Изобретение относится к области контрольно-измерительной техники, более конкретно к устройствам для контроля параметров лазерного поля управления, создаваемого информационным каналом. Лазерное поле управления ЛПУ представляет собой поток лазерного излучения, модулированный по определенному закону.
Информационный канал [1, 2] включает в себя, по крайней мере, излучатель и блок модулятора. Блок модулятора включает в себя проекционную оптическую систему, растр, оборачивающую систему и панкреатическую систему. Лазерное излучение, создаваемое излучателем, посредством проекционной и оборачивающей систем дважды проходит через вращающийся растр, осуществляющий пространственно-временную модуляцию излучения, и имеет две модуляционные кодовые дорожки: внутреннюю кодовую дорожку, изображение которой в фокальной плоскости проекционной оптической системы перемещается сверху вниз, и внешнюю кодовую дорожку, изображение которой в фокальной плоскости проекционной оптической системы перемещается справа налево. Модулированное лазерное излучение попадает в панкреатическую систему, которая изменяет масштаб изображения кодовых дорожек растра по закону, задаваемому профилем кулачка привода панкреатической системы. Точка пересечения оси внутренней кодовой дорожки растра и оси внешней кодовой дорожки растра соответствует пересечению информационного нуля по каждой из дорожек соответственно и располагается на оси панкреатической системы, а наложенные изображения внутренней кодовой дорожки на внешнюю кодовую дорожку образуют информационный квадрат, в пределах которого при вращении растра формируются сигналы управления в соответствии с циклограммой работы информационного канала в виде последовательности импульсов, содержащих информацию о смещении от центра ЛПУ в плоскости, перпендикулярной направлению распространения по двум координатам Y и Z. Таким образом, на выходе наблюдаются наложенные изображения кодовых дорожек в виде информационного квадрата, в пределах которого заключено изображение светового пятна лазерного пучка излучения, причем размеры этих наложенных изображений изменяются в соответствии с циклограммой работы панкреатической системы, которая поддерживает размер ЛПУ постоянным на всей траектории движения управляемого объекта.
Известно устройство для контроля параметров лазерного поля управления информационного канала [3], содержащее три оптические головки, каждая из которых включает фокусирующую систему, в фокальной плоскости которой имеется узел сетки с точечной диафрагмой и оптически связанный с фотоприемным устройством, последовательно соединенным с блоком выделения команд и регистрирующим блоком. Регистрирующий блок включает в себя стрелочный индикатор, цифровой вольтметр и шлейфовый осциллограф. Каждая оптическая головка имеет механизм горизонтального и вертикального наведения, работающий в ручном режиме, для согласования осей оптических головок с оптической осью информационного канала. Каждый узел сетки снабжен механизмом перемещения по одной координате и механизмом поворота на 90° узла сетки вместе с механизмом перемещения для сканирования по другой координате. Проверяемое изделие устанавливается на подставке, которая может перемещаться и устанавливаться напротив соответствующей оптической головки. Устройство позволяет определить размеры лазерного пятна, заключенного в пределах информационного квадрата, и определить размеры ЛПУ, распределение энергетической освещенности в ЛПУ и параметры углового распределения модулированного лазерного излучения по двум координатам в виде пеленгационной характеристики. Причем первая оптическая головка производит контроль параметров при конечном положении компонентов панкреатической системы, а вторая - при начальном. Третья оптическая головка производит контроль величины рассогласования оси распространения ЛПУ к оси информационного канала, т.е. производит оценку величины рассогласования оси распространения ЛПУ к оси информационного канала в процессе движения компонентов панкреатической системы. Обработка результатов производится вручную путем обработки осциллограммы, записанной на шлейфовом осциллографе.
Недостатками данного устройства являются невысокая точность и невысокое быстродействие из-за проведения измерений и обработки результатов вручную.
Наиболее близким является устройство для контроля параметров лазерного излучения [4], содержащее оптически связанные фокусирующую систему, в фокальной плоскости которой установлен блок калиброванных диафрагм, снабженный механизмом перемещения, осуществляющим смену диафрагм, и фотоприемное устройство, выполненное в виде оптической головки с четырехсегментным фотоприемником, причем оптическая головка снабжена устройством наведения в пространстве, при этом блок калиброванных диафрагм жестко связан с корпусом оптической головки, выходы четырехсегментного фотоприемника соединены через усилитель соответственно с первым, вторым, третьим и четвертым входами аналого-цифрового преобразователя, выход которого соединен с контроллером, реализованным на базе микроЭВМ, первый выход которого соединен с регистрирующим прибором, блок управления, вход которого соединен со вторым выходом контроллера, а первый, второй, третий выходы блока управления соединены соответственно с первым и вторым входами устройства наведения в пространстве и с механизмом перемещения.
Данное устройство обеспечивает измерение диаметра лазерного пучка, а также его мощности или энергии. Недостатком устройства является недостаточно высокая точность и узкий диапазон измерения параметров лазерного излучения из-за ограниченного количества калиброванных диафрагм и фиксированного фокусного расстояния фокусирующей системы. Кроме того, устройство не позволяет производить измерение параметров модулированного лазерного излучения. В частности, устройство не позволяет проводить измерение распределения энергетической освещенности ЛПУ по двум координатам Y и Z, измерение пеленгационной характеристики по двум координатам Y и Z при различных положениях компонентов панкреатической системы, а также определять величину рассогласования оси распространения ЛПУ к оси информационного канала в процессе движения компонентов панкреатической системы.
Задачей изобретения является расширение функциональных возможностей устройства, повышение точности измерений и повышение быстродействия контроля параметров ЛПУ.
Поставленная задача достигается тем, что в устройстве для контроля параметров ЛПУ информационного канала, включающем оптически связанные фокусирующую систему, в фокальной плоскости которой установлен блок калиброванных диафрагм, снабженный первым механизмом перемещения, и фотоприемное устройство (ФПУ), выход которого соединен с первым входом аналого-цифрового преобразователя (АЦП), выход которого соединен с первым входом контроллера, блок управления (БУ), первый вход которого соединен с первым выходом контроллера, второй выход контроллера подключен к входу регистрирующего блока, первый, второй и третий выходы блока управления соединены соответственно с первым входом первого механизма перемещения, с первым и вторым входами устройства наведения в пространстве, в отличие от прототипа, введен блок выделения команд (БВК), первый вход которого соединен с выходом ФПУ, первый и второй выходы БВК соединены соответственно со вторым и третьим входами АЦП, четвертый вход АЦП соединен с третьим выходом контроллера, фокусирующая система выполнена с переменным значением фокусного расстояния и с постоянным положением фокальной плоскости и содержит телеобъектив и оптическую систему, снабженную вторым механизмом перемещения, вход которого соединен с четвертым выходом БУ, а выход - со вторым входом контроллера, первый механизм перемещения выполнен в виде двухкоординатного сканирующего устройства, второй вход которого соединен с пятым выходом БУ, первый и второй выходы первого механизма перемещения соединены соответственно с третьим и четвертым входами контроллера, фокусирующая система с блоком калиброванных диафрагм, ФПУ и БВК выполнены в виде единой оптической головки, снабженной устройством наведения в пространстве, первый и второй выходы которого соединены соответственно с пятым и шестым входами контроллера, седьмой вход которого соединен с шестым выходом БУ, седьмой выход которого соединен с входом ФПУ и со вторым входом БВК, в качестве регистрирующего блока использован персональный компьютер с монитором, выход персонального компьютера соединен с восьмым входом контроллера.
Фокусирующая система выполнена с переменным значением фокусного расстояния и с постоянным положением фокальной плоскости и содержит телеобъектив и оптическую систему, снабженную вторым механизмом перемещения, что позволяет расширить диапазон и повысить точность измерения параметров лазерного излучения, а также обеспечить измерение параметров модулированного лазерного излучения при различных положениях компонентов панкреатической системы информационного канала.
Выполнение фокусирующей системы с переменным значением фокусного расстояния и с постоянным положением фокальной плоскости, в которой расположен блок калиброванных диафрагм, снабженный двухкоординатным сканирующим устройством, позволяет осуществлять сканирование потока модулированного лазерного излучения по двум координатам при различных положениях компонентов панкреатической системы информационного канала. Введение в устройство БВК обеспечивает время-импульсную обработку сигнала, поступающего из ФПУ, с получением сигналов в виде напряжений по двум координатам и пропорциональных командам управления. Сигнал с ФПУ и сигнал по каждой из координат, обработанный в БВК, передается для последующей обработки в электронно-логический блок, состоящий из АЦП, контроллера и блока управления, для выполнения обработки полученной информации в виде цифрового кода, обеспечивающего совместные работы с персональным компьютером в режимах измерения и регистрации результатов, позволяет расширить функциональные возможности по сравнению с прототипом и проводить измерения следующих параметров: распределение энергетической освещенности по информационному полю, определение информационного центра ЛПУ, зависимость команды управления от величины смещения от информационного центра ЛПУ, т.е. пеленгационной характеристики, определение величины рассогласования оси распространения ЛПУ к оси информационного канала в процессе движения компонентов панкреатической системы, т.е. закон смещения координат информационного центра ЛПУ за все время движения компонентов панкреатической системы.
Наличие контроллера, работающего в режиме микропроцессора, с обратными электрическими связями с исполнительными механизмами обеспечивает постоянное согласование уровней сигналов в соответствии с заданной циклограммой работы всех исполнительных механизмов устройства с выявлением динамических ошибок и их постоянной корректировкой в процессе измерений, что позволяет повысить точность измерений за счет режима самоконтроля устройства.
Выполнение регистрирующего блока в виде персонального компьютера обеспечивает быструю обработку полученной информации, расчет характеристик ЛПУ с выдачей информации в удобном для оператора виде.
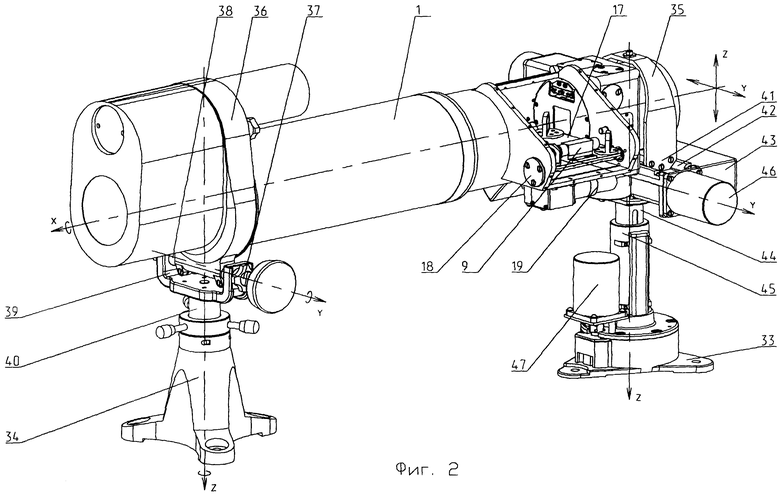
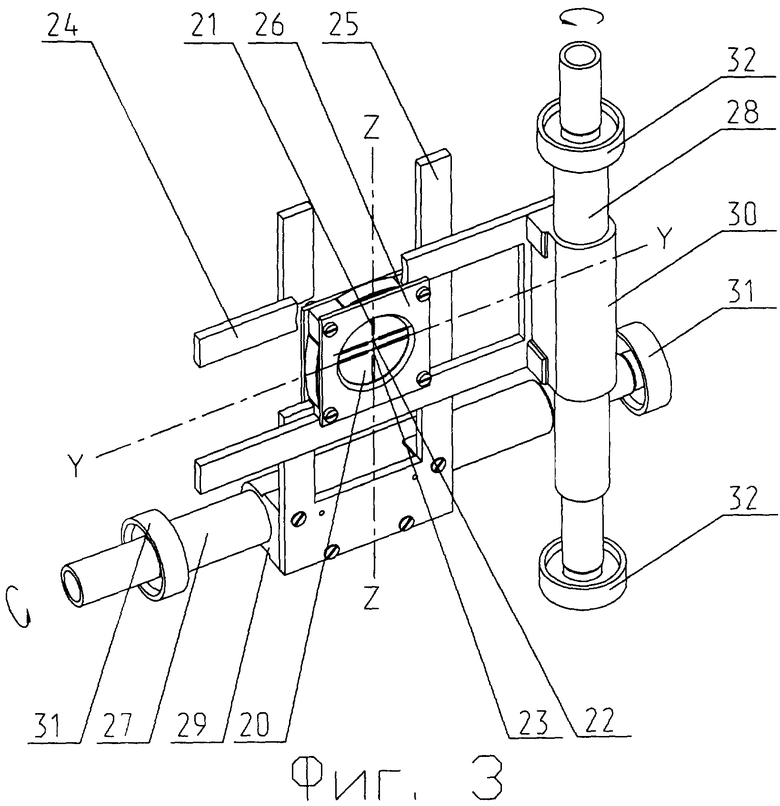
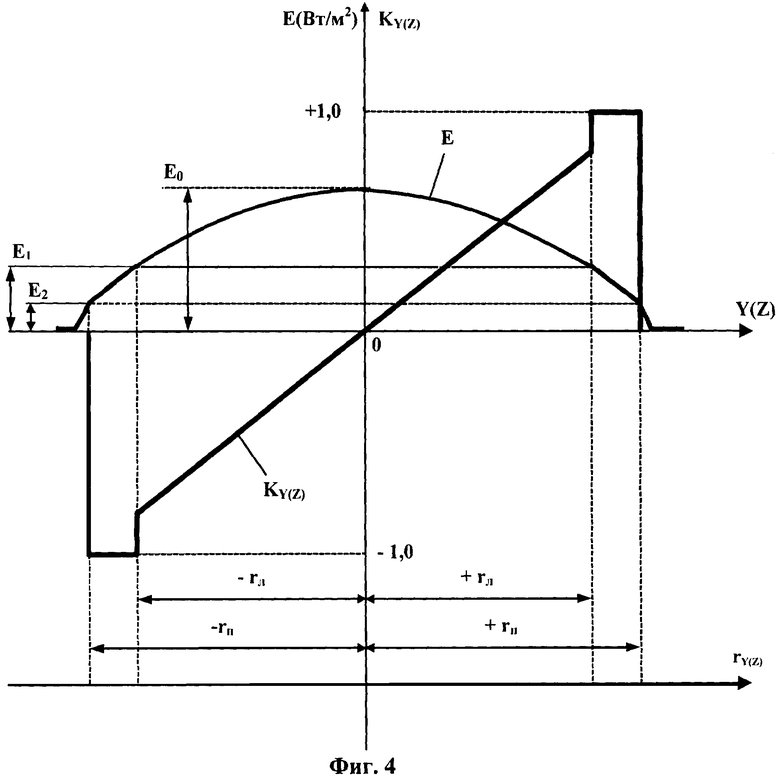
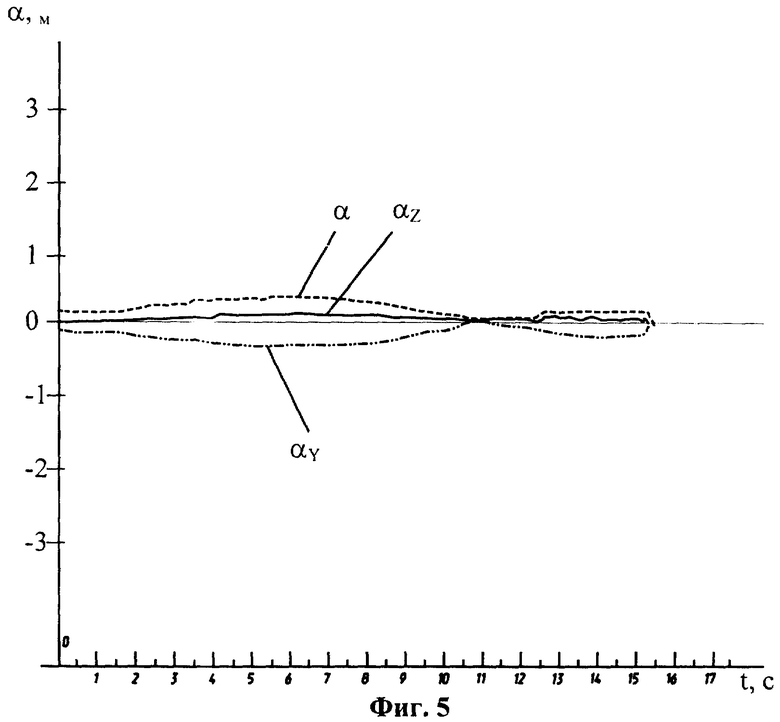
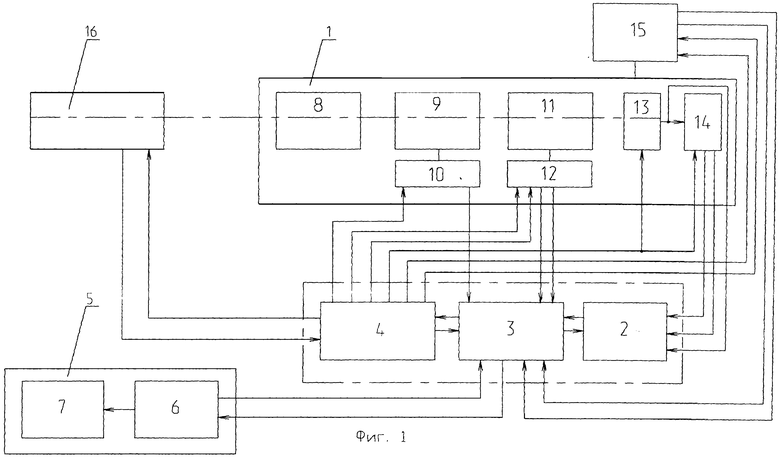
На фиг.1 представлена блок-схема устройства для контроля параметров ЛПУ информационного канала, на фиг.2 представлена оптическая головка с устройством наведения в пространстве, на фиг.3 представлена конструкция двухкоординатного сканирующего устройства, на фиг.4 представлены графики распределения освещенности по ЛПУ и пеленгационная характеристика Кy, Kz при сканировании по направлениям Y и Z, на фиг.5 представлены графики величины рассогласования оси распространения ЛПУ к оси информационного канала.
Устройство для контроля параметров ЛПУ информационного канала (см. фиг.1) содержит оптическую головку 1, а также аналого-цифровой преобразователь 2, выход которого соединен с первым входом контроллера 3, первый и второй выходы которого соединены соответственно с первым входом блока управления 4 и регистрирующим блоком 5, выполненным в виде персонального компьютера 6 с монитором 7. Оптическая головка 1 состоит из оптически связанных фокусирующей системы, выполненной с переменным значением фокусных расстояний и с постоянным положением фокальной плоскости и включающей в себя телеобъектив 8 и оптическую систему 9, снабженную вторым механизмом перемещения 10, установленного в фокальной плоскости фокусирующей системы блока калиброванных диафрагм 11, снабженного первым механизмом перемещения, выполненным в виде двухкоординатного сканирующего устройства 12, а также фотоприемного устройства 13, выход которого соединен с БВК 14 и с первым входом АЦП 2, а первый и второй выходы БВК 14 соединены соответственно со вторым и третьим входами АЦП 2. Вход второго механизма перемещения 10 соединен с четвертым выходом БУ 4, а выход - со вторым входом контроллера 3. Первый и второй входы двухкоординатного сканирующего устройства 12 соединены соответственно с первым и пятым выходами БУ 4, а первый и второй выходы - соответственно с третьим и четвертым входами контроллера 3. Седьмой выход БУ 4 соединен с входом ФПУ 13 и вторым входом БВК 14, шестой выход БУ 4 соединен с седьмым входом контроллера 3, третий выход которого соединен с четвертым входом АЦП 2.
Оптическая головка 1 снабжена устройством наведения в пространстве 15, первый и второй входы которого соединены соответственно со вторым и третьим выходами БУ 4, а первый и второй выходы - соответственно с пятым и шестым входами контроллера 3, восьмой вход которого подключен к персональному компьютеру 6. На фиг.1 также показан контролируемый информационный канал 16, подключенный к восьмому выходу и второму входу БУ.
Короткофокусный режим обеспечивается телеобъективом 8, а длиннофокусный режим обеспечивается введением в фокусирующую систему посредством второго механизма перемещений 10 оптической системы 9, которая выполнена из системы четырех отклоняющих зеркал и телескопической системы, при этом фокальная плоскость для различных фокусных расстояний остается постоянной.
Второй механизм перемещения (см. фиг.2) состоит из прямоугольного основания 17, снабженного валиками 18, оси которых параллельны оптической оси оптической головки 1. На основании 17 неподвижно установлена оптическая система 9. Валики 18 расположены в опорах, неподвижно закрепленных в корпусе оптической головки 1. Опоры выполнены в виде подшипников (на фиг.2 не показаны). Основание 17 имеет возможность поворота вокруг осей валиков 18. Поворот осуществляется с помощью двигателя 19. Управление вводом и выводом оптической системы 9 в оптический тракт осуществляется в автоматическом режиме путем формирования электрического сигнала для поворота по команде с персонального компьютера 6 через контроллер 3 и БУ 4. Два конечных положения оптической системы 9 (введенное в оптический тракт и выведенное из него) фиксируются микропереключателями, расположенными на основании 17, с передачей информации на контроллер 3 с отображением информации на персональном компьютере 6. Такая система обеспечивает дискретный режим изменения фокусного расстояния.
Оптическая система 9 может быть выполнена в виде панкреатической системы, которая постоянно установлена за телескопическим объективом 8, и посредством второго механизма перемещения 10, осуществляющего перемещение оптических компонентов панкреатической системы, обеспечивает непрерывное изменение фокусного расстояния фокусирующей системы без изменения положения ее фокальной плоскости.
Блок калиброванных диафрагм 11 (см. фиг.3) предназначен для выделения заданных проверяемых участков ЛПУ, расположен в фокальной плоскости фокусирующей системы и может быть выполнен в виде сетки 20 с калиброванными отверстиями, которых может быть не менее одного, и сопряженного с ней узла выбора отверстий. Сетка 20 представляет собой стеклянную подложку, в центральной части которой методом фотолитографии выполнены два перекрестия в виде взаимно перпендикулярных непересекающихся штрихов 21, в центре перекрестий которых выполнены калиброванные отверстия 22, 23 различного диаметра. Выбор отверстия требуемого диаметра осуществляется узлом выбора отверстий (на фиг.3 не показан), который может быть выполнен в виде шторки с отверстием, диаметр которого больше наибольшего диаметра калиброванного отверстия на сетке. Выбор калиброванного отверстия осуществляется совмещением центра отверстия шторки с центром выбранного калиброванного отверстия сетки путем линейного перемещения шторки в направляющих в одну либо другую сторону, открывая и фиксируя требуемое отверстие сетки. Перемещение шторки может осуществляться в ручном режиме.
Размеры точечных калиброванных отверстий выбираются в зависимости от контролируемых параметров ЛПУ информационного канала и в зависимости от мощности светового потока из условия соблюдения линейности характеристики чувствительности ФПУ. Калиброванное отверстие с большим диаметром может использоваться для измерения пеленгационной характеристики по двум координатам Y и Z при различных положениях компонентов панкреатической системы информационного канала, а отверстие меньшего диаметра может использоваться для определения величины рассогласования оси распространения ЛПУ к оси информационного канала в процессе движения компонентов панкреатической системы для разного размера ЛПУ.
Блок калиброванных диафрагм 11 снабжен первым механизмом перемещения, который выполнен в виде двухкоординатного сканирующего устройства 12 (см. фиг.3). Двухкоординатное сканирующее устройство 12 имеет две направляющие 24 и 25, выполненные в виде плоских пластин с прямоугольным пазом, расположенных под прямым углом друг к другу с образованием прямоугольного окна, в котором установлена подвижная площадка 26, сжимающая направляющие к общей плоскости с возможностью их скольжения друг относительно друга и имеющая возможность перемещения в пазах пластин, два регулировочных узла в виде передачи винт-гайка, винты которых выполнены на валах 27 и 28, которые установлены в корпусе оптической головки 1 с возможностью вращения, а гайки 29 и 30 закреплены на соответствующих направляющих 24 и 25 и установлены с возможностью перемещения вдоль осей винтов. Валы 27 и 28 регулировочных узлов расположены на опорах с подшипниками качения 31 и 32, которые закреплены в корпусе оптической головки 1. Валы 27, 28 расположены взаимно перпендикулярно. Двухкоординатное сканирующее устройство 12 обеспечивает перемещение сетки 20 с калиброванными отверстиями 22, 23, закрепленной внутри подвижной площадки 26, в одной плоскости, перпендикулярной оптической оси оптической головки 1 по двум взаимно перпендикулярным направлениям (вдоль оси Y и оси Z). Валы 27, 28 приводятся в движение посредством шаговых двигателей ДШИ-200-1 (на фиг.3 не показаны) по электрическим сигналам, инициируемым по команде с персонального компьютера 6 через контроллер 3 и БУ 4. Каждая направляющая 24 и 25 снабжена датчиком положения (на фиг.3 не показаны), который содержит шкалу, закрепленную на направляющих и сопряженную с оптронной парой, и два микропереключателя для фиксации конечных положений, закрепленных в корпусе оптической головки 1. Датчик положения, имеющий связь с контроллером, производит контроль положения блока калиброванных диафрагм в центральном положении по наличию сигнала с оптронной пары, а также для конечных положений зон сканирования по наличию сигнала с каждого из микропереключателей и одновременно сигнала с оптронной пары по каждой из координат в отдельности. Сканирование изображения ЛПУ осуществляется в одной плоскости: попеременно в горизонтальном (вдоль оси Y) и вертикальном (вдоль оси Z) направлениях. Каждое такое сканирование по каждой из координат осуществляется с шагом 5 мкм.
Механизм наведения в пространстве 15 предназначен для углового совмещения, т.е. обеспечения параллельности оси оптической головки 1 и оси информационного канала 16 при работе устройства в режиме прицеливания путем линейного перемещения по горизонту (ось Y), линейного перемещения по вертикали (ось Z) задней части оптической головки относительно передней части оптической головки, которая установлена с возможностью углового поворота по отношению к оси информационного канала 16.
Механизм наведения в пространстве 15 может быть выполнен в виде двух опор (см. фиг.2): задней опоры 33, которая представляет собой котировочный узел, размещенный в задней части оптической головки 1, и передней опоры 34, расположенной в передней части оптической головки 1, которая обеспечивает необходимые степени свободы при перемещении задней части оптической головки 1 для выполнения углового заклона по отношению к оси информационного канала 16. Каждая из опор имеет цилиндрические направляющие, выполненные в виде центрирующих поясков 35 и 36, в которых установлена оптическая головка 1. Центрирующий поясок 36 передней опоры 34 имеет две горизонтальные полуоси 37 и 38, которые установлены в проушинах П-образного кронштейна 39 с возможностью вращения вокруг этих полуосей 37, 38. П-образный кронштейн 39 закреплен на вертикально ориентированной оси 40, установленной с возможностью вращения в цилиндрической направляющей передней опоры 34 механизма наведения в пространстве 15. Нижняя часть центрирующего пояска 35 задней опоры 33 имеет форму каретки 41. Каретка 41 размещена в направляющих 42 типа ласточкин хвост, жестко закрепленных на основании 43, нижняя часть которого имеет вертикально ориентированную ось 44, на которой закреплена гайка. Ось 44 установлена в цилиндрической направляющей 45 задней опоры 33 механизма наведения в пространстве 15.
Линейное перемещение задней части оптической головки 1 по горизонту (вдоль оси Y) осуществляется перемещением каретки 41 посредством передачи винт-гайка, причем гайка неподвижно закреплена на каретке 41 и перемещается вместе с ней, а винт установлен в опорах, закрепленных в основании 43, с возможностью вращения (на фиг.2 винт и гайка не показаны). Вращение винта осуществляется с помощью шагового двигателя 46, в качестве которого используется шаговый двигатель марки ДШИ-200-3.
Линейное перемещение задней части оптической головки 1 по вертикали (вдоль оси Z) осуществляется посредством перемещения оси 44 задней опоры 33 с помощью передачи винт-гайка (на фиг.2 не показаны), кинематически связанной с шаговым двигателем 47 марки ДШИ-200-3, который совершает линейное перемещение задней части оптической головки 1 вдоль оси Z, при этом гайка неподвижно закреплена на оси 44 задней опоры 33, а профиль винта закреплен в опорах качения, закрепленных в задней опоре 33, и кинематически связан с шаговым двигателем 47.
Необходимые степени свободы для линейных перемещений оптической головки 1 вдоль указанных направлений обеспечивает механизм передней опоры 34: при линейном перемещении задней части оптической головки 1 вдоль оси Y оптическая головка 1 разворачивается вокруг вертикально ориентированной оси 40 передней опоры 34; при линейном перемещении задней части оптической головки 1 вдоль оси Z оптическая головка 1 разворачивается вокруг горизонтальных полуосей 37 и 38.
Непосредственное управление шаговыми двигателями 46, 47 механизма наведения в пространстве 15 осуществляется по команде с персонального компьютера 6 в полуавтоматическом режиме через контроллер 3 и блок управления 4. Конечные положения перемещения каретки 41 по горизонту и вертикали контролируются микропереключателями с передачей информации на контроллер 3 и персональный компьютер 6.
Для ориентации сетки 20 блока калиброванных диафрагм 11 в пространстве относительно горизонта имеется возможность разворота в ручном режиме оптической головки 1 вокруг ее оптической оси (ось X) в цилиндрических направляющих в виде центрирующих поясков 35 и 36 передней 34 и задней 33 опор, совместная ось которых совпадает с оптической осью оптической головки.
Фотоприемное устройство 13 представляет собой фотоприемник на основе фотодиода типа ФД141К и усилителя. ФПУ 13 предназначено для приема светового потока, прошедшего через точечную калиброванную диафрагму, в заданных точках сечения лазерного пучка и последовательного преобразования его в аналоговый электрический сигнал в виде напряжения U, соответствующего уровню освещенности точки ЛПУ.
Блок выделения команд (БВК) 14 осуществляет времяимпульсную селекцию электрических импульсов с целью их декодирования с получением значений команд управления в виде аналогового сигнала со значениями напряжений Uy и Uz, соответствующих смещению центра точечной калиброванной диафрагмы относительно информационного центра ЛПУ при сканировании по направлениям Y и Z. В качестве ФПУ с БВК применен серийно выпускаемый узел марки 9Н244.
Аналогово-цифровой преобразователь 2 предназначен для преобразования аналогового сигнала в цифровой и реализован в виде платы четырехканального десятиразрядного АЦП на основе микросхемы 1113ПВ1А. Для обеспечения устойчивой и стабильной работы на плате имеется схема автосброса.
Контроллер 3 предназначен для управления процессом тестирования и проверки параметров информационного канала 16 и выполнен в виде платы на базе микроконтроллера КР1830ВЕ31, программа которого находится в электрически перепрограммируемом постоянном запоминающем устройстве и содержит алгоритмы тестов. Используемый тип памяти запоминающего устройства позволяет в дальнейшем корректировать алгоритмы тестов.
БУ 4 предназначен для согласования уровней сигналов, формируемых контроллером 3 и передаваемых на исполнительные механизмы оптической головки 1, и реализован в виде усилителей на полупроводниковых транзисторах, а также включает в себя комплексный источник питания исполнительных механизмов оптической головки 1, реализованный в виде DC/DC преобразователя.
Персональный компьютер 6 осуществляет следующие функции:
- самотестирование устройства для контроля параметров ЛПУ информационного канала;
- обеспечение работы устройства в режиме постоянного диалога с оператором;
- управление информационным каналом, оптической головкой и устройством наведения в пространстве;
обработку полученной информации, расчет параметров ЛПУ информационного канала;
- воспроизведение информации в удобном для оператора виде: числовом, графическом на мониторе или принтере;
- сохранение информации о параметрах ЛПУ тестируемого информационного канала в базе данных.
Устройство работает следующим образом.
Тестируемый информационный канал 16 размещают на кронштейне перед входным зрачком устройства и подключают к восьмому выходу и второму входу БУ 4.
При подаче напряжения питания на БУ 4 происходит включение всех блоков заявляемого устройства и тестируемого информационного канала 16 по разрешающей команде с контроллера 3 при условии, что напряжение питания находится в пределах заданных значений. Устройство работает в соответствии с программой, установленной в персональном компьютере 6, в которой реализованы следующие режимы проверки: режим самотестирования оборудования всего заявляемого устройства, режим прицеливания, режим измерения и регистрации. Выполнение режимов инициируется по команде с персонального компьютера 6 через контроллер 3.
В режиме самотестирования контроллер 3 проводит проверку в виде тестов, характеризующих правильность обмена данных между персональным компьютером 6 и контроллером 3 с оценкой работоспособности и выявлением динамических ошибок в соответствии с заданной циклограммой работы следующих исполнительных механизмов: второго механизма перемещений 10, двухкоординатного сканирующего устройства 12 и устройства наведения в пространстве 15, проводит проверку работоспособности ФПУ 13 с БВК 14. Условием успешного проведения проверки работоспособности ФПУ 13 с БВК 14 является равенство сигналов, подаваемых на вход ФПУ 13 и снимаемых с выходов БВК 14, в пределах допускаемых отклонений величин. Правильность работы второго механизма перемещений 10 заключается в контроле достижения конечных положений по состоянию микропереключателей в соответствии с заданным интервалом времени по вводу и выводу оптической системы 9 из оптического тракта фокусирующей системы оптической головки 1. Правильность работы устройства наведения в пространстве 15 заключается в контроле достижения конечных положений за определенное время по состоянию микропереключателей с передачей информации в контроллер, определении диапазона перемещения по каждому из направлений Y и Z с последующей установкой каретки 41 механизма наведения в пространстве 15 в среднее положение по горизонту и вертикали. Правильность работы двухкоординатного механизма сканирования 12 заключается в совмещении центра отверстия блока калиброванных диафрагм 11 с оптической осью фокусирующей системы по срабатыванию оптронной пары, а также достижении блоком калиброванных диафрагм 11 заданных крайних положений зон сканирования по срабатыванию оптронной пары и микропереключателей по каждой из координат в отдельности. Результаты выполнения тестов отображаются на экране монитора 7 персонального компьютера 6 для предоставления пользователю.
В режиме прицеливания устройство работает следующим образом.
Модулированный пучок излучения проходит через оптическую головку 1 с формированием изображения ЛПУ в плоскости сетки 20 блока калиброванных диафрагм 11, точечное отверстие которого выделяет световой поток, который попадает на ФПУ 13 и преобразуется в электрический сигнал в виде напряжения U, отражающего интенсивность прошедшего светового потока и пропорционального освещенности Е точки ЛПУ, далее этот сигнал одновременно поступает в АЦП 2 для дальнейшей обработки и в БВК 14 для преобразования в значения команд в виде напряжений Uy, Uz. АЦП 2 производит преобразование этих напряжений Uy, Uz в соответствующие цифровые коды Кy, Kz, которые контроллер 3 передает в персональный компьютер 6 с последующим отображением на экране монитора 7 в виде числовых значений. Если значения кодов Ку, Kz отличны от нуля, то управляющей командой с персонального компьютера 6 в полуавтоматическом режиме через контроллер 3 БУ 4 приводит в движение устройство наведения в пространстве 15, которое осуществляет угловой разворот оси оптической головки 1 за счет линейного перемещения задней части оптической головки вдоль осей Y и Z относительно передней опоры, добиваясь нулевых значений Кy=0, Kz=0, являющихся информационным центром ЛПУ. Таким образом, режим прицеливания обеспечивает совмещение информационного центра ЛПУ с центром выбранного точечного отверстия блока калиброванных диафрагм 11.
При успешном завершении самотестирования и режима прицеливания заявляемое устройство готово для проведения режима измерения и регистрации параметров ЛПУ контролируемого информационного канала.
Измерение и регистрация параметров ЛПУ производятся при начальном и при конечном положениях компонентов панкратической системы тестируемого информационного канала. Изображение ЛПУ, соответствующее начальному положению компонентов панкреатической системы, формируется в фокальной плоскости фокусирующей системы с помощью телеобъектива 8, при этом оптическая система 9 выведена из оптического тракта. Изображение ЛПУ, соответствующее конечному положению компонентов панкреатической системы, формируется в фокальной плоскости фокусирующей системы с помощью телеобъектива 8 и оптической системы 9, которая вводится в оптический тракт вторым механизмом перемещения 10 по управляющей команде, поступающей с БУ 4. При этом размеры изображений для начального и конечного положений компонентов панкреатической системы информационного канала формируются одинаковыми, причем положение фокальной плоскости остается неизменным и совпадает с плоскостью сетки 20 блока калиброванных диафрагм 11. Двухкоординатное сканирующее устройство 12 по управляющей команде с БУ 4 осуществляет последовательное сканирование точечным отверстием сетки блока калиброванных диафрагм 11 в фокальной плоскости фокусирующей системы изображения ЛПУ по двум независимым направлениям Y и Z с определенным шагом дискретизации. Сканирование осуществляется из крайне левой или крайне правой границы поля сканирования, имеющего форму квадрата по координате Y при Z=Z0, и из крайне верхней (или крайне нижней) границы сканирования по координате Z при Y=Y0. Сканирование также может осуществляться под любым углом к осям Y, Z через точку со значениями Y0, Z0, причем если скорости сканирования по каждой из координат являются равными, то сканирование осуществляется под углом 45° к осям Y и Z. При этом получают последовательность оптических сигналов, соответствующих значениям освещенностей в заданных точках ЛПУ при сканировании по направлениям Y и Z. При каждом таком сканировании ФПУ 13 преобразует оптические сигналы в электрические сигналы в виде напряжений U с амплитудой, пропорционально зависящей от интенсивности светового потока, прошедшего через точечную диафрагму и отражающей распределение освещенности в ЛПУ при сканировании вдоль направлений Y и Z. Эта последовательность полученных с помощью ФПУ 13 значений амплитуд напряжений U, соответствующих распределению освещенности в ЛПУ вдоль указанных направлений (вдоль оси Y и вдоль оси Z или под углом 45° к осям Y и Z) с определенным шагом дискретизации, в соответствии с программой измерений поступает для последующей обработки на персональный компьютер 6. В заявляемом устройстве шаг дискретизации для каждой из координат составляет 5 мкм.
Распределение освещенности Е по ЛПУ получают на графике. Величину освещенности Е в (Вт· м2) в заданных точках ЛПУ рассчитывают по формуле:

Измеренные напряжения U связаны прямо пропорциональной зависимостью со значениями распределения освещенности Е по ЛПУ:
E=kU, (2)
где  - коэффициент пропорциональности;
- коэффициент пропорциональности;
τ - коэффициент светопропускания фокусирующей системы;
U - напряжение на выходе ФПУ, В;
V - вольтваттная характеристика ФПУ, В/Вт;
S - площадь точечной диафрагмы, мм;
L - дальность, соответствующая положению ЛПУ в пространстве изображений, м;
f - фокусное расстояние фокусирующей системы, м.
Значения S, f, τ определяются при метрологической аттестации оптической головки, значение V определяется по паспортным данным ФПУ.
Для получения истинных размеров ЛПУ на соответствующей дальности в пространстве изображений используется масштабный коэффициент β , определяемый отношением L/f и отражающий линейное увеличение изображения ЛПУ, создаваемого фокусирующей системой в ее фокальной плоскости. В основе работы заявляемого устройства лежит формирование изображения ЛПУ при работе информационного канала 16 в плоскости сетки блока калиброванных диафрагм 11 оптической головки 1. Заявляемое устройство позволяет осуществлять контроль параметров изображения ЛПУ с имитацией двух реальных дальностей L1, L2, соответствующих начальному и конечному положениям компонентов панкреатической системы контролируемого информационного канала, что обеспечивается оптической головкой с двумя значениями фокусных расстояний f1, f2, причем f1 соответствует фокусному расстоянию оптической головки без оптической системы 9, a f2 - с введенной оптической системой 9. Размеры изображения ЛПУ формируются одинаковыми для обеих дальностей L1, L2. При этом отношения L1/f1=L2/f2=β =const, где β -масштабный коэффициент фокусирующей системы. Оптическая головка 1 имеет два значения коэффициента светопропускания τ 1, τ 2, соответствующих короткофокусному режиму без оптической системы 9 и длиннофокусному - с введенной оптической системой 9. Значения τ 1, τ 2 определяются при метрологической аттестации заявляемого устройства, которые вводятся в персональный компьютер для выполнения расчетов коэффициента пропорциональности k для двух режимов работы фокусирующей системы - короткофокусного и длиннофокусного. Формула для определения коэффициента пропорциональности приобретает вид:

Персональный компьютер 6, используя программу математического обеспечения по формуле (1) и по полученным значениям амплитуд напряжений U, производит расчет значений Е по ЛПУ с получением последовательности значений Еi с регистрацией на экране монитора в виде графической записи осциллограмм распределения освещенности по ЛПУ при сканировании по направлениям Y и Z соответственно.
Аналоговый сигнал в виде напряжения U, полученный из модулированного пучка излучения, поступает из ФПУ 13 также и в БВК 14 для последующей обработки. БВК обрабатывает полученный сигнал U в точках нахождения ЛПУ в координаты в виде значений напряжений Uy, Uz, при сканировании по соответствующим направлениям Y, Z, отражающих линейное смещение положения точечной диафрагмы по отношению к координатам информационного центра ЛПУ Кy=0 и Кz=0 и координатам центра поля сканирования Y0, Zo. Координаты информационного центра ЛПУ Кy=0, Kz=0 и центра поля сканирования Yo, Zo, в котором установлена калиброванная диафрагма, предварительно в режиме прицеливания совмещаются и образуют единый центр. АЦП преобразовывает эти значения Uy, Uz в значения цифрового кода Кy, Kz. Таким образом на выходе АЦП получают последовательность значений Кy и Kz, соответствующих значениям координат ЛПУ при сканировании вдоль координат Y и Z соответственно. На экране монитора 7 поочередно отображаются кривые распределения: Kz при сканировании вдоль оси Z (Фиг.4) и Ку при сканировании вдоль оси Y (Фиг.4), которые являются пеленгационными характеристиками, соответствующими данному способу модуляции по двум взаимно перпендикулярным направлениям Y и Z.
Проводят серию измерений ЛПУ для начального и конечного положений компонентов панкреатической системы информационного канала, соответствующих короткофокусному режиму работы оптической головки с фокусом f1 и длиннофокусному режиму работы оптической головки 1 с фокусом f2, и получают в автоматическом режиме на мониторе усредненные значения распределения освещенностей с получением реальных кривых распределения освещенности в изображении ЛПУ для начального и конечного положений в отдельности при сканировании вдоль направлений Y и Z (см. фиг.4). Анализируют осциллограммы кривых распределения освещенности Е в ЛПУ и за его пределами и кривые пеленгационных характеристик Ку, Kz при сканировании по каждому из направлений Y и Z.
Приведенные совместно на фиг.4 графики распределения освещенности и пеленгационные характеристики по каждой из координат иллюстрируют возможность точного определения параметров ЛПУ: по графику пеленгационной характеристики Ку, Kz определяют размеры линейной и полной зон этих характеристик по каждой из координат. Кривые распределения освещенности и пеленгационной характеристик по каждой из координат являются взаимозависимыми, кривые пеленгационных характеристик отражают размер ЛПУ, а энергетическая кривая отражает распределение освещенности в этом ЛПУ. Определяют величины освещенностей Е в заданных точках ЛПУ, величину освещенности в информационном центре ЛПУ Е0, величины освещенностей по краям линейной зоны E1, величины освещенностей за пределами ЛПУ Е2 в соответствии с фиг.4. Таким образом, каждой точке пеленгационной характеристики ЛПУ со значениями Кyi, Kzi соответствует своя точка освещенности со значением Еi.
Анализ приведенных на графике осциллограмм распределения освещенности Е и пеленгационных характеристик Кy и Kz по каждой из координат позволяет определить реальные значения размеров радиусов характерных зон в изображении ЛПУ. Для проведения реальных измерений радиусов характерных зон ЛПУ проводят градуировку осей Y, Z, используя масштабный коэффициент β =L/f, с получением на графике, приведенном на фиг.4, вдоль оси абсцисс реальных значений rу, rz в соответствии с формулой, в метрах:

Характерные зоны ЛПУ обозначены на графике как радиусы линейной  и полной
и полной  зон. Сложение соответственно абсолютных значений радиусов линейной
зон. Сложение соответственно абсолютных значений радиусов линейной  и полной
и полной  зон ЛПУ дает возможность определить соответственно диаметр линейной
зон ЛПУ дает возможность определить соответственно диаметр линейной  и полной
и полной  зон ЛПУ. На основании измерений имеем значения
зон ЛПУ. На основании измерений имеем значения 
 которые соответствуют начальному и конечному положениям компонентов панкреатической системы информационного канала, что позволяет определить энергетическую рас ходимость [5] ЛПУ для разного масштаба изображений ЛПУ по следующей формуле, в радианах:
которые соответствуют начальному и конечному положениям компонентов панкреатической системы информационного канала, что позволяет определить энергетическую рас ходимость [5] ЛПУ для разного масштаба изображений ЛПУ по следующей формуле, в радианах:
Проводят сравнительный анализ реальных кривых усредненного распределения освещенности по ЛПУ, кривых пеленгационных характеристик контролируемого изделия с соответствующими эталонными кривыми и выделением характерных признаков подобия, а именно: энергетической освещенности в центре поля, на краях линейной зоны, за пределами ЛПУ, а также линейных размеров ЛПУ.
Далее, используя графики пеленгационных характеристик (см.фиг.4), определяют угловые коэффициенты γ у, γ z линейного участка пеленгационной характеристики (Ку=γ y·Y и Кz=γ z·Z), которые указывают на линейную зависимость значений Ку и Kz от величины смещения относительно информационного центра ЛПУ по двум направлениям Y и Z, рассчитывая по следующим формулам:

Угловые коэффициенты γ у, γ z линейного участка пеленгационной характеристики Ку, Kz также можно определить как сред нематематическое ожидание по следующим формулам:

где Kyi, Yi и Kzi, Zi - координаты i точки реальной пеленгационной характеристики вдоль соответствующих осей Y и Z; n - количество проводимых измерений (например, n=16).
Проводят сравнительный анализ полученных значений угловых коэффициентов линейности пеленгационных характеристик контролируемого информационного канала с эталонными и делают вывод о соответствии параметров модулированного лазерного излучения по каждой из координат.
Далее определяют динамическое изменение величины смещения оси распространения ЛПУ к оси информационного канала в реальном масштабе времени по величинам Ку, Kz на всей траектории движения компонентов панкреатической системы, при этом оптическая система 9 выведена из оптического тракта. Для этого посредством устройства наведения в пространстве 15 точечную диафрагму, установленную в центре поля сканирования с координатами Y0, Z0, совмещают с точными координатами информационного центра ЛПУ до получения значений Ку=0, Kz=0, фиксируют это положение и делают запись осциллограммы смещения информационного центра ЛПУ по изменению значений Ку, Kz при движении компонентов панкреатической системы из начального в конечное положение, получают закономерность динамического изменения величины смещения оси ЛПУ по двум координатам (т.е. смещение координат информационного центра ЛПУ) относительно оси информационного канала в реальном масштабе времени (см. фиг.5). Полученную последовательность значений Ку, Kz, характеризующих изменение величины смещения оси распространения ЛПУ относительно оси информационного канала, обрабатывают в персональном компьютере, используя аппарат математического обеспечения, производят вычисление величины рассогласования  ,
,  , оси распространения ЛПУ к оси информационного канала по следующей формуле:
, оси распространения ЛПУ к оси информационного канала по следующей формуле:
где  - абсолютное значение команды управления на краю линейной зоны для начального положения подвижных компонентов панкреатической системы,
- абсолютное значение команды управления на краю линейной зоны для начального положения подвижных компонентов панкреатической системы,
Ку(z) - текущее значение команды управления,
 - абсолютное значение размера радиуса линейной зоны для начального положения подвижных компонентов панкреатической системы.
- абсолютное значение размера радиуса линейной зоны для начального положения подвижных компонентов панкреатической системы.
Вышеперечисленные величины Ку(z) получают из последовательности значений при смещении оси распространения ЛПУ по каждой координате в отдельности, а величины  и
и  - измерены на графиках кривых пеленгационных характеристик Ку, Кz. Затем по значениям α y, α z, рассчитанным в соответствии с формулой (8), компьютер производит вычисление величины рассогласования оси распространения информационного центра ЛПУ к оси информационного канала по следующей формуле:
- измерены на графиках кривых пеленгационных характеристик Ку, Кz. Затем по значениям α y, α z, рассчитанным в соответствии с формулой (8), компьютер производит вычисление величины рассогласования оси распространения информационного центра ЛПУ к оси информационного канала по следующей формуле:

Персональный компьютер, используя программу математического обеспечения, по формуле (8), (9) производит расчет значений α y(z) и α с регистрацией на экране монитора в виде графической записи величины рассогласования оси распространения ЛПУ к оси информационного канала в зависимости от времени t, с.
Все вышеперечисленные параметры и характеристики ЛПУ, измеренные для информационного канала, сравниваются с аналогичными параметрами ЛПУ информационного канала эталонного изделия с выявлением признаков подобия, что тождественно определению параметров информационного канала. Таким образом, исследование характеристик и параметров ЛПУ контролируемого изделия позволяет судить о параметрах и характеристиках самого информационного канала.
Таким образом, заявляемое устройство обеспечивает не только возможность высокоточного контроля размеров ЛПУ информационного канала в начальном и конечном положениях компонентов панкреатической системы, а также обеспечивает контроль следующих параметров: изменение положения информационного центра ЛПУ при перемещении компонентов панкреатической системы, оценку величины угла наклона оси пучка излучения к оси информационного канала, т.е. определение величины рассогласования оси распространения ЛПУ на выходе информационного канала относительно его оптической оси.
Источники информации
1. Прицел прибор наведения 1К13. Техническое описание и инструкция по эксплуатации 1572.00.00.000ТО, ЦКБ “Пеленг”, 1987 г.
2. Патент RU 2108531, МПК F 41 G 7/00, 11/00. Прицел прибор наведения, опубл. 10.04.1998 г., бюл. №10.
3. Изделие ППН-Д СОЖ. Технические условия 7032.00.00.000ТУ, ОАО “Пеленг”, 1999 г., глава 3.
4. Патент RU 2091729, МПК G 01 J 1/04. Устройство для определения энергетической расходимости лазерного пучка, опубл. 27.09.1997 г. - прототип.
5. ГОСТ 26086-84 Методы измерения диаметра пучка и энергетической расходимости лазерного излучения. - М.: Издательство стандартов, 1985, с.2-8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ КОНТРОЛЯ ИНФОРМАЦИОННОГО КАНАЛА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2243581C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2007 |
|
RU2335728C1 |
| Способ контроля параметров лазерного канала управления прицельных комплексов и устройство диагностики для его осуществления | 2023 |
|
RU2824220C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО КАНАЛА УПРАВЛЕНИЯ | 2007 |
|
RU2350891C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2744040C1 |
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
Устройство для контроля параметров лазерного поля управления (ЛПУ) информационного канала включает фокусирующую систему, в фокальной плоскости которой установлен блок калиброванных диафрагм, снабженный первым механизмом перемещения, и фотоприемное устройство (ФПУ), аналого-цифровой преобразователь (АЦП), контроллер, блок управления (БУ), регистрирующий блок, устройство наведения в пространстве. Также введен блок выделения команд (БВК), фокусирующая система выполнена с переменным значением фокусного расстояния и с постоянным положением фокальной плоскости и содержит телеобъектив и оптическую систему, снабженную вторым механизмом перемещения, первый механизм перемещения выполнен в виде двухкоординатного сканирующего устройства, фокусирующая система с блоком калибровочных диафрагм, ФПУ и БВК выполнены в виде единой оптической головки, снабженной устройством наведения в пространстве, в качестве регистрирующего блока использован персональный компьютер с монитором. Технический результат - расширение функциональных возможностей устройства, повышение точности измерений и быстродействия контроля параметров ЛПУ. 5 ил.
Устройство для контроля параметров лазерного поля управления (ЛПУ) информационного канала, включающее оптически связанные фокусирующую систему, в фокальной плоскости которой установлен блок калиброванных диафрагм, снабженный первым механизмом перемещения, и фотоприемное устройство (ФПУ), выход которого соединен с первым входом аналого-цифрового преобразователя (АЦП), выход которого соединен с первым входом контроллера, блок управления (БУ), первый вход которого соединен с первым выходом контроллера, второй выход контроллера подключен к входу регистрирующего блока, первый, второй и третий выходы блока управления соединены соответственно с первым входом первого механизма перемещения, с первым и вторым входами устройства наведения в пространстве, отличающееся тем, что введен блок выделения команд (БВК), первый вход которого соединен с выходом ФПУ, первый и второй выходы БВК соединены соответственно со вторым и третьим входами АЦП, четвертый вход АЦП соединен с третьим выходом контроллера, фокусирующая система выполнена с переменным значением фокусного расстояния и с постоянным положением фокальной плоскости и содержит телеобъектив и оптическую систему, снабженную вторым механизмом перемещения, вход которого соединен с четвертым выходом БУ, а выход - со вторым входом контроллера, первый механизм перемещения выполнен в виде двухкоординатного сканирующего устройства, второй вход которого соединен с пятым выходом БУ, первый и второй выходы первого механизма перемещения соединены соответственно с третьим и четвертым входами контроллера, фокусирующая система с блоком калибровочных диафрагм, ФПУ и БВК выполнены в виде единой оптической головки, снабженной устройством наведения в пространстве, первый и второй выходы которого соединены соответственно с пятым и шестым входами контроллера, седьмой вход которого соединен с шестым выходом БУ, седьмой выход которого соединен с входом ФПУ и со вторым входом БВК, в качестве регистрирующего блока использован персональный компьютер с монитором, выход персонального компьютера соединен с восьмым входом контроллера.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ РАСХОДИМОСТИ ЛАЗЕРНОГО ПУЧКА | 1993 |
|
RU2091729C1 |
| Устройство для измерения импульсной мощности оптического излучения | 1980 |
|
SU918798A1 |
| Многоканальное устройство для анализа одномерных и двумерных световых распределений | 1989 |
|
SU1619314A1 |

