ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ПАТЕНТНУЮ ЗАЯВКУ
[0001] Данная патентная заявка имеет приоритет относительно патентной заявки США с серийным номером 16/244,980, озаглавленной "Измерения расстояния на основе системы лидара (лидара) с многоуровневым управлением мощностью", поданной 10 января 2019, которая, в свою очередь, имеет приоритет согласно 35 U.S.C. §119 относительно предварительной патентной заявки США с серийным номером 62/615,877, озаглавленной "Измерения расстояния на основе системы лидара с многоуровневым управлением мощностью", поданной 10 января 2018, предмет которой включен здесь полностью посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Описываемые варианты реализации относятся к измерительным системам 3-D облака точек на основе системы лидара (в русскоязычной литературе часто используется термин "лидар").
УРОВЕНЬ ТЕХНИКИ
[0003] В системах лидара используются импульсы света для измерения расстояния до объекта на основании времени пролета (TOF) каждого из импульсов света. Импульс света, испускаемый источником освещения системы лидара, взаимодействует с отдаленным объектом. Часть этого света отражается от объекта и возвращается к детектору системы лидара. Расстояние оценивается на основании времени, прошедшего между испусканием импульса света и регистрацией возвратного импульса света. В некоторых примерах импульсы света создаются посредством лазерного излучателя. Световые импульсы фокусируются через линзу или через сборку линз. Измеряется время, требуемое для возвращения импульса лазерного света к детектору, установленному вблизи излучателя. По измерению времени с высокой точностью определяется расстояние.
[0004] В некоторых системах лидара используется единственная комбинация лазерный излучатель/детектор, объединенная с вращающимся зеркалом для эффективного сканирования в поперечной плоскости. Измерения расстояния, выполняемые такой системой, эффективно двумерны (то есть плоские), и зафиксированные точки расстояния представляются как 2-D (то есть лежащее в одной плоскости) облако точек. В некоторых примерах вращающиеся зеркала вращаются с очень большими скоростями (например, тысячи оборотов в минуту).
[0005] Во многих рабочих ситуациях существует потребность в 3-D облаке точек. Для исследования окружающей среды в трех измерениях использовалось множество схем. В некоторых примерах 2-D прибор приводится в движение вверх и вниз и/или назад и вперед, часто на кардановом подвесе. В данной области техники это известно, как "мерцание" или "кивание" датчиком. Таким образом, блок лидара с единственным пучком может использоваться для захвата всей 3-D матрицы точек, находящихся на расстоянии, хотя и по одной точке в каждый момент времени. В соответственном примере для "разделения" лазерного импульса на множественные слои, каждый из которых составляет несколько различный угол с вертикалью, используется призма. Это моделирует эффект кивания, отмеченный выше, но без непосредственного возбуждения датчика.
[0006] Во всех вышеупомянутых примерах световой путь одной комбинации лазерный излучатель/детектор так или иначе изменяется для достижения более широкого поля обзора, чем у одного датчика. Количество элементов изображения, которое такие устройства могут создавать в единицу времени, с необходимостью ограничено вследствие ограничений частоты повторения импульсов единственного лазера. За любое изменение пути пучка, с помощью которого достигается охват большей области, независимо от того, выполняется оно посредством зеркала, призмы или приведения устройства в движение, приходится расплачиваться уменьшенной плотностью облака точек.
[0007] Как было отмечено выше, системы 3-D облака точек существуют в нескольких конфигурациях. Однако во многих приложениях необходим обзор по широкому полю. Например, в приложении для автономного транспортного средства вертикальное поле обзора должно простираться вниз настолько близко, насколько это возможно, чтобы видеть землю перед транспортным средством. Кроме того, вертикальное поле обзора должно простираться выше горизонта в случае, если автомобиль въезжает на уклон дороги. Кроме того, необходимо иметь минимальную задержку между действиями, происходящими в реальности, и визуализацией этих действий. В некоторых примерах желательно обеспечивать обновление полного изображения по меньшей мере пять раз в секунду. Для соответствия этим требованиям была разработана 3-D система лидара, включающая в себя матрицу из множества лазерных излучателей и детекторов. Эта система описывается в патенте США 7,969,558, выпущенном 28 июня 2011, предмет которого включен здесь полностью посредством ссылки.
[0008] Во многих приложениях испускается последовательность импульсов. Направление каждого из импульсов, следующих друг за другом, последовательно изменяется. В данных примерах результат измерения расстояния, связанный с каждым отдельным импульсом, можно рассматривать как элемент изображения, и набор элементов изображения, испускаемых и захватываемых друг за другом (то есть "облако точек") может быть представлен как изображение или проанализирован для других целей (например, обнаружения препятствий). В некоторых примерах программное обеспечение просмотра используется для представления получающихся облаков точек как изображений, которые появляются перед пользователем в трехмерном виде. Для отображения результатов измерения расстояний в виде 3-D изображений, которые появляются так, как будто они были зафиксированы камерой с естественным движением, могут использоваться различные схемы.
[0009] В существующих системах лидара для исследования конкретного объема окружающей среды в любой данный момент времени используется пучок света. Регистрация возвратных сигналов включает в себя значительные источники шума измерений, который усиливается с увеличением диапазона измерений. Во многих приложениях отношение сигнала к шуму измеряемых сигналов улучшается посредством увеличения интенсивности лазерного импульса. Однако увеличение интенсивности лазерного импульса может привести к насыщению детектора, электронных устройств преобразования сигнала, аналого-цифровых преобразователей или любой их комбинации, особенно для измерений на малой дальности.
[0010] При поддержании высоких уровней разрешающей способности и диапазона визуализации желательно усовершенствование управления мощностью систем лидара.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0011] Описываются способы и системы для управления мощностью освещения трехмерной системы визуализации на основе системы лидара, основанные на дискретных уровнях мощности освещения.
[0012] В одном из объектов, интенсивность освещения импульсным пучком света освещения, испускаемым системой лидара, изменяется на основании интенсивности измеряемых возвратных импульсов. Таким образом, интенсивность измеряемых возвратных импульсов поддерживается в пределах линейного диапазона аналого-цифрового преобразователя для объектов, регистрируемых в широком диапазоне расстояний от системы лидара и в широком диапазоне условий окружающей среды на оптическом пути между системой лидара и регистрируемым объектом. Посредством поддержания интенсивности измеряемых возвратных импульсов в пределах линейного диапазона аналого-цифрового преобразователя избегается одновременно и низкое отношение сигнала к шуму, и насыщение.
[0013] В некоторых вариантах реализации модуль управления мощностью освещения вырабатывает управляющий сигнал, основанный на разности между желаемым уровнем интенсивности и измеряемым уровнем интенсивности. Управляющий сигнал подается на ИС драйвера освещения, что приводит к изменению посредством ИС драйвера освещения интенсивности освещения, создаваемого источником освещения, от одного дискретного уровня мощности освещения до другого. В этих вариантах реализации управляющий сигнал представляет собой цифровой сигнал, указывающий на желаемый уровень мощности освещения.
[0014] В другом объекте, модуль управления мощностью освещения определяет желаемый уровень мощности освещения на основе того, превышает ли разность интенсивности одно из значений последовательности предварительно заданных многоуровневых пороговых значений.
[0015] Значения порогов разности интенсивности представляют собой предварительно заданные значения (то есть значения известны до определения разности между желаемой и измеряемой интенсивностью возвратного импульса). В некоторых вариантах реализации значение каждого из порогов разности интенсивности сохраняется в справочной таблице. В некоторых вариантах реализации значение каждого из порогов разности интенсивности характеризуется нелинейной функцией. В некоторых вариантах реализации значение каждого из порогов разности интенсивности зависит от текущего уровня мощности. В некоторых вариантах реализации значения каждого из порогов разности интенсивности изменяются посредством постоянного масштабирующего коэффициента. В некоторых вариантах реализации значение каждого из порогов разности интенсивности зависит от того, положительна или отрицательна разность между желаемой и измеряемой интенсивностью возвратных сигналов.
[0016] Предшествующее изложение представляет собой резюме и, таким образом, содержит, по необходимости, упрощения, обобщения и исключения деталей; следовательно, специалистам в данной области техники будет понятно, что резюме является исключительно иллюстративным и никоим образом не ограничивающим. Другие объекты, признаки изобретения и преимущества описываемых здесь устройств и/или процессов будут очевидны из приведенного здесь неограничивающего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
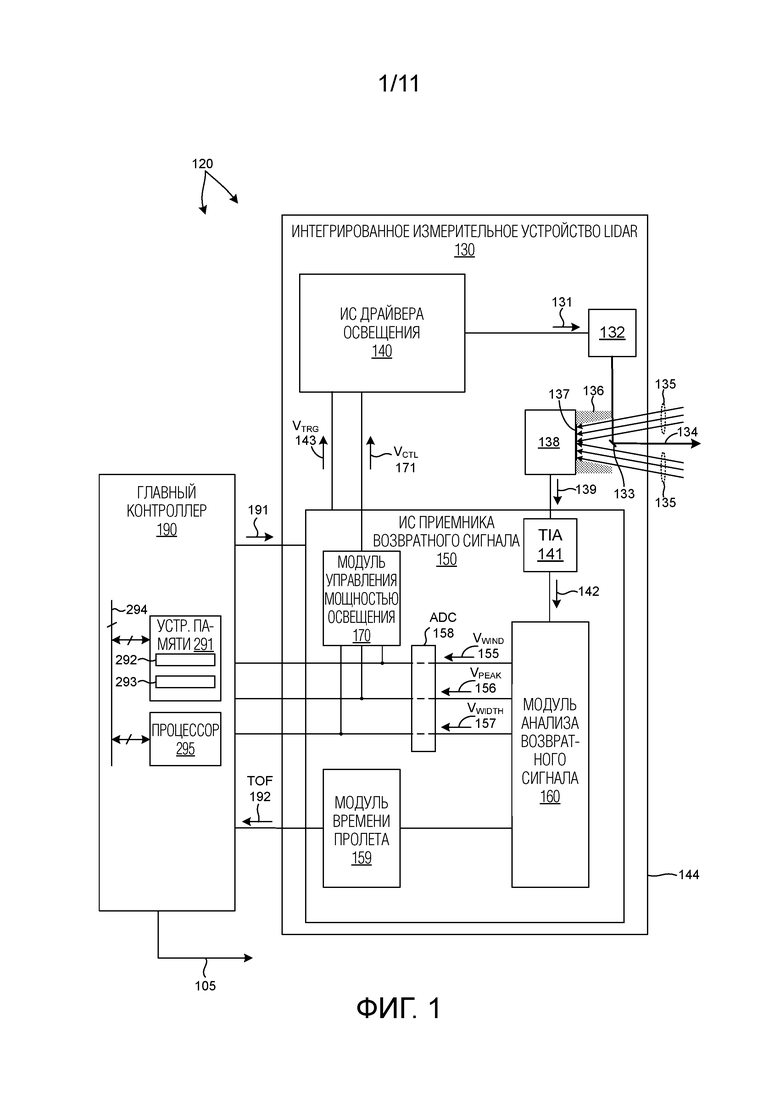
[0017] Фиг.1 изображает диаграмму, иллюстрирующую рабочий сценарий, включающий в себя систему 120 трехмерной визуализации на основе системы лидара, сконфигурированную для осуществления многоуровневого управления мощностью освещения в одном из вариантов реализации.
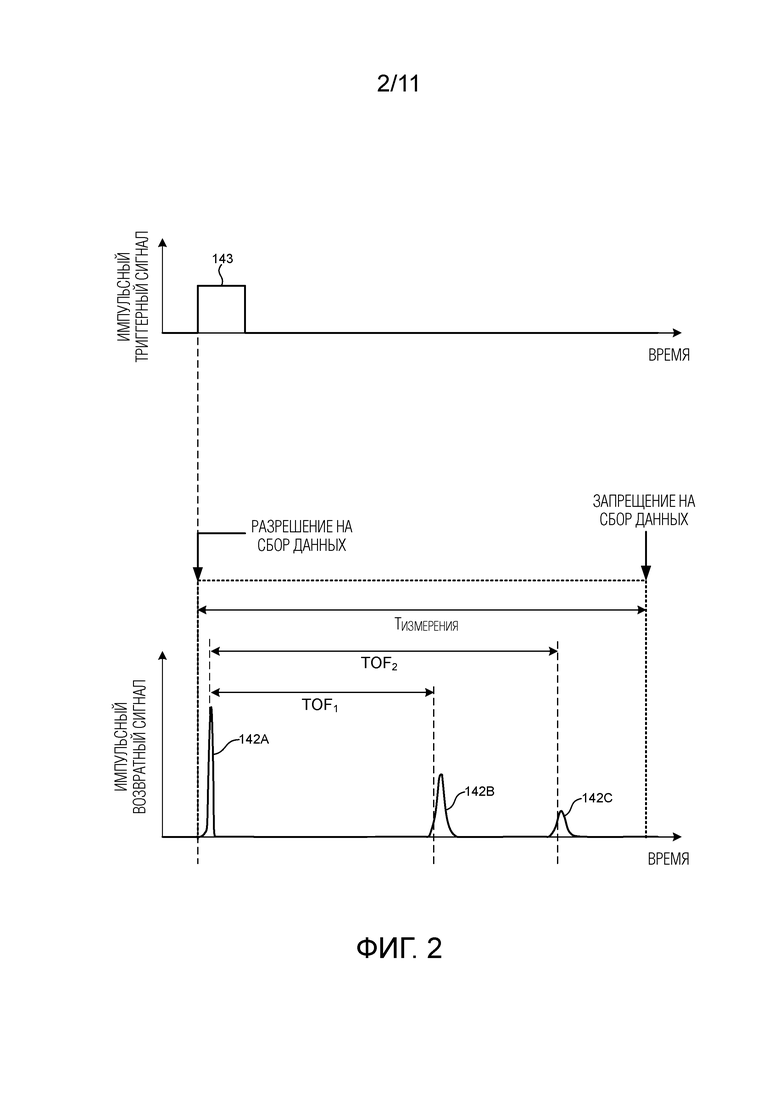
[0018] Фиг.2 - диаграмма, иллюстрирующая согласование времени, связанное с испусканием измерительного импульса интегрированным измерительным устройством 130 лидара и сбором данных возвратного измерительного импульса.
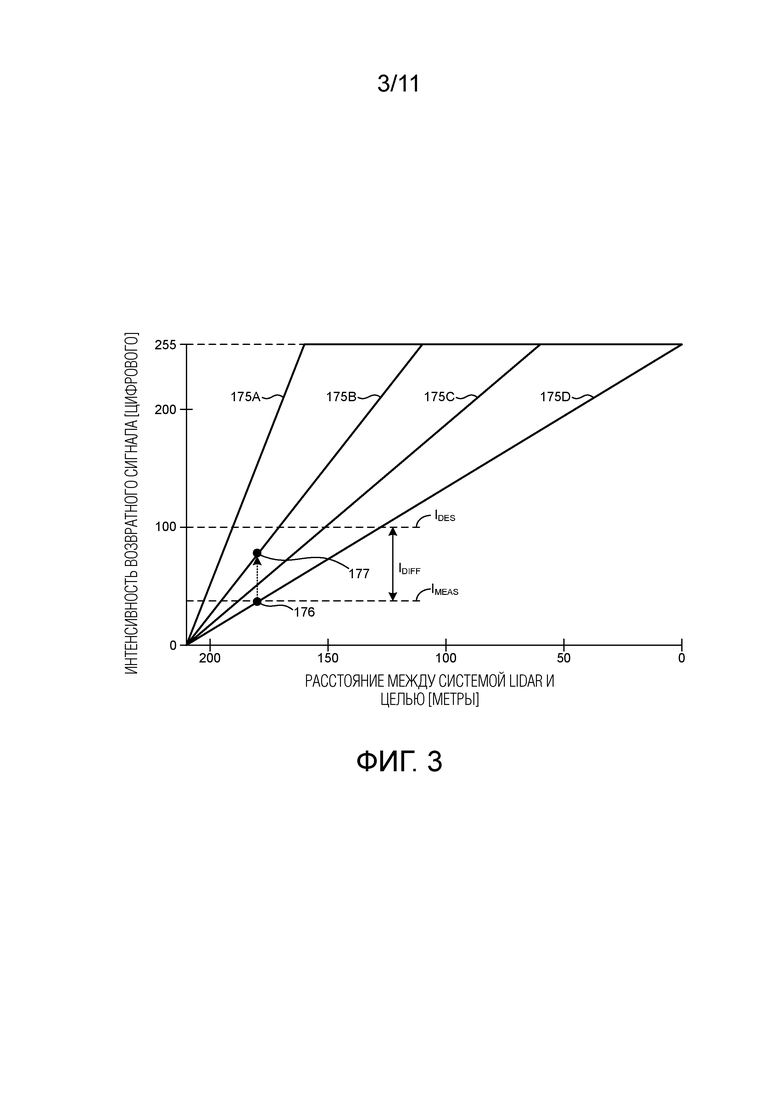
[0019] Фиг.3 - упрощенная диаграмма, иллюстрирующая интенсивность возвратного сигнала как функцию расстояния между системой лидара и объектом измерений для четырех различных уровней мощности освещения.
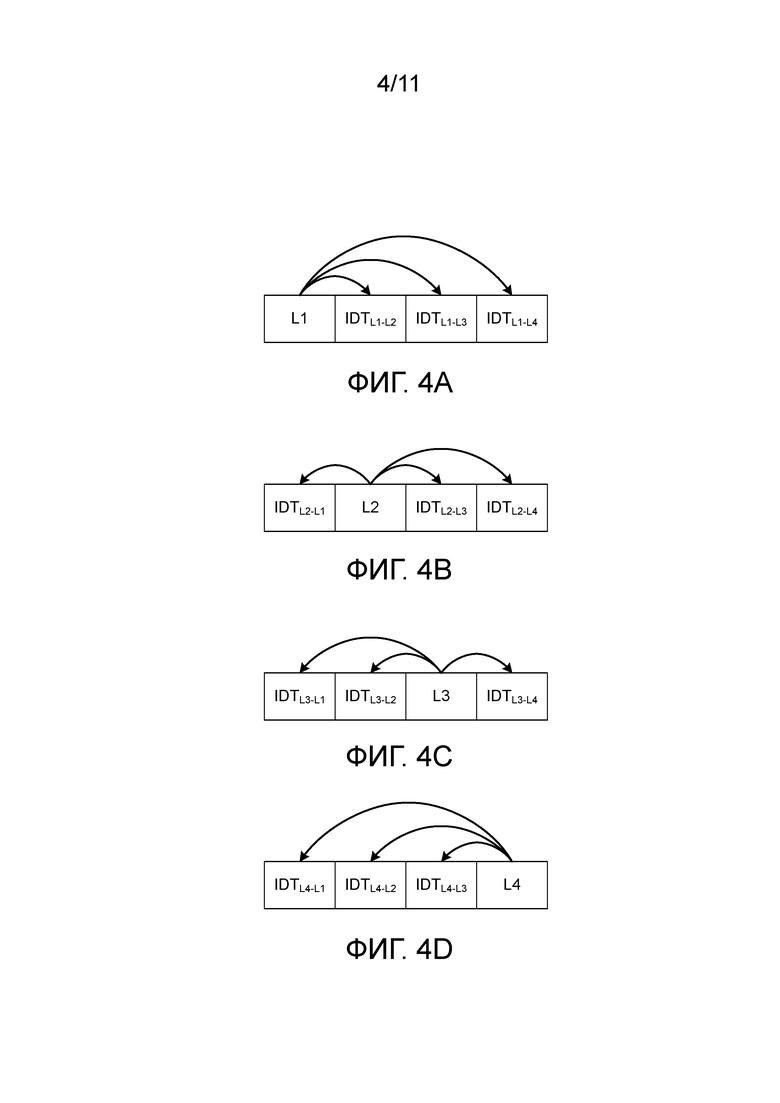
[0020] Фиг.4A-4D - иллюстрация схемы управления мощностью освещения на основе предварительно заданных пороговых значений в одном из вариантов реализации.
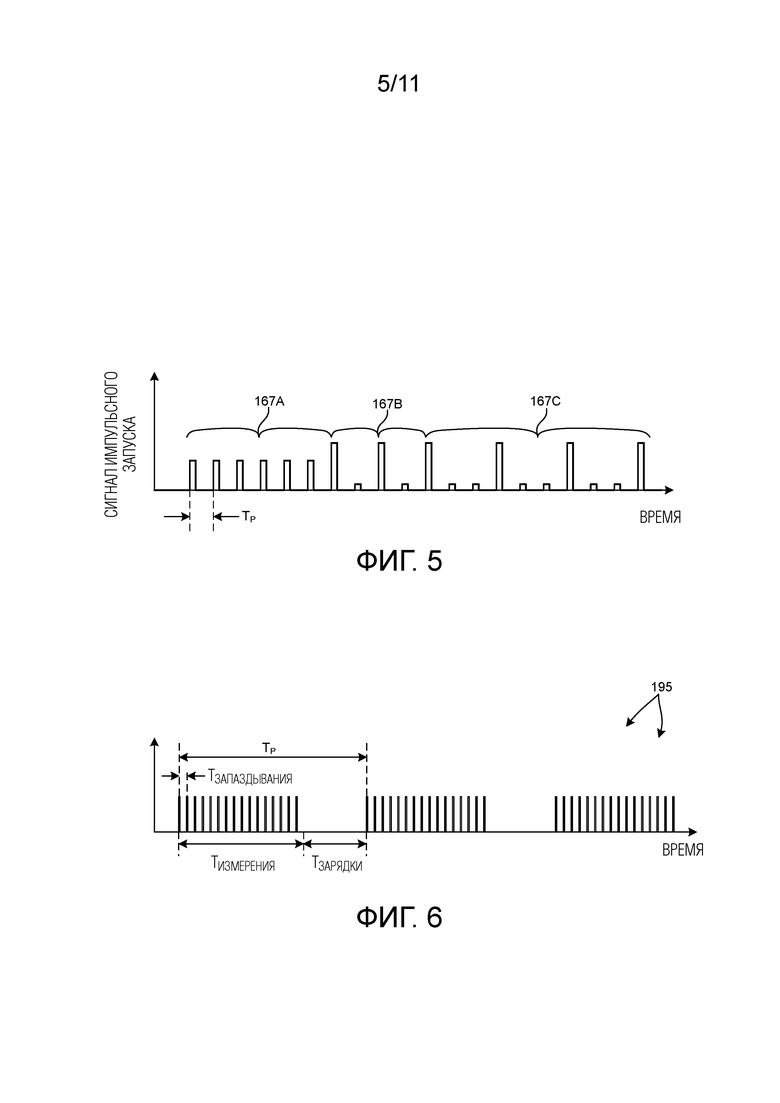
[0021] Фиг.5 - упрощенная диаграмма, иллюстрирующая три части сигнала импульсного запуска, вырабатываемого контроллером 140, который представляет собой периодический контроллер с периодом Tp.
[0022] Фиг.6 - упрощенная диаграмма, иллюстрирующая согласование времени испускания света каждым из шестнадцати интегрированных измерительных устройств лидара.
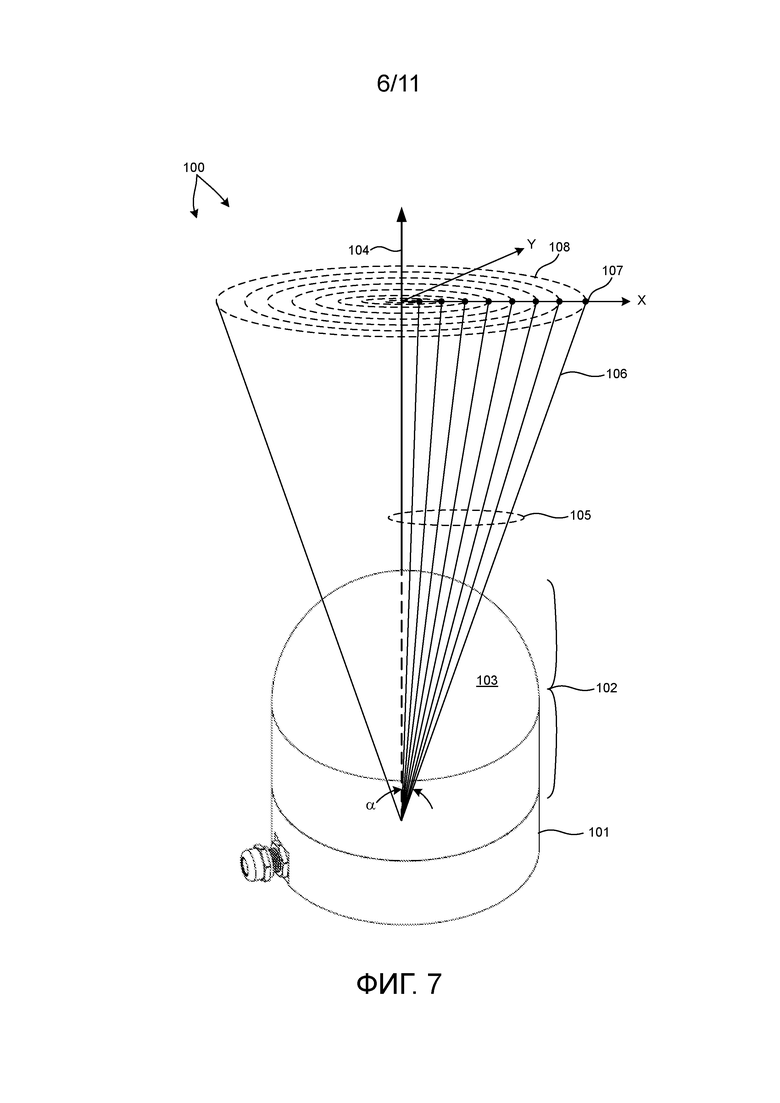
[0023] Фиг.7 - диаграмма, иллюстрирующая вариант реализации 3-D системы 100 лидара, сконфигурированной для осуществления многоуровневого управления мощностью освещения.
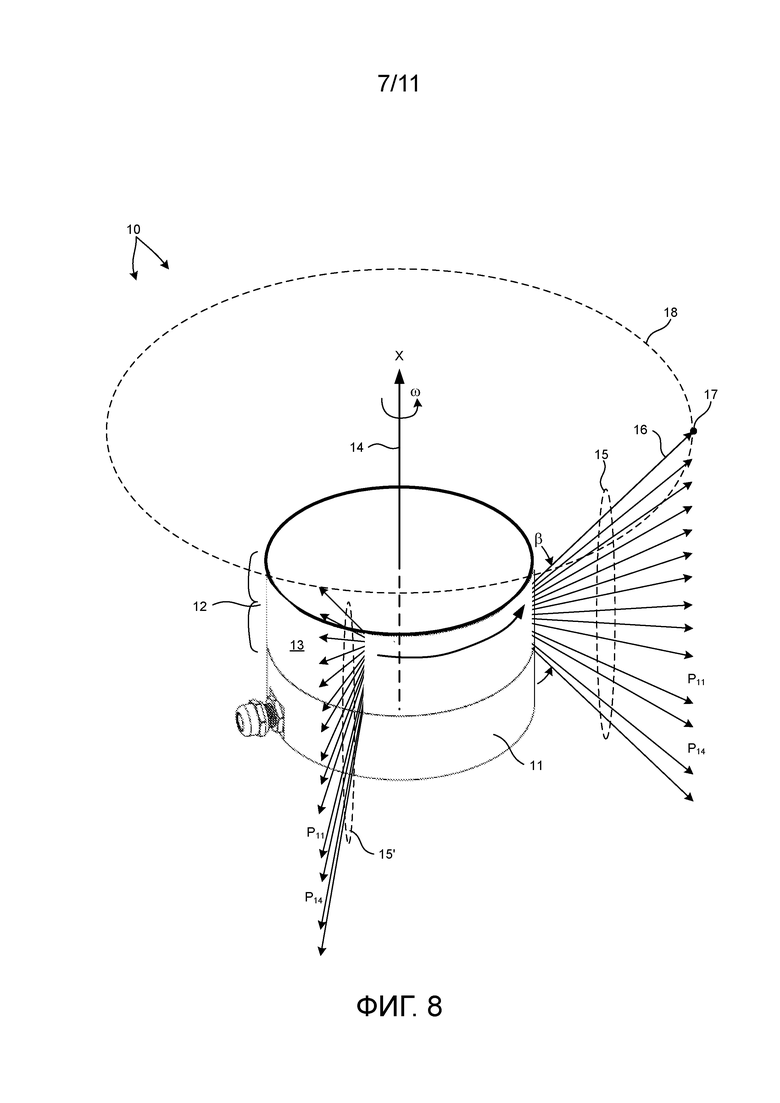
[0024] Фиг.8 - диаграмма, иллюстрирующая другой вариант реализации 3-D системы 10 лидара, сконфигурированной для осуществления многоуровневого управления мощностью освещения.
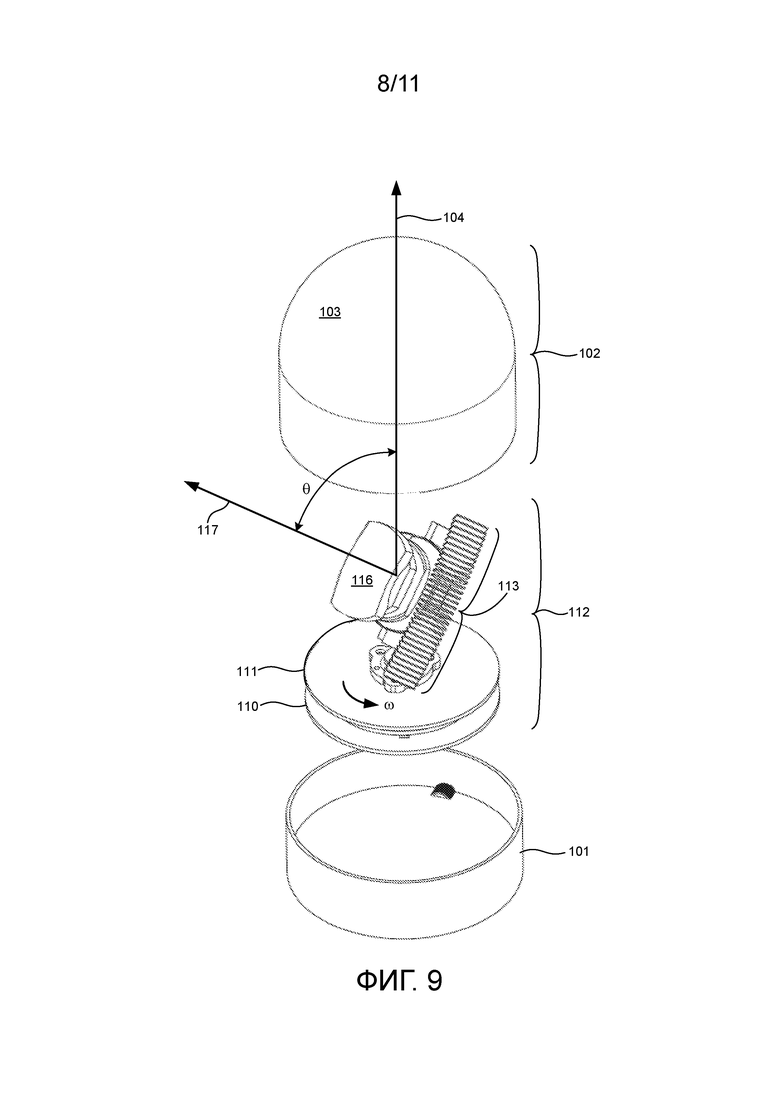
[0025] Фиг.9 - диаграмма, иллюстрирующая покомпонентное изображение 3-D системы 100 лидара в одном примерном варианте реализации.
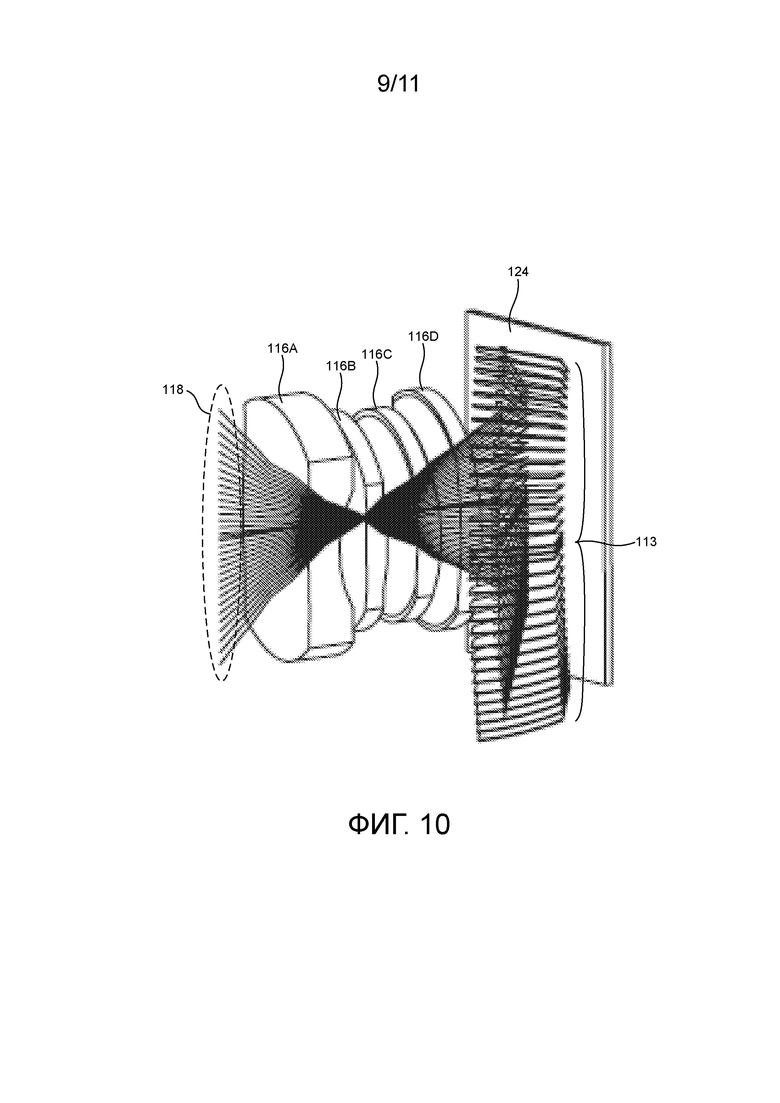
[0026] Фиг.10 - более детальный вид оптических элементов 116.
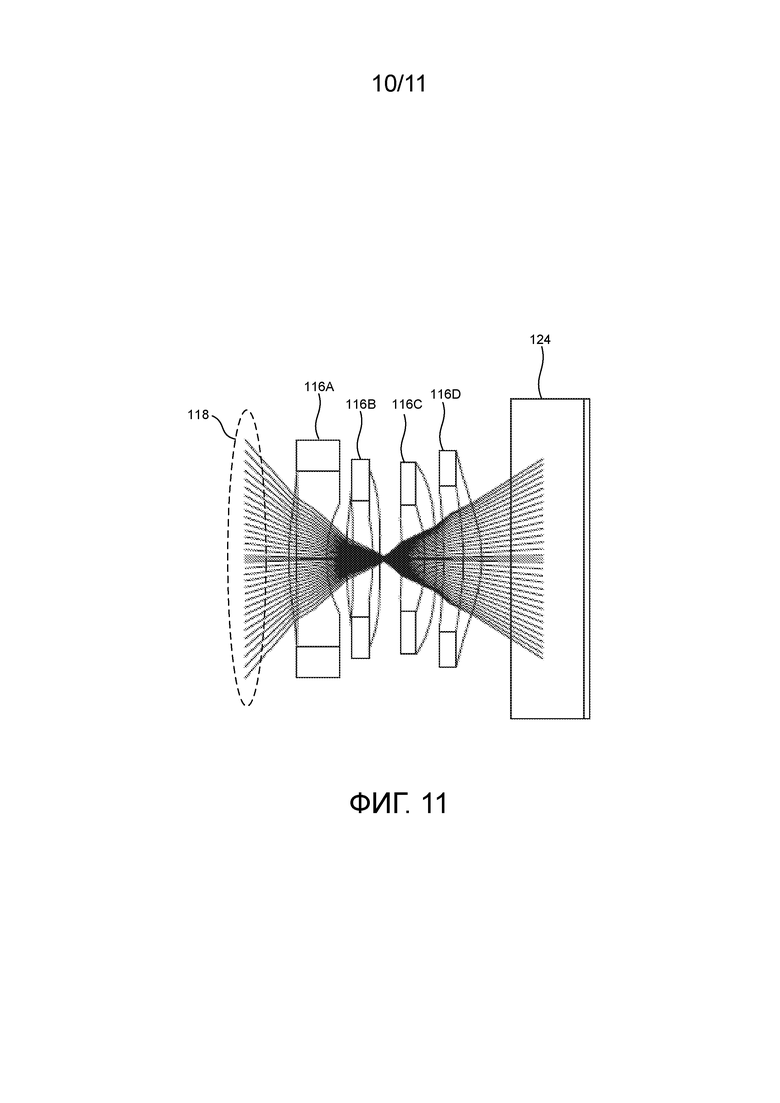
[0027] Фиг.11 - вид в разрезе оптических элементов 116 для иллюстрации придания формы каждому из пучков собираемого света 118.
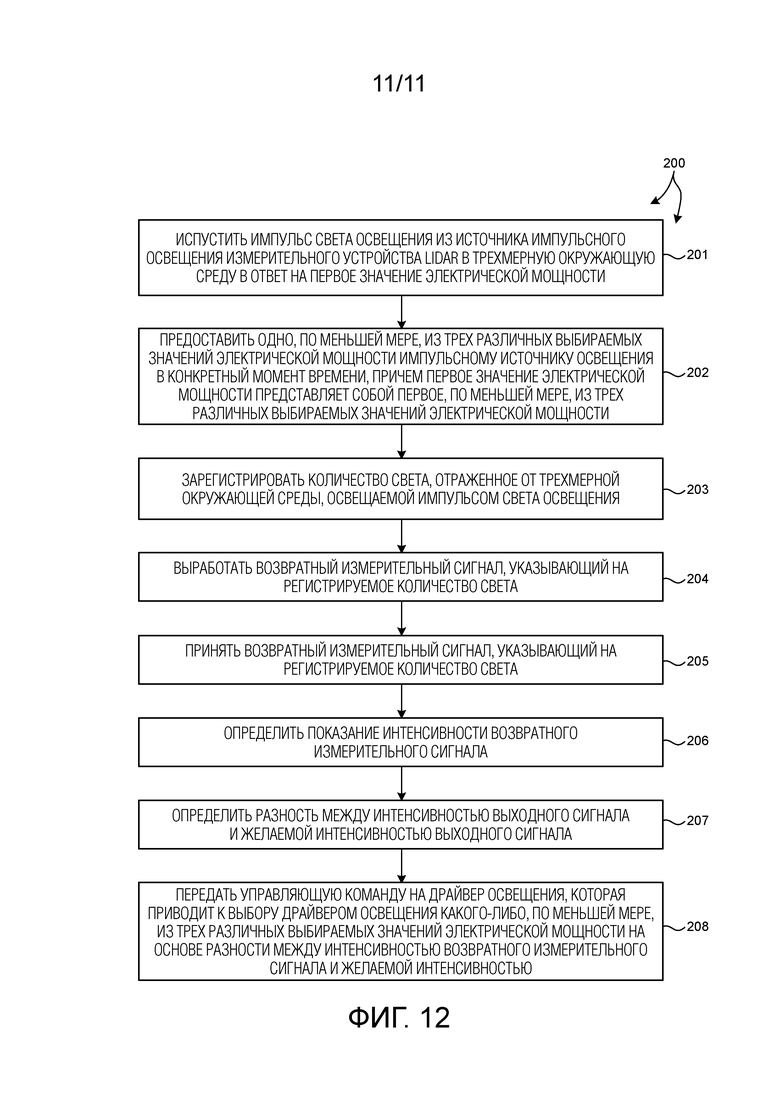
[0028] Фиг.12 - блок-схема последовательности операций, иллюстрирующая способ 200 выполнения измерения с помощью лидара посредством интегрированного измерительного устройства лидара, осуществляющего многоуровневое управление мощностью освещения по меньшей мере с одним элементом новизны изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0029] Далее будут приведены подробные ссылки на примеры по существующему уровню техники и некоторые варианты реализации изобретения, примеры которого показываются на сопровождающих чертежах.
[0030] На Фиг.1 показана измерительная система 120 лидара в одном из вариантов реализации. Измерительная система 120 лидара включает в себя главный контроллер 190 и одно или несколько интегрированных измерительных устройств 130 лидара. Интегрированное измерительное устройство 130 лидара включает в себя интегральную схему (ИС) 150 приемника возвратного сигнала, интегральную схему (ИС) 140 драйвера освещения, источник 132 освещения, фотодетектор 138 и трансимпедансный усилитель (TIA) 141. В варианте реализации, показанном на Фиг.1, каждый из этих элементов устанавливается на общей подложке 144 (например, на печатаной монтажной плате), которая обеспечивает механическую опору и электрическое соединение между элементами.
[0031] Кроме того, в некоторых вариантах реализации интегрированное измерительное устройство лидара включает в себя один или несколько источников напряжения, которые обеспечивают напряжение на электронных элементах, установленных на подложке 144, и электроэнергию для источника освещения 132. Источники напряжения могут быть сконфигурированы для подачи любого подходящего напряжения. В некоторых вариантах реализации на подложке 144 устанавливаются один или несколько источников напряжения. Однако, вообще говоря, каждый из описываемых здесь источников напряжения может быть установлен на отдельной подложке и электрически соединен с различными элементами, установленными на подложке 144, любым подходящим способом.
[0032] Главный контроллер 190 сконфигурирован для выработки импульсного командного сигнала 191, который подается на ИС 150 приемника интегрированного измерительного устройства 130 лидара. В общем случае, измерительная система лидара включает в себя ряд различных интегрированных измерительных устройств 130 лидара. В этих вариантах реализации главный контроллер 190 передает импульсный командный сигнал 191 на каждое из различных интегрированных измерительных устройств лидара. Таким образом, главный контроллер 190 координирует согласование времени измерений с помощью лидара, выполняемых любым количеством интегрированных измерительных устройств лидара.
[0033] Импульсный командный сигнал 191 представляет собой цифровой сигнал, вырабатываемый главным контроллером 190. Таким образом, согласование времени импульсного командного сигнала 191 задается посредством устройства синхронизации, связанного с главным контроллером 190. В некоторых вариантах реализации импульсный командный сигнал 191 непосредственно используется для запуска генерации импульса посредством ИС 140 драйвера освещения и сбора данных посредством ИС 150 приемника. Однако ИС 140 драйвера освещения и ИС 150 приемника не используют совместно общее устройство синхронизации с главным контроллером 190. Поэтому точная оценка времени пролета становится намного более трудоемкой в вычислительном отношении, когда импульсный командный сигнал 191 непосредственно используется для запуска генерации импульса и сбора данных.
[0034] В изображаемом варианте реализации ИС 150 приемника принимает импульсный командный сигнал 191 и вырабатывает импульсный триггерный сигнал, VTRG 143, в ответ на импульсный командный сигнал 191. Импульсный триггерный сигнал 143 передается на ИС 140 драйвера освещения и непосредственно запускает предоставление посредством ИС 140 драйвера освещения электрического импульса 131 на источник 132 освещения, который вызывает генерацию источником 132 освещения импульса 134 света освещения. Кроме того, импульсный триггерный сигнал 143 непосредственно запускает сбор данных возвратного сигнала 142 и связанное с ним вычисление времени пролета. Таким образом, импульсный триггерный сигнал 143, вырабатываемый на основе внутреннего устройства синхронизации ИС 150 приемника, используется для запуска и генерации импульса, и сбора данных возвратного импульса. Это обеспечивает точную синхронизацию генерации импульса и приема возвратного импульса, что делает возможным точное вычисление времени пролета.
[0035] Источник 132 освещения испускает измерительный импульс 134 света освещения в ответ на импульс электрического тока 131. Свет 134 освещения фокусируется и проецируется на конкретное местоположение в окружающей среде посредством одного или нескольких оптических элементов системы лидара.
[0036] В некоторых вариантах реализации источник 132 освещения представляет собой источник на основе лазера (например, лазерный диод). В некоторых вариантах реализации источник освещения основан на одном или нескольких светоизлучающих диодах. В общем случае, может быть рассмотрен любой подходящий источник импульсного освещения.
[0037] Как показано на Фиг.1, свет 134 освещения, испускаемый интегрированным измерительным устройством 130 лидара, и соответствующий возвратный измеряемый свет 135, отражаемый обратно в направлении интегрированного измерительного устройства 130 лидара, имеют общий оптический путь. Интегрированное измерительное устройство 130 лидара включает в себя фотодетектор 138, имеющий область 137 активного датчика. Как показано на Фиг.1, источник освещения 132 расположен вне поля обзора активной области 137 фотодетектора. Как показано на Фиг.1, отформованная линза 136 устанавливается поверх фотодетектора 138. Отформованная линза 136 включает в себя коническую полость, соответствующую входной угловой апертуре луча возвратного света 135. Свет 134 освещения из источника 132 освещения вводится в приемную апертуру детектора посредством волоконного световода. Оптический вентиль оптически соединяет источник 132 освещения с волоконным световодом. На конце волоконного световода зеркальный элемент 133 ориентирован под углом (например, 45 градусов) относительно световода для введения 134 света освещения в апертуру возвратного света 135. В одном из вариантов реализации торцевые стороны волоконного световода обрезаются под углом 45 градусов и покрываются высокоотражающим диэлектрическим покрытием для обеспечения зеркальной поверхности. В некоторых вариантах реализации световод включает в себя прямоугольное стеклянное ядро и полимерную оболочку с более низким показателем преломления. В некоторых вариантах реализации вся оптическая сборка окружается материалом, имеющим показатель преломления, близкий к показателю преломления полимерной оболочки. Таким образом, световод вводит свет 134 освещения во входную угловую апертуру возвратного света 135 с минимальным поглощением.
[0038] Размещение световода в пределах входной угловой апертуры возвратного света 135, проектируемого на активную область 137 датчика детектора 138, выбирается так, чтобы обеспечить максимальное перекрытие в дальнем поле пятна освещения и поля обзора детектора.
[0039] Как показано на Фиг.1, возвратный свет 135, отраженный от окружающей среды, регистрируется фотодетектором 138. В некоторых вариантах реализации фотодетектор 138 представляет собой лавинный фотодиод. Фотодетектор 138 вырабатывает выходной сигнал 139, который принимается и усиливается посредством TIA 141. Усиленный возвратный сигнал 142 передается на модуль 160 анализа возвратного сигнала. В общем случае усиление выходного сигнала 139 может включать в себя множество ступеней усиления. В этом смысле аналоговый трансимпедансный усилитель предоставляется посредством неограничивающего примера, поскольку в пределах объема притязаний данного патентного документа могут быть рассмотрены многие другие схемы усиления аналогового сигнала. Несмотря на то, что TIA 141 интегрирован с ИС 150 приемника возвратного сигнала, как показано на Фиг.1, в общем случае, TIA 141 может быть выполнен как отдельное устройство, разделенное с ИС 150 приемника. В некоторых вариантах реализации предпочтительна интеграция TIA 141 с ИС 150 приемника для сохранения места и уменьшения загрязнения сигнала.
[0040] ИС 150 приемника возвратного сигнала представляет собой смешанную ИС обработки аналогового/цифрового сигнала. В варианте реализации, показанном на Фиг.1, ИС 150 приемника возвратного сигнала включает в себя TIA 141, модуль 160 анализа возвратного сигнала, модуль 159 вычисления времени пролета, модуль 170 управления мощностью освещения и модуль 158 аналого-цифрового преобразования.
[0041] ИС 150 приемника возвратного сигнала выполняет несколько функций. В показанном на Фиг.1 варианте реализации, ИС 150 приемника идентифицирует один или несколько возвратных импульсов света, отраженного от одного или нескольких объектов окружающей среды в ответ на импульс 134 света освещения, и определяет время пролета, связанное с каждым из этих возвратных импульсов. В общем случае, выходной сигнал 139 обрабатывается посредством ИС 150 приемника возвратного сигнала для периода времени, соответствующего времени пролета света от измерительного устройства 130 лидара на расстояние, равное максимальной дальности устройства 130, и обратно до устройства 130. В течение этого периода времени импульс 134 освещения может встретить несколько объектов на различных расстояниях от интегрированного измерительного устройства 130 лидара. Таким образом, выходной сигнал 139 может включать в себя несколько импульсов, каждый из которых соответствует участку пучка 134 освещения, отраженному от различных отражающих поверхностей, расположенных на различных расстояниях от устройства 130. В другом объекте ИС 150 приемника определяет различные свойства каждого из возвратных импульсов. Как показано на Фиг.1, модуль 160 анализа возвратного сигнала определяет показание ширины каждого возвратного импульса, VWIDTH 157, определяет пиковую амплитуду каждого возвратного импульса, VPEAK 156, и делает выборку каждого волнового сигнала возвратного импульса индивидуально по окну осуществления выборки, которое включает в себя пиковую амплитуду каждого волнового сигнала возвратного импульса, VWIND 155. Эти свойства сигнала и информация о согласовании времени преобразуются в цифровые сигналы посредством ADC 158 и передаются на модуль 170 управления мощностью освещения и главный контроллер 190. Главный контроллер 190 может дополнительно обрабатывать эти данные, или передавать их непосредственно на внешнее вычислительное устройство для дополнительной обработки визуализации (например, пользователем измерительной системы 120 лидара).
[0042] На Фиг.2 показана иллюстрация согласования времени, связанного с испусканием измерительного импульса интегрированным измерительным устройством 130 лидара и захватом возвратного измерительного импульса. Как показано на Фиг.2, измерение инициируется передним краем импульсного триггерного сигнала 143, вырабатываемого посредством ИС 150 приемника. Как показано на Фиг.1 и 2, усиленный возвратный сигнал 142 вырабатывается посредством TIA 141. Как описано выше, измерительное окно (то есть период времени, по которому собираемые данные возвратного сигнала связываются с конкретным измерительным импульсом) инициируется появлением возможности сбора данных на переднем крае импульсного триггерного сигнала 143. ИС 150 приемника управляет продолжительностью измерительного окна, Tmeasurement, так, чтобы оно соответствовало временному окну, когда ожидается возвратный сигнал в ответ на испускание последовательности измерительных импульсов. В некоторых примерах измерительное окно возникает на переднем фронте импульсного триггерного сигнала 143 и пропадает в момент времени, соответствующий времени пролета света на расстояние, представляющее собой приблизительно двойную дальность действия системы лидара. Таким образом, окно измерения открыто для сбора возвратного света от объектов, смежных с системой лидара (то есть с незначительным временем пролета), до объектов, расположенных на максимальной дальности действия системы лидара. Таким образом, весь другой свет, который не может потенциально внести свой вклад в полезный возвратный сигнал, отклоняется.
[0043] Как показано на Фиг.2, возвратный сигнал 142 включает в себя три возвратных измерительных импульса, которые соответствуют испускаемому измерительному импульсу. В общем случае, регистрация сигнала выполняется для всех регистрируемых измерительных импульсов. В одном из примеров анализ сигнала может быть выполнен для идентификации самого близкого достоверного сигнала 142B (то есть первого достоверного случая возвратного измерительного импульса), самого сильного сигнала и самого дальнего достоверного сигнала 142C (то есть последнего достоверного случая возвратного измерительного импульса в окне измерения). Любой из этих случаев может рассматриваться как потенциально достоверное измерение расстояния посредством системы лидара.
[0044] Внутренние задержки в системе связаны с испусканием света системой лидара (например, задержки и время ожидания при передаче сигнала, связанные с переключающими элементами, элементами накопления энергии и импульсным светоизлучающим устройством) и задержками, связанными с собиранием света и выработкой сигналов, указывающих на собираемый свет (например, время ожидания усилителя, задержка аналого-цифрового преобразования, и т.д.) вносят свой вклад в ошибки оценки времени пролета измерительного импульса света. Таким образом, измерение времени пролета на основании прошедшего времени между передним фронтом импульсного триггерного сигнала 143 и каждым достоверным возвратным импульсом (то есть 142B и 142C) приводит к нежелательной ошибке измерения. В некоторых вариантах реализации откалиброванное, предварительно заданное, время задержки используется для компенсации электронных задержек для достижения скорректированной оценки фактического оптического времени пролета. Однако точность статической коррекции динамически изменяющихся электронных задержек ограничена. Хотя могут использоваться и частые перекалибровки, это увеличивает стоимость сложных вычислений и может повлиять на время готовности системы.
[0045] В изображаемом варианте реализации, ИС 150 приемника измеряет время пролета на основании времени, прошедшего между регистрацией регистрируемого импульса 142A вследствие внутренних перекрестных помех между источником 132 освещения и фотодетектором 138 и достоверным возвратным импульсом (например, 142B и 142C). Таким образом, систематические задержки устраняются из оценки времени пролета. Импульс 142A создается посредством внутренних перекрестных помех с эффективным отсутствием расстояния распространения света. Таким образом, задержка во времени от переднего фронта импульсного триггерного сигнала и событием регистрации импульса 142A охватывает все систематические задержки, связанные с освещением и регистрацией сигнала. Посредством измерения времени пролета достоверных возвратных импульсов (например, возвратных импульсов 142B и 142C) с обращением к регистрируемому импульсу 142A, все систематические задержки, связанные с освещением и регистрацией сигнала из-за внутренних перекрестных помех, устраняются. Как показано на Фиг.2, ИС 150 приемника оценивает время пролета, TOF1, связанное с возвратным импульсом 142B и временем пролета, TOF2, связанным с возвратным импульсом 142C с обращением к возвратному импульсу 142A.
[0046] В некоторых вариантах реализации анализ сигнала полностью выполняется посредством ИС 150 приемника. В этих вариантах реализации сигналы 192 времени пролета передаются от интегрированного измерительного устройства 130 лидара, включающего в себя индикацию времени пролета каждого возвратного импульса, определяемую посредством ИС 150 приемника. В некоторых вариантах реализации сигналы 155-157 включают в себя информацию о волновом сигнале, связанной с каждым возвратным импульсом, вырабатываемую посредством ИС 150 приемника. Эта волновая информация о волновом сигнале может быть обработана дополнительно одним или несколькими процессорами, смонтированными на 3-D системе лидара, или внешними по отношению к 3-D системе лидара, для достижения другой оценки расстояния, оценки одного из нескольких физических свойств обнаруженного объекта, или их комбинации.
[0047] В одном из объектов интенсивность освещения импульсным пучком света освещения, испускаемым системой лидара, изменяется на основе интенсивности измеряемых возвратных импульсов. Таким образом, интенсивность измеряемых возвратных импульсов поддерживается в пределах линейного диапазона аналого-цифрового преобразователя для объектов, обнаруживаемых в широком диапазоне расстояний от системы лидара и в широком диапазоне условий окружающей среды на оптическом пути между системой лидара и обнаруживаемым объектом. Посредством поддержания интенсивности измеряемых возвратных импульсов в пределах линейного диапазона аналого-цифрового преобразователя, одновременно можно избежать малого отношения сигнала к шуму и насыщения.
[0048] На Фиг.3 показан иллюстративный график интенсивности возвратного сигнала как функции расстояния между системой лидара и объектом измерения для четырех различных уровней мощности освещения 175A-D. Как показано на Фиг.3, интенсивность возвратного сигнала представляет собой 8-битовое цифровое значение, указывающее на интенсивность измеряемого возвратного сигнала 139. Однако, в общем случае, интенсивность возвратного сигнала может быть характеризована посредством любого подходящего цифрового или аналогового сигнала.
[0049] Как показано на Фиг.3, диапазон расстояний измерения, находящийся в пределах линейного диапазона измерительной системы, изменяется в зависимости от уровня мощности освещения. Например, как показано на Фиг.3, линия 175A графика характеризует ответ измерительной системы лидара при относительно высоком уровне мощности. При этом уровне мощности высокое отношение сигнал-шум (например, интенсивность сигнала больше чем пятьдесят) ожидается при измеряемых расстояниях между 200 метрами и 160 метрами. Однако при расстояниях менее 160 метров измерительная система лидара насыщается. При уменьшенных уровнях 175B, 175C, и 175D мощности система лидара насыщается на все меньших расстояниях, но за счет снижения отношения сигнала к шуму (то есть снижения интенсивности сигнала) для данного расстояния.
[0050] Интенсивность возвратного сигнала может быть определена самым различным образом. В варианте реализации, показанном на Фиг.1, модуль 160 анализа возвратного сигнала определяет ширину каждого из возвратных импульсов, VWIDTH 157, пиковую амплитуду каждого из возвратных импульсов, VPEAK 156, и окно осуществления выборки, которое включает в себя пиковую амплитуду каждого волнового сигнала возвратного импульса, VWIND 155. Эти свойства сигнала и информация о согласовании времени синхронизации преобразуются в цифровые сигналы посредством аналого-цифрового преобразователя 158 и передаются на модуль 170 управления мощностью освещения. В одном из вариантов реализации модуль 170 управления мощностью освещения определяет интенсивность возвратного сигнала как пиковую амплитуду каждого возвратного импульса, VPEAK 156. В другом варианте реализации модуль 170 управления мощностью освещения определяет интенсивность возвратного сигнала как усредненное значение пиковой амплитуды каждого возвратного импульса в пределах окна выборки, VWIND 155. В другом варианте реализации модуль 170 управления мощностью освещения определяет интенсивность возвратного сигнала как среднее значение пиковой амплитуды каждого возвратного импульса в пределах окна выборки, VWIND 155. В другом варианте реализации модуль 170 управления мощностью освещения определяет интенсивность возвратного сигнала как комбинацию пикового значения, VPEAK 156, и ширины импульса, VWIDTH 157, связанных с каждым возвратным импульсом. В общем случае, любая подходящая индикация интенсивности возвратного сигнала 139 может быть рассмотрено в пределах объема притязаний данного патентного документа.
[0051] В некоторых других вариантах реализации модуль 160 анализа возвратного сигнала передает любое из значений VWIDTH 157, VPEAK 156 и VWIND 155 как аналоговый сигнал (без преобразования посредством ADC 158). В этих вариантах реализации модуль 170 управления мощностью освещения определяет желаемый уровень мощности освещения на основании аналоговых сигналов.
[0052] Примерное измерение 176 интенсивности, IMEAS, возвратного сигнала показано на Фиг.3. Как показано на Фиг.3, измеряемая интенсивность, IMEAS, значительно ниже желаемого уровня интенсивности, IDES. В примере, показанном на Фиг.3, желаемый уровень интенсивности находится вблизи середины диапазона ADC 158 (то есть при значении 100 цифрового сигнала).
[0053] В одном из объектов модуль 170 управления мощностью освещения вырабатывает управляющий сигнал, VCTL 171, на основании разности, IDIFF, между желаемым уровнем интенсивности, IDES, и измеряемым уровнем интенсивности, IMEAS. Сигнал VCTL 171 подается на ИС 140 драйвера освещения и приводит к увеличению, посредством ИС 140 драйвера освещения, интенсивности пучка 134 освещения, создаваемого источником 132 освещения, от уровня мощности освещения, связанного с линией 175D графика, до более высокого уровня мощности освещения, связанного с линией 175B графика. Как показано на Фиг.3, ожидаемая измеряемая интенсивность 177 при наибольшем уровне мощности намного ближе к желаемому уровню интенсивности.
[0054] В одном из вариантов реализации VCTL 171 представляет собой цифровой сигнал, указывающий на желаемый уровень мощности освещения. В этом варианте реализации ИС 140 драйвера освещения регулирует уровень мощности освещения до желаемого уровня мощности в ответ на значение VCTL 171. В одном из вариантов реализации VCTL 171 представляет собой 4-битовое дискретное число, указывающее на любой из шестнадцати различных уровней мощности в зависимости от значения VCTL 171. Однако в общем случае в пределах объема притязаний данного патентного документа может быть рассмотрено любое количество различных дискретных уровней мощности освещения.
[0055] В другом объекте модуль 170 управления мощностью освещения определяет желаемый уровень мощности освещения на основании того, превышает ли разность интенсивности, IDIFF, одно из значений последовательности предварительно заданных многоуровневых пороговых значений.
[0056] На Фиг.4A-4D показана иллюстрация схемы управления мощностью освещения на основе предварительно заданных пороговых значений в одном из вариантов реализации. В примере, показанном на Фиг.4A-4D, измерительная система лидара включает в себя четыре уровня мощности освещения, L1, L2, L3 и L4, в порядке возрастания мощности освещения. В одном из примеров L1 (самый низкий уровень мощности) соответствует кривой 175D отклика системы, показанной на Фиг.3, L2 соответствует кривой 175C отклика системы, L3 соответствует кривой 175B отклика системы и L4 соответствует кривой 175A отклика системы.
[0057] Как показано на Фиг.4A, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL1-L2, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L1 до L2. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL1-L3, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L1 до L3. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL1-L4, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L1 до L4.
[0058] Как показано на Фиг.4B, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL2-L3, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L2 до L3. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL2-L4, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L2 до L4. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL2-L1, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к уменьшению драйвером 140 освещения мощности освещения от L2 до L1.
[0059] Как показано на Фиг.4C, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL3-L4, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L3 до L4. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL3-L2, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к уменьшению драйвером 140 освещения мощности освещения от L3 до L2. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL3-L1, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к уменьшению драйвером 140 освещения мощности освещения от L3 до L1.
[0060] Как показано на Фиг.4D, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL4-L3, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к уменьшению драйвером 140 освещения мощности освещения от L4 до L3. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL4-L2, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L4 до L2. Аналогично, если разность между желаемой интенсивностью возвратного сигнала и измеряемой интенсивностью возвратного сигнала превышает порог разности интенсивности, IDTL4-L1, модуль 170 управления мощностью освещения передает значение управляющего сигнала, VCTL 171, что приводит к увеличению драйвером 140 освещения мощности освещения от L4 до L1.
[0061] Значения порогов разности интенсивности представляют собой предварительно заданные значения (то есть значения известны до определения разности между желаемой и измеряемой интенсивностью возвратного импульса). В некоторых вариантах реализации значение каждого порога разности интенсивности сохраняется в справочной таблице. В некоторых вариантах реализации значение каждого порога разности интенсивности характеризуется нелинейной функцией. В некоторых вариантах реализации, значение каждого порога разности интенсивности зависит от текущего уровня мощности. В некоторых вариантах реализации, значения каждого порога разности интенсивности изменяются посредством постоянного масштабирующего коэффициента. В некоторых вариантах реализации значение каждого порога разности интенсивности зависит от того, положительна или отрицательна разность между желаемой и измеряемой интенсивностью возвратных сигналов.
[0062] В варианте реализации, показанном на Фиг.1, модуль 170 управления мощностью освещения вырабатывает цифровой сигнал VCTL 171 для передачи желаемого уровня мощности освещения на ИС 140 драйвера освещения 140. Однако, в некоторых других вариантах реализации, модуль 170 управления мощностью освещения вырабатывает один или несколько аналоговых сигналов, которые передаются на ИС 140 драйвера освещения, что вызывает генерацию посредством ИС 140 драйвера освещения импульсов 134 освещения с желаемым уровнем мощности освещения. В одном из примеров модуль 170 управления мощностью освещения передает аналоговый управляющий сигнал амплитуды, VAMP, на ИС 140 драйвера освещения. В ответ ИС 140 драйвера освещения изменяет амплитуду импульса на основании принимаемого значения VAMP. В другом примере модуль 170 управления мощностью освещения передает аналоговый амплитудный управляющий сигнал, VPWC, на ИС 140 драйвера освещения. В ответ ИС 140 драйвера освещения изменяет продолжительность импульса освещения на основании принимаемого значения VPWC.
[0063] На Фиг.5 показаны три области сигнала импульсного запуска, создаваемого контроллером 140, которые периодичны с периодом Tp. В области 167A интенсивность импульса для шести последовательных импульсов поддерживается при постоянном среднем значении. В области 167B интенсивность импульса чередуется между высокой установкой интенсивности и низкой установкой интенсивности для шести последовательных импульсов. В области 167C интенсивность импульса поддерживается высокой для одного импульса, затем низкой для двух следующих друг за другом импульсов для десяти последовательных импульсов. В общем случае, система лидара может быть сконфигурирована для изменения интенсивности импульса любым желаемым образом, на основе схемы “импульс за импульсом” или в группах импульсов, для поддержания интенсивности возвратного сигнала в пределах линейного диапазона измерительной системы лидара.
[0064] В дополнительном варианте реализации система лидара, такая как показанная на Фиг.8 система 10 лидара, включает в себя ряд интегрированных измерительных устройств лидара, работающих согласованно с общим контроллером (например, контроллером 190). На Фиг.6 показана примерная диаграмма 195, показывающая согласование времени испускания света каждым из шестнадцати интегрированных измерительных устройств лидара. В другом дополнительном объекте управление регулярной структурой импульсов света освещения, испускаемых каждой системой импульсного освещения, происходит независимо. Таким образом, возможно независимое управление регулярной структурой, связанной с каждой системой импульсного освещения.
[0065] Как показано на Фиг.6, последовательность измерительных импульсов испускается первым интегрированным измерительным устройством лидара. После времени задержки, TDELAY, последовательность измерительных импульсов испускается вторым интегрированным измерительным устройством лидара. Таким образом, последовательность шестнадцати измерительных импульсов испускается в различных направлениях от устройства лидара в течение периода измерения, TMEASUREMENT. Элементы накопления электроэнергии, связанные с каждой из шестнадцати систем импульсного освещения, заряжаются после периода измерения в течение периода зарядки, TCHARGE. После периода зарядки каждой системой импульсного освещения в течение последующего периода измерения испускается другая последовательность измерительных импульсов.
[0066] В некоторых вариантах реализации время задержки устанавливается большим, чем время пролета последовательности измерительных импульсов до, и от, объекта, расположенного на максимальной дальности действия устройства лидара. Таким образом, между какой-либо из шестнадцати импульсных систем освещения отсутствуют перекрестные помехи.
[0067] В некоторых других вариантах реализации измерительный импульс может быть испущен одной системой импульсного освещения прежде, чем пройдет время, за которое измерительный импульс, испускаемый другой системой импульсного освещения, возвращается к устройству лидара. В некоторых из этих вариантов реализации принимаются меры для обеспечения достаточного пространственного разделения между областями окружающей среды, исследуемыми каждым пучком, для избегания перекрестных помех.
[0068] В другом объекте главный контроллер сконфигурирован для выработки множества импульсных командных сигналов, каждый из которых передается на различное интегрированное измерительное устройство лидара. Каждая ИС приемника возвратного импульса вырабатывает соответствующий импульсный управляющий сигнал, основанный на принимаемом импульсном командном сигнале.
[0069] На Фиг.7-9 показаны 3-D системы лидара, которые включают в себя множество интегрированных измерительных устройств лидара. В некоторых вариантах реализации время задержки устанавливается между запуском каждого из интегрированных измерительных устройств лидара. В некоторых примерах время задержки больше, чем время пролета последовательности измерительных импульсов до и от объекта, расположенного на максимальной дальности действия устройства лидара. Таким образом, отсутствуют перекрестные помехи среди любого из интегрированных измерительных устройств лидара. В некоторых других примерах, измерительный импульс испускается одним интегрированным измерительным устройством лидара прежде, чем пройдет время, за которое измерительный импульс, испускаемый другим интегрированным измерительным устройством лидара, возвращается к устройству лидара. В этих вариантах реализации принимаются меры для обеспечения достаточного пространственного разделения между областями окружающей среды, исследуемыми каждым пучком для избегания перекрестных помех.
[0070] На Фиг.7 показана диаграмма, иллюстрирующая вариант реализации 3-D системы 100 лидара в одной примерной рабочей ситуации. 3-D система 100 лидара включает в себя нижний отсек 101 и верхний отсек 102, который включает в себя элемент 103 куполообразной оболочки, созданный из прозрачного для инфракрасного света материала (например, для света, имеющего длину волны в пределах спектрального диапазона 700-1700 нанометров). В одном из примеров, элемент 103 куполообразной оболочки прозрачен для света в некотором диапазоне длин волн с центром 905 нанометров.
[0071] Как показано на Фиг.7, множество пучков 105 света испускается 3-D системой 100 лидара через элемент 103 куполообразной оболочки в угловом диапазоне α, измеряемом от центральной оси 104. В варианте реализации, показанном на Фиг.7, каждый пучок света проектируется на плоскость, заданную осями x и y в множестве различных расположений, разнесенных друг от друга. Например, пучок 106 проектируется на xy-плоскость в местоположении 107.
[0072] В варианте реализации, показанном на Фиг.7, 3-D система 100 лидара сконфигурирована для сканирования каждым из множества пучков 105 света около центральной оси 104. Каждый пучок света, проектируемый на xy-плоскость, описывает круговую структуру, с центром в точке пересечения центральной оси 104 и xy-плоскости. Например, со временем, пучок 106, проектируемый на xy-плоскость, описывает круговую траекторию 108, с центром на центральной оси 104.
[0073] На Фиг.8 показана диаграмма, иллюстрирующая другой вариант реализации 3-D системы 10 лидара в одном примерной рабочей ситуации. 3-D система 10 лидара включает в себя нижний отсек 11 и верхний отсек 12, который включает в себя элемент 13 цилиндрической оболочки, созданный из прозрачного для инфракрасного света материала (например, для света, имеющего длину волны в пределах спектрального диапазона 700-1700 нанометров). В одном из примеров элемент 13 цилиндрической оболочки прозрачен для света в диапазоне длин волн с центром 905 нанометров.
[0074] Как показано на Фиг.8, множество пучков света 15 испускается 3-D системой 10 лидара через элемент 13 цилиндрической оболочки в угловом диапазоне β. В варианте реализации, показанном на Фиг.8, показан главный луч каждого из пучков света. Каждый из пучков света проектируется наружу в окружающую среду по множеству различных направлений. Например, пучок 16 проектируется на местоположение 17 в окружающей среде. В некоторых вариантах реализации каждый из пучков света, испускаемых системой 10, несколько отклоняется. В одном из примеров пучок света, испускаемый системой 10, освещает пятно размером 20 сантиметров в диаметре на расстоянии 100 метров от системы 10. Таким образом, каждый из пучков света освещения представляет собой конус света освещения, испускаемого системой 10.
[0075] В варианте реализации, показанном на Фиг.8, 3-D система 10 лидара сконфигурирована для сканирования каждым из множества пучков света 15 вокруг центральной оси 14. В целях иллюстрации, пучки света 15 показаны в одной угловой ориентации относительно не вращающейся системы координат 3-D системы 10 лидара, а пучки света 15' показаны в другой угловой ориентации относительно не вращающейся системы координат. Поскольку пучки света 15 вращаются вокруг центральной оси 14, каждый из пучков света, проектируемых в окружающую среду (например, каждый конус света освещения, связанный с каждым из пучков) освещает объем среды, соответствующий пучку освещения, имеющему форму конуса, поскольку он перемещается вокруг центральной оси 14.
[0076] На Фиг.9 показан покомпонентный вид 3-D системы 100 лидара в одном примерном варианте реализации. 3-D система 100 лидара дополнительно включает в себя механизм 112 испускания/сбора света, который вращается вокруг центральной оси 104. В варианте реализации, показанном на Фиг.9, центральная оптическая ось 117 механизма 112 испускания/сбора света наклонена под углом θ относительно центральной оси 104. Как показано на Фиг.9, 3-D система 100 лидара включает в себя стационарную электронную плату 110, установленную неподвижно относительно нижнего отсека 101. Вращающаяся электронная плата 111 расположена выше стационарной электронной платы 110 и сконфигурирована так, чтобы вращаться относительно стационарной электронной платы 110 с предварительно заданной скоростью вращения (например, более 200 оборотов в минуту). Сигналы электропитания и электронные сигналы передаются между стационарной электронной платой 110 и вращающейся электронной платой 111 через один или несколько трансформаторов, емкостных или оптических элементов, приводящих к бесконтактной передаче этих сигналов. Механизм 112 испускания/сбора света неподвижно установлен относительно вращающейся электронной платы 111 и, таким образом, вращается вокруг центральной оси 104 с предварительно заданной угловой скоростью ω.
[0077] Как показано на Фиг.9, механизм 112 испускания/сбора света включает в себя матрицу интегрированных измерительных устройств 113 лидара. В одном из объектов каждое интегрированное измерительное устройство лидара включает в себя светоизлучающий элемент, элемент регистрации света, и соответственную электронику управления и преобразования сигналов, объединенную на общей подложке (например, на печатной монтажной плате или другой электронной монтажной плате).
[0078] Свет, испускаемый каждым интегрированным измерительным устройством лидара, проходит через ряд оптических элементов 116, которые коллимируют испускаемый свет для создания пучка света освещения, проектируемого из 3-D системы лидара в окружающую среду. Таким образом, матрица пучков 105 света, каждый из которых испускается различными измерительными устройствами лидара, испускается 3-D системой 100 лидара, как показано на Фиг.9. В общем случае, любое количество измерительных устройств лидара может быть размещено для одновременного испускания любого числа пучков света 3-D системой 100 лидара. Свет, отраженный от объекта в среде за счет ее освещения конкретным измерительным устройством лидара, собирается посредством оптических элементов 116. Собранный свет проходит через оптические элементы 116, где он фокусируется на регистрирующий элемент того же самого, конкретного измерительного устройства лидара. Таким образом, собираемый свет, связанный с освещением различных участков среды освещением, созданным различными измерительными устройствами лидара, раздельно фокусируется на детектор каждого соответствующего измерительного устройства лидара.
[0079] На Фиг.10 показан более подробный вид оптических элементов 116. Как показано на Фиг.10, оптические элементы 116 включают в себя четыре линзовых элемента 116A-D, размещенных так, чтобы фокусировать собираемый свет 118 на каждый из детекторов матрицы интегрированных измерительных устройств 113 лидара. В показанном на Фиг.10 варианте реализации, свет, проходящий через оптические элементы 116, отражается от зеркала 124 и направляется на каждый из детекторов матрицы интегрированных измерительных устройств 113 лидара. В некоторых вариантах реализации один или несколько оптических элементов 116 созданы из одного или нескольких материалов, поглощающих свет вне предварительно заданного диапазона длин волн. Предварительно заданный диапазон длин волн включает в себя длины волн света, испускаемого матрицей интегрированных измерительных устройств 113 лидара. В одном из примеров один или несколько линзовых элементов созданы из пластмассового материала, который включает в себя добавку красителя для поглощения света, имеющего длины волн менее, чем инфракрасный свет, создаваемый каждой из матриц интегрированных измерительных устройств 113 лидара. В одном из примеров, краситель представляет собой Epolight 7276A, предоставляемый Aako BV (Нидерланды). В общем случае, любое число различных красителей может быть добавлено к любому из пластмассовых линзовых элементов оптических элементов 116 для фильтрации нежелательных спектральных компонент.
[0080] На Фиг.11 показан вид в разрезе оптических элементов 116 для иллюстрации придания определенной формы каждому из пучков собираемого света 118.
[0081] Таким образом, система лидара, такая как 3-D система 10 лидара, показанная на Фиг.8, и система 100, показанная на Фиг.7, включает в себя множество интегрированных измерительных устройств лидара, каждое из которых испускает импульсный пучок света освещения устройством лидара в окружающую среду и измеряет возвратный свет, отраженный от объектов в окружающей среде.
[0082] В некоторых вариантах реализации, таких как варианты реализации, описываемые в связи с Фиг.7 и Фиг.8, матрица интегрированных измерительных устройств лидара устанавливается на вращающемся каркасе устройства лидара. Этот вращающийся каркас вращается относительно основного каркаса устройства лидара. Однако, в общем случае, матрица интегрированных измерительных устройств лидара может быть выполнена подвижной любым подходящим образом (например, с помощью карданового подвеса, смещения/наклона, и т.д.) или - неподвижной относительно основного каркаса устройства лидара.
[0083] В некоторых других вариантах реализации каждое из интегрированных измерительных устройств лидара включает в себя элемент, направляющий пучок (например, сканирующее зеркало, зеркало MEMS и т.д.), который сканирует пучок освещения, создаваемый интегрированным измерительным устройством лидара.
[0084] В некоторых других вариантах реализации каждое из двух или нескольких интегрированных измерительных устройств лидара испускает пучок света освещения к устройству сканирующего зеркала (например, зеркалу MEMS), которое отражает пучки в окружающую среду в различных направлениях.
[0085] В дополнительном объекте один или несколько интегрированных измерительных устройств лидара находятся в оптической связи с оптическим устройством модуляции фазы, которое направляет луч(и) освещения, создаваемые одним или несколькими интегрированными измерительными устройствами лидара, в различных направлениях. Оптическое устройство модуляции фазы представляет собой активное устройство, которое принимает управляющий сигнал, приводящий к изменению состояния оптического устройства модуляции фазы и, таким образом, к изменению направления света, дифрагированного из оптического устройства модуляции фазы. Таким образом, луч(и) освещения, создаваемые одним или несколькими интегрированными устройствами лидара, осуществляют сканирование посредством множества различных ориентаций и эффективно исследуют окружающую 3-D среду при измерении. Дифрагированные пучки, проектируемые в окружающую среду, взаимодействуют с объектами в среде. Каждое соответствующее интегрированное измерительное устройство лидара измеряет расстояние между измерительной системой лидара и регистрируемым объектом на основании собираемого возвратного света от объекта. Оптическое устройство модуляции фазы располагается на оптическом пути между интегрированным измерительным устройством лидара и измеряемым объектом в окружающей среде. Таким образом, и свет освещения и соответствующий возвратный свет проходят через оптическое устройство модуляции фазы.
[0086] На Фиг.12 показана блок-схема последовательности операций способа 200, подходящего для выполнения посредством измерительной системы лидара, как это здесь описано. В некоторых вариантах реализации измерительные системы 10, 100, и 120 лидара работают в соответствии со способом 200, показанным на Фиг.23. Однако, в общем случае, выполнение способа 200 не ограничивается вариантами реализации систем измерения 10, 100, и 120 лидара, описываемыми в связи с Фиг.8, 7, и 1, соответственно. Эти иллюстрации и соответствующее объяснение предоставляются посредством примера, поскольку могут быть рассмотрены многие другие варианты реализации и примеры работы.
[0087] В блоке 201 импульс света освещения испускается импульсным источником освещения измерительного устройства лидара в трехмерную среду в ответ на первое значение электрической мощности.
[0088] В блоке 202 одно по меньшей мере из трех различных выбираемых значений электрической мощности предоставляется для источника импульсного освещения в конкретный момент времени. Первое значение электрической мощности представляет собой первое по меньшей мере из трех различных выбираемых значений электрической мощности.
[0089] В блоке 203 регистрируется количество света, отраженное от трехмерной среды, освещаемой импульсом света освещения.
[0090] В блоке 204 вырабатывается возвратный измерительный сигнал, указывающий на зарегистрированное количество света.
[0091] В блоке 205 принимается возвратный измерительный сигнал, указывающий на зарегистрированное количество света.
[0092] В блоке 206 определяется показание интенсивности возвратного измерительного сигнала.
[0093] В блоке 207 определяется разность между интенсивностью выходного сигнала и желаемой интенсивностью выходного сигнала.
[0094] В блоке 208 управляющая команда подается на драйвер освещения, что приводит к выбору драйвером освещения одного по меньшей мере из трех различных выбираемых значений электрической мощности на основании разности между интенсивностью возвратного измерительного сигнала и желаемой интенсивностью.
[0095] В общем случае, термины "интегральная схема", "главный контроллер" и "вычислительная система" могут быть определены так широко, чтобы охватить любое устройство, имеющее один или несколько процессоров, которые выполняют команды из носителя памяти.
[0096] Главный контроллер 190 или любая внешняя вычислительная система могут включать в себя, но без ограничения, систему персонального компьютера, систему универсальной ЭВМ, рабочую станцию, компьютер для обработки изображений, параллельный процессор или любое другое устройство, известное в данной области техники.
[0097] Следует понимать, что различные шаги, описываемые посредством настоящего раскрытия, могут быть выполнены посредством ИС 150 приемника возвратного сигнала, ИС 140 драйвера освещения, главного контроллера 190 или другой компьютерной системы. Кроме того, различные подсистемы измерительной системы 120 лидара могут включать в себя компьютерную систему, подходящую для выполнения по меньшей мере участка шагов, описываемых здесь. Поэтому вышеупомянутое описание не должно интерпретироваться как ограничение для настоящего изобретения, но исключительно как иллюстрация.
[0098] В одном из примеров программные команды 292, осуществляющие способы, такие как описанные здесь способы, могут быть переданы через передающую среду, такую как провод, кабель или соединение для беспроводной передачи. Например, как показано на Фиг.1, программные команды 292, сохраняемые в устройстве памяти 291, передаются на процессор 295 по шине 294. Программные команды 292 сохраняются на машиночитаемом носителе (например, устройстве памяти 291). Примерные машиночитаемые носители включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, магнитный или оптический диск, или магнитную ленту.
[0099] Как показано на Фиг.1, программные команды 292, устройство памяти 291, процессор 295 и шина 294 выполняются как часть главного контроллера 190. Однако в других примерах программные команды, осуществляющие способы, такие как описываемые здесь способы, устройства памяти, один или несколько процессоров и шины выполняются как часть ИС 150 приемника возвратного сигнала. В некоторых примерах программные команды, осуществляющие способы, такие как описываемые здесь способы, устройства памяти, один или несколько процессоров и шины также выполняются как часть ИС 140 драйвера освещения.
[0100] В общем случае, ИС 150 приемника возвратного сигнала, ИС 140 драйвера освещения и главный контроллер 190 могут быть соединены с возможностью связи с другими устройствами любым образом, известным в данной области техники. Например, главный контроллер 190 может быть соединен с ИС 150 приемника возвратного сигнала, связанной с интегрированным измерительным устройством 130 лидара.
[0101] Главный контроллер 190 может быть сконфигурирован для приема и/или сбора данных или информации от интегрированного измерительного устройства 130 лидара посредством передающей среды, которая может включать в себя проводную линию и/или беспроводные участки. Таким образом, передающая среда может служить каналом передачи данных между главным контроллером 190 и другими подсистемами измерительной системы 120 лидара.
[0102] Главный контроллер 190 может быть сконфигурирован для приема и/или сбора данных или информации (например, результатов измерений с помощью лидара, сжатых наборов данных, сегментированных наборов данных, наборов признаков, и т.д.) от других систем посредством передающей среды, которая может включать в себя проводную линию и/или беспроводные участки. Таким образом, передающая среда может служить в качестве канала передачи данных между главным контроллером 190 и другими системами (например, устройствами памяти, встроенными в измерительную систему 120 лидара, внешними устройствами памяти или внешними системами). Например, главный контроллер 190 может быть сконфигурирован для передачи данных 293 об измерениях (например, информации 105 визуализации с помощью лидара) от носителя данных (то есть устройства памяти 291) к внешней вычислительной системе через канал передачи данных. Кроме того, главный контроллер 190 может принимать данные от других систем через передающую среду. Например, характеристические карты и информация о местоположении, определяемая главным контроллером 190, могут быть сохранены в постоянном или полупостоянном устройстве памяти (например, в устройстве памяти 291). В связи с этим результаты измерений могут быть экспортированы в другую систему.
[0103] В одном или нескольких примерных вариантах реализации описываемые функции могут быть осуществлены в аппаратном обеспечении, программном обеспечении, встроенном программном обеспечении или в любой их комбинации. Если они осуществляются в программном обеспечении, функции могут быть сохранены на машиночитаемом носителе, или переданы как одна или несколько команд или код на машиночитаемом носителе. Машиночитаемые носители включают в себя и компьютерные носители данных, и средства связи, включающие в себя любой носитель, который способствует передаче компьютерной программы из одного места в другое. Носители данных могут быть любыми доступными носителями, к которым возможен доступ посредством универсального или специализированного компьютера. В качестве примера, но без ограничения, такие машиночитаемые носители могут содержать RAM, ROM, EEPROM, CD-ROM или другой накопитель на оптических дисках, накопитель на магнитных дисках или другие магнитные запоминающие устройства, или любой другой носитель, который может использоваться для переноса или хранения средств желаемого программного кода в форме команд или структур данных, и к которым возможен доступ посредством универсального или специализированного компьютера, или универсального или специализированного процессора. Кроме того, любое соединение соответствующим образом называют машиночитаемой средой. Например, если программное обеспечение передается с вебсайта, сервера или другого удаленного источника с использованием коаксиального кабеля, оптоволоконного кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные, радио- и микроволновые технологии, то коаксиальный кабель, оптоволоконный кабель, витая пара, цифровая абонентская линия или беспроводные технологии, такие как инфракрасные, радио- и микроволновые технологии, включаются в определение среды. Используемый здесь термин "диск" включает в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск и диск стандарта blu-ray, причем диски обычно воспроизводят данные как магнитные данные, вместе с тем диски могут воспроизводить данные как оптические данные, с помощью лазеров. Комбинации вышеупомянутых сред также должны быть включены в пределы термина “машиночитаемые среды”.
[0104] Несмотря на то, что некоторые конкретные варианты реализации описываются выше в методических целях, пояснения этого патентного документа имеют общую применимость и не ограничиваются описанными выше конкретными вариантами реализации. Соответственно, различные модификации, адаптации и комбинации различных признаков описываемых вариантов реализации могут быть осуществлены без отступления от объема притязаний изобретения, который устанавливается посредством пунктов формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАРНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2744932C1 |
| ОЦЕНКА РАССТОЯНИЯ С ИСПОЛЬЗОВАНИЕМ ОСВЕТИТЕЛЬНОГО УСТРОЙСТВА С РАСЩЕПЛЕННЫМ ПУЧКОМ | 2012 |
|
RU2617912C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И ИДЕНТИФИКАЦИИ ФОРМЫ И СТРУКТУРЫ ОБЪЕКТА | 2020 |
|
RU2750681C1 |
| ДЕТЕКТИРОВАНИЕ НАЛИЧИЯ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ОСВЕТИТЕЛЬНОГО УСТРОЙСТВА С РАСЩЕПЛЕННЫМ ПУЧКОМ | 2012 |
|
RU2610426C2 |
| МНОГОКАНАЛЬНЫЙ LIDAR-ФОРМИРОВАТЕЛЬ ОБЛУЧЕНИЯ | 2019 |
|
RU2778356C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПИТАНИЯ ДЛЯ ВОЗБУЖДЕНИЯ ТВЕРДОТЕЛЬНОЙ ОСВЕТИТЕЛЬНОЙ НАГРУЗКИ | 2011 |
|
RU2574341C2 |
| МОДУЛЬ ТВЕРДОТЕЛЬНОГО ОСВЕЩЕНИЯ, ЦЕПЬ ОСВЕЩЕНИЯ И СПОСОБЫ УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2016 |
|
RU2656875C1 |
| ПОРТАТИВНЫЙ СВЕТИЛЬНИК | 2013 |
|
RU2653064C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2017 |
|
RU2749609C2 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
Использование: описываются способы и системы для управления мощностью освещения системы трехмерной визуализации на базе системы лидара, основанные на дискретных уровнях мощности освещения. Сущность: в одном из объектов интенсивность освещения импульсного пучка света освещения, испускаемого системой лидара, изменяется в соответствии с набором уровней мощности освещения на основании различия между желаемым и измеренным возвратным импульсом. В дополнительном объекте, уровень мощности освещения выбирается на основании того, превышает ли разность интенсивности одно из значений последовательности предварительно заданных многоуровневых пороговых значений. Таким образом, интенсивность измеряемых возвратных импульсов поддерживается в пределах линейного диапазона аналого-цифрового преобразователя для объектов, регистрируемых в широком диапазоне расстояний от системы лидара и в широком диапазоне условий окружающей среды на оптическом пути между системой лидара и регистрируемым объектом. Технический результат: обеспечение управлением мощности излучения. 3 н. и 17 з.п. ф-лы, 12 ил.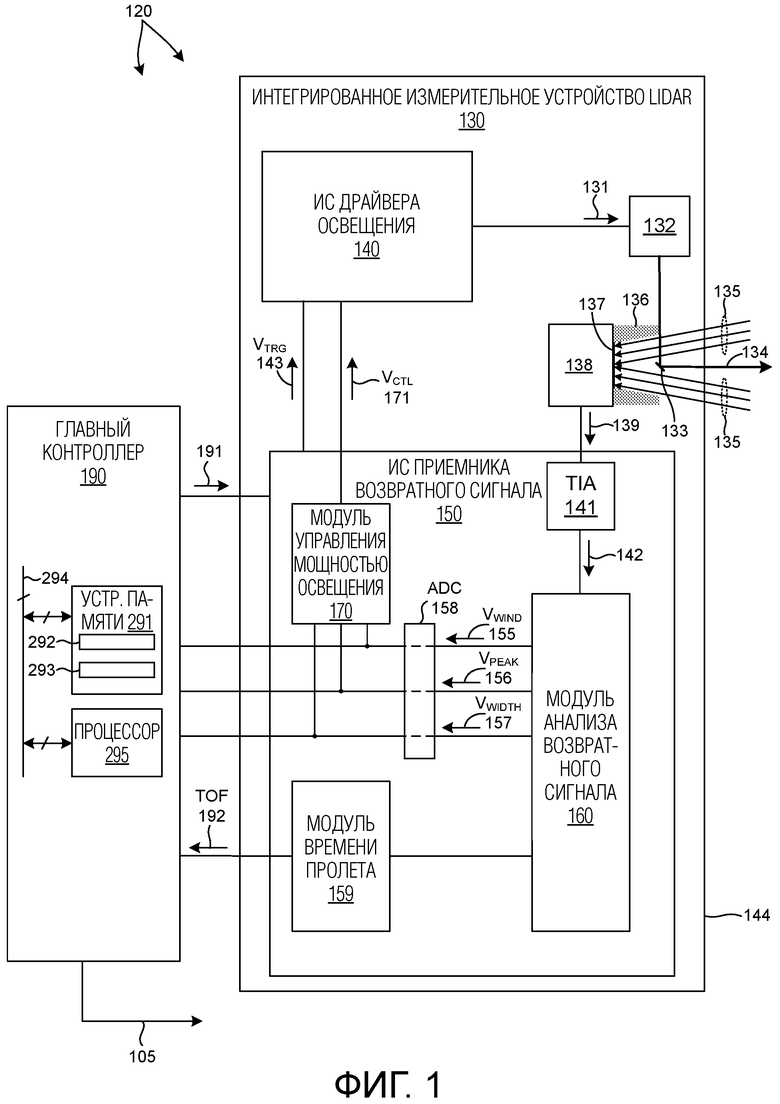
1. Устройство обнаружения и определения дальности с помощью света, содержащее:
a. источник импульсного освещения, выполненный с возможностью испускать импульс света освещения от устройства лидара в трехмерную среду в ответ на первое значение электрической мощности;
b. драйвер освещения, выполненный с возможностью предоставления одного по меньшей мере из трех различных выбираемых значений электрической мощности для источника импульсного освещения в конкретное время, причем первое значение электрической мощности представляет собой первое по меньшей мере из трех различных выбираемых значений электрической мощности;
c. фоточувствительный детектор, выполненный с возможностью регистрировать количество света, отраженного от трехмерной среды, освещаемой импульсом света освещения, и создавать возвратный измерительный сигнал, указывающий на регистрируемое количество света; и
i. вычислительную систему, сконфигурированную для:
ii. приема возвратного измерительного сигнала, указывающего на регистрируемое количество света;
iii. определения показания измеренной интенсивности возвратного измерительного сигнала;
iv. определения разности между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала;
v. сравнения разности между измеренной и желаемой интенсивностями возвратного измерительного сигнала с множеством пороговых значений, при этом множество пороговых значений выбирают на основе первого значения электрической мощности, и при этом желаемое значение электрической мощности выбирается из по меньшей мере трех различных выбираемых значений электрической мощности на основании того, какое пороговое значение из множества пороговых значений превышается разностью между измеренной и желаемой интенсивностями возвратного измерительного сигнала;
vi. передачи управляющей команды на драйвер освещения, которая приводит к выбору драйвером освещения желаемого значения электрической мощности.
2. Устройство обнаружения и определения дальности с помощью света по п.1, причем второе значение электрической мощности по меньшей мере из трех различных выбираемых значений электрической мощности превышает первое значение электрической мощности, и причем третье значение электрической мощности по меньшей мере из трех различных выбираемых значений электрической мощности превышает второе значение электрической мощности, и причем управляющая команда приводит к выбору драйвером освещения второго значения электрической мощности, когда разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала превышает первое пороговое значение из множества пороговых значений, и причем управляющая команда приводит к выбору драйвером освещения третьего значения электрической мощности, когда разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала превышает второе пороговое значение из множества пороговых значений.
3. Устройство обнаружения и определения дальности с помощью света по п.2, причем первое и второе пороговое значение зависят от первого значения электрической мощности.
4. Устройство обнаружения и определения дальности с помощью света по п.2, причем первое и второе пороговые значения изменяются посредством постоянного масштабирующего коэффициента.
5. Устройство обнаружения и определения дальности с помощью света по п.2, причем первое и второе пороговые значения зависят от того, представляет ли собой разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала положительное значение или отрицательное значение.
6. Устройство обнаружения и определения дальности с помощью света по п.2, причем первое и второе пороговые значения характеризуются нелинейной функцией.
7. Устройство обнаружения и определения дальности с помощью света по п.2, причем возвратный измерительный сигнал включает в себя один или несколько возвратных измерительных импульсов, и причем показание измеренной интенсивности возвратного измерительного сигнала представляет собой пиковое значение одного или нескольких возвратных измерительных импульсов.
8. Устройство обнаружения и определения дальности с помощью света по п.2, причем возвратный измерительный сигнал включает в себя один или несколько возвратных измерительных импульсов, и причем показание измеренной интенсивности возвратного измерительного сигнала представляет собой усредненное значение или среднее значение одного или нескольких возвратных измерительных импульсов.
9. Измерительная лидарная система, содержащая:
a. источник импульсного освещения, выполненный с возможностью испускать импульс света освещения от устройства лидара в трехмерную среду в ответ на первое значение электрической мощности;
b. драйвер освещения, сконфигурированный для предоставления одного по меньшей мере из трех различных выбираемых значений электрической мощности для источника импульсного освещения в конкретный момент времени, причем первое значение электрической мощности представляет собой первое по меньшей мере из трех различных выбираемых значений электрической мощности;
c. фоточувствительный детектор, выполненный с возможностью регистрировать количество света, отраженное от трехмерной среды, освещаемой импульсом света освещения, и создавать возвратный измерительный сигнал, указывающий на регистрируемое количество света; и
d. компьютерно-читаемые команды, сохраняемые на долговременном компьютерно-читаемом носителе, компьютерно-читаемые команды содержат:
i. код, приводящий к приему вычислительной системой возвратного измерительного сигнала, указывающего на регистрируемое количество света;
ii. код, приводящий к определению вычислительной системой показания измеренной интенсивности возвратного измерительного сигнала;
iii. код, приводящий к определению вычислительной системой разности между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратный измерительный сигнал;
iv. код, вынуждающий компьютерную систему сравнивать разницу между измеренной и желаемой интенсивностью возвратного измерительного сигнала с множеством пороговых значений, при этом множество пороговых значений выбирают на основе первого значения электрической мощности, и при этом желаемое значение электрической мощности выбирается из по меньшей мере трех различных выбираемых значений электрической мощности на основании того, какое пороговое значение из множества пороговых значений превышается разностью между измеренной и желаемой интенсивностями возвратного измерительного сигнала; и
v. код, вынуждающий компьютерную систему передавать управляющей команды на драйвер освещения, что приводит к выбору драйвером освещения желаемого значения электрической мощности.
10. Измерительная лидарная система по п.9, причем второе значение электрической мощности по меньшей мере из трех различных выбираемых значений электрической мощности превышает первое значение электрической мощности, и причем третье значение электрической мощности по меньшей мере из трех различных выбираемых значений электрической мощности превышает второе значение электрической мощности, и причем управляющая команда приводит к выбору драйвером освещения второго значения электрической мощности, когда разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала превышает первое пороговое значение из множества пороговых значений, и причем управляющая команда приводит к выбору драйвером освещения третьего значения электрической мощности, когда разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала превышает второе пороговое значение из множества пороговых значений.
11. Измерительная лидарная система по п.10, причем первое и второе пороговые значения зависят от первого значения электрической мощности.
12. Измерительная лидарная система по п.10, причем первое и второе пороговые значения изменяются посредством постоянного масштабирующего коэффициента.
13. Измерительная лидарная система по п.10, причем первое и второе пороговые значения зависит от того, представляет ли собой разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала положительное значение или отрицательное значение.
14. Измерительная лидарная система по п.10, причем первое и второе пороговые значения характеризуются нелинейной функцией.
15. Измерительная лидарная система по п.10, причем возвратный измерительный сигнал включает в себя один или несколько возвратных измерительных импульсов, и причем показание измеренной интенсивности возвратного измерительного сигнала представляет собой пиковое значение одного или нескольких возвратных измерительных импульсов.
16. Измерительная лидарная система по п.10, причем возвратный измерительный сигнал включает в себя один или несколько возвратных измерительных импульсов, и причем показание измеренной интенсивности возвратного измерительного сигнала представляет собой усредненное значение или среднее значение одного или нескольких возвратных измерительных импульсов.
17. Способ работы измерительной лидарной системы, содержащий:
a. испускание импульса света освещения источником импульсного освещения измерительного лидарного устройства в трехмерную среду в ответ на первое значение электрической мощности;
b. предоставление одного по меньшей мере из трех различных выбираемых значений электрической мощности для источника импульсного освещения в конкретный момент времени, причем первое значение электрической мощности представляет собой первое по меньшей мере из трех различных выбираемых значений электрической мощности;
c. регистрацию количества света, отраженного от трехмерной среды, освещаемой импульсом света освещения;
d. генерацию возвратного измерительного сигнала, указывающего на регистрируемое количество света;
e. прием возвратного измерительного сигнала, указывающего на регистрируемое количество света;
f. определение показания измеренной интенсивности возвратного измерительного сигнала;
g. определение разности между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала;
h. сравнение разности между измеренной и желаемой интенсивностями возвратного измерительного сигнала с множеством пороговых значений, при этом множество пороговых значений выбирают на основе первого значения электрической мощности, и при этом желаемое значение электрической мощности выбирается из по меньшей мере трех различных выбираемых значений электрической мощности на основании того, какое пороговое значение из множества пороговых значений превышается разностью между измеренной и желаемой интенсивностями возвратного измерительного сигнала; и
i. передачу управляющей команды на драйвер освещения, что приводит к выбору драйвером освещения желаемого значения электрической мощности.
18. Способ по п.17, причем второе значение электрической мощности по меньшей мере из трех различных выбираемых значений электрической мощности превышает первое значение электрической мощности, и причем третье значение электрической мощности по меньшей мере из трех различных выбираемых значений электрической мощности превышает второе значение электрической мощности, и причем управляющая команда приводит к выбору драйвером освещения второго значения электрической мощности, когда разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала превышает первое пороговое значение из множества пороговых значений, и причем управляющая команда приводит к выбору драйвером освещения третьего значения электрической мощности, когда разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала превышает второе пороговое значение из множества пороговых значений.
19. Способ по п.18, причем первое и второе пороговые значения зависят от того, представляет ли собой разность между измеренной интенсивностью возвратного измерительного сигнала и желаемой интенсивностью возвратного измерительного сигнала положительное значение или отрицательное значение.
20. Способ по п.18, причем возвратный измерительный сигнал включает в себя один или несколько возвратных измерительных импульсов, и причем показание измеренной интенсивности возвратного измерительного сигнала представляет собой пиковое значение, и усредненное значение или среднее значение одного или нескольких возвратных измерительных импульсов.
| US 20170269197 A1, 21.09.2017 | |||
| EP 3151036 А1, 05.04.2017 | |||
| US 20090303099 A1, 10.12.2009 | |||
| US 20120038903 A1, 16.02.2012 | |||
| US 8767190 B2, 01.07.2014. |

