Изобретение относится к области испытаний на стойкость к механическим внешним воздействующим факторам машин, приборов и других технических изделий. Изобретение может быть использовано в машиностроении, ракетно-космической, авиационной и в других отраслях техники для экспериментального определения динамических характеристик гибких протяженных конструкций на низких частотах, например, космических солнечных батарей орбитальных станций.
Длина современных солнечных батарей может быть более 10 м, а частота первого тона собственных колебаний батарей менее 0,1 Гц. В этом случае для экспериментального определения таких динамических характеристик конструкций, как собственные частоты, коэффициенты затухания колебаний, формы колебаний (модальные испытания) требуется способ, который позволяет возбуждать колебания испытуемого объекта на низких частотах с возможно большой амплитудой (до нескольких сотен миллиметров). Это необходимо для достижения эксплуатационных уровней нагружения испытуемого объекта, поскольку динамические характеристики подобных изделий зависят от уровня нагружения, особенно коэффициенты затухания колебаний.
Известные способы определения динамических характеристик конструкций представлены в ГОСТ 30630.1.1-99. Испытания по этому стандарту проводят одним (или несколькими) из следующих методов:
100-1 - метод плавного изменения частоты синусоидальных колебаний;
100-2 - метод удара для определения низшей резонансной частоты узлов изделия, имеющих кусочно-линейную упругую характеристику;
100-2.1 - метод воздействия ударов с одинаковыми параметрами;
100-2.2 - метод воздействия ударов с переменными параметрами;
100-3 - метод свободных колебаний для определения собственных частот и декрементов затуханий изделий;
100-4 - метод ступенчатого изменения частоты (метод фиксированных частот);
100-5 - метод воздействия широкополосной случайной вибрации.
Методы удара (100-2, 100-2.1, 100-2.2) малопригодны при определении динамических характеристик протяженных упругих объектов, таких как солнечные батареи, на низких частотах. Спектр удара имеет широкополосный характер, основная энергия удара находится в области высоких частот. Чтобы передать достаточный импульс объекту испытаний для возбуждения первых тонов на низких частотах прилагаемое усилие от ударного устройства может значительно превышать допустимое значение и повредить объект испытаний.
Методы 100-1, 100-4, 100-5 являются методами возбуждения вынужденных колебаний при помощи вибрационных установок. Эти методы могут успешно использоваться при определении динамических характеристик конструкции и для протяженных гибких объектов при низких уровнях нагружения на низких частотах, т.к. в настоящее время имеются достаточно чувствительные низкочастотные датчики колебаний. Влияние внешних помех может быть скомпенсировано за счет статистического усреднения результатов испытаний, хотя при этом существенно увеличивается время испытаний. Но на низких частотах, соответствующих первым резонансным частотам испытуемых гибких конструкций, эксплуатационных уровней нагружения такими методами достичь нельзя. Амплитуда возбуждаемых при этом колебаний ограничена ходом штока вибрационных установок и, как правило, не превышает сотни миллиметров.
Известен также способ проведения модальных испытаний многосегментных нежестких конструкций (патент RU 2662255, опубликован 25.07.2018, Бюл. №21). В этом способе также ставится задача проведения модальных испытаний протяженных конструкций, у которых перемещения для разных мод колебаний могут быть значительными (от долей до десятков сантиметров), характерные частоты в диапазоне 0,1-10 Гц, а характерные силы, возбуждающие колебания в диапазоне 0,01-1 Н. При этом компенсируемый вес сегментов варьируется в пределах до нескольких десятков килограммов. По этому способу испытуемая конструкция обезвешивается в горизонтальном положении путем установки на аэростатические опоры. Возбуждение колебаний конструкции при этом осуществляется через аэростатические опоры при помощи тех же электродинамических вибраторов, которые не позволяют достигать больших амплитуд колебаний. Возбуждение мод колебаний производится только в точках расположения аэростатических опор, а не в точках, где ожидаются максимальные амплитуды колебаний, что более выгодно. В результате некоторые моды могут не возбудиться, а малая амплитуда колебаний при испытаниях приводит к погрешностям в определении динамических характеристик из-за их нелинейности. Используемое оборудование по этому патенту сложно и дорого, поскольку состоит из ряда универсальных стоек, состоящих из нескольких кинематически связанных между собой платформ с линейными и электродинамическими приводами с обратной связью, управляемых по шести степеням свободы специальным контроллером.
Известен способ определения динамических характеристик протяженных конструкций, изложенный в публикации В.Н. Зимина «Экспериментальное определение динамических характеристик крупногабаритных трансформируемых космических конструкций», (Вестник МГТУ им. Н.Э. Баумана. Сер. «Машиностроение». 2011, №1, стр. 47). В этой публикации излагается способ определения динамических характеристик аналогичный методу 100-1 по ГОСТ 30630.1.1-99. При этом уровень динамического воздействия при испытаниях выбирался минимальным. Но минимальный уровень динамического нагружения не позволяет достигать эксплуатационных уровней для конструкций с большой амплитудой колебаний при эксплуатационных нагрузках, такой метод определения динамических характеристик в этом случае приводит к существенным погрешностям.
Известны способы определения динамических характеристик протяженных конструкций, изложенные в диссертации Пугача Игоря Юрьевича (ОАО «Корпорация «ВНИИЭМ», Москва 2015 г., стр. 28). Здесь для более детального анализа поведения конструкции в области частот (до 40 Гц) рекомендуется метод ненормированного возбуждения. Ненормированное возбуждение задается посредством удара или раскачивания конструкции вручную, или с помощью начального отклонения конструкции с последующим ее освобождением. Автор диссертации считает такой подход актуальным для протяженных элементов, например для фотоэлектрических батарей, протяженных антенн, а также массивных сборок с низкой собственной частотой. Для проведения модальных испытаний протяженных конструкций объекты испытаний необходимо подвешивать (п. 2.2, 2.2.1, с. 46 диссертации). При этом подвеска должна быть податливой, точки крепления подвески должны быть с малой амплитудой, а точки для возбуждения колебаний с большой. Как найти эти точки и как обеспечить достаточную податливость подвески в диссертации не раскрыто. В разделах (п. 5.3.1, п. 5.3.2, с. 123-124) диссертации описаны модальные испытания динамического макета космического корабля. По приведенным материалам нельзя идентифицировать использованный метод определения динамических (модальных характеристик). Не раскрыто, как и чем осуществлялось возбуждение колебаний аппарата, каким образом осуществлялось «раскачивание аппарата по заданной форме».
Подвесная система существенно меняет динамические характеристики конструкции. В этом случае повышаются собственные частоты образовавшейся системы подвеска - объект испытаний, изменяется форма собственных колебаний. При тех же возмущающих усилиях уменьшается максимальная амплитуда колебаний. В результате экспериментально определяются не динамические характеристики объекта испытаний, а характеристики системы подвеска-объект испытаний, что не одно и то же.
Из перечисленных выше способов определения динамических характеристик только метод свободных колебаний (ГОСТ 30630.1.1-99, метод 100-3, раздел 4.9, с. 6) может обеспечить максимальную амплитуду колебаний изделия при испытаниях. Этот метод принят за прототип.
В указанном методе изделие с установленными на требуемых деталях датчиками колебаний закрепляют на жестком основании известным способом, предусмотренным для эксплуатации изделия. К изделию вблизи центра масс прилагают растягивающую силу в направлении, где ожидается наибольшая амплитуда колебаний. Затем изделие резко освобождают от действия силы. Одним из способов осуществления указанного действия является крепление к изделию каната с подвешенным грузом с последующей обрезкой каната (для горизонтально направленной силы - горизонтально натянутого каната с подвеской груза в середине). Проводят с соответствующей чувствительностью и точностью запись затухающих колебаний. По этой записи определяют собственную частоту колебаний fk=1/(tn+1-tn) (n - число циклов колебаний). По последовательности максимальных значений колебаний в той части записи, где затухание зафиксировано наиболее четко, определяют относительное демпфирование конструкции по рисунку или расчетом по формуле:
где Yn, Yn+1 - амплитуды двух соседних колебаний на k-й частоте.
Устройство для осуществления этого способа представляет канат с закрепленным на нем грузом.
Известный способ имеет ряд недостатков.
Приложение растягивающей силы вблизи центра масс изделия может привести к потере (невозбуждению) тонов собственных колебаний на тех резонансных частотах, чьи формы собственных колебаний имеют вблизи центра тяжести изделия узлы. В частности, центр масс находится, как правило, на оси симметрии солнечных батарей. Поэтому могут не возбуждаться крутильные колебания вокруг оси симметрии.
Точка приложения растягивающей силы может находиться на большой высоте (примерно половина длины солнечной батареи), что приводит к большим неудобствам при проведении испытаний.
Определение резонансных частот по графику с амплитудами колебаний в зависимости от времени, как в прототипе, имеет тот недостаток, что таким образом можно определять одну - две резонансных частоты с наименьшим затуханием. Остальные резонансные частоты просто трудно различимы. Если две резонансные частоты близки между собой, их также трудно различить во временном процессе.
В прототипе не предусмотрено определение таких динамических характеристик, как формы собственных колебаний, эффективной массы и податливости собственных колебаний. Для определения этих характеристик, как будет показано далее, необходимо знать изменение в зависимости от времени действующей на испытуемое изделие прилагаемой силы.
Заявленное изобретение направлено на устранение перечисленных недостатков.
Задачей изобретения является выявление большого количества резонансных частот в исследуемом диапазоне низких частот (менее 0,5 Гц) и больших амплитуд колебаний, где не работают электродинамические вибраторы, и определение более полного набора динамических характеристик: коэффициентов затухания, форм колебаний, эффективных масс и податливостей.
Техническим результатом изобретения является возможность определения коэффициентов затухания собственных колебаний, формы и частоты собственных колебаний, модальных масс и модальных податливостей для протяженных изделий, у которых максимальная эксплуатационная амплитуда колебаний превышает 80-100 мм, а также обеспечение нормирования частотного спектра силового возбуждения и повышения достоверности результатов испытаний за счет исключения операции обезвешивания конструкции.
Технический результат изобретения достигается тем, что в способе экспериментального определения динамических характеристик гибких протяженных конструкций, заключающемся в том, что упомянутую конструкцию с установленными на нем датчиками колебаний закрепляют на жестком основании способом, предусмотренным для эксплуатации упомянутой конструкции, к которой прилагают растягивающую силу в направлении, где ожидается наибольшая амплитуда колебаний, затем резко освобождают конструкцию от действия растягивающей силы, регистрируют свободные и затухающие колебания, при этом растягивающую силу прикладывают к свободному концу конструкции с установленным на нем датчиком силы, наиболее удаленному от места крепления, в пучностях ожидаемых собственных форм колебаний, перед освобождением конструкции от действия силы приложенную силу плавно увеличивают до требуемого значения и выдерживают необходимое время, тем самым формируют входной спектр действующей силы в заданном частотном диапазоне, полученный путем преобразования временных сигналов от датчика силы, формируют выходной спектр колебаний, полученный путем преобразования временных сигналов от датчиков колебаний, а затем по соотношению полученных выходных и входного спектров зарегистрированных временных сигналов определяют частотную характеристику податливости, по которой судят о динамических характеристиках гибкой протяженной конструкции.
Кроме того, гибкую протяженную конструкцию закрепляют на основании вертикально вниз.
Сущность изобретения поясняется графическими материалами: чертежами (фиг. 1-13) и таблицей 1.
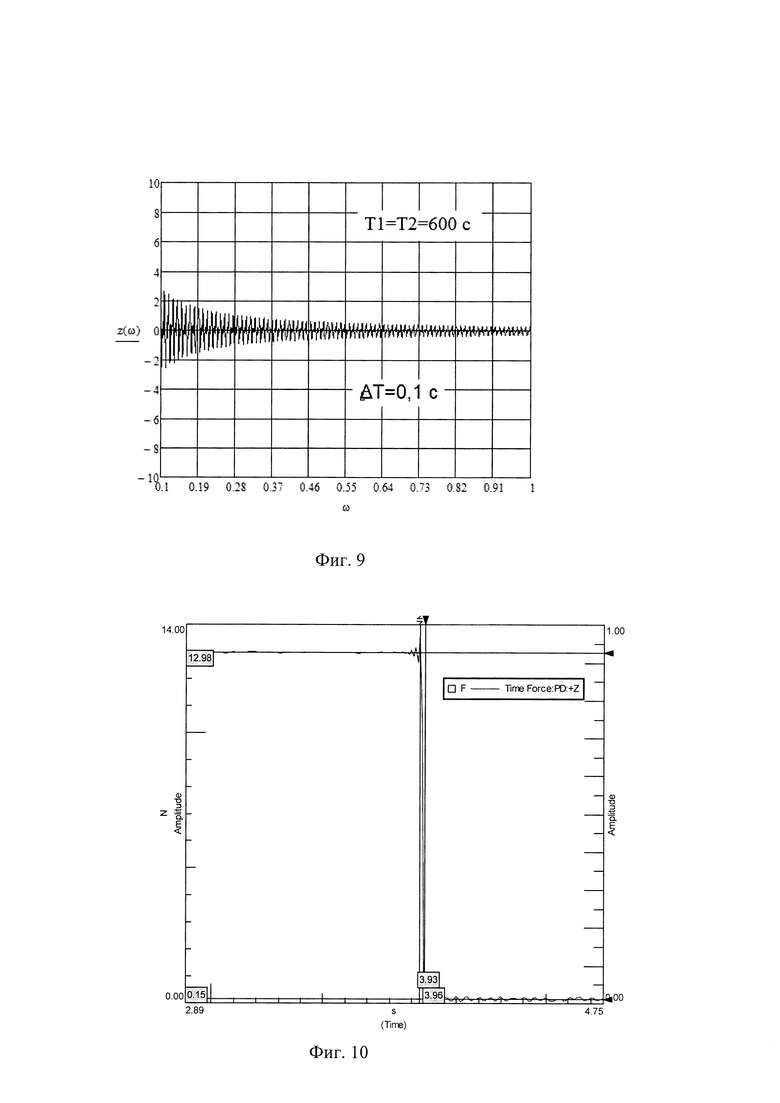
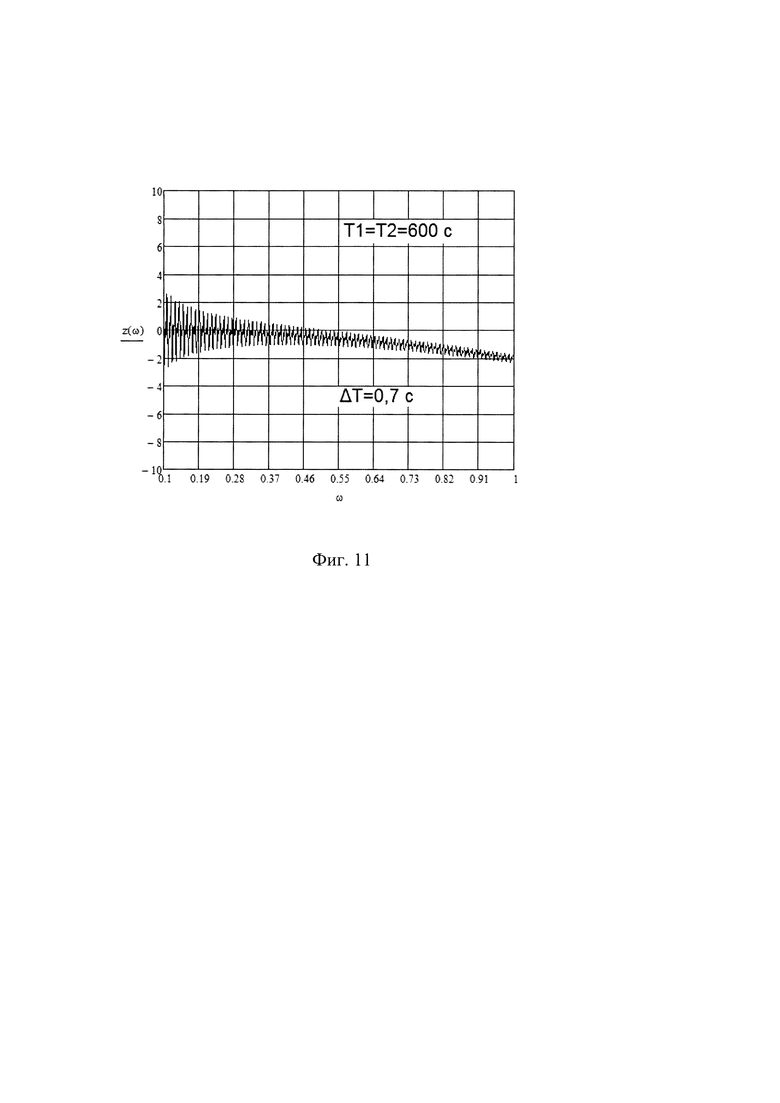
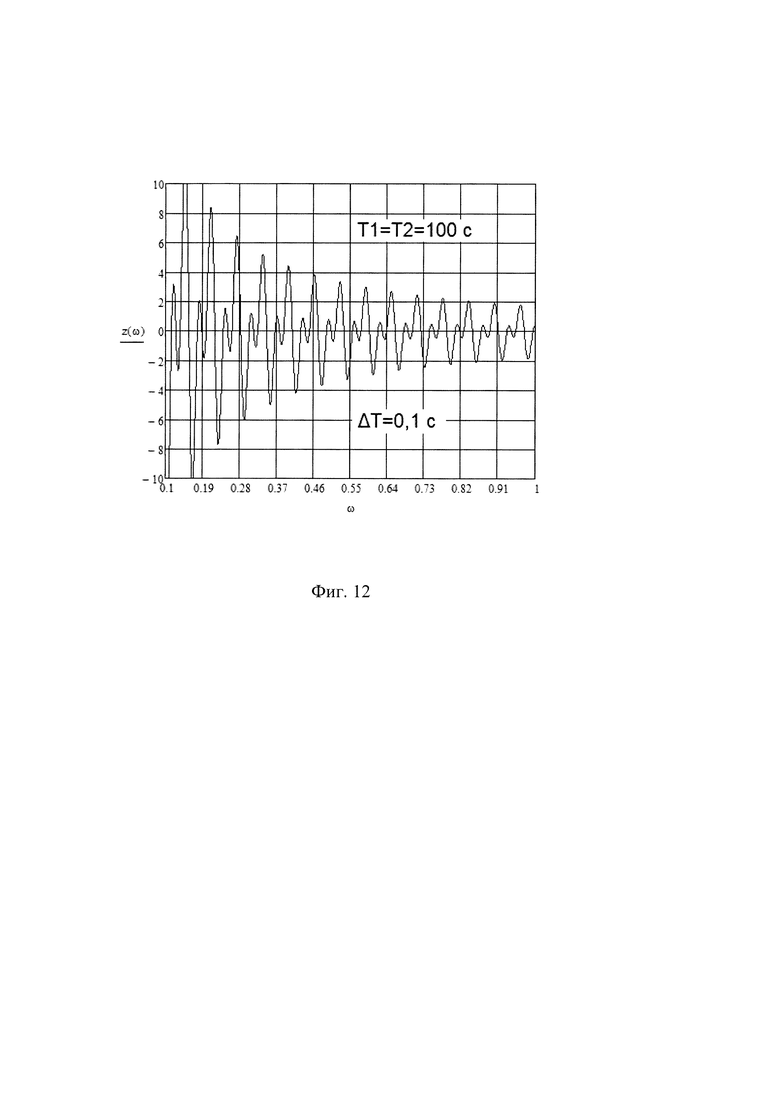
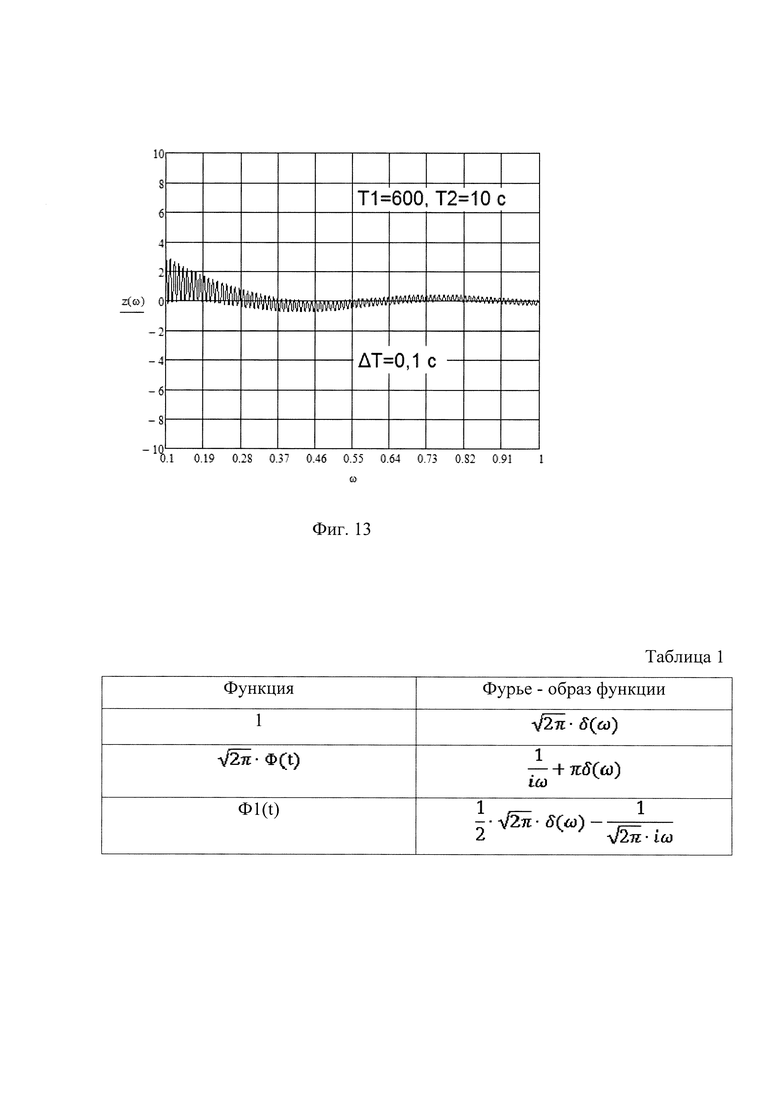
На фиг. 1 и 2 представлен пример устройства для осуществления заявленного способа. На фиг. 3 и 4 представлены записи колебаний солнечной батареи для различных интервалов времени. На фиг. 5 представлен спектр колебаний точки на солнечной батарее в формате мнимая и действительная части. На фиг. 6 представлена типичная зависимость от времени действующей на солнечную батарею силы при испытаниях. На фиг. 7 и 8 представлены графики функции Хевисайда и «идеальной» ступеньки. На фиг. 9, 11, 12, 13 представлены графики относительной разницы в процентах между спектром «идеальной» ступеньки и спектрами, прикладываемых к изделию сил при испытаниях для различных характерных времен нагружающей силы (фиг. 6). На фиг. 10 представлен график изменения приложенной силы при разрезании шнура ножницами во время испытаний солнечной батареи. В таблице 1 представлены Фурье-образы функций, используемых для обоснования заявленного изобретения.
Осуществление заявленного способа может быть продемонстрировано на примере работы устройства, представленного на фиг. 1 и 2.
Здесь: 1 - объект испытаний (солнечная батарея);
2 - стапель с ответным устройством крепления объекта испытаний;
3 - точки приложения возбуждающей (растягивающей) силы;
4 - кронштейн;
5 - подставка;
6 - амортизатор;
7 - груз;
8 - шкив;
9 - разрываемый участок шнура;
10 - датчик силы, установленный на свободном конце солнечной батареи;
11 - датчики колебаний;
12 - шнур.
Объект испытаний (например, солнечную батарею) 1 с установленными на нем датчиками колебаний 11 закрепляют на стапеле 2 с жестким ответным устройством способом, предназначенным для эксплуатации солнечной батареи. Это подразумевает, что ответное устройство имеет штатную конфигурацию, а солнечная батарея крепится штатным крепежом, затянутым штатным моментом. Жесткость стапеля 2 с ответным устройством необходима для исключения влияния собственных частот стапеля с ответным устройством на динамические характеристики объекта испытаний. Закрепление способом, предназначенным для эксплуатации солнечной батареи также важно, поскольку контактная жесткость в зоне крепления существенно сказывается на собственных частотах закрепленной конструкции.
Далее к солнечной батарее 1 прикладывают растягивающую силу, чтобы создать начальную деформацию для осуществления свободных колебаний. При этом контролируют весь процесс от начала нагружения конструкции до сброса силы. Важно выбрать точку приложения силы 3 с тем, чтобы возбудить формы собственных колебаний солнечной батареи 1 в интересующем разработчика солнечной батареи диапазоне частот. Выгоднее всего прикладывать усилие в точке максимальной амплитуды формы собственных колебаний (см. Брюль и Къер. Испытания конструкций, ч. 1 Измерения механической подвижности. Январь 1989 г., стр. 44). Как правило, все формы собственных колебаний имеют максимальные амплитуды на свободном конце объекта испытаний, наиболее удаленном от точки закрепления, в пучностях ожидаемых собственных форм колебаний. В нашем случае это точка А на солнечной батарее 1 (фиг. 1).
На фиг. 2 представлено устройство для приложения растягивающей силы к солнечной батарее. Здесь груз 7 натягивает шнур 12, прикрепленный к датчику силы 10, установленном на свободном конце солнечной батареи 1. Шнур 12 проходит через шкив 8, установленный на кронштейне 4, который в свою очередь закреплен на подставке 5. Чтобы не возбуждать паразитных колебаний солнечной батареи 1 силу наращивают плавно. Это можно сделать, например, плавно опуская руками груз 7, пока сила натяжения шнура 12 не станет равной весу груза 7. После того, как сила была приложена, необходимо выдержать некоторое время для формирования частотного спектра прилагаемой силы с требуемой точностью и резко сбросить силу, перерезав шнур 12 на участке разрыва 9. Груз 7 падает на амортизатор 6, который нужен для того, чтобы не повредить пол. После этого солнечная батарея 1 начнет совершать затухающие колебания. Датчики колебаний 11 регистрируют соответствующие сигналы.
При измерениях колебаний может учитываться любой параметр движения - перемещение, скорость или ускорение (см. Брюль и Къер. Испытания конструкций, ч. 1 Измерения механической подвижности. Январь 1989 г., стр. 31). В качестве датчика колебаний 11 можно использовать любой из перечисленных классов, имеющий подходящий частотный диапазон и чувствительность. Например, использовать емкостной акселерометр типа 3701 фирмы РСВ, США, так как он обладает следующими преимуществами:
• частотный диапазон от 0 до 100 Гц;
• сравнительно малая собственная масса (17,5 г);
• высокая чувствительность (1000 мв/g);
• малая поперечная чувствительность;
• возможность применения простых методов крепления.
Скорость и перемещение могут быть получены путем интегрирования, пропорционального ускорению сигнала, с помощью снабженного интеграторами усилителя-формирователя сигнала датчика, например преобразователь виброскорости AV 02-01 фирмы Zetlab, Россия или с помощью устройств для последующей обработки данных, имеющихся в анализаторе.
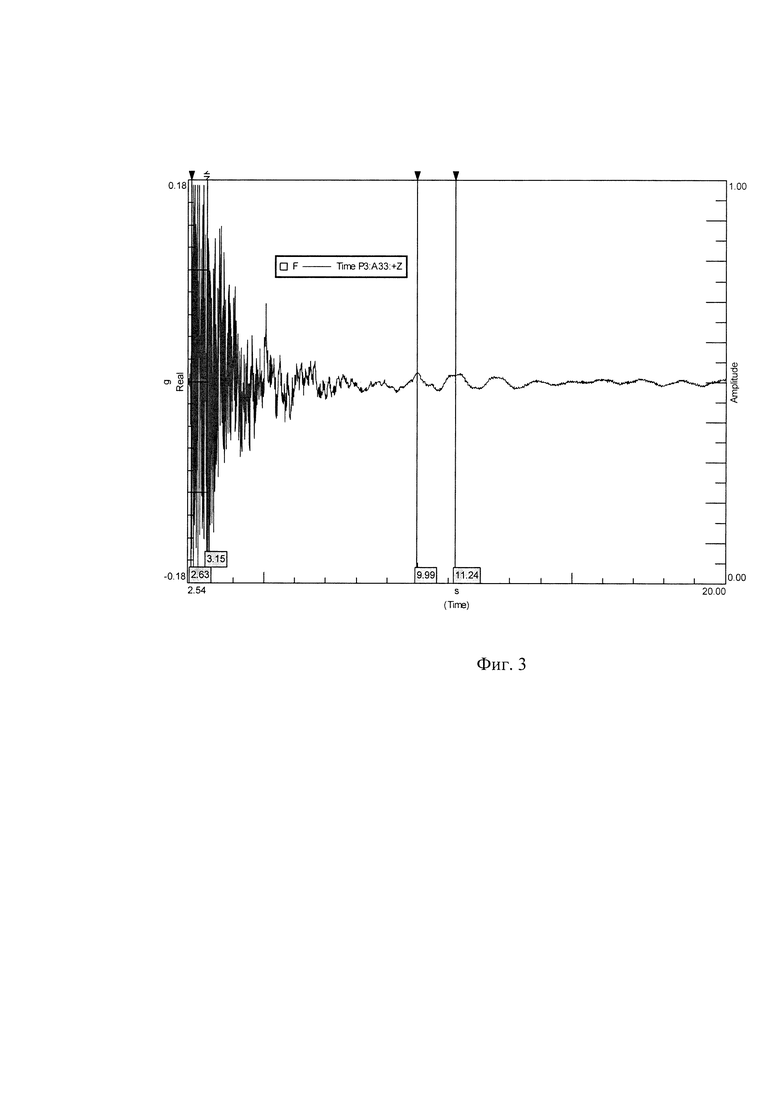
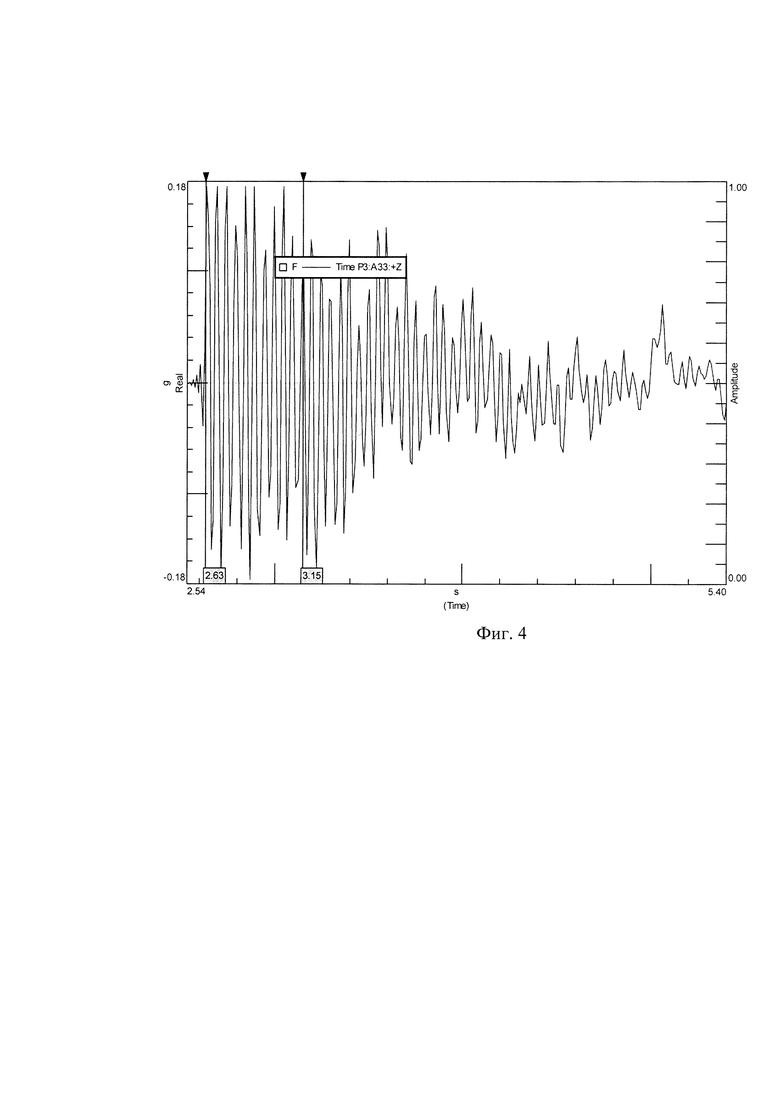
На фиг. 3 представлена запись колебаний солнечной батареи 1 длиной около 10 м. В качестве параметра колебаний использовалось виброускорение точки на свободном конце солнечной батареи 1. Видно, что в начале солнечная батарея 1 совершает высокочастотные колебания, которые через некоторое время затухают и остаются колебания с низкой частотой с меньшим по времени затуханием. Эту частоту можно с приемлемой точностью определить по графику (фиг. 3) по расстоянию между двумя соседними пиками колебаний. Для определения высокочастотных колебаний необходимо растянуть процесс по времени в начале колебаний, как это сделано на фиг. 4. Визуально по зарегистрированному процессу можно уверенно выделить две частоты собственных колебаний. Но на самом деле их значительно больше. Для того, чтобы в этом убедиться необходимо определить частотную характеристику податливости Н(со) (ускорение/сила). Она представляет собой отношение выходного и входного спектров и изменяется в зависимости от круговой частоты со. Как известно, частотная характеристика податливости дает полную информацию о динамических характеристиках конструкции изделия в частотном диапазоне, в котором она определена. Но для ее получения необходимо знать как выходной спектр колебаний, так и входной спектр действующей силы (см. Брюль и Къер. Испытания конструкций, ч. 1 Измерения механической подвижности. Январь 1989 г., стр. 9).
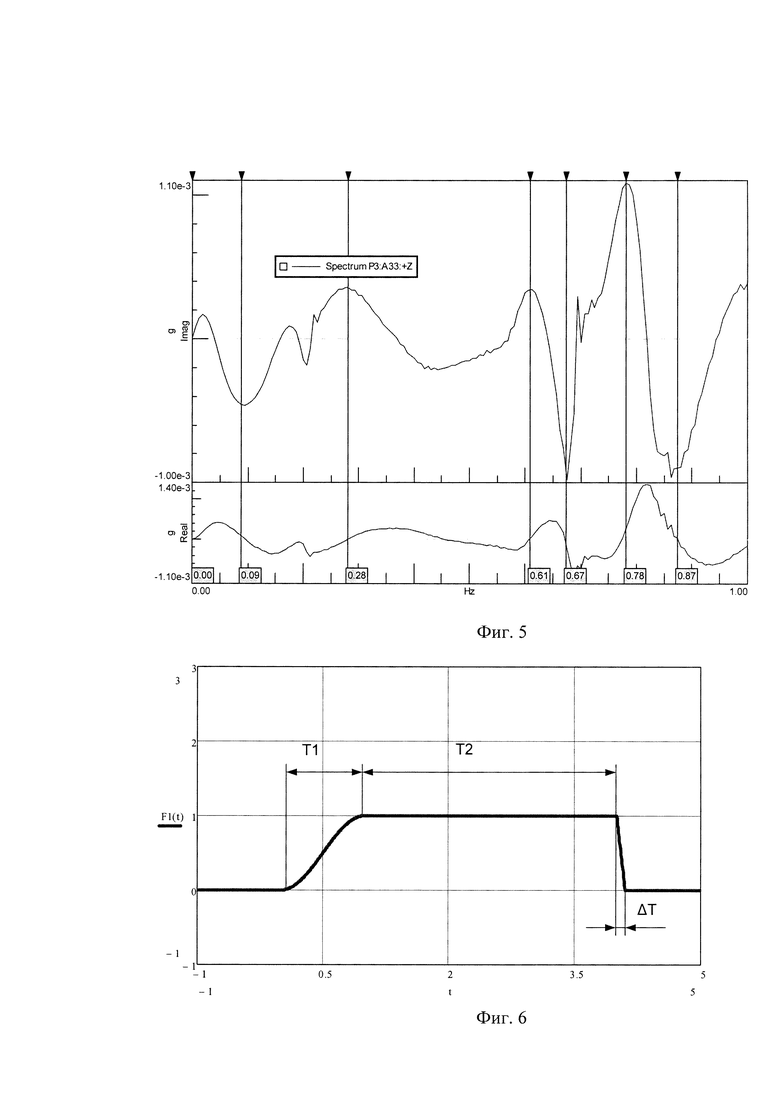
Выходной спектр колебаний можно получить путем преобразования временных сигналов от датчиков колебаний 11 при помощи анализатора спектра, например анализатора A17-U8 фирмы ZETLAB. На фиг. 6 показан комплексный частотный спектр процесса, представленного на фиг. 3 в формате «мнимая и действительная части». Если входной спектр приложенной силы гладкий и не имеет изменений фазы, то собственным частотам конструкции изделия будут соответствовать максимумы амплитуды мнимой части и минимумы амплитуды действительной части выходного спектра. На фиг. 6 эти частоты отмечены курсором. Их шесть, а по временному процессу на фиг. 3 можно выделить только две. Частота на фиг. 6 является циклической и связана с круговой частотой ω соотношением ω=2⋅π⋅f.
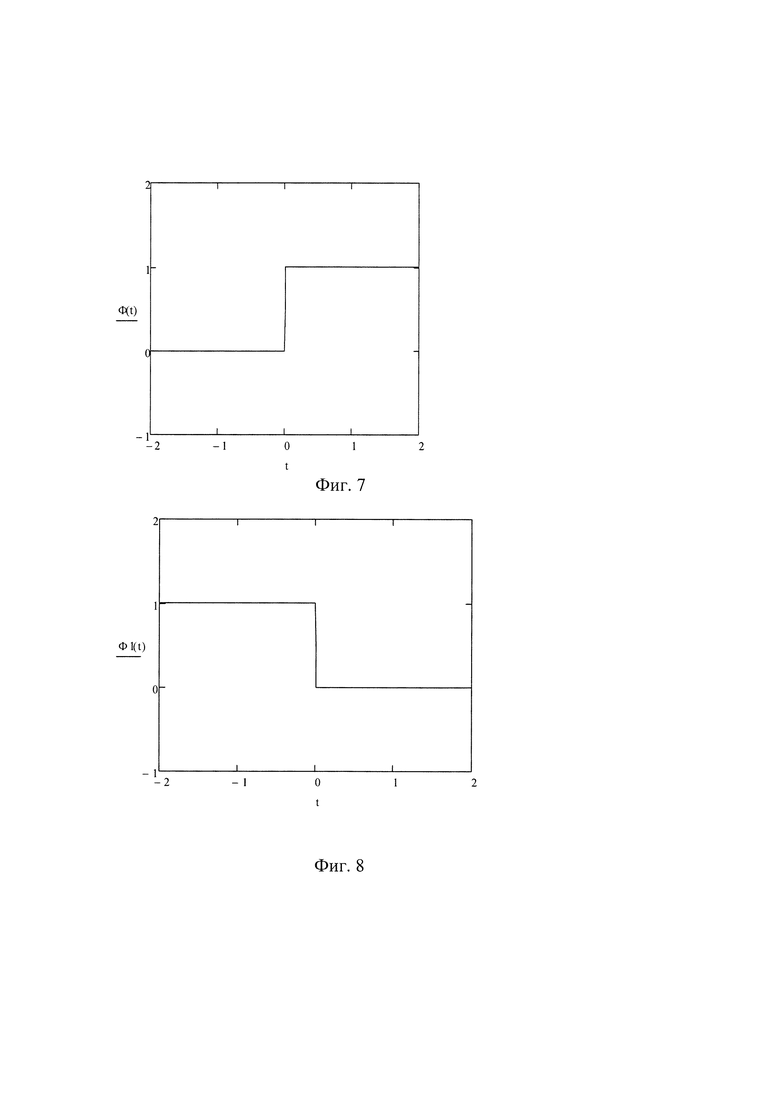
Спектр силы входного процесса можно получить, сделав преобразование Фурье временного сигнала действующей на объект испытаний силы. На фиг. 7 представлена типичная зависимость действующей (растягивающей) силы F1(t) в методе свободных колебаний. Здесь Т1 - длительность процесса наращивания приложенной силы, Т2 - длительность выдержки постоянного значения силы, ΔT - длительность процесса сброса силы. При T1, Т2→∞ и ΔТ→0 график зависимости силы от времени приобретает вид «ступеньки».
Возьмем для определенности величину ступеньки, равной единице силы, и аналитически определим спектральную плотность такой функции. Выбирая достаточно большими значения Т1 и Т2 можно формировать спектр приложенной силы как угодно близким к теоретическому спектру ступеньки. Для каждого значения величины ступеньки прилагаемой силы можно получить частотный спектр, умножая теоретический спектр единичной ступеньки на значение силы. Причем, вид этого спектра совершенно не зависит от свойств конструкции испытуемого объекта, а определяется только формой временной зависимости прилагаемой силы. Это означает, что не обязательно регистрировать временной сигнал от прилагаемой силы для определения спектра, достаточно знать амплитуду приложенного усилия. Определить величину прилагаемого усилия можно как при помощи простого пружинного динамометра, например, стрелочного динамометра типа МЕГЕОН 04050, так и по весу груза 7 при использовании устройства на фиг. 2. Поскольку входной спектр приложенной силы можно сформировать как угодно близким к теоретическому в заданном диапазоне частот регулируя величины Т1 и Т2, то частотную характеристику податливости можно определить поделив выходной спектр записанных колебаний на теоретический входной спектр. А уже по частотной характеристике податливости определить все динамические характеристики в исследуемом диапазоне частот (коэффициенты затухания собственных колебаний, формы и частоты собственных колебаний, модальные массы). В предположении линейности динамических характеристик механической системы, которой является объект испытаний, частотную характеристику податливости, используя различные математические алгоритмы, представляют в виде суммы частотных характеристик гармонических осцилляторов (см. Брюль и Къер. Испытания конструкций, ч. 2 Измерения механической подвижности. Январь 1989 г., стр. 4-5). Каждый из этих осцилляторов соответствует тону собственных колебаний объекта испытаний, а по его частотной характеристике определяют все динамические параметры этого тона.
Интересно оценить количественно отличия частотного спектра реальной приложенной силы, представленной на фиг. 7, от спектра идеальной «ступеньки». Спектр временного сигнала дается интегральным преобразованием Фурье типа:
«Ступеньку» можно задать формулой
где Ф(t) - функция Хевисайда.
Графики Ф(t) и Ф1(t) представлены на фиг. 8.
Используя известные свойства преобразования Фурье (таблица 1), можно найти спектр идеальной «ступеньки» функции Ф1(t).
Здесь δ(ω) - дельта - функция Дирака.
Поскольку интерес представляют собой частоты, отличные от нуля, то амплитуда спектра «ступеньки» равна:
Можно оценить, насколько отличается спектр реального силового воздействия  от спектра
от спектра  идеальной «ступеньки». Реальный процесс силового воздействия можно аппроксимировать функцией, представленной на фиг. 7. Здесь присутствуют три временных участка. На первом участке длительностью Т1 происходит плавное нагружение конструкции усилием, изменяющимся по закону:
идеальной «ступеньки». Реальный процесс силового воздействия можно аппроксимировать функцией, представленной на фиг. 7. Здесь присутствуют три временных участка. На первом участке длительностью Т1 происходит плавное нагружение конструкции усилием, изменяющимся по закону:

На втором участке длительностью Т2 усилие поддерживается постоянным для формирования спектра силы и изменяется по закону:

Для поддержания усилия постоянным достаточно зафиксировать деформацию испытуемой конструкции. Поскольку объект протяженный и гибкий, это сделать легко.
Третий участок длительностью ΔT - это участок резкого освобождения от действия силы. Сила здесь сбрасывается по линейному закону:

В системе Matcad была определена амплитуда Аехр(ω) спектра функции F1(t). Далее была построена функция z(ω), являющаяся разностью амплитуд спектров функций F1(t) и Ф1(t) в процентах.

График этой функции для значений Т1=Т2=600 с и ΔТ=0,1 с представлен на фиг. 9. Реальные значения ΔТ обычно значительно меньше 0,1 с. На фиг. 10 представлен график изменения приложенной силы при разрезании шнура ножницами во время испытаний солнечной батареи с резонансной частотой первого тона fr≈0.1 Гц и, соответственно, круговой частотой ωr≈0.628 Рад/с. Здесь время сброса силы ΔT~0,03 с. В окрестности резонансной частоты разница спектров менее 1%. Влияние ΔT можно увидеть на графике фиг. 11 для Т1=Т2=600 с и ΔТ=0,7 с. Здесь разница возрастает до 2% при ω=1.
На фиг. 12 представлены значения z(ω) для Т1=Т2=100 с и ΔТ=0,1 с. Видно, что в окрестности резонансной частоты разница возросла в несколько раз.
На фиг. 13 представлены значения z(ω) для Т1=600, Т2=10 с и ΔТ=0,1 с. График почти такой же, как и на фиг. 7. Видно, что влияние времени Т2 гораздо меньше влияния времени Т1, самое большое значение имеет плавность приложения силы и требуется довольно продолжительное время для формирования спектра силы с приемлемым от идеального спектра отличием. Время это порядка сотни секунд.
Тем не менее, всегда возможно подобрать Т1 и Т2 такими, чтобы обеспечить приемлемую близость реального спектра прилагаемого усилия к идеальному в заданном диапазоне низких частот. В отдельных случаях это упрощает проведение испытаний, поскольку не обязательно регистрировать изменение силы по времени и вычислять ее спектр для получения частотной характеристики податливости конструкции, поскольку заранее известно, что спектр воздействующей силы будет близок к теоретическому с заданной точностью.
Вышеизложенное позволяет утверждать, что заявленный технический результат достигается. Заявленное решение можно использовать не только для солнечных батарей, но и для других протяженных объектов, например, выносных антенн. Следует отметить, однако, что заявленный способ будет иметь преимущество только для низких частот (менее 0,5 Гц) и больших амплитуд колебаний, где не работают электродинамические вибраторы.
В известных случаях модальных испытаний протяженные объекты (солнечные батареи) испытывались в горизонтальном положении в обезвешенном состоянии, как в вышеупомянутой диссертации Пугача Ю.Н., стр. 47 (другие способы испытаний считались невозможными). В этом случае улучшается доступ к поверхности батареи для обслуживания средств измерения, но возникает необходимость в системе обезвешивания для предотвращения деформации и поломки батареи под собственным весом. Возникает также проблема учета влияния системы обезвешивания на динамические характеристики изделия. Кроме того, из-за наличия системы обезвешивания хорошо определяются характеристики собственных колебаний только для тех собственных частот (тонов), чьи формы колебаний лежат в горизонтальной плоскости.
Для устранения влияния системы обезвешивания изделие в заявленном способе устанавливают на оснастке с ответным устройством крепления в вертикальном положении подвешенным вниз. В этом случае в конструкции изделия не возникает под действием сил гравитации значительных изгибных моментов сил, способных существенно изменить форму изделия или его разрушить.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вибрационного контроля зазоров в конструкциях изделий | 2023 |
|
RU2830992C1 |
| Способ определения обобщенных параметров колебаний конструкций по частотным характеристикам | 2020 |
|
RU2758152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ В ИЗДЕЛИЯХ ИЗ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 2022 |
|
RU2792600C1 |
| Способ испытаний систем и приборов космического назначения в условиях имитации невесомости | 2023 |
|
RU2823384C1 |
| Способ определения парциальных частот управляемой поверхности летательного аппарата и устройство для его осуществления | 2019 |
|
RU2715369C1 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| Способ оценки влияния воздушной среды на демпфирование колебаний конструкций | 2019 |
|
RU2737031C1 |
| Способ определения параметров собственных тонов колебаний конструкций в резонансных испытаниях | 2017 |
|
RU2658125C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2568959C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ХОДОВЫХ КАЧЕСТВ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2537354C2 |
Изобретение относится к области испытаний на стойкость к механическим внешним воздействующим факторам машин, приборов и других технических изделий и может быть использовано в машиностроении, ракетно-космической, авиационной и в других отраслях техники. Способ заключается в том, что гибкую протяженную конструкцию с установленными на ней датчиками колебаний закрепляют на жестком основании способом, предусмотренным для эксплуатации упомянутой конструкции. Затем к ней прилагают растягивающую силу в направлении, где ожидается наибольшая амплитуда колебаний, затем резко освобождают конструкцию от действия растягивающей силы, регистрируют свободные и затухающие колебания. Растягивающую силу прикладывают к свободному концу конструкции с установленным на нем датчиком силы, наиболее удаленному от места крепления, в пучностях ожидаемых собственных форм колебаний, перед освобождением конструкции от действия силы приложенную силу плавно увеличивают до требуемого значения и выдерживают необходимое время, тем самым формируют входной спектр действующей силы в заданном частотном диапазоне, полученный путем преобразования временных сигналов от датчика силы, формируют выходной спектр колебаний, полученный путем преобразования временных сигналов от датчиков колебаний. Затем по соотношению полученных выходных и входного спектров зарегистрированных временных сигналов определяют частотную характеристику податливости, по которой судят о динамических характеристиках гибкой протяженной конструкции. Технический результат заключается в возможности определения коэффициентов затухания собственных колебаний, формы и частоты собственных колебаний, модальных масс и модальных податливостей для протяженных изделий, а также обеспечение нормирования частотного спектра силового возбуждения и повышения достоверности результатов испытаний. 1 з.п. ф-лы, 13 ил. 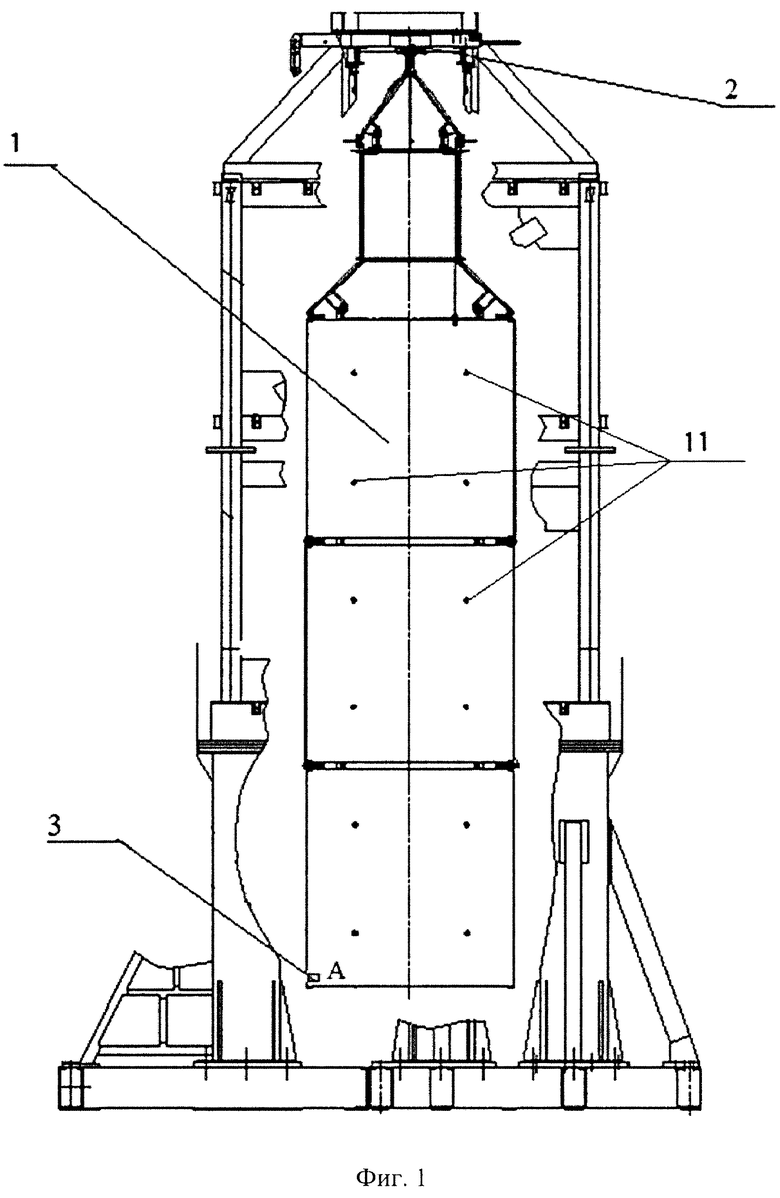
1. Способ экспериментального определения динамических характеристик гибких протяженных конструкций, заключающийся в том, что упомянутую конструкцию с установленными на ней датчиками колебаний закрепляют на жестком основании способом, предусмотренным для эксплуатации упомянутой конструкции, к которой прилагают растягивающую силу в направлении, где ожидается наибольшая амплитуда колебаний, затем резко освобождают конструкцию от действия растягивающей силы, регистрируют свободные и затухающие колебания, отличающийся тем, что растягивающую силу прикладывают к свободному концу конструкции с установленным на нем датчиком силы, наиболее удаленному от места крепления, в пучностях ожидаемых собственных форм колебаний, перед освобождением конструкции от действия силы приложенную силу плавно увеличивают до требуемого значения и выдерживают необходимое время, тем самым формируют входной спектр действующей силы в заданном частотном диапазоне, полученный путем преобразования временных сигналов от датчика силы, формируют выходной спектр колебаний, полученный путем преобразования временных сигналов от датчиков колебаний, а затем по соотношению полученных выходных и входного спектров зарегистрированных временных сигналов определяют частотную характеристику податливости, по которой судят о динамических характеристиках гибкой протяженной конструкции.
2. Способ по п. 1, отличающийся тем, что гибкую протяженную конструкцию закрепляют на основании вертикально вниз.
| Грейфер | 1932 |
|
SU30630A1 |
| Пугач Игорь Юрьевич | |||
| Разработка методического обеспечения повышения точности моделирования динамических характеристик элементов конструкций КА ДЗЗ на стадии проектирования и наземной | |||

