Изобретение касается лидарного измерительного устройства (LIDAR, англ. Light Identification Detection and Ranging, обнаружение, идентификация и определение дальности с помощью света), а также способа определения скорости частичек в измерительном объеме. При помощи описанного устройства, а также способа реализуется измерение скорости ветра в удаленном измерительном объеме с помощью узкополосного непрерывно излучающего лазерного источника света. Свет, испускаемый узкополосным непрерывно излучающим лазерным источником света, вводится в измерительную ветвь и референтную ветвь, при этом по меньшей мере часть введенного в измерительную ветвь света по меньшей мере частично с помощью передающего устройства излучается в направлении измерительного объема таким образом, что излучаемый свет по меньшей мере частично рассеивается и/или отражается частичками в измерительном объеме, так что по меньшей мере часть рассеянного и/или отраженного света принимается приемным устройством. Наконец, на этот принятый рассеянный или, соответственно, отраженный свет когерентно накладывается свет, выходящий из референтной ветви, и получающееся отсюда световое излучение направляется на детектор для создания характерного для этого результирующего светового излучения сигнала детектора. В блоке аналитической оценки с учетом сигнала детектора определяется скорость частичек в измерительном объеме.
Вообще, уже много лет известны наземные способы измерения для определения скорости ветра и направления ветра для различных областей высот атмосферы, например, для контроля промышленных эмитентов вредных веществ, для прогноза погоды, а также для атмосферного и климатического исследования. В этой связи применяются, например, так называемые содарные (SODAR, англ. SOnic Detection And Ranging, акустический детектор и дальномер) измерительные системы для измерений ветра, при этом они используют эффект Доплера у звуковых волн, которые рассеиваются обратно из атмосферы. В связи с использованием силы ветра, приобретающим все более важное значение, в последние годы возникла новая значительная область применения для таких способов измерения для измерения скорости и направления ветра в удаленных от собственно измерительного устройства областях. Наряду с известными содарными системами, в последнее время для таких измерений применяются так называемые лидарные измерительные системы, у которых вместо звука используется свет, и которые частично превосходят содар.
Лидар (LIDAR, Light detection and ranging) представляет собой родственный радару метод оптического измерения расстояния и скорости, а также замера атмосферных параметров. Лидарные системы для атмосферного измерения испускают лазерное излучение и обнаруживают рассеиваемый обратно из атмосферы свет. По времени прохождения света сигналов рассчитывается дальность места рассеяния. В частности, облака и частички пыли в воздухе рассеивают лазерный свет и делают возможной высокоразрешающую селекцию и измерение дальности облаков и аэрозольных слоев.
Далее, с помощью лидарных систем можно путем замера света, который рассеивается или, соответственно, отражается от движимых ветром частиц, определять скорость ветра, действующую в удаленном от измерительного устройства месте. Этот вид измерения может, в частности, использоваться для того, чтобы измерять действующую перед ветроэнергетической установкой скорость ветра при дальности до нескольких 100 м и на базе измеренной скорости ветра адаптировать технические параметры регулирования ветроэнергетической установки. Тем самым должно гарантироваться, с одной стороны, как наиболее эффективное возможное использование ветроэнергетической установки, а с другой стороны, защита установки от избыточных нагрузок вследствие особых событий, связанных с ветром. Таким образом, например, при экстремальных порывах ветра могут своевременно вводиться аварийные меры, чтобы в значительной степени предотвращать повреждение ветроэнергетической установки.
Известные лидарные измерительные системы для определения скоростей ветра основываются на обнаружении и аналитической оценке вызываемого рассеянием лазерного света на движимых ветром частицах Доплеровского сдвига частот рассеянного света по сравнению с испускаемым светом (сравн.: C. Weitkamp, LIDAR–range–resolved optical remote sensing of the atmosphere, Springer 2005).
Обычно Доплеровский сдвиг частот определяется интерферометрически путем наложения на принятый измерительным устройством рассеянный свет света, который вводится лазерным источником света по второму оптическому пути внутри измерительного устройства. Для этой цели у известных лидарных измерительных устройств применяются высоко когерентные лазерные источники света, которые эмитируют свет, имеющий длины когерентности в несколько 100 м, при этом ширина полосы этой частоты лежит в мегагерцовом поддиапазоне.
Чтобы гарантировать всегда необходимое или, соответственно, желаемое пространственное разрешение, в принципе, известны две различных методики. Первый технический вариант предусматривает применение непрерывно излучающих лазерных источников, которые при помощи надлежащей оптической системы, например, линзы или телескопа, фокусируются на данной желательной целевой области. Соответствующее техническое решение описывается в WO 2005/1142531. Поскольку желаемая область фокусирования должна изменяться, это достигается при помощи механических элементов, которые, однако, как правило, сравнительно трудоемки в исполнении и дороги. Помимо этого, такие переставные элементы, прежде всего при долговременной эксплуатации, скрывают в себе риск дополнительных помех.
Второй технический вариант получения и изменения желаемого пространственного разрешения основывается на использовании импульсных лазерных источников. В этом случае определение места осуществляется путем измерения времени прохождения лазерных импульсов. Таким образом с помощью импульса, ширина которого определяет пространственное разрешение, которое для импульсов, имеющих ширину 200 нс, составляет, например, 30 м, с помощью измерительной системы могут поочередно замеряться несколько областей измерения. При этом отдельные поочередно замеряемые области измерения могут представлять собой каждая отдельные участки всего исследуемого измерительного объема.
Однако из–за осуществляющегося всегда только в течение короткого времени освещения одной отдельной области измерения импульсом получаются плохие отношения сигнал–шум. Далее, частотное разрешение и вместе с тем также разрешение скорости ветра из–за коротких ширин импульсов ограничено.
Исходя из вышеописанной измерительной системы, из WO 2014/072514 известно другое техническое решение для регистрации скорости ветра в удаленной области пространства, которое достигает изменения пространственного разрешения с помощью альтернативных технических мер. Существенным для этого решения является, что вместо обычно применяемых лазерных источников света применяется узкополосный источник света, который модулируется с определенным фазовым рисунком. Во–первых, благодаря применению непрерывно излучающего лазерного источника, нужна относительно низкая по сравнению с импульсным лидаром мощность передачи. Кроме того, пространственное разрешение не должно, как у импульсного лидара, выравниваться относительно разрешения скорости, а оба параметра могут независимо друг от друга выбираться в широких пределах. По сравнению с фокусируемым непрерывно излучающим лидаром (CW–LIDAR, англ. Continuous Wave LIDAR), это решение дает также то преимущество, что пространственное разрешение с увеличивающейся дальностью не становится грубее, а напротив, независимо от дальности.
Существенной конструктивной частью описанного лидарного измерительного устройства является модулятор, который основывается, например, на электрооптическом эффекте в надлежащем материале и гарантирует желаемую фазовую модуляцию частоты эмитируемого лазерным диодом света. Этот модулятор представляет собой сравнительно дорогую по отношению к измерительному устройству конструктивную часть, которая также предполагает надлежащее управление, а также электроснабжение.
Проблематичным у известных до сих пор лидарных систем является, что пространственное разрешение может гарантироваться или только с помощью сравнительно больших издержек и иногда чувствительных к неисправностям компонентов, или же нужны сравнительно дорогие оптоэлектронные конструктивные элементы. Это значительно затрудняет создание надежных и одновременно экономически интересных лидарных измерительных устройств, в частности для использования энергии ветра. Также с помощью известных лидарных измерительных устройств часто невозможно удовлетворительным образом отличать вызванный различными движениями частичек в области измерения положительный Доплеровский сдвиг от отрицательного. Часто для этого дополнительно к лидарному измерительному устройству должны применяться другие измерительные приборы.
С учетом известных из уровня техники технических решений для регистрации скорости, а также направления движения частичек, находящихся в удаленном измерительном объеме, при помощи лидарной измерительной системы, и поясненных выше проблем в основе изобретения лежит задача, усовершенствовать лидарную измерительную систему таким образом, чтобы при помощи сравнительно простой конструкции было возможно высокоточное измерение скорости частичек, движущихся в удаленной области измерения. При этом техническое решение, которое должно быть предложено, должно, прежде всего, обеспечивать возможность сравнительно простой настройки, а также перестановки пространственного разрешения. Далее, должно обеспечиваться, чтобы также направление движения частичек в области измерения надежно определялось простыми средствами, в частности без обязательной необходимости дополнительных измерительных устройств или, соответственно, сложных компонентов.
Вышеназванная задача решается с помощью устройства по п.1 формулы изобретения, а также способа по п.13 формулы изобретения. Особенно подходящие применения изобретения указаны в пп.11 и 12 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения и поясняются подробнее в последующем описании с частичной ссылкой на примеры осуществления.
Изобретение базируется на лидарном измерительном устройстве для определения скорости частичек в измерительном объеме с помощью узкополосного непрерывно излучающего лазерного источника света, испускающего свет, который модулируется по своей оптической частоте и потом вводится в измерительную ветвь и референтную ветвь. Введенный в измерительную ветвь свет по меньшей мере частично с помощью передающего устройства излучается в направлении измерительного объема таким образом, что излучаемый свет по меньшей мере частично рассеивается и/или отражается частичками в измерительном объеме, так что по меньшей мере часть рассеянного и/или отраженного света принимается приемным устройством. Далее на принятый свет когерентно накладывается свет, выходящий из референтной ветви, и результирующее при этом световое излучение направляется на детектор для создания характерного для этого результирующего светового излучения сигнала детектора. Наконец, в блоке аналитической оценки с учетом сигнала детектора определяется скорость частичек в отдельных областях измерения измерительного объема. Изобретение отличается тем, что с помощью устройства управления частота света, эмитируемого лазерным источником света, предопределенным образом варьируется, и блок аналитической оценки для расчета скорости частичек в отдельных областях измерения измерительного объема производит спектральный анализ сигнала детектора с учетом заданного изменения частоты или, соответственно, частотной модуляции. Применительно к описанию изобретения выражения «частотная модуляция» или, соответственно, «изменение частоты» должны пониматься как равнозначные.
При аналитической оценке принятого излучения всегда определяется и аналитически оценивается Доплеровский сдвиг частот между входящим в данную область измерения излучением и принятым, рассеянным или, соответственно, отраженным излучением. Существенным для изобретения является, что, в противоположность известным техническим решениям, частота света, эмитируемого лазерным источником света, изменяется или, соответственно, модулируется. Вследствие модуляции частоты с помощью известной функции можно выбирать пространственное разрешение и целенаправленно устанавливать дальность между измерительным устройством и данной замеряемой областью измерения, имеющей содержащиеся в ней частички.
Это достигается за счет того, что вследствие изменения частоты эмитируемого света достигается спектральное расширение и деформация указанного по меньшей мере практически монохромного света, при этом ширина полосы определяет длину когерентности. Поэтому можно с помощью одного и того же лазерного источника света реализовывать разные длины когерентности и вместе с тем пространственные разрешения. В качестве лазерного источника света применяется узкополосный лазерный источник света, который предпочтительно (испускает) свет, имеющий ширину полосы, которая меньше 1 МГц, предпочтительно меньше 100 КГц, особенно предпочтительно меньше 10 КГц. Измерительное устройство содержит предпочтительно оптический усилитель, который может определяться позади лазерного источника перед разделением на измерительную и референтную ветвь или в измерительной ветви.
Предпочтительным образом электроснабжение лазерного источника света модулируется непосредственно, что в итоге приводит к варьированию частоты эмитируемого светового излучения и вместе с тем спектра плотности мощности. Благодаря применяемому техническому решению, то есть частотной модуляции эмитируемого света, без применения сравнительно дорогих конструктивных элементов может реализовываться высокоточное измерение скорости частичек, движущихся в удаленно расположенном измеряемом объеме.
По одному из специальных вариантов осуществления изобретения лазерный источник света выполнен в виде лазерного диода, который эмитирует по меньшей мере приблизительно монохромный свет. Предпочтительным образом при этом инжекционный ток лазерного диода варьируется при помощи выполненного надлежащим образом устройства управления или, соответственно, при помощи создаваемого устройством управления управляющего сигнала. Это варьирование питающего тока приводит, с одной стороны, к обычно несущественному изменению выходной мощности, а с другой стороны, к желаемому варьированию оптической частоты или, соответственно, длины волны эмитируемого света. Таким образом, например, у РОС–лазера (лазер с распределенной обратной связью; англ. distributed feedback laser, DFB–laser), который эмитирует свет в диапазоне длины волны от 1530 до 1570 нм, предпочтительно 1550 нм, можно получать изменение оптической частоты на каждое изменение инжекционного тока в пределах от 0,5 до 1 ГГц/мА. Однако такие лазеры имеют обычно ширину линии 1…3 МГц, которая по меньшей мере не особенно хорошо подходит для описанного применения. Если нужны меньшие ширины линии, например, 50–100 КГц, могут предпочтительным образом применяться так называемые лазеры с внешним резонатором (англ. extended cavity lasers (ECLs)), располагающие коэффициентом тюнинга, который больше 01 ГГц/мА.
Вместо имплементации предусмотренной частотной модуляции путем модуляции инжекционного тока, могут также применяться специальные лазерные диоды, имеющие области согласования частоты и отдельные тюнинговые электроды.
В одном из особых усовершенствований дополнительно к частотной модуляции света, эмитируемого лазерным источником света, блок аналитической оценки выполнен таким образом, что при аналитической оценке генерированного сигнала детектора учитывается, с одной стороны, известная частотная функция, а с другой стороны, дополнительное значение временного сдвига. Это значение временного сдвига выбирается таким образом, чтобы результат функции соответствовал сигналу детектора, который получался бы при выборе референтной ветви, имеющей по сравнению с действительной референтной ветвью измененное на значение временного сдвига время прохождения, и при этом также соответственно измененную оптическую длину пути. Этот вариант осуществления основывается на том обнаруженном факте, что сигнал детектора содержит не только нужную для аналитической оценки информацию о частицах в области измерения, соответствующей действительной оптической длине пути референтной ветви и длине когерентности, которая представляет собой только часть всей освещаемой области, но и всегда уже информацию о частицах в других освещаемых областях, которые при выполняемом в данный момент измерении не соответствуют выбранной области измерения или, соответственно, выбранному пространственному разрешению.
Предпочтительным образом применяется непрерывно излучающий лазерный источник света, эмитируемый свет которого вследствие частотной модуляции имеет длину когерентности в пределах от 0,1 до 100 м. Особенно подходящей является длина когерентности в пределах от 1 до 100 м, и совсем особо предпочтительно в пределах от 1 до 50 м. При выборе лазерного источника света или, соответственно, установлении длины когерентности следует учитывать, что когерентная интерференция на детекторе возможна только для рассеянно света частиц или, соответственно, только отраженного света объектов, для которого оптическая длина пути измерительной ветви в пределах длины когерентности совпадает с оптической длиной пути референтной ветви. По этой причине при сильно ограниченной длине когерентности получается высокое и настраиваемое путем выбора длины когерентности пространственное разрешение. Попадающий в детекторную систему рассеянный свет, который исходит от частиц, находящихся вне области когерентности, приводит, в отличие от этого, только к широкополосному фону сигнала детектора, что, хотя и может приводить к маленькому сокращению отношения сигнал–шум, но не ухудшает пространственное разрешение. Если область когерентности меньше максимальной протяженности измеряемого объема, только отдельный участок, а именно, данная область измерения, замеряется, и путем сдвига области когерентности, например, при помощи опционально имеющегося устройства для изменения оптической длины пути референтной ветви, которое предпочтительно осуществляется расчетными средствами, может достигаться определенное ее оптической длиной, длиной когерентности, пространственное разрешение. Это пространственное разрешение предпочтительным образом независимо от дальности данной исследуемой области измерения.
По другому предпочтительному варианту осуществления изобретения устройство управления выполнено таким образом, что варьирование частоты света, эмитируемого лазерным источником света, осуществляется на основе создаваемого устройством управления управляющего сигнала, который соответствует обусловленному заданной частотной функцией псевдосигналу шума. Таким образом можно желаемым образом модулировать частоту эмитируемого света, и при этом, в частности, желаемым образом адаптировать оптический спектр плотности мощности. Так как используемая в каждом случае в устройстве управления частотная функция известна, данный лазерный источник света может применяться для реализации разных длин когерентности и вместе с тем разных пространственных разрешений
В одном из особых усовершенствований изобретения частота света, эмитируемого непрерывно излучающим лазерным источником света, варьируется так, что он имеет линейную по времени составляющую, последняя создана, например, приблизительно линейной по времени составляющей в инжекционном токе лазерного диода. Это может комбинироваться с вышеописанным характером псевдошума.
Эта мера позволяет предпочтительным образом распознавать знаки перед числом при вызванном эффектом Доплера сдвиге частот между частотой испускаемого и принимаемого света.
Выведенный из принятого рассеянного или, соответственно, отраженного света сигнал содержит информацию не о частоте света, а о разности с частотой референтного света, который направлялся лазерным источником света по референтной ветви. Из этой разности с учетом эффекта Доплера выводится скорость движущихся в измеряемом объеме частичек. В простейшем случае референтный свет ответвляется от передатчика и тогда имеет ту же частоту, что и испускаемый свет.
Однако в этой связи следует учитывать, что разность частот, в зависимости от направления движения частичек в измеряемом объеме к лидару или от лидара, может иметь положительный или отрицательный знак перед числом. Благодаря предусмотренной в соответствии с изобретением модуляции частоты света, эмитируемого лазерным источником света, предпочтительным образом можно накладывать на частоту света другой линейно зависимый от времени сигнал, так что также частота передачи света, испускаемого в направлении измеряемого объема, линейно изменяется. При этом предпочтительным образом предусмотрено, что разность между частотой передачи и частотой принятого приемным устройством рассеянного и/или отраженного света выбирается такой величины, что, несмотря на вызванный движением частичек Доплеровский сдвиг частоты принятого света относительно частоты передачи, знак перед числом разности не изменяется. Как только разность между частотой передачи и частотой приема надлежащим образом выбирается особенно большой, Доплеровский сдвиг больше не может изменять знак перед числом разности, и имеется однозначность в отношении направления движения частичек в измеряемом объеме.
При описанном исполнении линейной частотной модуляции частотное разрешение может нежелательным образом изменяться. Это может предотвращаться путем соответствующего ограничения крутизны линейной частотной модуляции. Тогда, возможно, изменяющийся знак перед числом разности между частотой передачи и частотой приема может распознаваться путем треугольной частотной модуляции и отдельного анализа восходящей и нисходящей ветви. В одной ветви появляется сумма, а в другой ветви разность Доплеровского сдвига и обусловленного временем прохождения сдвига частот.
В другом особом варианте осуществления изобретения частота света, эмитируемого непрерывно излучающим лазерным источником света, линейно изменяется или, соответственно, модулируется вверх и вниз. Получающийся сдвиг частот принятого сигнала по сравнению с переданным сигналом зависит, в свою очередь, от дальности области измерения или, соответственно, области объема, в которой происходит рассеяние на частичках, и от Доплеровского сдвига. Частотное разрешение, как в вышеописанном способе с наложенной стохастической и линейной частотной модуляцией, определяется крутизной модуляции и пространственным разрешением. Пространственное разрешение здесь известным образом создается фокусированием, в частности с помощью надлежащим образом переставляемых оптических элементов. Вследствие треугольной модуляции передаваемого сигнала предпочтительным образом при аналитической оценке разностных частот в восходящей и нисходящей ветви, как описано выше, может также определяться знак перед числом сдвига частот. Треугольная модуляция представляет собой при этом по сравнению с известными способами, которые предусматривают нахождение направление ветра с помощью дополнительного измерительного прибора, в частности с помощью флюгера, или определение составляющей дальности на основе особого измерения, особенно оптимальный по стоимости метод для получения однозначности при определении направления движения частичек в измеряемом объеме. Другим преимуществом треугольной модуляции является, что путем аналитической оценки разностных частот в восходящей и нисходящей ветви может выводиться не только Доплеровский сдвиг, но и точная эффективная дальность фокуса. В зависимости от того, создает Доплеровский сдвиг смену знака перед числом разностных частот или нет, Доплеровский сдвиг равен половине разности (суммы) разностных частот, а дальность фокуса равна четверти скорости света, умноженной на сумму (разность) разностных частот. Какой случай имеет место, решить легко, так как приблизительная удаленность фокуса известна.
Одно из специальных усовершенствований изобретения отличается тем, что в измерительной ветви применяется оптический выключатель, например, акустооптический модулятор. При этом длины импульса должны выбираться так, чтобы они были длиннее, чем это соответствует желаемому пространственному разрешению, так чтобы пространственное разрешение также было определено частотной модуляцией лазерного источника. При этом режиме работы сигнал детектора больше не имеется в распоряжении постоянно. Несмотря на это, в определенных случаях применения получаются преимущества, например, тогда, когда не могут достаточно подавляться внутренние отражения из измерительной конструкции, когда сильный некогерентный фон вследствие сильных рассеяний вне измеряемого объема сильно ухудшает отношение сигнал–шум, или когда специальные свойства оптического усилителя в импульсном режиме позволяют ожидать значительного преимущества. Преимущество выполненной в соответствии с изобретением измерительной системы, имеющей импульсный лазер, заключается в том, что могут получаться более длинные зоны досягаемости по сравнению с не импульсным режимом, без ограничения нормальных импульсных систем в отношении пространственного разрешения и разрешения скорости.
Одно из специальных усовершенствований изобретения отличается тем, что свет, эмитируемый лазерным источником света, перед разветвлением измерительной и референтной ветви подается на оптический усилитель, в частности эрбиевый волоконный усилитель. Далее, для выполненного в соответствии с изобретением измерительного устройства предпочтительно применяются сохраняющие поляризацию волокна. Если такие волокна не применяются, вообще возможно, в частности в референтной ветви, предусмотреть по меньшей мере один поляризующий свет элемент, предпочтительно регулятор поляризации.
Выполненное в соответствии с изобретением лидарное измерительное устройство, которое описывается выше, предназначено, в частности, для регистрации скорости ветра и/или направления ветра, которое действует с наветренной стороны ветроэнергетической установки. В этой связи также возможно, чтобы соответствующее лидарное измерительное устройство монтировалось на коке ветроэнергетической установки, и так уже на достаточной дальности могла обнаруживаться скорость и направление ветра, обтекающего ветроэнергетическую установку, чтобы, с одной стороны, обеспечивать возможность эффективной эксплуатации ветроэнергетической установки, а с другой стороны, предотвращать повреждения ветроэнергетической установки, например, вследствие внезапных порывов ветра, прежде всего, путем перестановки угла наклона лопастей ветроколеса для уменьшения нагрузки или путем запуска аварийного выключения.
Далее, изобретение касается также способа определения скорости частичек в измеряемом объеме, при котором узкополосным непрерывно излучающим лазерным источником света испускается свет и вводится в измерительную ветвь и референтную ветвь. Введенный в измерительную ветвь свет по меньшей мере частично с помощью передающего устройства излучается в направлении измерительного объема таким образом, что излучаемый свет по меньшей мере частично рассеивается и/или отражается частичками в измерительном объеме. По меньшей мере часть рассеянного и/или отраженного света принимается приемным устройством лидарного измерительного устройства, на него когерентно накладывается свет, выходящий из референтной ветви, и результирующее при этом световое излучение направляется на детектор для создания характерного для этого результирующего светового излучения сигнала детектора. Наконец, в блоке аналитической оценки с учетом сигнала детектора определяется скорость частичек в измеряемом объеме. Выполняемый в соответствии с изобретением способ отличается тем, что с помощью устройства управления частота света, эмитируемого лазерным источником света, предопределенным образом варьируется, и в блоке аналитической оценки для расчета скорости частичек в отдельных областях измерения измерительного объема производится спектральный анализ сигнала детектора с учетом заданной частотной модуляции. Предпочтительным образом в качестве лазерного источника света применяется лазерный диод, инжекционный ток которого варьируется на основе надлежащего управляющего сигнала.
На основе соответствующего варьирования частоты эмитируемого лазерным диодом света можно изменять пространственное разрешение лидарного измерительного устройства без необходимости применения другого лазерного источника света или потребности для этого в механической перестановке.
В одном из специальных вариантов осуществления предлагаемого изобретением способа также предусмотрено, что варьирование частоты света, эмитируемого лазерным источником света, осуществляется на основе создаваемого устройством управления управляющего сигнала, который соответствует целенаправленно вызванному заданной частотной функцией сигналу шума.
Далее изобретение без ограничения общей идее изобретения поясняется подробнее на примерах осуществления со ссылкой на фигуры. При этом показано:
фиг.1: принципиальная конструкция выполненного в соответствии с изобретением лидарного измерительного устройства;
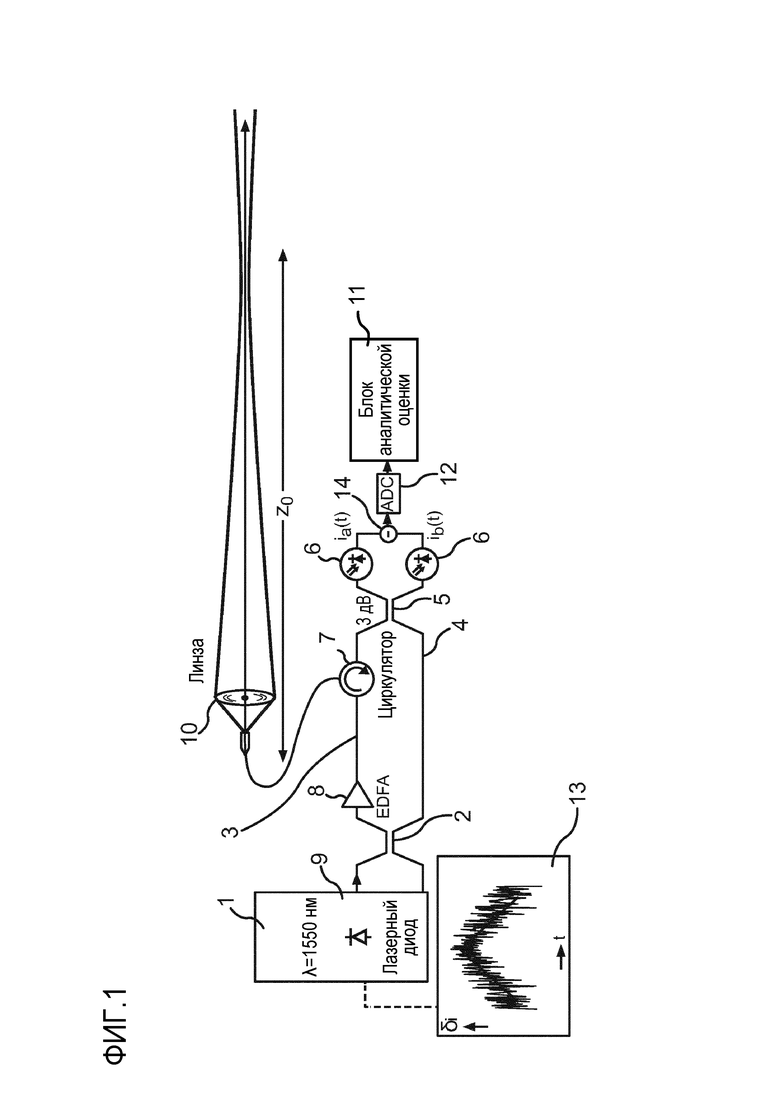
фиг.2: характер изменения спектра плотности электрической мощности в зависимости от частоты;
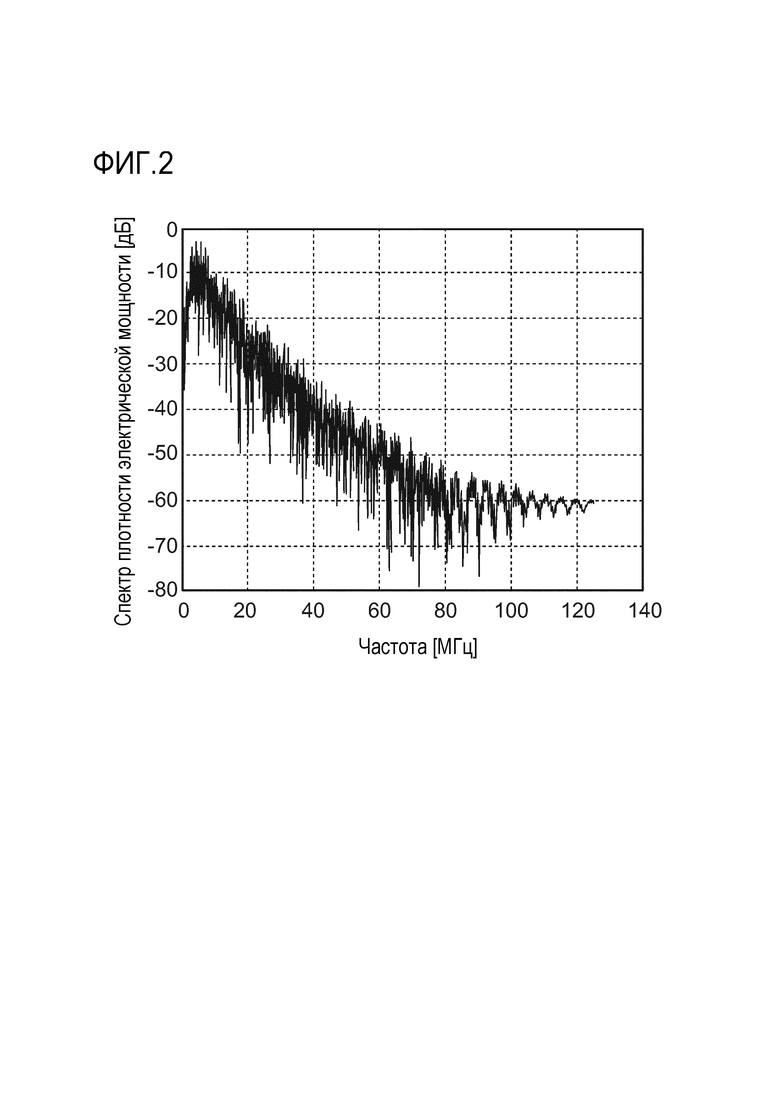
фиг.3: характер изменения модулированной частоты на некотором отрезке времени;
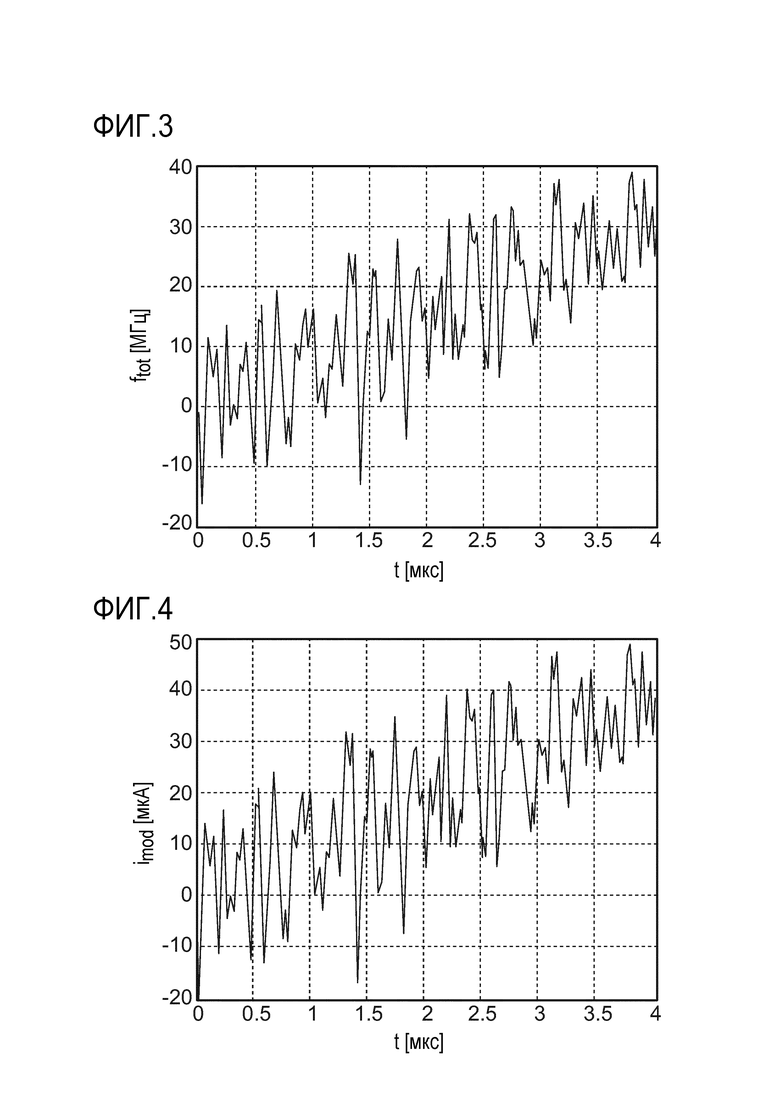
фиг.4: характер изменения модулированного инжекционного тока на некотором отрезке времени.
На фиг.1 схематично изображено выполненное в соответствии с изобретением лидарное измерительное устройство. Лидарное измерительное устройство располагает непрерывно излучающим лазерным источником 1 света, имеющим выходную мощность 10 мВт, который эмитирует свет, имеющий длину волны 1550 нм. Свет, эмитируемый лазерным источником 1 света, при помощи оптоволоконного соединителя, который выполняет функцию разделителя 2 луча, вводится, с одной стороны, в по меньшей мере частично определенную оптоволокном измерительную ветвь 3, а с другой стороны, в полностью определенную оптоволокном референтную ветвь 4.
Применяемые оптические волокна представляют собой предпочтительно мономодовые волокна, имеющие низкое затухание и радиус поля предпочтительно 5 мкм. Предпочтительно применяются волокна, сохраняющие поляризацию, так называемые PM–(polarization maintaining) ,волокна. В конце измерительной ветви 3 и референтной ветви 4 расположен другой оптоволоконный соединитель 5 для объединения света из измерительной ветви 3 и из референтной ветви 4. На выходящий из референтной ветви 4 свет когерентно накладывается принятый свет, и результирующее излучение света направляется на детектор 6. По этому примеру осуществления детектор располагает двумя отдельными фотодетекторами, которые предпочтительно выполнены в виде InGaAs–детекторов (детекторы на основе арсенида галлия–индия). При помощи детектора 6 создаются характерные для обнаруженного излучения сигналы, причем эти два сигнала вычитаются один из другого в вычитающем элементе 14 для устранения помех (сбалансированное обнаружение). Наконец, разностный сигнал через аналогово–цифровой преобразователь 12 подается в блок 11 аналитической оценки, в котором разностный сигнал аналитически оценивается для обнаружения присутствия и/или движения частиц.
В случае если не применяются PM–волокна, в референтной ветви 4 предусмотрен настраиваемый оптоволоконный регулятор поляризации и обходной участок, например, в виде навитого участка волокон.
Измерительная ветвь имеет последовательно в качестве усилителя 8 эрбиевый волоконный усилитель, имеющий предпочтительную выходную мощность 1 кВт, и оптический циркулятор 7. От циркулятора 7 введенный в измерительную ветвь 3 свет по волоконному участку подводится к приемно–передающей линзе 10, имеющей фокусное расстояние, например, 250 мм, и оттуда фокусируется в направлении замеряемого измерительного объема или, соответственно, данной области измерения.
Рассеянное или, соответственно, отраженное от частичек в измеряемом объеме излучение по меньшей мере частично снова попадает в приемно–передающую линзу 10 лидарного измерительного устройства. В изображенном здесь примере осуществления приемно–передающее устройство скомбинировано в приемно–передающей линзе 10. Принимаемый при этом рассеянный и/или отраженный свет затем через циркулятор 7 вводится в оставшийся волоконный участок измерительной ветви 3.
Непрерывно излучающий лазерный источник 1 света располагает лазерным диодом 9 и соединен с устройством 13 управления, которое надлежащим образом варьирует инжекционный ток лазерного диода 9, так что изменяется также частота эмитируемого лазерным диодом света. В устройстве 13 управления всегда в зависимости от желаемого пространственного разрешения заложена частотная функция, так что свет, эмитируемый лазерным источником 1 света, по сравнению с обычно эмитируемого лазерным диодом 9 светом изменен путем модуляции как функция частотной функции в оптическом спектре плотности мощности, в частности расширен и деформирован. При этом с помощью устройства 13 управления на основе надлежащей, определяющей псевдосигнал шума частотной функции изменятся частота эмитируемого света. Путем учета разных значений сдвига времени при аналитической оценке с помощью блока аналитической оценки чисто расчетным путем, без изменения описанной конструкции, может отдельно производиться обнаружение частичек и их движения с пространственным разрешением для разных, удаленных на различные расстояния от линзы 10 областей измерения.
Существенным для изобретения является, что частота света, эмитируемого лазерным источником 1 света, целенаправленно варьируется, так что, в противоположность известным из уровня техники техническим решениям, нет необходимости в фазовом модуляторе для лазерного источника света, а также акустооптическом модуляторе (АОМ). Чтобы достичь надлежащей частотной модуляции, так чтобы можно было обойтись без применяемого по уровню техники фазового модулятора и, несмотря на это, получалась модуляция частоты эмитируемого света, которая достигает того же действия, что и находящая применение у известных измерительных систем фазовая модуляция Θ(t), мгновенная частота лазерного диода должна изменяться в соответствии с
где Θ(t) соответствует значению данной фазы. Для этого необходима модуляция инжекционного тока по
 .
.
Однако это приводит к нежелательной модуляции выходной мощности лазера
 ,
,
где= dP0/di обозначает так называемый slope efficiency (англ. дифференциальный КПД), для которого в качестве ориентировочного значения может быть принято 0,2 мВт/мА.
dP0/di обозначает так называемый slope efficiency (англ. дифференциальный КПД), для которого в качестве ориентировочного значения может быть принято 0,2 мВт/мА.
Некоторая часть ρ выходной мощности P0+δP0,mod лазера вводится в ветвь ЛО (пространственного осциллятора), при этом неизбежно обусловленное модуляцией варьирование мощности передачи:
 .
.
При идеальном приеме варьирование мощности ЛО не наблюдается. При реальном сбалансированном приеме на выходе получается AC–сигнал, равный
имеющий относящуюся к детектору чувствительность  срабатывания фотодиода. Для сравнения, для (скорректированного) полезного сигнала мощности Psignal получается ток детектора, имеющий эффективное значение
срабатывания фотодиода. Для сравнения, для (скорректированного) полезного сигнала мощности Psignal получается ток детектора, имеющий эффективное значение
 .
.
Для грубого сравнения квадратичное эффективное значение  оценивается по
оценивается по
 .
.
Отсюда следует
 .
.
При
ε=0,01, β=0,2 мВт/мА, γtun= 100 МГц/мА; P0=20 мВт; fmax= 10 МГц; PLO= 100 мкВт
отсюда получается
 .
.
Это сравнение поясняет, что при таком эффективном значении обусловленным модуляцией шумовым фоном можно пренебречь. Дополнительно следует учитывать, что сигнал является узкополосным, например, 100 кГц, в то время как обусловленный модуляцией шум является широкополосным и концентрируется на низкочастотном диапазоне частот, как это изображено на фиг.2.
При известной из уровня техники фазовой модуляции с помощью электрооптического фазового модулятора для корректировки используется предопределенная фаза  . Фазовый модулятор активируется пропорциональным фазе сигналом. При этом может возникать ошибка масштабирования, так что влияющая на оптический сигнал фаза будет
. Фазовый модулятор активируется пропорциональным фазе сигналом. При этом может возникать ошибка масштабирования, так что влияющая на оптический сигнал фаза будет  . В этой связи известно, что значения
. В этой связи известно, что значения  некритичны.
некритичны.
При предусмотренной в соответствии с изобретением непосредственной модуляции лазерного источника света с помощью надлежащей частотной функции на инжекционный ток влияет сигнал модуляции в соответствии с
 .
.
Если и в этом случае возникнет ошибка масштабирования, для которой имеет место следующее:
 ,
,
то последствия те же самые. При этом непосредственно получается, что реализуемо предлагаемое изобретением лидарное измерительное устройство, у которого частотная модуляция производится непосредственно на лазерном источнике света, так что можно обойтись без применявшегося до сих пор фазового модулятора.
Как уже показали приведенные выше рассуждения, из уровня техники известно, что эмитируемая лазерным источником света оптическая волна с помощью фазового модулятора подвергается предопределенной фазовой модуляции  , и оптическая частота сдвигается в ветви интерферометра с помощью аукустооптического модулятора (АОМ) на
, и оптическая частота сдвигается в ветви интерферометра с помощью аукустооптического модулятора (АОМ) на  . Тогда покоящаяся точечная цель на расстоянии z дает сигнал детектора
. Тогда покоящаяся точечная цель на расстоянии z дает сигнал детектора
 .
.
Если цель движется со скоростью  в направлении +z, то дополнительно возникает Доплеровский сдвиг
в направлении +z, то дополнительно возникает Доплеровский сдвиг  :
:
 .
.
Этот сигнал для корректировки может перемножаться с известной функцией
 .
.
Тогда скорректированный для положения z сигнал чисто синусоидальный:
 .
.
В спектре он дает узкую линию при  .
.
Однако когда применяется эта функция  корректировки, мишень находится в месте
корректировки, мишень находится в месте  или
или  , так что спектр плотности электрической мощности широкий. Ширина зависит от . Также величина
, так что спектр плотности электрической мощности широкий. Ширина зависит от . Также величина  зависит от фазового рисунка и называется пространственным разрешением, обусловленным «low coherence (англ. низкая когерентность)», которая обусловлена модуляцией. Соответствующие фазовые рисунки, например, для=
зависит от фазового рисунка и называется пространственным разрешением, обусловленным «low coherence (англ. низкая когерентность)», которая обусловлена модуляцией. Соответствующие фазовые рисунки, например, для= 5 м, 10 м, 15 м, могут определяться в численном виде специальным способом итерации. То есть цели в области
5 м, 10 м, 15 м, могут определяться в численном виде специальным способом итерации. То есть цели в области

дают приблизительно узкий спектр при частоте  , имеющий ширину
, имеющий ширину  , которая по существу задана временем T измерения. Вне этой области получается широкий спектр.
, которая по существу задана временем T измерения. Вне этой области получается широкий спектр.
По другому варианту осуществления изобретения частота света, эмитируемого лазерным источником света, в частности лазерным диодом, изменяется двумя способами. В этой связи происходит стохастическая модуляция частоты и, кроме того, частота света, эмитируемого лазерным источником света, изменяется линейно по времени. При этом имеет место:

так что получается сигнал детектора в соответствии с
 .
.
В отличие от уравн. (2), здесь вместо постоянной частоты  выступает зависимая от места, обусловленная линейной частотной модуляцией частота
выступает зависимая от места, обусловленная линейной частотной модуляцией частота  .
.
Если корректировка осуществляется при  в соответствии с уравн. (3), получается результат соответственно уравн. (4):
в соответствии с уравн. (3), получается результат соответственно уравн. (4):
 .
.
Так как скорость  линейной частотной модуляции и место z заданы и поэтому известны, отсюда можно определять Доплеровскую частоту
линейной частотной модуляции и место z заданы и поэтому известны, отсюда можно определять Доплеровскую частоту  .
.
Если теперь, в свою очередь, изменить место мишени, но сохранить функцию корректировки, то получатся измененные на краях  пространственного разрешения, обусловленные линейной частотной модуляцией частоты
пространственного разрешения, обусловленные линейной частотной модуляцией частоты
 .
.
При этом в интервале  частота в спектре смазана на
частота в спектре смазана на  . Чтобы существенно не ухудшать Доплеровское разрешение по сравнению с известным из уровня техники решением, которое использует акустооптический модулятор (АОМ), должно иметь место следующее:
. Чтобы существенно не ухудшать Доплеровское разрешение по сравнению с известным из уровня техники решением, которое использует акустооптический модулятор (АОМ), должно иметь место следующее:
 (10).
(10).
Отсюда следует
 (11).
(11).
Если выбрать наибольшую возможную  и провести измерения при
и провести измерения при  , что соответствует треугольной частотной модуляции, то после корректировки получатся спектральные линии при частотах
, что соответствует треугольной частотной модуляции, то после корректировки получатся спектральные линии при частотах
 .
.
Таким образом, для Доплеровской частоты имеет место:
 .
.
Если одна из частот  и поэтому неопределима, то снова справедливо, что
и поэтому неопределима, то снова справедливо, что  может также определяться из соответствующих других:
может также определяться из соответствующих других:
 .
.
Далее указаны некоторые конкретные примеры расчета:
Для частотной модуляции питающего тока лазерного источника света, в частности инжекционного тока лазерного диода, имеют значение следующие размышления. Таким образом могут реализовываться надлежащая частотная модуляция и линейная частотная модуляция.
При заданном фазовом рисунке  для реализации пространственного разрешения
для реализации пространственного разрешения  и желаемой линейной частотной модуляции (интенсивность
и желаемой линейной частотной модуляции (интенсивность  линейной частотной модуляции) общая фазовая модуляция оптической волны должна составлять
линейной частотной модуляции) общая фазовая модуляция оптической волны должна составлять
 ,
,
а соответствующая частотная модуляция и модуляция тока
На каждой из фиг.3 и 4 показаны в качестве примера измерения, которые подтверждают вышестоящие расчеты. При этом на фиг.3 показан характер изменения частоты ftot в МГц, а на фиг.4 модулированный инжекционный ток δimod в мкА, в течение периода времени 4 мкс (  ;
;  ) соответственно.
) соответственно.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Лазерный источник света
2 Делитель луча
3 Измерительная ветвь
4 Референтная ветвь
5 Оптоволоконный соединитель
6 Детектор
7 Циркулятор
8 Усилитель
9 Лазерный диод
10 Линза
11 Блок аналитической оценки
12 Аналогово–цифровой преобразователь
13 Блок управления
14 Вычитающий элемент
| название | год | авторы | номер документа |
|---|---|---|---|
| КОГЕРЕНТНАЯ ЛИДАРНАЯ СИСТЕМА НА ОСНОВЕ ПОЛУПРОВОДНИКОВОГО ЛАЗЕРА И УСИЛИТЕЛЯ | 2008 |
|
RU2484500C2 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| ЛИДАРНАЯ СИСТЕМА ДЛЯ АНЕМОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ | 2020 |
|
RU2799037C1 |
| СПОСОБ НЕИНВАЗИВНОГО ОПТИЧЕСКОГО ИЗМЕРЕНИЯ СВОЙСТВ ПРОТЕКАЮЩЕЙ КРОВИ | 2015 |
|
RU2703894C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА И НЕКОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛИДАР | 2013 |
|
RU2545498C1 |
| СПОСОБ ОПЕРАТИВНОГО ПОИСКА И ОБНАРУЖЕНИЯ ПОДВОДНОГО ИСТОЧНИКА ЗВУКА | 2018 |
|
RU2794213C2 |
| СПОСОБ ЛАЗЕРНОГО ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ | 1995 |
|
RU2108585C1 |
| ДЕТЕКТОР И СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ | 2007 |
|
RU2458352C2 |
| Способ и устройство для автономного дистанционного определения концентрации атмосферных газовых составляющих | 2020 |
|
RU2736178C1 |
| РАДИОЛОКАТОР ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА | 2023 |
|
RU2811547C1 |
Изобретение относится к области измерительной техники и касается лидарного измерительного устройства для определения скорости частичек в измерительном объеме. Лидарное устройство содержит лазерный источник света, испускающий свет, который вводится в измерительную и референтную ветви. Введенный в измерительную ветвь свет излучается в направлении на измерительный объем. Приемное устройство принимает рассеянный и/или отраженный свет, на который когерентно накладывается свет, выходящий из референтной ветви, и результирующее излучение направляется на детектор. В блоке аналитической оценки с учетом сигнала детектора определяется скорость частичек в измерительном объеме. С помощью устройства управления частота эмитируемого света варьируется, и скорость частичек определяется на основе спектрального анализа сигнала детектора с учетом заданной частотной модуляции. Устройство управления выполнено с возможностью создавать управляющий сигнал, который соответствует псевдосигналу шума, вызванному заданной частотной функцией, и который положен в основу варьирования частоты света, эмитируемого лазерным источником света. Технический результат заключается в упрощении устройства и обеспечении возможности измерения как скорости, так и направления движения частичек в измерительных объемах, расположенных на различном расстоянии от устройства. 4 н. и 11 з.п. ф-лы, 4 ил.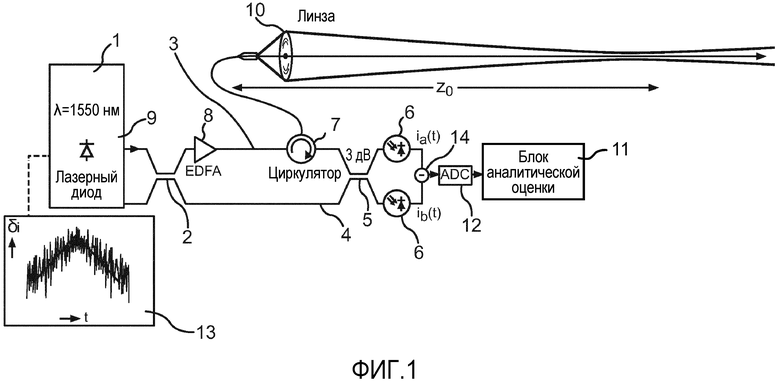
1. Лидарное измерительное устройство для определения скорости частичек в измерительном объеме с помощью узкополосного непрерывно излучающего лазерного источника (1) света, испускающего свет, который вводится в измерительную ветвь (3) и референтную ветвь (4), при этом введенный в измерительную ветвь (3) свет по меньшей мере частично с помощью передающего устройства излучается в направлении на измерительный объем таким образом, что излучаемый свет по меньшей мере частично рассеивается и/или отражается частичками в измерительном объеме, и приемным устройством принимается по меньшей мере часть рассеянного и/или отраженного света, на который когерентно накладывается свет, выходящий из референтной ветви (4), и результирующее при этом световое излучение направляется на детектор (6) для создания сигнала детектора, характерного для результирующего светового излучения, при этом в блоке (11) аналитической оценки с учетом сигнала детектора определяется скорость частичек в измерительном объеме,
причем с помощью устройства (13) управления частота света, эмитируемого лазерным источником (1) света, варьируется, и блок (11) аналитической оценки выполнен с возможностью определять скорость частичек по меньшей мере в одной области измерения измерительного объема на основе спектрального анализа сигнала детектора с учетом заданной частотной модуляции,
отличающееся тем, что устройство (13) управления выполнено с возможностью создавать управляющий сигнал, который соответствует псевдосигналу шума, вызванному заданной частотной функцией, и который положен в основу варьирования частоты света, эмитируемого лазерным источником (1) света.
2. Лидарное измерительное устройство по п.1,
отличающееся тем, что устройство (13) управления для варьирования частоты эмитируемого света изменяет силу питающего тока для лазерного источника (1) света.
3. Лидарное измерительное устройство по п.1 или 2,
отличающееся тем, что лазерный источник (1) света содержит лазерный диод (9), инжекционный ток которого изменяется для варьирования частоты эмитируемого света.
4. Лидарное измерительное устройство по одному из пп.1-3,
отличающееся тем, что частотная модуляция выбирается таким образом, чтобы лазерный источник (1) света эмитировал свет с длиной когерентности от 0,1 до 100 м.
5. Лидарное измерительное устройство по одному из пп.1-4,
отличающееся тем, что лазерный источник (1) света эмитирует свет с длиной когерентности от 1 до 50 м.
6. Лидарное измерительное устройство по одному из пп.1-5,
отличающееся тем, что блок (13) управления влияет на лазерный источник света с помощью дополнительного сигнала таким образом, чтобы к частоте эмитируемого света добавлялась дополнительная линейная по времени составляющая.
7. Лидарное измерительное устройство по п.6,
отличающееся тем, что
из принятого приемным устройством рассеянного или, соответственно, отраженного света выводится сигнал, который содержит информацию о разности между частотой передачи и частотой приема, причем разность между частотой передачи и частотой приема выбирается такой величины, чтобы знак перед числом разности не изменялся, несмотря на вызванный движением частичек Доплеровский сдвиг частоты принимаемого света относительно частоты передачи.
8. Лидарное измерительное устройство по одному из пп.1-7,
отличающееся тем, что устройство (13) управления изменяет силу тока таким образом, чтобы частота света, эмитируемого лазерным источником (1) света, линейно варьировалась восходящим и нисходящим образом.
9. Лидарное измерительное устройство по одному из пп.1-8,
отличающееся тем, что блок (13) управления выполнен таким образом, чтобы испускаемый свет передавался в импульсном режиме, при этом длины импульсов выбираются так, чтобы они были длиннее, чем это соответствует необходимому пространственному разрешению, так чтобы пространственное разрешение также определялось частотной модуляцией лазерного источника света.
10. Лидарное измерительное устройство по одному из пп.1-9,
отличающееся тем, что в измерительной ветви (3) расположен оптический выключатель, в частности акустооптический модулятор.
11. Лидарное измерительное устройство по одному из пп.1-9,
отличающееся тем, что в референтной ветви (4) расположен по меньшей мере один поляризующий свет элемент.
12. Применение лидарного измерительного устройства по одному из пп.1-11 для регистрации скорости ветра и/или направления ветра с наветренной стороны ветроэнергетической установки.
13. Применение лидарного измерительного устройства по одному из пп.1-11 для регистрации скорости ветра и/или направления ветра с наветренной стороны ветроэнергетической установки, при этом измерительное устройство закреплено на коке ветроэнергетической установки.
14. Способ определения скорости частичек в измерительном объеме, в котором посредством узкополосного непрерывно излучающего лазерного источника (1) света свет испускают и вводят в измерительную ветвь (3) и референтную ветвь (4), причем введенный в измерительную ветвь (3) свет по меньшей мере частично с помощью передающего устройства излучают в направлении на измерительный объем таким образом, что излучаемый свет по меньшей мере частично рассеивается и/или отражается частичками в измерительном объеме, и приемным устройством принимают по меньшей мере часть рассеянного и/или отраженного света, на который когерентно накладывают свет, выходящий из референтной ветви (4), и результирующее при этом световое излучение направляют на детектор (6) для создания сигнала детектора, характерного для результирующего светового излучения, и причем в блоке (11) аналитической оценки с учетом сигнала детектора определяют скорость частичек в измеряемом объеме, причем с помощью устройства (13) управления частоту света, эмитируемого лазерным источником (1) света, варьируют, и в блоке (11) аналитической оценки для расчета скорости частичек по меньшей мере в одной области измерения измерительного объема производят спектральный анализ сигнала детектора с учетом заданной частотной модуляции,
отличающийся тем, что варьирование частоты света, эмитируемого лазерным источником (1) света, осуществляют на основе создаваемого устройством (13) управления управляющего сигнала, который соответствует псевдосигналу шума, вызванному заданной частотной функцией.
15. Способ по п.14,
отличающийся тем, что варьирование частоты света, эмитируемого лазерным источником (1) света, осуществляют на основе создаваемого устройством (13) управления управляющего сигнала, который содержит линейную по времени составляющую.
| US 2016170023, 16.06.2016 | |||
| US 2012169053 A1, 05.07.2012 | |||
| Seiichi Kakuma "Frequency-modulated continuous-wave laser radar using dual vertical-cavity surface-emitting laser diodes for real-time measurements of distance and radial velocity", OPTICAL REVIEW, Т | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| US 2015301178 A1, 22.10.2015 | |||
| US 4666295 A, 19.05.1987 | |||
| US | |||

