Изобретение относится к области измерения магнитных полей при проведении геофизических и космических исследований, разведке полезных ископаемых и др.
Известен способ определения элементов земного магнетизма (X, Y, Z, Т), основанный на вычислениях значений данных элементов по результатам измерения горизонтальной составляющей Н, углов склонения D и наклонения I [1]. Для измерения горизонтальной составляющей Н используют простой и точный кварцевый Н-магнитометр. Склонение D вычисляется как разность магнитного и астрономического азимутов какого-либо определенного направления, причем магнитный азимут измеряют посредством специальных деклинометров или магнитных теодолитов, а астрономический азимут определяют соответствующими геодезическими методами. Угол наклонения I измеряют с помощью стрелочных или индукционных инклиноторов.
Недостатком данного способа является необходимость применения различных по конструкции и по принципу действия измерительных приборов, отличающихся друг от друга метрологическими характеристиками, зависящими специфическим образом от многих возмущающих факторов (температура, атмосферное давление, квалификации оператора т.д.). Сложность и многозвенность самой методологии построения измерительного процесса также существенным образом сказывается на снижении эффективности рассматриваемого способа определения элементов земного магнетизма. В своей совокупности перечисленные недостатки и определяют невысокую точность рассматриваемого способа измерения в целом.
Известен способ для измерения трех взаимно перпендикулярных составляющих Ti (i=1, 2, 3) вектора напряженности Т магнитного поля трехкомпонентным феррозондовым магнитометром (ФМ), содержащим три взаимно ортогонально ориентированных магнитометрических датчика (МДi) [2]. Каждая компонента вектора напряженности магнитного поля измеряется соответствующим магнитометрическим датчиком данного ФМ. Величина модуля вектора напряженности магнитного поля определяется по результатам измерений трех компонент данного вектора путем вычисления следующей зависимости:
где U1, U2, U3 - результаты измерений электрических сигналов соответственно на выходах измерительных каналов (ИК]) магнитометрических датчиков МД1, МД2 и МД3; К1, К2, К3 - суммарные коэффициенты преобразования последовательно соединенных МДi и ИКi; U1/K1=T1, U2/К2=Т2, U3/К3=Т3 - соответствующие составляющие вектора напряженности магнитного поля Т.
Недостатком данного способа является необходимость использования трех магнитометрических датчиков, объективно имеющих неидентичные коэффициенты преобразования. Индивидуальные конструктивные и технологические особенности МД предопределяют и специфичность функционирования каждого из них. В этом случае наблюдается временной дрейф, а при работе ФМ в диапазоне температур имеется существенная погрешность из-за температурного дрейфа нулевого сигнала. Наличие трех измерительных каналов в ФМ усугубляет все перечисленные выше факторы и значительно снижает точность способа измерения.
Технической задачей изобретения является повышение точности, чувствительности и помехоустойчивости магнитных измерений.
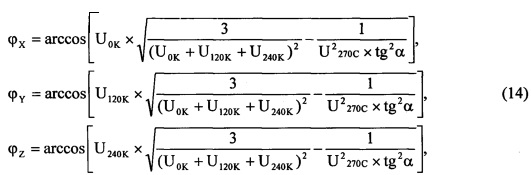
Поставленная техническая задача решается благодаря тому, что в способе измерения компонент и полного вектора напряженности геомагнитного поля при помощи ФМ, расположенного на неподвижной платформе в системе ориентации с прямоугольной системой координат {Χ, Y, Z}, векторные измерения осуществляют одним МД ФМ путем его равномерного вращения с угловой скоростью ω под углом α вокруг оси Ω с угловыми координатами αX=αY=αZ=α=arctg(√2), при этом координатные оси {Χ, Y, Z} системы ориентации платформы, на которой расположен МД, совмещены соответственно с географической системой координат {XG, YG ZG}, а векторные измерения проводятся при одновременном воздействии измеряемого магнитного поля Τ и направленного вдоль оси вращения Ω вспомогательного переменного магнитного поля Т0 с угловой частотой ω0, равной по величине угловой скорости ω МД, и синхронизированы с ней. Векторные измерения проводятся последовательно в моменты времени, когда ось чувствительности МД при его пространственном перемещении совпадает с соответствующими координатными осями Χ, Υ, Ζ системы ориентации платформы и с угловой координатой 270°, а параметры измеряемого полного вектора Τ напряженности геомагнитного поля определяют по результатам четырех измерительных процедур, реализуемых на соответствующих пространственных измерительных позициях МД, а именно при совмещении продольной оси МД с координатной осью X фиксируют величины синфазной U0C и квадратурной U0K составляющих суммарного сигнала U0 с выхода измерительного канала МД, при совмещении продольной оси МД с координатной осью Y фиксируют величину квадратурной составляющей U120K суммарного сигнала U120 с выхода измерительного канала МД, при совмещении продольной оси МД с координатной осью Z фиксируют величину квадратурных составляющих U240K суммарного сигнала U240 с выхода измерительного канала МД и при совмещении продольной оси МД с угловой координатой 270° фиксируют величину синфазной составляющей U270C суммарного сигнала U270 с выхода измерительного канала МД. Значения угловых координат полного вектора Τ определяют из соотношений



а величину модуля полного вектора Т напряженности геомагнитного поля определяют по формуле

Между совокупностью существенных признаков заявляемого способа измерение компонент и полного вектора напряженности геомагнитного поля и достигаемым техническим результатом существует причинно-следственная связь, а именно вращение МД ФМ вокруг оси с угловыми координатами αX=αY=αZ=α=arctg(√2) позволяет осуществить векторные измерения одним МД, что фактически устраняет погрешность неидентичности измерительных преобразователей и минимизирует временной дрейф параметров характеристики ФМ; в связи с тем, что исследуемые физические процессы и явления рассматриваются именно в географической системе координат, то совмещение координатных осей {X, Y, Z} системы ориентации платформы, на которой расположен ФМ, соответственно с географической системой координат {XG, YG, ZG} значительно упрощает решение задач геофизических и космических исследований, разведки полезных ископаемых, в частности повышается точность магнитной пеленгация локальных источников магнитного поля как геологического, так и техногенного происхождения; проведение векторных измерений на соответствующих пространственных позициях МД при одновременном воздействии измеряемого магнитного поля Т и направленного вдоль оси вращения Ω вспомогательного переменного магнитного поля Т0 с угловой частотой ω0, равной по величине угловой скорости ω МД и синхронизированной с ней, путем фиксации соответствующих синфазных и квадратурных составляющих суммарного сигнала с выхода МД создает условия для реализации инвариантности результатов этих измерений к изменениям коэффициентов функции преобразования измерительных каналов ФМ и к воздействию возмущающих факторов. Указанные отличия в своей совокупности обеспечивают существенное повышение точности и помехоустойчивости проводимых измерений.
Сравнение заявляемого технического решения с аналогами позволило установить соответствие критерию «новизна». При изучении известных технических решений в данной области техники признаки, отличающие заявляемое изобретение, не выявлены, что обеспечивает последнему соответствие критерию «существенные отличия».
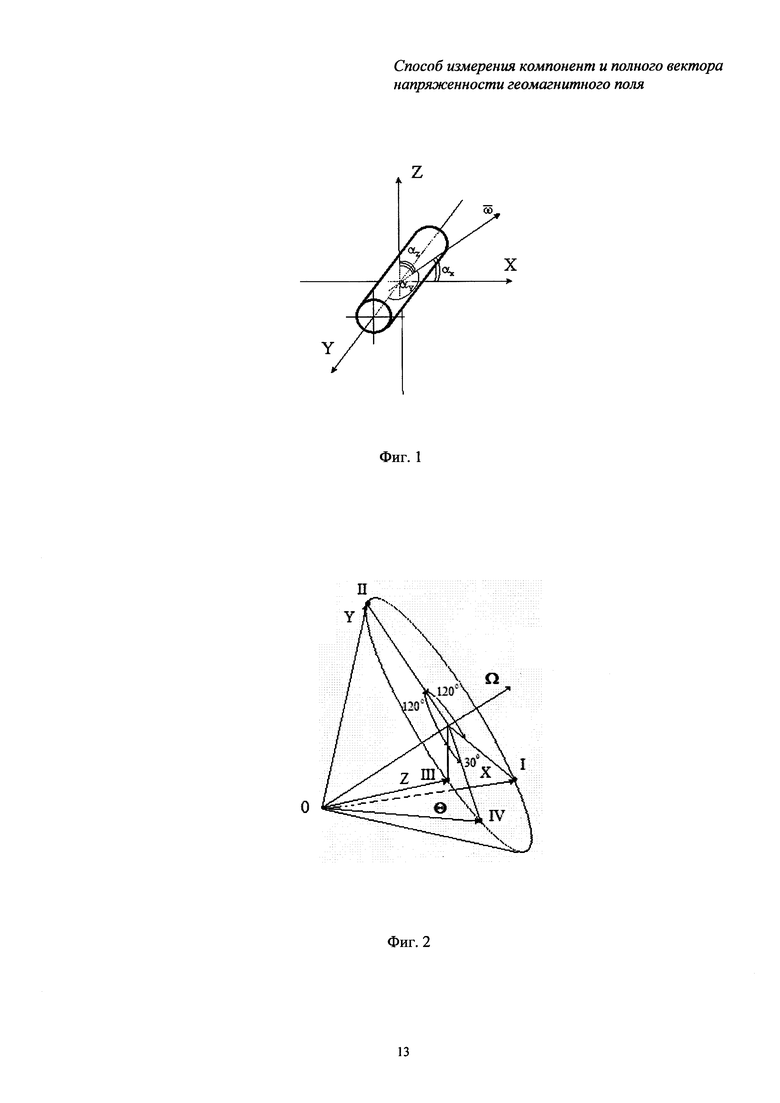
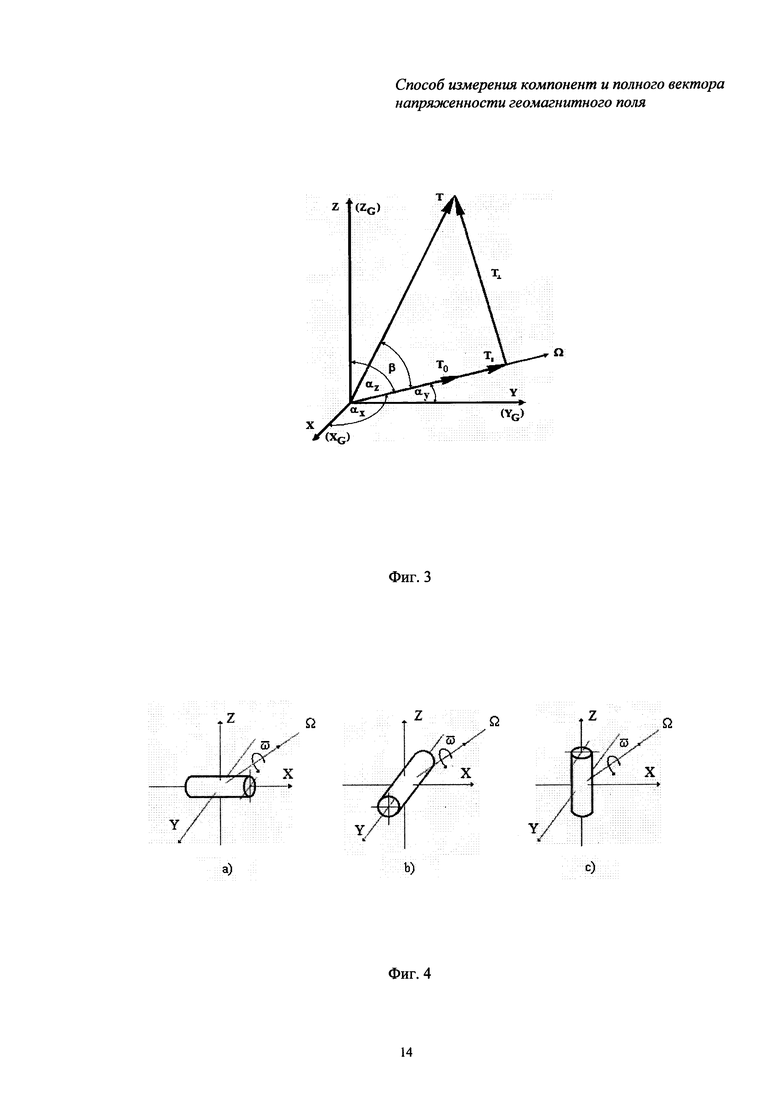
Способ измерения компонент и полного вектора напряженности геомагнитного поля иллюстрируется чертежами, где на фиг. 1 приведен пример расположения МД ФМ на одной из возможных измерительных позиций в системе ориентации неподвижной платформы; на фиг. 2 показаны расположение образующих Χ, Υ, Ζ, Θ на поверхности конуса вращения и пространственное распределение соответствующих им измерительных позиций; на фиг. 3 представлено пространственное расположение измеряемого вектора Τ напряженности геомагнитного поля и вспомогательного переменного магнитного поля Т0 в системе ориентации неподвижной платформы; на фиг. 4 показано расположение МД ФМ на соответствующих измерительных позициях при его равномерном вращении с угловой скоростью ω под углом α вокруг оси Ω с угловыми координатами αX=αY=αZ=α=arctg(√2).
Предлагаемый способ измерения компонент и полного вектора напряженности геомагнитного поля осуществляется следующим образом.
Для трехкомпонентной системы измерения параметров геомагнитного поля используется феррозондовый магнитометр (ФМ) с одним магниточувствительным датчиком (МД). При этом такой однокомпонентный ФМ расположен на неподвижной платформе, ориентированной в прямоугольной системе координат - {Χ, Y, Z}. Координатные оси системы ориентации платформы {Χ, Y, Z} совмещены с соответствующими координатными осями географической системы {XG, YG, ZG}, т.е. ось X ориентирована на север, Y - на восток, Ζ - направлена вертикально вниз по отвесу. МД феррозондового магнитометра имеет возможность равномерного вращения с угловой скоростью ω относительно неподвижной оси Ω с угловыми координатами αX=αY=αZ=α=arctg(√2) и своей осью чувствительности (продольная ось) расположен к оси вращения Ω под углом α (фиг. 1). Координатная ось X является образующей поверхности конуса, что обеспечивает, в силу указанных выше условий, принадлежность к этой поверхности также координатных осей Y и Ζ. В этом случае координатные оси Y и Ζ интерпретируются как результаты пространственного перемещения координаты X при повороте плоскости Χ0Ω относительно неподвижной оси Ω соответственно на углы 120° и 240° (фиг. 2). Кроме того, на поверхности рассматриваемого конуса дополнительно выделена образующая Θ, полученная путем пространственного перемещения координаты X при повороте плоскости Χ0Ω относительно неподвижной оси Ω соответственно на угол в 270° (фиг. 2).
На МД феррозондового магнитометра воздействует измеряемое геомагнитное поле Τ (естественное) и направленного вдоль оси вращения Ω вспомогательное переменное магнитное поля Т0 (искусственное) с угловой частотой ω0, равной по величине угловой скорости ω МД и синхронизированной с ней (фиг. 3).
Во время проведения измерений вектор измеряемого магнитного поля Т постоянен и неподвижен в пространстве и составляет угол β с осью Ω (фиг. 3), а параметры вспомогательного переменного магнитного поля Т0 являются изначально заданными и известными.
Угол β между векторами Ω{ΩX, ΩY, ΩZ} и Т{ТX, ТY, TZ} определяется как

В силу того, что αX=αY=αZ=α=arctg(√2), то следует:
ΩX=Ω=ΩZ=Ω×cosα.
Тогда выражение (1) (7.8) примет вид

Учитывая, что
выражение (2) трансформируется к виду

Вращающийся вокруг вектора Ω МД непрерывно перемещается в пространстве таким образом, что в результате его магнитная ось периодически с частотой ω совпадает с соответствующими географическими координатами.
На фиг. 4 представлены три таких рабочих пространственных положения ФД, которые он периодически занимает в результате своего пространственного перемещения.
Тогда, для каждой компоненты суммарного магнитного поля, направленной вдоль осей X, Y, Z и Θ, в общем случае соответствующие изменения можно записать в виде
где ϕX, ϕY, ϕZ и ϕΘ - начальные фазы, определяющиеся начальным положением вектора Т в системе координатных осей X, Y, Z и Θ.
С учетом ранее сделанных замечаний систему (4) уравнений представим следующим образом:


В рассматриваемом случае вектор измеряемого магнитного поля Т можно разложить на две компоненты: продольную Т⎢⎢ (вдоль оси вращения Ω) и поперечную Т⊥ (под прямым углом к оси вращения Ω), которые образуют дополнительный ортонормированный базис (ДОБ). Измеренная величина Т⎢⎢ зависит от величины смещения нуля компонент магнитометра и магнитного поля объекта. Поперечная компонента T⊥ не зависит от этих величин и измеряется абсолютно, а вспомогательное переменное магнитное поле Т0 фактически является продольной компонентой Т0⎢⎢ в рассматриваемом ДОБ.
Обозначим: Т⎢⎢=T×cosβ - составляющая вектора измеряемого магнитного поля Т, направленная вдоль оси Ω; T⊥=T×sinβ - составляющая вектора измеряемого магнитного поля Т, перпендикулярная к оси Ω.
Каждая компонента суммарного магнитного поля, направленная вдоль осей X, Y и Z, имеет «синусную» составляющую с амплитудой, равной проекции Т⊥, на соответствующую ось; постоянную составляющую, равную соответственно проекции Т⎢⎢, на соответствующую ось и «косинусную» составляющую с амплитудой, равной проекции Т0⎢⎢, на ту же ось.
Обозначив постоянную составляющую через А⎢, амплитуды переменных косинусной и синусой составляющих соответственно через В⎢⎢ и С⊥, можно записать:
Из ортогональности системы {X, Y и Z} следует:

Таким образом, в рассматриваемом случае возможно измерение трех компонент вектора Т и его модуля ⎢T⎢ с помощью одного и того же ФД, осуществляющего регулярное вращение относительно некоторой неподвижной оси Ω.
При переходе от анализа компонент магнитного поля в рассматриваемой системе координат с вращающимся в пространстве МД к анализу сигналов в выходной цепи измерительного канала ФМ следует, что при ближайшем рассмотрении системы уравнений (7) видно, что электрические сигналы, вырабатываемые МД, будут пропорциональны измеряемым компонентам поля, которые можно условно разделить на «синфазные» UC и «квадратурные» UK составляющие по отношению к вектору угловой скорости ω вращения относительно неподвижной оси Ω, а значит, и по отношению к возбуждающему вспомогательное переменное магнитное поля Т0 напряжению UB угловой частоты ω0. Данное утверждение следует из сформулированных ранее условий равенства и синхронизации угловой скорости вращения ω МД и угловой частоты изменения ω0 вспомогательного переменного магнитного поля Т0.
Поэтому, применяя два синхронных детектора (СД), опорное напряжение первого из которых настроено соответственно «синфазно» (фазовый сдвиг равен 0), а опорное напряжение второго - «квадратурно» (фазовый сдвиг равен π/2) по отношению к фазе возбуждающего напряжения UB, составляют следующую систему уравнений:
где S1 - коэффициент преобразования первого измерительного канала ФМ, включающего «синфазный» СД; S2 - коэффициент преобразования второго измерительного канала ФМ, включающего «квадратурный» СД; S1=S2=S.
После соответствующего амплитудного детектирования этих сигналов, реализованного посредством синхронных детекторов, на выходе ФМ в моменты прохождения ФД через пространственные позиции, расположенные соответственно на координатах X, Y, Z и Θ, будут выделяться огибающие несущего сигнала, для которых справедливы соотношения:
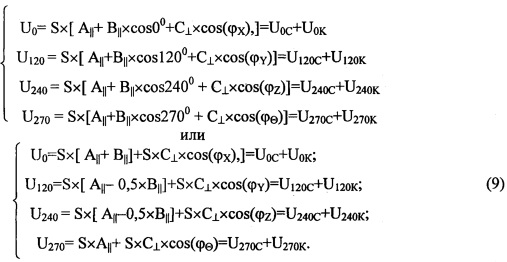
где U0, U120, U240, U270 - электрические напряжения сигналов на выходе МД при его вращении в моменты совпадения его продольной оси с соответствующими координатными осями X, Y, Z и Θ; U0С, U120C, U240С, U270C - электрические напряжения «синфазных» составляющих сигналов на выходе ФМ при вращении МД в моменты совпадения продольной оси МД с соответствующими координатными осями X, Y, Z и Θ; U0K, U120K, U240K, U270K - электрические напряжения «квадратурных» составляющих на выходе ФМ при вращении МД в моменты совпадения продольной оси МД с соответствующими координатными осями X, Y, Z и Θ.
Исходя из того, что
определяют коэффициенты преобразования первого и второго измерительного каналов ФМ:

Для упрощения математических преобразований введены следующие обозначения:
а=U0K/U270C; b=U120K/U270C с=U240K/U270C.
Тогда, с учетом (6) и (9):

Подставляя выражения (10) в уравнение (3), получают

Из уравнения (11) находят
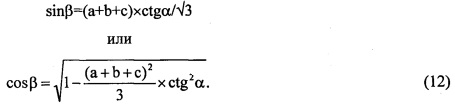
Из выражения (12) определяют:

Используя свойства тригонометрических преобразований,
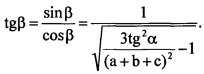
Исходя из того, что
подставив значение tgβ, определяют угловые координаты вектора T
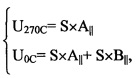
Из системы уравнений (8) после математических преобразований определяют величину модуля полного вектора Т напряженности геомагнитного поля:
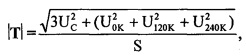
где UC=U0C=U120C=U240C; S - коэффициент преобразования МД, а именно

Исходя из выражений (14) и (15) заявленный способ измерения компонент и полного вектора напряженности геомагнитного поля отличается наличием совокупности взаимосвязанных действий: проведение последовательных позиционных измерений посредством одного МД в процессе его перемещения в пространстве определенным образом при непрерывном воздействии неизвестного измеряемого магнитного поля и заданного вспомогательного переменного магнитного поля. Весь процесс измерения состоит из четырех измерительных тактов, каждый из которых с определенной периодичностью реализуются на соответствующей пространственной измерительной позиции.
Первому измерительному такту, на котором регистрируются значения величин U0C и U0K, соответствует расположение ФД на первой измерительной позиции I, для которой характерно совпадение продольной оси ФД с географической координатой XG.
Второму измерительному такту, на котором регистрируется значение величины U120K, соответствует расположение ФД на второй измерительной позиции II, которая, в свою очередь, характеризуется совпадением продольной оси ФД с географической координатой YG.
Третьему измерительному такту, на котором регистрируется значение величины U240K, соответствует расположение ФД на третьей измерительной позиции III, которая характеризуется совпадением продольной оси ФД с географической координатой ZG.
Четвертому измерительному такту, на котором регистрируется значение величины U270C, соответствует расположение ФД на четвертой измерительной позиции IV, которая характеризуется совпадением продольной оси ФД с координатой осью Θ.
С учетом заданных параметров Т0 и cosα по результатам четырех измерительных тактов по соотношениям (14) и (15) определяются значения основных параметров полного вектора напряженности Т геомагнитного поля, т.е. его модуля ⎢T⎢ и угловые координаты ϕX, ϕY и ϕZ.
Анализ соотношений (14) и (15) показывает, что итоговый результат измерений не зависит от коэффициентов передачи измерительного канала, т.е. от дрейфа нуля, наклона и нелинейности характеристики измерительного преобразователя, а также от изменения указанных величин под действием окружающей среды и вследствие старения элементов, из которых выполнен измерительный преобразователь.
Экспериментальные исследования предлагаемого способа измерения компонент и полного вектора напряженности геомагнитного поля в реальных условиях подтвердили эффективность предлагаемого способа измерения и показали повышение точности в 1,5÷2 раза.
Использование предлагаемого способа измерения компонент и полного вектора напряженности геомагнитного поля позволит создавать недорогостоящие, надежные и высокоточные системы стационарного мониторинга состояния элементов земного магнетизма, ориентированные на решение ряда задач инженерной геофизики.
Источники информации
1. Логачев А.А., Захаров В.П. Магниторазведка. - Л.: Недра, 1973, с. 28-30.
2. Авторское свидетельство СССР №930176, МК G01R 33/02, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ И МОБИЛЬНОЕ ОКОНЕЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2526470C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| УЗЕЛ КАТУШЕК ПРИЕМНИКА ДЛЯ БОРТОВОЙ ГЕОФИЗИЧЕСКОЙ СЪЕМКИ С ПОДАВЛЕНИЕМ ШУМА | 2010 |
|
RU2552587C2 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНЫХ ФЕРРОЗОНДОВЫХ МАГНИТОМЕТРОВ | 2022 |
|
RU2793283C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| КВАНТОВЫЙ СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЁННОСТИ, НАПРАВЛЕНИЯ, ГРАДИЕНТА МАГНИТНОГО ПОЛЯ ЗЕМЛИ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2017 |
|
RU2680629C2 |
Изобретение относится к области измерения магнитных полей при проведении геофизических и космических исследований, разведке полезных ископаемых и др. Способ измерения компонент и полного вектора напряженности геомагнитного поля при помощи феррозондового магнитометра, расположенного на неподвижной платформе в системе ориентации с прямоугольной системой координат {X, Y, Z}, отличающийся тем, что векторные измерения осуществляют одним магниточувствительным датчиком (МД) феррозондового магнитометра (ФМ) путем его равномерного вращения с угловой скоростью ω под углом α к оси вращения Ω с угловыми координатами αX=αY=αZ=α=arctg( ). Технический результат – повышение точности и чувствительности магнитных измерений и помехоустойчивости. 5 з.п. ф-лы, 4 ил.
). Технический результат – повышение точности и чувствительности магнитных измерений и помехоустойчивости. 5 з.п. ф-лы, 4 ил.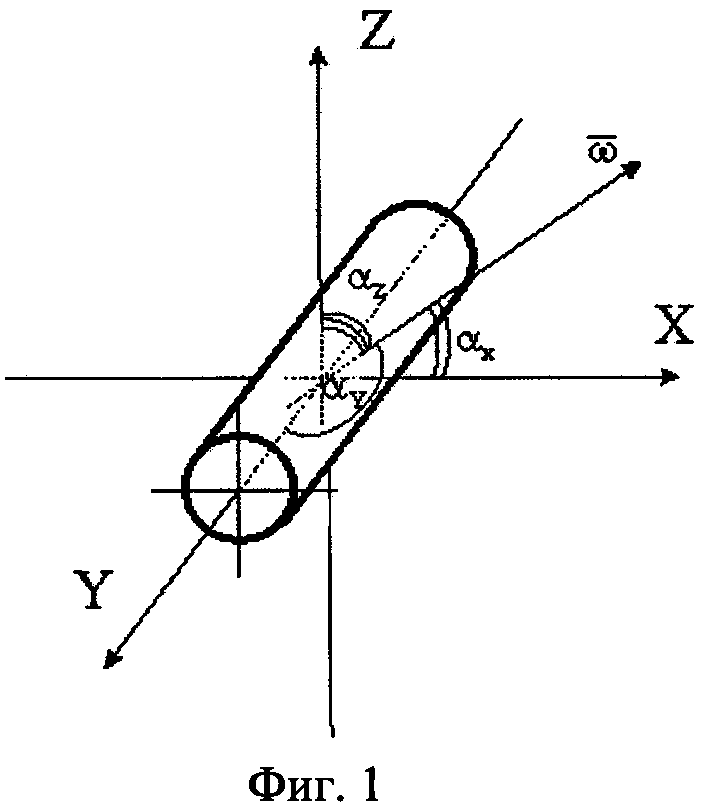
1. Способ измерения компонент и полного вектора напряженности геомагнитного поля при помощи феррозондового магнитометра, расположенного на неподвижной платформе в системе ориентации с прямоугольной системой координат {X, Y, Z}, отличающийся тем, что векторные измерения осуществляют одним магниточувствительным датчиком (МД) феррозондового магнитометра (ФМ) путем его равномерного вращения с угловой скоростью ω под углом α к оси вращения Ω с угловыми координатами αX=αY=αZ=α=arctg( ).
).
2. Способ измерения компонент и полного вектора напряженности геомагнитного поля по п. 1, отличающийся тем, что координатные оси {X, Y, Z} системы ориентации платформы, на которой расположен МД, совмещены соответственно с географической системой координат {XG, YG, ZG}.
3. Способ измерения компонент и полного вектора напряженности геомагнитного поля по п. 1, отличающийся тем, что векторные измерения проводятся при одновременном воздействии измеряемого магнитного поля Т и направленного вдоль оси вращения Ω вспомогательного переменного магнитного поля Т0 с угловой частотой ω0.
4. Способ измерения компонент и полного вектора напряженности геомагнитного поля по п. 1, отличающийся тем, что угловая частота ω0 вспомогательного переменного магнитного поля Т0 равна по величине угловой скорости ω МД и синхронизирована с ней.
5. Способ измерения компонент и полного вектора напряженности геомагнитного поля по п. 1, отличающийся тем, что векторные измерения проводятся последовательно в моменты времени, когда ось чувствительности МД при его пространственном перемещении периодически совпадает с соответствующими координатными осями X, Y, Z системы ориентации платформы и с угловой координатой 270°.
6. Способ измерения компонент и полного вектора напряженности геомагнитного поля по п. 1, отличающийся тем, что параметры измеряемого полного вектора Т напряженности геомагнитного поля определяют по результатам четырех измерительных процедур, реализуемых на соответствующих пространственных измерительных позициях МД, а именно: при совмещении продольной оси МД с координатной осью X фиксируют величины синфазной U0C и квадратурной U0К составляющих суммарного сигнала U0 с выхода измерительного канала МД; при совмещении продольной оси МД с координатной осью Y фиксируют величину квадратурной составляющей U120К суммарного сигнала U120 с выхода измерительного канала МД; при совмещении продольной оси МД с координатной осью Z фиксируют величину квадратурных составляющих U240К суммарного сигнала U240 с выхода измерительного канала МД и при совмещении продольной оси МД с угловой координатой 270° фиксируют величину синфазной составляющей U270C суммарного сигнала U270 с выхода измерительного канала МД, при этом значения угловых координат полного вектора Т определяют из соотношений



а величину модуля полного вектора Т напряженности геомагнитного поля определяют по формуле

| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |
| RU 2168188 C1, 27.05.2001 | |||
| Способ измерения слабых геомагнитных полей | 1991 |
|
SU1806391A3 |
| CN 104122596 A, 29.10.2014. | |||

