Предлагаемое изобретение относится к области радиотехники и может быть использовано в многопозиционных радиолокационных системах (МПРЛС) со сторонним источником подсвета для решения задачи обнаружения траекторий воздушных объектов.
Одним из вариантов такой системы является наземно-космическая многопозиционная радиолокационная система обнаружения воздушных объектов с источником подсвета - спутник на геостационарной орбите. [Лешко Н.А., Сахно И.В., Шалдаев С.Е. Пространственно-временная обработка сигналов в наземно-космической многопозиционной радиолокационной системе/сб. науч. тр. ВНПК «Проблемы создания и применения малых космических аппаратов и робототехнических комплексов в интересах вооруженных сил Российской Федерации». Т.1, Спб: ВКА имени А.Ф. Можайского. 2016. С. 144-157] (Фиг. 1).
В состав системы входят: спутник ретранслятор, расположенный на геостационарной орбите, усиливающий и излучающий сигнал в сторону поверхности земли, наземная подсистема, которая формирует зондирующие сигналы, излучаемые в направлении спутника, два приемных пункта и пункт совместной обработки информации. Излучаемые сигналы отражаются от целей, находящихся в зоне подсвета и поступают на вход устройств системы получения радиолокационной информации. В связи с удаленностью ретранслятора энергия сигнала, необходимая для обеспечения заданного отношения сигнал-шум, может быть получена в результате продолжительного когерентного накопления.
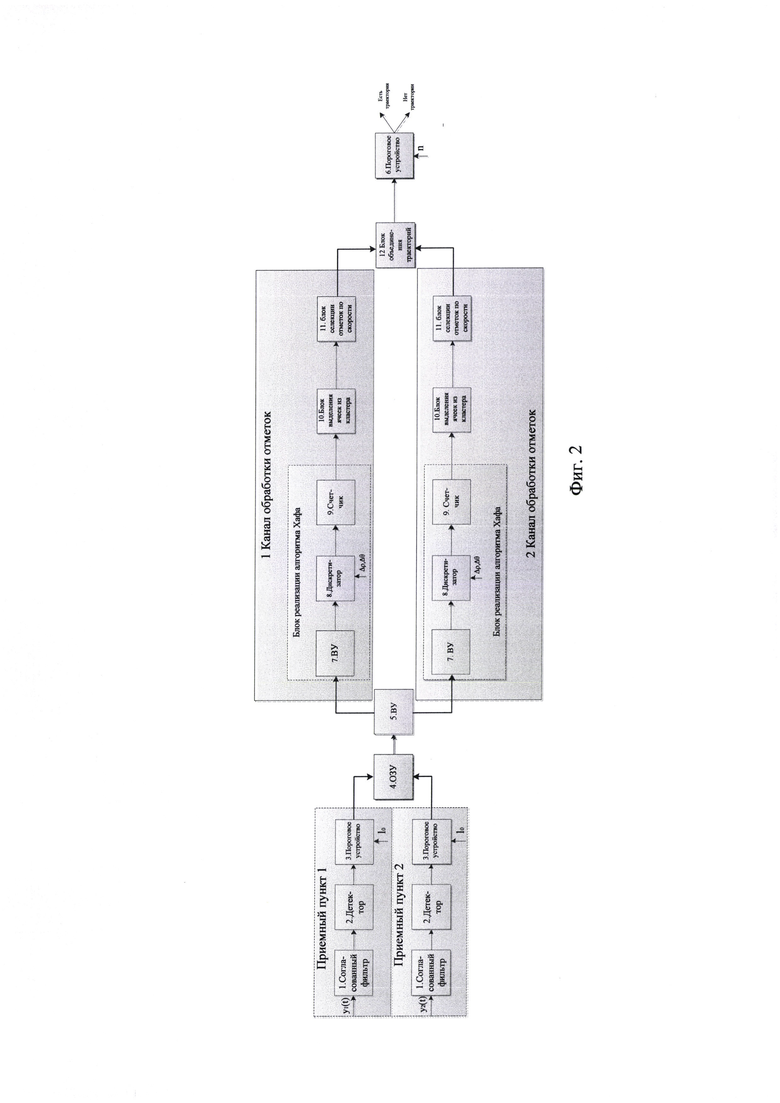
Наиболее близким устройством к заявленному изобретению является «Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа» [Ашурков И.С., Житков С.А., Захаров И.Н., Лешко Н.А., Цыбульник А.Н. Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа, патент на изобретение №2732916, 2020] (Фиг. 2).
В устройстве прототипе, применяется блочный алгоритм обнаружения прямолинейных траекторий на основе преобразования Хафа. Это позволяет накапливать радиолокационную информацию, поступившую за несколько циклов обзора, и устанавливать функциональную зависимость между отметками в интервале когерентного накопления. Суть алгоритма Хафа состоит в следующем - каждой точке в плоскости координат XY соответствует синусоида в плоскости параметров ρ, θ. Причем если точки в плоскости XY лежат на прямой с параметрами ρ', θ', то синусоиды в плоскости ρ, θ пересекутся в точке с координатами равными этим параметрам (Фиг. 3) [Коновалов А.А. Основы траекторной обработки радиолокационной информации. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2013 с. 81-85].
В качестве прототипа выбрана многоканальная система, содержащая в каждом канале согласованный фильтр, детектор, пороговое устройство, а в общей части системы последовательно соединенные оперативное запоминающее устройство, входы которого являются выходами пороговых устройств от каждого канала, вычислительное устройство, выходы которого являются входами каналов обработки отметок, каждый из которых решает задачу обнаружения траектории на плоскости, и состоит из последовательно соединенных блока реализации алгоритма Хафа, включающий в себя вычислительное устройство, дискретизатор и счетчик, блока выделения ячеек из кластера, блока селекции отметок по скорости, выход которого подключен к входу блока объединения траекторий и является выходом канала, и блок объединения траекторий, выход которого подключен к общему пороговому устройству [Ашурков И.С., Житков С.А., Захаров И.Н., Лешко Н.А., Цыбульник А.Н. Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа, патент на изобретение №2732916, 2020].
Структурная схема системы представлена на фиг.2.
Система является двухканальной (по числу приемных позиций в МПРЛС), каждый канал содержит:
1 - согласованный фильтр, выход которого подключен ко входу детектора 2;
2 - детектор, вход которого подключен к выходу согласованного фильтра 1, а выход к первому входу порогового устройства 3;
3 - пороговое устройство, вход которого подключен к выходу детектора 2, пороговый вход (второй) является внешним входом сигнала порогового уровня, а выход подключен к соответствующему входу ОЗУ 4.
Общая часть схемы содержит:
4 - оперативное запоминающее устройство на два входа, каждый из которых подключен к выходу порогового устройства соответствующего канала, а выход подключен ко входу вычислительного устройства 5;
5 - вычислительное устройство, вход которого соединен с выходом оперативно запоминающего устройства, а выход 1, 2 со входами каналов обработки отметок.
Каждый канал обработки отметок включает в себя:
7 - вычислительное устройство, входом которого является соответствующий выход вычислительного устройства 5, а выход подключен ко входу дискретизатора 8;
8 - дискретизатор, вход которого соединен с выходом вычислительного устройства 7, а выход с входом счетчика 9;
9 - счетчик, вход которого соединен с выходом вычислительного устройства 7, а выход подается на вход блока выделения ячеек 10;
10 - блок выделения ячеек, вход которого соединен с выходом счетчика 9, а выход с входом блока селекции отметок 11;
11 - блок селекции отметок, вход которого соединен с выходом блока выделения ячеек, а выход является выходом канала обработки отметок, который подключен к соответствующему входу блока объединения траекторий 12;
12 - блок объединения траекторий, 1 и 2 входы которого соединены с выходами соответствующих каналов обработки отметок, а выход подается на первый вход общего порогового устройства 6;
6 - общее пороговое устройство, первый вход которого подключен к выходу блока объединения траекторий 12, на второй вход подается пороговое значение, а выход является выходом системы.
В связи с тем, что модель движения воздушного объекта за время накопления описывается полиномом некоторой степени, а если при этом учесть, что время накопления выборки отметок не превышает единиц секунд, то траекторию цели можно с достаточной точностью аппроксимировать полиномиальной моделью второго порядка (Фиг. 4). Недостатком представленного прототипа является то, что в виду использования преобразования Хафа, решить задачу обнаружения воздушных объектов при совершении маневра, когда траектория движения отличается от прямолинейной, не представляется возможным. Для устранения этого недостатка предлагается в устройстве-прототипе реализовать блочный алгоритм обнаружения траекторий с применением алгоритма Радона [Хелгасон, С. Преобразование Радона [Текст]. - М.: Мир, 1983. - 152 с.], который обеспечивает обнаружение кривых второго порядка на изображении.
Целью изобретения является повышение показателей качества обнаружения криволинейных траекторий воздушных объектов. Для этого, в предлагаемом устройстве, параллельно реализован блок завязки криволинейных траекторий, действующий на основе преобразования Радона.
Цель изобретения достигается тем, что к известной многоканальной системе, содержащей в каждом канале согласованный фильтр, детектор, пороговое устройство, а в общей части системы - последовательно соединенные оперативное запоминающее устройство 4, входы которого являются выходами пороговых устройств от каждого канала, вычислительное устройство 5, выход которого является входом блока стробирования отметок 6, 1 и 2 выходы которого является входом каналов обработки отметок блока завязки прямолинейных траекторий, каждый из которых решает задачу выделения траектории на плоскости, и состоит из последовательно соединенных блока реализации алгоритма Хафа, включающий в себя вычислительное устройство 7, дискретизатор 8 и счетчик 9, блока выделения ячеек из кластера 10, блока селекции отметок по скорости 11, выход которого подключен к входу блока объединения траекторий 12, выход которого подключен к входу порогового устройства 13, дополнительно введен блок завязки криволинейных траекторий входом которого является 3 выход блока стробирования отметок 6, состоящий из последовательно соединенных блока реализации алгоритма Радона, включающего в себя вычислительное устройство 14, дискретизатор 15, счетчик 16, блока выделения ячеек из кластера 17, блока селекции отметок 18, порогового устройства 19, выход блоков завязки прямолинейных траекторий и блока завязки криволинейных траекторий является входом блока сглаживания траекторий 20, выход которого является выходом всего устройства.
Сопоставительный анализ с прототипом показывает, что заявляемая многоканальная система отличается тем, что в общую часть схемы введены блок стробирования отметок, блок завязки криволинейной траектории, включающий в себя вычислительное устройство, дискретизатор, счетчик, блок выделения ячеек из кластера, блок селекции отметок по скорости, пороговое устройство, блок сглаживания траекторий и указаны связи введенных элементов между собой и с другими элементами системы.
Таким образом, заявленная система соответствует критерию изобретения «новизна».
Так как при введении новых элементов в указанной связи, система проявляет новые свойства, что приводит к обнаружению объектов, движущихся по криволинейной траектории, а также к повышению показателей качества их обнаружения, то это позволяет сделать вывод, что предложенное техническое решение соответствует критерию «существенные отличия».
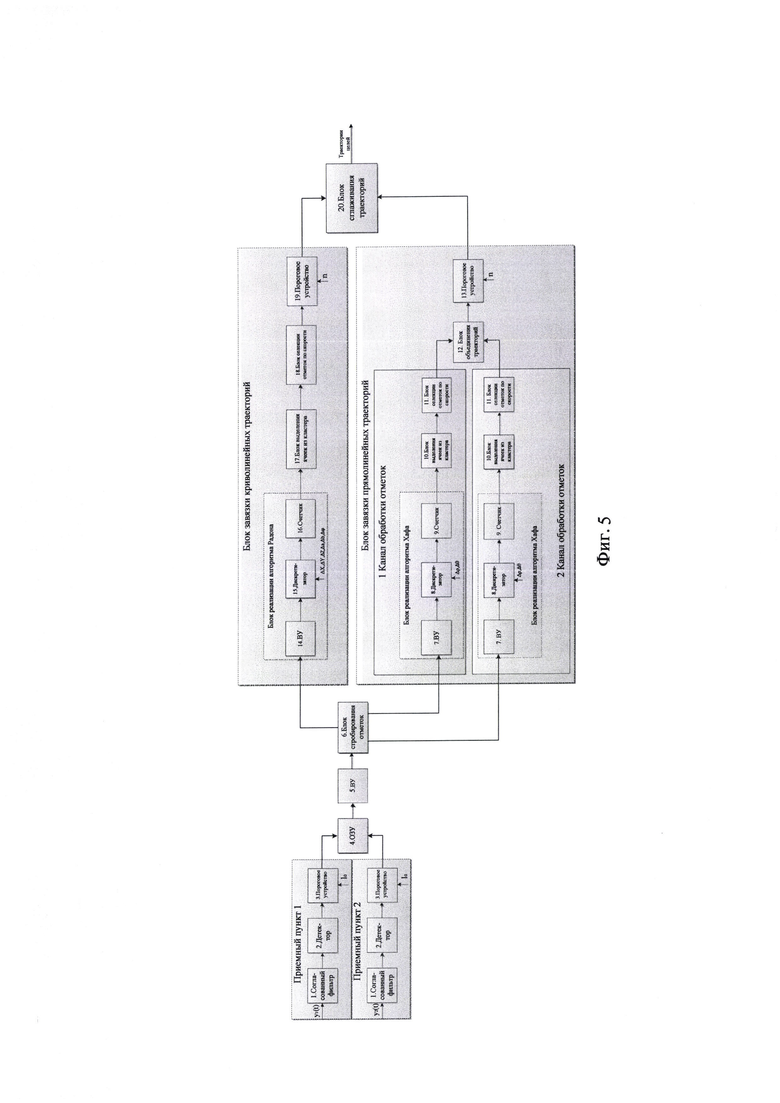
Структурная схема предлагаемого обнаружителя криволинейной траектории воздушного объекта в пространстве на основе параметрических преобразований приведена на фигуре 5.
Система является двухканальной (по числу приемных позиций в МПРЛС), каждый канал содержит:
1 - согласованный фильтр, выход которого подключен к входу детектора 2;
2 - детектор, вход которого подключен к выходу согласованного фильтра 1, а выход к первому входу порогового устройства 3;
3 - пороговое устройство, вход которого подключен к выходу детектора 2, пороговый вход (второй) является внешним входом сигнала порогового уровня, а выход подключен к соответствующему входу ОЗУ 4.
Общая часть схемы содержит:
4 - оперативное запоминающее устройство на два входа, каждый из которых подключен к выходу порогового устройства соответствующего канала, а выход подключен ко входу вычислительного устройства 5;
5 - вычислительное устройство, вход которого соединен с выходом оперативного запоминающего устройства, а выход с входом блока стробирования отметок 6;
6 - блок стробирования отметок, вход которого соединен с выходом вычислительного устройства, а выходы 1, 2 с входами каналов обработки отметок блока завязки прямолинейных траекторий, выход 3 с входом блока реализации параметрических преобразований блока завязки криволинейных траекторий;
20 - блок сглаживания траекторий, 1 и 2 входы которого соединены с выходами соответствующих блоков завязки траекторий, а выход является выходом системы.
Каждый канал обработки отметок блока завязки прямолинейных траекторий включает в себя:
7 - вычислительное устройство, входом которого является соответствующий выход вычислительного устройства 5, а выход подключен к входу дискретизатора 8;
8 - дискретизатор, вход которого соединен с выходом вычислительного устройства 7, а выход с входом счетчика 9;
9 - счетчик, вход которого соединен с выходом вычислительного устройства 7, а выход подается на вход блока выделения ячеек из кластера 10;
10 - блок выделения ячеек из кластера, вход которого соединен с выходом счетчика 9, а выход с входом блока селекции отметок по скорости 11;
11 - блок селекции отметок по скорости, вход которого соединен с выходом блока выделения ячеек из кластера, а выход является выходом канала обработки отметок, который подключен к соответствующему входу блока объединения траекторий;
12 - блок объединения траекторий, 1 и 2 входы которого соединены с выходами соответствующих каналов обработки отметок, а выход подается на первый вход порогового устройства 13;
13 - пороговое устройство, первый вход которого подключен к выходу блока объединения траекторий 12, на второй вход подается пороговое значение, а выход соединен с блоком сглаживания траекторий 20.
Блок завязки криволинейных траекторий включает в себя:
14 - вычислительное устройство, входом которого является соответствующий выход вычислительного устройства 14, а выход подключен к входу дискретизатора 15;
15 - дискретизатор, вход которого соединен с выходом вычислительного устройства 14, а выход с входом счетчика 16;
16 - счетчик, вход которого соединен с выходом дискретизатора 15, а выход подается на вход блока выделения ячеек из кластера 17;
17 - блок выделения ячеек из кластера, вход которого соединен с выходом счетчика 16, а выход с входом блока селекции отметок по скорости 18;
18 - блок селекции отметок по скорости, вход которого соединен с выходом блока выделения ячеек из кластера, а выход является выходом блока завязки криволинейных траекторий, который подключен к соответствующему входу порогового устройства 19;
19 - пороговое устройство, к первому входу которого подключен выход блока селекции отметок 18, на второй вход подается пороговое значение, а выход соединен с блоком сглаживания траекторий 20.
Система работает следующим образом: МПРЛС осуществляет излучение зондирующего сигнала в каждом цикле обзора. В каждой из приемных позиций после оптимальной линейной обработки (согласованной фильтрации) отраженных сигналов от воздушного объекта, производится сравнение с порогом в пороговом устройстве. Далее с выходов пороговых устройств информация по линии связи передается на вход оперативного запоминающего устройства. Если в элементе временного (дальностного) разрешения i-й позиции, произошло превышение порога, осуществляется накопление информации за все время накопления. В составе радиолокационной информации содержится информация о первичных координатах и времени обнаружения.
На вход вычислительного устройства 5 поступают массивы со значениями первичных координат и временем обнаружения,

где L - суммарная дальность, ε - угол места, индексы 1, 2 - номера позиции, k - номер цикла обзора (время обнаружения), n - номер отметки обнаруженной в цикле, который принадлежит интервалу 1…N, N - количество обнаруженных отметок за один цикл.
В результате объединения оценок первичных измерений с использованием эллипсо-угломерного метода (фиг.6), определяются координаты R2, βц воздушного объекта в сферической системе координат. [Лешко Н.А., Сахно И.В., Шалдаев С.Е. Пространственно-временная обработка сигналов в наземно-космической многопозиционной радиолокационной системе/сб. науч. тр. ВНПК «Проблемы создания и применения малых космических аппаратов и робототехнических комплексов в интересах вооруженных сил Российской Федерации». Т.1, Спб: ВКА имени А.Ф. Можайского. 2016. С. 144-157.]
Расчет координат осуществляется по следующим формулам:


R2, βц являются искомыми вторичными координатами отметок.
Далее, для всех элементов выборки истинных и ложных отметок осуществляется переход от сферической системы координат к декартовой:



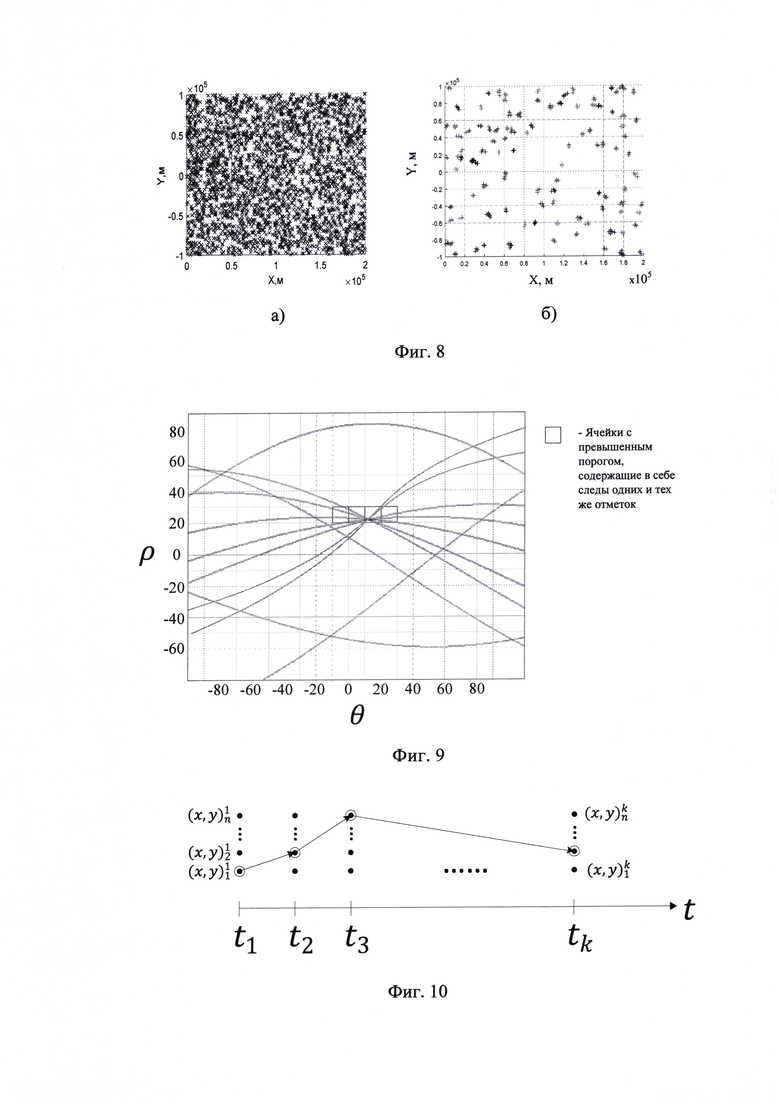
Координаты х, у, z всех отметок, полученные за все время обзора поступают на вход блока стробирования отметок, где вокруг отметки, принятой за начальную, выставляется строб захвата, в который должна попасть проверяемая отметка в случае, если она принадлежит цели. Согласно принятой концепции блочного построения алгоритма обнаружения траектории, стробирование осуществляется для всех отметок, поступающих за время накопления, не отождествленных с обнаруженными траекториями. За центр строба захвата принимается начальная отметка обнаруживаемой траектории, а его размер традиционно определяется с использованием априорно заданных минимальных и максимальных скоростей движения предполагаемых целей vmin и vmax. Такой строб захвата на плоскости имеет форму кольца (фиг.7), внутренний радиус которого равен Rmin = vmin(Δt), внешний Rmax = vmax(Δt), где Δt - разница во времени обнаружения отметок, Ok - отметка, обнаруженная на k-м обзоре.
В результате стробирования формируются группы отметок, пространственное расположение которых подчиняется условию

Все отметки, полученные за время обзора и результат обработки выборки после осуществления операции стробирования продемонстрированы на фигуре 8.
Сформированные после стробирования группы отметок селектируются по траекторным признакам. Под траекторными признаками понимается геометрическая форма траектории: кривая первого или второго порядка. Селекция отметок по траекторным признакам реализуется с помощью блока завязки прямолинейных траекторий на основе параметрических преобразований Хафа и криволинейных траекторий на основе параметрических преобразований Радона.
С блока стробирования отметок данные поступают на входы каналов обработки отметок блока завязки прямолинейных траекторий, где осуществляется выделение прямолинейных траекторий на плоскостях XY, YZ.
Отметки с преобразованными координатами в виде массивов

поступают на входы каналов обработки отметок блока завязки прямолинейных траекторий, в вычислительное устройство 7, где происходит расчет следов отметок в плоскости параметров ρ, θ для каждой отметки по формулам:


Следом отметки называют синусоиду в плоскости параметров [Коновалов А.А. Основы траекторной обработки радиолокационной информации. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2013 с. 83]. Следует отметить, что размеры рассматриваемой плоскости ограничиваются по оси параметра ρ, значениями в интервале между максимальной и минимальной дальностью обнаружения [Rmin…Rmax], а по оси θ в интервале (-90°…90°) на плоскости XY, (0°…90°) YZ, обеспечив тем самым обнаружение траекторий со всевозможными углами наклона. Далее полученные следы разбиваются на элементы разрешения в дискретизаторе. Элементы разрешения на плоскости ρ, θ представляют собой ячейки, которые имеют адреса (ρi,θi)XY, (ρi,θi)YZ, соответствующие их центрам. Размеры ячеек определяются, исходя из того, что ошибки оценивания координат представляют собой независимые нормальные случайные величины с нулевым математическим ожиданием и дисперсиями  . Используя правило «3σ» [Теория вероятностей: Учебник для студ. Вузов / Елена Сергеевна Вентцель. 9-е изд., стер. - М.:с Издательский центр «Академия». 2003. с. 120], размеры ячейки могут быть вычислены на основании следующих равенств:
. Используя правило «3σ» [Теория вероятностей: Учебник для студ. Вузов / Елена Сергеевна Вентцель. 9-е изд., стер. - М.:с Издательский центр «Академия». 2003. с. 120], размеры ячейки могут быть вычислены на основании следующих равенств:



Каждая ячейка связана со счетчиком, значение которого увеличивается на 1 в случае попадания в нее синусоид ρ(θ)XY, ρ(θ)YZ от разных отметок. В литературе совокупность счетчиков получила название аккумулятор [Коновалов А.А. Основы траекторной обработки радиолокационной информации. СПб.: Изд-во СПбГЭТУ «ЛЭТИ». 2013. с. 84]. Все счетчики настроены на определенное пороговое значение, при достижении которого попавшие в него отметки появляются на выходе. Выходом блока реализации алгоритма Хафа будут матрицы с отметками, принадлежащими одной прямой, следы которых попали в ячейку с превышенным порогом.

где (ρi,,θi) - адреса ячеек, на соответствующей плоскости, с превысившим порогом.
В блоке выделения ячеек из кластера исключаются те Ai, Bi, которые содержат в себе одинаковые отметки. Вследствие случайных ошибок измерений и наличия большого количества ложных отметок следует ожидать, что превышение порогового уровня будет наблюдаться в некотором множестве ячеек. Эти множества называются кластеры, они будут сосредоточены в окрестностях ячеек, в которых наблюдается максимальное значение (Фиг. 9).
Исключение ячеек происходит путем вычисления величины L, характеризующей степень различия между элементами матриц плоскостей XY или YZ. Алгоритм работает следующим образом:
Шаг 1. Из множества матриц Ai, Bi, попавших на вход блока, выбирается матрица А, В, у которой наибольшее количество элементов.
Шаг 2. Для каждой матрицы Ai, Bi (Ai ≠ A, Bi ≠ B) вычисляется


где  - количество различных элементов между матрицами А и Ai, В и Bi, |H(A)|,|H(B)| - количество элементов А, В, |H(Ai)|,|H(Bi)| - количество элементов Ai, Bi. Значения величин L сравниваются с порогом. В случае если порог не превышен, то принимается решение, что рассматриваемые пары ячеек содержит в себе похожие матрицы с большим количеством одинаковых элементов. В этом случае матрицы Ai, Bi обнуляются.
- количество различных элементов между матрицами А и Ai, В и Bi, |H(A)|,|H(B)| - количество элементов А, В, |H(Ai)|,|H(Bi)| - количество элементов Ai, Bi. Значения величин L сравниваются с порогом. В случае если порог не превышен, то принимается решение, что рассматриваемые пары ячеек содержит в себе похожие матрицы с большим количеством одинаковых элементов. В этом случае матрицы Ai, Bi обнуляются.
Шаг 3. Матрицы А, В исключаются из входного множества и поступают на выход блока.
Шаг 4. Происходит переход на шаг 1.
Алгоритм работает до тех пор, пока входное множество блока полностью не обнулится.
На вход блока селекции отметок по скорости поступают матрицы, соответствующие наборам отметок, принадлежащим одной прямой. Селекция отметок выполняется для выделения нескольких траекторий, лежащих на одной прямой, и фильтрации ложных отметок, попавших на ту же прямую. Все отметки, принадлежащие обнаруженной прямой, сгруппированы по времени. Далее рассчитываются расстояния между отметками, которые принадлежат разным временным ячейкам. Из всех отметок формируются группы (предполагаемые траектории) следующим образом: во-первых, группе может принадлежать только одна отметка из каждой временной ячейки (селекция по времени), во-вторых, расстояния, между отметками ячеек, не должны превышать максимально допустимого значения (фиг.10).
Если число отметок в группе превышает минимально допустимое количество, то по ней формируется отфильтрованная траектория. На выходе блока будут матрицы

соответствующие отфильтрованным траекториям целей на плоскостях XY, YZ. Индекс n здесь исчезает, в виду того что в масштабе одной траектории каждому моменту времени присваивается только одна отметка.
Далее, в блоке объединения траекторий происходит отождествление траекторий одной плоскости с траекториями другой путем вычисления величины S, характеризующей степень различия между наборами отметок на разных плоскостях по координате у в моменты времени t.
Для каждой ATi и BTi вычисляется

где  - количество различных отметок между наборами ATi и BTi, |H(ATi)| - количество отметок набора ATi, |H(BTi)| - количество отметок набора BTi. Если S (ATi, BTi) не превышает порога, принимается решение о соответствии отметок траектории ATi, отметкам траектории BTi. На выходе блока формируется матрица
- количество различных отметок между наборами ATi и BTi, |H(ATi)| - количество отметок набора ATi, |H(BTi)| - количество отметок набора BTi. Если S (ATi, BTi) не превышает порога, принимается решение о соответствии отметок траектории ATi, отметкам траектории BTi. На выходе блока формируется матрица

соответствующая траектории воздушного объекта в пространстве.
Далее элементы (ATi, BTi) поступают на устройство сравнения с порогом n, который равен минимальному количеству отметок, необходимых для формирования траектории.
В случае, если количество отметок одной траектории превысило значение порога, принимается решение об обнаружении траектории, и формируется прямолинейный отрезок, составленный из отметок с координатами х, у, z. Полученный массив данных поступает на вход блока сглаживания траекторий.
Также с блока стробирования отметок 6 данные поступают на вход блока завязки криволинейных траекторий в вычислительное устройство блока реализации алгоритма Радона, где осуществляется обнаружение траекторий воздушных объектов, описываемых полиномом второго порядка. В вычислительном устройстве производится параметрические преобразования данных массивов для плоскости XY при фиксированной высоте полета воздушного объекта Z = const.
Суть параметрического преобразования Радона поясняется на фигуре 11. Эллипсы с центрами в точках (х1, y1), (х2, у2), (х3, у3), (х4, у4), лежащих на эллипсе с координатами центра (х0, у0), пересекутся в этой же точке, если параметры всех эллипсов будут одинаковы. Аналитическое выражение параметрического преобразования задается уравнением

Для обнаружения цели с использованием параметрического преобразования, в вычислительном устройстве формируется пятимерный массив данных - аккумулятор (фигура 12). Размерность массива определяется параметрами, характеризующими положение эллипса на плоскости координат: X, Y - вектор возможных координат центров эллипса, ϕ - вектор возможных значений углов ориентации эллипса, а, b - вектора возможных значений полуосей эллипса (фигура 13).
Размерности квантованных векторов параметров эллипса X, Y (координаты центра) определяются возможным положением его центра и ограничены максимально возможным удалением центра от рассматриваемой отметки.

где xi, yi - координаты i-й отметки в анализируемой выборке, amax - максимальное значение вектора а. Размерность вектора ϕ определяется возможным направлением движения цели и лежит в интервале от 0° до 90°, обеспечивая все возможные ориентации эллипса на плоскости. Вектора значений полуосей а, b ограничены минимальным радиусом «маневра по направлению» предполагаемой цели

где vmin - минимальная скорость движения цели, nm - допустимые перегрузки при маневрировании цели и минимальным расстоянием, которое преодолевает цель за интервал накопления

где vmax - максимальная скорость движения цели; tн - время накопления отметок.
Формирование многомерного массива данных осуществляется путем объединения векторов параметров в общую многомерную матрицу.

где d, j, h, s, c - номера элементов векторов параметров.
Различные вариации значений параметров эллипса представляют элементы многомерного массива данных.
Таким образом в вычислительном устройстве 14 каждой отметке строится набор эллипсов с центром в точке xi, yi и параметрами ϕ, а, b. Данный массив данных поступает на вход дискретизатора 15.
Для осуществления дискретизации параметрического пространства в дискретизаторе 15 задаются максимально возможные шаги ΔХ, ΔY, Δϕ, Δа, Δb, обеспечивающие перекрытие стробами захвата рассматриваемой области пространства. Исходя из данных условий предложены выражения для расчета шага дискретизации векторов параметров X, Y, ϕ, а, b.

Плоскость XY разбивается на дискреты с координатами возможных центров искомых эллипсов Xd, Yj

Для каждой xi, yi формируется h локальных систем координат Xh, Yh, повернутых на углы, соответствующие значениям вектора ϕ с центрами в xi, yi. Координаты отметок пересчитываются в локальной системе координат по формуле

в матричном виде

Для каждого значения полуоси эллипса вектора а рассчитывается полуось b

В случае, если b - комплексное число, то данный эллипс не рассматривается, в противном случае значению b присваивается значение ближайшего элемента вектора b, и элемент массива с адресом (Xd, Yj, ϕh, as, bc) увеличивает свое значение на 1. В итоге каждая отметка в пространстве параметров представляется набором эллипсов с различными значениями параметров из векторов X, Y, ϕ, а, b. Таким образом, в счетчике, используя выражение преобразования Радона заполняется массив данных:

где X, Y - вектор координат центров эллипса, принимающих d и j значений от Xmin до Xmax и от Ymin до Ymax с шагом ΔХ и ΔY; ϕ - вектор углов ориентации эллипса, принимающих h значений от ϕmin до ϕmax с шагом Δϕ; а, b - вектора полуосей эллипса, принимающих s и с значений от amin до amax и от bmin до bmax с шагом Δа и Δb; xi, yi - координаты отметок в анализируемой выборке. При нахождении минимума аргумента дельта функции ячейки с индексами d, j, h, s, с увеличивают свое значение на 1.
В результате произведенных параметрических преобразований формируется многомерный массив, который имеет вид:
Элементы, мощности которых превысили порог n, выбираются для дальнейшего анализа

На выходе формируется массив данных, который содержит группу отметок, принадлежащих спроецированному на плоскость XY эллипсу с параметрами Xd, Yj - координаты центра искомого эллипса; ϕh - угол поворота между локальной и исходной системами координат (угол ориентации); as, bc - размеры полуосей искомого эллипса:
где m - количество отметок, обнаруженных в обзоре; k - количество обзоров.
В блоке выделения ячеек из кластера 17, уменьшается количество случаев превышения порога в соседних ячейках до одного случая. Исключение случаев ложного превышения порога происходит путем вычисления величины L, характеризующей степень корреляции между группами. Принцип работы блока выделения ячеек из кластера 17 аналогичен принципу работы блоков выделения ячеек из кластера 10.
В результате выполнения этапов параметрических преобразований и кластеризации ячеек количество отметок в выборке сокращается.
Оставшиеся отметки сгруппированы в предполагаемые траектории.
Каждая группа отметок принадлежит, спроецированному на плоскость XY, эллипсу с параметрами Xd, Yj - координаты центра искомого эллипса, ϕh - угол поворота между локальной и исходной системами координат (угол ориентации), as, bc - размеры полуосей искомого эллипса.
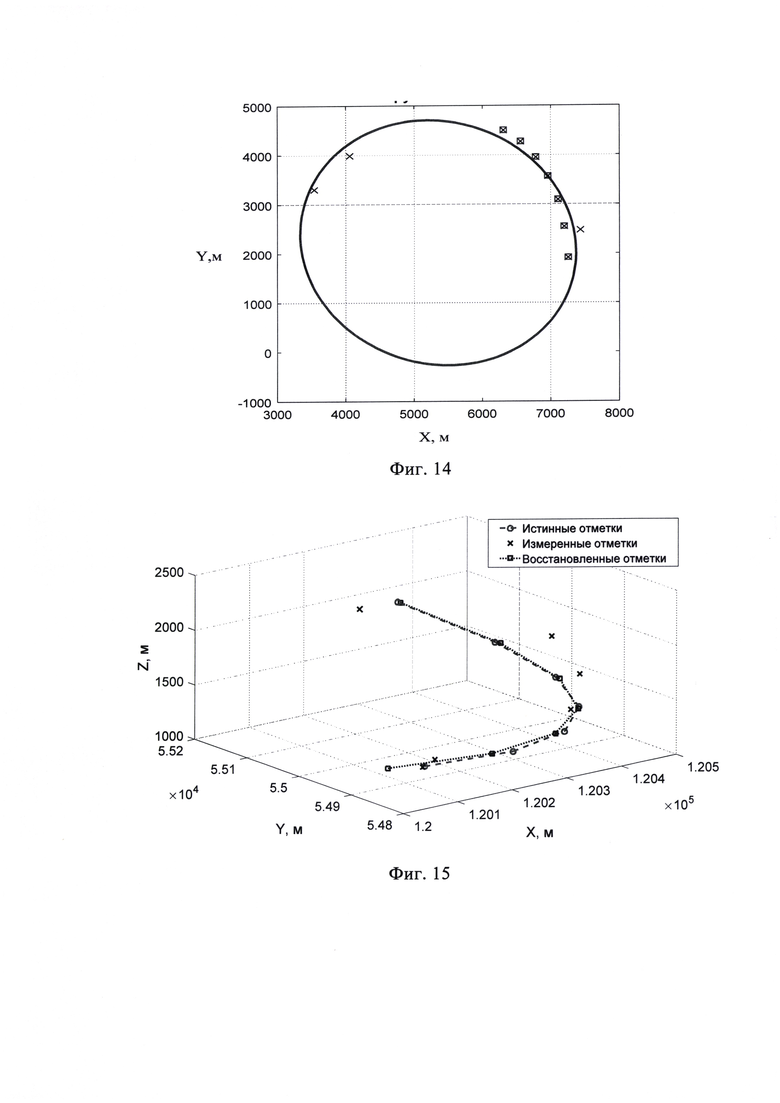
Массив Ai поступает на вход блока селекции по скорости 18. Где производится селекция для выделения нескольких траекторий, принадлежащих одному и тому же эллипсу, и фильтрация ложных отметок, попавших в выделенную группу (фигура 14). Все отметки группируются по времени (номер обзора в котором произошло обнаружение) и далее формируется набор гипотез с различными составами отметок. Из всего набора, с использованием алгоритма отождествления Витерби, выбирается гипотеза с наибольшим весом. Если число отметок в рассматриваемой гипотезе превышает минимально допустимое количество, то по ней формируется отфильтрованная траектория. На выходе блока селекции по скорости будут следующие матрицы:

соответствующие отфильтрованным траекториям целей. Индекс k здесь исчезает, в виду того что в масштабе одной траектории каждому моменту времени присваивается только одна отметка.
В пороговом устройстве количество отметок одной траектории сравнивается с порогом, заданным критерием обнаружения n из m, и на этом основании принимается решение об обнаружении или не обнаружении траектории воздушного объекта.
С выходов порогового устройства 19 блока завязки криволинейных траекторий и порогового устройства 13 блока завязки прямолинейных траекторий, массивы данных поступают на блок сглаживания траекторий 20. В нем, осуществляется оценка параметров траекторий с использованием метода наименьших квадратов.
Суть метода наименьших квадратов заключается в следующем: каждое измерение X представляется в виде суммы действительного значения вектора координат отметки х и вектора ошибок измерения координат w, являющийся случайной величиной с дисперсией, не меняющейся от измерения к измерению. Тогда

Оценки параметров ai определяются исходя из условия, что сумма квадратов ошибок измерений должна принимать минимальные значения, т.е.

Действительные значения координат цели выражаются в виде функции заданной моделью движения цели

Суммарная невязка между истинными и измеренными координатами записывается в виде

Для нахождения минимума невязки функция исследуется на экстремумы, для чего вычисляются и приравниваются к нулю частные производные, в результате получаются 3 системы из 3 алгебраических уравнений для каждой координаты

Решая системы уравнений, находятся коэффициенты ai, bi, ci, обеспечивающие минимум суммарной невязки (34).
Подставив рассчитанные коэффициенты ai, bi, ci в заданную модель движения цели, по измеренным координатам селектированных отметок восстанавливается траектория цели (фиг.15).
Следовательно, за счет применения метода наименьших квадратов на основе координат отметок на обнаруженной траектории формируются оценки координат и параметров движения цели. На выходе модели процесса обнаружения траектории средств воздушного нападения формируется набор параметров, описывающих движение цели в пространстве

которые передаются на вход сопровождения.
Оценим эффективность предлагаемого устройства по сравнению с прототипом. Оценка производилась по 2 показателям:
1. Вероятность обнаружения истинной траектории DИТ, которая вычисляется по формуле

где Mk - количество обнаруженных истинных траекторий,
Nk - количество истинных траекторий,
K - количество испытаний;
2. Среднее количество ложных траекторий NЛТ, рассчитываемое согласно выражения:

где  - количество ложных траекторий в k-м испытании
- количество ложных траекторий в k-м испытании
Достигаемый выигрыш оценивается путем сравнения показателей качества при использовании различных методов вторичной обработки радиолокационной информации. Оценка производилась, основываясь на допущении того, что комплексный обнаружитель должен обеспечить вероятность правильного обнаружения не ниже 0,9 при вероятности ложной тревоги не выше 10-6. Для этого сравнивались показатели при принятии решения об обнаружении цели в элементе разрешения, результаты обнаружения траекторий целей при использовании методов на основе серийных испытаний и параметрических преобразований Хафа и Радона.
Результаты обнаружения цели в элементе разрешения зависят только от энергетических характеристик принимаемых сигналов и поясняются кривыми обнаружения, представленными на фигуре 16.
Представленные зависимости показывают, что для достижения требуемых показателей качества обнаружения необходимо обеспечить превышение уровня полезного сигнала относительно шума порядка 15 дБ.
Для сравнения был выбран метод последовательного анализа - метод серийных испытаний, основанный на рекуррентных методах фильтрации, так как в настоящее время это наиболее известный и широко используемый в современных радиолокационных системах. В работе [Ашурков И.С., Житков С.А., Лешко Н.А., Тимошенко А.В. Методика обнаружения криволинейных траекторий воздушных целей с использованием параметрических преобразований // Радиотехника. 2021. Т.85. №8. С. 136-147] была проведена оценка показателей качества обнаружения траекторий метода серийных испытаний. Графики соответствующих зависимостей представлены на фигуре 17.
Анализ графиков на фигуре 17 показывает, что для качественной траекторной обработки необходимо, чтобы показатели качества первичной обработки удовлетворяли следующим условиям: D ≥ 0,8 и F ≤ 10-6. Требуемый для этого уровень отношения сигнал-шум составляет не менее 12 дБ.
Показатели качества обнаружения траектории цели, при использовании предлагаемого устройства, представлены на фигуре 18.
Представленные зависимости свидетельствуют, что для удовлетворения предъявляемым к качеству обнаружения требованиям необходимо обеспечить условие при первичной обработке D ≥ 0,8 при F ≤ 10-6, которое достигается при значении отношения сигнал-шум 8 дБ.
Таким образом, предлагаемое изобретение «Комплексный обнаружитель криволинейных траекторий воздушных объектов с использованием параметрических преобразований» позволяет обеспечивать выигрыш в 7 дБ, по сравнению с обнаружением целей в элементе разрешения, и 4 дБ, по сравнению с методом обнаружения траекторий целей на основе метода серийных испытаний (фигура 19).
Таким образом, предлагаемое устройство позволяет осуществить обнаружение траекторий воздушных объектов, движущихся по прямолинейным и криволинейным траекториям, при низких соотношениях сигнал-шум за счет использования информации, накопленной в течении заданного времени и достичь повышения показателей качества обнаружения криволинейных траекторий воздушных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа | 2019 |
|
RU2732916C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С МОНОИМПУЛЬСНОЙ ПЕЛЕНГАЦИЕЙ ОТ МНОГОКРАТНЫХ ОТВЕТНО-ИМПУЛЬСНЫХ ПОМЕХ | 2023 |
|
RU2815879C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2019 |
|
RU2710202C1 |
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777652C1 |
| СПОСОБ БЕССТРОБОВОГО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2551356C1 |
| Способ защиты радиолокационной станции от воздействия пассивных помех, обусловленных магнитно-ориентированными неоднородностями электронной концентрации ионосферы | 2016 |
|
RU2616969C1 |
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |






Изобретение относится к области радиотехники и может быть использовано в многопозиционных радиолокационных системах со сторонним источником подсвета. Техническим результатом является обеспечение обнаружения прямолинейных и криволинейных траекторий воздушных объектов. Заявленный комплексный обнаружитель является многоканальным и содержит в каждом канале согласованный фильтр, детектор и пороговое устройство. Общая часть системы содержит оперативное запоминающее устройство, вычислительное устройство, блок стробирования отметок, блок завязки прямолинейных траекторий, включающий два канала обработки отметок, каждый из которых включает в себя блок реализации алгоритма Хафа, предназначенный для обнаружения воздушных объектов, движущихся по прямолинейной траектории, блок завязки криволинейных траекторий, который включает в себя блок реализации алгоритма Радона, предназначенный для обнаружения воздушных маневрирующих объектов (движущихся по криволинейной траектории) и блок сглаживания траекторий. 19 ил.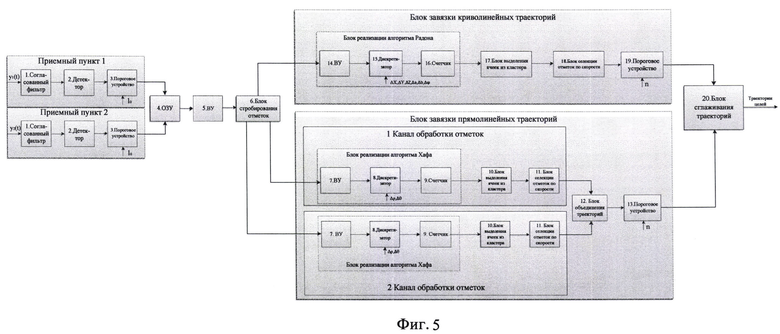
Комплексный обнаружитель целей в многопозиционной радиолокационной станции, содержащий в каждом канале последовательно соединенные согласованный фильтр 1, детектор 2, пороговое устройство 3, второй вход которого является внешним входом сигнала порогового уровня, в общей части системы оперативное запоминающее устройство (ОЗУ) 4, вычислительное устройство 5, блок стробирования отметок 6, блок завязки прямолинейных траекторий, включающий два канала обработки отметок, блок объединения траекторий 12 и пороговое устройство 13, выход которого подключен на вход блока сглаживания траекторий 20, блок завязки криволинейных траекторий, включающий в себя блок реализации алгоритма Радона, включающий вычислительное устройство 14, дискретизатор 15, счетчик 16, блок выделения ячеек из кластера 17, блок селекции отметок по скорости 18, и пороговое устройство 19, блок сглаживания траекторий 20, причем 1 и 2 входы ОЗУ 4 соединены с выходами пороговых устройств 1 и 2 приемных каналов, а выход соединен со входом вычислительного устройства 5, выход которого соединен со входом блока стробирования отметок 6, выходы которого являются входами 1 и 2 каналов обработки отметок блока завязки прямолинейных траекторий, каждый из которых состоит из последовательно соединенных блока реализации алгоритма Хафа, включающего в себя последовательно соединенные вычислительное устройство 7, дискретизатор 8, счетчик 9, блока выделения ячеек 10, блока селекции отметок 11, выходы которых подключены к 1 и 2 входам блока объединения траекторий 12, выход которого подключен на вход порогового устройства 13, выход которого соединен с входом блока сглаживания траекторий 20, а также входом блока завязки криволинейных траекторий, включающего в себя блок реализации алгоритма Радона, состоящий из последовательно соединенных вычислительного устройства 14, дискретизатора 15, счетчика 16, выход которого является входом блока выделения ячеек 17, выход которого соединен с входом блока селекции отметок 18, выход которого является входом порогового устройства 19, выход которого подключен на вход блока сглаживания траекторий 20, выход которого является выходом обнаружителя.
| Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа | 2019 |
|
RU2732916C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2556710C1 |
| Комплексная система обнаружения в многопозиционной радиолокационной станции | 2016 |
|
RU2608556C1 |
| Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления | 2016 |
|
RU2630252C1 |
| СПОСОБ КОМБИНИРОВАННОГО СГЛАЖИВАНИЯ КООРДИНАТ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2556024C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| CN 102023294 A, 20.04.2011 | |||
| CN 112147609 A, 29.12.2020 | |||
| US 5762292 A, 09.06.1998. | |||

