Изобретение относится к нефтегазовой промышленности, а именно к способам подводного подсоединения трубопроводов, и предназначено для выполнения работы оператора телеуправляемых необитаемых подводных аппаратов при проведении установки, снятия или замены уплотнения, при помощи сменных инструментов, продольно перемещаемых рамой сопряжения системы соединения оборудования (далее - ССО) в оконечных втулках трубопровода.
Подводные процедуры по подсоединению втулок трубопроводов оборудования систем подводной добычи (например, подводной фонтанной арматуры, манифольда, оконечного устройства трубопроводов) являются длительными, дорогостоящими и трудоемкими мероприятиями с высоким риском для жизни и техники, выполняемыми в рамках обустройства подводных месторождений, что обусловлено привлечением значительного ресурса персонала и морской техники в условиях открытого моря. Подводные операции по подсоединению втулок трубопроводов, в общем случае, включают в себя последовательность следующих операций, выполняемых с помощью набора специализированных инструментов:
- установка и монтаж на дне единиц оборудования системы подводной добычи (далее - СПД), в состав которых входят трубопроводы с вмонтированными оконечными втулками трубопроводов;
- позиционирование оконечных втулок трубопроводов;
- снятие консервационных заглушек и, если требуется, сменных уплотнительных элементов с оконечных втулок трубопроводов;
- подводное обслуживание уплотнительных зон оконечных втулок трубопроводов;
- контроль уплотнительных зон оконечных втулок трубопроводов;
- установка сменных уплотнительных элементов в оконечные втулки трубопроводов;
- стягивание оконечных втулок трубопроводов друг к другу;
- обжатие стянутых оконечных втулок трубопроводов замковыми устройствами для достижения герметичного соединения, работоспособного на срок эксплуатации трубопровода.
Во время выполнения указанных операций существует высокий риск заклинивания инструментов ввиду неточности изготовления обусловленной существующими технологиями обработки изделий, ударного воздействия подводных объектов, коррозии и биологического обрастания, сложности позиционирования инструментов под водой. В целях обеспечения экологической безопасности, а также для предотвращения быстрого изнашивания инструментов, в связи с воздействием агрессивной окружающей среды (морская вода) все сменное оборудование и инструменты необходимо извлекать на поверхность в межоперационный период.
Таким образом, существует производственная необходимость сокращать общее время выполнения процедуры подсоединения, в том числе путем упрощения работы оператора телеуправляемого необитаемого подводного аппарата (далее - ТНПА) при проведении операций по установке, изъятию, подъему сменного оборудования (например, инструментов), за счет снижения времени, затрачиваемого на операции и снижения необходимой концентрации внимания (человеческий фактор).
Из существующего уровня техники известны решения систем подводного соединения трубопровода, где в перечень штатных инструментов для выполнения подводных операций включены инструмент очистки уплотнительных зон втулок и инструмент установки уплотнительного элемента, пример такой системы указан в патенте GB 2323907 А (опубл. 03.06.1998). Для продольного перемещения указанных сменных инструментов может применяться рама сопряжений, которая устанавливается на опорные компоненты оконечных втулок трубопровода, в которую поочередно устанавливают сменный инструмент очистки уплотнительных зон втулок и сменный инструмент установки уплотнительного элемента.
Недостатком этого устройства является отсутствие деления на раму сопряжения и сменный инструмент, таким образом продольное перемещение осуществляется либо при помощи ТНПА, что увеличивает риск аварийной ситуации в связи с человеческим фактором (увеличенная нагрузка на оператора ТНПА), либо за счет силовой установки инструмента, что увеличивает вес каждого инструмента и приводит к необходимости применения как ТНПА, так и дополнительно крана судна, что увеличивает риск аварийной ситуации в связи с человеческим фактором (необходимость согласования работы крановщика и оператора ТНПА).
Также известно устройство для соединения подводных трубопроводов (патент US 6767165 В1, дата публикации 27.07.2004) содержащее каркасную раму, имеющую как минимум одно средство захвата трубы; приспособление для крепления каждого инструмента для выполнения подводных операций к соответствующему дистанционно управляемому транспортному средству; при этом осевой силовой инструмент дополнительно содержит средство для движения одного из трубопроводов в направлении другого, при этом осевое усилие позволяет соединить трубы друг с другом.
Недостатком этого устройства является высокий риск возникновения аварийной ситуации из-за ошибки оператора или необходимость использования дополнительных силовых устройств.
Наиболее близким к заявленному изобретению по технической сущности и достигаемому результату (прототипом) является устройство известное из патента ОАО «Научно-производственное объединение по исследованию и проектированию энергетического оборудования им. И.И. Ползунова» (ОАО «НПО ЦКТИ») - «Конструкция приспособления механического действия для удерживания сменного инструмента в системе соединения оборудования подводной добычи при эксплуатации» (патент: RU 2720045 С1 опубл. 23.04.2020).
Согласно данному техническому решению сменный инструмент (инструмент очистки втулок и инструмент замены уплотнения) устанавливают в раму сопряжения инструментов (применяется для продольно перемещения сменного инструмента) и фиксируют с помощью приспособления механического действия для удерживания сменного инструмента в системе соединения оборудования подводной добычи при эксплуатации. Конструкция имеет не меньше двух рукояток, размещенных на верхней планке, на торце каждой из рукояток закреплены ползуны с возможностью выдвижения вверх и удлинения рукояток. Ползуны имеют возможность движения внутри направляющих втулок, закрепленных на верхней планке с возможностью движения вверх ползунов внутри них. Также ползуны имеют возможность ограничения движения посредством стаканов, закрепленных на каждом ползуне и выполненных с пружиной сжатия. Пружина сжатия расположена между стаканом и верхней планкой корпуса. Внутри корпуса расположены шатунные механизмы и фиксаторы. Каждый шатунный механизм состоит из спаренных шатунов. Каждый фиксатор закреплен на оси внутри корпуса для сменных инструментов.
Недостатками устройства, принятого за прототип, являются:
1. Риск заклинивания одного из двух независимых ползунно-шатунных механизмов, который может привести к перекосу съемного инструмента в раме сопряжения инструментов и повреждению как самого инструмента, так и рамы.
2. Значительно усложненное проведение операции стыковки инструмента к раме сопряжения при помощи ТНПА вследствие необходимости работы ТНПА с двумя рукоятками, поскольку необходимо:
- либо использовать дополнительные приспособления для обеспечения одновременного захвата и подъема рукояток, что увеличивает как трудовые и материальные затраты на их изготовление, так и временные затраты на операцию по монтажу и спуску-подъему.
- либо синхронизировать работу левого и правого манипулятора ТНПА, что сложно осуществимо в связи с прямым управлением манипуляторами оператором ТНПА. При этом при использовании обоих манипуляторов ТНПА, сам ТНПА теряет возможность закрепиться на оборудовании за поручни, в связи с чем возможно столкновение ТНПА с оборудованием под воздействием течения.
Задачей предлагаемого изобретения является снижение сложности проведения операции стыковки инструмента к раме сопряжения при помощи ТНПА и повышение надежности механизма закрепления сменного инструмента.
Технический результат заключается в упрощении конструкции механизма закрепления сменного инструмента в раме сопряжения за счет уменьшения числа рукояток для работы с ТНПА, а именно исполнения его с одной рукояткой, размещенной на верхней пластине механизма, к которой при этом прикреплены два спаренных входных ползуна, а также за счет применения выходных ползунов, использующихся как фиксаторы.
Решение технической задачи заключается в том, что выполненный согласно изобретению механизм закрепления сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при соединении трубопроводов, выполненный с возможностью удерживания сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при проведении технологических операций таких как очистка втулок системы соединения оборудования систем подводной добычи и установка уплотнения во втулки системы соединения оборудования систем подводной добычи, расположенный внутри каркасной рамы с закрепленными, например, с помощью резьбового соединения на ней по периметру пластинами и содержащий два входных ползуна, закрепленных, например, с помощью резьбового соединения на пластинах механизма, причем ползуны имеют возможность движения внутри отверстий, выполненных в верхней пластине рамы сменного инструмента, а на каждый входной ползун установлена пружина сжатия, опирающаяся на пластины механизма и рамы; при этом внутри рамы расположены два коромысла и соединенные с ними выходные фиксаторы сменного инструмента в раме сопряжения, отличающийся тем, что содержит одну рукоятку на верхней пластине механизма, к которой прикреплены два спаренных входных ползуна, а фиксаторами сменного инструмента в раме сопряжения являются ползуны, так, что при автоматическом восстановлении пружинами исходного положения за счет их разнесенного положения обеспечивается синхронное плоско-параллельное перемещение коромысел и продольное перемещение соединенных с ними выходных ползунов.
Сменный инструмент (инструмент очистки втулок и инструмент замены уплотнения) устанавливают в раму сопряжения инструментов при помощи ТНПА, где он фиксируется с помощью механизма закрепления сменного инструмента в раме сопряжения для удерживания сменного инструмента в раме сопряжения для продольного перемещения сменных изделий ССО к оконечным втулкам трубопроводов для выполнения штатных процедур.
В предлагаемом варианте исполнения устройство содержит каркасную раму с закрепленными на ней по периметру, например, восемью пластинами.
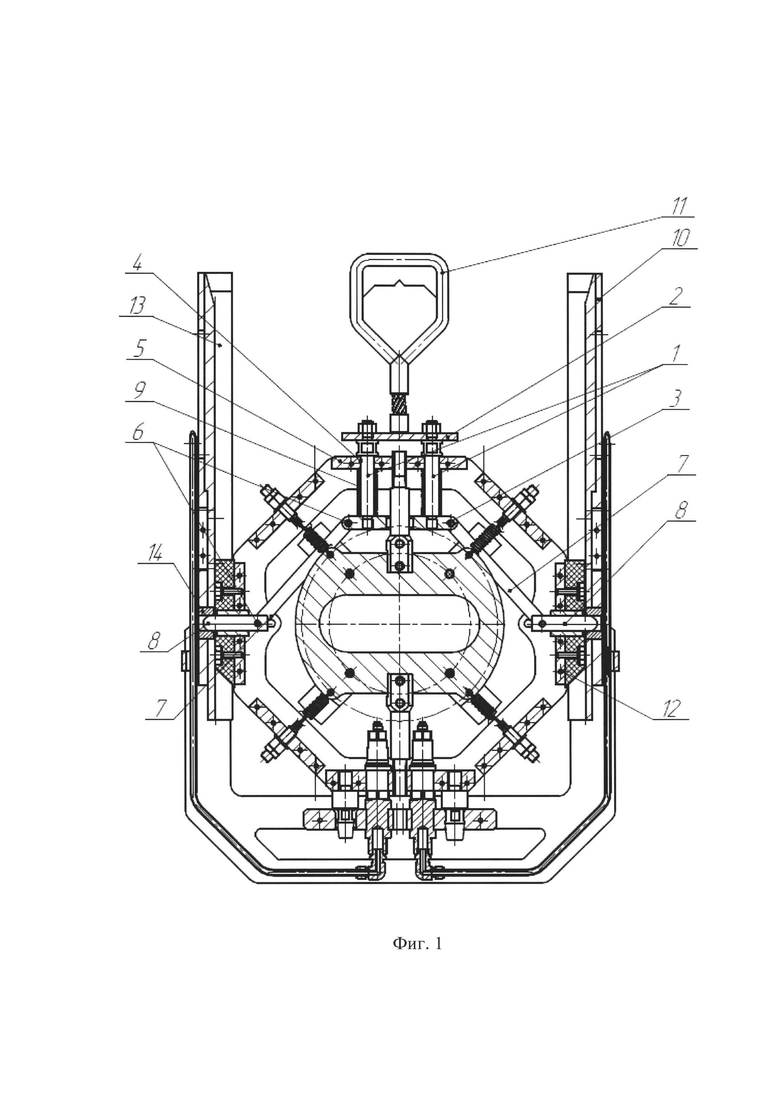
На фиг. 1 изображен общий вид механизм закрепления сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента.
Устройство содержит два спаренных входных ползуна 1, закрепленных, например, с помощью резьбового соединения между параллельными, верхней пластиной 2 и нижней пластиной 3, служащих для обеспечения разнесенного положения спаренных входных ползунов 1, закрепленных перпендикулярно к верхней пластине 2 и нижней пластине 3 и параллельно друг другу, и проходящих через отверстия 4 в пластине рамы механизма 5. К нижней пластине 3, в свою очередь, при помощи двух осей 6 закреплены соответственно два коромысла 7 для передачи усилия на выходные ползуны 8, использующиеся как фиксаторы, через оси 6. При этом обеспечивается синхронное плоскопараллельное перемещение коромысел 7 и продольное перемещение соединенных с ними выходных ползунов 8. На каждом из спаренных входных ползунов 1 между верхней и нижней пластинами 2 и 3 закреплена пружина 9, служащая для накопления механической энергии для обеспечения закрепления сменного инструмента в раме сопряжения 10. За счет разнесенного положения пружин сжатия 9 при восстановлении их исходного положения обеспечивается синхронное плоскопараллельное перемещение коромысел 7 и продольное перемещение соединенных с ними выходных ползунов 8.
Для работы с механизмом закрепления сменного инструмента при помощи ТНПА в его состав включена рукоятка 11, неподвижно закрепленная с помощью, например, сварного соединения на верхней пластине 2. Механизм закрепления сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при соединении трубопроводов установлен в раме сопряжения сменного инструмента 10.
Механизм закрепления сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при соединении трубопроводов работает следующим образом. При установке сменного инструмента в раму сопряжения 10, ТНПА перемещает сменный инструмент за рукоятку 11. Для облегчения работы оператора ТНПА по установке сменного инструмента в раму сопряжения на сменном инструменте выполнены направляющие типа шип 12, а на раме сопряжения направляющие типа паз 13. После того как ТНПА установил сменный инструмент в раму сопряжения в корректное положение, оператор ТНПА отпускает рукоятку 11. За счет энергии накопленной в пружинах 9, установленных на спаренных входных ползунах 1, между нижней пластиной 3 и пластиной рамы механизма 5, содержащей два отверстия (часть несущей рамы сменного инструмента), происходит синхронное вертикальное перемещение спаренных входных ползунов 1 в отверстиях 4, выполненных в пластине рамы механизма 5, что приводит к синхронному вертикальному перемещению осей 6 закрепленных в нижней пластине 3, и за счет коромысел 7 приводит к синхронному горизонтальному перемещению осей 6 закрепленных в коромыслах 7 и выходных ползунах 8, которые в свою очередь синхронно перемещаются в ответные втулки 14 на раме сопряжения 10, в результате происходит закрепление сменного инструмента в раме сопряжения.
Раскрепление происходит в обратном порядке.
Благодаря наличию только одной рукоятки отсутствует необходимость использовать дополнительные приспособления для одновременного захвата и подъема рукояток механизма закрепления сменного инструмента, что позволяет снизить трудовые и материальные затраты на их изготовление, а также временные затраты на операцию по их монтажу и спуску-подъему.
Кроме того, исполнение конструкции предлагаемого изобретения с одной рукояткой исключает необходимость синхронизировать работу левого и правого манипулятора ТНПА и позволяет избежать риска возникновения перекосов сменного инструмента при установке в раму сопряжения.
Таким образом, механизм закрепления сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при соединении трубопроводов позволяет облегчить проведение операции закрепления инструмента в раме сопряжения при помощи ТНПА и повысить надежность работы всего механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конструкция приспособления механического действия для удерживания сменного инструмента в системе соединения оборудования подводной добычи при эксплуатации | 2019 |
|
RU2720045C1 |
| РАМА СОПРЯЖЕНИЯ ДЛЯ ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ СМЕННОГО ИНСТРУМЕНТА К ОКОНЕЧНЫМ ВТУЛКАМ ТРУБОПРОВОДОВ ПРИ ВЫПОЛНЕНИИ СОЕДИНЕНИЯ ТРУБОПРОВОДОВ | 2021 |
|
RU2780994C1 |
| РАМА СОПРЯЖЕНИЯ ИНСТРУМЕНТА ДЛЯ СОЕДИНЕНИЯ ТРУБОПРОВОДА С ВОЗМОЖНОСТЬЮ ЕГО ВЫВОДА В СЕРЕДИННОЕ ПОЛОЖЕНИЕ (ВАРИАНТЫ) | 2021 |
|
RU2778357C1 |
| ИНСТРУМЕНТ ОЧИСТКИ ОКОНЕЧНЫХ СОЕДИНИТЕЛЬНЫХ ВТУЛОК ТРУБОПРОВОДА С ИНТЕГРИРОВАННОЙ КАМЕРОЙ ОСМОТРА | 2023 |
|
RU2823251C1 |
| ПОДВОДНОЕ СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ОСУЩЕСТВЛЕНИЯ СОЕДИНЕНИЯ ТРУБОПРОВОДА | 2024 |
|
RU2824696C1 |
| ИНСТРУМЕНТ ДЛЯ СПУСКА И ПОДЪЕМА ПОДВОДНОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2752537C1 |
| Узел крепления сменных частей штампа к плитам блока | 1987 |
|
SU1496896A1 |
| Инструмент для спуска и подъема | 2019 |
|
RU2724003C1 |
| Вайма для сборки рамок корпусов струнных музыкальных инструментов | 1987 |
|
SU1444146A1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
Изобретение относится к нефтегазовой промышленности, а именно к способам подводного подсоединения трубопроводов, и предназначено для проведения установки, снятия и замены уплотнения при помощи сменных инструментов. Механизм закрепления сменного инструмента в раме сопряжения выполнен с возможностью удерживания сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента и расположен внутри каркасной рамы с закрепленными на ней по периметру пластинами. Два входных ползуна выполнены на пластинах механизма. Ползуны имеют возможность движения внутри отверстий, выполненных в верхней пластине каркасной рамы сменного инструмента. На каждый входной ползун установлена пружина сжатия, опирающаяся на пластины механизма и рамы. Внутри рамы расположены два коромысла и соединенные с ними выходные фиксаторы сменного инструмента в раме сопряжения. На верхней пластине механизма закреплена рукоятка, к которой прикреплены два спаренных входных ползуна. Фиксаторами сменного инструмента в раме сопряжения являются ползуны, так что при автоматическом восстановлении пружинами исходного положения за счет их разнесенного положения обеспечивается синхронное плоскопараллельное перемещение коромысел и продольное перемещение соединенных с ними выходных ползунов. Достигается технический результат – упрощение проведения операции закрепления инструмента в раме сопряжения и повышение надежности работы всего механизма. 1 ил.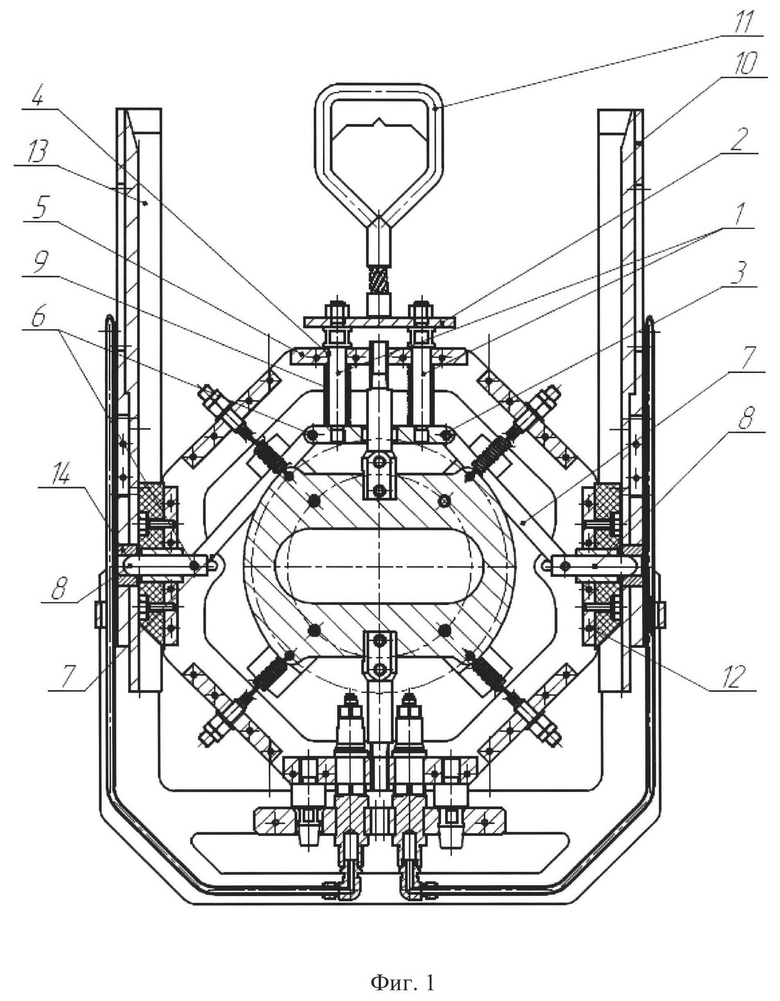
Механизм закрепления сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при соединении трубопроводов, выполненный с возможностью удерживания сменного инструмента в раме сопряжения для продольного перемещения сменного инструмента при проведении технологических операций, расположенный внутри каркасной рамы с закрепленными на ней по периметру пластинами и содержащий два входных ползуна, закрепленных на пластинах механизма, причем ползуны имеют возможность движения внутри отверстий, выполненных в верхней пластине рамы сменного инструмента, а на каждый входной ползун установлена пружина сжатия, опирающаяся на пластины механизма и рамы; при этом внутри рамы расположены два коромысла и соединенные с ними выходные фиксаторы сменного инструмента в раме сопряжения, отличающийся тем, что содержит одну рукоятку на верхней пластине механизма, к которой прикреплены два спаренных входных ползуна, а фиксаторами сменного инструмента в раме сопряжения являются ползуны, так что при автоматическом восстановлении пружинами исходного положения за счет их разнесенного положения обеспечивается синхронное плоскопараллельное перемещение коромысел и продольное перемещение соединенных с ними выходных ползунов.
| Конструкция приспособления механического действия для удерживания сменного инструмента в системе соединения оборудования подводной добычи при эксплуатации | 2019 |
|
RU2720045C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СПОСОБ АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ И СОЕДИНЕНИЯ КОМПОНЕНТОВ | 2012 |
|
RU2605102C2 |
| 0 |
|
SU152450A1 | |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СПОСОБ АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ И СОЕДИНЕНИЯ КОМПОНЕНТОВ | 2012 |
|
RU2605102C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПЛАСТИФИКАТОРА ДЛЯ БЕТОННЫХ СМЕСЕЙ | 2006 |
|
RU2323907C1 |
| US 6767165 В1, 27.07.2004. | |||

