Область техники, к которой относится изобретение
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для обнаружения малоразмерных, движущихся прямолинейно, воздушных объектов в условиях действия помех.
Уровень техники
Известен способ радиолокационного обнаружения воздушного объекта в направлении зоны обзора, при котором в это направлении излучают зондирующий сигнал, принятый затем из того же направления, отраженный сигнал в каждой дискрете по дальности сравнивают с порогом обнаружения, при превышении которого принимают решение об обнаружении воздушного объекта (Справочник по радиолокации. Под ред. М. Сколника. Пер. с англ. Под ред. К.Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки, М., Сов. радио, 1976, с. 180, Обнаружитель с фиксированным объемом выборки). В известном способе решение об обнаружении воздушного объекта принимается по результатам одного зондирования, поэтому любой сигнал, близкий по структуре к излученному сигналу, превысивший порог обнаружения, считается воздушным объектом. Это является недостатком известного способа.
Известен способ радиолокационного обнаружения воздушных объектов, включающий согласованную пространственную обработку сигнала, согласованную фильтрацию одиночных импульсов, амплитудное детектирование импульсов и межпериодное некогерентное накопление импульсов пачки (Информационные технологии в радиотехнических системах: Учебное пособие / В.А. Васин, И.Б. Власов, Ю.М. Егоров и др.; Под ред. И.Б. Федорова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2003). Обнаружение малоразмерных (слабоотражающих) воздушных объектов при таком способе возможно за счет увеличения числа некогерентно накапливаемых импульсов, то есть общей протяженности пачки импульсов, что предполагает нежелательное снижение темпа обзора. Кроме того, энергетическое накопление сигналов, отраженных от воздушного объекта, ограничено временем нахождения воздушного объекта в элементе разрешения. Это и является главным недостатком данного способа.
Наиболее близкий способ обнаружения воздушного объекта включает временное сжатие принимаемого эхо-сигнала с помощью согласованной фильтрации, выделение огибающей сигнала и последующее ее сравнение с порогом обнаружения q0, при превышении которого принимается решение об обнаружении воздушного объекта (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., «Сов. радио», 1970, с. 110-114). Порог обнаружения q0 устанавливают исходя из заданного уровня ложных тревог.
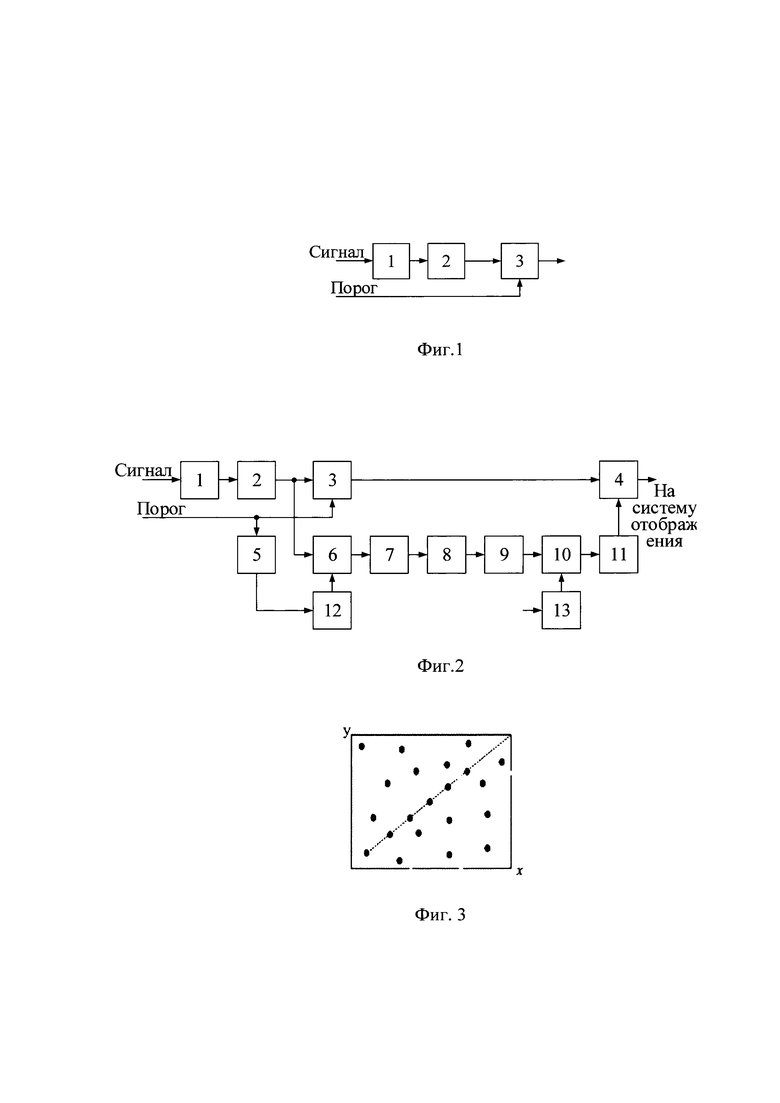
Наиболее близкое устройство (фиг. 1) содержит последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, пороговое устройство 3 (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., «Сов. радио», 1970, с. 114, рис. 3.19).
Наиболее близкие технические решения позволяют эффективно обнаруживать зондирующие сигналы, отраженные от воздушных объектов, и подавлять импульсные помехи в виде сигналов, не согласованных с фильтром. Однако в наиболее близком способе уровень порога обнаружения оптимизирован для достижения максимальной вероятности обнаружения воздушных объектов при допустимом числе ложных тревог и минимальных затратах времени (энергии) в каждом направлении зоны обзора при использовании известных зондирующих сигналов. Сигнал, превысивший порог принимается за воздушный объект. При обнаружении слабых сигналов от малоразмерных (слабоотражающих) воздушных объектов ошибочно принятое решение об отсутствии воздушного объекта в элементе разрешения приводит к его пропуску в нескольких циклах обзора, завязка трассы и формирование траекторной информации производится с запозданием. Сигналы же от воздушных объектов, движущихся на гиперзвуковых скоростях, не будут попадать в строб захвата, вследствие чего завязка трасс по таким сигналам в РЛС происходить не будет. Это является недостатком наиболее близких технических решений.
Раскрытие изобретения
Решаемой задачей (техническим результатом) является увеличение дальности обнаружения и дальности завязки трассы как для малоскоростных так и для гиперскоростных малоразмерных воздушных объектов в условиях наличия помех.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения воздушных объектов, включающем согласованную фильтрацию принимаемого сигнала с последующим выделением огибающей сигнала и сравнением ее в каждой дискрете по дальности с порогом обнаружения, согласно изобретению, вводится дополнительный канал обработки радиолокационной информации, включающий процесс сравнения сигнала с порогом обнаружения первого этапа обнаружения, который меньше порогового уровня канала прототипа, аналого-цифровое преобразование всех пройденных сигналов, их межобзорное накопление, преобразование и хранение результатов в накопителе Хафа, дальнейшее сравнение результатов преобразования с пороговым устройством второго этапа обнаружения, по результатам которого формируются трассы всех воздушных объектов, сигналы которых прошли порог первого этапа обнаружения дополнительного канала, что одновременно является фактом обнаружения воздушных объектов.
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения воздушных объектов, содержащем последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, пороговое устройство 3, согласно изобретению, введен дополнительный канал обнаружения, состоящий из порогового устройства первого этапа обнаружения 6, блока АЦП и хранения первичной информации 7, блока реализации алгоритма Хафа 8, блока хранения результатов работы алгоритма Хафа 9, порогового устройства второго этапа обнаружения 10, блока формирования трассы дополнительного канала 11, логического элемента «ИЛИ» 4, блока выбора коэффициента для пороговой величины первого этапа обнаружения 5, блока хранения пороговой величины для первого этапа обнаружения 12, блока хранения пороговой величины для второго этапа обнаружения 13.
Сущность предложенного способа заключается в следующем.
С помощью РЛС осуществляют обзор контролируемого пространства и обнаружение воздушных объектов по результатам первичной обработки радиолокационной информации в основном канале обнаружения. Одновременно с этим в дополнительном канале обнаружения устанавливается порог, обеспечивающий обнаружение слабых эхо-сигналов от малоразмерных воздушных объектов. Вместе с эхо-сигналами от воздушных объектов будут обнаруживаться и сигналы от помех, однако использование известного алгоритма Хафа широко используемого в обработке изображений, позволяет выявлять прямолинейные зависимости, образованные в ходе анализа накопленной межобзорной информации от движения воздушных объектов, исходя из априорной модели их движения. Эхо-сигналы, отраженные от воздушных объектов от периода к периоду обзора, будут выстраиваться последовательно в линию, в то время как помехи будут появляться хаотично в разных элементах разрешения. Результаты сравнения с первичным порогом, полученные в каждом обзоре, подвергаются преобразованию Хафа, формирующее экстремумы в пространстве траекторных параметров, при этом, чем больше сигналов выстроилось последовательно в линию, тем экстремум больше. Для принятия решения об обнаружении воздушного объекта необходимо применить пороговую обработку. Полученные после пороговой обработки координаты точек в пространстве параметров будут соответствовать траекторным параметрам воздушного объекта в зоне обнаружения. Применяя операцию обратного проецирования точек из пространства параметров, происходит восстановление траектории движения воздушного объекта за все время наблюдения. Пороги подбираются исходя из требуемого уровня ложных тревог и вероятности правильного обнаружения.
Изобретения иллюстрируются следующими чертежами:
Фиг. 1 - наиболее близкое устройство радиолокационного обнаружения целей, реализующее наиболее близкий способ.
Фиг. 2 - заявляемое устройство обнаружения малоразмерных воздушных объектов, реализующее заявляемый способ.
Устройство обнаружения малоразмерных воздушных объектов, реализующее заявляемый способ, содержит (фиг. 2) два канала: основной, реализующий способ обнаружения прототипа и дополнительный реализующий предлагаемый способ. Устройство содержит последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, первый вход порогового устройства 3 основного канала, выход которого соединен первым входом схемы «ИЛИ» 4, выход которой соединен с системой отображения, при этом выход детектора огибающей сигнала 2 является также первым входом порогового устройства первого этапа обнаружения 6 дополнительного канала, выход которого последовательно соединен с блоком АЦП и хранения первичной информации 7, блоком реализации алгоритма Хафа 8, блоком хранения результатов работы алгоритма Хафа 9, первым входом порогового устройства второго этапа обнаружения 10, блоком формирования трассы дополнительного канала 11, вторым входом логического элемента «ИЛИ» 4, одновременно с тем на второй вход порогового устройства 3 основного канала поступает уровень порога, который также является входом блока выбора коэффициента для пороговой величины первого этапа обнаружения 5 дополнительного канала, выход которого является входом блока хранения пороговой величины для первого этапа обнаружения 12, его выход соединен с вторым входом порогового устройства первого этапа обнаружения 6 дополнительного канала, задаваемая пороговая величина хранится в блоке хранения пороговой величины для второго этапа обнаружения 13, выход которого является вторым входом порогового устройства второго этапа обнаружения 10.
Промышленная применимость. Заявляемое устройство может быть выполнено в виде программно-аппаратного комплекса. Возлагаемые задачи распределены между составными элементами и решаются на аппаратном и программном уровнях. Аппаратный комплекс обеспечивает физический канальный уровень взаимодействия с сопрягаемой аппаратурой и может быть реализован на базе специального вычислителя КР-1.1 ЛКНВ.466216.003 ТУ (Комплекс радиолокационный трассовый «СОПКА-2», руководство по эксплуатации, часть 4, Описание и работа составных частей, Система обработки сигналов и головной процессор ТРЛК, ЦИВР. 462418.029.1 РЭ3, стр. 39-45). Устройства 4-13, а также выполнение алгоритма обработки информации в дополнительном канале реализуются программным методом.
Алгоритм обработки информации в дополнительном канале решает следующие задачи:
- прием продетектированных эхо-сигналов на промежуточной частоте от приемной системы и сравнение с пороговым уровнем первого этапа обнаружения;
- аналого-цифровое преобразование всех пройденных сигналов;
- межобзорное накопление, преобразование и хранение результатов в накопителе Хафа;
- сравнение результатов преобразования с пороговым устройством второго этапа обнаружения;
- формирование трасс воздушных объектов, сигналы от которых прошли порог первого этапа обнаружения дополнительного канала;
- объединение результатов обработки радиолокационной информации основного и дополнительного каналов, а также передачи сформированных данных на систему отображения; - хранение пороговой величины для первого и второго этапов обнаружения дополнительного канала.
Согласованный фильтр 1 - цифровой фильтр (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М., «Радио связь», 1986, с. 38-45).
Детектор огибающей сигнала 2 - устройство, создающее выходное напряжение, являющееся линейной функцией огибающей сигнала промежуточной частоты (Справочник по радиолокации, под ред. М. Сколника, т. 3, М., Сов. радио, 1979, с. 163).
Пороговое устройство 3 - пороговое устройство, в котором поступающий сигнал сравнивается с уровнем порога обнаружения q0, выбранным исходя из заданной вероятности ложной тревоги, при превышении которого на выходе устройства формируется сигнал (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина, М., Радио и связь, 1984). Осуществление изобретения Способ осуществляется следующим образом.
С помощью основного канала РЛС осуществляет обзор контролируемого пространства и обнаружение воздушных объектов по результатам первичной обработки радиолокационной информации в основном канале обнаружения. Одновременно в дополнительном канале обнаружения устанавливается порог, обеспечивающий обнаружение слабых эхо-сигналов от малоразмерных воздушных объектов. Сигналы от воздушных объектов и помеховые сигналы, превысившие порог обнаружения, запоминаются в исходной матрице наблюдения (х, у) в виде точек, соответствующих, координатам дальности и азимута. Использование для обнаружения траекторий воздушных объектов известного алгоритма Хафа позволяет выявлять характерные отрезки прямых, полученные в ходе накопления многообзорной информации от движущихся прямолинейно воздушных объектов, причем скорость их движения не имеет значения. Обнаружение происходит на основании априорной модели их движения. Эхо-сигналы прямолинейно движущихся воздушных объектов, полученные в нескольких периодах обзора, будут выстраиваться в практически прямую линию последовательно друг за другом от обзора к обзору на относительно равных расстояниях, в то время как мешающие отметки помех могут появляться хаотично в разных элементах разрешения (фиг. 3).
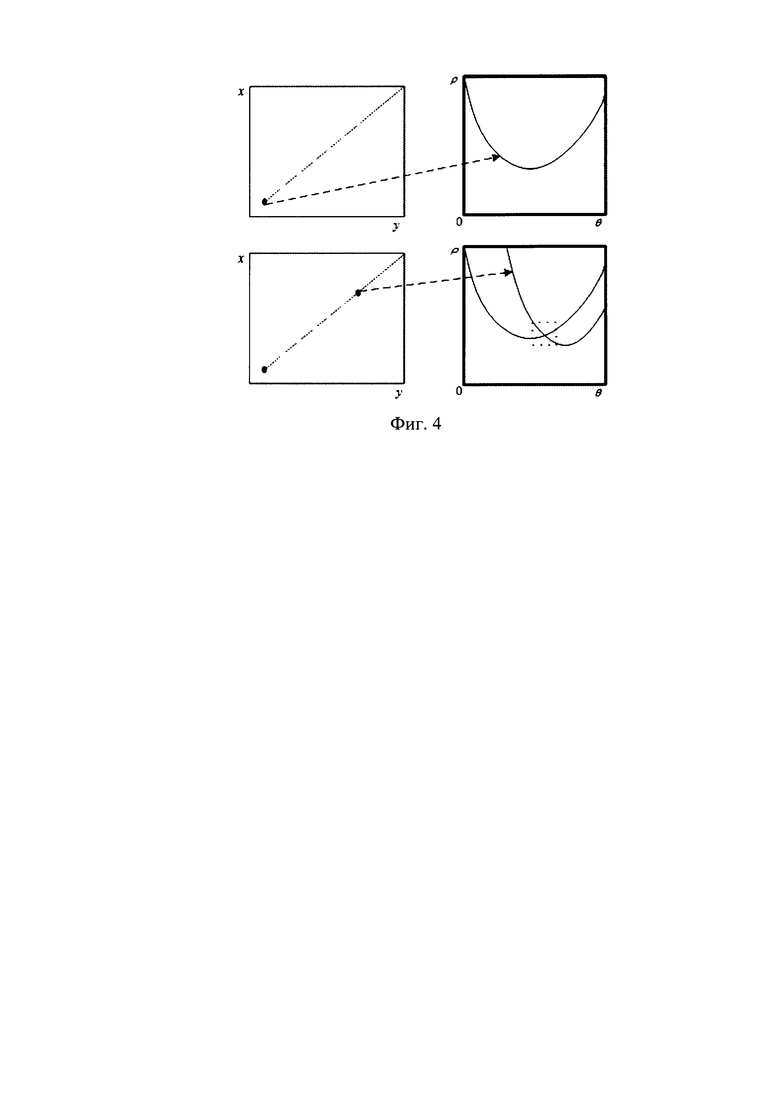
Результаты сравнения с порогом первого этапа обнаружения блока 6, полученные в каждом обзоре оцифровываются и сохраняются в блоке 7, подвергаются преобразованию Хафа в блоке 8. По результатам заполнения блока хранения результатов алгоритма Хафа 9 формируются экстремумы в пространстве траекторных параметров (ρ, θ). Экстремумы формируются в точках пересечения синусоидальных кривых, полученных от преобразования каждой точки исходной матрицы наблюдения:
ρ=х * cosθ + у * sinθ.
Характерно, что синусоидальные кривые пересекаются в одной точке в пространстве параметров (ρ, θ), когда порождающие их точки в исходной матрице наблюдения (х, у) лежат на соответствующей прямой (фиг. 4).
В результате последующих обзоров содержимое блока хранения результатов алгоритма Хафа 9 будет пополняться и для принятия решения об обнаружении воздушных объектов анализироваться пороговым устройством второго этапа обнаружения 10. Полученные после пороговой обработки координаты точек в пространстве параметров (ρ, θ) соответствуют траекторным параметрам воздушных объектов исходной матрицы наблюдения (х, у). Применяя операцию обратного проецирования в блоке формирования трассы дополнительного канала 11, производят восстановление траектории движения воздушных объектов за время наблюдения. Далее через элемент «ИЛИ» 4 трассовая информация поступает на систему отображения информации.
Таким образом обнаруживаются малоразмерные воздушные объекты, эхо-сигналы от которых не достигают необходимого уровня основного канала обнаружения одновременно с построением трассы по ним, чем достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа | 2019 |
|
RU2732916C1 |
| КОМПЛЕКСНЫЙ ОБНАРУЖИТЕЛЬ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ ВОЗДУШНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ | 2021 |
|
RU2776417C1 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| Межобзорное устройство картографирования пассивных помех для импульсно-доплеровских радиолокационных станций и способ его осуществления | 2020 |
|
RU2734071C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами | 2022 |
|
RU2791275C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| ПРИЕМНЫЙ ТРАКТ ЛОКАТОРА | 1993 |
|
RU2075762C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для обнаружения малоразмерных, движущихся прямолинейно, воздушных объектов (целей) в условиях действия помех. Техническим результатом изобретений является увеличение дальности обнаружения и дальности завязки трассы как для малоскоростных, так и для гиперскоростных малоразмерных целей в условиях наличия помех. Указанный результат достигается за счет увеличения на втором этапе обнаружения времени некогерентного многообзорного накопления сигналов, превысивших порог меньшего уровня на первом этапе обнаружения. При этом длительное многообзорное накопление на втором этапе обнаружения реализуется с использованием преобразований Хафа, результаты многообзорного накопления сравниваются с порогом второго этапа обнаружения, после чего принимается решение об обнаружении цели с одновременным формированием ее трассы. 2 н.п. ф-лы, 4 ил.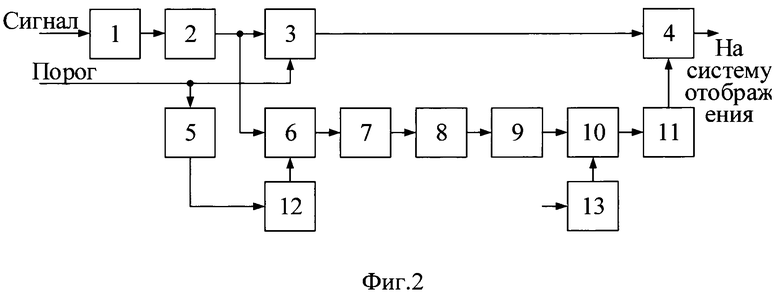
1. Способ обнаружения малоразмерных воздушных объектов, включающий согласованную фильтрацию принимаемого сигнала с последующим выделением огибающей сигнала и сравнением ее в каждой дискрете по дальности с порогом обнаружения, согласно изобретению, вводится дополнительный канал обнаружения, реализующий процесс сравнения сигнала с порогом первого этапа обнаружения, который обеспечивает обнаружение слабых эхо-сигналов от малоразмерных целей, аналого-цифровое преобразование всех пройденных сигналов, их межобзорное накопление, преобразование и хранение результатов в накопителе Хафа, дальнейшее сравнение результатов преобразования с пороговым устройством второго этапа обнаружения, по результатам которого формируются трассы всех воздушных объектов, сигналы от которых прошли порог первого этапа обнаружения дополнительного канала, что одновременно является фактом обнаружения воздушных объектов.
2. Устройство обнаружения малоразмерных воздушных объектов, содержащее последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2 и пороговое устройство 3, согласно изобретению, введен дополнительный канал обнаружения, состоящий из порогового устройства первого этапа обнаружения 6, блока АЦП и хранения первичной информации 7, блока реализации алгоритма Хафа 8, блока хранения результатов работы алгоритма Хафа 9, порогового устройства второго этапа обнаружения 10, блока формирования трассы дополнительного канала 11, логического элемента «ИЛИ» 4, блока выбора коэффициента для пороговой величины первого этапа обнаружения 5, блока хранения пороговой величины для первого этапа обнаружения 12, блока хранения пороговой величины для второго этапа обнаружения 13, причем выход порогового устройства 3 основного канала соединен с первым входом схемы «ИЛИ» 4, выход которой соединен с системой отображения, при этом выход детектора огибающей сигнала 2 является также первым входом порогового устройства первого этапа обнаружения 6 дополнительного канала, выход которого последовательно соединен с блоком АЦП и хранения первичной информации 7, блоком реализации алгоритма Хафа 8, блоком хранения результатов работы алгоритма Хафа 9, первым входом порогового устройства второго этапа обнаружения 10, блоком формирования трассы дополнительного канала 11, вторым входом логического элемента «ИЛИ» 4, одновременно с тем на второй вход порогового устройства 3 основного канала поступает уровень порога, который также является входом блока выбора коэффициента для пороговой величины первого этапа обнаружения 5 дополнительного канала, выход которого является входом блока хранения пороговой величины для первого этапа обнаружения 12, его выход соединен с вторым входом порогового устройства первого этапа обнаружения 6 дополнительного канала, задаваемая пороговая величина хранится в блоке хранения пороговой величины для второго этапа обнаружения 13, выход которого является вторым входом порогового устройства второго этапа обнаружения 10.
| Я.Д | |||
| ШИРМАН, Теоретические основы радиолокации, Советское радио, 1970, стр | |||
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ ЦЕЛЕЙ | 1984 |
|
RU2121700C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2568187C1 |
| Донная кормушка для централизованного кормления рыб в вырастных прудах | 1956 |
|
SU109569A1 |
| СТАНОК РЕЛЬСОШЛИФОВАЛЬНЫЙ | 2005 |
|
RU2287633C1 |

