Настоящее изобретение относится к тренировочным устройствам для развития и укрепления мускулатуры или суставов упражнениями по преодолению противодействующего усилия с измерительными приборами или без них; а также к системам моделирования движения человека в виртуальной реальности.
Из уровня техники известна заявка на патент компании Google, который выполнен на основе роботизированных башмаков и включает вычислители и периферийные устройства связи и позиционирования пользователя для минимизации требуемого пространства для перемещения в виртуальных мирах (RU 20180326286 от 15.11.2018 г.).
Также известна беговая дорожка по патенту KR100483857B1, подключенная к системе виртуальной реальности, данный патент выбран в качестве прототипа и для устройства и для способа.
Недостатками известных технических решений являются ограниченная скорость движения пользователя, а также невозможность учитывать изменение рельефа виртуального пространства и соответственно переноса кривизны рельефа для изменения нагрузки на мышцы пользователя. Кроме того, отсутствует система коррекции положения пользователя в процессе тренировки.
Задачей, на решение которой направлено заявляемое изобретение является создание бегового тренажера с интегрированным в его контур управления комплексом визуализации виртуальной реальности, перемещение пользователя по которой может осуществляться, не ограничиваясь габаритами помещения, в котором установлен тренажер.
Техническим результатом для устройства и способа является возможность моделирования процесса более эффективных тренировок на беговом тренажере за счет создания трасс любой сложности и протяженности, обеспечивая при этом эффект полного погружения пользователя в виртуальный мир в условиях ограниченного пространства имеющегося помещения для проведения тренировок.
Технический результат достигается за счёт того, что беговой тренажёр с системой виртуальной реальности, содержащий беговую дорожку, вычислительное устройство, обеспечивающее визуализацию виртуальной реальности, систему управления и отличается тем, что беговая дорожка имеет по меньшей мере две степени свободы, включает привод вертикального канала и привод канала крена, беговая дорожка выполнена с возможностью изменения наклона как в продольном, так и в поперечном направлении в зависимости от особенностей рельефа виртуальной реальности, за счёт того, что управляющие сигналы подают напряжение на переднюю или заднюю пару толкающих приводов вертикального канала, если рельеф в виртуальной модели изменяется по перепаду высот, при этом усилия на приводах вызывают поворот опорных рычагов, за счет чего внешняя силовая рама поднимает переднюю или заднюю свою часть, а также управляющие сигналы включают силовые реле в контуре крена и напряжение подается одновременно, но с обратной полярностью на правый и левый приводы канала крена, что приводит к вращению внутренней подвижной рамы, если в виртуальной модели рельеф меняется по кривизне поверхности в поперечном направлении.
Также технический результат достигается в способе имитации перемещения в виртуальной реальности в процессе занятий на беговом тренажёре, где выбирают один из заданных режимов движения и виртуальную модель; после запуска выполнения виртуальной модели, отслеживают положение пользователя, находящегося изначально в центральной части полотна беговой дорожки; в процессе реализации виртуальной модели изменяют угол наклона силовой рамы тренажёра в продольном и поперечном направлениях в соответствии с изменением рельефа трассы виртуальной модели; при этом непрерывно отслеживают местоположение пользователя в заданной терминальной зоне в центре тренажёра и в случае смещения пользователя за пределы этой зоны изменяют углы наклона силовой рамы и вращают подвижную раму, а также, при необходимости изменяют скорость движения полотна таким образом, что, согласовываясь с виртуальной моделью, приводят пользователя в заданную терминальную зону; после проведения коррекции система управления возвращает положение полотна дорожки в соответствие с рельефом виртуальной модели.
Заявляемое изобретение представляет собой комплекс, состоящий из бегового тренажера оригинальной конструкции, адаптированной под решаемую задачу и имеющий, как-минимум, две степени свободы; аппаратно-программного оснащения, реализующего функции позиционирования пользователя за счет управления как движением бегового полотна дорожки, так наклонами беговой дорожки в зависимости от особенностей рельефа виртуальной поверхности. Система позиционирования может быть построена на основе использования различных сенсоров и каналов обратной связи. Считывание рельефа из виртуальной модели построено на основе вычислительного устройства, генерирующего массивы данных из поля высот подстилающей поверхности, которая может быть построена, например, на основе данных фотограмметрии, и обеспечивающей визуализацию трехмерной модели мира, например, через очки виртуальной реальности.
Данная задача решается за счет того, что заявленное изобретение позволяет перемещать подстилающую поверхность, связанную с трехмерной виртуальной трассой, навстречу движения пользователя, учитывая его пространственное положение и ориентацию относительно центра беговой дорожки. Принудительное искусственное смещение пользователя используется для того, чтобы исключить контакт пользователя с механическими элементами, определяющими физические границы тренажера.
Сущность изобретения поясняется чертежами:
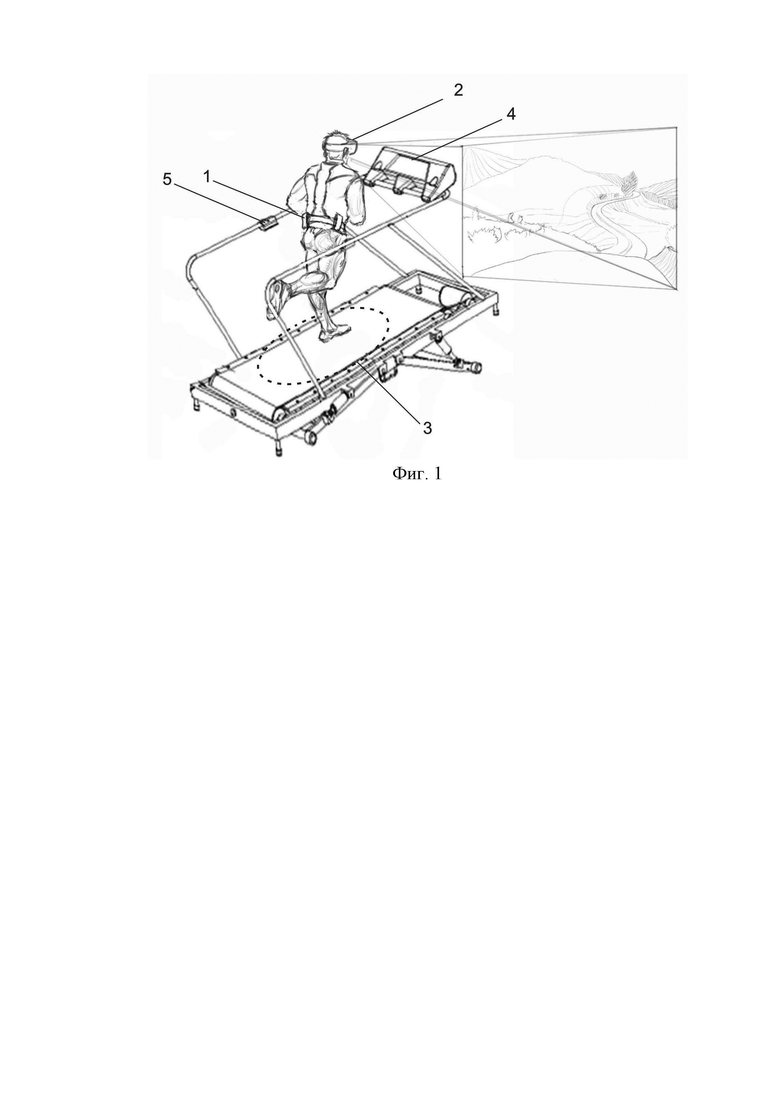
фиг. 1 – расположение пользователя на беговом тренажере;
фиг. 2 – модель виртуального мира;
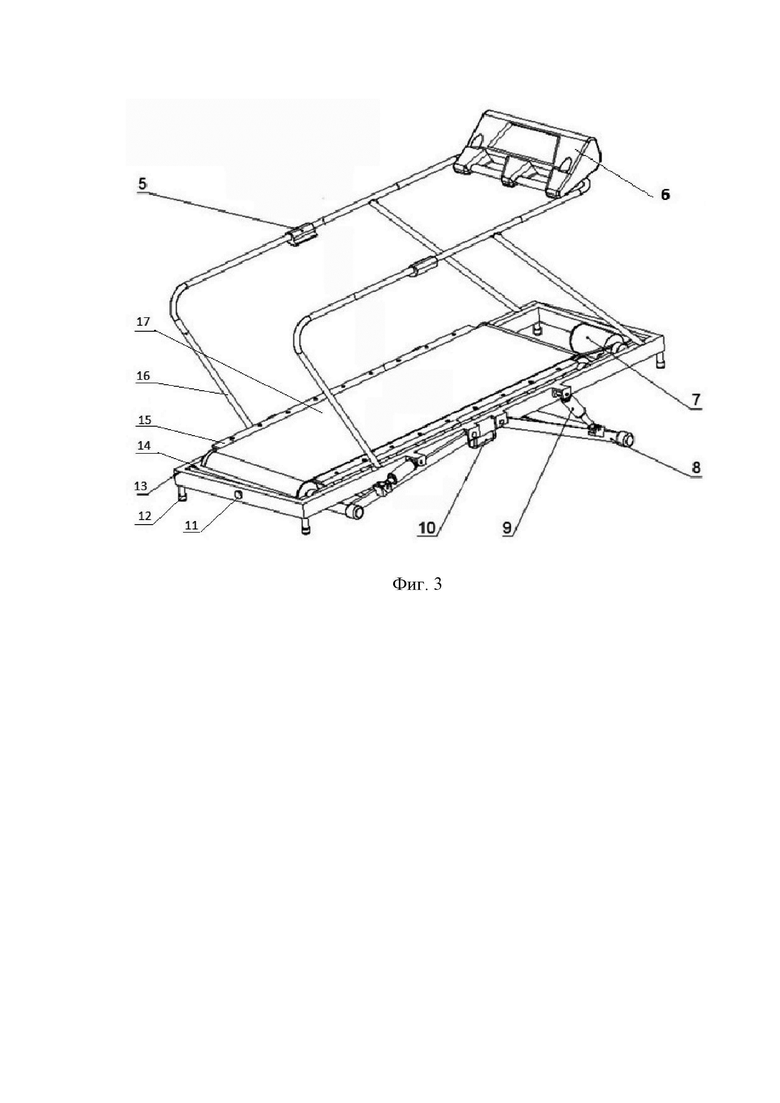
фиг. 3 – конструкция бегового тренажера;
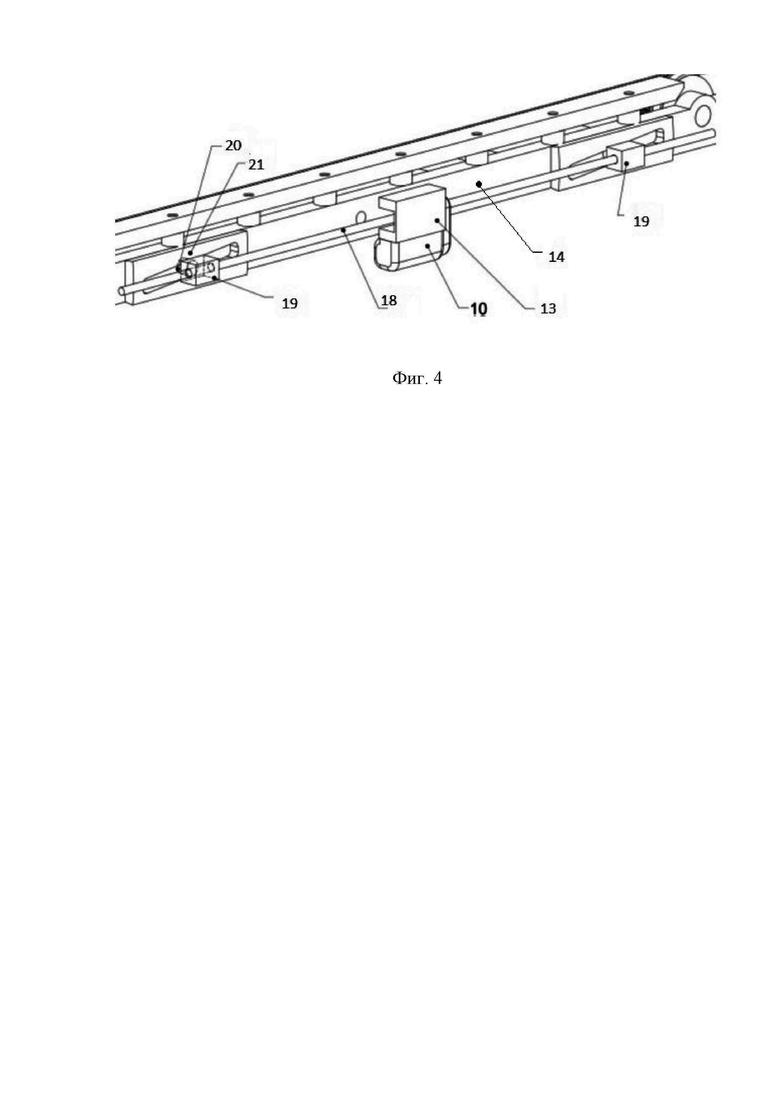
фиг. 4 – узел приводов канала крена;
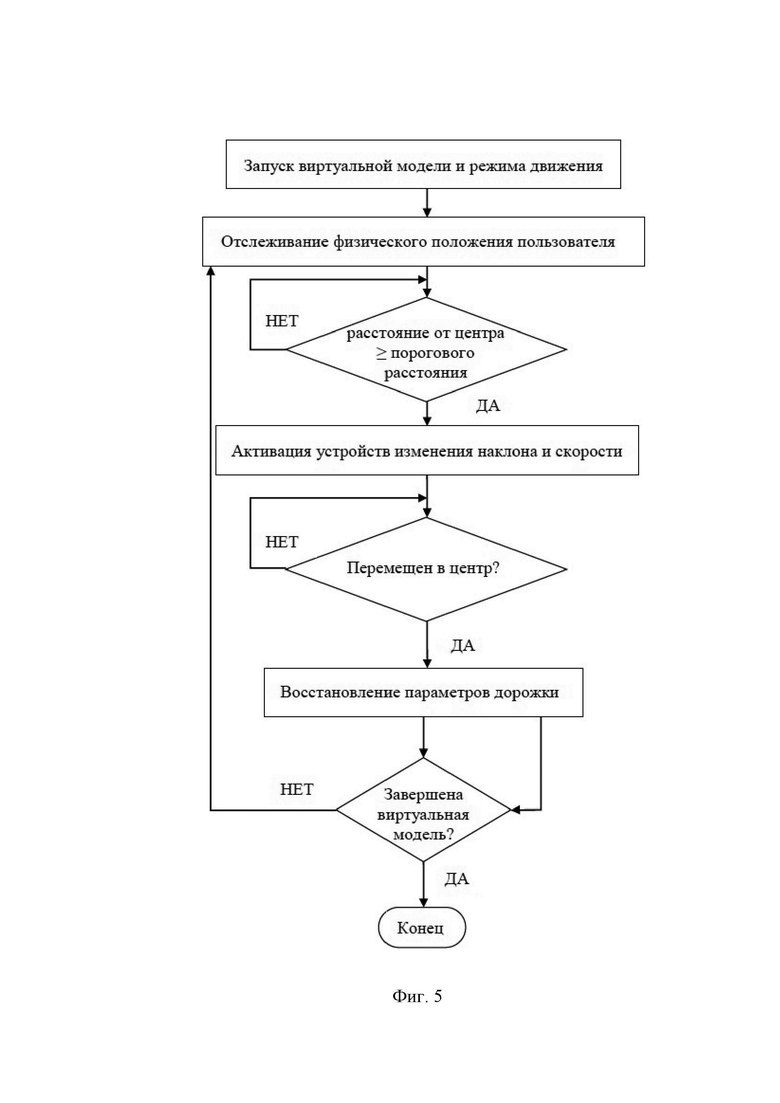
фиг. 5 – логическая схема работы системы позиционирования;
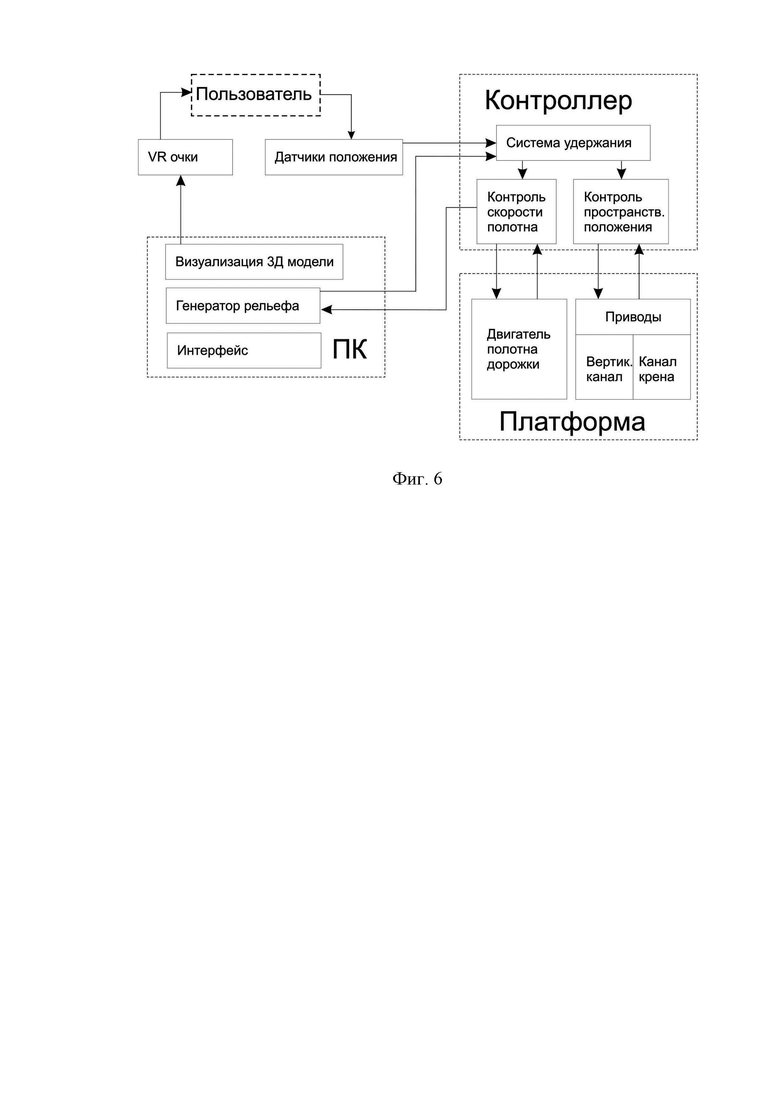
фиг. 6 – функциональная схема системы управления тренажером.
Устройство беговой дорожки показано на фиг. 3 и представляет собой силовую раму 13, которая в исходном состоянии опирается на пол тренажерного зала с помощью четырех ножек 12, имеющих шарнирные пятки с резиновой подошвой. К боковым (длинным) профилям рамы 13 крепятся поручни 16, с размещенными на них сенсорами положения пользователя 5, а на передней части поручней установлен дисплей управления 6.
На внешних сторонах боковых профилей рамы 13 имеются узлы крепления приводов вертикального канала 9 и корпуса приводов канала крена 10. Также в центральной части боковых профилей имеются проушины для монтажа подвижных опор 8, на нижних частях которых имеются опорные ролики.
На переднем и заднем (коротких) профилях рамы 13 имеются опорные подшипники для установки цапф 11, через которые к силовой раме 13 закреплена подвижная рама 14. На подвижной раме также размещен тяговый двигатель 7, который через зубчатый ремень приводит в движение ведущий валик, двигающий полотно беговой дорожки 17. Для восприятия нагрузок со стороны пользователя к верхней части подвижной рамы 14 крепится подстилающий лист высокопрочной шлифованной фанеры 15, по которой скользит полотно 17.
Во внутренних полостях боковых профилей рамы 13, которые имеют П-образное поперечное сечение, располагаются механизмы управления движением подвижной рамы 14. Правый механизм показан на фиг.4. В его состав входит привод канала крена 10, состоящий из двигателя и червячного редуктора. Выходное звено редуктора через цилиндрическую шестерню связано с валом 18, входящим в состав шарико-винтовой передачи, продольно перемещаемые элементы которой выполнены в виде двух ползунов 19. Направляющими для ползунов являются внутренние поверхности П-образных профилей силовой рамы 13. На своих торцах оба ползуна имеют цапфы с надетыми на них катками 20. Катки 20 перемещаются по профильным позам копиров 21, которые жестко закреплены на боковой поверхности подвижной рамы 14. Такие механизмы расположены по обеим сторонам тренажера, что повышает жесткость всей конструкции.
Комплекс работает следующим образом.
В соответствии с логикой, обозначенной на фиг. 5, пользователь, находясь на полотне беговой дорожки, выбирает нужную трассу и режим движения, используя функции интерфейса на сенсорном дисплее. Далее, как показано на фиг. 1. пользователь встает в центр терминальной зоны 3 беговой дорожки, одевает индикаторный пояс 1 и очки виртуальной реальности 2. Далее пользователь с помощью команд интерфейса на индикаторе 4 сенсорного дисплея 6 активирует систему активного позиционирования, которая с помощью сенсоров 5 начинает процесс отслеживания положения пользователя в центральной части полотна внутри терминальной зоны 3 беговой дорожки.
Через голосовой интерфейс, встроенный в блок управления тренажером, пользователь запускает на выполнение виртуальную модель выбранной трассы и получает в очки виртуальной реальности требуемое трехмерное изображение как показано на фиг. 1.
Имеющиеся в памяти блока управления или загружаемые самостоятельно пользователем модели виртуального мира для повышения реалистичности и усиления эффекта от тренировок (за счет изменения нагрузок на мышцы ног при движении вверх по склону) могут иметь маршруты с изменяемым рельефом местности. Данное изменение рельефа в виде двух массивов данных: по перепаду высот от уровня моря (наклон трассы в продольном направлении) и по кривизне поверхности (наклону трассы в поперечном направлении) будут динамически считываться. Эти цифровые данные как дискретные параметры в каждый момент времени будут формировать рабочие команды для основного контроллера механической части тренажера по двум соответствующим каналам: вертикальному каналу и каналу крена.
В процессе реализации виртуальной модели рабочие команды, преобразованные в основном контроллере в управляющие сигналы, будут поступать на силовые реле в контуре приводов механической части тренажера, показанной на фиг. 3. Управляющие сигналы, открывая реле, будут подавать напряжение на переднюю или заднюю пару толкающих приводов (линейных актуаторов) вертикального канала 9, если рельеф в виртуальной модели изменяется по перепаду высот. Усилия на приводах 9 будут вызывать поворот опорных рычагов 8. За счет этих усилий внешняя силовая рама 11 (или весь тренажер в целом) будет поднимать переднюю или заднюю свою часть на максимальный угол относительно поверхности пола ±15º, что будет соответствовать максимально возможному уклону наклона виртуальной трассы в продольном направлении.
Если в виртуальной модели рельеф меняется по кривизне поверхности (в боковом направлении на фиг.2), то управляющие сигналы будут включать силовые реле в контуре крена и напряжение будет подаваться одновременно, но с обратной полярностью на правый и левый приводы канала крена 10, которые также, как и приводы вертикального канала, закреплены на внешней силовой раме 13 тренажера. Эти приводы представляют собой тяговый двигатель с редуктором, выходной вал которого выполнен в виде винта большого удлинения 18 на фиг. 4. На выходной вал (на края его резьбового участка) надеты пара ползунов 19, имеющих внутренне отверстие с резьбой и на боковой поверхности каждого ползуна имеется вал с катком в виде игольчатого подшипника 20. При вращении выходного вала ползуны 19 будут перемещаться вдоль собственных направляющих внутри внешней рамы 13, а их катки будут обкатываться по профильным пазам соответствующих им копиров 21, которые жестко закреплены на боковой поверхности внутренней подвижной рамы тренажера. За счет перемещения ползунов будет реализовано вращение внутренней подвижной рамы тренажера на фиг. 3 на максимальные углы по крену ±3º вокруг цапфы 11. Это вращение будет соответствовать максимально возможному изменению кривизны виртуальной трассы в боковом направлении.
Таким образом, двунаправленное изменение виртуального рельефа будет приводить к фактическому изменению пространственного положения беговой дорожки относительно пола тренажерного зала. За счет этого будет обеспечено полное соответствие реальным изменениям нагрузок на мышцы тренируемого при проведении тренировок на сложном рельефе.
Причем, в отличие от существующих сегодня тренажеров с изменяемым положением беговой дорожки, а это тренажеры, которые позволяют изменять положение дорожки только в продольном направлении и только на положительный угол, предлагаемое решение обеспечивает изменение положения беговой дорожки в двух плоскостях на положительные и отрицательные углы.
Для исключения смещения пользователя в процессе тренировки за пределы терминальной зоны беговой дорожки 3 фиг. 1, вызванного воздействием эффекта погружения в виртуальную реальность, т.е. отсутствия у пользователя визуального восприятия физического пространства и с целью компенсации подвижности беговой поверхности в двух плоскостях, на тренажере предусмотрена активная система позиционирования пользователя. Ее работа заключается в постоянном мониторинге факта нахождения пользователя в заданной терминальной зоне в центре тренажера. Алгоритм работы системы позиционирования описан на принципиальной схеме фиг. 5.
В случае смещения пользователя за пределы терминальной зоны, на сенсорах 5 на фиг. 1 при их активном взаимодействии с маркерами на сенсорном поясе 1 формируются сигналы рассогласования, которые в качестве управляющих поступают на систему удержания, показанную на фиг. 6 в основном контроллере. Эти сигналы суммируются с рабочими командами, поступающими на контроллер из генератора рельефа и формируют управляющие сигналы на приводы вертикального канала и канала крена, заставляя их изменять углы наклона беговой дорожки. Фактическое пространственное положение беговой дорожки в виде сигналов обратной связи также передается на контроллер.
В случае недостаточности коррекции за счет изменения углов наклона беговой дорожки предусмотрена коррекция скорости движения бегового полотна путем ввода аналогичных корректирующих сигналов на тяговый двигатель, заставляя его вращаться быстрее или медленнее в зависимости от смещения пользователя назад или вперед относительно центра тренажера соответственно.
Все указанные корректирующие сигналы, согласовываясь с рельефом трехмерной моделью, но действуя зачастую в обратном направлении, должны искусственно переместить пользователя в заданную терминальную зону в случае выхода из нее.
После проведения коррекции, то есть возврата пользователя в центр терминальной зоны, сигналы с блока коррекции должны принять нулевые значения, а рабочие команды, поступающие на контроллер, должны будут снова обеспечить полное соответствие пространственного положения беговой дорожки рельефу виртуальной модели до следующего покидания пользователя терминальной зоны.
В ходе выполнения тренировки, если пользователь понимает, что он явно опережает или не успевает за скоростью движения беговой дорожки, для бесконтактного управления дорожкой также предусмотрена идентификация типового набора голосовых команд управления как минимум скоростью движения дорожки через специальный голосовой интерфейс.
После выполнения виртуальной модели беговая дорожка должна постепенно остановиться, обеспечивая постоянное нахождение пользователя в центре терминальной зоны.
В случае необходимости за передней и задней границами бегового полотна возможно размещение убирающихся шторок, которые будут выдвигаться сразу после запуска бегового дорожки и, работая вместе с поручнями будут способны исключить падение пользователя за пределы полотна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| СПОСОБ ИМИТАЦИИ УЧАСТИЯ СПОРТСМЕНА БИАТЛОНИСТА ИЛИ ЛЫЖНИКА В СОРЕВНОВАНИЯХ ЛЮБОГО УРОВНЯ, В ТРЕНИРОВКАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2689445C1 |
| Всенаправленная дорожка для виртуальной реальности | 2022 |
|
RU2784682C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| ТРЕНАЖЕР ОПЕРАТИВНОГО И ЭКСПЛУАТАЦИОННОГО ПЕРСОНАЛА НА ОСНОВЕ МОДЕЛЕЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ТРАНСФОРМАТОРНОЙ ПОДСТАНЦИИ | 2016 |
|
RU2617972C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И СОРЕВНОВАНИЙ, ПРЕИМУЩЕСТВЕННО В СПОРТИВНЫХ ЛОКОМОЦИЯХ И ИГРАХ | 1999 |
|
RU2149667C1 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| Устройство для тренировки бега по пересеченной местности | 2021 |
|
RU2775444C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
Настоящая группа изобретений относится к тренировочным устройствам для развития и укрепления мускулатуры или суставов упражнениями по преодолению противодействующего усилия с измерительными приборами или без них; а также к системам моделирования движения человека в виртуальной реальности. Заявляемое изобретение представляет собой комплекс, состоящий из бегового тренажера оригинальной конструкции, адаптированной под решаемую задачу и имеющей как минимум две степени свободы; аппаратно-программного оснащения, реализующего функции позиционирования пользователя за счет управления как движением бегового полотна дорожки, так наклонами беговой дорожки в зависимости от особенностей рельефа виртуальной подстилающей поверхности. Система позиционирования может быть построена на основе использования различных сенсоров и каналов обратной связи. Считывание рельефа из виртуальной модели построено на основе вычислительного устройства, генерирующего массивы данных из поля высот подстилающей поверхности, которая может быть построена, например, на основе данных фотограмметрии, и обеспечивающей визуализацию трехмерной модели мира, например, через очки виртуальной реальности. 2 н.п. ф-лы, 6 ил.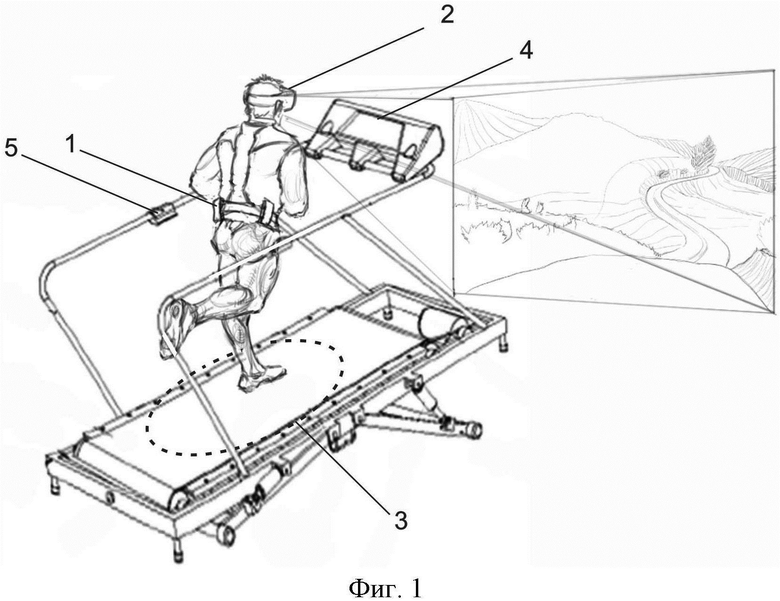
1. Беговой тренажёр с системой виртуальной реальности, содержащий беговую дорожку, вычислительное устройство, обеспечивающее визуализацию виртуальной реальности, систему управления, отличающийся тем, что беговая дорожка имеет по меньшей мере две степени свободы, включает привод вертикального канала и привод канала крена, при этом беговая дорожка выполнена с возможностью изменения наклона как в продольном, так и в поперечном направлении в зависимости от особенностей рельефа виртуальной трассы, за счёт того, что управляющие сигналы подают напряжение на переднюю или заднюю пару толкающих приводов вертикального канала, если рельеф в виртуальной модели изменяется по перепаду высот, причем усилия на приводах вызывают поворот опорных рычагов, за счет чего внешняя силовая рама поднимает переднюю или заднюю свою часть, а также управляющие сигналы включают силовые реле в контуре крена и напряжение подается одновременно, но с обратной полярностью на правый и левый приводы канала крена, что приводит к вращению внутренней подвижной рамы, если в виртуальной модели рельеф меняется по кривизне поверхности в поперечном направлении.
2. Способ имитации перемещения в виртуальной реальности в процессе занятий на беговом тренажёре, характеризующийся тем, что:
выбирают один из заданных режимов движения и виртуальную модель;
после запуска выполнения виртуальной модели отслеживают положение пользователя, находящегося изначально в центральной части полотна беговой дорожки;
в процессе реализации виртуальной модели изменяют угол наклона силовой рамы тренажёра в продольном и поперечном направлениях в соответствии с изменением рельефа трассы виртуальной модели;
при этом непрерывно отслеживают местоположение пользователя в заданной терминальной зоне в центре тренажёра и в случае смещения пользователя за пределы этой зоны изменяют углы наклона силовой рамы и вращают подвижную раму, а также при необходимости изменяют скорость движения полотна таким образом, что, согласовываясь с виртуальной моделью, приводят пользователя в заданную терминальную зону;
после проведения коррекции система управления возвращает положение полотна дорожки в соответствие с рельефом виртуальной модели.
| CN107866033 A, 2018-04-03 | |||
| CN106659923 A, 2017-05-10 | |||
| Тормоз для испытательных машин с маятниковым силоизмерителем | 1950 |
|
SU87686A1 |
| CN107335180 A, 2017-11-10 | |||
| CN207085180 U, 2018-03-13 | |||
| KR20180064794 A, 2018-06-15 | |||
| CN208018032 U, 2018-10-30 | |||
| TW201733639 A, 2017-10-01. | |||

