Изобретение относится к медицине, средствам спасательных служб, самоходным и приводимым вручную транспортным средствам, предметам домашнего и туристического обихода и ряда других устройств, в основе которых заложено техническое решение с компактной раскладной рамой.
В техническом решении по изобретению на способ создания раскладной силовой рамы устройств и вариантов устройств, предлагается силовую раму собирать из плоских линейных элементов, соединённых между собой, при переноске и хранении упакованных в несколько плоских компактных пакетов. А при приведении в рабочее положение силовой рамы устройства - разворачиваются в соединённые между собой, линейные элементы образующие замкнутый контур, необходимой конфигурации, создавая основу конструкции устройства.
Из современного уровня техники известна «Многофункциональная тележка для транспортировки пострадавшего» RU (11) 221 124 (13) U1 Автор(ы):Семенов Константин Денисович (RU, Ляпустин Алексей Сергеевич (RU), Зверев Евгений Владиславович (RU). Полезная модель относится к устройству транспортировки малоподвижных или пострадавших людей. Технический результат заключается в способности транспортировки пострадавших в различных направлениях движения тележки (против и по направлению движения). Технический результат достигается тем, многофункциональная тележка для транспортировки пострадавшего, состоящая из трёх рамных конструкций, обтянутых брезентом, соединённых между собой с помощью шарнирных механизмов, образующих площадку для размещения транспортируемого, с установленными колёсами на средней рамной конструкции, над которыми размещаются грязезащитные крылья, на двух крайних рамных конструкциях установлены подставки для установки тележки на твёрдой поверхности, согласно полезной модели на задней части передней рамной конструкции установлена направляющая с пазами для фиксации положения ручки с помощью упора, один конец которого жёстко закреплён на ручке, второй конец вставляется в паз направляющей в зависимости от высоты поднятия передней рамной конструкции. Недостатком данной конструкции по отношению к предлагаемому - большие габариты в не рабочем положении. По отношению предлагаемому техническому решению является - аналогом.
Из современного уровня техники известна «ТэТэ» (Тележка Филатова) - вспомогательное транспортное средство для бойцов в ближнем тылу и возле передовой. Ссылка https://руни.рф/ТЭТЭ Материал из энциклопедии Руниверсалис. Привод - ручная сила и регулируемый электрический. Предназначена для эвакуации с поля боя раненых и убитых бойцов. А также сокращения потерь групп эвакуации за счет кратного уменьшения численности групп и косвенного снижения потерь благодаря меньшей заметности. Недостатком данной конструкции по отношению к предлагаемому - большие габариты в не рабочем положении и недостаточные функциональные возможности. По отношению к предлагаемому техническому решению является - аналогом.
Из современного уровня техники известны - носилки корабельные складные. Ссылка https://бмэ.орг/index.php/НОСИЛКИ Большая Медицинская Энциклопедия. Носилки. Носилки корабельные складные предназначены для переноски пострадавших с боевых постов в медпункт на подводных лодках, надводных кораблях и других плавсредствах, a также для транспортирования до военно-морского госпиталя. Носилки состоят из двух сварных металлических трубчатых рам, перфорированного ложа, съемного поролонового матраца и чехла. В центральной части носилок имеются лямки для закрепления пострадавшего. К скатам трубчатой рамы может крепиться строп типа «Паук», необходимый при подъеме носилок, крановыми устройствами. Благодаря поперечному шарниру носилки корабельные складываются. Ручки носилок откидные и могут использоваться как ножки при установке носилок в эвакосредствах; для их закрепления в этом положении имеется полуавтоматический стопор. Недостатком данной конструкции по отношению к предлагаемому - большие габариты в не рабочем положении и недостаточные функциональные возможности. По отношению предлагаемому техническому решению является - прототипом.
Цель и задача заявленного изобретения.
1. Создать способ создания жёсткой рамы для устройств из линейных плоских элементов, компактно собранных при переноске и хранении в пакет и переносимым в частности человеком.
2. На основе способа выполнить компактные устройства следующего наименования и назначения:
*Медицинские носилки, каркасного типа, для переноски больных, эвакуации раненых при катастрофах и эвакуации раненых при ведении боевых действий.
*Компактные раскладные кровати и лежаки предназначенных для военнослужащих и туристов.
*Компактные транспортные тележки, предназначенные как для перевозки грузов, так и медицинских носилок, с ручным или электрическим приводом, имеющие опору на колеса или гусеницы. Причём, тележки в собранном состоянии, имеют возможность переноситься человеком.
Поставленная задача достигается тем, что по периметру заданного размера, например носилок, образующего в данном случае прямоугольник, составляется рама из плоских жёстких линейных элементов. Линейные элементы соединены между собой последовательно концами с помощью петель, например типа рояльных и собираются для переноски в плоский пакет наложением одного элемента на другой типа гармошки. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру.
Размер линейных элементов внутренней рамы выбирается из условий:
*в каждую из сторон прямоугольника входит одинаковое по длине количество линейных элементов,
*начало первого и конец последнего линейного элемента в раме, в рабочем положении, соединены между собой.
Размер линейных элементов внешней рамы выбираются из условий;
*каждый линейный элементы внешней рамы в рабочем положении перекрывает место сгиба элементов внутренней рамы.
*Соединенное количество линейных элементов внешней рамы, может не совпадать с количеством линейных элементов внутренней рамы и в развёрнутом состоянии состоять из нескольких кусков.
Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. Аналогично, возможно исполнение рам, треугольной, многоугольной, замкнутой или разомкнутой конфигураций. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Для повышения нагрузочной способности рамы из линейных элементов, линейные элементы выполнены с рёбрами жёсткости.
Используя, предложенный способ, получаем возможность создавать рамы устройств раскладного компактного типа, в частности переносимого человеком в ранце, в рюкзаке или в сумке и рассчитанной на значительные вертикальные нагрузки.
Выполненные на основе способа компактные устройства.
1. Медицинские носилки, каркасного типа, для переноски больных, эвакуации раненых при катастрофах и ведении боевых действий.
Носилки состоят из прямоугольной рамы, выполненной из жёстких, соединенных рояльными петлями, линейных элементов. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего линейного элемента во внутренней раме, в рабочем положении, соединены между собой. Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Соединенное количество линейных элементов внешней рамы, может не совпадать с количеством линейных элементов внутренней рамы и в развёрнутом состоянии составляются из нескольких кусков. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя и внешняя рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие «ленты-контакт» Велькро, то есть застёжка «липучка». Ложе носилок, выполнено из прочного гибкого материала, например ткани или сетки. Ложе носилок крепится к раме фиксирующими ремнями. Фиксирующие ремни одновременно стягивают дополнительно внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок, вдоль оси, установлены съёмные ручки. Съёмные ручки крепятся к раме, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки, имеют функции ножек при установке носилок на земле. Для этого ручки выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы. Съёмные ручки заканчиваются в местах захвата кистями рук кистевыми ручками. Для переноски, все элементы носилок в компактном сложенном виде размещаются в ранце.
Приведение носилок в рабочее положение. Из ранца достаются элементы носилок. Сложенная в гармошку, внутренняя рама разворачивается в размер, образуя прямоугольник, и соединяется начало и конец первого и последнего прямолинейного элемента быстросъёмным соединением. По внешнему периметру внутренней рамы, крепится застёжкой-«липучкой» внешние линейные элементы внешней рамы, с шагом перекрывающей линейными элементами внешней рамы места сгиба внутренней рамы. Начало и конец первого и последнего прямолинейного элемента внешней рамы соединяется быстросъёмным соединением. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями крепится ложе носилок, устанавливаются в сквозные отверстия рамы ручки носилок и устанавливается быстросъёмный фиксатор угла. Носилки готовы к использованию. Для установки носилок на ножки, ручки носилок поворачиваются и фиксируются с помощью поворотно-фиксирующих механизмов. Разборка носилок производится в обратном порядке.
2. Компактные раскладные кровати и лежаки, предназначенные для военнослужащих и туристов.
Компактные раскладные кровати и лежаки каркасного типа, состоят из прямоугольной рамы, выполненной из жёстких, соединенных рояльными петлями линейных элементов. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего линейного элемента во внешней и внутренней раме, в рабочем положении соединены между собой. Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя и внешняя рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие застёжки «липучки». Ложе кровати, выполнено из прочного гибкого материала, например ткани или сетки. Ложе крепится к раме фиксирующими ремнями. Фиксирующие ремни одновременно стягивают дополнительно внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. К раме, перпендикулярно плоскости кровати, крепятся четыре быстросъёмные съёмные ножки, выполненные, например, следующим образом - в верхней части ножек выполнен паз, в который входит рама кровати. Ножка закрепляется через сквозное отверстие, проходящее через тело паза и раму, проходящим через отверстие быстросъёмным соединением. Соединение ножек с рамой может быть иным известным в технике способом. Для переноски, все элементы кровати в компактном сложенном виде размещаются в рюкзаке или в переносной сумке.
Приведение кровати в рабочее положение. Из переносной сумки достаются элементы кровати. Сложенная в гармошку внутренняя рама разворачивается в размер, образуя прямоугольник, и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней рамы, крепится застёжкой-«липучкой» внешние линейные элементы внешней рамы, с шагом перекрывающей линейными элементами внешней рамы в местах сгиба внутренней рамы. Соединенное количество линейных элементов внешней рамы, может не совпадать с количеством линейных элементов внутренней рамы и в развёрнутом состоянии составляются из нескольких кусков. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями крепится ложе кровати, устанавливаются ножки кровати и в сквозные отверстия пропускается фиксирующий элемент быстросъёмного соединения. Кровать готова к использованию. Разборка кровати производится в обратном порядке.
3. Компактные транспортные тележки, предназначенные как для перевозки людей на медицинских носилках, так и грузов, с ручным или электрическим приводом, имеющие опору на колеса.
Компактные транспортные тележки представляют собой описанные выше медицинские носилки, дополненные съёмными колёсными опорами. При использовании ложе носилок в качестве платформы для перевозки грузов, с сочетанием усилением конструкции под большую грузоподъёмность, используется транспортная тележка под перевозку грузов. Причём узел съёмных колёсных опор крепится быстросъёмным соединением к развёрнутой раме носилок. Переносятся в ранце все элементы транспортной тележки, то есть вместе с комплектом разборных носилок, узлом колёсных опор и колёсами. Для эвакуации раненых, по пересечённой местности, предпочтительно транспортную тележку снабдить колесом большего диаметра, для повышения проходимости, а для незаметности - выполнить клиренс минимальным. Соответственно, для уменьшения усилия при транспортировке и повышения грузоподъёмности, транспортную тележку желательно снабдить электроприводом. По изобретению компактная транспортная тележка предлагается в двух колёсном варианте и четырёх колёсном варианте.
3.1. Двухколёсный вариант тележки содержит носилки, состоящие из прямоугольной рамы, выполненной из жёстких, соединенных рояльными петлями линейных элементов. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего линейного элемента внутренней рамы в рабочем положении соединены между собой. Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя и внешняя рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие застёжки «липучка». Ложе носилок, (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе носилок крепится к раме фиксирующими ремнями. Фиксирующие ремни одновременно стягивают дополнительно внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок, вдоль оси, установлены съёмные ручки. Съёмные ручки крепятся к раме, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки, имеют функции ножек при установке носилок на земле. Для этого ручки выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы. Дополнительно, пара ручек с одной из сторон, для применения в качестве ручек тележки, выполнена с дополнительными поворотно-фиксирующими механизмами в нижней области места захвата кистями рук. Съёмные ручки заканчиваются в местах захвата кистями рук кистевыми ручками. Носилки снабжены двумя съёмными колесами, расположенными по бокам носилок в средней части. Узел крепления колеса к раме выполнен следующим образом. Каждое колесо закреплено на оси быстросъёмным соединением. Ось колеса, жёстко закреплена с одного конца на трубчатом элементе, перпендикулярно. Другой конец трубчатого элемента соединен, например через отверстия болтовым соединением с пластиной съёмного пазового соединения с рамой носилок. Съёмное пазовое соединение выполнено из двух параллельных пластин соединённых с одного конца, с размером паза равным ширине рамы. Трубчатый элемент, выполненный в нижней части с отверстиями, позволяющими ступенчато изменять расстояние между осью колеса и пазовым соединением. Ось колеса и пазовое соединение перпендикулярны трубчатому элементу, параллельны между собой и расположены в разные стороны относительно трубчатого элемента. Узел крепления колеса к раме крепится быстросъёмным соединением, выполненным общеизвестным в технике способом. Для создания необходимого клиренса тележки, ось колеса может располагаться, ниже - выше или в плоскости носилок. При этом, при расположении оси максимально выше плоскости носилок клиренс будет минимальным, а при расположении оси максимально ниже плоскости носилок клиренс будет максимальным. Эта функция осуществляется ступенчатым изменением расстояния между осью колеса и пазовым соединением, с последующим креплением пазового соединения узла колеса к раме, пазом вверх или вниз. Для уменьшения усилия при транспортировке и повышения грузоподъёмности, транспортная тележка снабжена электроприводом. Отличие тележки с электроприводом от тележки с ручной тягой заключается в замене обычных колёс на колёса с электроприводом. Электропривод состоит из двух мотор колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Компоненты электропривода навешиваются на транспортную тележку быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
Приведение транспортной тележки в рабочее положение. Из переносной сумки достаются элементы носилок, узлы крепления колёс и колёса. Сложенная в гармошку, внутренняя рама носилок разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента . По внешнему периметру внутренней рамы, крепится застёжкой- «липучкой» внешние линейные элементы внешней рамы, с шагом перекрывающей линейными элементами внешней рамы места сгиба внутренней рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями крепится ложе носилок, устанавливаются в сквозные отверстия рамы ручки носилок и быстросъёмный фиксатор угла. По бокам носилок, в средней части, быстросъёмным соединением крепятся узлы опоры колёс, устанавливаются и фиксируются колеса. Устанавливается пара ручек, предназначенная и для транспортной тележки. Устанавливаются с помощью двух поворотно-фиксирующих механизмов, в нижней и верхней области ручки, удобные для перевозки тележки углы. При наличии электропривода, устанавливаются мотор- колёса вместо обычных колёс. Навешиваются элементы электропривода на транспортную тележку, и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
3.2. Четырёхколёсный вариант содержит носилки, состоящие из прямоугольной рамы, выполненной из жёстких, соединенных рояльными петлями линейных элементов. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента внутренней рамы, в рабочем положении соединены между собой. Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя и внешняя рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие застёжки «липучка». Ложе носилок, (платформы тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе носилок крепится к раме фиксирующими ремнями. Фиксирующие ремни одновременно стягивают дополнительно внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски, вдоль оси, носилок установлены съёмные ручки. Съёмные ручки крепятся к раме, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки, имеют функции ножек при установке носилок на земле. Для этого ручки выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы. Дополнительно, пара ручек с одной из сторон, для применения в качестве ручек тележки, выполнена с дополнительными поворотно-фиксирующими механизмами в нижней области места захвата кистями рук. Съёмные ручки заканчиваются в местах захвата кистями рук кистевыми ручками. Носилки снабжены четырьмя съёмными мотор-колесами, расположенными по бокам носилок. Узел крепления мотор-колеса к раме выполнен следующим образом. Каждое колесо закреплено на оси быстросъёмным соединением. Ось колеса, жёстко закреплена с одного конца на трубчатом элементе, перпендикулярно к элементу. Другой конец трубчатого элемента соединен, например, через отверстия болтовым соединением с пластиной съёмного пазового соединения с рамой носилок. Съёмное пазовое соединение выполнено из двух параллельных пластин соединённых с одного конца, с размером паза равным ширине рамы. Трубчатый элемент, выполненный в нижней части с отверстиями, позволяющими ступенчато изменять расстояние между осью колеса и пазовым соединением. Ось колеса и пазовое соединение перпендикулярны трубчатому элементу, параллельны между собой и расположены в разные стороны относительно трубчатого элемента. Узел крепления колеса к раме крепится быстросъёмным соединением, выполненным общеизвестным в технике способом. Для создания необходимого клиренса тележки, ось колеса может располагаться, ниже - выше или в плоскости носилок. При этом, при расположении оси максимально выше плоскости носилок клиренс будет минимальным, а при расположении оси максимально ниже плоскости носилок клиренс будет максимальным. Эта функция осуществляется ступенчатым изменением расстояния между осью колеса и пазовым соединением, с последующим креплением пазового соединения узла колеса к раме, пазом вверх или вниз. Комплектация транспортной тележки электроприводом способствует уменьшению усилия при транспортировке и повышения грузоподъёмности. Электропривод состоит из четырёх мотор колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Компоненты электропривода навешиваются на транспортную тележку быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Повороты транспортной тележки осуществляется торможением колес с одной из сторон и вращением колёс с другой стороны. Разворот тележки может осуществляться вращением колёс, находящихся по разным сторонам, в противоположном направлении. Кроме того, возможно управление транспортной тележки с помощью пульта управления, или при установке системы роботизированного управления с телекамерой и очков виртуальной реальности - дистанционно, что позволяет перевозить раненых, навешивать на тележку различное оборудование и управлять оборудованием и тележкой дистанционно. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце или рюкзаке или в переносной сумке.
Приведение транспортной тележки в рабочее положение. Из переносной сумки достаются элементы носилок, узлы крепления колёс и колёса. Сложенная в гармошку, внутренняя рама носилок разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней рамы, крепится застёжкой-«липучкой» внешние линейные элементы внешней рамы, с шагом перекрывающей линейными элементами внешней рамы места сгиба внутренней рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями крепится ложе носилок, устанавливаются в сквозные отверстия рамы ручки носилок и быстросъёмный фиксатор угла. По бокам носилок, в средней части, быстросъёмным соединением крепятся узлы опоры колёс, устанавливаются и фиксируются колеса. Устанавливается пара ручек, предназначенная и для транспортной тележки. Устанавливаются с помощью двух поворотно-фиксирующих механизмов, в нижней и верхней области ручки, удобные для перевозки тележки углы. Устанавливаются мотор-колёса. Навешиваются элементы электропривода на транспортную тележку и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
4. Компактные транспортные тележки, предназначенные как для перевозки людей на медицинских носилках, так и грузов, с ручным или электрическим приводом, имеющие опору на гусеницы.
Компактные транспортные тележки, представляют собой описанные выше медицинские носилки, дополненные съёмными гусеничными опорами. При использовании ложе носилок в качестве платформы для перевозки грузов, с сочетанием усилением конструкции под большую грузоподъёмность, используем транспортную тележку под перевозку грузов. Причём узел съёмных гусеничных опор крепится быстросъёмным соединением к развёрнутой раме носилок. Переносятся в ранце все элементы транспортной тележки, то есть вместе с комплектом разборных носилок, узлом гусеничных опор и гусеницами. Для эвакуации раненых, по пересечённой местности, предпочтительно транспортную тележку, для повышения проходимости и незаметности, выполнить клиренс минимальным. Кроме того, для прохождения тележки по узким тропинкам, необходимо расположить гусеничные опоры возможно ближе к центральной оси тележки без нарушения устойчивости тележки. Соответственно, для уменьшения усилия при транспортировке и повышения грузоподъёмности, транспортную тележку желательно снабдить электроприводом. По изобретению компактная транспортная тележка на гусеничных опорах предлагается в трёх гусеничном варианте и четырёх гусеничном варианте.
4.1. Трёхгусеничный вариант тележки содержит носилки, состоящие из прямоугольной рамы, выполненной из жёстких, соединенных рояльными петлями линейных элементов. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента внутренней рамы, в рабочем положении соединены между собой. Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя и внешняя рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие застёжки «липучка». Ложе носилок (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе носилок крепится к раме фиксирующими ремнями. Фиксирующие ремни одновременно стягивают дополнительно внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски, вдоль оси, носилок установлены съёмные ручки. Съёмные ручки крепятся к раме, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки, имеют функции ножек при установке носилок на земле. Для этого ручки выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы. Дополнительно, пара ручек с одной из сторон, для применения в качестве ручек тележки, выполнена с дополнительными поворотно-фиксирующими механизмами в нижней области места захвата кистями рук. Съёмные ручки заканчиваются в местах захвата кистями рук кистевыми ручками. Носилки снабжены тремя съёмными гусеничными опорами. Две гусеничные опоры закреплены на раме в задней части носилок быстросъёмным соединением, причём крепление регулируемое и позволяет установить гусеничные опоры на различном расстоянии от центральной оси носилок. Одна гусеничная крепится быстросъёмным соединением на раме в передней части по центральной оси тележки. Передняя гусеничная опора выполнена поворотной на оси, в горизонтальной плоскости. Для поворота гусеничной опоры применяются пара ручек носилок в качестве ручек тележки, которая выполнена с двумя поворотно-фиксирующими механизмами выполненных с двух сторон ручки, в нижней области вместе крепления и в месте захвата кистями рук и соединена быстросъёмным соединением с гусеничной опорой. Гусеничные опоры выполнены; размером позволяющим переносить их в ранце человеком, с электроприводом или без электропривода. Применение в транспортной тележке гусеничных опор без электропривода оправдано тем, что в сравнении со способом переноски травмированного человека на носилках - волокушах, сопротивление перемещения с помощью гусеничных опор меньше, а клиренс сопоставим с носилками-волокушами. Установка электропривода возможна; на одной передней гусеничной опоре, на двух задних гусеничных опорах или на трёх гусеничных опорах. Гусеничная опора без электропривода состоит из П- образной рамы на которой в нижней части закреплены на осях опорные катки на которые натянута гусеничная лента. В верхней части П-образной рамы, в средней части выполнена ось вращения, проходящая вдоль пазового соединения крепления к раме, и выполнена в верхней части к П-образной раме перпендикулярно. С помощью пазового соединения гусеничные опоры крепятся к раме носилок быстросъёмным соединением, например через отверстия в раме и пазовом соединении. Причём рама носилок входит в паз пазового соединения. Ось вращения, установленная в верхней части перпендикулярно к П-образной рамы гусеничных опор, позволяет при движении тележки осуществлять опору всей нижней поверхностью гусеницы. На передней гусеничной опоре выполнен быстросъёмный узел крепления ручек транспортировки. Электропривод гусеничной опоры, как вариант, с установкой в опорном катке (опорных катках) электродвигателей выполненных как мотор-колесо. Электропривод состоит мотор колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Компоненты электропривода навешиваются на транспортную тележку быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Для работы транспортной тележки в зимних условиях возможно использование в качестве опор лыжи. В варианте без электропривода используется три лыжи. В варианте с электроприводом возможно следующее сочетание; передняя лыжа - две задних гусеничные опоры, передняя гусеничная опора - две задние лыжи. Узел крепление лыж к раме аналогичен креплению гусеничных опор. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
Приведение транспортной тележки в рабочее положение. Из переносной сумки достаются элементы носилок и гусеничные опоры. Сложенная в гармошку, внутренняя рама носилок разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней рамы, крепится застёжкой-«липучкой» внешние линейные элементы внешней рамы, с шагом перекрывающей линейными элементами внешней рамы места сгиба внутренней рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями крепится ложе носилок, и быстросъёмный фиксатор угла. В передней части рамы носилок, по центру, с помощью пазового соединения, быстросъёмным соединением крепится гусеничная опора. К гусеничной опоре крепятся ручки транспортировки. С задней части рамы носилок крепятся быстросъёмным соединением две гусеничные опоры с необходимым расстоянием, определяемым режимом передвижения, между собой. При наличии электропривода, навешиваются элементы электропривода на транспортную тележку и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
4.2. Четырёхгусеничный вариант содержит носилки, состоящие из прямоугольной рамы, выполненной из жёстких, соединенных рояльными петлями линейных элементов. Рама составлена из двух отдельных прямоугольников, из внутреннего и наружного. Внутренняя и наружная рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента внутренней рамы, в рабочем положении соединены между собой. Линейные элементы, внутренней и внешней рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями. Между собой, внутренняя и внешняя рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя и внешняя рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие застёжки «липучка». Ложе носилок (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе носилок крепится к раме фиксирующими ремнями. Фиксирующие ремни, одновременно стягивают дополнительно, внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок, при необходимости вдоль оси, устанавливаются съёмные ручки. Съёмные ручки крепятся к раме, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки, имеют функции ножек при установке носилок на земле. Для этого ручки выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы. Дополнительно, пара ручек с одной из сторон, для применения в качестве ручек тележки, выполнена с дополнительными поворотно-фиксирующими механизмами в нижней области места захвата кистями рук. Съёмные ручки заканчиваются в местах захвата кистями рук кистевыми ручками. Носилки снабжены четырьмя съёмными гусеничными опорами. Гусеничные опоры, парами, закреплены на раме в задней и передней части носилок быстросъёмным соединением, причём крепление регулируемое и позволяет установить гусеничные опоры на различном расстоянии от центральной оси носилок. Для сопровождения транспортной тележки. применяются пара ручек носилок в качестве ручек тележки. Ручки тележки выполнена с двумя поворотно-фиксирующими механизмами, в нижней области вместе крепления и в месте захвата кистями рук и соединена быстросъёмным соединением с рамой. Гусеничные опоры выполнены; размером позволяющим переносить их в ранце человеком и с электроприводом на все четыре гусеничные опоры.
Гусеничная опора состоит из П- образной рамы на которой в нижней части закреплены на осях опорные катки на которые натянута гусеничная лента. В верхней части П-образной рамы, в средней части выполнена ось вращения, проходящая вдоль пазового соединения крепления к раме и выполненных в верхней части перпендикулярно к П-образной рамы. С помощью пазового соединения гусеничные опоры крепятся к раме носилок быстросъёмным соединением, например через отверстия в раме и пазовом соединении. Причём рама носилок входит в паз пазового соединения. Ось вращения, установленная в верхней части перпендикулярно к П-образной рамы гусеничных опор, позволяет при движении тележки осуществлять опору всей нижней поверхностью гусеницы. Электропривод гусеничной опоры, как вариант, с установкой в опорных катках электродвигателей выполненных как мотор-колесо. Электропривод состоит из мотор-колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Повороты транспортной тележки осуществляется торможением гусениц с одной из сторон и движением гусениц с другой стороны. Разворот тележки может осуществляться движением гусениц, находящихся по разным сторонам, в противоположном направлении. Кроме того, возможно управление транспортной тележки с помощью пульта управления, или при установке телекамеры и применение дистанционной системы управления с очками виртуальной реальности - дистанционно. Это позволяет перевозить раненых, навешивать на тележку различное оборудование и управлять оборудованием и тележкой дистанционно. Компоненты электропривода навешиваются на транспортную тележку быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
Приведение транспортной тележки в рабочее положение. Из переносной сумки достаются элементы носилок и гусеничные опоры. Сложенная в гармошку, внутренняя рама носилок разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней рамы, крепится застёжкой-«липучкой» внешние линейные элементы внешней рамы, с шагом перекрывающей линейными элементами внешней рамы места сгиба внутренней рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями крепится ложе носилок и устанавливаются быстросъёмный фиксатор угла. В передней части рамы носилок, по центру, с помощью пазового соединения, быстросъёмным соединением крепится гусеничная опора. К гусеничной опоре крепятся ручки транспортировки. С задней части рамы носилок крепятся быстросъёмным соединением две гусеничные опоры с необходимым расстоянием, определяемым режимом передвижения, между собой. При наличии электропривода, навешиваются элементы электропривода на транспортную тележку и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
На листе 1 изображены
1. Фиг. 1 развернутые внутренняя и внешняя рамы.
2. Фиг. 2 сборка внутренней и внешней рамы.
3. Фиг. 3 изображена общая рама в собранном виде. Вид сверху.
4. Фиг. 4 изображён соединительный элемент быстросъёмного соединения. Вид спереди.
5. Фиг. 5 изображён соединительный элемент быстросъёмного соединения. Вид сбоку
6. Фиг. 6 изображено быстросъёмное соединение. Вид спереди.
7. Фиг. 7 разрез А-А Быстросъёмного соединения.
На листе 2 изображены:
8. Фиг. 8 носилки. Вид сверху.
9. Фиг. 9 носилки. Вид сбоку.
10. Фиг. 10 носилки с установкой на земле.
11. Фиг. 11 раскладная кровать (лежак). Вид сбоку.
12. Фиг. 12 двухколёсная тележка с осью колеса расположенного выше плоскости носилок. Вид сбоку.
На листе 3 изображены:
13. Фиг. 13 двухколёсная тележка с осью колеса расположенного ниже плоскости носилок. Вид сбоку.
14. Фиг. 14 узел крепления колеса к раме. Разрез Б-Б.
15. Фиг. 15 узел крепления колеса к раме. Вид спереди.
16. Фиг. 16 четырёхколесная тележка с осью колеса расположенного выше плоскости носилок. Вид сбоку.
На листе 4 изображены:
17. Транспортная тележка с тремя гусеничными опорами. Вид сверху.
18. Транспортная тележка с четырьмя гусеничными опорами. Вид сверху.
19. Гусеничная опора. Вид сбоку.
20. Узел поворота передней гусеничной опоры. Разрез В-В.
Способ создания раскладной жёсткой рамы из линейных элементов.
Пример создания (Фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7); по периметру заданного размера, например образующего в данном случае прямоугольник, составляется рама 1 из плоских жёстких линейных элементов 2. Линейные элементы 1 соединены между собой последовательно концами с помощью петель 3, например типа рояльных и собираются для переноски в плоский пакет наложением одного элемента на другой типа гармошки (фиг. 2). Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5. Внутренняя 4 и наружная рамы 5 плотно соприкасаются друг с другом по всему периметру. Размер линейных элементов внутренней рамы 4 выбираются из условий;
*в каждую из сторон прямоугольника входит целое количество линейных элементов 2,
*начало первого и конец последнего линейного элемента 2 в раме 4, в рабочем положении, соединены между.
Размер линейных элементов внешней рамы 5 выбираются из условий;
*каждый линейный элемент2 внешней рамы 5 в рабочем положении перекрывает место сгиба элементов 2 внутренней рамы 4,
*Соединенное количество линейных элементов внешней рамы 5, может не совпадать с количеством линейных элементов внутренней рамы 4 и в развёрнутом состоянии состоять из нескольких кусков.
Линейные элементы 2, внутренней 4 и внешней рамы 5 по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями 3. Между собой, внутренняя 4 и внешняя рамы 5, по всему периметру закрепляются быстросъёмными соединениями 6 с фиксацией положения.
Выполненные на основе способа компактные устройства.
1. Медицинские носилки, каркасного типа, для переноски больных, эвакуации раненых при катастрофах и ведении боевых действий. Носилки 7 (фиг. 3, фиг. 8, фиг. 9 и фиг. 10) состоят из прямоугольной рамы 1, выполненной из жёстких, соединенных рояльными петлями 3, линейных элементов 2. Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5. Внутренняя 4 и наружная 5 рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего линейного элемента во внутренней раме 4, в рабочем положении соединены между собой. Линейные элементы 2, внутренней 4 и внешней 5 рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника в местах соединений элементов петлями 3, то есть линейный элемент 2 накладывается целой частью на место соединения линейных элементов другой рамы. То есть, происходит взаимное перекрытие мест соединений петлями 3 линейными элементами 2 рамы 4 и рамы 5.Соединенное количество линейных элементов внешней рамы 5, может не совпадать с количеством линейных элементов внутренней рамы 4 и в развёрнутом состоянии составляются из нескольких кусков. Между собой, внутренняя 4 и внешняя 5 рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы 1 в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя 4 и внешняя 5 рамы 1, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие «ленты-контакт» Велькро 8, то есть застёжки «липучка» 8. Ложе 9 носилок 7, выполнено из прочного гибкого материала, например ткани или сетки. Ложе 9 носилок 7 крепится к раме 1 фиксирующими ремнями 10. Фиксирующие ремни 10 одновременно стягивают дополнительно внутреннюю 4 и внешнюю 5 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений 6, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок, вдоль оси, установлены съёмные ручки 11. Съёмные ручки 11 крепятся к раме 1, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки 11, имеют функции ножек при установке носилок 7 на земле. Для этого ручки выполнены с возможностью поворота части элемента ручки 11 под углом к плоскости носилок 7, для этого в месте поворота установлены поворотно-фиксирующие механизмы 12. Съёмные ручки 11 заканчиваются в местах захвата кистями рук кистевыми ручками 13. Для переноски, все элементы носилок в компактном сложенном виде размещаются в ранце. Приведение носилок 7 в рабочее положение. Из ранца достаются элементы носилок 7. Сложенная в гармошку, внутренняя рама 4 разворачивается в размер, образуя прямоугольник, и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней рамы 4, крепится застёжкой-«липучкой» 8, линейные элементы 2 внешней рамы 5, с шагом перекрывающей линейными элементами внешней рамы 5 места сгиба внутренней рамы 4. Начало и конец первого и последнего прямолинейного элемента 2 внешней рамы 5 соединяется быстросъёмным соединением 6 или 8. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями 10 крепится ложе 9 носилок 7, устанавливаются в сквозные отверстия рамы 1 ручки носилок 11 и быстросъёмный фиксатор угла. Носилки 7 готовы к использованию. Для установки носилок на ножки, ручки носилок 11 поворачиваются и фиксируются с помощью поворотно-фиксирующих механизмов 12. Разборка носилок производится в обратном порядке.
2. Компактные раскладные кровати и лежаки, предназначенные для военнослужащих и туристов. Компактные раскладные кровати 14 и лежаки каркасного типа (фиг. 3, фиг. 8 и фиг. 11), состоят из прямоугольной рамы 1, выполненной из жёстких, соединенных рояльными петлями 3 линейных элементов 2. Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5. Внутренняя 4 и наружная 5 рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего линейного элемента 2 во внешней 4 и внутренней раме 5, в рабочем положении соединены между собой. Линейные элементы 2, внутренней 4 и внешней 5 рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями 3, то есть линейный элемент 2 накладывается целой частью на место соединения линейных элементов другой рамы. То есть, происходит взаимное перекрытие мест соединений петлями 3 линейными элементами 2 рамы 4 и рамы 5. Между собой, внутренняя 4 и внешняя 5 рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы 1 в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя 4 и внешняя рамы 5, как вариант, соединяются следующим образом: на внешнюю сторону внутренней 4 и внутреннюю сторону внешней 5 рам закрепляется составляющие застёжки «липучки» 8. Ложе 9 кровати 14, выполнено из прочного гибкого материала, например ткани или сетки. Ложе 9 крепится к раме 1 фиксирующими ремнями 10. Фиксирующие ремни 10, одновременно стягивают дополнительно, внутреннюю 4 и внешнюю 5 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений 6, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. К раме 1, перпендикулярно плоскости кровати 14, крепятся четыре быстросъёмные съёмные ножки 15. Выполненные, например, следующим образом - в верхней части ножек 15 выполнен паз, в который входит рама 1 кровати 14. Ножка закрепляется через сквозное отверстие, проходящее через тело паза и раму 1, проходящим через отверстие быстросъёмным соединением 6. Соединение ножек 15 с рамой1 может быть иным известным в технике способом. Для переноски, все элементы кровати в компактном сложенном виде размещаются в рюкзаке или в переносной сумке. Приведение кровати 14 в рабочее положение. Из переносной сумки достаются элементы кровати 14. Сложенная в гармошку, внутренняя рама 4 разворачивается в размер, образуя прямоугольник, и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней рамы 4, крепится застёжкой-«липучкой» 8 внешние линейные элементы 2 внешней5 рамы, с шагом перекрывающей линейными элементами 2 внешней 5 рамы в местах сгиба внутренней4 рамы. Соединенное количество линейных элементов 2 внешней 5 рамы, может не совпадать с количеством линейных элементов 2 внутренней рамы 4 и в развёрнутом состоянии составляются из нескольких кусков. Соединение двух рам, возможно с помощью быстросъёмных соединений 6, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями10 крепится ложе 9 кровати 14, устанавливаются ножки 15 кровати 14 и в сквозные отверстия пропускается фиксирующий элемент 6 быстросъёмного соединения. Кровать 14 готова к использованию. Разборка кровати производится в обратном порядке.
3. Компактные транспортные тележки, предназначенные как для перевозки людей на медицинских носилках, так и грузов, с ручным или электрическим приводом, имеющие опору на колеса.
3.1. Двух колёсный вариант тележки 16 (фиг. 12, фиг. 13, фиг. 14 и фиг. 15) содержит носилки 7, состоящие из прямоугольной рамы 1, выполненной из жёстких, соединенных рояльными петлями 3 линейных элементов 2. Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5. Внутренняя 4 и наружная 5 рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента внутренней рамы 4, в рабочем положении соединены между собой. Линейные элементы 2, внутренней 4 и внешней 5 рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов 2 петлями 3, то есть линейный элемент 2 накладывается целой частью на место соединения линейных элементов другой рамы. То есть, происходит взаимное перекрытие мест соединений петлями 3 линейными элементами 2 рамы 4 и рамы 5. Между собой, внутренняя 4 и внешняя 5 рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя 4 и внешняя 5 рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней 4 и внутреннюю сторону внешней 5 рам закрепляется составляющие застёжки «липучка» 8. Ложе 9 носилок 7 (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе 9 носилок 7 крепится к раме 1 фиксирующими ремнями. Фиксирующие ремни, одновременно стягивают дополнительно, внутреннюю 4 и внешнюю 5 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок, при необходимости, вдоль оси, установлены съёмные ручки 11. Съёмные ручки крепятся к раме 1, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки11, имеют функции ножек при установке носилок на земле. Для этого ручки 11 выполнены с возможностью поворота части элемента ручки 11 под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы 12. Дополнительно, пара ручек с одной из сторон, для применения в качестве ручек 11 тележки 16, выполнена с дополнительными поворотно-фиксирующими механизмами 17 в нижней области места захвата кистями рук. Съёмные ручки 11 заканчиваются в местах захвата кистями рук кистевыми ручками 13. Носилки 7 снабжены двумя съёмными колесами 18 , расположенными по бокам носилок 7 в средней части. Узел крепления колеса 18 к раме 1 выполнен следующим образом. Каждое колесо 18 закреплено на оси 19 быстросъёмным соединением. Ось колеса 19, жёстко закреплена с одного конца на трубчатом элементе 20, перпендикулярно к элементу 20. Другой конец трубчатого элемента 20 соединен, например, через отверстия болтовым соединением с пластиной съёмного пазового соединения 21 с рамой 1 носилок 7. Съёмное пазовое соединение 21 выполнено из двух параллельных пластин соединённых с одного конца, с размером паза равным ширине рамы 1. Трубчатый элемент 20, выполненный в нижней части с отверстиями, позволяющими ступенчато изменять расстояние между осью 19 колеса 18 и пазовым соединением 21. Ось 19 колеса 18 и пазовое соединение 21 перпендикулярны трубчатому элементу 20, параллельны между собой и расположены в разные стороны относительно трубчатого элемента 20. Узел крепления колеса 18 к раме 1 крепится быстросъёмным соединением, выполненным общеизвестным в технике способом. Для создания необходимого клиренса тележки 16, ось 19 колеса 18 может располагаться, ниже - выше или в плоскости носилок 7. При этом, при расположении оси 19 максимально выше плоскости носилок 7 клиренс будет минимальным, а при расположении оси 19 максимально ниже плоскости носилок 7 клиренс будет максимальным. Эта функция осуществляется ступенчатым изменением расстояния между осью 19 колеса18 и пазовым соединением 21, с последующим креплением пазового соединения 21 узла колеса 18 к раме 1, пазом 21 вверх или вниз. Для уменьшения усилия при транспортировке и повышения грузоподъёмности, транспортная тележка 16 снабжена электроприводом. Отличие тележки с электроприводом от тележки с ручной тягой заключается в замене обычных колёс на колёса с электроприводом. Электропривод состоит из двух мотор-колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Компоненты электропривода навешиваются на транспортную тележку быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
Приведение транспортной тележки 16 в рабочее положение. Из переносной сумки достаются элементы носилок 7, узлы крепления колёс и колёса 18. Сложенная в гармошку, внутренняя 4 рама 1 носилок 7 разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней 4 рамы, крепится застёжкой - «липучкой» 8 внешние линейные элементы 2 внешней рамы 1, с шагом перекрывающей линейными элементами 2 внешней 5 рамы места сгиба внутренней рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями 10 крепится ложе 9 носилок 7 и быстросъёмный фиксатор угла. По бокам носилок 7, в средней части, быстросъёмным соединением крепятся узлы опоры колёс, устанавливаются и фиксируются колеса 18. Устанавливается пара ручек 11, предназначенная и для транспортной тележки 16. Устанавливаются с помощью двух поворотно-фиксирующих механизмов 12 и 17, в нижней и верхней области ручки 11, удобные для перевозки тележки 16 углы. При наличии электропривода, устанавливаются мотор-колёса вместо обычных колёс 18. Навешиваются элементы электропривода на транспортную тележку и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
3.2. Четырёхколёсный вариант тележки 16 (фиг. 16) содержит носилки 7, состоящие из прямоугольной рамы 1, выполненной из жёстких, соединенных рояльными петлями 3 линейных элементов 2. Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5 . Внутренняя 4 и наружная 5 рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента 2 внутренней рамы 4, в рабочем положении соединены между собой. Линейные элементы 2, внутренней 4 и внешней 5 рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями 3, то есть линейный элемент 2 накладывается целой частью на место соединения линейных элементов другой рамы. То есть, происходит взаимное перекрытие мест соединений петлями 3 линейными элементами 2 рамы 4 и рамы 5. Между собой, внутренняя 4 и внешняя 5 рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя 4 и внешняя 5 рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней и внутреннюю сторону внешней рам закрепляется составляющие застёжки «липучка»8. Ложе 9 носилок 7 (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе 9 носилок 7 крепится к раме 1 фиксирующими ремнями 10. Фиксирующие ремни 10, одновременно стягивают дополнительно, внутреннюю 4 и внешнюю 5 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок 7, вдоль оси, установлены съёмные ручки 11. Съёмные ручки 11 крепятся к раме 1 , как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки 11, имеют функции ножек при установке носилок 7 на земле. Для этого ручки 11 выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок 7, для этого в месте поворота установлены поворотно-фиксирующие механизмы 12. Дополнительно, пара ручек с одной из сторон, для применения в качестве ручек тележки 11, выполнена с дополнительными поворотно-фиксирующими механизмами 17 в нижней области места захвата кистями рук. Съёмные ручки 11 заканчиваются в местах захвата кистями рук кистевыми ручками 13. Носилки 7 снабжены четырьмя съёмными мотор- колесами 18, расположенными по бокам носилок 7. Узел крепления мотор-колеса 18 к раме 1 выполнен следующим образом. Каждое колесо 18 закреплено на оси 19 быстросъёмным соединением. Ось 19 колеса 18 жёстко закреплена с одного конца на трубчатом элементе 20, перпендикулярно к элементу 20. Другой конец трубчатого элемента 20 соединен, например, через отверстия болтовым соединением с пластиной съёмного пазового соединения 21 с рамой 1 носилок 7. Съёмное пазовое соединение 21 выполнено из двух параллельных пластин соединённых с одного конца, с размером паза равным ширине рамы 1. Трубчатый элемент 20, выполненный в нижней части с отверстиями, позволяющими ступенчато изменять расстояние между осью 19 колеса 18 и пазовым соединением 21. Ось 19 колеса 18 и пазовое соединение 21 перпендикулярны трубчатому элементу 20, параллельны между собой и расположены в разные стороны относительно трубчатого элемента 20. Узел крепления колеса 18 к раме 1 крепится быстросъёмным соединением, выполненным общеизвестным в технике способом. Для создания необходимого клиренса тележки 16, ось 19 колеса 18 может располагаться, ниже - выше или в плоскости носилок 7. При этом, при расположении оси 19 максимально выше плоскости носилок 7 клиренс будет минимальным, а при расположении оси 19 максимально ниже плоскости носилок 7 клиренс будет максимальным. Эта функция осуществляется ступенчатым изменением расстояния между осью 19 колеса 18 и пазовым соединением 21, с последующим креплением пазового соединения 21 узла колеса 18 к раме 1, пазом вверх или вниз. Комплектация транспортной тележки электроприводом способствует уменьшению усилия при транспортировке и повышения грузоподъёмности. Электропривод состоит из четырёх мотор колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Компоненты электропривода навешиваются на транспортную тележку 16 быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Повороты транспортной тележки 16 осуществляется торможением колес 18 с одной из сторон и вращением колёс 18 с другой стороны. Разворот тележки 16 может осуществляться вращением колёс 18, находящихся по разным сторонам, в противоположном направлении. Кроме того, возможно управление транспортной тележки16 с помощью пульта управления, или при установке системы роботизированного управления с телекамерой и очков виртуальной реальности - дистанционно, что позволяет перевозить раненых, навешивать на тележку различное оборудование и управлять оборудованием и тележкой 16 дистанционно. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце или рюкзаке или в переносной сумке.
Приведение транспортной тележки 16 в рабочее положение. Из переносной сумки достаются элементы носилок 7, узлы крепления колёс и колёса 18. Сложенная в гармошку, внутренняя 4 рама носилок 7 разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента 2. По внешнему периметру внутренней рамы 4, крепится застёжкой-«липучкой»8 внешние линейные элементы 2 внешней 5 рамы, с шагом перекрывающей линейными элементами 2 внешней 5 рамы места сгиба внутренней 4 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями 10 крепится ложе 9 носилок 7, устанавливаются в сквозные отверстия рамы 1 ручки носилок 11 и быстросъёмный фиксатор угла. По бокам носилок, быстросъёмным соединением крепятся узлы опоры колёс 18, устанавливаются и фиксируются колеса 18. Устанавливается пара ручек 11, предназначенная и для транспортной тележки 16. Устанавливаются с помощью двух поворотно-фиксирующих механизмов 12 и 17 в нижней и верхней области ручки 11, удобные для перевозки тележки 16 углы. Устанавливаются мотор-колёса 18. Навешиваются элементы электропривода на транспортную тележку и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
4. Компактные транспортные тележки, предназначенные как для перевозки людей на медицинских носилках, так и грузов, с ручным или электрическим приводом, имеющие опору на гусеницы. Компактные транспортные тележки, представляют собой описанные выше медицинские носилки, дополненные съёмными гусеничными опорами.
4.1. Трёх гусеничный вариант тележки 16 (фиг. 17, фиг. 19 и фиг. 20) содержит носилки 7, состоящие из прямоугольной рамы 1, выполненной из жёстких, соединенных рояльными петлями 3 линейных элементов 2. Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5. Внутренняя 4 и наружная 5 рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента 2 внутренней 4 рамы, в рабочем положении соединены между собой. Линейные элементы 2, внутренней 4 и внешней 5 рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями 3, то есть линейный элемент 2 накладывается целой частью на место соединения линейных элементов другой рамы. То есть, происходит взаимное перекрытие мест соединений петлями 3 линейными элементами 2 рамы 4 и рамы 5. Между собой, внутренняя 4 и внешняя 5 рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы 1 в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя 4 и внешняя 5 рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней 4 и внутреннюю сторону внешней 5 рам закрепляется составляющие застёжки «липучка» 8. Ложе 9 носилок 7 (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе 9 носилок 7 крепится к раме 1 фиксирующими ремнями 10. Фиксирующие ремни 10, одновременно стягивают дополнительно, внутреннюю и внешнюю рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок, вдоль оси, установлены съёмные ручки 11. Съёмные ручки 11 крепятся к раме 1, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки 11, имеют функции ножек при установке носилок на земле. Для этого ручки 11 выполнены с возможностью поворота части элемента ручки 11 под углом к плоскости носилок 7, для этого в месте поворота установлены поворотно-фиксирующие механизмы 12. Дополнительно, пара ручек 11 с одной из сторон, для применения в качестве ручек 11 тележки 16, выполнена с дополнительными поворотно-фиксирующими механизмами 17 в нижней области места захвата кистями рук. Съёмные ручки 11 заканчиваются в местах захвата кистями рук кистевыми ручками 13. Носилки 7 снабжены тремя съёмными гусеничными опорами 22. Две гусеничные опоры 22 закреплены на раме 1 в задней части носилок 7 быстросъёмным соединением, причём крепление регулируемое и позволяет установить гусеничные опоры 22 на различном расстоянии от центральной оси носилок 7. Одна гусеничная опора 22 крепится быстросъёмным соединением на раме 1 в передней части по центральной оси тележки 16. Передняя гусеничная опора 22 выполнена на оси 23 в опорном подшипнике 24 поворотной в горизонтальной плоскости. Для поворота гусеничной опоры 22 применяются пара ручек 11 носилок 7 в качестве ручек 11 тележки 16, которая выполнена с двумя поворотно-фиксирующими механизмами 12 и17 выполненных с двух сторон ручки 11, в нижней области вместе крепления и в месте захвата кистями рук и соединена быстросъёмным соединением с гусеничной опорой 22. Гусеничные опоры 22 выполнены; размером позволяющим переносить их в ранце человеком, с электроприводом или без электропривода. Применение в транспортной тележке 16 гусеничных опор 22 без электропривода оправдано тем, что в сравнении с способом переноски травмированного человека на носилках-волокушах, сопротивление перемещения с помощью гусеничных опор 22 меньше, а клиренс сопоставим с носилками-волокушами. Установка электропривода возможна; на одной передней гусеничной опоре 22, на двух задних гусеничных опорах 22 или на трёх гусеничных опорах 22. Гусеничная опора 22 без электропривода состоит из П- образной рамы 25 на которой в нижней части закреплены на осях 26 опорные катки 27 на которые натянута гусеничная лента 28. В верхней части П-образной рамы 25, в средней части выполнена ось вращения 29 проходящая вдоль пазового соединения крепления 21 к раме 1 и сквозных отверстий, выполненных в верхней части П-образной рамы 25. С помощью пазового соединения 21 гусеничные опоры 22 крепятся к раме 1 носилок 7 быстросъёмным соединением, например через отверстия в раме и пазовом соединении 21. Причём рама 1 носилок 7 входит в паз пазового соединения 21. Ось вращения 29 установленная между вилкой 30, закреплённой на пазовом соединении 21 и верхней части П-образной рамы 25 гусеничных опор 22, позволяет при движении тележки осуществлять опору всей нижней поверхностью гусеницы 28. На передней гусеничной опоре 22 выполнен быстросъёмный узел крепления ручек 11 транспортировки. Электропривод гусеничной опоры 22, как вариант, с установкой в опорном катке 27 (опорных катках) электродвигателей выполненных как мотор -колесо. Электропривод состоит мотор колёс 27, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Компоненты электропривода навешиваются на транспортную тележку 16 быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Для работы транспортной тележки в зимних условиях возможно использование в качестве опор лыжи. В варианте без электропривода используется три лыжи. В варианте с электроприводом возможно следующее сочетание; передняя лыжа - две задних гусеничные опоры, передняя гусеничная опора - две задние лыжи. Узел крепление лыж к раме аналогичен креплению гусеничных опор. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
Приведение транспортной тележки в рабочее положение. Из переносной сумки достаются элементы носилок 7 и гусеничные опоры 22. Сложенная в гармошку, внутренняя рама 4 носилок 7 разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней 4 рамы, крепится застёжкой-«липучкой» 8 внешние линейные элементы 2 внешней 5 рамы, с шагом перекрывающей линейными элементами 2 внешней рамы места сгиба внутренней 4 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями 10 крепится ложе 9 носилок 7, устанавливаются в сквозные отверстия рамы ручки носилок 11 и быстросъёмный фиксатор угла. В передней части рамы 1 носилок 7, по центру, с помощью пазового соединения 21, быстросъёмным соединением крепится гусеничная опора 22. К гусеничной опоре 22 крепятся ручки 11 транспортировки. С задней части рамы 1 носилок 7 крепятся быстросъёмным соединением две гусеничные опоры 22 с необходимым расстоянием, определяемым режимом передвижения, между собой. При наличии электропривода, навешиваются элементы электропривода на транспортную тележку 16 и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка готова к использованию. Разборка транспортной тележки производится в обратном порядке.
4.2. Четырёхгусеничный вариант тележки 16 (фиг. 18 и фиг. 19) содержит носилки 7, состоящие из прямоугольной рамы 1, выполненной из жёстких, соединенных рояльными петлями 3 линейных элементов 2. Рама 1 составлена из двух отдельных прямоугольников, из внутреннего 4 и наружного 5. Внутренняя 4 и наружная 5 рамы плотно соприкасаются друг с другом по всему периметру. Начало первого и конец последнего, линейного элемента 2 внутренней 4 рамы, в рабочем положении соединены между собой. Линейные элементы 2, внутренней 4 и внешней 5 рамы по всему периметру, перекрывают друг друга по сторонам прямоугольника, в местах соединений элементов петлями 3, то есть линейный элемент 2 накладывается целой частью на место соединения линейных элементов другой рамы. То есть, происходит взаимное перекрытие мест соединений петлями 3 линейными элементами 2 рамы 4 и рамы 5. Между собой, внутренняя 4 и внешняя 5 рамы, по всему периметру закрепляются быстросъёмными соединениями с фиксацией положения. При необходимости, для жесткости рамы в плоскости, устанавливается элемент быстросъёмной фиксации угла. Между собой, внутренняя 4 и внешняя 5 рамы, как вариант, соединяются следующим образом: на внешнюю сторону внутренней 4 и внутреннюю сторону внешней 5 рам закрепляется составляющие застёжки «липучка» 8. Ложе 9 носилок 7 (платформа тележки) выполнено из прочного гибкого материала, например ткани или сетки. Ложе 9 носилок 7 крепится к раме 1 фиксирующими ремнями 10. Фиксирующие ремни 10 одновременно стягивают дополнительно внутреннюю 4 и внешнюю 5 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Для переноски носилок 7, вдоль оси, установлены съёмные ручки 11. Съёмные ручки 11 крепятся к раме 1, как вариант, через сквозные отверстия быстросъёмным соединением. Съёмные ручки 11, имеют функции ножек при установке носилок на земле. Для этого ручки 11 выполнены с возможностью поворота части элемента ручки под углом к плоскости носилок, для этого в месте поворота установлены поворотно-фиксирующие механизмы 12. Дополнительно, пара ручек 1 с одной из сторон, для применения в качестве ручек тележки 16, выполнена с дополнительными поворотно-фиксирующими механизмами 17 в нижней области места захвата кистями рук. Съёмные ручки 11 заканчиваются в местах захвата кистями рук кистевыми ручками 13. Носилки 7 снабжены четырьмя съёмными гусеничными опорами 22. Гусеничные опоры 22, парами, закреплены на раме 1 в задней и передней части носилок 7 быстросъёмным соединением, причём крепление регулируемое и позволяет установить гусеничные опоры 22 на различном расстоянии от центральной оси носилок 7. Для сопровождения транспортной тележки 16. применяются пара ручек 11 носилок 7 в качестве ручек тележки 16. Ручки тележки 16 выполнена с двумя поворотно-фиксирующими механизмами 12 и 17, в нижней области вместе крепления и в месте захвата кистями рук и соединена быстросъёмным соединением с рамой 1. Гусеничные опоры 22 выполнены; размером позволяющим переносить их в ранце человеком и с электроприводом на все четыре гусеничные опоры 22. Гусеничная опора 22 состоит из П-образной рамы 25 на которой в нижней части закреплены на осях 26 опорные катки 27, на которые натянута гусеничная лента 28. В верхней части П-образной рамы 25, в средней части выполнена ось вращения 29 проходящая вдоль пазового соединения крепления 21 к раме 1 и сквозных отверстий, выполненных в верхней части П-образной рамы 25. С помощью пазового соединения 21 гусеничные опоры 22 крепятся к раме 1 носилок 7 быстросъёмным соединением, например через отверстия в раме и пазовом соединении 21. Причём рама 1 носилок 7 входит в паз пазового соединения 21. Ось вращения 29 установленная между вилкой 30, закреплённой на пазовом соединении 21 и верхней части П-образной рамы 25 гусеничных опор 22, позволяет при движении тележки осуществлять опору всей нижней поверхностью гусеницы 28. На передней гусеничной опоре 22 выполнен быстросъёмный узел крепления ручек 11 транспортировки. Электропривод гусеничной опоры 22, как вариант, с установкой в опорном катке 27 (опорных катках) электродвигателей выполненных как мотор -колесо. Электропривод состоит из мотор-колёс, аккумулятора, управляющего контроллера панели управления и (или) переносного пульта управления и дополнительного оборудования. Для получения мобильности, при переноске элементов электропривода, все компоненты электропривода собираются в схему с помощью электрических разъёмов. Повороты транспортной тележки осуществляется торможением гусениц 28 с одной из сторон и движением гусениц 28 с другой стороны. Разворот тележки 16 может осуществляться движением гусениц 28, находящихся по разным сторонам, в противоположном направлении. Кроме того, возможно управление транспортной тележки с помощью пульта управления, или при установке системы роботизированного управления с телекамерой и очков виртуальной реальности - дистанционно, что позволяет транспортировать раненых и перевозить грузы без сопровождающего, а так же навешивать различное оборудование. Компоненты электропривода навешиваются на транспортную тележку быстросъёмными соединениями и (или) размещаются элементы, например в навесных сумках. Для переноски, все элементы транспортной тележке в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
Приведение транспортной тележки 16 в рабочее положение. Из переносной сумки достаются элементы носилок 7 и гусеничные опоры 22. Сложенная в гармошку, внутренняя рама 4 носилок 7 разворачивается в размер прямоугольника и соединяется начало и конец первого и последнего прямолинейного элемента. По внешнему периметру внутренней 4 рамы, крепится застёжкой-«липучкой» 8 внешние линейные элементы внешней 5 рамы, с шагом перекрывающей линейными элементами 2 внешней 5 рамы места сгиба внутренней 4 рамы. Соединение двух рам, возможно с помощью быстросъёмных соединений, пропущенных через сквозные отверстия, выполненные через две рамы, или иными быстросъёмными соединениями применяемых в технике. Затем фиксирующими ремнями 10 крепится ложе 9 носилок, устанавливаются в сквозные отверстия рамы ручки носилок и быстросъёмный фиксатор угла. В передней части рамы 1 носилок 7, по центру, с помощью пазового соединения 21, быстросъёмным соединением крепится гусеничная опора 22. К гусеничной опоре 22 крепятся ручки транспортировки 11. С задней части рамы 1 носилок 7 крепятся быстросъёмным соединением две гусеничные опоры 22 с необходимым расстоянием, определяемым режимом передвижения, между собой. При наличии электропривода, навешиваются элементы электропривода на транспортную тележку 16 и собирается монтажная схема, с помощью электрических разъёмов. Транспортная тележка 16 готова к использованию. Разборка транспортной тележки16 производится в обратном порядке.
Технический эффект предлагаемого способа создания раскладной силовой рамы устройств и варианты устройств на основе данного способа заключается в возможности собирать силовую раму из плоских линейных элементов, соединённых между собой, и хранении упакованных в несколько плоских компактных пакетов. А при создании силовой при переноске рамы устройства - разворачиваются в соединённые между собой, линейные элементы образующие замкнутый контур, необходимой конфигурации, создавая основу конструкции устройства. Это позволяет:
1. Реализовать способ создания жёсткой рамы для устройств из линейных плоских элементов, компактно собранных при переноске и хранении в пакет и переносимым в частности человеком. 2. На основе реализованного способа выполнить компактные устройства следующего наименования и назначения:
*Медицинские носилки, каркасного типа, для переноски больных, эвакуации раненых при катастрофах и эвакуации раненых при ведении боевых действий.
*Компактные раскладные кровати и лежаки предназначенных для военнослужащих и туристов.
*Компактные транспортные тележки, предназначенные как для перевозки грузов, так и медицинских носилок, с ручным или электрическим приводом, имеющие опору на колеса или гусеницы. Причём, тележки в собранном состоянии, в частности переносится человеком в ранце, сумке или в рюкзаке. Всё выше перечисленное, обеспечивает заявленный технический эффект предложенного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МЯГКИМ КРЫЛОМ И ДВИЖИТЕЛЕМ (ВАРИАНТЫ) | 2019 |
|
RU2830446C2 |
| МНОГОУРОВНЕВАЯ РЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА ЭСТАКАДНОГО ТИПА С РАЗЛИЧНЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ ПО ПУТЕПРОВОДАМ НА РАЗНЫХ УРОВНЯХ | 2020 |
|
RU2790453C2 |
| МОБИЛЬНЫЕ ТРАНСФОРМИРУЕМЫЕ САНИТАРНЫЕ НОСИЛКИ | 2022 |
|
RU2792360C1 |
| ТЕЛЕЖКА-ПОДЪЕМНИК ДЛЯ БОЛЬНЫХ | 2012 |
|
RU2520041C2 |
| УНИВЕРСАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2020 |
|
RU2793481C2 |
| СТАЦИОНАРНАЯ ВИБРОИЗОЛИРУЮЩАЯ ПЛАТФОРМА ДЛЯ САНИТАРНЫХ НОСИЛОК | 2023 |
|
RU2815052C1 |
| Санитарные колесные носилки | 1981 |
|
SU1017328A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОЗКИ РУЧНОЙ КЛАДИ И ПРИСПОСОБЛЕНИЙ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ПОСТРАДАВШЕГО ЧЕЛОВЕКА С ИСПОЛЬЗОВАНИЕМ ЭТОГО УСТРОЙСТВА | 2008 |
|
RU2399535C2 |
| СПОСОБ ПОДЪЁМА И МАНЕВРИРОВАНИЯ В ПОЛЁТЕ МЯГКИМ КРЫЛОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2828629C1 |
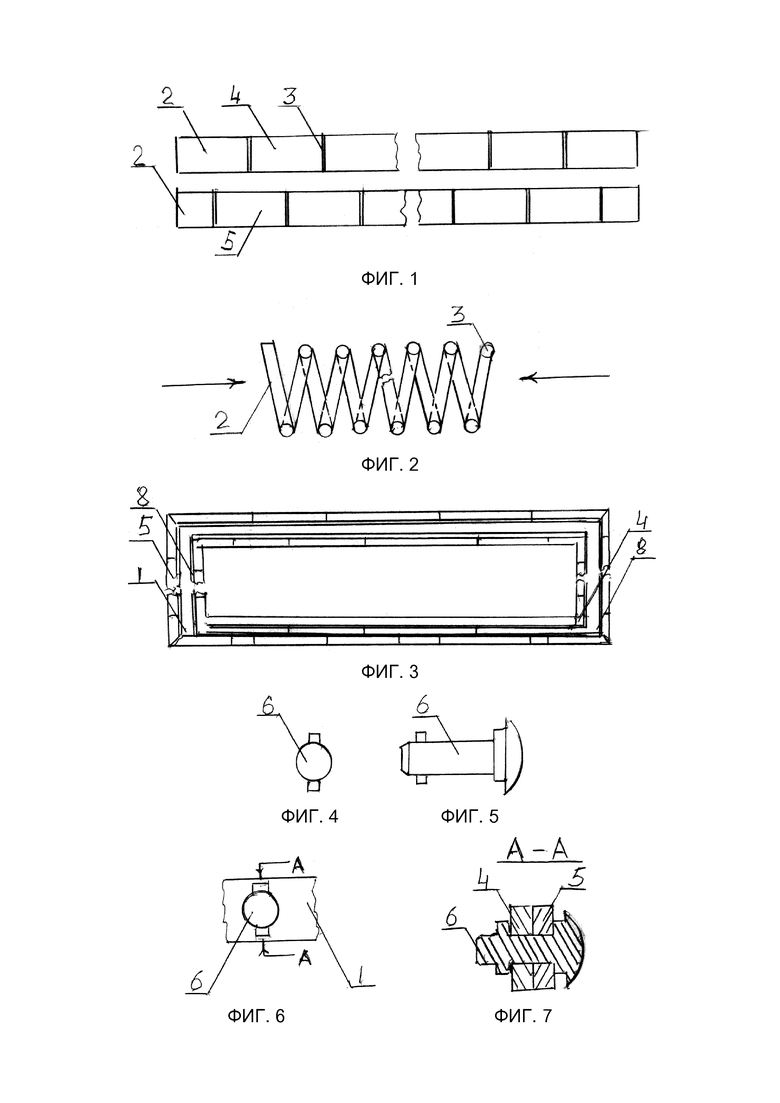
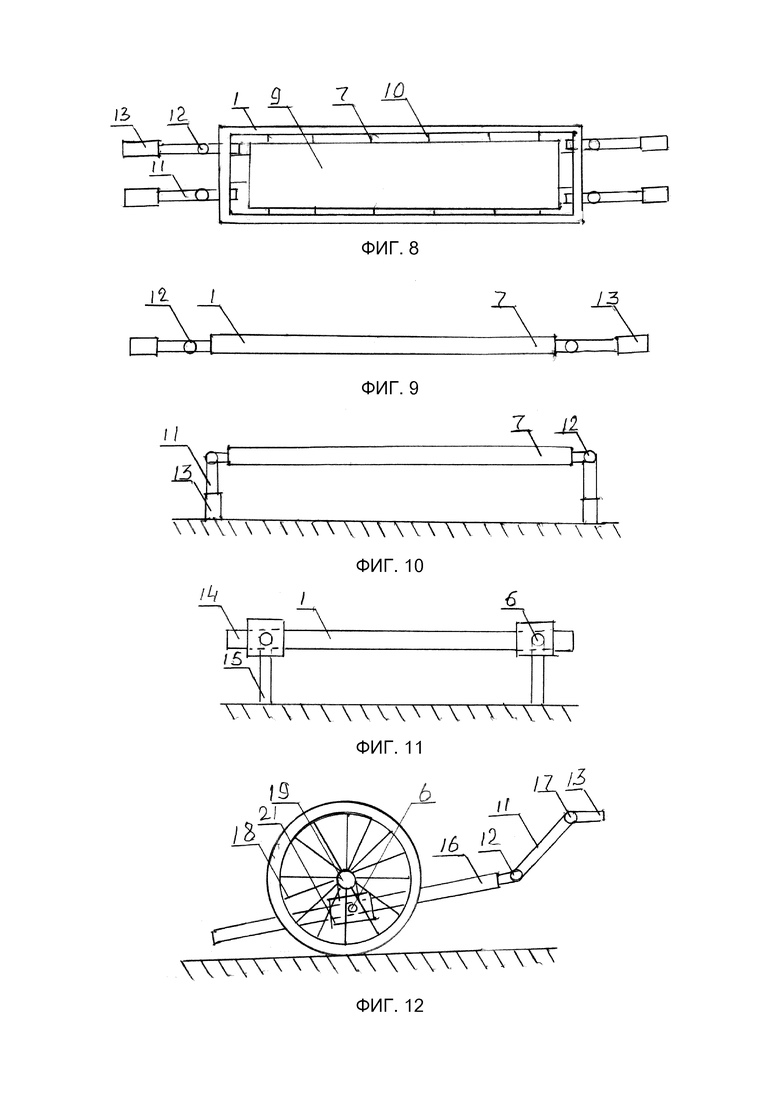
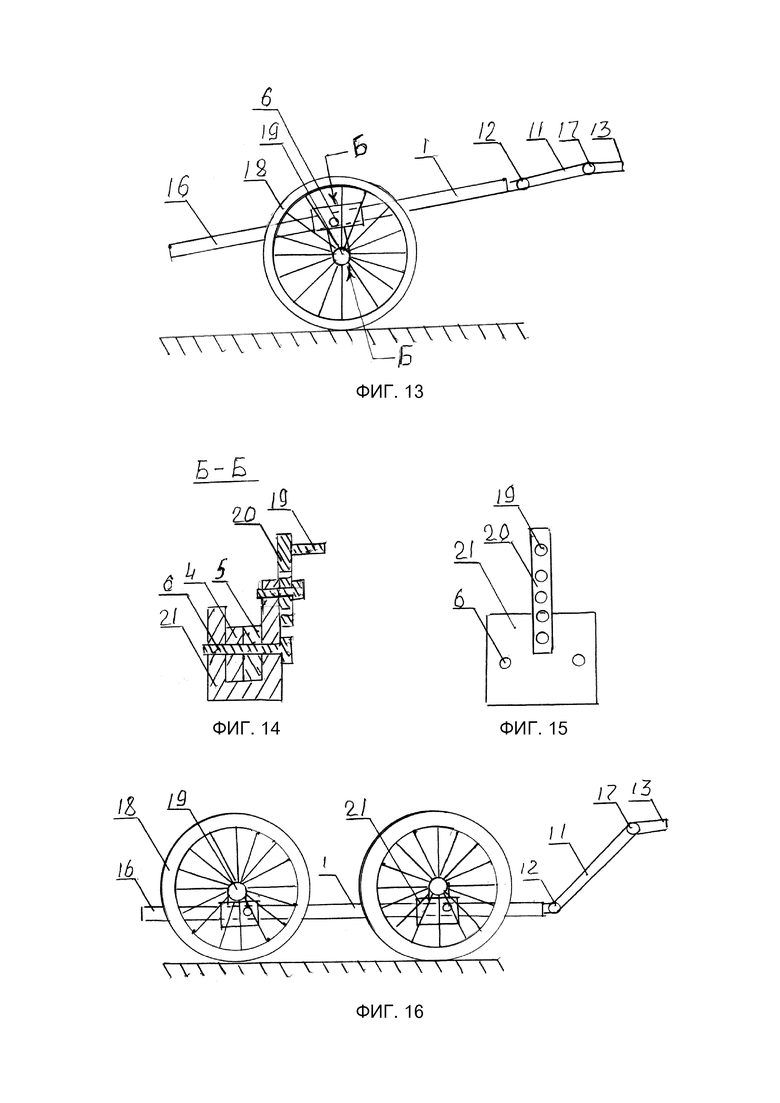
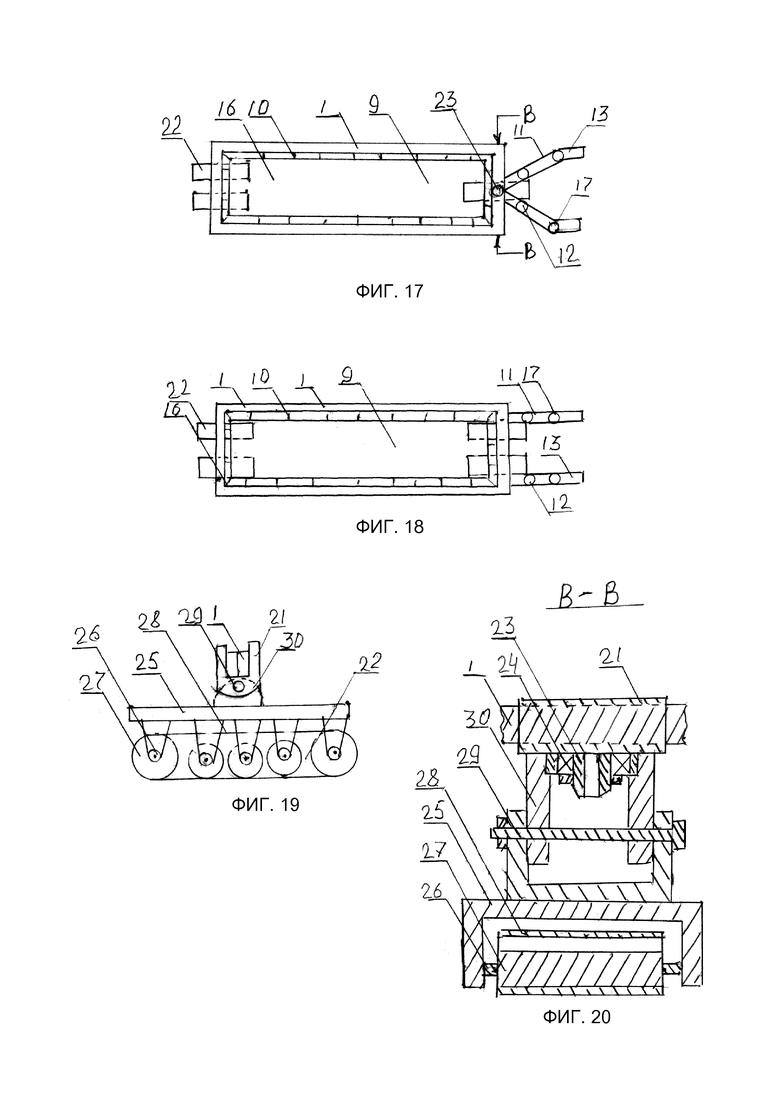
Изобретение относится к раскладным рамам для спасательных служб. Раскладная силовая рама устройства содержит соединенные последовательно концами между собой поворотными петлями плоские линейные элементы. Элементы выполнены с возможностью упаковки в плоские пакеты, наложением одного элемента на другой типа гармошки. Рама состоит из двух отдельных контуров, внутреннего и наружного, выполненных плотно соприкасающимися друг с другом по всему периметру. Каждый линейный элемент прямого участка внешнего периметра в рабочем положении перекрывает место сгиба элементов внутреннего периметра. Каждый линейный элемент прямого участка внутреннего периметра перекрывает место сгиба внешнего периметра. Внутренний и внешний контуры рамы по всему периметру соединены быстросъемными элементами с фиксацией положения. Достигается возможность переносить разобранную раму человеком в рюкзаке, возможность компактного хранения в нескольких плоских пакетах. 5 н. и 9 з.п. ф-лы, 20 ил.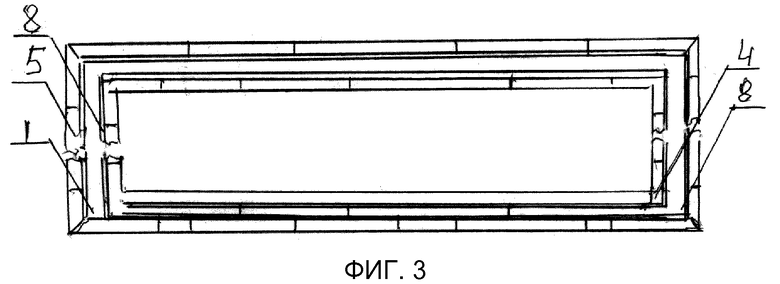
1. Способ приведения в рабочее положение раскладной силовой рамы устройства, выполненной из элементов, соединенных между собой поворотными петлями, при хранении упакованных в пакет, отличающийся тем, что рама собирается из плоских линейных элементов, соединенных между собой последовательно концами, при хранении упакованных в плоские пакеты, наложением одного элемента на другой типа гармошки, при приведении в рабочее положение соединенные между собой линейные элементы разворачиваются, образуя замкнутый контур необходимой конфигурации, рама составляется из двух отдельных контуров, из внутреннего и наружного, контуры рамы плотно соприкасаются друг с другом по всему периметру, каждый линейный элемент прямого участка внешнего контура рамы в рабочем положении перекрывает место сгиба элементов внутреннего контура рамы, а каждый линейный элемент прямого участка внутреннего контура рамы перекрывает место сгиба внешнего контура рамы, между собой внутренний и внешний контур рамы по всему периметру закрепляются быстросъемными соединениями с фиксацией положения.
2. Способ приведения в рабочее положение раскладной силовой рамы по п. 1, отличающийся тем, что рама имеет возможность в рабочем положение разворачиваться в замкнутый или разомкнутый контур конфигурации.
3. Способ приведения в рабочее положение раскладной силовой рамы по п. 1, отличающийся тем, что рама в плоскости фиксируется быстросъемным элементом фиксации угла.
4. Раскладная силовая рама устройства, содержащая соединенные между собой поворотными петлями линейные элементы, выполненная с возможностью разворачивания линейных элементов с образованием рамы устройства и снабженная фиксаторами положения линейных элементов, отличающаяся тем, что рама содержит плоские линейные элементы, соединенные последовательно концами между собой поворотными петлями, выполненными с возможностью упаковки в плоские пакеты, наложением одного элемента на другой типа гармошки, рама состоит из двух отдельных контуров, из внутреннего и наружного, выполненных плотно соприкасающимися друг с другом по всему периметру, причем каждый линейный элемент прямого участка внешнего периметра в рабочем положении перекрывает место сгиба элементов внутреннего периметра, а каждый линейный элемент прямого участка внутреннего периметра перекрывает место сгиба внешнего периметра, внутренний и внешний контуры рамы по всему периметру соединены быстросъемными элементами с фиксацией положения.
5. Раскладная силовая рама устройства типа носилок, содержащая соединенные между собой поворотными петлями линейные элементы, выполненная с возможностью разворачивания линейных элементов с образованием рамы устройства, снабженная фиксаторами положения линейных элементов, закрепленные ручки транспортировки с механизмом поворота и фиксации и ложе, отличающаяся тем, что рама содержит плоские линейные элементы, соединенные последовательно концами между собой поворотными петлями, выполненные с возможностью упаковки в плоские пакеты, наложением одного элемента на другой типа гармошки, рама состоит из двух отдельных контуров, из внутреннего и наружного, выполненных плотно соприкасающимися друг с другом по всему периметру, причем каждый линейный элемент прямого участка внешнего периметра в рабочем положении перекрывает место сгиба элементов внутреннего периметра, а каждый линейный элемент прямого участка внутреннего периметра перекрывает место сгиба внешнего периметра, внутренний и внешний контуры по всему периметру рамы соединены быстросъемными элементами с фиксацией положения, ручки транспортировки выполнены с возможностью быстрой установки и съема с фиксаторами, а ложе выполнено съемным.
6. Раскладная силовая рама устройства типа носилок по п. 5, отличающаяся тем, что используется в качестве лежака и снабжена быстросъемными опорными ножками.
7. Раскладная силовая рама устройства типа носилок, содержащая соединенные между собой поворотными петлями линейные элементы, выполненная с возможностью разворачивания линейных элементов с образованием рамы устройства, снабженная фиксаторами положения линейных элементов, закрепленные ручки транспортировки с механизмом поворота и фиксации и ложе, отличающаяся тем, что рама содержит плоские линейные элементы, соединенные последовательно концами между собой поворотными петлями, выполненные с возможностью упаковки в плоские пакеты, наложением одного элемента на другой типа гармошки, рама состоит из двух отдельных контуров, из внутреннего и наружного, выполненных плотно соприкасающимися друг с другом по всему периметру, причем каждый линейный элемент прямого участка внешнего периметра в рабочем положении перекрывает место сгиба элементов внутреннего периметра, а каждый линейный элемент прямого участка внутреннего периметра перекрывает место сгиба внешнего периметра, внутренний и внешний контуры по всему периметру рамы соединены быстросъемными элементами с фиксацией положения, ручки транспортировки выполнены с возможностью быстрой установки и съема с фиксаторами, ложе выполнено съемным, по бокам рамы быстросъемным соединением крепятся узлы колесных опор со съемными колесами.
8. Раскладная силовая рама устройства типа носилок по п. 7, отличающаяся тем, что узел колесных опор состоит из оси колеса, жестко закрепленной с одного конца на трубчатом элементе перпендикулярно, другой конец трубчатого элемента соединен с пластиной съемного пазового соединения с рамой носилок, съемное пазовое соединение выполнено из двух параллельных пластин, соединенных с одного конца, с размером паза, равным ширине составляющих элементов рамы, трубчатый элемент выполнен в нижней части, под болтовое соединение, с отверстиями ступенчатой регулировки расстояния между осью колеса и пазовым соединением, соединение узла колесных опор выполнено с пазом, охватывающим раму сверху или снизу, снабженным фиксатором положения.
9. Раскладная силовая рама устройства типа носилок по любому из пп. 7, 8, отличающаяся тем, что снабжена электроприводом колес, состоит по крайней мере из двух мотор-колес, компоненты электропривода собираются в схему с помощью электрических разъемов, навешиваются компоненты электропривода быстросъемными соединениями, размещаются в навесных сумках и комплектуются системой дистанционного управления.
10. Раскладная силовая рама устройства типа носилок, содержащая соединенные между собой поворотными петлями линейные элементы, выполненная с возможностью разворачивания линейных элементов с образованием рамы устройства, снабженная фиксаторами положения линейных элементов, закрепленные ручки транспортировки с механизмом поворота и фиксации и ложе, отличающаяся тем, что рама содержит плоские линейные элементы, соединенные последовательно концами между собой поворотными петлями, выполненные с возможностью упаковки в плоские пакеты, наложением одного элемента на другой типа гармошки, рама состоит из двух отдельных контуров, из внутреннего и наружного, выполненных плотно соприкасающимися друг с другом по всему периметру, причем каждый линейный элемент прямого участка внешнего периметра в рабочем положении перекрывает место сгиба элементов внутреннего периметра, а каждый линейный элемент прямого участка внутреннего периметра перекрывает место сгиба внешнего периметра, внутренний и внешний контуры по всему периметру рамы соединены быстросъемными элементами с фиксацией положения, ручки транспортировки выполнены с возможностью быстрой установки и съема с фиксаторами, ложе выполнено съемным, по бокам рамы быстросъемным соединением крепятся узлы гусеничных опор с гусеницами.
11. Раскладная силовая рама устройства типа носилок по п. 10, отличающаяся тем, что гусеничная опора состоит из П-образной рамы, на которой в нижней части закреплены на осях опорные катки, на которые натянута гусеничная лента в верхней части П-образной рамы, в средней части выполнена ось вращения, рама носилок входит в паз пазового соединения, ось вращения проходит вдоль пазового соединения крепления к раме и выполнена в верхней части к П-образной раме перпендикулярно, крепится к раме носилок быстросъемным соединением через отверстия в раме.
12. Раскладная силовая рама устройства типа носилок по любому из пп. 10, 11, отличающаяся тем, что одна гусеничная опора крепится быстросъемным соединением на раме в передней части по центральной оси тележки, передняя гусеничная опора выполнена поворотной на оси в горизонтальной плоскости, пара ручек выполнена с двумя поворотно-фиксирующими механизмами, в нижней области в месте крепления и в месте захвата кистями рук соединена быстросъемным соединением с гусеничной опорой.
13. Раскладная силовая рама устройства типа носилок по любому из пп. 10-12, отличающаяся тем, что снабжена электроприводом гусениц, компоненты электропривода собираются в схему с помощью электрических разъемов, навешиваются компоненты электропривода быстросъемными соединениями, размещаются в навесных сумках и комплектуются системой дистанционного управления.
14. Раскладная силовая рама устройства типа носилок по любому из пп. 4-13, отличающаяся тем, что все элементы устройства в компактном сложенном виде размещаются в ранце, или рюкзаке, или в переносной сумке.
| 0 |
|
SU187114A1 | |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ФЕРРО-РЕЗОНАНСА В | 0 |
|
SU221124A1 |
| СПОСОБ СВАРКИ И ПАЙКИ В ЗАЩИТНОМ ГАЗЕ | 0 |
|
SU176648A1 |
| ШВЕЙНАЯ МАШИНА ДЛЯ ОБРАЗОВАНИЯ ДВУХНИТОЧНОЙ | 0 |
|
SU183056A1 |
| US 2007216118 A1, 20.09.2007 | |||
| US 2012066836 A1, 22.03.2012 | |||
| CN 206867360 U, 12.01.2018. | |||

