Изобретение относится к нефтегазовой промышленности, а именно к способам подводного подсоединения трубопроводов, и может использоваться для минимизации риска заклинивания сменных изделий, продольно перемещаемых рамой сопряжения системы соединения оборудования (далее - ССО) в оконечных втулках трубопровода.
Подводные процедуры по подсоединению втулок трубопроводов являются длительными, дорогостоящими мероприятиями с высоким риском для жизни и техники, выполняемыми в рамках обустройства подводных месторождений, что обусловлено привлечением значительного ресурса персонала и морской техники в условиях открытого моря. Подводные операции по подсоединению втулок трубопроводов, в общем случае, включают в себя последовательность следующих операций, выполняемых с помощью набора специализированных инструментов:
- установка и монтаж на дне единиц оборудования системы подводной добычи (далее - СПД), в состав которых входят трубопроводы с вмонтированными оконечными втулками трубопроводов;
- позиционирование оконечных втулок трубопроводов;
- снятие консервационных заглушек и, если требуется, сменных уплотнительных элементов с оконечных втулок трубопроводов;
- подводное обслуживание уплотнительных зон оконечных втулок трубопроводов;
- контроль уплотнительных зон оконечных втулок трубопроводов;
- установка сменных уплотнительных элементов в оконечные втулки трубопроводов;
- стягивание оконечных втулок трубопроводов друг к другу;
- обжатие стянутых оконечных втулок трубопроводов замковыми устройствами для достижения герметичного соединения, работоспособного на срок эксплуатации трубопровода.
Во время выполнения указанных операций существует значительный риск заклинивания инструментов ввиду неточности изготовления, ударного воздействия подводных объектов, коррозии и биологического обрастания. В целях обеспечения экологической безопасности, а также из-за дороговизны инструментов и трубопроводов, все сменное оборудование и инструменты необходимо извлекать на поверхность. В случае заклинивания необходимо привлекать дополнительные технические и трудовые ресурсы для выполнения расклинивания и извлечения инструментов, что приводит к увеличению перечня операций для выполнения процедуры подводного подсоединения трубопроводов и, следовательно, к увеличению общего времени выполнения процедуры подсоединения.
Таким образом существует производственная необходимость сокращать общее время выполнения процедуры подсоединения, в том числе путем минимизации рисков возникновения внештатных ситуаций, при которых операции по установке, изъятию, подъему сменного оборудования (например, инструментов) при помощи штатного набора инструментов становятся невыполнимы.
Известны решения систем подводного соединения трубопровода, где в перечень штатных инструментов для выполнения подводных операций включены инструмент очистки уплотнительных зон втулок и инструмент установки уплотнительного элемента, пример такой системы указан в патенте GB 2323907 А (опубл. 03.06.1998) Для продольного перемещения указанных сменных инструментов может применяться рама сопряжений, которая устанавливается на опорные компоненты оконечных втулок трубопровода, в которую поочередно устанавливают сменный инструмент очистки уплотнительных зон втулок и сменный инструмент установки уплотнительного элемента. Данная система иллюстрирует общую картину соединения трубопроводов, и, в силу своей масштабности, не может выступать в качестве аналога.
Из существующего уровня техники известен патент компании «Cameron International Corp» - «Гидравлический инструмент и сборочный уплотнительный узел» (патент US 10550657 В2, опубл. 04.02.2020).
Инструмент фиксируют в оборудовании системы подводной добычи (в данном случае в системе подводных колонных головок (далее - СПКГ) с помощью замкового механизма. Инструмент устанавливает и фиксирует металлическое уплотнение продольным усилием, создаваемым, в том числе, с помощью воздействия гидравлики на поршни, входящие в состав инструмента. После установки уплотнения в СПКГ, инструмент отсоединяют от уплотнения вращательным движением, затем инструмент поднимают из оборудования системы подводной добычи.
Недостатки данного устройства:
1) между продольными перемещениями инструмент необходимо проворачивать для корректного выполнения операций по установке уплотнений, что требует непрерывной связи с дополнительными устройствами или платформой через бурильные трубы;
2) в случае механического повреждения порта подачи гидравлики, высок риск повреждения места силового сопряжения с механизмами подъема, что значительно затруднит подъем инструмента на поверхность.
Наиболее близким аналогом, принятым за прототип, является Устройство для соединения труб (патент AU 2008341224 В2, опубл. 02.07.2009) компании «FMC Kongsberg Subsea AS».
Инструмент фиксируют на головке соединительного устройства трубной вставки. Устройство служит для продольного перемещения кольцевого компонента цангового замкового устройства оконечной втулки трубопровода: инструмент продольно перемещает упорное кольцо, которое при перемещении выдвигает и сжимает пальцы цангового замкового устройства на соединительной втулке. Инструмент обеспечивает продольное перемещение упорного кольца с помощью гидравлических цилиндров, на которые подача гидравлики происходит с телеуправляемого необитаемого подводного аппарата (далее - ТНПА).
Недостатком аналога является то, что в случае механического повреждения порта подачи гидравлики во время выполнения операции обжатия цангового замкового устройства, высок риск заклинивания упорного кольца на цанге, что может потребовать использования специализированного оборудования для аварийного снятия инструмента или оконечной втулки трубопровода, и, как следствие, временных затрат.
Задачей изобретения является снижение риска аварийного заклинивания инструментов в оконечной втулке трубопровода.
Техническим результатом изобретения является снижение риска повреждения уплотнительных зон оконечных втулок трубопроводов, уменьшение трудовых и временных затрат на выполнение операций по изъятию инструментов, отсутствие необходимости затрат на разработку специализированного инструмента по изъятию заклинивших инструментов за счет логики гидравлической схемы рамы сопряжения, позволяющей при потере питания с телеуправляемого необитаемого подводного аппарата выдвинуть раму в серединное положение.
Рама сопряжения инструмента с выводом в серединное положение применяется для продольного перемещения сменных изделий ССО к оконечным втулкам трубопроводов для выполнения штатных процедур.
Решение задачи заключается в том, что в раме сопряжения инструмента с выводом в серединное положение, состоящей из приемной рамы, каркаса с направляющими, неподвижно зафиксированными на нем гидравлическим разъемом для соединения с ТНПА, гидравлической системой, содержащей гидроцилиндры, закрепленные на направляющих, согласно изобретению, гидравлическая система дополнительно содержит последовательно соединенные четырехходовой трехпозиционный клапан с фиксированным центральным положением, как минимум, два делителя расхода потока, и, как минимум, два гидроцилиндра перемещения приемной рамы, имеющих пружины.
При этом конструктивно пружины могут располагаться в следующих вариантах исполнения:
1) пружины внутри штоковой и поршневой полостях гидроцилиндров, при этом пружины соединяют поршень и корпус гидроцилиндра;
2) пружины снаружи штоковой и поршневой полостях гидроцилиндров, при этом пружины соединяют подвижную часть гидроцилиндра с каркасом рамы сопряжения.
Операция проворачивания для корректного выполнения операций в раме сопряжения инструмента исключается за счет отсутствия в конструкции срезного штифта.
Конструктивное решение гидравлической системы и работы гидроцилиндров помимо выполнения штатных задач рамы сопряжения, позволяет во время внештатной потери питания на разъеме перевести раму сопряжения в серединное положение, позволяющее произвести штатное извлечение сменного инструмента, в том числе и без повреждений.
Рама сопряжения инструмента с выводом в серединное положение поясняется следующими чертежами:
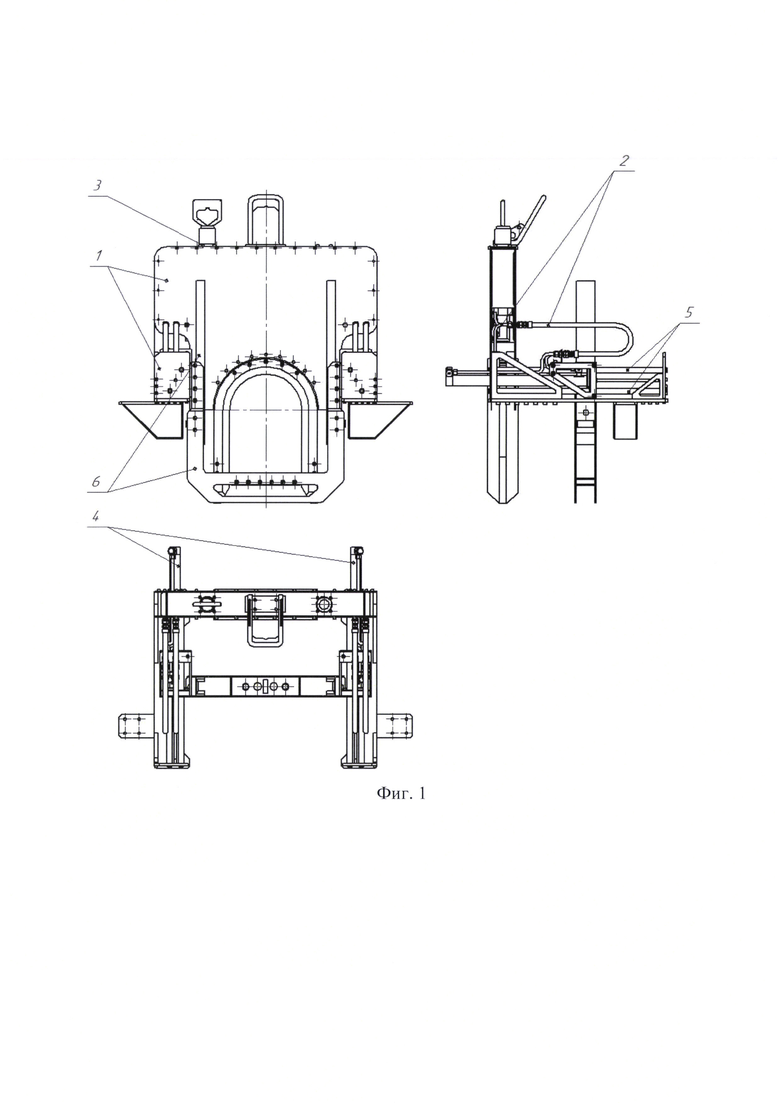
на фиг. 1 изображен общий вид устройства;
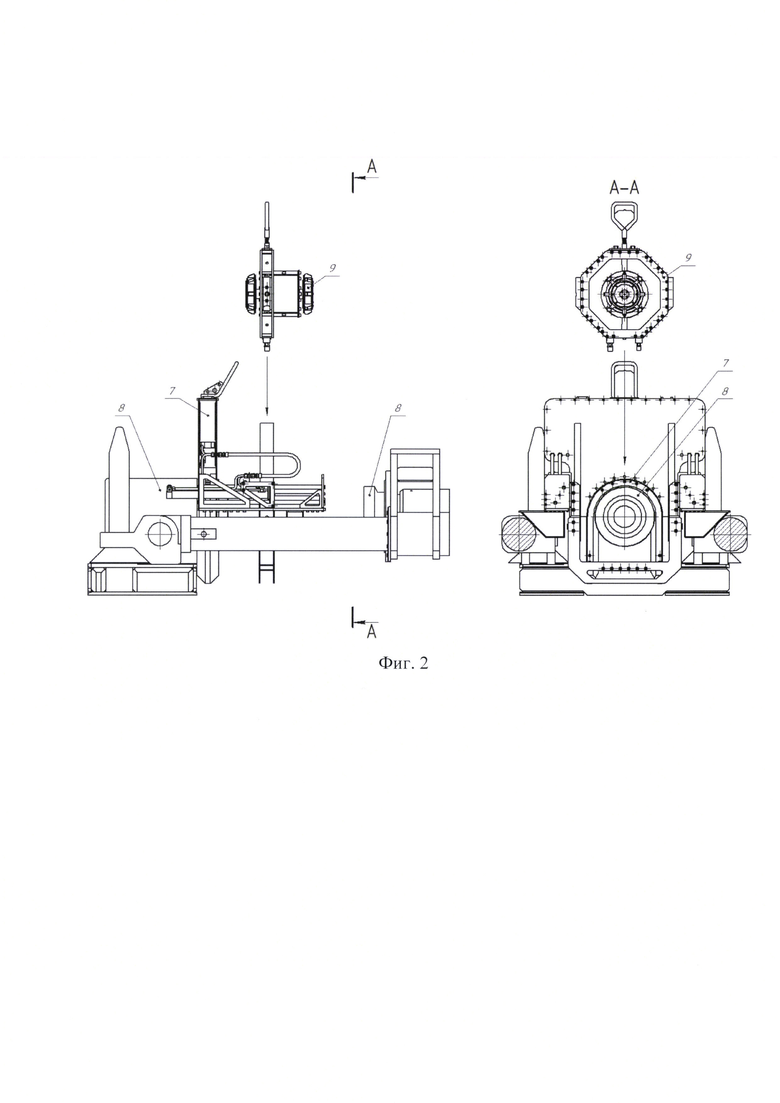
на фиг. 2 изображен общий вид устройства со сменным инструментом и оконечными втулками трубопровода;
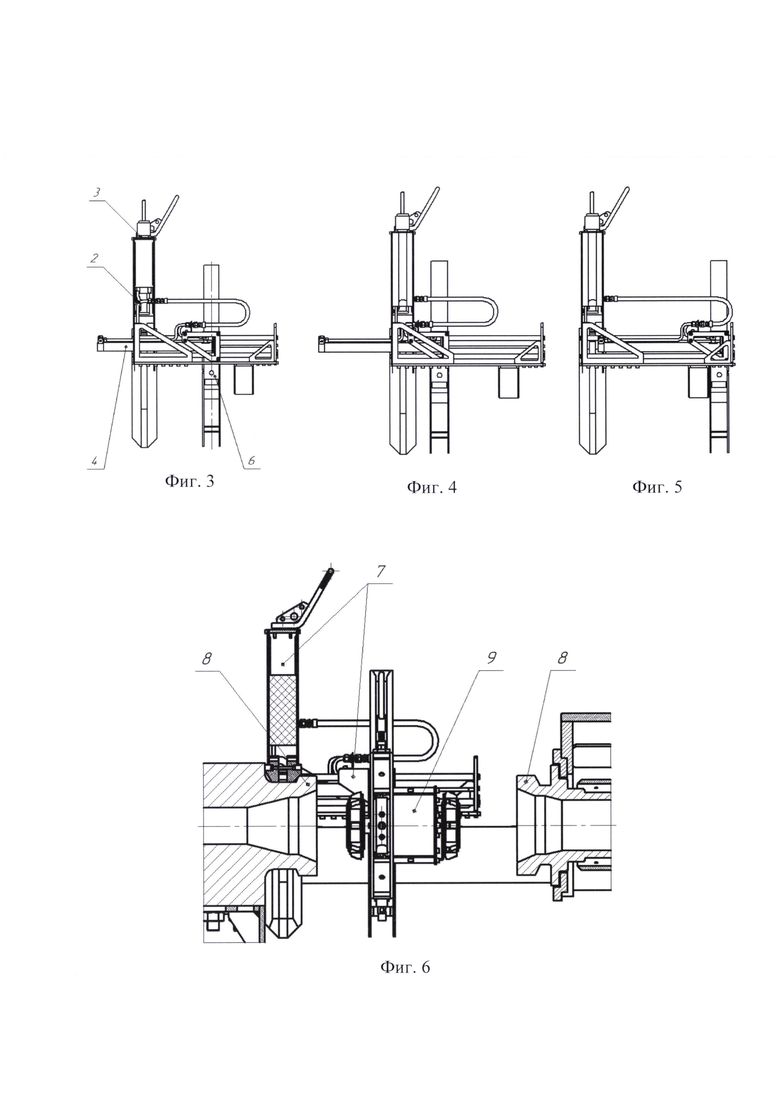
на фиг. 3 показана гидравлическая система со серединным положением приемной рамы (без сменного инструмента);
на фиг. 4 показана гидравлическая система с приемной рамой в первичном крайнем положении (без сменного инструмента);
на фиг. 5 показана гидравлическая система с приемной рамой во вторичном крайнем положении (без сменного инструмента);
на фиг. 6 изображена приемная рама с установленным инструментом в серединном положении;
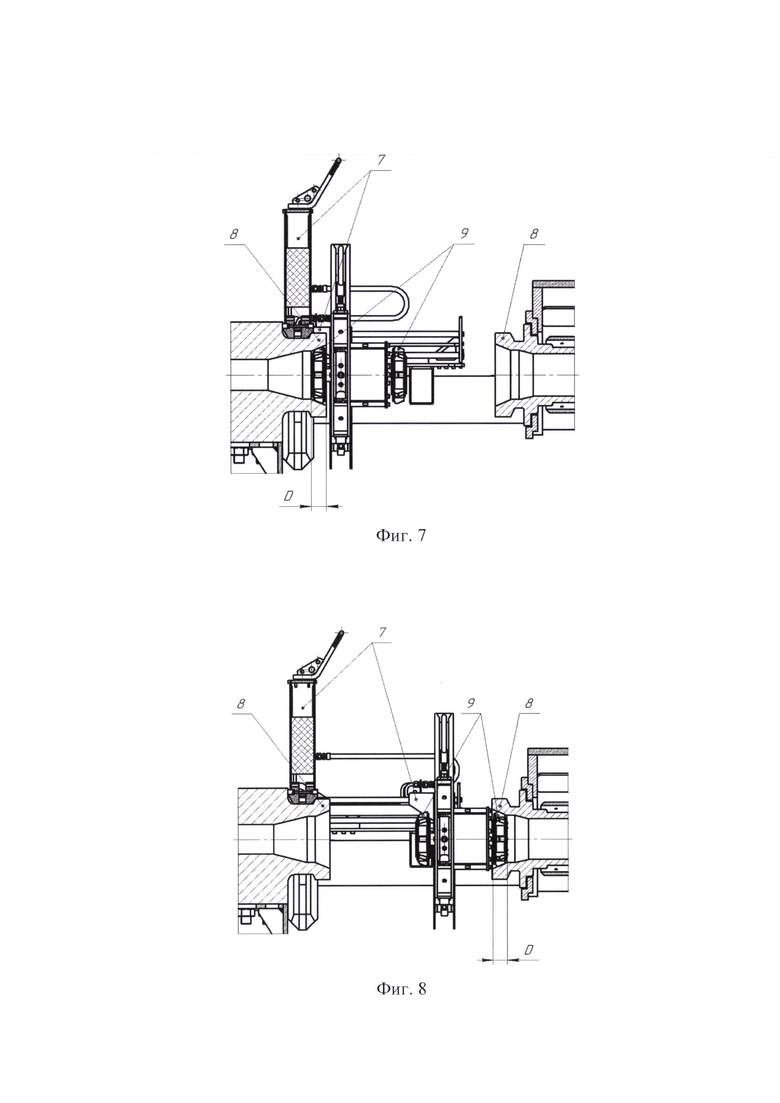
на фиг. 7 изображена приемная рама с установленным инструментом в первичном крайнем положении;
на фиг. 8 изображена приемная рама с установленным инструментом во вторичном крайнем положении;
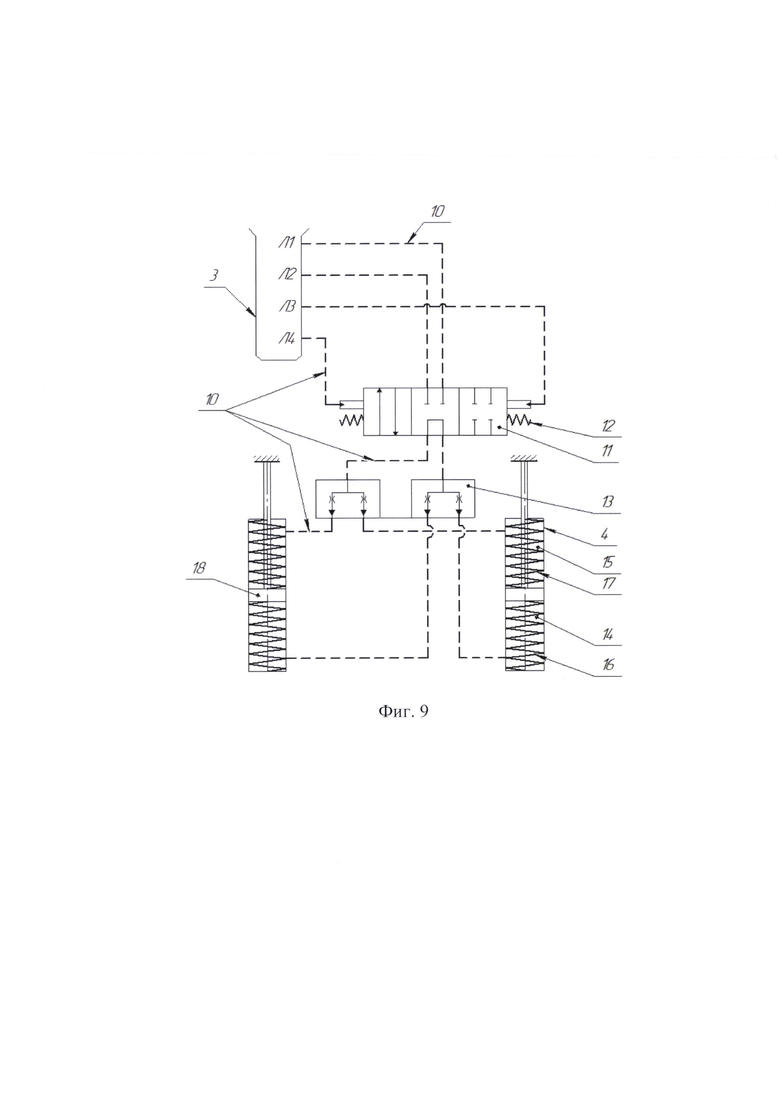
на фиг. 9 приведена схема гидравлической системы рамы сопряжения инструмента с выводом в серединное положение;
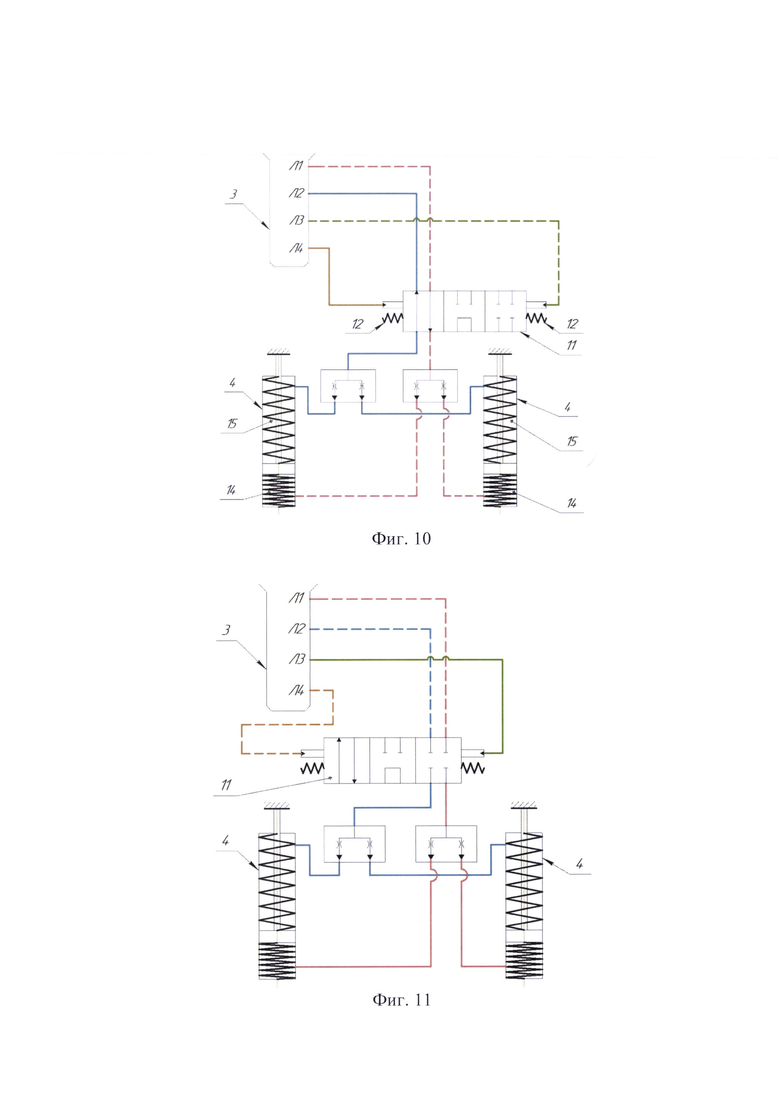
на фиг. 10 показана гидравлическая схема с приемной рамой в первичном крайнем положении;
на фиг. 11 показана гидравлическая схема с приемной рамой в первичном крайнем зафиксированном положении;
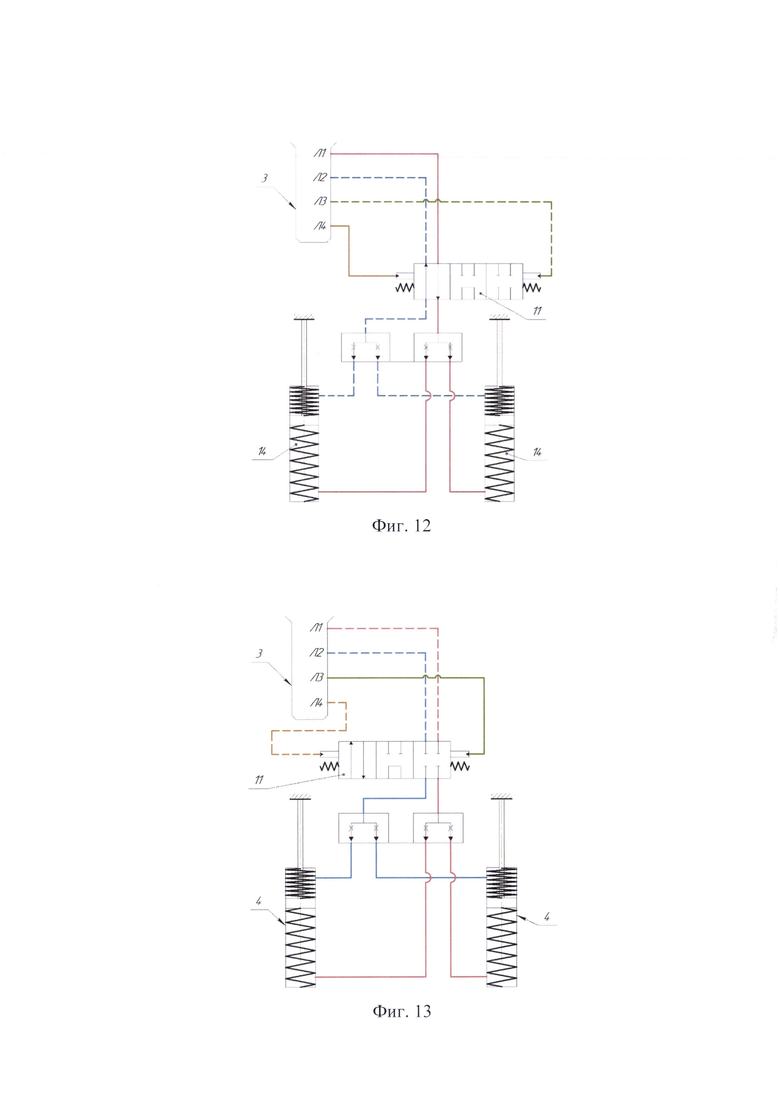
на фиг. 12 показана гидравлическая схема с приемной рамой во вторичном крайнем положении;
на фиг. 13 показана гидравлическая схема с приемной рамой во вторичном крайнем зафиксированном положении;
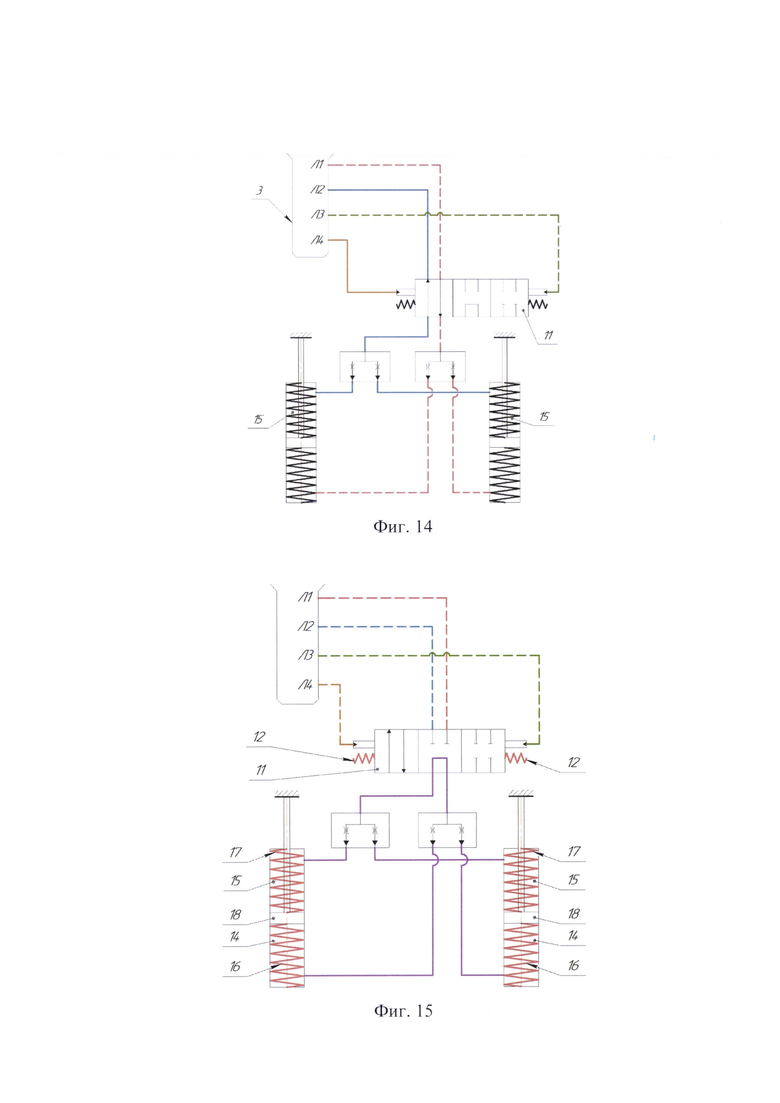
на фиг. 14 показана гидравлическая схема с приемной рамой в серединном положении;
на фиг. 15 показана гидравлическая схема с приемной рамой в серединном обесточенном положении;
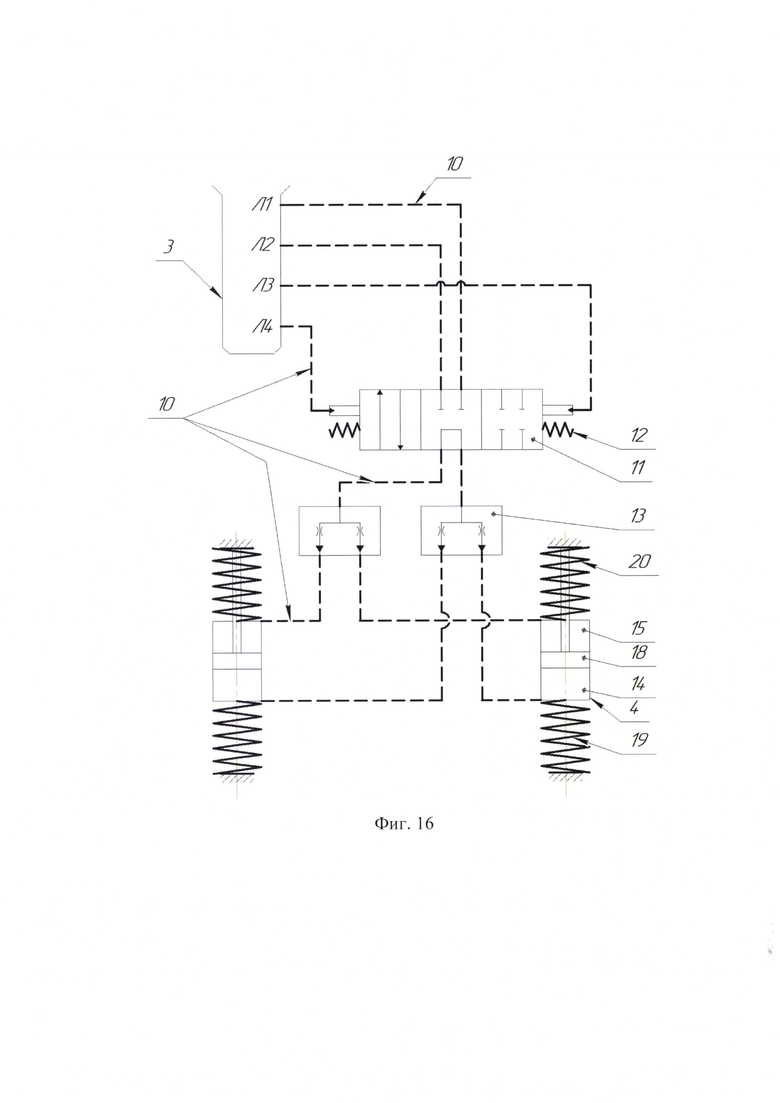
на фиг. 16 приведена схема гидравлической системы рамы сопряжения инструмента с выводом в серединное положение с пружинами гидроцилиндров снаружи штоковой и поршневой полостей;
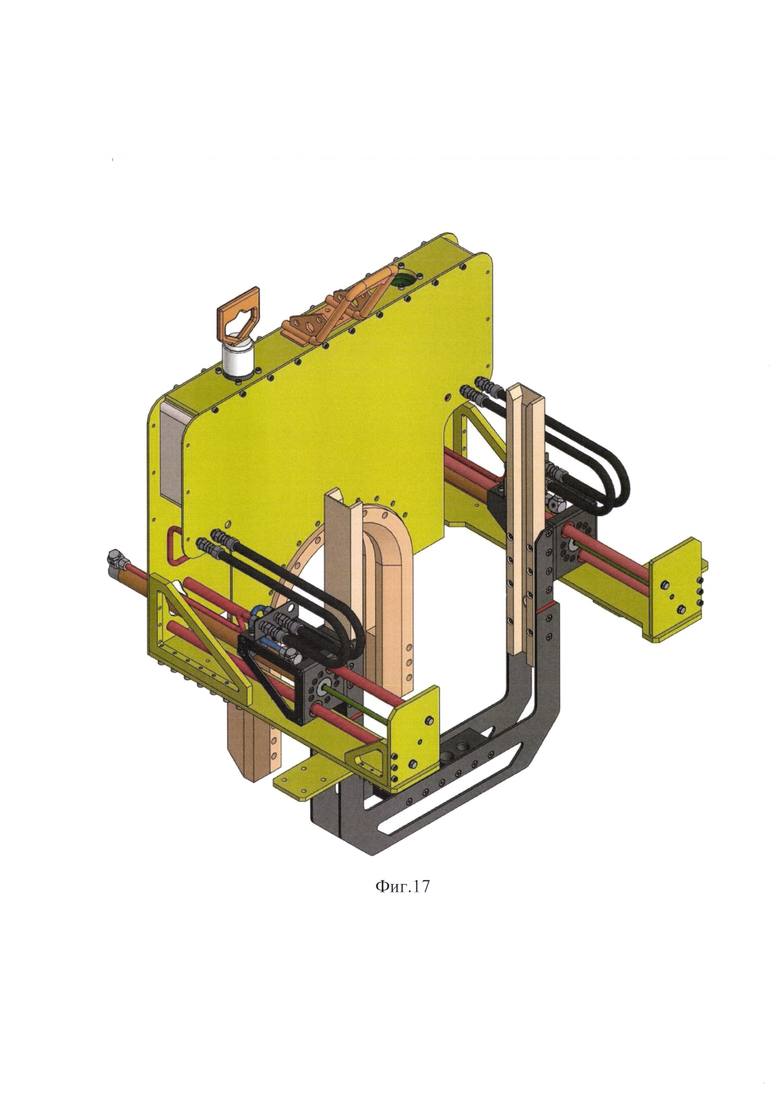
на фиг.17 приведено объемное изображение рамы сопряжения инструмента с выводом в серединное положение.
Каркас 1 служит для восприятия суммарных нагрузок от веса рамы сопряжения и усилий от выдвижения органов гидроцилиндров двухстороннего действия, а также для закрепления на нем гидравлической системы 2, транспортирующей гидравлическую жидкость от гидравлического разъема 3 для соединения с ТНПА к, как минимум, двум гидроцилиндрам 4 (фиг. 1). Компоненты гидравлической системы 2 обеспечивают заданные рабочие характеристики рабочей среды и более детально будут рассмотрены далее.
Гидравлический разъем 3 является узлом подключения гидравлического питания, осуществляемого с ТНПА (в состав описываемого изделия не входит, на изображениях не показан). Рабочие органы гидроцилиндров двухстороннего действия 4 содержат закрепленную на направляющих 5 приемную раму 6, и выполнены с возможностью перемещения приемной рамы (неподвижно закрепленной на гидроцилиндрах 4) при подаче питания с гидравлического разъема 3 через гидравлическую систему 2.
Направляющие 5 неподвижно закреплены на каркасе 1, передают поперечные нагрузки от веса рамы сопряжения во время продольного перемещения рабочих органов гидроцилиндров 4 на каркас 1. Приемная рама 6 предназначена для размещения и фиксации в ней сменных изделий ССО (в состав описываемого изделия не входят, на фиг. 1 не показаны) с помощью манипуляторов ТНПА, а также для восприятия суммарных нагрузок от веса сменных изделий ССО и усилий от гидроцилиндров 4.
Работа устройства осуществляется следующим образом. Раму сопряжений 7 устанавливают на опорные поверхности сборочных узлов оконечных втулок трубопровода 8 (фиг. 2). Инструмент, проводящий очистку втулок 9, или инструмент замены уплотнения устанавливается в приемную раму 6 рамы сопряжений 7 при помощи ТНПА как указано на фиг. 2.
Далее ТНПА подключается к разъему 3 для подачи гидравлической жидкости в гидравлическую систему 2 рамы сопряжений 7. Гидравлическая система 2 распределяет гидравлическую жидкость по гидроцилиндрам 4, которые в свою очередь перемещают приемную раму 6 вместе с установленным в ней сменным инструментом 9 из серединного положения (фиг. 3) в первичное крайнее положение (фиг. 4), затем из первичного крайнего положения приемную раму 6 перемещают во вторичное крайнее положение (фиг. 5). Сменный инструмент на изображениях не показан.
При необходимости, перемещения приемной рамы с установленным инструментом повторяют до завершения операции. По окончании выполнения операций с инструментом 9, приемную раму с установленным инструментом описанными выше методом перемещают в серединное положение (фиг. 6), после чего инструмент 9 и раму сопряжений 7 снимают с оконечных втулок трубопровода вертикально вверх. Снятие инструмента 9 и рамы сопряжений 7 может происходит поочередно или совместно.
Уплотнительные зоны оконечных втулок трубопровода 8 находятся на внутреннем диаметре проходных отверстий втулок, поэтому инструмент 9, устанавливаемый на раму сопряжения 7, во время проведения операций с уплотнительными зонами (что соответствует первичному крайнему (фиг. 7) и вторичному крайнему (фиг. 8) положениям) частично находится внутри оконечных втулок трубопровода 8 на глубине D (фиг. 7, фиг. 8).
Во избежание заклинивания инструмента в оконечных втулках конструктивное решение рамы сопряжения обеспечивает отвод приемной рамы с инструментом в серединное положение (фиг. 3) с помощью подачи гидравлической жидкости в гидроцилиндры 4, а также механическими средствами без подачи гидравлической жидкости в гидроцилиндры 4.
Для выполнения описанных выше штатных операций гидравлическая система 2 рамы сопряжения включает в себя следующие компоненты (фиг. 9):
- гидравлический разъем 3 для соединения с ТНПА, являющийся узлом подачи гидравлического питания в гидравлическую систему 2;
- гидравлические линии 10, представляющие собой трубопровод для транспортировки гидравлической жидкости с заданными рабочими характеристиками, подаваемой от разъема 3, к гидроцилиндрам 4;
- четырехходовой трехпозиционный клапан 11 с фиксированным с помощью пружин 12 центральным положением, положение которого, в соответствии с фиг.9, определяет наличие или отсутствие перетока гидравлической жидкости между разъемом 3 и полостями гидроцилиндров 4, а также определяет наличие или отсутствие перетока гидравлической жидкости между полостями гидроцилиндров 4;
- как минимум, два делителя потока 13, обеспечивающих равный расход гидравлической жидкости, транспортируемой по гидравлическим линиям 10 от разъема 3 к поршневым полостям 14 или штоковым полостям 15 гидроцилиндров 4, а также от поршневых или штоковых полостей гидроцилиндров 4 к разъему 3, а также от поршневых полостей гидроцилиндров 4 к штоковым полостям и от штоковых - к поршневым;
- гидроцилиндры 4, подача гидравлической жидкости в поршневые полости 14 или штоковые полости 15 которых приводит к перемещению подвижной части гидроцилиндра, незафиксированной на каркасе 1 рамы сопряжений 7 и на которой закреплена приемная рама 6 (каркас 1, приемная рама 7 не показаны на фиг. 9). В поршневой полости 14 и в штоковой полости 15 каждого гидроцилиндра 4 размещены пружины 16 и 17, обеспечивающие усилие, достаточное для возврата поршня 18 в положение, соответствующее серединному положению приемной рамы 6, при отсутствии подачи гидравлического питания в гидроцилиндр 4.
Во время установки рамы сопряжения 7 на оконечной втулке или втулках трубопровода 8, в гидравлической системе 2 отсутствует гидравлическое питание от ТНПА, из-за чего клапан 11 находится в центральном положении за счет действия пружин 12, гидроцилиндры 4 находятся положении, соответствующем серединному положению приемной рамы, за счет пружин 16 и 17. После установки рамы сопряжений, в приемную раму 6 вертикально опускают инструмент 9.
В штатном режиме подсоединения, через разъем 3 рамы сопряжения от ТНПА подают гидравлическое питание на линию Л4 (согласно фиг. 10), преодолевая усилие пружин 12 и обеспечивая перевод клапана 11 в крайнее положение, обеспечивающее переток жидкости заданного давления и расхода от порта линии Л2 разъема 3 до полостей 15 гидроцилиндров, а также стравливание жидкости от полостей 14 до порта линии Л1. Затем подают гидравлическое питание на линию Л2, в полости 15 гидроцилиндров, обеспечивая перемещение приемной рамы 6 из серединного положения до первичного крайнего (выдвинутого) положения. Линии Л1, Л3 служат для стравливания жидкости.
Для удержания приемной рамы 6 с установленным в ней инструментом 9 в первичном крайнем (выдвинутом) положении (фиг. 10) (инструмент частично в оконечной втулке трубопровода), подают давление в линию Л3 (линия Л4 служит для стравливания жидкости), переводя клапан 11 в крайнее положение, обеспечивающее закрытый ход гидравлических линий. Гидроцилиндры 4 зафиксированы в текущем положении, рама при этом находится в первичном крайнем зафиксированном положении (фиг. 11).
После выполнения операций на оконечной втулке трубопровода, для проведения операций на другой втулке необходимо разблокировать гидроцилиндры (согласно фиг. 12-14). Для этого подают давление на линию Л4 (линия Л3 служит для стравливания жидкости), обеспечивая перевод клапана 11 в крайнее положение, обеспечивающее переток жидкости от разъема 3 до соответствующих полостей гидроцилиндров. Затем подают гидравлическое питание на линию Л1, в полости 14 гидроцилиндров, обеспечивая перемещение приемной рамы 6 во вторичное крайнее положение (фиг. 12). Линии Л2, Л3 служат для стравливания. Положение гидроцилиндров 4 фиксируют в текущем положении, переводя клапан 11 в крайнее положение, закрывая ток жидкости, рама при этом находится во вторичном крайнем зафиксированном положении (фиг. 13). После завершения подводной операции клапан 11 переводят в крайнее положение, обеспечивая переток жидкости, затем подают гидравлическое питание на линию Л2, в полости 15 гидроцилиндров, обеспечивая возвращение приемной рамы в серединное положение (фиг. 14).
Описанное выше конструктивное решение гидравлической системы 2 и гидроцилиндров 4 помимо выполнения штатных задач рамы сопряжения, позволяет во время внештатной потери питания на разъеме 3 перевести раму сопряжения в серединное положение, позволяющее произвести штатное извлечение сменного инструмента. В случае внештатной потери гидравлического питания на любом этапе операции, центрирующие пружины 12 клапана 11 при отсутствии питания в линиях Л3 и Л4 устанавливают клапан 11 в центральном положении, устанавливая соединение поршневых полостей 14 и штоковых полостей 15 гидроцилиндров 4 рамы сопряжения, через которое происходит переток жидкости и давление в поршневых и штоковых полостях гидроцилиндров уравнивается. В условиях равных давлений в поршневых и штоковых полостях гидроцилиндров и равных усилий, создаваемых указанными давлениями, пружины 16 и 17 гидроцилиндров рамы сопряжения устанавливают поршень 18 в серединное обесточенное положение (фиг. 15).
Устройство может быть выполнено с другим исполнением и расположением пружин 16 и 17 - снаружи штоковой и поршневой полостей гидроцилиндров (соответственно пружины 19 и 20 на фиг. 16 показывают конструктивное исполнение и расположение пружин в данном случае). При этом пара пружин каждого гидроцилиндра соединяет подвижную часть гидроцилиндра с каркасом рамы сопряжения, причем максимальные составляющие векторов силового действия пружин соосны с вектором перемещения поршня гидроцилиндра и разнонаправлены для пары пружин одного гидроцилиндра. Принцип работы системы, последовательность операций и конечный результат при этом сохраняется.
Для наглядности на фиг. 17 приведено объемное изображение рамы сопряжения инструмента с выводом в серединное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАМА СОПРЯЖЕНИЯ ДЛЯ ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ СМЕННОГО ИНСТРУМЕНТА К ОКОНЕЧНЫМ ВТУЛКАМ ТРУБОПРОВОДОВ ПРИ ВЫПОЛНЕНИИ СОЕДИНЕНИЯ ТРУБОПРОВОДОВ | 2021 |
|
RU2780994C1 |
| МЕХАНИЗМ ЗАКРЕПЛЕНИЯ СМЕННОГО ИНСТРУМЕНТА В РАМЕ СОПРЯЖЕНИЯ ДЛЯ ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ СМЕННОГО ИНСТРУМЕНТА ПРИ СОЕДИНЕНИИ ТРУБОПРОВОДОВ | 2022 |
|
RU2810667C1 |
| ИНСТРУМЕНТ ОЧИСТКИ ОКОНЕЧНЫХ СОЕДИНИТЕЛЬНЫХ ВТУЛОК ТРУБОПРОВОДА С ИНТЕГРИРОВАННОЙ КАМЕРОЙ ОСМОТРА | 2023 |
|
RU2823251C1 |
| ИНСТРУМЕНТ ДЛЯ СПУСКА И ПОДЪЕМА ПОДВОДНОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2752537C1 |
| ПОДВОДНОЕ СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ОСУЩЕСТВЛЕНИЯ СОЕДИНЕНИЯ ТРУБОПРОВОДА | 2024 |
|
RU2824696C1 |
| Гидравлическая система управления подводным противовыбросовым оборудованием | 1983 |
|
SU1089240A1 |
| Система гидропривода регулирующей арматуры эксплуатационной линии | 2022 |
|
RU2788273C1 |
| Высокоскоростной молот с двусторонним ударом | 1985 |
|
SU1263416A1 |
| ПЕРЕНОСНОЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ СБОРКИ, РАЗБОРКИ, ПЕРЕМЕЩЕНИЯ И ДРУГИХ ОПЕРАЦИЙ | 1992 |
|
RU2039643C1 |
| Установка для устьевого и скважинного тампонирования | 2024 |
|
RU2831686C1 |
Группа изобретений относится к нефтегазовой промышленности, а именно к способам подводного подсоединения трубопроводов. Рама сопряжения инструмента для соединения трубопровода с возможностью его вывода в серединное положение состоит из приемной рамы под инструмент, каркаса с направляющими, неподвижно зафиксированными на нем гидравлическим разъемом для соединения с телеуправляемым необитаемым подводным аппаратом. Гидравлическая система содержит гидроцилиндры, закрепленные на направляющих. Гидравлическая система дополнительно содержит последовательно соединенные четырехходовой трехпозиционный клапан с фиксированным центральным положением с помощью пружин, как минимум, два делителя расхода потока и, как минимум, два гидроцилиндра двухстороннего действия перемещения приемной рамы. Каждый из гидроцилиндров имеет пару пружин равных усилий внутри штоковой полости и внутри поршневой полости гидроцилиндра соответственно и соединяющих поршень и корпус гидроцилиндра. Максимальные составляющие векторов силового действия пружин соосны с вектором перемещения поршня гидроцилиндра и разнонаправлены для пары пружин одного гидроцилиндра. По второму варианту пружины равных усилий установлены снаружи штоковой полости и снаружи поршневой полости гидроцилиндра соответственно. Достигается технический результат – снижение риска заклинивания сменных изделий и риска повреждения уплотнительных зон оконечных втулок трубопроводов за счет возможности вывода рамы в серединное положение. 2 н.п. ф-лы, 17 ил.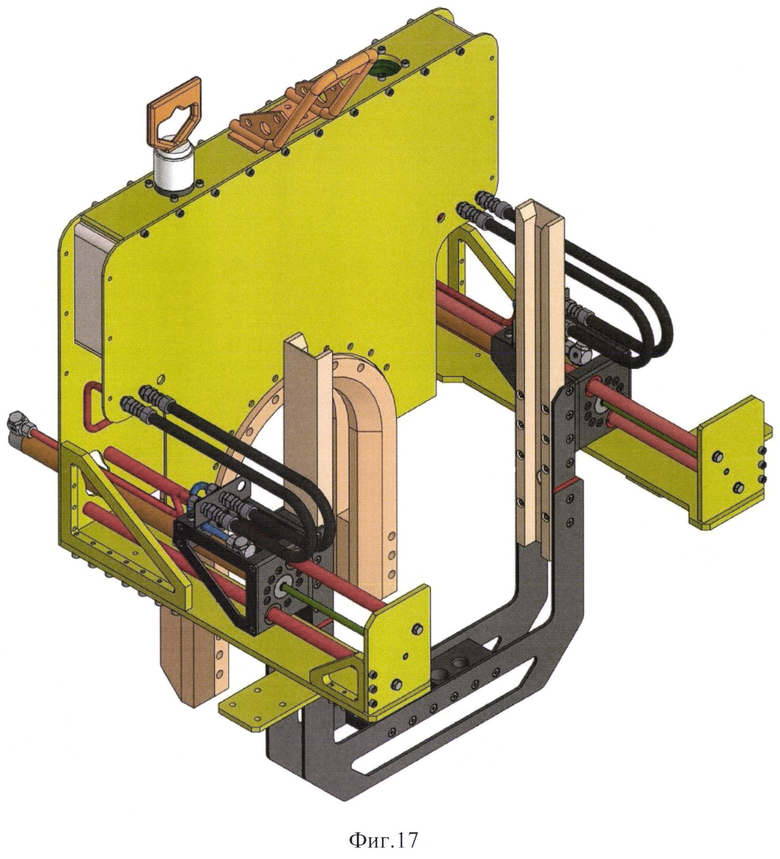
1. Рама сопряжения инструмента для соединения трубопровода с возможностью его вывода в серединное положение, состоящая из приемной рамы под инструмент, каркаса с направляющими, неподвижно зафиксированными на нем гидравлическим разъемом для соединения с телеуправляемым необитаемым подводным аппаратом, гидравлической системой, содержащей гидроцилиндры, закрепленные на направляющих, отличающаяся тем, что гидравлическая система дополнительно содержит последовательно соединенные четырехходовой трехпозиционный клапан с фиксированным центральным положением с помощью пружин, как минимум, два делителя расхода потока и, как минимум, два гидроцилиндра двухстороннего действия перемещения приемной рамы, каждый из которых имеет пару пружин равных усилий внутри штоковой полости и внутри поршневой полости гидроцилиндра соответственно и соединяющих поршень и корпус гидроцилиндра, причем максимальные составляющие векторов силового действия пружин соосны с вектором перемещения поршня гидроцилиндра и разнонаправлены для пары пружин одного гидроцилиндра.
2. Рама сопряжения инструмента для соединения трубопровода с возможностью его вывода в серединное положение, состоящая из приемной рамы под инструмент, каркаса с направляющими, неподвижно зафиксированными на нем гидравлическим разъемом для соединения с телеуправляемым необитаемым подводным аппаратом, гидравлической системой, содержащей гидроцилиндры, закрепленные на направляющих, отличающаяся тем, что гидравлическая система дополнительно содержит последовательно соединенные четырехходовой трехпозиционный клапан с фиксированным центральным положением с помощью пружин, как минимум, два делителя расхода потока и, как минимум, два гидроцилиндра двухстороннего действия перемещения приемной рамы, каждый из которых имеет пару пружин равных усилий снаружи штоковой полости и снаружи поршневой полости гидроцилиндра соответственно и соединяющих поршень и корпус гидроцилиндра, причем максимальные составляющие векторов силового действия пружин соосны с вектором перемещения поршня гидроцилиндра и разнонаправлены для пары пружин одного гидроцилиндра.
| AU 2008341224 A1, 02.07.2009 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПОДВОДНЫХ ТРУБОПРОВОДОВ | 2020 |
|
RU2749624C1 |
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖИВАНИЯ ПОДВОДНОГО ТРУБОПРОВОДА, УКЛАДОЧНАЯ РАМПА, СОДЕРЖАЩАЯ ТАКОЕ НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО, УКЛАДОЧНОЕ СУДНО, СНАБЖЕННОЕ ТАКОЙ УКЛАДОЧНОЙ РАМПОЙ, И СПОСОБ УПРАВЛЕНИЯ РАМПОЙ ДЛЯ УКЛАДКИ ПОДВОДНОГО ТРУБОПРОВОДА | 2009 |
|
RU2496044C2 |
| Конструкция приспособления механического действия для удерживания сменного инструмента в системе соединения оборудования подводной добычи при эксплуатации | 2019 |
|
RU2720045C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПЛАСТИФИКАТОРА ДЛЯ БЕТОННЫХ СМЕСЕЙ | 2006 |
|
RU2323907C1 |
| US 10550657 B2, 04.02.2020. | |||

