода измерения.
Использование режима “1+2” возможно только при наличии в сети MODBUS как минимум трех гибридных датчиков 1, 1', 1". Данный режим предназначен для определения сложно детектируемых объектов. Пример работы данного режима представлен на фигуре 4 на примере функционирования трех гибридных датчиков 1 в сервисном роботе PROMOBOT V.4 – 21. Центральный гибридный датчик 1 получает сигнал от ПК в сети MODBUS на выполнение измерения. Микроконтроллер 9 инициирует отправку сигналов измерения 16. Также ПК отправляет двум соседним датчикам 1', 1" команду на ожидание отраженного сигнала без излучения. При наличии трудно детектируемого объекта 20 например, такого, как круглый столб 22, сигналы измерения 16 будут отражены под таким углом, что центральный датчик 1 не будет способен зафиксировать отраженные сигналы 18,19. Но соседние датчики 1' и 1" способны зафиксировать такие сигналы. Таким образом, в данном режиме работы при измерении получается три результата, из них используется ПК самое наименьшее значение, которое и будет являться расстоянием от центрального гибридного датчика 1 до объекта 22. Таким образом, сводится к минимуму количество испускаемых сигналов измерения за один цикл опроса массива гибридных датчиков. Это в свою очередь положительно влияет на зашумленность сигналами измерения области измерения, на качество детектирования объектов, от которых сигнал измерения отражается с прямой линии датчика, и на качество детектирования сложных объектов.
Система определения препятствий робота имеет дополнительную возможность. Такую, как световая индикация порога измеренного расстояния. Для более удобного определения “сработки” гибридного датчика расстояния 1 предусмотрен RGB-светодиод 6. Каждый метод измерения имеет свой цвет индикации. УЗ-датчик – синий цвет. ИК-датчик – зеленый. Данная функция имеет следующий алгоритм работы: предварительно в соответствующий регистр настроек гибридного датчика расстояния 1 записывается пороговое значение расстояния. После замера расстояния результат измерения каждого метода сравнивается с пороговым значением, если результат измерения ниже порогового значения, то соответствующий светодиод 6 индицирует о значении ниже порогового. При результате измерения выше порогового, светодиод 6 гаснет.
Примером использования датчика расстояния является автономный сервисный робот PROMOBOT V.4 21., в котором используются шестнадцать гибридных датчиков 1, расположенных по периметру в нижней части робота на высоте около 12 см и расстоянии друг от друга в пределах 5,5-12 см. В качестве Мастера в сети MODBUS выступает ПК.
Таким образом, заявляемое изобретение позволяет повысить качество и точность измерения расстояния до сложно детектируемых объектов, расположенных под углом относительно датчика или имеющих неоднородную поверхность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1992 |
|
RU2041481C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| СПОСОБ НАВИГАЦИИ ДЛЯ ПРИНТЕРА, ПРИНТЕР И МАЯК | 2020 |
|
RU2758714C2 |
| АППАРАТ ДЛЯ ДИАГНОСТИКИ И ПОЛИФАКТОРНОЙ ФИЗИОТЕРАПИИ | 2000 |
|
RU2167686C1 |
| ТРУБОПРОВОДНЫЙ ДИАГНОСТИЧЕСКИЙ РОБОТ | 2018 |
|
RU2707644C1 |
| ИНФРАКРАСНЫЙ ОПТИЧЕСКИЙ ГАЗОАНАЛИЗАТОР | 2015 |
|
RU2596035C1 |
| ДЕТЕКТОР ВАЛЮТ, ЦЕННЫХ БУМАГ И ДОКУМЕНТОВ | 2015 |
|
RU2577197C1 |

Изобретение относится к управлению положением в пространстве робота. Система определения препятствий движению робота содержит ультразвуковые и инфракрасные датчики, установленные вдоль наружной поверхности робота. Ультразвуковые и инфракрасные датчики входят в состав массива гибридных датчиков. Массив гибридных датчиков содержит не менее трех гибридных датчиков, установленных по периметру наружной поверхности робота. Каждый гибридный датчик содержит инфракрасный датчик, мембрану излучателя ультразвукового сигнала, мембрану приемника ультразвукового сигнала, светодиодный индикатор, связанные с микроконтроллером. Микроконтроллер, в свою очередь, связан сетью c блоком управления робота. Технический результат заключается в повышении качества и точности измерения расстояния до сложно определяемых объектов. 5 ил.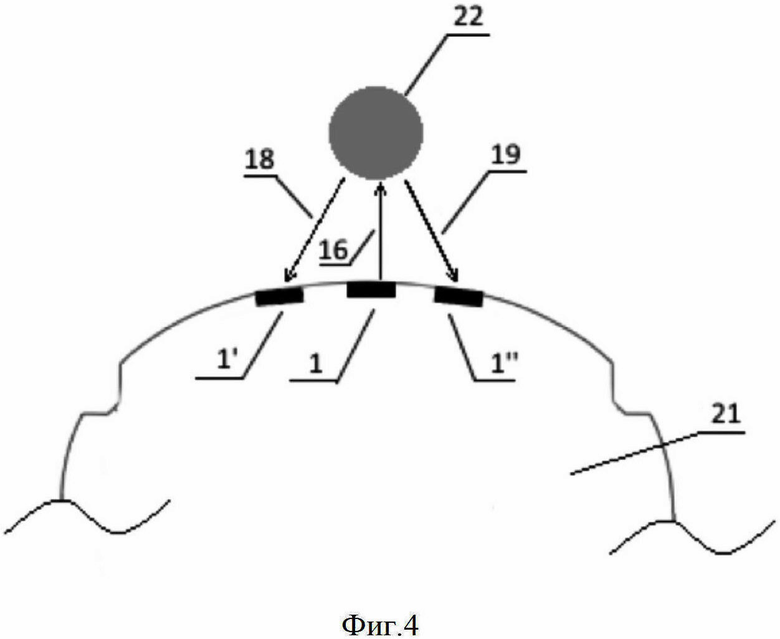
Система определения препятствий движению робота, содержащая ультразвуковые и инфракрасные датчики, установленные вдоль наружной поверхности робота, отличающаяся тем, что ультразвуковые и инфракрасные датчики входят в состав массива гибридных датчиков, содержащего не менее трех гибридных датчиков, установленных по периметру наружной поверхности робота, каждый гибридный датчик содержит инфракрасный датчик, мембрану излучателя ультразвукового сигнала, мембрану приемника ультразвукового сигнала, светодиодный индикатор, связанные с микроконтроллером, который, в свою очередь, связан сетью c блоком управления робота.
| CN 105739499 A, 06.07.2016 | |||
| WO 2018038553 A1, 01.03.2018 | |||
| РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ТАКОВЫМ | 2013 |
|
RU2540058C2 |
| РЕЖИМ ОЖИДАНИЯ ЧЕЛОВЕКОПОДОБНОГО РОБОТА | 2015 |
|
RU2663657C2 |
| Способ и устройство мобильного робота для прохождения замкнутых контуров и лабиринтов | 2017 |
|
RU2670826C9 |

