Область техники
Изобретение относится к области измерительной техники, микрофлюидики, и может найти применение в различных отраслях промышленности, относящиеся к исследованию поверхностных или граничных свойств, смачивающей способности, в измерительной технике, применяемой в промышленности и лабораториях, в исследовании процессов микрофильтрации.
Уровень техники
Способы измерения динамического краевого угла смачивания используют в контрольно-измерительной технике, в измерительных приборах, гониометрах, оптических тензиометрах.
В настоящее время наиболее применимыми способами измерения динамического краевого угла в состоянии движения границы раздела фаз, являются способы растекающейся капли, способ погружения пластины, способ капиллярного подъема жидкости.
Способ капиллярного поднятия жидкости используется для определения динамического угла, он заключается в том, что фотографируют границу раздела фаз в капилляре, определяю высоту подъема жидкой фазы и соответствующее время с помощью высокоскоростной камеры, затем рассчитывают контактный угол по формуле Вашберна (Уошберна). В основе капиллярного способа лежит свойство искривленной границы раздела, заключающееся в том, что давление в жидкости под искривленной и плоской поверхностями неодинаково и отличается на величину капиллярного давления. Капиллярное давление является движущей силой поднятия или опускания жидкости в капиллярах, частично погруженных в эту жидкость. Выполняют измерения координаты экстремальной точки образующей поверхности жидкости при их капиллярном подъеме.
Определение динамического краевого угла смачивания при перемещении жидкости в капилляре под воздействием перепада давления и капиллярных сил расчет указанного угла осуществляют с помощью данных по скорости перемещения границы раздела фаз, фиксируемой с помощью оптических средств. Этот способ применяется в существующих приборах для измерения угла смачивания для микрожидкостных чипов, анализа смачиваемости пористых структур.
Распространенным способом исследования динамических краевых углов являются эксперименты по вытеснению двух несмешивающихся жидкостей в микромасштабных капиллярах. Существующие эксперименты часто выполняют путем ручного измерения краевого угла на изображении границы раздела, полученном с помощью микроскопа. Программное обеспечение для анализа изображений с участием человека, позволяет получать результаты, которые остаются в определенной степени субъективными и зависят от опыта и навыков пользователя, поэтому требуют совершенствования. Даже при небольшом отклонении оптического пути от горизонтали или при небольшом наклоне образца ошибки в измеренном угле смачивания могут быть значительными.
Неопределенности в профиле мениска и установлении граничных линий сильно зависят от разрешения изображения. Однако высокое разрешение изображения (т.е., большое количество пикселей) не гарантирует более точных результатов, поскольку главным образом оптическое разрешение определяет, насколько мелкие детали могут быть разрешены в записанном изображении.
Определение границы раздела фаз и динамического угла смачивания в микрокапиллярах, раскрыто в следующих патентах: источник [1]- CN109100485A «Micron capillary gas-liquid dynamic phase interface testing system»; источник [2] - CN 109146970 «Contact angle acquisition method of gas-liquid two-phase dynamic displacement images in micron capillary tubes»; источник [3]- CN «Measuring method for contact angle of gas-liquid phase interface in micrometer capillary passage; источник [4]- CN108918348A «Method for obtaining movement speed of gas-liquid phase interface in micron capillary channel»; источник [5]- CN109000883B «Method for determining relationship between pressure and flow in micron capillary channel»; источник [6] – CN109187277 «Gas liquid film moving distance acquisition methods in a kind of micron capillary tube passage», источник [7]- CN 109142675 «Micron capillary gas-liquid dynamic phase interface testing device CAS.
В указанных источниках за счет перемещения оптически прозрачного капилляра в поле зрения камеры, граница раздела фаз остается в заданном положении относительно камеры. Полученные изображения обрабатываются программой обработки по заданному алгоритму с целью извлечения граничных точек, составляющих изображение границы раздела фаз. Обеспечивается основа измерения для реализации измерения динамического угла смачивания при условии низкого капиллярного числа и низкого числа Бонда, что значительно повышает эффективность и точность обработки данных. Повышение точности измерения краевого угла и скорости перемещения границы раздела фаз с применением способов обработки изображения обеспечивается за счет повышения эффективности обработки данных.
При капиллярном подъеме жидкости высота и соответствующее время подъема уровня смачивающей жидкости фиксируются высокоскоростной камерой. Размер мениска смачивания мал, для того измерить угол смачивания, требуется увеличение полученного изображения. Процесс динамического смачивания означает, что граница раздела фаз перемещается на определенное расстояние, так что процесс движения границы раздела фаз необходимо наблюдать с большим увеличением в динамическом режиме. Существуют способы (источник [8] WO2010007210A1 «Method and apparatus for inspecting fluid flow in a microfluidic system») для анализа поведения микрофлюидных систем с визуальным контролем потока жидкости, позволяющие получать данные о потоке и характеристиках жидкости, в том числе определять динамический краевой угол жидкости, с помощью машинного зрения. Средство формирования изображения является частью системы машинного зрения, которая предназначена для проверки потока жидкости в микрофлюидной системе. Средство формирования изображения соединено с блоком обработки изображения и данных, который содержит алгоритм обработки изображения и алгоритм вычисления характеристики потока. Машинное зрение включает получение нескольких последовательных изображений потока и выполнение автоматического анализа на основе различий между последовательными изображениями. Данные изображения обрабатываются с использованием алгоритмов обработки изображений. С помощью алгоритмов вычисляются такие измеряемые величины, как расход, скорость, смещение и динамический краевой угол.
Для повышения точности измерения угла смачивания и точности распознавания границы раздела фаз существуют способы обработки изображений, основанные на глубоком обучении (Источник [9] CN113049453; Источник [10] CN110276415) с применением искусственных нейронных сетей (сверточные нейронные сети, сети с расширенными сверточными функциями RCF). Компьютер используется для использования способа глубокого обучения для определения угла смачивания сырой нефти на поверхности керна на основе изображения границы раздела фаз. В предпочтительном варианте осуществления изобретения использование Способа глубокого обучения для выполнения обнаружения краев на изображении включает использование Способа сети глубокого обучения Richer Convolutional Features (RCF).
При анализе патентов можно сделать вывод о том, что наиболее важными технико-экономическими показателями, которыми улучшаются изобретателями, являются показатели, направленные на повышение точности измерения угла смачивания, определения границы раздела фаз.
Исходя из признаков, раскрытых в описании к патентам, выделены следующие наиболее близкие аналоги.
Известна микро капиллярная система для испытания динамического взаимодействия фаз "газ-жидкость" (Источник [1] Патент CN 109100485 2018-08-03 Institute of Mechanics of CAS). Способ определения динамического угла смачивания на границе жидкость - газ - твердое тело в микрофлюидном канале, включает: нагнетание шприцевым насосом тестовой жидкости под давлением в канал с прозрачной стенкой в микрофлюидном чипе; получение, с использованием видеокамеры, последовательности оптических изображений мениска смачивания (границы раздела фаз), движущегося вдоль канала; передачу изображения видеокадра с протекающими по каналу жидкостями со сформированной границей раздела фаз; определение границы раздела фаз на изображениях мениска смачивания и координат массива точек границы раздела фаз; передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени на блок управления; удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры. Микрофлюидный чип с каналами установлен на подвижной платформе, которая линейно перемещается в зависимости от скорости потока жидкости в канале, так что граница раздела фаз всегда находится в поле зрения объектива видеокамеры. Система управления управляет процессом впрыска тестовой жидкости из впрыскивающего насоса в соответствии с информацией датчика давления и в то же время управляет двигателем подвижной платформы, чтобы скорость горизонтального движения микрофлюидного чипа была такой же, как и скорость движения тестовой жидкости в канале, в обратном направлении.
В аналоге [1] не применяют обработку изображений мениска смачивания нейронной сетью, и не используют систему с подвижным зеркалом, отражающим изображение мениска в объектив видеокамеры, для удержания границы раздела фаз; не предусмотрено перемещение зеркала тремя пьезоэлектрическими актюаторами, посредством сигнала с компьютера, исходя из скорости перемещения границы раздела фаз; при обработке изображений границы раздела фаз не предполагается аппроксимация, с помощью алгоритма, массива точек границы раздела фаз сплайн-функциями; определение функционального описания межфазной границы раздела фаз; вычисление кривизны линии границы раздела фаз, значения динамического угла смачивания на стенках канала по формуле и полученным данным о координатах массива точек границы раздела фаз и построение зависимости динамического угла смачивания от положения мениска смачивания в канале.
Недостатком описанного способа [1] является перемещение микрофлюидного чипа относительно блока видеокамеры. Наличие механического узла, платформы и двигателя с ходовым винтом неизбежно приводит к появлению микроподвижности и вибраций, влияющих на границу раздела фаз и процесс получения изображений, на качество получаемого изображения, возникновению шумов, снижающих точность определения динамического угла смачивания. К микрофлюидному чипу необходимо подключать, находящиеся под давлением, гибкие подводящие шланги, нельзя использовать жесткие металлические трубки, что ограничивает спектр материалов и диаметров шлангов. В аналоге не используется нейронная сеть для обработки изображений, алгоритм обработки изображения с видеокамеры с использованием аппроксимация сплайн-функциями, что снижает точность измерений.
Известен способ получения динамического краевого угла смачивания для изображений газожидкостного двухфазного потока в микронных капиллярных трубках (Источник [2] CN109146970A 2018-08-03). Способ включает нагнетание насосом жидкости под давлением в канал с прозрачной стенкой в микрофлюидном чипе; получение, с использованием видеокамеры, последовательности оптических изображений мениска смачивания (границы раздела фаз), движущегося вдоль канала; передачу изображения видеокадра с протекающими по каналу жидкостями со сформированной границей раздела фаз; определение границы раздела фаз на изображениях мениска смачивания и координат массива точек границы раздела фаз.
В аналоге [2] не применяют обработку нейронной сетью изображений мениска смачивания, в режиме реального времени; передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени на блок управления подвижным зеркалом, отражающим изображение мениска в объектив видеокамеры; удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры с использованием подвижного зеркала, отражающего изображение мениска смачивания в объектив камеры; перемещение зеркала тремя пьезоэлектрическими актюаторами, посредством сигнала с компьютера, исходя из скорости перемещения границы раздела фаз; аппроксимацию, с помощью алгоритма, массива точек границы раздела фаз сплайн-функциями; определение функционального описания межфазной границы раздела фаз; вычисление кривизны линии границы раздела фаз, значения динамического угла смачивания на стенках канала по формуле и полученным данным о координатах массива точек границы раздела фаз и построение зависимости динамического угла смачивания от положения мениска смачивания в канале.
Известен способ определения скорости движения границы раздела газ-жидкость в микронном капиллярном канале (Источник [4] CN 108918348). Способ движения границы раздела фаз газ-жидкость в микронном капиллярном канале включает следующие этапы: установка микрофлюидного чипа на подвижное сиденье движущейся платформы динамического измерительного устройства, соединение микрофлюидного чипа со шприцевым насосом, регулировка и установка блока камеры и одновременное подключение каждого устройства к системе управления; впрыскивание испытательной жидкости в микронный капиллярный канал микрофлюидного чипа, измерение давления текущей испытательной жидкости и регулирование давления впрыска нагнетательного насоса для соответствия заданному испытательному давлению с помощью системы управления; в процессе управления давлением нагнетательного насоса система управления одновременно управляет двигателем движущейся платформы, чтобы подвижное сиденье могло перемещаться по горизонтали, чтобы микрофлюидный чип перемещался в направлении, противоположном направлению движения тестовой жидкости в микрокапиллярном канале, микрофлюидный чип и тестовая жидкость движутся в режиме динамического баланса, а фазовая граница, образованная тестовой жидкостью, всегда находится в центре поля зрения блока камеры; получают изображения границы раздела фаз с помощью блока камеры и передают изображения в систему управления; система управления выполняет преобразование уровня серого и обработку фильтрации изображения, затем преобразует изображение уровня серого в двоичное изображение, используя алгоритм пороговой сегментации, и извлекает граничные точки, формирующие граничное изображение в форме конвейера, используя цвета точек пикселей; идентификация координатных точек, представляющих границу раздела фаз, стенки канала; выполнение аппроксимации кубическим полиномом на координатных точках, образующих фазовую границу, для получения кубической функции, выполнение аппроксимации линейной функции на координатных точках двух поверхностей стенки для получения двух соответствующих выражений, решение для получения точных координат двух конечных точек межфазной границы решение всех координатных точек между двумя конечными точками с помощью кубической функции и подгонка всех координатных точек между двумя конечными точками для получения границы раздела фаз; вычисление расстояния от двух конечных точек границы раздела фаз до одной стороны поля зрения, при этом расстояние от границы раздела фаз до стороны является средним значением расстояния между двумя конечные точки в сторону, и смещение от границы раздела фаз к входу микрокапиллярного канала в определенный момент получается суммой скорости смещения и расстояния подвижного сиденья на основании; и скорость границы раздела фаз является первой производной смещения границы раздела фаз, а текущая скорость границы раздела фаз получается путем вывода смещения в формате центральной разности.
Известен способ определения динамического краевого угла в канале микрофлюидного чипа (Источник [8] Патент WO2010007210A1 2010-01-21). Способ проверки микрофлюидной системы, в котором средство формирования изображения используется для обнаружения изменений потока текучей среды в микрофлюидной системе, отличающийся тем, что поток текучей среды в микрофлюидной системе проверяется с помощью машинного зрения. Характеристика, связанная с потоком текучей среды, определяется автоматически одним или несколькими алгоритмами на основе различий в последовательных изображениях машинного зрения. Проверяют движущиеся фронт и хвост жидкости. Определяют динамический контактный угол жидкости. Давление потока жидкости, измеряют одновременно с контролем потока с помощью машинного зрения. Способ подразумевает обработку последовательных видеокадров, по которым вычитанием определяется область смещения межфазной границы, и перевод изображения в битовый режим с последующей аппроксимацией межфазной границы функциональной зависимостью.
Известен способ определения угла смачивания сидячей капли нефти на поверхности керна с использованием нейросети (Источник [9] CN113049453 15.03.2021). Известен способ распознавания образов многофазных потоков в нефтяной промышленности, основанные на глубоком обучении (Источник [10] CN110276415). Через секцию или прозрачное окно получается поток с помощью высокоскоростной камеры или высокоскоростной кинокамеры. Выполняют ручную маркировку полученного флюидного изображения с использованием Способа прямого наблюдения или тегов параметров потока. Строят модель сверточной нейронной сети, модель сверточной нейронной обучается с использованием обучающей выборки. Модель сверточной нейронной сети читает немаркированные изображения потока жидкости. Все изображения подвергаются улучшению изображения. набор исходных данных не менее десяти раз.
Известен способ измерения угла смачивания границы раздела газ - жидкость в микронном капиллярном канале (Источник [11] CN109187278A). Способ включает нагнетание насосом жидкости под давлением в канал с прозрачной стенкой в микрофлюидном чипе; получение, с использованием видеокамеры, последовательности оптических изображений мениска смачивания (границы раздела фаз), движущегося вдоль канала; передачу изображения видеокадра с протекающими по каналу жидкостями со сформированной границей раздела фаз; определение границы раздела фаз на изображениях мениска смачивания и координат массива точек границы раздела фаз; передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени на блок управления для перемещения микрофлюидного чипа, поверхность раздела фаз, образованная тестовой жидкостью, всегда остается в поле зрения блока формирования изображения; аппроксимацию, с помощью алгоритма, массива точек границы раздела фаз; определение функционального описания межфазной границы раздела фаз; вычисление кривизны линии границы раздела фаз, значения динамического угла смачивания на стенках канала по формуле и полученным данным о координатах массива точек границы раздела фаз и построение зависимости динамического угла смачивания от положения мениска смачивания в канале.
Способ и устройство [11], по технической сущности, являются наиболее близкими к заявленному изобретению и выбраны в качестве прототипа.
Из источника [11] известен способ измерения динамического угла смачивания в канале при напоре жидкости, в котором выполняют нагнетание насосом жидкости под давлением в канал с прозрачной стенкой в микрофлюидном чипе; получение, с использованием видеокамеры, последовательности оптических изображений мениска смачивания (границы раздела фаз), движущегося вдоль канала; передачу изображения видеокадра с протекающими по каналу жидкостями со сформированной границей раздела фаз; определение границы раздела фаз на изображениях мениска смачивания и координат массива точек границы раздела фаз; передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени на блок управления для перемещения микрофлюидного чипа, поверхность раздела фаз, образованная тестовой жидкостью, всегда остается в поле зрения блока формирования изображения; аппроксимацию, с помощью алгоритма, массива точек границы раздела фаз; определение функционального описания межфазной границы раздела фаз; вычисление кривизны линии границы раздела фаз, значения динамического угла смачивания на стенках канала по формуле и полученным координатам массива точек границы раздела фаз и построение зависимости динамического угла смачивания от положения мениска смачивания в канале.
Из источника [11] известно устройство для измерения динамического угла смачивания в канале при напоре жидкости, содержащее насос, канал с прозрачной стенкой, микрофлюидный чип, видеокамеру, блок управления для перемещения микрофлюидного чипа, микрофлюидный чип с каналами, установлен на подвижное сиденье мобильной платформы. Двигатель приводит в движение винтовой стержень, заставляя движущееся основание перемещаться в горизонтальном направлении, так что микрожидкостный чип может перемещаться горизонтально. Блок камеры расположен над микрожидкостным чипом. В блоке используется высокоточная цифровая камера. Блок камеры передает изображение границы раздела фаз в систему управления.
В способе и устройстве [11] для удержания изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры, микрожидкостной чип, с каналами для измерения, установлен на подвижное сиденье мобильной платформы. Вся мобильная платформа эквивалентна конструкции с винтовым стержнем, и двигатель приводит в движение винтовой стержень для вращения, заставляя движущееся основание перемещаться в горизонтальном направлении, так что микрожидкостный чип может перемещаться горизонтально. Блок камеры расположен над микрожидкостным чипом и используется для получения изображения границы раздела фаз тестовой жидкости в микронном капиллярном канале, а затем выводится в систему управления для анализа данных, таких как краевой угол смачивания. В блоке формирования изображения может использоваться высокоточная цифровая камера. Блок камеры получает изображение границы раздела фаз и передает его в систему управления. Система управления выполняет преобразование серой шкалы и обработку фильтрации изображения, а затем использует алгоритм пороговой сегментации для преобразования серого изображения в двоичное изображение и использует Способ связанной области для извлечения граничных точек, которые составляют трубу и фазовую границу через цвет пикселей.
В способе и устройстве [11] не используется подвижное зеркало с тремя пьезоэлектрическими актюаторами, для удержания изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры, не применяется обработка нейронной сетью изображений мениска смачивания, в режиме реального времени. Смещение поля наблюдения видеокамеры, с помощью узла настройки поля зрения, происходит с использованием винта и мобильной платформы, механических составляющих, которые приводят к вибрации, что снижает точность измерений. Применение узла настройки поля зрения видеокамеры, основанного на подвижной платформе и использование подвижного микрофлюидного чипа или подвижной камеры, создает условия для появления механических вибраций и связанное с ними ухудшение качества изображения.
Проблема повышения точности измерений угла смачивания в динамике, повышения точности определения границы раздела фаз, снижение временных затрат на обработку изображений при обеспечении простоты конструкции используемых устройств, является актуальной.
Сущность изобретения
Технический результат - повышение точности определения динамического угла смачивания в канале при напоре жидкости.
При использовании изобретения расширяется поле наблюдения за движущейся границей раздела фаз, увеличивается диапазон значений динамического угла смачивания, определяемого при перемещении мениска смачивания в канале.
Технический результат достигается тем, что в способе измерения динамического угла смачивания в канале, включающем: нагнетание насосом жидкости в канал; получение последовательности изображений мениска смачивания; определение границы раздела фаз на изображениях; передачу координат границы раздела фаз в режиме реального времени на блок управления; вычисление кривизны линии границы раздела фаз, вычисление значения динамического угла смачивания на стенках канала и построение зависимости динамического угла смачивания от положения мениска смачивания в канале; удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры осуществляют с использованием подвижного зеркала, отражающего изображение мениска смачивания в объектив камеры, передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени осуществляют на блок управления подвижным зеркалом, отражающим изображение мениска в объектив видеокамеры, обработку изображений мениска смачивания осуществляют с применением нейронной сети в режиме реального времени, перемещение зеркала выполняют тремя пьезоэлектрическими актюаторами посредством сигнала с компьютера, исходя из скорости перемещения границы раздела фаз.
Предусмотрено, что анализ изображения проводится нейронной сетью, прошедшей обучение на множестве изображений движущейся межфазной границы, которые обладают широким спектром положения межфазной границы в канале, геометрии канала, яркости изображения, баланса белого цвета, наличия пузырьков газа, микрокапель несмешивающихся жидкостей, посторонних включений, таких как трассеры, твердые частицы.
Смещение поля наблюдения видеокамеры, с помощью узла настройки поля зрения, происходит без применения механических составляющих, что исключает появление вибраций и повышает точность измерений. Применение узла настройки поля зрения видеокамеры, основанного на подстраиваемом пьезоэлементами зеркале, позволяет следить за межфазной границей в канале жестко закрепленного микрофлюидного чипа с помощью жестко закрепленной видеокамеры, что исключает механические вибрации и связанное с ними ухудшение качества изображения.
Способом возможно проводить измерения динамического угла смачивания в каналах с изменяющейся геометрией (расширяющиеся, сужающиеся, с криволинейными стенками) при движении межфазной границы.
Применение нейросети для определения положения межфазной границы и ее формы, а также корректировки поля наблюдения за счет изменения скорости движения зеркала для ориентации поля наблюдения видеокамеры относительно микрофлюидного чипа является отличительной особенностью, позволяет повысить точность определения указанных величин благодаря игнорированию динамически меняющегося баланса белого цвета, автокоррекции яркости видеокамеры, неравномерности подсветки, а также наличия посторонних включений (песчинок, трассерных частиц и пр.), которые могут по интенсивности отображающих их пикселей совпадать с одной из исследуемых фаз.
Изобретение поясняется графическими материалами:
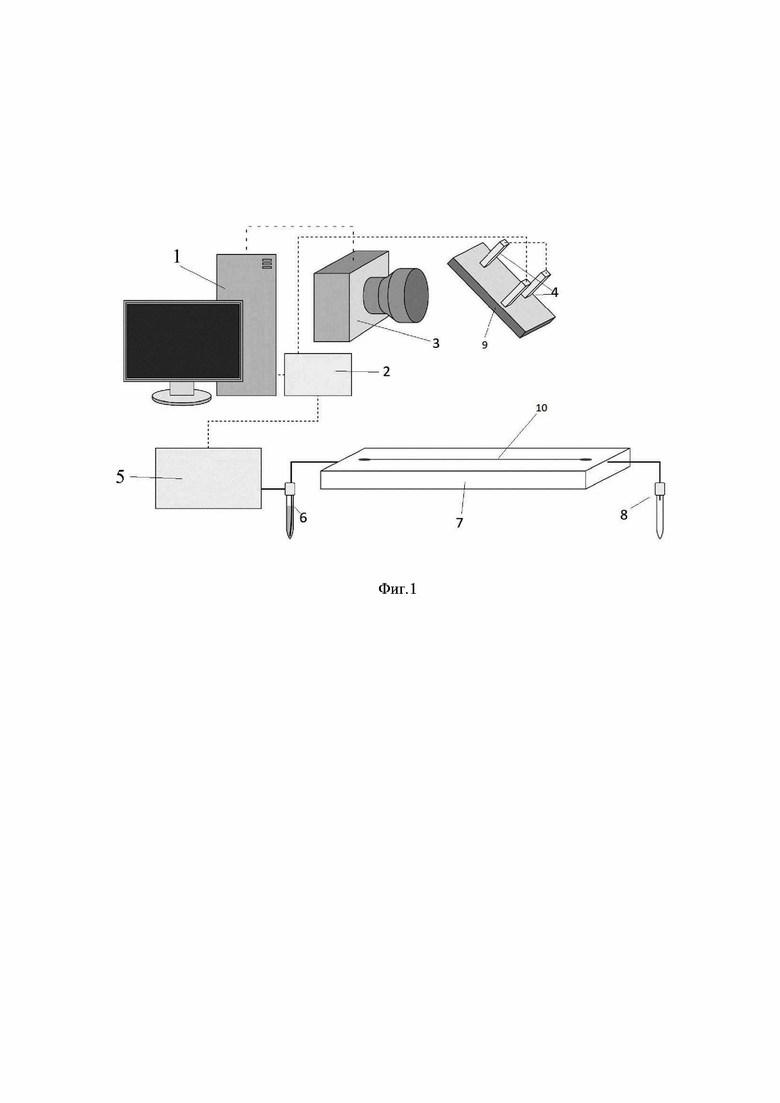
Фиг. 1 – схема устройства для реализации способа измерения динамического угла смачивания в канале при напоре жидкости.
Спецификация (на графических материалах обозначены следующие позиции):
1 – управляющий персональный компьютер;
2 – внешний блок управления установкой;
3 – видеокамера;
4 – зеркало на пьезоэлектрических актюаторах;
5 – насос;
6 – герметичный резервуар для жидкости;
7 – микрофлюидный чип;
8 – сливной резервуар;
9 – зеркало;
10 – канал.
Осуществление изобретения
Способ относится к области измерительной техники и может быть использован для измерения смачивающих и впитывающих свойств пористых сред, тестирования новых типов поверхностно-активных веществ в нефтедобывающей, агрохимической, фармацевтической и лакокрасочной промышленностях, сельском и лесном хозяйствах.
Способ основан на получении последовательности оптических изображений положения мениска смачивания (двух или трехфазной линии контакта) вдоль канала с прозрачной стенкой при нагнетании жидкости в канал под давлением; их обработки в режиме реального времени для нахождения профиля мениска и координат границы раздела фаз; аппроксимации с помощью алгоритма формы мениска сплайн-функциями; вычислении по полученным данным динамического краевого угла смачивания и построении зависимости динамического угла от координаты положения мениска смачивания в канале.
Устройство для измерения динамического угла смачивания в канале при напоре жидкости содержит персональный компьютер 1, внешний блок управления 2, видеокамеру 3, насос 5, герметичный резервуар 6, микрофлюидный чип 7, сливной резервуар 8, зеркало 9 установленное на пьезоэлектрических актюаторах 4, канал 10.
Зеркало 9 с тремя пьезоэлектрическими актюаторами 4 выполнено как единый модуль, причем зеркало 9 перемещается пьезоэлектрическими актюаторами 4, посредством управляющего сигнала, поступающего с компьютера 1 на внешний блок управления 2 актюатором 4, на основании заданных программой алгоритмов для удержания изображения движущейся границы раздела фаз в поле зрения неподвижной камеры 3.
Способ позволяет в режиме реального времени определять геометрию мениска смачивания и динамический краевой угол вдоль канала с прозрачной стенкой при нагнетании жидкости в канал.
Способ измерения динамического угла смачивания в канале 10, при напоре жидкости, включает нагнетание насосом 5 жидкости под давлением в канал 10 с прозрачной стенкой в микрофлюидном чипе 7, получение, с использованием видеокамеры 3, последовательности видеокадров оптических изображений мениска смачивания, движущегося вдоль канала 10, передачу видеокадров с протекающими по каналу жидкостями со сформированной границей раздела фаз на компьютер 1, определение границы раздела фаз на изображениях мениска смачивания и координат массива точек границы раздела фаз, передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени на блок управления 2 актюатором 4, аппроксимацию, с помощью алгоритма, массива точек границы раздела фаз сплайн-функциями, определение функционального описания межфазной границы раздела фаз, вычисление кривизны линии границы раздела фаз, значения динамического угла смачивания на стенках канала 10 по формуле и полученным координатам массива точек границы раздела фаз и построение зависимости динамического угла смачивания от положения мениска смачивания в канале 10. Причем удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры 3 осуществляют с использованием подвижного зеркала 9, отражающего изображение мениска смачивания в объектив видеокамеры 3, передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени осуществляют на блок управления 2 подвижным зеркалом 9, отражающим изображение мениска в объектив видеокамеры 3, обработку изображений мениска смачивания осуществляют на компьютере 1 с применением нейронной сети, в режиме реального времени, перемещение зеркала 9 выполняют тремя пьезоэлектрическими актюаторами 4, посредством сигнала с компьютера 1, исходя из скорости перемещения границы раздела фаз.
Совокупность указанных технических признаков способа решает проблему повышения точности измерений и обеспечивает технический результат - повышение точности определения динамического угла смачивания в канале при напоре жидкости.
Алгоритм осуществления способа, реализуемый в устройстве (фиг.1) включает следующие шаги:
- нагнетание насосом 5 жидкости под давлением в канал 10 с прозрачной стенкой выполненный в микрофлюидном чипе 7;
- получение, с использованием видеокамеры 3, последовательности оптических изображений мениска смачивания (границы раздела фаз), движущегося вдоль канала 10;
- передачу, с видеокамеры 3 в компьютер 1, изображения видеокадра с протекающими по каналу 10 жидкостями со сформированной границей раздела фаз;
- обработку на компьютере 1, по заданным алгоритмам, нейронной сетью, изображений мениска смачивания, в режиме реального времени;
- определение, на компьютере 1, по заданным алгоритмам, нейронной сетью, границы раздела фаз на изображениях мениска смачивания и координат массива точек границы раздела фаз;
- передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени с компьютера 1 на блок управления 2 подвижным зеркалом 9 на пьезоэлектрических актюаторах 4, отражающим изображение мениска в объектив неподвижной видеокамеры 3;
- удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры 3 с использованием подвижного зеркала 9 на пьезоэлектрическими актюаторах 4, отражающего изображение мениска смачивания в объектив камеры 3;
-перемещение зеркала 9 пьезоэлектрическими актюаторами 4, посредством сигнала с компьютера 1, по алгоритмам исходя из скорости перемещения границы раздела фаз;
- аппроксимацию, на компьютере 1, с помощью алгоритма массива точек границы раздела фаз сплайн-функциями;
- определение функционального описания межфазной границы раздела фаз;
- вычисление, на компьютере 1, кривизны линии границы раздела фаз, значения динамического угла смачивания на стенках канала по формуле и полученным координатам массива точек границы раздела фаз и построение зависимости динамического угла смачивания от положения мениска смачивания в канале.
Перемещение зеркала 9 тремя пьезоэлектрическими актюаторами 4, посредством сигнала с компьютера 1, исходя из скорости перемещения границы раздела фаз обеспечивает расширение поля наблюдения за движущейся границей раздела фаз, снижает появление вибраций и повышает точность измерений.
Измерение динамического угла смачивания и кривизны межфазной границы, проводится в микрофлюидном чипе 7, при этом геометрия каналов 10 в плоскости чипа 7 может быть произвольной (форма поперечного сечения канала также может быть круглой, прямоугольной, треугольной, в форме известных в геометрии плоских фигур или фигур с криволинейной сложной формой). Непрерывный напор жидкости обеспечивается насосом 5 (создающим избыточное давление или разряжение). Для получения детализированного изображения границы раздела фаз в нескольких положениях вдоль канала 10 используют видеокамеру 3, предпочтительно высокоскоростную, которая направлена на микрофлюидный чип 7 через зеркало 9. Оптическая ось видео камеры 3 направлена на зеркало 9, зеркало 9 в свою очередь направлено на микрофлюидный чип 7, так что в объектив камеры 3 отражается изображение микрофлюидного чипа 7 с каналом 10. Зеркало 9 оснащенное тремя пьезоэлектрическими актюаторами 4, работа пьезоэлектрических актюаторов 4 (включение, выключение, продолжительность, скорость, порядок работы актюаторов 4), регулируется блоком управления 2 по сигналу, поступающему от персонального компьютера 1 исходя из скорости перемещения межфазной границы, так что зеркало 9 всегда направлено на область границы раздела фаз, и изображение канала 10 микрофлюидного чипа 7 захватывается видеокамерой 3, сигнал с которой поступает в компьютер 1, формирующий управляющие сигналы на блок управления 2.
Таким образом, расширяется поле наблюдения за межфазной границей, но смещение поля зрения происходит без механических колебаний и вибраций камеры 3 или чипа 7, что снижает появление отклонений при работе устройства. Для определения положения границы раздела фаз, её формы, а также для расчета и корректировки скорости движения камеры 3 используется компьютер 1 оснащенный программным обеспечением с нейросетью. Архитектура нейросети подразумевает передачу ей изображения видеокадра с протекающими по каналу микрофлюидного чипа 7 жидкостями со сформированной межфазной границей. Нейросеть состоит из входного и выходного слоев, количество нейронов в которых соответствует количеству пикселей обрабатываемого изображения. Анализ изображения осуществляется промежуточными слоями, количество которых определяется архитектурой “U-net” [Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-net: Convolutional net- works for biomedical image segmentation. ArXiv:1505.04597, 2015] и зависит от размера изображения. Передача информации между слоями происходит по принципу семантической сегментации [Yanming Guo, Yu Liu, Theodoros Georgiou, and Michael S. Lew. A review of semantic segmentation using deep neural networks. Inter- national Journal of Multimedia Information Retrieval, 7(2):87–93, 2018], когда изображение разделяется на группы пикселей (так называемые суперпиксели) для упрощения анализа, с чередованием преобразования сверткой [Yann LeCun, Léon Bottou, Yoshua Bengio, Patrick Haffner, et al. Gradient-based learning applied to document recognition. Proceedings of the IEEE, 86(11):2278–2324, 1998]. Для формирования выходного изображения используется процедура пошагового восстановления размера, передающая информацию от множества внутрилежащих слоев в один внешний слой с увеличенным в 4 раза количеством нейронов. В выходном слое формируется изображение такого же размера, что и входное, на котором контрастным цветом выделено положение межфазной границы и стенок канала. В полученном изображении пиксели, соответствующие интересующей нас границе, кодируются значением 1 (белым цветом), а не принадлежащие этой границе – значением 0 (черным цветом). Затем по обработанным изображениям аппроксимацией сплайн-функциями 3 порядка определяется функциональное описание межфазной границы и рассчитывается кривизна и контактный угол на стенках канала.
Перед обработкой изображения нейросеть обучают на тестовых изображениях, где предварительно выделена межфазная граница и стенки канала. Процесс обучения предполагается проводить единожды экспертами в данной области техники независимо друг от друга, после чего нейросеть замораживается и без изменений используется для обработки других изображений.
Затем аппроксимацией сплайн-функциями третьего порядка определяется функциональное описание межфазной границы и рассчитывается кривизна и краевой угол смачивания на стенках канала.
Частота обработки достигает 10 кадров/секунду с применением современного персонального компьютера средней производительности (и может быть увеличено за счет его улучшения), что позволяет получить достаточный для статистического анализа набор данных, а также проводить измерения контактного угла в каналах с изменяющейся геометрией (расширяющиеся, сужающиеся, с криволинейными стенками) при движении межфазной границы. Применение нейросети для определения положения межфазной границы и ее формы, а также корректировки скорости движения видеокамеры 3 относительно микрофлюидного чипа 7 с использованием зеркала 9 является отличительной особенностью, которая позволяет повысить точность определения искомых величин по сравнению с классическими методами (основанными на сравнении интенсивности отдельных пикселей) благодаря игнорированию динамически меняющегося баланса белого цвета, автокоррекции яркости видеокамеры, неравномерности подсветки, а также наличия посторонних включений (песчинок, трассерных частиц и пр.), которые могут по интенсивности отображающих их пикселей совпадать с одной из исследуемых фаз.
Предложенный способ определения динамического угла смачивания в микрофлюидном канале и устройство для его осуществления предполагает, что вместо традиционного алгоритма попиксельный анализ изображения проводится нейронной сетью, прошедшей обучение на множестве изображений движущейся межфазной границы, которые обладают широким спектром положения межфазной границы в канале, геометрии канала, яркости изображения (определяется временем экспозиции), баланса белого цвета, наличия пузырьков газа, микрокапель несмешивающихся жидкостей, посторонних включений (трассеры, твердые частицы). Применение нейронной сети позволяет определять положение межфазной границы жидкость-жидкость или жидкость-газ с высокой точностью, скоростью и с использованием недорогого оборудования. Применение нейронной сети позволяет определять форму произвольной межфазной границы в микрофлюидных каналах произвольной геометрии. Применение узла настройки поля зрения видеокамеры, основанного на подстраиваемом пьезоэлементами зеркале, позволяет следить за межфазной границей в канале жестко закрепленного микрофлюидного чипа с помощью жестко закрепленной видеокамеры, что исключает механические вибрации и связанное с ними ухудшение качества изображения.
Техническое решение обеспечивает повышение точности измерений угла смачивания в динамике, повышение точности определения границы раздела фаз, снижение временных затрат на обработку изображений при обеспечении простоты конструкции используемых устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО УГЛА СМАЧИВАНИЯ В КАНАЛЕ | 2022 |
|
RU2794420C1 |
| ПЕЧАТАЮЩАЯ ГОЛОВКА ДЛЯ ТЕРМОГРАФИЧЕСКОЙ СТРУЙНОЙ ПЕЧАТИ И СПОСОБ ИЗГОТОВЛЕНИЯ ПЕЧАТАЮЩЕЙ ГОЛОВКИ ДЛЯ ТЕРМОГРАФИЧЕСКОЙ СТРУЙНОЙ ПЕЧАТИ | 2017 |
|
RU2746306C2 |
| ОЧКИ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ (ДР) И СПОСОБ ДОБАВЛЕНИЯ ВИРТУАЛЬНЫХ ИЗОБРАЖЕНИЙ В ИЗОБРАЖЕНИЕ, ВИДИМОЕ НОСИТЕЛЮ ОЧКОВ ПО МЕНЬШЕЙ МЕРЕ ЧЕРЕЗ ОДНО СТЕКЛО ОЧКОВ | 2018 |
|
RU2763922C2 |
| УСТРОЙСТВО С МИКРОФЛЮИДНЫМ ЧИПОМ ДЛЯ ИЗМЕРЕНИЙ ОПТИЧЕСКОЙ СИЛЫ И ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ КЛЕТОК С ИСПОЛЬЗОВАНИЕМ КОНФИГУРАЦИИ МИКРОФЛЮИДНОГО ЧИПА И ДИНАМИКИ | 2017 |
|
RU2764676C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ДВИЖЕНИЯ ГЛАЗ | 2017 |
|
RU2696042C2 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ КРАЕВОГО УГЛА СМАЧИВАНИЯ | 2022 |
|
RU2801551C1 |
| СПОСОБ ИЗМЕРЕНИЯ БЫСТРЫХ ДВИЖЕНИЙ ГЛАЗ И ОТКЛОНЕНИЙ БИНОКУЛЯРНОГО ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352244C2 |
| Микрофлюидный чип смешения | 2019 |
|
RU2724254C1 |
| Способ определения поверхностного натяжения жидкости | 1984 |
|
SU1182338A1 |
| СПОСОБ ФЛУОРЕСЦЕНТНОЙ НАНОСКОПИИ (ВАРИАНТЫ) | 2005 |
|
RU2305270C2 |
Изобретение относится к области измерительной техники. Способ измерения динамического угла смачивания в канале включает нагнетание насосом жидкости в канал, получение последовательности изображений мениска смачивания, определение границы раздела фаз на изображениях, передачу координат границы раздела фаз в режиме реального времени на блок управления, вычисление кривизны линии границы раздела фаз, вычисление значения динамического угла смачивания на стенках канала и построение зависимости динамического угла смачивания от положения мениска смачивания в канале. При этом удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры осуществляют с использованием подвижного зеркала, отражающего изображение мениска смачивания в объектив камеры, передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени осуществляют на блок управления подвижным зеркалом, отражающим изображение мениска в объектив видеокамеры. Способ также содержит обработку изображений мениска смачивания с применением нейронной сети в режиме реального времени, перемещение зеркала выполняют тремя пьезоэлектрическими актюаторами посредством сигнала с компьютера исходя из скорости перемещения границы раздела фаз. Достигается повышение точности определения динамического угла контакта в канале при напоре жидкости. 3 з.п. ф-лы, 1 ил.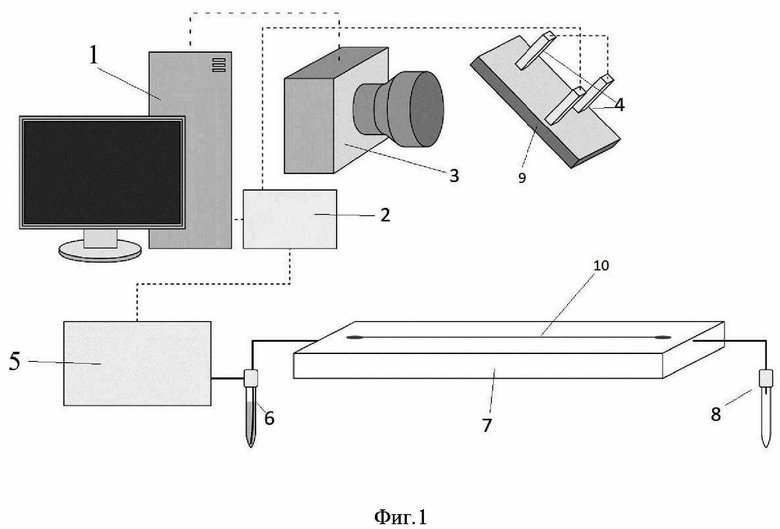
1. Способ измерения динамического угла смачивания в канале, включающий нагнетание насосом жидкости в канал, получение последовательности изображений мениска смачивания, определение границы раздела фаз на изображениях, передачу координат границы раздела фаз в режиме реального времени на блок управления, вычисление кривизны линии границы раздела фаз, вычисление значения динамического угла смачивания на стенках канала и построение зависимости динамического угла смачивания от положения мениска смачивания в канале, отличающийся тем, что удержание изображения движущейся границы раздела фаз в поле зрения неподвижной видеокамеры осуществляют с использованием подвижного зеркала, отражающего изображение мениска смачивания в объектив камеры, передачу координат массива точек границы раздела фаз при ее непрерывном смещении в режиме реального времени осуществляют на блок управления подвижным зеркалом, отражающим изображение мениска в объектив видеокамеры, обработку изображений мениска смачивания осуществляют с применением нейронной сети в режиме реального времени, перемещение зеркала выполняют тремя пьезоэлектрическими актюаторами посредством сигнала с компьютера исходя из скорости перемещения границы раздела фаз.
2. Способ измерения динамического угла смачивания в канале по п. 1, отличающийся тем, что анализ изображения проводится нейронной сетью, прошедшей обучение на множестве изображений движущейся межфазной границы, которые обладают широким спектром положения межфазной границы в канале, геометрии канала, яркости изображения, баланса белого цвета, наличия пузырьков газа, микрокапель несмешивающихся жидкостей, посторонних включений, таких как трассеры, твердые частицы.
3. Способ измерения динамического угла смачивания в канале по п. 1, отличающийся тем, что насос создает создающим избыточное давление или разряжение.
4. Способ измерения динамического угла смачивания в канале по п. 1, отличающийся тем, что применяют устройство для измерения динамического угла смачивания в канале, содержащее персональный компьютер, внешний блок управления, видеокамеру, насос, герметичный резервуар, микрофлюидный чип с каналом, сливной резервуар, зеркало, установленное на пьезоэлектрических актюаторах, причем зеркало перемещается пьезоэлектрическими актюаторами, посредством управляющего сигнала, поступающего с компьютера на внешний блок управления актюатором, на основании заданных программой алгоритмов для удержания изображения движущейся границы раздела фаз в поле зрения неподвижной камеры.
| Устройство для проходки стволов шахт в плывунах | 1950 |
|
SU92860A1 |
| Ротор для автоматических роторных линий | 1959 |
|
SU124786A1 |
| CN 113049453 A, 29.06.2021 | |||
| CN 110276415 A, 24.09.2019. | |||

