Следующее изобретение относится к системе для фиксации изображения подошвы с помощью сканирования ступни, которая основывается на датчике глубины или устройстве захвата трехмерного изображения, подключенного к переносной конструкции, включающая регулируемые по высоте ножки, первую раму, которая удерживает стеклянную панель, и эластичную мембрану, на которую пациент ставит свою ногу, контактируя с расположенной ниже стеклянной панелью, для фиксации изображения подошвы. В практическом варианте осуществления настоящего изобретения пара платформ с парой регулируемых по высоте ножек со стороны, противоположной откидной стороне, может подвижно соединяться с двумя противоположными сторонами первой рамы, которая удерживает стеклянную панель. Следовательно, ключевой предмет настоящего изобретения - система, оснащенная переносной конструкцией с эластичной мембраной, на которую можно наступать ногой, и дном или упором в форме прозрачной стеклянной панели, на которую в конечном итоге упирается нога; система позволяет осуществлять транспортировку всего узла, чтобы обеспечить возможность фиксации изображения стопы в любом необходимом месте.
Таким образом, посредством обеспечения возможности транспортировки всего узла простым способом во многих ситуациях систему можно переместить в то место, где она будет использоваться, без необходимости передвижения пользователей или пациентов в место расположения системы. Благодаря этому, например, в случае изготовления индивидуальных стелек для группы людей, такой как спортивная команда, узел, который требуется для фиксации изображения подошвы, можно переместить без передвижения всех членов команды в место, где система установлена неподвижно.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Как известно, сканеры подошвы на рынке обычно получают изображение стопы посредством ее помещения на стеклянную панель, вследствие чего изображение пятки и переднего отдела стопы получается плоским, а подошвенная дуга выглядит значительно меньшей.
Кроме того, заявитель является также правообладателем в отношении патентного документа ES 2336533, в котором приводится устройство для фиксации изображения подошвы, которое строится на сканере, посредством которого можно получить виртуальное изображение с высокой точностью в месте фактического нахождения пациенты, осуществляя сканирования мягкой ткани и моделируя ситуацию, когда стопа находится в обуви.
Для этого конструкция подключается к сканеру подошвы, что позволяет подгонять ее на основании пары регулируемых по ширине и высоте опор, которые проходят через ее верх с помощью пары перекладин, между которыми располагается эластичная мембрана, на которую пользователь помещает стопу для сканирования.
Один заслуживающий внимания факт заключается в том, что перемещение сканеров подошвы является существенным недостатком, как из-за своего объема, так и из-за возможного нарушения их регулировки.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Система фиксации изображения стопы представлена в настоящем описания и включает:
- датчик глубины или устройство захвата трехмерного изображения, и
- переносную конструкцию, которая характеризуется наличием:
- регулируемых ножек, каждая из которых образуется трубчатым центральным корпусом, который покрывает, соответственно на каждом конце, первый корпус и второй корпус, которые оба регулируются по высоте внутри;
- первой рамы, которая удерживает стеклянную панель, соединенную с трубчатым центральным корпусом каждой регулируемой ножки, и;
- эластичной мембраны, соединенной со вторым корпусом первых ножек.
Первая рама, которая удерживает стеклянную панель, которая функционирует в качестве прозрачного дна или упора, соединяется с трубчатыми центральными корпусами, образующими первые ножки и регулирующимися по высоте с помощью настройки первых корпусов, образующих регулируемые ножки, которые удерживаются на дне с помощью опорных оснований.
В первом варианте осуществления эластичная мембрана располагается во второй раме, которая, в свою очередь, соединяется со вторыми корпусами, образующими первые ножки.
Во втором варианте осуществления эластичная мембрана крепится к паре параллельных перекладин, которые, в свою очередь, крепятся ко вторым корпусам, образующим первые ножки, чтобы натяжение мембраны можно было регулировать с помощью анкерных устройств, расположенных на паре перекладин.
В обоих вариантах осуществления эластичная мембрана регулируется по высоте относительно первой рамы благодаря возможности регулировки положения второго корпуса по трубчатому центральному корпусу.
В любом из вариантов осуществления настоящего изобретения пара платформ, предусмотренная с парой регулируемых по высоте ножек со стержневым креплением на стороне, противоположной откидной стороне, подвижно соединяются с соответствующей платформой с помощью поворотных осей на двух противоположных сторонах первой рамы.
Каждая вторая ножка покрывает на свободном конце третий корпус для регулировки высоты.
Оба первых корпуса, образующих первые ножки переносной конструкции, и третьи корпусы, образующие вторые ножки, которые подвижно соединяются с платформами, заканчиваются соответствующими вращающимися опорными основаниями на поворотных осях.
Следовательно, так как первые ножки и вторые ножки заканчиваются соответствующими вращающимися опорными основаниями, работа которых основывается на регулировке высоты узла ножек и стержневого крепления их опорных оснований, общая конструкция может наклоняться до 45° с целью облегчения сканирования стопы в разных положениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чтобы дополнить следующее описания и лучшего понимания признаков настоящего изобретения, к данному описанию прилагается комплект чертежей, на фигурах которых посредством изображения без ограничения представлены наиболее характерные подробности настоящего изобретения.
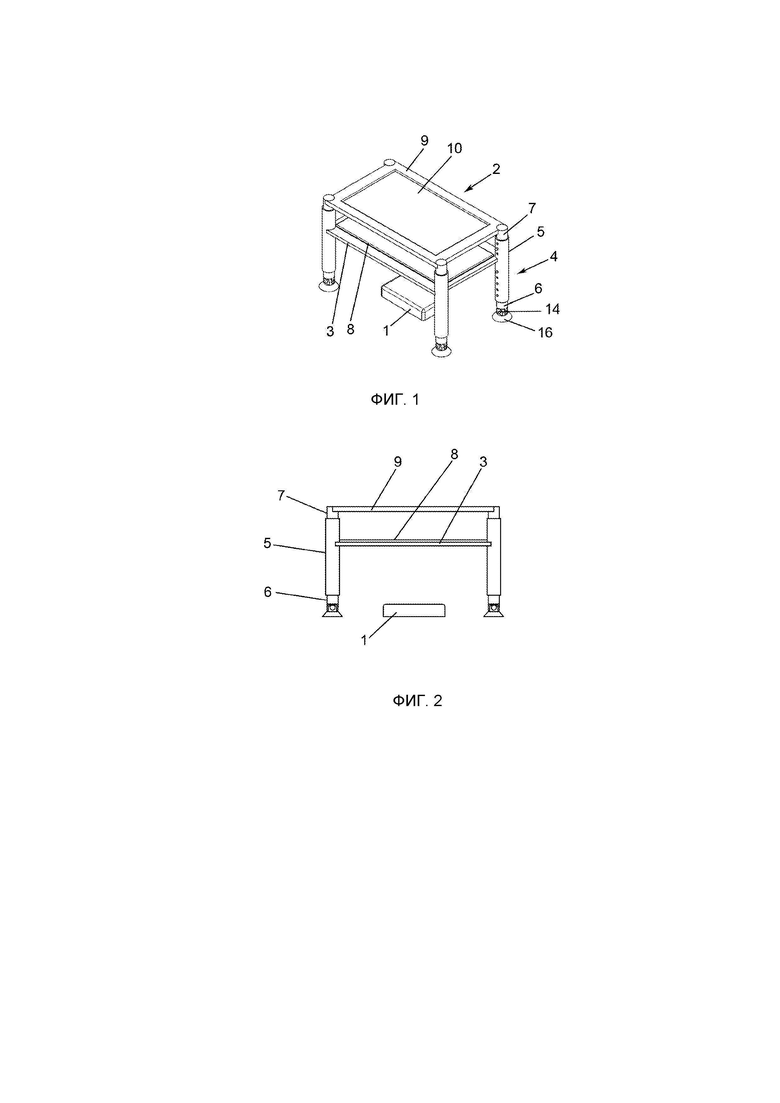
На фигуре 1 представлен вид в перспективе системы по настоящему изобретению в первом варианте осуществления с датчиком под ней в соответствии со стеклянной панелью первой рамы и эластичной мембраной второй рамы.
На фигуре 2 представлена первая вертикальная боковая проекция предыдущей фигуры, на которой показано, каким образом датчик центрируется под переносной конструкцией.
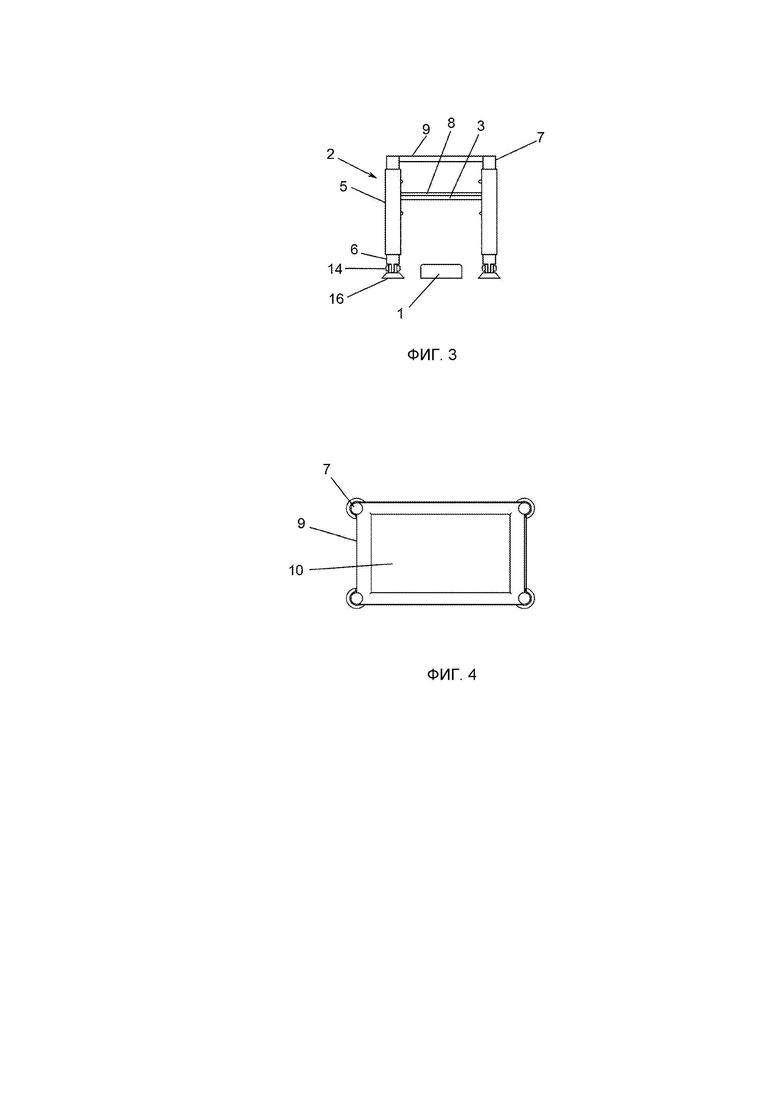
На фигуре 3 представлена вторая вертикальная боковая проекция фигуры 1, на которой показано, каким образом датчик центрируется под переносной конструкцией.
На фигуре 4 представлена горизонтальная проекция фигуры 1, на которой показана вторая рама с эластичной мембраной.
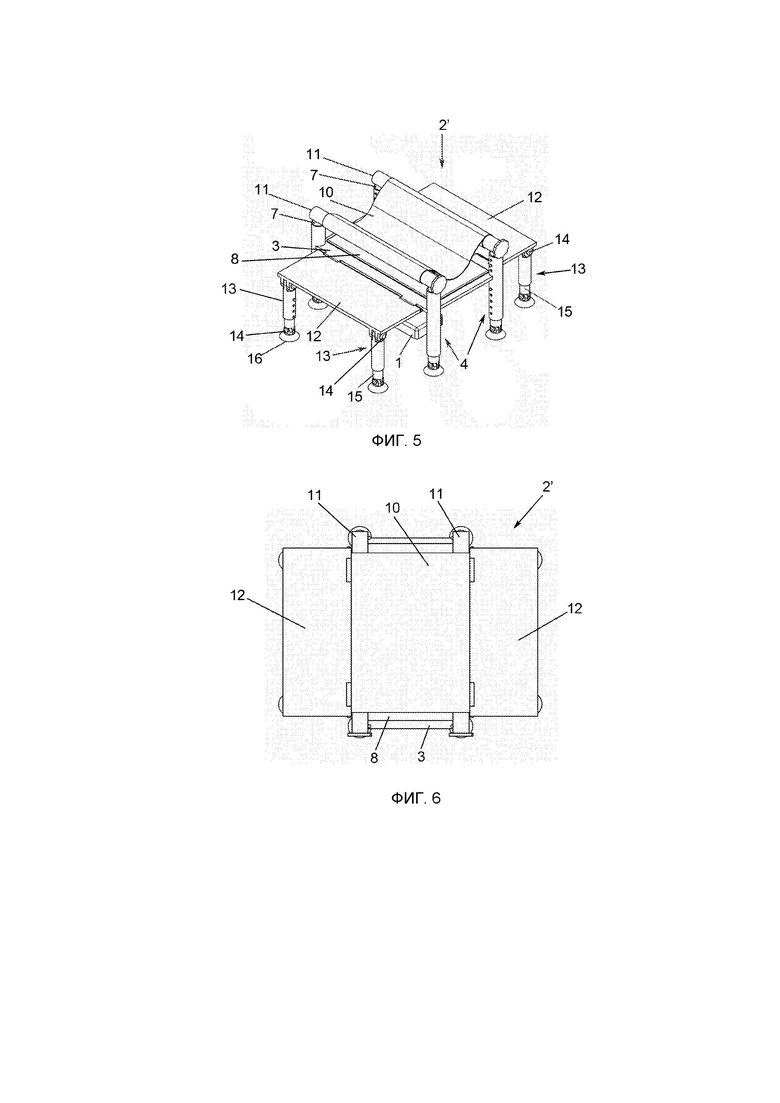
На фигуре 5 представлен вид в перспективе системы по настоящему изобретению во втором варианте осуществления, при этом пара перекладин, которые удерживают эластичную мембрану, крепятся ко вторым корпусам, образующим первые ножки переносной конструкции; также показаны платформы, которые подвижно соединены с первой рамой с двух сторон и включают соответствующие пары регулируемых по высоте ножек с подвижным креплением на стороне, противоположной откидной стороне.
На фигуре 6 представлена горизонтальная проекция предыдущей фигуры.
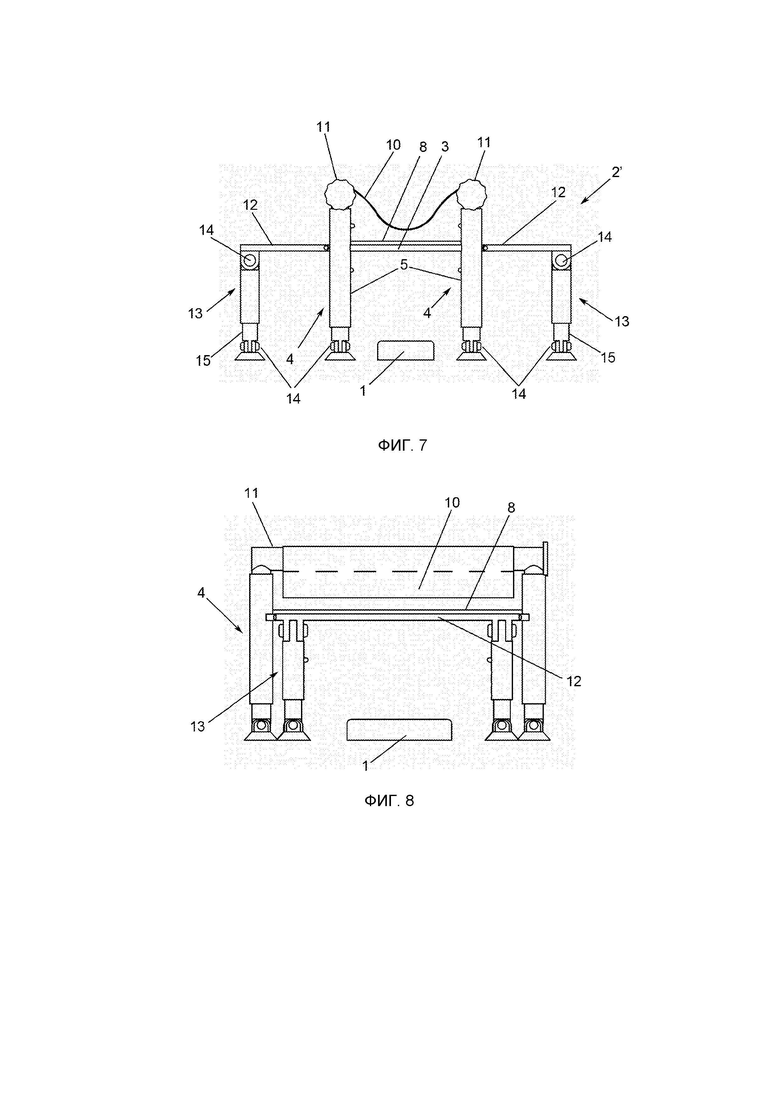
На фигуре 7 представлена вертикальная боковая проекция фигуры 5, на которой показано, как пара платформ, подвижно соединенная с первой рамой, которая удерживает стеклянную панель, соединяется с ней, позволяя пользователю становиться сверху.
На фигуре 8 представлен вертикальный вид фигуры 5.
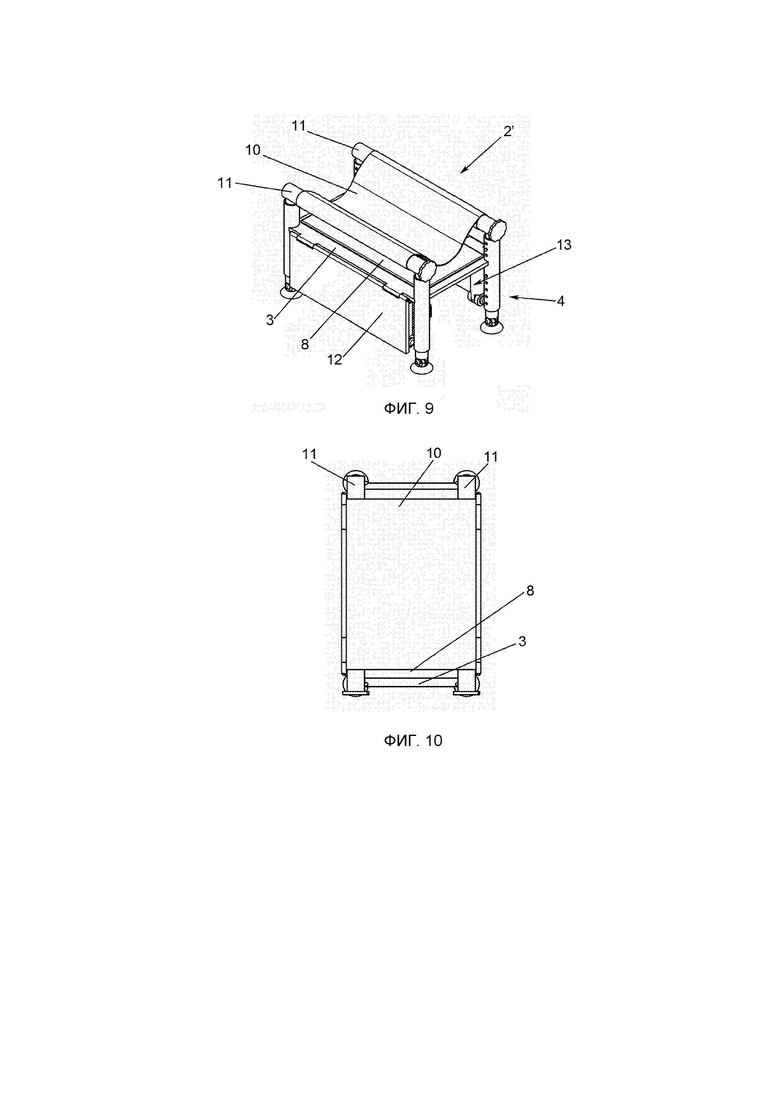
На фигуре 9 представлен вид в перспективе системы по настоящему изобретению, представленной на фигуре 5, в сложенном положении.
На фигуре 10 представлена горизонтальная проекция фигуры 9.
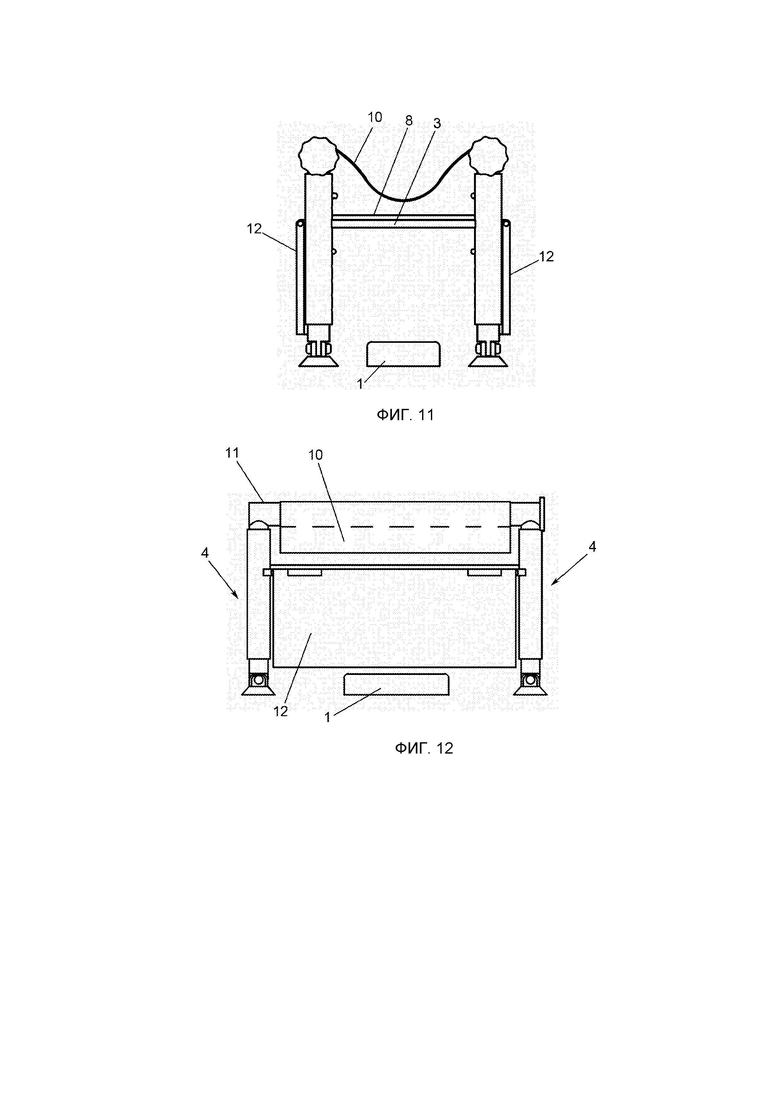
На фигуре 11 представлена вертикальная боковая проекция фигуры 9, на которой показано, как пара платформ, подвижно соединенных с первой рамой, крепится с помощью стержня, а также показана пара ножек, подвижно соединенных аналогичным образом, сложенная на указанных платформах.
На фигуре 12 представлен вертикальный вид фигуры 9.
Перечень позиций, используемых на фигурах, представлен ниже:
1. Датчик глубины.
2. Первая переносная конструкция.
2'. Вторая переносная конструкция.
3. Первая рама.
4. Первые ножки.
5. Трубчатый центральный корпус.
6. Первый корпус.
7. Второй корпус.
8. Стеклянная панель.
9. Вторая рама.
10. Эластичная мембрана.
11. Перекладина.
12. Платформа.
13. Вторые ножки.
14. Поворотная ось.
15. Третий корпус.
16. Опорное основание.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ввиду вышеприведенных фигур и в соответствии с принятой нумерацией можно увидеть, каким образом система для фиксации изображения стопы по настоящему изобретению главным образом включает в себя датчик глубины 1 и переносные конструкции 2, 2’; датчик глубины 1 может определяться как мобильное устройство, способное захватывать трехмерные изображения, такое как ноутбук с веб-камерой, мобильный телефон, планшет или любое другое электронное устройство оснащенное датчиком глубины 1.
Таким образом, в первом варианте осуществления на фигуре 1 представлена переносная конструкция 2, включающая в себя первые ножки 4, образованные трубчатым центральным корпусом 5, при этом первый корпус 5 и второй корпус 7 покрываются снизу и сверху на каждом конце с возможностью регулировки в положении относительно трубчатого центрального корпуса 5. Первая переносная конструкция 2 также включает в себя первую раму 3, которая удерживает стеклянную панель 8, соединенную с трубчатым центральным корпусом 5, который образует соответствующие первые ножки 4, и вторую раму 9, которая удерживает эластичную мембрану 10, расположенную над первой рамой 3.
С этой конфигурацией предусматривается эластичная мембрана 10 для захвата изображения подошвы при помещении ступни на нее и прозрачное дно или упор в форме стеклянной панели 8 первой рамы 3, на которую в конечном итоге упирается нога, чтобы выполнить сканирование с помощью датчика глубины 1 или эквивалентного мобильного устройства, расположенного под стеклянной панелью 8.
Более того, высота первых ножек 4 может регулироваться посредством изменения положения первого корпуса 6 и второго корпуса 7 относительно трубчатого центрального корпуса 5.
Следовательно, положение первой рамы 3, которая удерживает стеклянную панель 8, регулируется по высоте с посредством регулировки первого корпуса 6 относительно трубчатого центрального корпуса 5.
Более того, расстояние между второй рамой 9, которая удерживает эластичную мембрану 10, и первой рамой 3, которая удерживает стеклянную панель 8, регулируется посредством изменения положения второго корпуса 7 на трубчатом центральном корпусе 5, образующем первые ножки 4.
Следовательно, чтобы осуществить захват изображения подошвы пациента или пользователя, продольная опора, не представленная на фигурах, крепится к первой переносной конструкции 2, чтобы пациент или пользователь мог поместить свою ступню, захват изображения которой не выполняется, для обеспечения устойчивого и комфортного положения.
Во втором варианте осуществления, как представлено на фигуре 5, вторая переносная конструкция 2' включает в себя пару параллельных перекладин 11, прикрепленных ко вторым корпусам 7 первых ножек 4. Эластичная мембрана 10, фиксируемая с помощью креплений, натяжение которой регулируется посредством поворота перекладин 11, расположена между перекладинами 11.
В любом из вариантов осуществления, предусматривающим удерживание эластичной мембраны 10 посредством второй рамы 9 или перекладин 11, соответствующие платформы 12, которые (на сторонах, противоположных откидным сторонам) имеют соответствующие пары вторых ножек 13, подвижно соединенных с соответствующими платформами 12 с помощью поворотных осей 14, подвижно соединяются с двумя любыми противоположными боковыми сторонам первой рамы 3.
Упомянутые вторые ножки 13 регулируются по высоте посредством третьих корпусов 16, которые вставлены в них на нужную длину, аналогично первым корпусам 6 в трубчатом центральном корпусе 5 первых ножек 4.
Следовательно, на фигурах 5 и 7, можно увидеть, как пара платформ 12 соединяется с первой рамой 3 одновременно с креплением пары перекладин 11, между которыми располагается эластичная мембрана 10, ко вторым корпусам 7, чтобы высоту упомянутой эластичной мембраны 10 относительно стеклянной панели 8, встроенной в первую раму 3, можно было регулировать посредством настройки высоты вторых корпусов 7 или креплений для фиксации эластичной мембраны 10 на паре перекладин 11, межу которыми она располагается.
Таким образом, первая рама 3 с вмонтированной стеклянной панелью 8 встроена в трубчатые центральные корпусы 5, которые вместе с первыми корпусами 6 и вторыми корпусами 7 формируют первые ножки 4 первой переносной конструкции 2. Данная конфигурация определяет основную опору второй переносной конструкции 2', так как вторые ножки 13 могут свободно вращаться на внутренней поверхности платформ 12 и, в свою очередь, платформы 12 могут аналогичным образом вращаться относительно их соединительной оси, которая подвижно соединяется с первой рамой 3, изменяя конфигурацию второй переносной конструкции 2' путем простого добавления перекладины 11 с эластичной мембраной 10, как показано на фигуре 9. Благодаря этому она занимает минимум места, что облегчает транспортировку ввиду возможности складывания.
Более того, благодаря двум первым корпусам 6, которые формируют две первые ножки 4, соединенные с первой рамой 3, которая удерживает стеклянную панель 8, а также третьим корпусам 15, которые формируют вторые ножки 13, подвижно соединенные с парой платформ 12 вдоль стороны, противоположной стороне подвижного крепления к первой раме 3, как указано, высота узла второй переносной конструкции 2’ может регулироваться до необходимого уровня при развертывании в рабочее положение.
Когда вторая переносная конструкция 2’ находится в развернутом рабочем положении, как показано на фигуре 5, пациент может становиться сверху, помещая подлежащую сканированию ступню на эластичную мембрану 10 до момента прикосновения к стеклянной панели 8, выполненной в виде прозрачного дна или упора, и выполняя сканирование с помощью датчика глубины 1 или аналогичного мобильного устройства, размещенного внизу, при этом другая ступня будет опираться на одну из платформ 12, и когда сканирование будет завершено, пациенту или пользователю потребуется только изменить положение стопы. Таким образом, пациент или пользователь помещает отсканированную стопу на платформу 12, а другую стопу, находящуюся на платформе 12, помещает на мембрану 10, наступая на нее до прикосновения к стеклянной панели 8, выполненной в виде прозрачного дна или упора, чтобы выполнить соответствующее сканирование.
Более того, первые ножки 4 и вторые ножки 13, подвижно соединенные с парой платформ 12, внизу заканчиваются соответствующими опорными основаниями 16, подвижно соединенными с соответствующими поворотными осями 14, обеспечивая возможность вращения конструкции до 45°, облегчая сканирование стоп под определенным углом.
Следовательно, когда обстоятельства требуют изменения расположения места сканирования, вторую конструкцию 2' можно будет сложить и переместить в нужное место вместе с соответствующим датчиком глубины 1, который, как указано, может определяться как переносной ПК или аналогичные средства. Захват изображения подошвы можно выполнять в любом необходимом месте благодаря легкости транспортировки.
Высота первых корпусов 6 и вторых корпусов 7, которые формируют первые ножки 4, и третьих корпусов 15, которых формируют вторые ножки 13, может регулироваться методом, известным в данной области техники, например, с помощью ряда отверстий, совпадающих с соответствующими отверстиями в трубчатом центральном корпусе 5, а также соответствующих элементов, вставляющихся в них, или посредством любых других средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕЛЬКИ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ОБРАЗА ПОДОШВЫ | 2009 |
|
RU2485889C2 |
| Устройство для вытяжения позвоночника | 2019 |
|
RU2712312C1 |
| Складная опора | 2022 |
|
RU2785108C1 |
| УСТРОЙСТВО ГОРИЗОНТИРОВАНИЯ | 2023 |
|
RU2806130C1 |
| ПОРТАТИВНЫЙ БАЛЕТНЫЙ СТАНОК ДЛЯ УПРАЖНЕНИЙ | 2015 |
|
RU2667298C1 |
| Трансформируемая тележка | 1990 |
|
SU1771669A1 |
| Способ создания и приведения в рабочее положение раскладной рамы устройства и варианты устройств с платформой, со съёмными подвижными и неподвижными опорами, на основе данного способа | 2024 |
|
RU2837095C1 |
| УЗЕЛ ЭЛЕКТРОННОГО ПРОЖЕКТОРА ДЛЯ ИСПОЛЬЗОВАНИЯ В ЦВЕТНОЙ ЭЛЕКТРОННО-ЛУЧЕВОЙ ТРУБКЕ | 1989 |
|
RU2010387C1 |
| ГЛАДИЛЬНАЯ СТАНЦИЯ, ОСНОВАНИЕ И УТЮГ ДЛЯ ГЛАДИЛЬНОЙ СТАНЦИИ | 2010 |
|
RU2519561C2 |
| КОМПЛЕКТ УСТРОЙСТВ ДЛЯ ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ И ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2804683C1 |
Изобретение относится к медицине, а именно к системе фиксации изображения стопы. Система включает датчик глубины и переносную конструкцию. Датчик глубины выполнен с возможностью фиксации трехмерного изображения. Переносная конструкция характеризуется наличием первых ножек, первой рамы и эластичной мембраны. Первые ножки сформированы трубчатым центральным корпусом, который покрывает первый корпус и второй корпус соответственно на каждом конце. Первая рама удерживает стеклянную панель, соединенную с трубчатым центральным корпусом первых ножек. Эластичная мембрана соединена со вторым корпусом первых ножек. Положение первого корпуса и второго корпуса относительно трубчатого центрального корпуса может регулироваться. Эластичная мембрана выполнена с возможностью размещения на ней стопы, изображение подошвы которой необходимо получить, с возможностью соприкосновения со стеклянной панелью первой рамы, на которой выполняется сканирование. Достигается возможность регулировки по высоте стеклянной панели, на которой выполняется сканирование, при одновременной возможности регулировки расстояния между рамой, которая удерживает эластичную мембрану, и стеклянной панелью. 7 з.п. ф-лы, 12 ил.
1. Система фиксации изображения стопы, характеризующаяся тем, что включает:
- датчик глубины (1), выполненный с возможностью фиксации трехмерного изображения, и
- переносную конструкцию (2, 2’), которая характеризуется наличием:
- первых ножек (4), сформированных трубчатым центральным корпусом (5), которые покрывают первый корпус (6) и второй корпус (7) соответственно на каждом конце;
- первой рамы (3), которая удерживает стеклянную панель (8), соединенную с трубчатым центральным корпусом (5) первых ножек (4), и
- эластичной мембраны (10), соединенной со вторым корпусом (7) первых ножек (4), при этом:
- положение первого корпуса (6) и второго корпуса (7) относительно трубчатого центрального корпуса (5) может регулироваться, и
- эластичная мембрана (10) выполнена с возможностью размещения на ней стопы, изображение подошвы которой необходимо получить, с возможностью соприкосновения со стеклянной панелью (8) первой рамы (3), на которой выполняется сканирование.
2. Система фиксации изображения стопы по п. 1, отличающаяся тем, что эластичная мембрана (10) зафиксирована на второй раме (9), которая прикреплена ко вторым корпусам (7) первых ножек (4); расстояние до первой рамы (3) можно регулировать.
3. Система фиксации изображения стопы по п. 1, отличающаяся тем, что эластичная мембрана (10) прикреплена к паре параллельных перекладин (11), которые прикреплены ко вторым корпусам (7) первых ножек (4), обеспечивая возможность регулировать натяжение эластичной мембраны (10), при этом расстояние до первой рамы (3) можно регулировать.
4. Система фиксации изображения стопы по п. 2 или 3, отличающаяся тем, что узел, образованный эластичной мембраной (10) и первой рамой (3), выполнен с возможностью регулировки по высоте посредством регулировки первых корпусов (6) относительно трубчатого центрального корпуса (5), который формирует первые ножки (4).
5. Система фиксации изображения стопы по п. 2 или 3, отличающаяся тем, что эластичная мембрана (10) выполнена с возможностью регулировки по высоте относительно первой рамы (3) посредством регулировки вторых корпусов (7) относительно трубчатого центрального корпуса (5), который образует первые ножки (4).
6. Система фиксации изображения стопы по п. 2 или 3, отличающаяся тем, что включает пару платформ (12), подвижно соединенных с двумя противоположными сторонами первой рамы (3), при этом каждая из платформ (12), в свою очередь, включает на стороне, противоположной откидной стороне, пару вторых ножек (13), которые подвижно соединены посредством поворотных осей (14) с соответствующей платформой (12).
7. Система фиксации изображения стопы по п. 6, отличающаяся тем, что вторые ножки (13) включают вставленный в них третий корпус (15) с возможностью регулировки, что делает вторые ножки регулируемыми по высоте.
8. Система фиксации изображения стопы по п. 7, отличающаяся тем, что первые корпуса (6) и третьи корпуса (15) оснащены соответствующими опорными основаниями (16), подвижно соединенными с помощью поворотных осей (14).
| US 2011313321 A1, 22.12.2011 | |||
| Игла для сапожного производства | 1930 |
|
SU23749A1 |
| US 20140276094 A1, 18.09.2014 | |||
| US 20170360298 A1, 21.12.2017 | |||
| Пневматический вакуумметр | 1938 |
|
SU54751A1 |

