Предлагаемое изобретение относится к области приборостроения и предназначено для установки и горизонтирования приборов.
Известен патент №2184935 от 27.02.2001 «Центрирующий штатив», содержащий столик с центрировочной втулкой, жесткий отвес с уровнем, три опорные раздвижные ножки и тормозной узел. Каждая ножка состоит из выдвижной части и не выдвижной, шарнирно соединенной со столиком. Тормозной узел выполнен электромагнитным порошковым и установлен на выдвижной части каждой ножки. На не выдвижной части ножек, с возможностью взаимодействия с шестерней на валу тормозного порошкового электромагнитного узла, укреплена зубчатая рейка.
Процесс горизонтирования происходит следующим образом: глядя на пузырьки крестообразного уровня невысокой точности на жестком раздвижном отвесе и придавливая вниз штатив, наклоняют столик в нужную сторону. При этом зубчатое колесо на оси тормозного порошкового электромагнитного узла прокатывается по зубчатой рейке, одна ножка удлиняется, а другие укорачиваются, но благодаря действию возвратной пружины тормозного порошкового электромагнитного узла, ножки остаются постоянно прижатыми к бетонной плите основания. Когда зафиксировано положение пузырьков в центре уровня, подают напряжение на тормозной порошковый электромагнитный узел ножек. Происходит одновременное стопорение подвижных частей на всех трех опорных ножках.
Недостатком данной конструкции является:
- ограничение массы устанавливаемых приборов, определяемой механическими характеристиками возвратной пружины внутри корпуса тормозного порошкового электромагнитного узла;
- в случае отсутствия электропитания зафиксировать результат горизонтирования штатива не представляется возможным;
- способ горизонтирования штатива конструктивно не предполагает точного горизонтирования;
- в предлагаемой конструкции рекомендуется проконтролировать точность горизонтирования и центрирования оптическим отвесом, имеющимся на трегере геодезического инструмента, например теодолита.
Наиболее близкой по технической сущности к предлагаемой конструкции является конструкция штатива по авторскому свидетельству №224819 от 17.02.1967. Изобретение относится к области геодезического приборостроения. В предложенном штативе становой винт скреплен с полой телескопической штангой с уровнем на кронштейне, а его ножки, с возможностью грубого изменения длины, снабжены устройством для микрометренного изменения их длины. Устройство состоит из металлической вставки с винтом, одноступенчатой зубчатой конической передачи для вращения этого винта и зажимного винта.
Недостатками данной конструкции является:
- отсутствие позиционирования выдвигаемой части ноги по отношению к металлической вставке. Для обеспечения изменения длины ноги как в одну, так и в другую сторону, необходимо обозначить достаточное для этого расстояние между металлической вставкой и выдвигаемой частью ноги;
- необходимость использования механизма вращения винта для микрометренного изменения длины ножки в виде одноступенчатой конической зубчатой передачи;
- на площадке центрирующей телескопической штанги установлен круговой уровень, который при произвольном угловом позиционировании в плоскости, параллельной плоскости головки штатива не будет кардинально способствовать процессу ускорения приведения геологического инструмента в горизонтальное положение;
- в предлагаемой конструкции также рекомендуется дополнительно проконтролировать точность горизонтирования и центрирования оптическим отвесом, имеющимся на трегере устанавливаемого геодезического инструмента, например теодолита.
Достигаемый технический результат предлагаемого изобретения - создание удобного и надежного устройства горизонтирования для приборов массой до 150 кг, обеспечивающего точность горизонтирования, а также имеющего поперечную и продольную жесткость для противодействия изгибающим и крутящим моментам относительно центральной оси устройства при воздействии нормативных ветровых нагрузок, влияющих на точность показания приборов, и для противодействия опрокидывающим моментам, возникающим в процессе эксплуатации.
Технический результат изобретения достигается конструкционными и эксплуатационными свойствами устройства горизонтирования, которое состоит из треноги и азимутального привода, состоящего из неподвижной и подвижной части с элементами крепления приборов, который может быть заменен специальной площадкой.
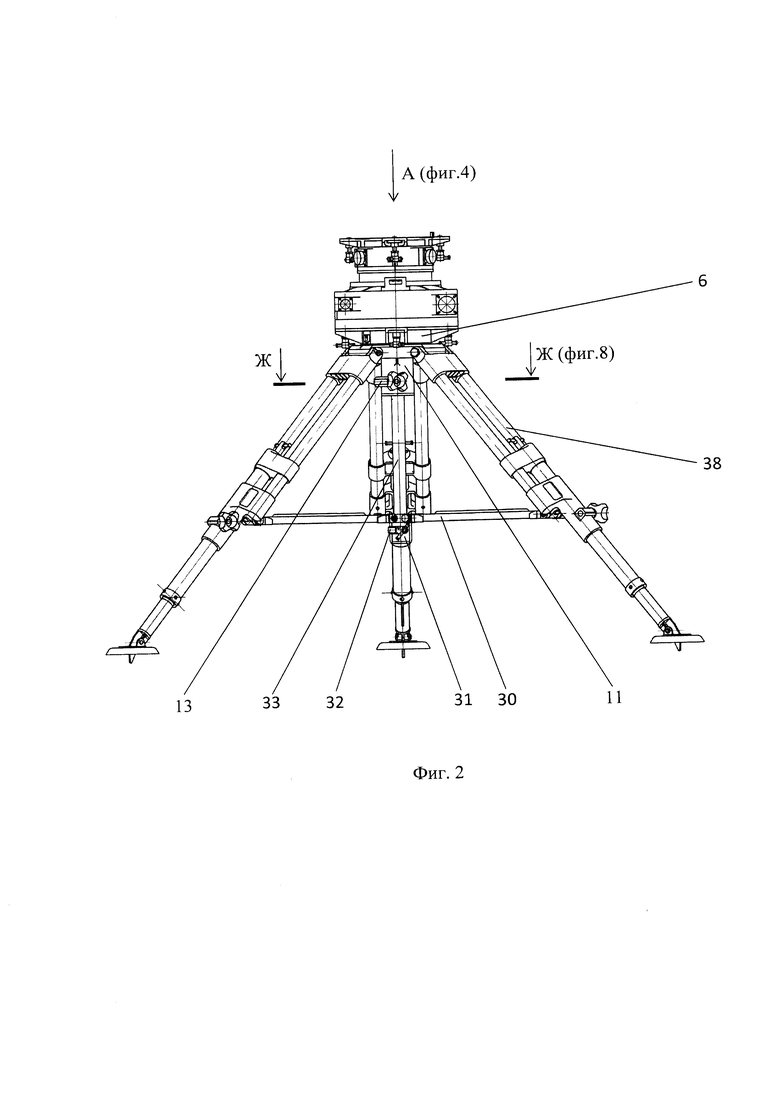
Тренога имеет основание с поворотной платформой и три трехсекционные двухуровневые телескопические ножки с элементами прецизионного горизонтирования в виде винтовой пары, раскрывающиеся и складывающиеся одновременно посредством среднеуровневых растяжек, шарнирно соединенных с кронштейнами трехсекционных двухуровневых телескопических ножек и крестовиной центрального шарнира с тангенциальным фиксатором, перемещающейся возвратно-поступательно по центральной колонне треноги и надежно фиксирующей положение трехсекционных двухуровневых телескопических ножек при любом угле их раскрытия.
На верхней поверхности неподвижной части корпуса азимутального привода, конструктивно позиционированного, установленного и зафиксированного невыпадающими винтами на поворотной платформе основания треноги, размещены два взаимно перпендикулярных и диаметрально расположенных уровня с цилиндрическими ампулами для контроля горизонтирования устройства.
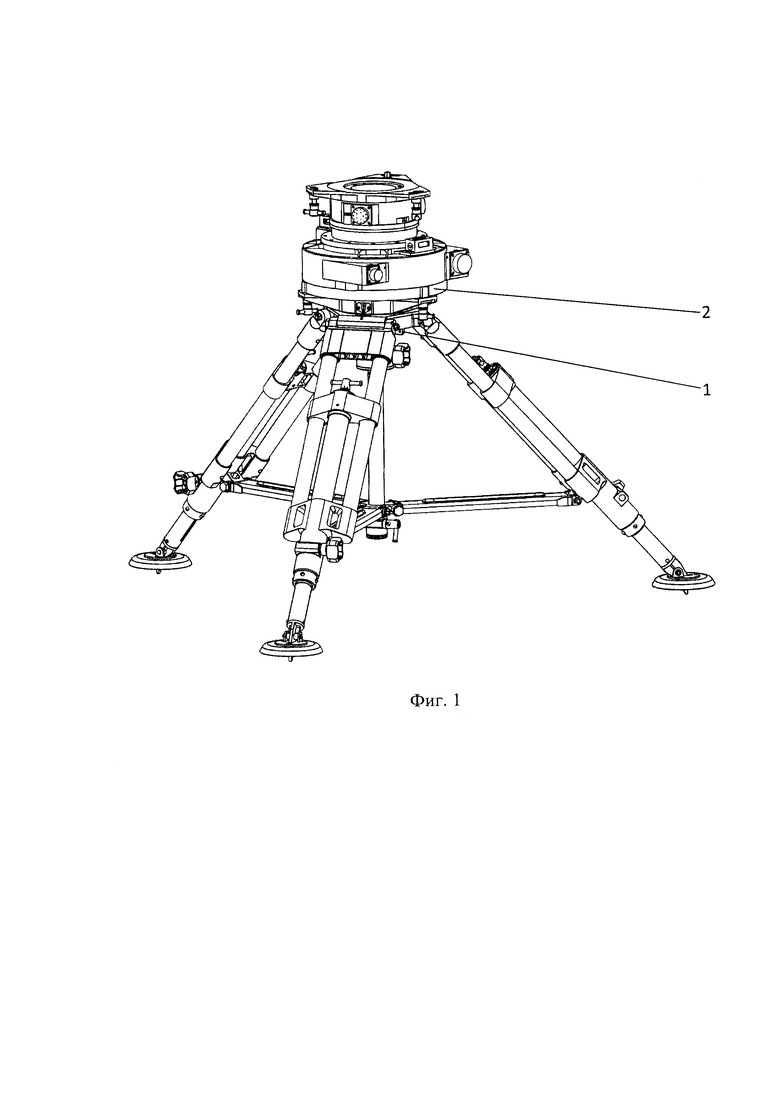
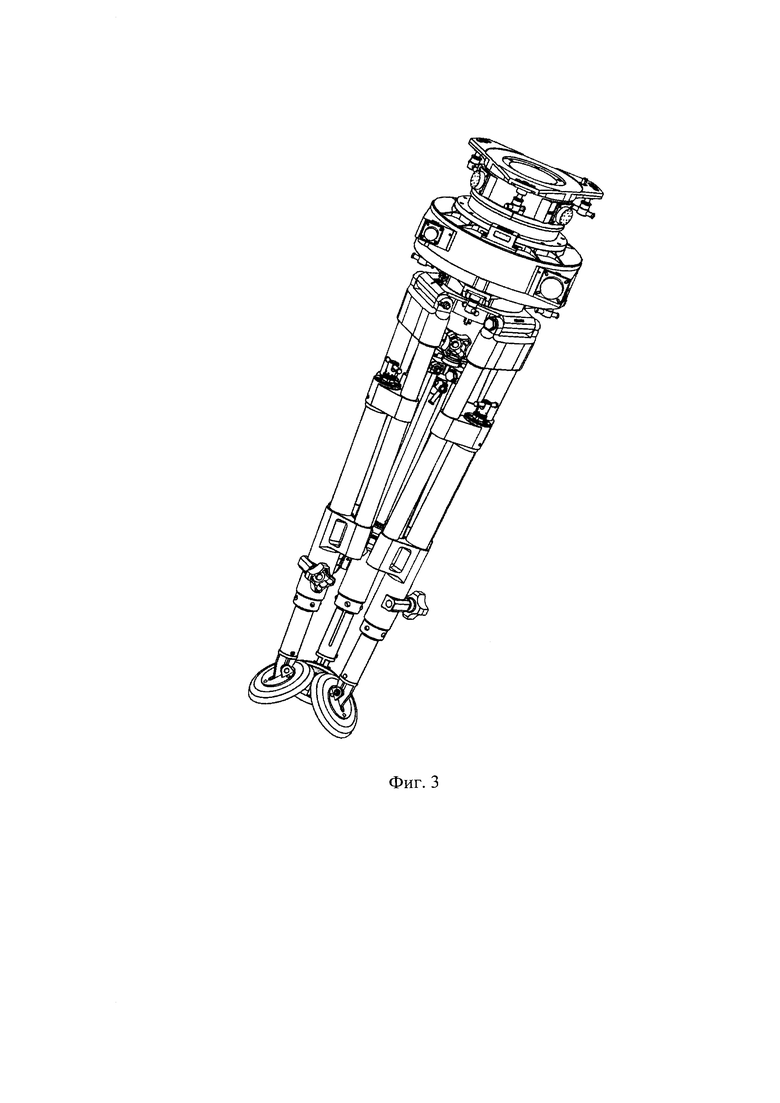
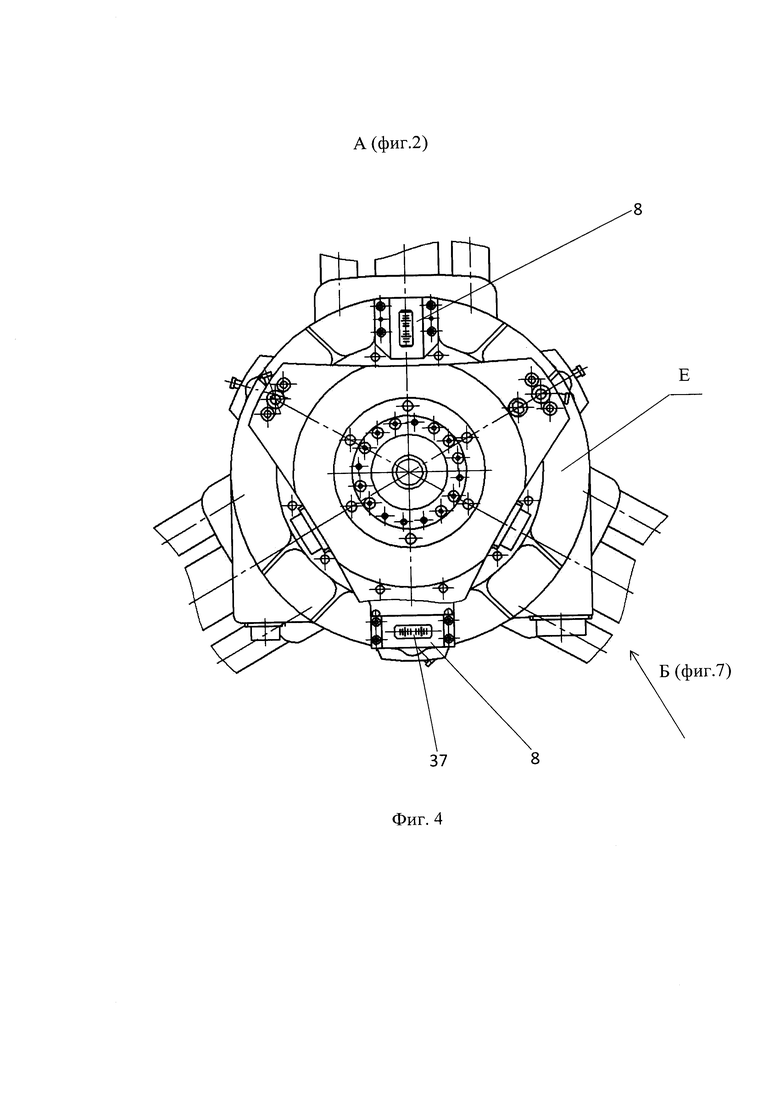
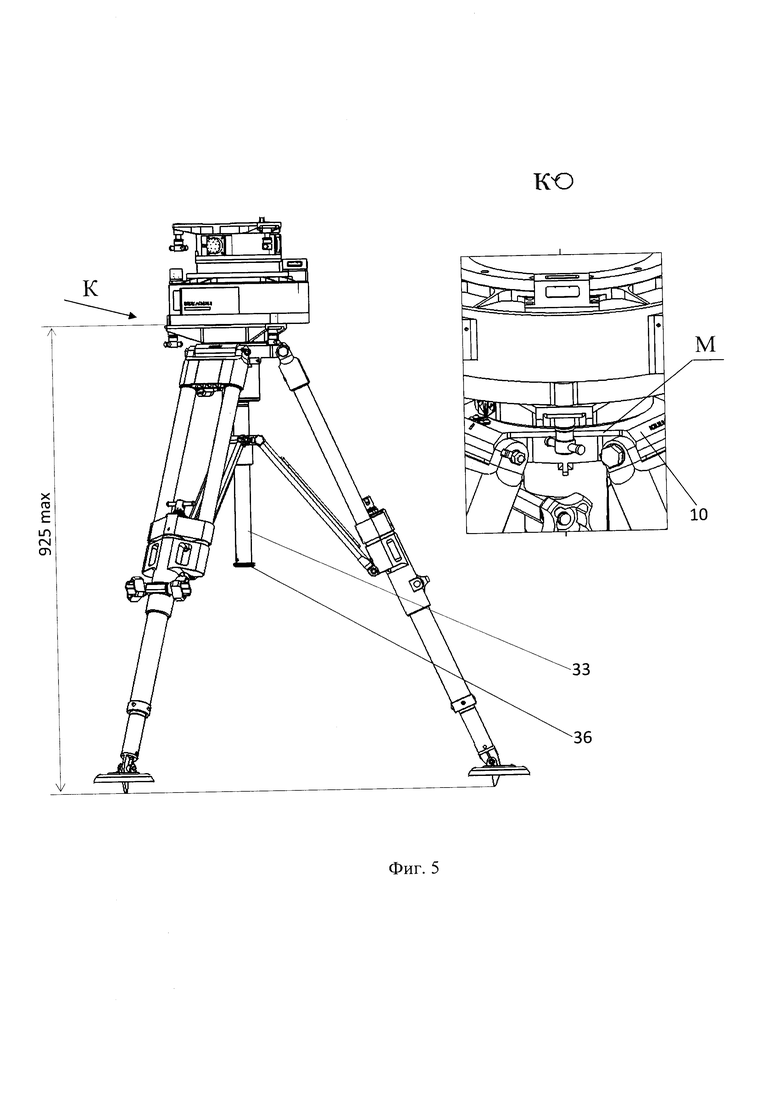
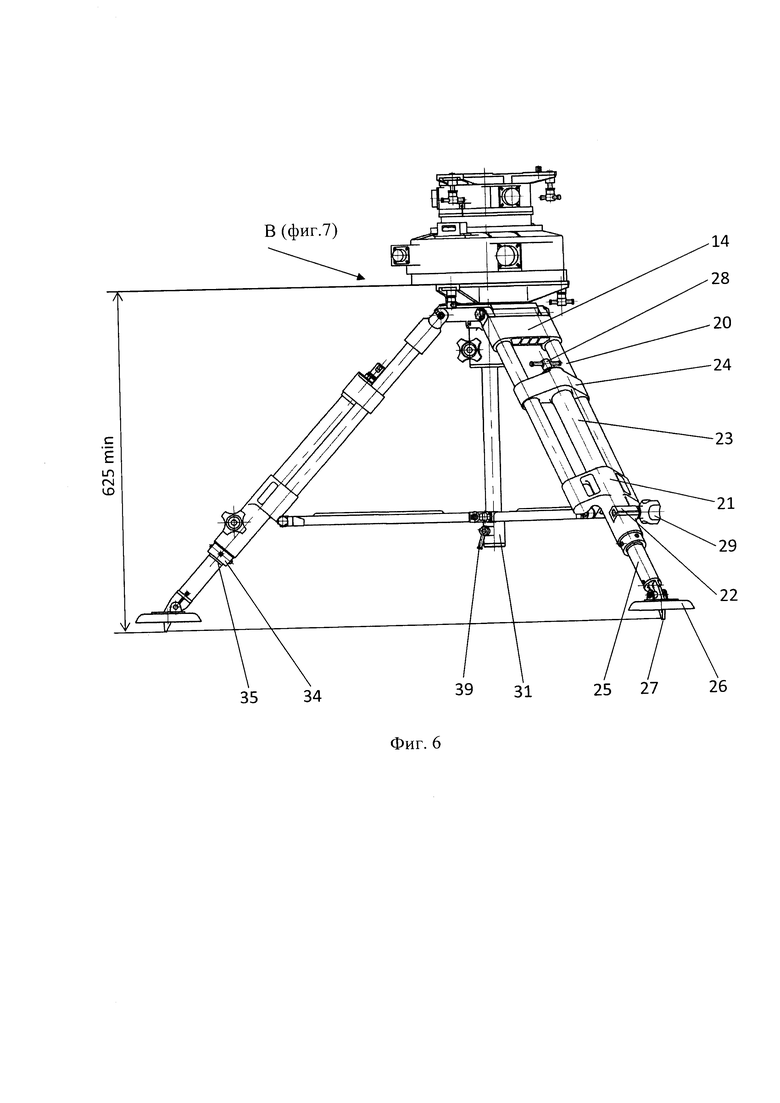
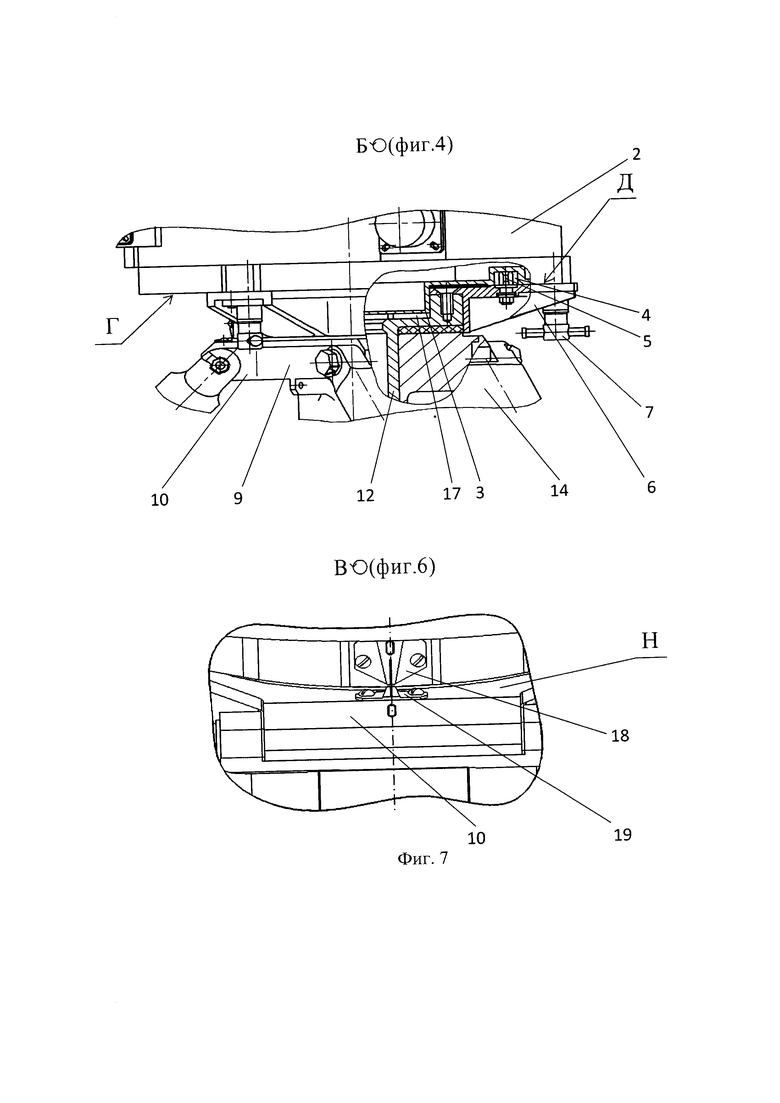
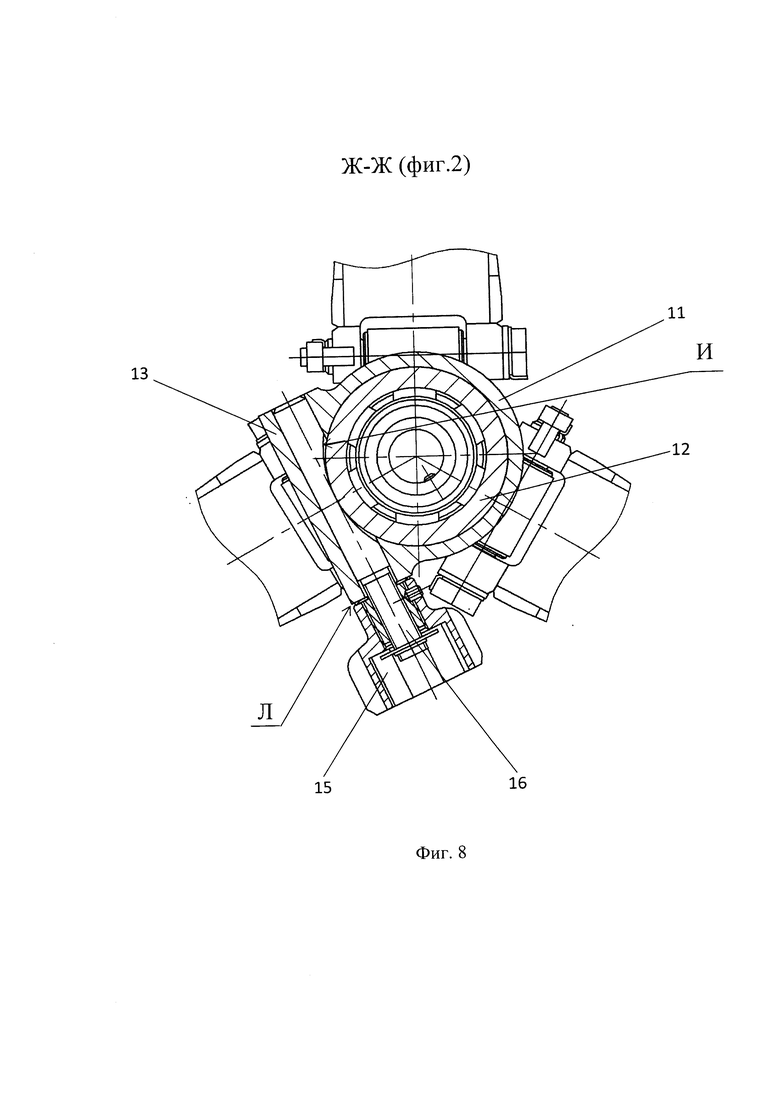
На фиг. 1 представлен общий вид устройства горизонтирования; на фиг. 2 - устройство горизонтирования в рабочем положении; на фиг. 3 - устройство горизонтирования в транспортном положении; на фиг. 4 - устройство горизонтирования, вид А (расположение уровней); на фиг. 5 - устройство горизонтирования с максимально предельным уровнем размещения приборов от опорной поверхности; на виде К - изображение ребра жесткости М (одного из трех) между боковыми поверхностями кронштейнов основания треноги; на фиг. 6 - устройство горизонтирования с минимально предельным уровнем размещения приборов от опорной поверхности; на фиг. 7 вид Б - вырыв с изображением сопряжения поворотной платформы основания треноги посредством цапфы поворотной платформы с отверстием основания треноги, вид В - позиционирование поворотной платформы основания треноги относительно основания треноги совмещением индексов на боковой поверхности поворотной платформы основания треноги и поверхности Н основания треноги; на фиг. 8 разрез Ж-Ж - изображение тангенциального фиксатора цилиндрического корпуса основания.
Устройство горизонтирования состоит из треноги 1 и азимутального привода 2 (фиг. 1).
На нижней установочной поверхности Г корпуса азимутального привода 2 (фиг. 7 вид Б) имеется цапфа азимутального привода 3 (фиг. 7 вид Б) и отверстие 4 под установочный палец 5 поворотной платформы основания 6 треноги 9 для позиционирования азимутального привода на базовой поверхности Д поворотной платформы 6 основания треноги 9, на которой азимутальный привод 2 фиксируется невыпадающими винтами 7 поворотной платформы 6.
На верхней поверхности Е (фиг. 4) корпуса азимутального привода 2, параллельно его нижней установочной поверхности Г предусмотрены площадки с элементами крепления для установки двух уровней 8 с цилиндрическими ампулами 37. Площадки расположены диаметрально для удобства визуализации процесса горизонтирования устройства горизонтирования при наличии полного комплекта установленного оборудования.
Пространственно и конструктивно координаты расположения на площадках элементов крепления уровней имеют общую базу отсчета с координатами расположения отверстия 4 на нижней установочной поверхности Г корпуса азимутального привода 2 (фиг. 7 вид Б) таким образом, чтобы обеспечить симметричное расположение одного из уровней 8 с цилиндрической ампулой 37 (фиг. 4) между двумя кронштейнами 10 основания треноги (фиг. 5 вид К) и параллельное расположение продольной оси цилиндрической ампулы 37 уровня 8 боковой поверхности М ребра жесткости между боковыми поверхностями кронштейнов 10 основания треноги (фиг. 5 вид К) при совмещенных индексах 18 и 19 на боковой поверхности поворотной платформы 6 основания треноги 9 и поверхности Н основания треноги соответственно (фиг. 7 вид В). Второй уровень 8 с цилиндрической ампулой установлен на другой площадке и ориентирован перпендикулярно первому (фиг. 4).
Тренога 1 содержит основание 9 с тремя кронштейнами 10 (фиг. 7 вид Б) и отверстиями в них для шарнирного соединения с вильчатыми кронштейнами 14 (фиг. 6) трехсекционных двухуровневых телескопических ножек 38 (фиг. 2).
В центре основания 9 (фиг. 7 вид Б) треноги имеется цилиндрический корпус 11 (фиг. 2) с соосным отверстием, в котором, с возможностью свободного вращения, установлена цапфа 12 поворотной платформы 6 основания 9 треноги (фиг. 7 вид Б). Для стопорения поворотной платформы 6 основания 9 треноги на цилиндрическом корпусе 11 (фиг. 2) основания 9 треноги предусмотрен тангенциальный фиксатор 13 (фиг. 2). Вращением по часовой стрелке рукоятка 15 тангенциального фиксатора 13 цилиндрического корпуса 11 (фиг. 8) основания 9 (фиг. 7 вид Б), сопрягаясь внутренней резьбовой поверхностью с резьбовой поверхностью оси 16, перемешается вдоль нее и, упираясь торцем в боковую поверхность Л корпуса фиксатора 13, втягивает в себя ось 16 по касательной траектории к цилиндрической поверхности цапфы 12 поворотной платформы 6 основания треноги 9 (фиг. 7 вид Б). При этом ось 16 (фиг. 8), воздействуя с усилием боковой поверхностью И цилиндрической проточки на боковую поверхность цапфы 12 поворотной платформы 6 (фиг. 7 вид Б), выполняя роль клина, выбирает зазор между поверхностью внешнего диаметра цапфы 12 поворотной платформы 6 и поверхностью внутреннего диаметра соосного отверстия цилиндрического корпуса 11 (фиг. 2) основания 9 треноги (фиг. 7 вид Б). Таким образом, возникает фрикционное смыкание упомянутых выше поверхностей и стопорение поворотной платформы 6 основания 9 треноги (фиг. 7 вид Б).
Схема работы тангенциального фиксатора 13 цилиндрического выступа 11 основания 9 (фиг. 8) унифицирована для всех случаев использования в треноге.
В поворотной платформе 6 основания 9 треноги (фиг. 7 вид Б), соосно цилиндрической поверхности цапфы 12 поворотной платформы 6, на базовой поверхности Д имеется посадочное отверстие 17 и установочный палец 5 для установки и позиционирования азимутального привода 2 (фиг 1). Сама поворотная платформа 6 основания 9 треноги (фиг. 7 вид Б) в походном состоянии устройства горизонтирования и в процессе горизонтирования устройства стопорится тангенциальным фиксатором 13 цилиндрического корпуса 11 (фиг. 8) основания относительно основания треноги 9 (фиг. 7 вид Б) и позиционируется совмещением индексов 18 и 19 (фиг. 7 вид В) на боковой поверхности поворотной платформы 6 основания 9 и поверхности Н основания 9 треноги соответственно.
К кронштейнам 10 основания треноги 9 посредством вильчатых кронштейнов 14 (фиг. 7 вид Б) шарнирно присоединены трехсекционные, двухуровневые телескопические ножки 38 (фиг. 2). Первая секция трехсекционной, двухуровневой телескопической ножки 38 представляет собой рамную конструкцию и состоит из двух трубчатых стоек 20, соединенных с двух сторон кронштейнами 14 и 21 (фиг. 6). На кронштейне 21 имеется тангенциальный фиксатор 22 для стопорения цилиндрического корпуса 23 второй секции трехсекционной двухуровневой телескопической ножки 38. Вторая секция трехсекционной двухуровневой телескопической ножки состоит из кронштейна 24 (фиг. 6) с цилиндрическим корпусом 23 прецизионного механизма горизонтирования в виде винтовой пары, размещенного внутри цилиндрического корпуса 23 второй секции, и рукоятки вращения винта 28 прецизионного механизма горизонтирования (фиг. 6), перемещающего возвратно поступательно третью секцию 25 трехсекционной двухуровневой телескопической ножки 38 с чашкой 26 и опорным наконечником 27 (фиг. 6). Необходимо отметить, что вторая и третья секции трехсекционной двухуровневой телескопической ножки 38 (фиг. 2) перемещаются в плоскости параллельной и на некотором расстоянии от плоскости расположения трубчатых стоек 20 (фиг. 6) первой секции трехсекционной двухуровневой телескопической ножки 38. Это достигается конструкцией кронштейнов 21 и 24 (фиг. 6) первой и второй секции соответственно трехсекционной двухуровневой телескопической ножки 38 (фиг. 2). Такая конструкция трехсекционных двухуровневых телескопической ножек 38 спроектирована с целью обеспечения свободного доступа к рукоятке вращения винта 28 прецизионного механизма горизонтирования (фиг. 6) второй секции трехсекционной двухуровневой телескопической ножки 38 при юстировочном горизонтировании устройства, а также для увеличения жесткости и прочности конструкции ножек, и прочности конструкции устройства в целом, обеспечивающей противодействие изгибающим и крутящим моментам относительно центральной оси треноги при воздействии нормативных ветровых нагрузок и опрокидывающим моментам, возникающим в процессе эксплуатации.
Проведя воображаемую плоскость через оси двух трубчатых стоек 20 первой секции, соединив такими же плоскостями ось цилиндрического корпуса 23 второй секции и оси трубчатых стоек 20 первой секции трехсекционной двухуровневой телескопической ножки 38, получим объемную геометрическую фигуру первого класса полиэдров с основаниями в виде треугольников, проецируемых на торцы кронштейнов 21 и 24 первой и второй секции трехсекционной двухуровневой телескопической ножки соответственно (фиг. 6). В результате имеем треугольную призму с изменяемой высотой. Максимальная высота призмы, а, следовательно, наибольшая жесткость и прочность треноги 1 обеспечиваются при минимальной высоте устройства горизонтирования (фиг. 6), что позволяет увеличить массовые характеристики устанавливаемых приборов на тридцать процентов от заявленных.
Чтобы предотвратить разъезжание трехсекционных двухуровневых телескопических ножек 38 (фиг. 2) треноги 1 (фиг. 1) на ровной и гладкой поверхности, обеспечить их одновременное раскрытие и складывание для экономии времени развертывания и свертывания устройства, придать дополнительную жесткость конструкции предусмотрены среднеуровневые растяжки 30 (фиг. 2), шарнирно соединяющие кронштейны 21 первой секции трехсекционных двухуровневых телескопических ножек 38 с крестовиной центрального шарнира 31 (фиг. 6), перемещающейся возвратно-поступательно по центральной колонне 33 треноги (фиг. 2) и надежно стопорящей трехсекционные, двухуровневые телескопические ножки 38 (фиг. 2) вращением рукоятки 39 (фиг. 6) тангенциального фиксатора 32 крестовины 31 (фиг. 2) центрального шарнира при любом угле их раскрытия.
При транспортировании устройство горизонтирования находится в сложенном состоянии и выглядит как показано на фиг. 3.
При совмещенных индексах 18 и 19 на боковой поверхности поворотной платформы 6 основания 9 треноги 1 и на поверхности Н основания 9 треноги 1 соответственно (фиг. 7 вид В), цапфа 12 поворотной платформы 6 основания 9 треноги 1 (фиг. 7 вид Б) застопорена тангенциальным фиксатором 13 цилиндрического корпуса 11 (фиг. 2) основания 9 треноги 1 (фиг. 7 вид Б). Поворотная платформа 6 (фиг. 2) остается застопоренной до окончания горизонтирования устройства.
Вторая секция трехсекционных двухуровневых телескопических ножек треноги 1, состоящая из кронштейна 24 (фиг. 6) с цилиндрическим корпусом 23 прецизионного механизма горизонтирования в виде винтовой пары, размещенного внутри цилиндрического корпуса 23 второй секции и рукоятки вращения винта прецизионного механизма горизонтирования 28 (фиг. 6), перемещена до упора ограничительного кольца 34 цилиндрического корпуса 23 второй секции в торец кронштейна 21 первой секции (фиг. 6).
Третья секция 25 трехсекционных двухуровневых телескопических ножек треноги 1 для обеспечения гарантированного хода при выдвижении и втягивании в цилиндрический корпус 23 второй секции при юстировочном горизонтировании устройства в транспортном положении позиционируется кольцевой риской 35 на внешнем диаметре трубы третьей секции вровень с торцом ограничительного кольца 34 цилиндрического корпуса 23 второй секции (фиг. 6).
В сложенном состоянии трехсекционные двухуровневые телескопические ножки треноги фиксируются вращением рукоятки 39 (фиг. 6) тангенциального фиксатора 32 крестовины 31 центрального шарнира на центральной колонне 33, растяжками 30 (фиг. 2) и вращением рукоятки 29 тангенциального фиксатора 22 кронштейна 21 (фиг. 6) первой секции трехсекционных двухуровневых телескопических ножек 38 (фиг. 2).
Перед переводом треноги устройства в рабочее положение необходимо вращением рукоятки 39 (фиг. 6) освободить зажим тангенциального фиксатора 32 крестовины 31 центрального шарнира на центральной колонне 33 (фиг. 2). При перемещении крестовины 31 центрального шарнира (фиг. 2) до упора в ограничитель 36 центральной колонны 33 (фиг. 5) одновременно полностью раскрываются трехсекционные двухуровневые телескопические ножки и крестовина 31 центрального шарнира стопорится вращением рукоятки 39 (фиг. 6) тангенциального фиксатора 32 на центральной колонне 33 (фиг. 2).
Процесс предварительного горизонтирования устройства производится поочередным возвратно-поступательным перемещением второй секции трехсекционных двухуровневых телескопических ножек 38 (фиг. 2).
Вращением рукоятки 29 тангенциального фиксатора 22 кронштейна 21 первой секции (фиг. 6) происходит стопорение, или освобождение второй секции трехсекционных двухуровневых телескопических ножек. При перемещении вторая секция трехсекционных двухуровневых телескопических ножек сопрягается внутренними направляющими поверхностями кронштейна 24 второй секции с внешними направляющими поверхностями трубчатых стоек 20 первой секции, и внешней поверхностью цилиндрического корпуса 23 второй секции с внутренней направляющей поверхностью кронштейна 21 первой секции трехсекционных двухуровневых телескопических ножек (фиг. 6), что позволяет визуально привести в вертикальное положение центральную колонну 33 треноги 1 (фиг. 2).
Одновременно в процессе предварительного горизонтирования устройства устанавливается его приемлемая рабочая высота.
Пространственно и конструктивно координаты расположения элементов крепления уровней 8 с цилиндрической ампулой 37 размещенных на верхней поверхности Е корпуса азимутального привода (фиг. 4) имеют общую базу отсчета с координатами расположения отверстия 4 на нижней установочной поверхности Г корпуса азимутального привода 2 (фиг. 7 вид Б) под установочный палец 5 поворотной платформы 6 основания треноги 9, что гарантирует симметричное расположение одного из уровней 8 с цилиндрической ампулой 37 (фиг. 4)) между двумя кронштейнами 10 основания треноги (фиг. 5 вид К) и параллельное расположение продольной оси цилиндрической ампулы уровня 37 боковой поверхности М ребра жесткости между боковыми поверхностями кронштейнов 10 основания треноги (фиг. 5 вид К) при совмещенных индексах 18 и 19 на боковой поверхности поворотной платформы 6 основания треноги 9 и поверхности Н основания треноги соответственно (фиг. 7 вид В).
Для точного горизонтирования устройства используется прецизионный механизм горизонтирования в виде винтовой пары внутри цилиндрического корпуса 23 (фиг. 6) второй секции двух трехсекционных двухуровневых телескопических ножек 38 (фиг. 2) с симметрично расположенным между ними на площадке верхней поверхности Е (фиг. 4) корпуса азимутального привода уровнем 8. Вращением рукоятки 28 винта прецизионного механизма второй секции сообщается возвратно поступательное движение третьей секции 25 (фиг. 6) трехсекционных двухуровневых телескопических ножек. При одновременном или попеременном противоположном друг другу вращении рукояток 28 (фиг. 6) винта прецизионного механизма горизонтирования обеих трехсекционных двухуровневых телескопических ножек 38 (фиг. 2) третья секция 25 выдвигается из цилиндрического корпуса 23 второй секции в одной из трехсекционных двухуровневых телескопических ножек и втягивается в цилиндрический корпус 23 второй секции (фиг. 6) второй трехсекционной двухуровневой телескопической ножки, что приводит к изменению угла наклона в ту или другую сторону поверхности Н основания 9 треноги (фиг. 7 вид В), и изменению угла наклона оси цилиндрической ампулы 37 уровня 8 (фиг. 4) на верхней поверхности Е корпуса азимутального привода. После установки таким образом пузырька цилиндрической ампулы 37 уровня 8 (фиг. 4) в нулевое положение, производятся те же действия прецизионным механизмом горизонтирования третьей трехсекционной двухуровневой телескопической ножки для горизонтирования второго уровня в направлении перпендикулярном предыдущему.
Устройство позволяет обеспечить точность горизонтирования как в комплектации изображенной на фиг. 1, так и при установке полного комплекта оборудования, и регулировать положение приборов по высоте, а также обеспечивает надежное, устойчивое, без опрокидывания и отрыва от опорной поверхности функционирование приборов в диапазоне высот от 625 мм до 925 мм (фиг. 5, фиг. 6) от опорной до базовой поверхности Д поворотной платформы 6 основания 9 треноги 1 (фиг. 7 вид Б), при минимальной собственной массе, благодаря конструкции, обеспечивает поперечную и продольную жесткость для противодействия изгибающим и крутящим моментам относительно центральной оси устройства при воздействии нормативных ветровых нагрузок, влияющих на точность показания приборов.
Все перечисленное позволяет обеспечить удобство эксплуатации, как на подготовленной, так и на неподготовленной позиции, сокращает время перевода треноги из транспортного положения в рабочее и обратно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМИРУЕМАЯ ТРЕХСЕКЦИОННАЯ МЕБЕЛЬ ДЛЯ СИДЕНИЯ ИЛИ ЛЕЖАНИЯ | 2022 |
|
RU2832410C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Теплогенератор универсальный, мобильный с телескопической дымовой трубой | 2022 |
|
RU2792511C1 |
| УЗЕЛ ОРИЕНТИРОВАНИЯ И ГОРИЗОНТИРОВАНИЯ | 2021 |
|
RU2755574C1 |
| Многофункциональный стол-трансформер | 2023 |
|
RU2818943C1 |
| ПЕРЕНОСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ РАЗВЕДКИ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2023 |
|
RU2832238C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| ЗНАК "ПРЕДУПРЕЖДАЮЩИЙ ТРЕУГОЛЬНИК" | 2012 |
|
RU2501094C1 |
| ШТАТИВ | 2018 |
|
RU2673446C1 |
Данное изобретение относится к области машиностроения, состоящего из треноги, имеет основание с поворотной платформой и три телескопические ножки с элементами прецизионного горизонтирования в виде винтовой пары, раскрывающиеся и складывающиеся одновременно посредством среднеуровневых растяжек, шарнирно соединенных с кронштейнами телескопических ножек и крестовиной центрального шарнира с тангенциальным фиксатором, перемещающейся возвратно-поступательно по центральной колонне треноги и надежно фиксирующей положение трехсекционных двухуровневых телескопических ножек при любом угле их раскрытия, на верхней поверхности неподвижной части корпуса азимутального привода, конструктивно позиционированного, установленного и зафиксированного невыпадающими винтами на поворотной платформе основания треноги, размещены два взаимно перпендикулярных и диаметрально расположенных уровня с цилиндрическими ампулами для контроля горизонтирования устройства. Достигается создание удобного и надежного устройства горизонтирования для приборов массой до 150 кг, обеспечивающего точность горизонтирования. 8 ил.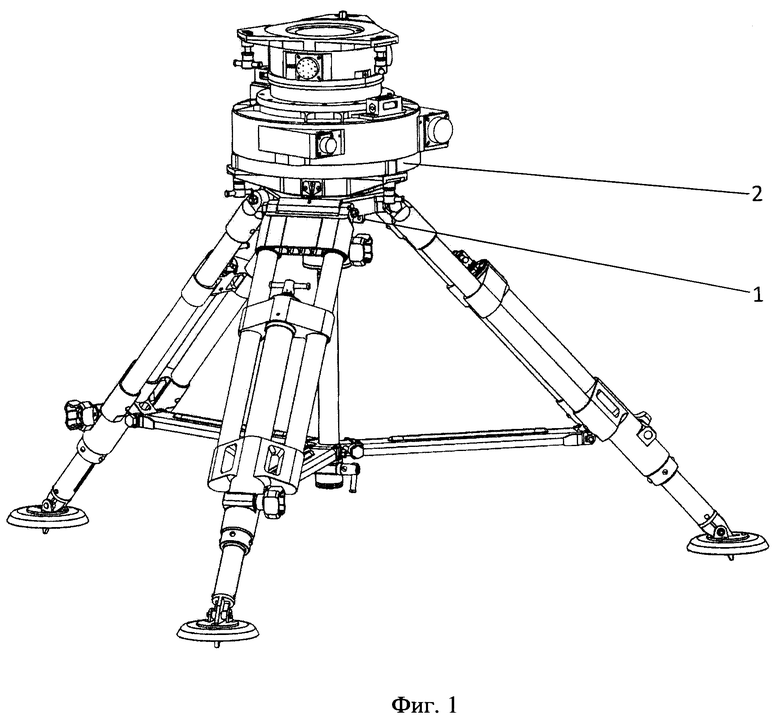
Устройство горизонтирования, содержащее треногу, состоящую из основания с поворотной платформой, трех трехсекционных двухуровневых телескопических ножек, шарнирно соединенных вильчатыми кронштейнами с тремя кронштейнами основания, среднеуровневых растяжек, крестовины центрального шарнира с тангенциальным фиксатором и центральной колонны, и азимутальный привод, состоящий из неподвижной и подвижной части с элементами крепления приборов, который может быть заменен специальной площадкой, размещенный на поворотной платформе основания треноги, отличающееся тем, что на нижней установочной поверхности неподвижной части корпуса азимутального привода имеется цапфа азимутального привода и отверстие под установочный палец поворотной платформы основания треноги для позиционирования азимутального привода на базовой поверхности поворотной платформы основания треноги, на которой азимутальный привод фиксируется невыпадающими винтами поворотной платформы, а на верхней поверхности неподвижной части корпуса азимутального привода, параллельно его нижней установочной поверхности, предусмотрены площадки с элементами крепления для установки двух взаимно перпендикулярных и диаметрально расположенных уровней с цилиндрическими ампулами, причем координаты отверстия на нижней установочной поверхности неподвижной части корпуса азимутального привода под установочный палец поворотной платформы основания треноги имеют общую базу отсчета с координатами элементов крепления уровней с цилиндрическими ампулами, размещенных на площадках, и выбраны таким образом, чтобы обеспечить симметричное расположение одного из уровней с цилиндрической ампулой между двумя кронштейнами основания треноги и параллельное расположение продольной оси цилиндрической ампулы боковой поверхности ребра жесткости между боковыми поверхностями этих кронштейнов основания треноги при совмещенных индексах на боковой поверхности поворотной платформы основания треноги и верхней поверхности основания треноги, при этом в центре основания треноги имеется цилиндрический корпус с соосным отверстием, в котором установлена цапфа поворотной платформы, которая при горизонтировании устройства застопорена тангенциальным фиксатором цилиндрического корпуса основания треноги и находится в таком состоянии до окончания горизонтирования устройства, которое обеспечивается трехсекционной двухуровневой телескопической конструкцией ножек треноги, шарнирно соединенных вильчатыми кронштейнами с кронштейнами основания треноги, и растяжками, шарнирно соединенными с кронштейнами первой секции трехсекционных двухуровневых телескопических ножек и крестовиной центрального шарнира, при которой кронштейн с цилиндрическим корпусом второй секции ножек и прецизионным механизмом горизонтирования с третьей секцией внутри имеет возможность перемещаться возвратно-поступательно по внешним направляющим поверхностям трубчатых стоек первой секции и по внутренней направляющей поверхности кронштейна первой секции в плоскости параллельной и на некотором расстоянии от плоскости расположения двух трубчатых стоек первой секции, которая с плоскостями, соединяющими ось цилиндрического корпуса второй секции и оси трубчатых стоек первой секции трехсекционной двухуровневой телескопическиой ножки, образует жесткую объемную геометрическую фигуру первого класса полиэдров с основаниями в виде треугольников, проецируемых на торцы кронштейнов первой и второй секции, и представляет из себя треугольную призму с изменяемой высотой при выборе рабочей высоты устройства в процессе его предварительного горизонтирования посредством возвратно-поступательного перемещения второй секции ножек с периодическим стопорением, или освобождением второй секции трехсекционных двухуровневых телескопических ножек вращением рукоятки тангенциального фиксатора кронштейна первой секции, в результате которого центральная колонна треноги визуально устанавливается в вертикальное положение, после чего, при строгом конструктивном позиционировании друг к другу корпуса азимутального привода, поворотной платформы и треноги, ось цилиндрической ампулы уровня, находящегося на верхней плоскости корпуса привода, визуализируется симметрично между двумя кронштейнами основания треноги параллельно поверхности ребра жесткости между боковыми поверхностями кронштейнов основания треноги при совмещенных индексах на боковой поверхности поворотной платформы основания треноги и верхней поверхности основания треноги, что позволяет при одновременном или попеременном противоположном друг другу вращении рукояток винта прецизионного механизма второй секции обеих трехсекционных двухуровневых телескопических ножек, выдвигаться третьей секции из цилиндрического корпуса второй секции в одной из трехсекционных двухуровневых телескопических ножек и втягиваться в цилиндрический корпус второй секции второй трехсекционной двухуровневой телескопической ножки, что способствует изменению угла наклона в ту или другую сторону поверхности основания треноги и изменению угла наклона оси цилиндрической ампулы уровня на верхней поверхности корпуса азимутального привода, и позволяет, установив таким образом пузырек цилиндрической ампулы уровня в нулевое положение, произвести те же действия механизмом прецизионного горизонтирования третьей трехсекционной двухуровневой телескопической ножки и отгоризонтировать второй уровень в направлении, перпендикулярном предыдущему.
| ЦЕНТРИРУЮЩИЙ ШТАТИВ | 2001 |
|
RU2184935C1 |
| US 2017113079 A1, 27.04.2017 | |||
| US 2010224745 A1, 09.09.2010 | |||
| НОВАЯ СТАБИЛИЗИРУЮЩАЯ СИСТЕМА ДЛЯ ГАЛОИДИРОВАННЫХ ПОЛИМЕРОВ | 2004 |
|
RU2341542C2 |
