Заявляемое изобретение относится к измерительной технике и предназначено для измерения поверхностного распределения магнитных полей или контроля уровня намагниченности образцов плоскостных источников постоянного магнитного поля: ферромагнитных пленок и магнитных систем с ферромагнитными чувствительными элементами.
Известно устройство для измерения параметров магнитного поля [патент на полезную модель RU №93539, МПК G01N 27/82, G01R 33/02, опубл. 27.04.2010]. Устройство для измерения параметров магнитного поля включает в себя последовательно соединенные источник тока, датчик Холла, соединенный с датчиком положения, усилитель, аналого-цифровой преобразователь, микроконтроллерный блок, блок для вывода информации.
Недостатком данного устройства является то, что оно не обеспечивает:
- размещение и фиксацию плоскостного источника постоянного магнитного поля, что ограничивает области применения известного устройства;
-перемещение датчика Холла в вертикальной плоскости, что не позволяет проводить локальные измерения пространственного распределения магнитного поля для заданного участка поверхности образца.
Также известна система для измерения поверхностного распределения магнитного поля низкой или чрезвычайно низкой частоты [патент на изобретение US №7471084 В2, МПК G01R 33/02, опубл. 30.12.2008].
Система включает в себя чувствительный элемент, включающий три ортогонально расположенных феррозондовых датчика магнитного поля, роботизированную систему пространственного перемещения чувствительного элемента, контроллер позиционирования чувствительного элемента, тестовую камеру с размещенными в ней тремя катушками Фанселау для формирования измеряемых магнитных полей, плату сбора и передачи данных с последовательно соединенными трехканальным предварительным усилителем мощности переменного тока со встроенным эквалайзером, трехканальным выпрямителем переменного тока со сглаживающим фильтром, трехканальным аналоговым мультиплексором, аналого-цифровым преобразователем и управляющим контроллером.
Недостатком данной системы является то, что она не обеспечивает размещение и фиксацию плоскостного источника постоянного магнитного поля, что ограничивает области применения известной системы.
Наиболее близким по технической сущности к заявляемому комплексу является способ измерения многомерного распределения магнитного поля образца в реальном времени и устройство для его осуществления [патент на изобретение US №6611142 В1, МПК G01R 33/10, G01R 33/07, опубл. 26.08.2003].
Известное устройство измерения многомерного распределения магнитного поля образца в реальном времени состоит из измерительного стола, векторного магнитометра с тремя ортогонально расположенными датчиками магнитного поля на основе эффекта Холла, контроллера системы перемещения, контроллера векторного магнитометра, системы горизонтального перемещения, управляющего персонального компьютера, монитора, принтера, клавиатуры, манипулятора «мышь». Взаимодействие компонентов устройства измерения многомерного распределения магнитного поля образца обеспечивается шиной данных и управления.
Контроллер векторного магнитометра включает в себя многоканальный предварительный усилитель, аналоговый мультиплексор, аналого-цифровой преобразователь, управляющий контроллер векторного магнитометра.
В процессе функционирования устройства, системой горизонтального перемещения осуществляется линейное перемещение векторного магнитометра относительно поверхности образца по управляющим командам, получаемым от контроллера системы перемещения.
Обработка результатов измерений выполняется элементами контроллера векторного магнитометра, а именно:
- усиление и нормализация входного напряжения феррозондовых датчиков - предварительный усилитель;
- коммутация феррозондовых датчиков со средствами обработки данных в соответствии с процедурой измерений - аналоговый мультиплексор;
- преобразование входных сигналов в двоичный код - аналого-цифровой преобразователь;
- формирование управляющих воздействий для аналого-цифрового преобразователя и аналогового мультиплексора, передача данных в управляющий персональный компьютер - устройство управления.
По результатам измерений, встроенным программным обеспечением управляющего персонального компьютера осуществляется построение карты поверхностного распределения магнитного поля с привязкой к прямоугольной системе координат на плоскости образца.
Недостатком данной системы является то, что она не обеспечивает перемещение датчиков магнитного поля на основе эффекта Холла в вертикальной плоскости, что не позволяет проводить локальные измерения пространственного распределения магнитного поля для заданного участка поверхности образца.
Технический результат заключается в обеспечении возможности пространственной локализации и определения размеров дефектов поверхностного распределения магнитного поля образца в автоматическом режиме.
Указанный технический результат достигается тем, что автоматизированное рабочее место измерения многомерного распределения магнитного поля, включающее измерительный стол с закрепленной на нем системой горизонтального перемещения, входы которой соединены с соответствующими выходами контроллера системы перемещения, чувствительный элемент, включающий три ортогонально расположенных феррозондовых датчика магнитного поля, выходы которых соединены со входами контроллера векторного магнитометра, включающего последовательно соединенные предварительный усилитель, аналоговый мультиплексор, устройство управления, управляющий выход которого также соединен с управляющим входом аналогового мультиплексора, при этом входы и выходы контроллера системы перемещения и контроллера векторного магнитометра соединены с соответствующими входами и выходами управляющего персонального компьютера посредством шины данных и управления, дополнительно содержит систему вертикального перемещения чувствительного элемента, вход которой соединен с соответствующим выходом контроллера системы перемещения, устройство хранения информации и блок регистрации образца, входы и выходы которых соединены с входами и выходами управляющего персонального компьютера посредством шины данных и управления.
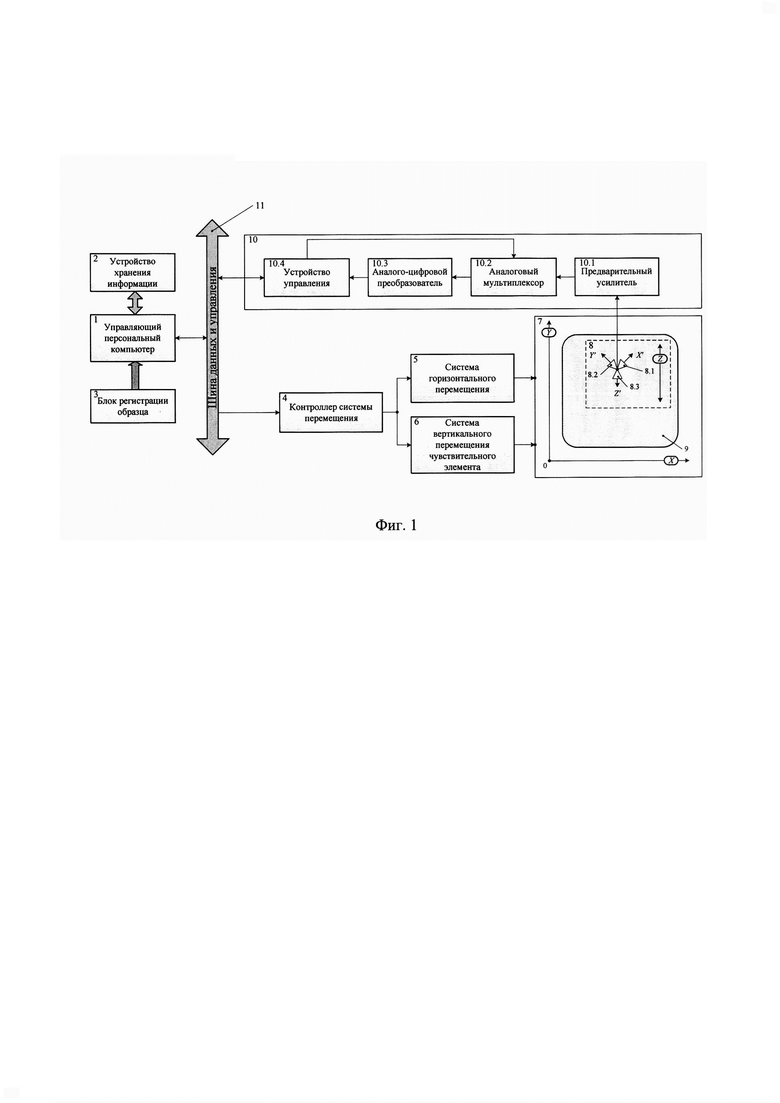
Сущность предлагаемого технического решения поясняется чертежом фиг. 1, на котором показана структурная схема заявляемого автоматизированного рабочего места измерения многомерного распределения магнитного поля.
Предлагаемое автоматизированное рабочее место измерения многомерного распределения магнитного поля включает в себя: управляющий персональный компьютер (1), устройство хранения информации (2), блок регистрации образца (3), контроллер системы перемещения (4), систему горизонтального перемещения (5), систему вертикального перемещения чувствительного элемента (6), измерительный стол (7) с размещенным на нем образцом (9), векторный магнитометр (10), включающий: предварительный усилитель (10.1), аналоговый мультиплексор (10.2), аналого-цифровой преобразователь (10.3), устройство управления (10.4), чувствительный элемент (8), включающий три ортогонально расположенных датчика магнитного поля (8.1-8.3) на основе эффекта Холла, шину данных и управления (11).
Выход чувствительного элемента (8) соединен со входом предварительного усилителя (10.1), входящего в состав контроллера векторного магнитометра (10), включающего последовательно соединенные предварительный усилитель (10.1), аналоговый мультиплексора (10.2), аналого-цифровой преобразователь (10.3) и устройство управления (10.4), входы и выходы которого связаны с соответствующими входами и выходами управляющего персонального компьютера (1) посредством шины данных и управления (11).
Также к соответствующим входам и выходам управляющего персонального компьютера (1) подсоединены входы и выходы устройства хранения информации (2), блока регистрации образца (3), а также, посредством шины данных и управления (11), вход контроллера системы перемещения (4), выходы которого связаны с соответствующими входами системы горизонтального перемещения (5) и системы вертикального перемещения чувствительного элемента (6), жестко закрепленых на измерительном столе (7).
Блок регистрации образца (3) обеспечивает оптическое считывание штрихового кода, нанесенного на индивидуальный антистатический пакет, в котором образец (9) подается на заявляемое автоматизированное рабочее место измерения многомерного распределения магнитного поля образца, с целью получения идентификационного номера образца, и передачу полученного идентификационного номера образца на управляющий персональный компьютер (1). Формат отображения и принцип его преобразования в последовательность символов изложены в ГОСТ ISO/IEC 15420-2010 «Автоматическая идентификация. Кодирование штриховое. Спецификация символики штрихового кода EAN/UPC».
Техническая реализация блока регистрации образца (3) может быть осуществлена с использованием известного из уровня техники оптического считывателя штриховых кодов Voyager ХР 1470g (Honeywell, США).
Система горизонтального перемещения (5) и система вертикального перемещения чувствительного элемента (6) аналогичны по конструкции и представляют собой шаговый электродвигатель с промежуточной сильфонной соединительной муфтой и приводной шарико-винтовой передачи, на подвижной каретке которой жестко закреплены: образец (9) для системы горизонтального перемещения (5) и чувствительный элемент (8) для системы вертикального перемещения чувствительного элемента (6).
Элементы системы горизонтального перемещения образца (5) и системы вертикального перемещения чувствительного элемента (6) жестко закреплены на измерительном столе (7) и на фиг. 1 не показаны.
Приводной винт шарико-винтовой передачи системы горизонтального перемещения (5) расположен параллельно плоскости измерительного стола (7), винт шарико-винтовой передачи системы вертикального перемещения чувствительного элемента (6) расположен перпендикулярно плоскости измерительного столика (7) по оси геометрического центра измерительного стола.
Контроллер системы перемещения (4) представляет собой управляющую материнскую плату с размещенными на ней управляющим процессором, источником электропитания и микросхемами управления встроенными приводами системы горизонтального перемещения (5) и системы вертикального перемещения чувствительного элемента (6).
Контроллер системы перемещения (4) обеспечивает формирование управляющих воздействий для шаговых электродвигателей с приводными шарико-винтовыми передачами, входящими в систему горизонтального перемещения (5) и систему вертикального перемещения чувствительного элемента (6) в соответствии с требуемыми параметрами линейного перемещения образца (9) по осям X, Y и чувствительного элемента (8) по оси Z декартовой системы координат в трехмерном пространстве.
Информационное взаимодействие контроллера системы перемещения (4) и управляющего персонального компьютера (1) осуществляется в соответствии с требованиями стандарта на способ кодирования информации управляющих программ устройств с числовым программным управлением ГОСТ 20999-83.
Техническая реализация контроллера системы перемещения (4) может быть осуществлена с использованием известного из уровня техники платы управления устройств с числовым программным управлением MKS SBASE («Makerbase Co.,Ltd», КНР).
Устройство хранения информации (2) представляет собой массив жестких магнитных дисков и предназначено для хранения результатов измерения поверхностного распределения магнитных полей образцов, а также обеспечения доступа к ним по заданному идентификационному номеру образца (15).
Векторный магнитометр (10) состоит из последовательно соединенных предварительного усилителя (10.1), аналогового мультиплексора (10.2), аналого-цифрового преобразователя (10.3) и устройства управления (10.4). Феррозондовые датчики магнитного поля (8.1-8.3) чувствительного элемента (8) подключены к соответствующим входам предварительного усилителя (10.1).
В процессе горизонтального перемещения измерительного стола (7) с размещенным на нем образцом (9) относительно текущего положения чувствительного элемента (8) наблюдаются локальные изменения магнитного рельефа, определяемые поверхностной структурой образца (9). Магнитный рельеф оказывает воздействие на датчики магнитного поля (8.1-8.3) на основе эффекта Холла и преобразуется в электропотенциальный рельеф с распределением вектора магнитной индукции вдоль чувствительных осей координат X', Y' и Z' (см. Фиг. 1). Сигналы с выходов датчиков магнитного поля (8.1-8.3) поступают на соответствующие входы предварительного усилителя (10.1). Усиленное напряжение с выходов предварительного усилителя (10.1) поступает на входы аналогового мультиплексора (10.2), обеспечивающего передачу требуемой составляющей выходного сигнала для чувствительных осей координат X', Y' и Z' чувствительного элемента (8) в соответствии с программной исследования образца (9) и управляющей командой, полученной от устройства управления (10.4). Заданная компонента выходного сигнала поступает на вход аналого-цифрового преобразователя (10.3), где преобразуется в цифровой код, который затем передается в устройство управления для дальнейшей обработки передачи на вход управляющего персонального компьютера (1) посредством шины данных и управления (11). Формат представления цифрового кода и управляющих команд определяется стандартом IEEE 488.2-1992 «IEEE Standard Digital Interface for Programmable Instrumentation».
Техническая реализация векторного магнитометра (10) может быть осуществлена с использованием известного из уровня техники трехосевого векторного магнитометра ТНМ1176 (Metrolab Technology SA, Швейцария).
В памяти управляющего персонального компьютера (1) установлена программа управления автоматизированным рабочим местом измерения многомерного распределения магнитного поля образца, которая может быть реализована в виде программного модуля с применением инструментальных средств системы программирования Windows Presentation Foundation (WPF), использующих расширяемый язык разметки XAML.
Программа управления автоматизированным рабочим местом измерения многомерного распределения магнитного поля образца обеспечивает выполнение следующих функций:
- регистрация образца (9) по идентификационному номеру образца, считанному блоком регистрации образца (3);
- оперативное управление векторным магнитометром (10), входящим во состав предлагаемого рабочего места;
- расчет параметров горизонтального перемещения образца (9) и вертикального перемещения чувствительного элемента (8) в зависимости от текущих значений координат X, Y положения образца и координаты Z положения чувствительного элемента (см. Фиг. 1);
- формирование управляющих команд для системы горизонтального перемещения (5) и системы вертикального перемещения чувствительного элемента (6) в соответствии с форматом, определяемым требованиями ГОСТ 20999-83 и их передача контроллеру систем перемещения (4);
- визуализация результатов измерения распределения магнитного поля по поверхности образца (9);
- протоколирование и запись на устройство хранения информации (2) результатов измерения параметров поверхностного распределения магнитного поля, их привязка к идентификационному номеру образца (9).
Рассмотрим процесс функционирования заявляемого автоматизированного рабочего места измерения многомерного распределения магнитного поля.
Перед началом процесса измерений, осуществляется регистрация поступившего образца (9) с использованием блока регистрации образца (3), при этом осуществляется считывание индивидуального штрихового кода, который содержит идентификационный номер образца (9) контроля в графической форме.
Исследуемый образец (9) размещается на измерительном столике (7) таким образом, чтобы предполагаемое направление вектора намагничивания образца было направлено вдоль оси Y перемещения образца относительно текущего положения чувствительного элемента (8). При этом за начало координат принимается левый нижний угол поверхности образца.
Пользователем вводятся параметры горизонтального перемещения образца по осям X, Y и вертикального перемещения чувствительного элемента по оси Z в соответствии с линейными размерами образца (9):
- начальное значение координаты X плоскости образца;
- шаг перемещения образца по координате X;
- конечное значение координаты X плоскости образца;
- начальное значение координаты Y плоскости образца;
- шаг перемещения образца по координате Y;
- конечное значение координаты Y плоскости образца;
- начальное значение координаты Z чувствительного элемента;
- шаг перемещения чувствительного элемента по координате Z;
- конечное значение координаты Z чувствительного элемента/
Горизонтальное перемещение образца (9) осуществляется системой горизонтального перемещения (5) вдоль координатных осей X и Y плоскости образца таким образом, чтобы предназначенный для измерений участок образца (9) был расположен на оси чувствительного элемента и в процессе измерений параметров поверхностного распределения магнитного поля была охвачена вся площадь образца. Перемещение чувствительного элемента (8) осуществляется системой вертикального перемещения чувствительного элемента (6) вдоль координатной оси Z таким образом, чтобы обеспечивалось вертикальное позиционирование чувствительного элемента для заданного диапазона расстояний от внешней поверхности чувствительного элемента до поверхности образца (9).
Непосредственно процесс измерения характеристик поверхностного распределения магнитного поля образца (15) осуществляется по следующему алгоритму:
1) перемещение чувствительного элемента (8) в точку вертикального позиционирования с заданной координатой Z1;
2) перемещение образца (9) точку горизонтального позиционирования с заданными координатами X1 и Y1;
3) регистрация векторным магнитометром (10) составляющих вектора магнитной индукции вдоль чувствительных осей координат X', Y' и Z' на выходе чувствительного элемента (8);
4) сохранение текущих значений составляющих вектора магнитной индукции вдоль чувствительных осей координат X', Y' и Z' на выходе чувствительного элемента (8) в устройстве хранения информации (2) с указанием параметров X1, Y1 и Z1;
5) перемещение образца (9) точку горизонтального позиционирования с заданными координатами Х2 и Y2, при этом Х2>X1 и Y2>Y1;
6) регистрация векторным магнитометром (10) составляющих вектора магнитной индукции вдоль чувствительных осей координат X', Y' и Z' на выходе чувствительного элемента (8);
7) сохранение текущих значений составляющих вектора магнитной индукции вдоль чувствительных осей координат X', Y' и Z' на выходе чувствительного элемента (8) в устройстве хранения информации (2) с указанием параметров Х2, Y2 и Z2;
8) повторение пунктов 2-7 для заданного диапазона координат X и Y при этом максимальные значения координат X и Y ограничены линейными размерами образца (9);
9) повторение пунктов 2-7 для заданного диапазона координат X и Y при этом максимальные значения координат X и Y ограничены линейными размерами образца (9);
10) повторение пунктов 1-9 для заданного пользователем диапазона значений координаты Z с заданным шагом.
После завершения процесса измерения характеристик поверхностного распределения магнитного поля образца (9) программой управления автоматизированным рабочим местом многомерного распределения магнитного поля образца выполняется визуализация результатов измерения поверхностного распределения магнитного поля с формированием контурных карт распределения магнитного поля раздельно для чувствительных осей координат X', Y' и Z'. При этом для значений составляющих вектора магнитной индукции вдоль чувствительных осей координат X', Y' и Z' рассчитывается значение математического ожидания и дисперсии полученных значений.
Таким образом, предлагаемое автоматизированное рабочее место измерения многомерного распределения магнитного поля образца в автоматизированном режиме с непрерывной регистрацией пространственного распределения составляющих вектора магнитной индукции и формированием контурных карт распределения магнитного поля по площади испытываемого образца, что обеспечивает неразрушающий контроль качества и однородности поверхности образцов и позволяет определить оптимальные параметры технологического процесса производства испытываемых плоскостных источников постоянного магнитного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное устройство измерения магнитных характеристик ферромагнитных пленок | 2021 |
|
RU2774859C1 |
| СКАНИРУЮЩИЙ СПЕКТРОМЕТР ФЕРРОМАГНИТНОГО РЕЗОНАНСА | 2020 |
|
RU2747100C1 |
| Спектрометр ферромагнитного резонанса | 2022 |
|
RU2791860C1 |
| Способ определения петель гистерезиса аморфных ферромагнитных микропроводов на основе железа | 2023 |
|
RU2814644C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ И ПОЛНОГО ВЕКТОРА НАПРЯЖЕННОСТИ ГЕОМАГНИТНОГО ПОЛЯ | 2016 |
|
RU2624597C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Локальный широкополосный спектрометр ферромагнитного резонанса | 2022 |
|
RU2784818C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| МАГНИТОМЕТР-ГРАДИЕНТОМЕТР НА ОСНОВЕ СКВИДОВ ПОСТОЯННОГО ТОКА ИЗ ВЫСОКОТЕМПЕРАТУРНЫХ СВЕРХПРОВОДНИКОВ | 2008 |
|
RU2384856C1 |
Изобретение относится к измерительной технике. Автоматизированное рабочее место измерения многомерного распределения магнитного поля дополнительно содержит систему вертикального перемещения чувствительного элемента, вход которой соединен с соответствующим выходом контроллера системы перемещения, устройство хранения информации и блок регистрации образца, входы и выходы которых соединены с входами и выходами управляющего персонального компьютера посредством шины данных и управления. Технический результат заключается в обеспечении возможности пространственной локализации и определения размеров дефектов поверхностного распределения магнитного поля образца в автоматическом режиме. 1 ил. 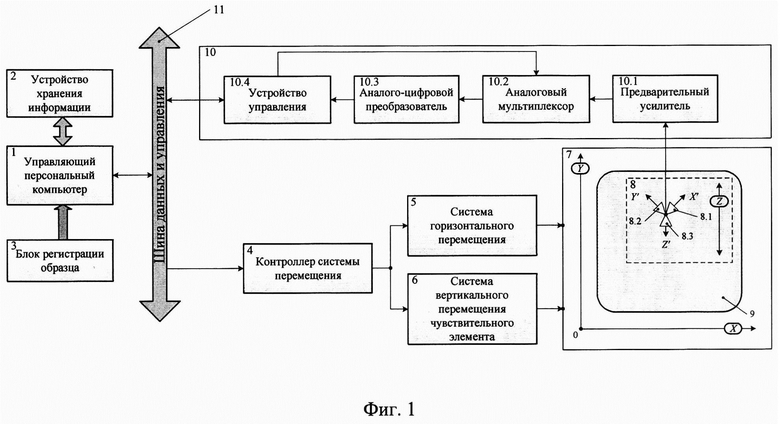
Автоматизированное рабочее место измерения многомерного распределения магнитного поля, включающее измерительный стол с закрепленной на нем системой горизонтального перемещения, входы которой соединены с соответствующими выходами контроллера системы перемещения, чувствительный элемент, включающий три ортогонально расположенных феррозондовых датчика магнитного поля, выходы которых соединены с входами контроллера векторного магнитометра, включающего последовательно соединенные предварительный усилитель, аналоговый мультиплексор, устройство управления, управляющий выход которого также соединен с управляющим входом аналогового мультиплексора, при этом входы и выходы контроллера системы перемещения и контроллера векторного магнитометра соединены с соответствующими входами и выходами управляющего персонального компьютера посредством шины данных и управления, отличающееся тем, что дополнительно содержит систему вертикального перемещения чувствительного элемента, вход которой соединен с соответствующим выходом контроллера системы перемещения, устройство хранения информации и блок регистрации образца, входы и выходы которых соединены с входами и выходами управляющего персонального компьютера посредством шины данных и управления.
| US 6611142 B1, 26.08.2003 | |||
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2245542C2 |
| Раствор для электрохимическогопОлиРОВАНия бЕРиллиЕВОй бРОНзы | 1979 |
|
SU802413A1 |
| CN 113342557 A, 03.09.2021. | |||

