Изобретение относится к авиационной технике, а именно к способам воспроизведения на пилотажном стенде эффекта от воздействия перегрузки на рычаг управления, и может быть использовано на пилотажных стендах и тренажерах при подготовке летного состава к выполнению маневров в условиях действия больших перегрузок.
Известен способ моделирования полета летательного аппарата (ЛА), проводимый экипажем на пилотажном стенде (RU 2484535 C1, G09B 9/08, от 06.12.2011) включающий формирование виртуальных трехмерных изображений объектов окружающей обстановки с помощью системы визуализации моделирующего комплекса, снабженного макетом летательного аппарата, и имитацию полета летательного аппарата. Также известен способ моделирования динамики полета летательного аппарата (RU 2734270 C1, G09B 9/08, G09B/16 от 06.02.2020), включающий изменение оператором положения рычагов управления, передачу информации об изменении положения этих рычагов в блок-вычислитель динамики движения летательного аппарата, расчет в блоке-вычислителе параметров движения летательного аппарата, в том числе перегрузки, и визуализацию на основе этих параметров приборов и внекабинной обстановки и позволяющий моделировать физиологическую реакцию человека на действие перегрузки.
Известен способ моделирования динамики полета летательного аппарата, заключающийся в том, что в блоке математической модели летательного аппарата производится расчет параметров движения летательного аппарата, в том числе нормальной перегрузки и угловых ускорений, оператор, находясь в макете летательного аппарата воздействует на рычаги управления, информация о положении этих рычагов передается в блок математической модели, на основе рассчитанных в блоке математической модели параметров движения летательного аппарата формируются виртуальные трехмерные изображения, отображаемые с помощью системы визуализации моделирующего комплекса (RU 2484535 С1, G09B 9/08, от 06.12.2011). При этом, в данном способе не учитывается воздействие на рычаг управления рассчитанных при моделировании нормальной перегрузки и угловых ускорений.
Наиболее близким по технической сущности к заявленному способу, является способ патент № RU 2734270 C1, G09B 9/08, G09B/16 от 06.02.2020, включающий изменение оператором положения рычагов управления, передачу информации об изменении положения этих рычагов в блок-вычислитель динамики движения летательного аппарата, расчет в блоке-вычислителе параметров движения летательного аппарата, в том числе нормальной перегрузки и визуализацию на основе этих параметров показаний приборов и внекабинной обстановки. При этом, информацию об отклонении рычагов управления оператором, поступающую в блок-вычислитель динамики движения летательного аппарата корректируют в зависимости от рассчитанной в блоке-вычислителе динамики движения летательного аппарата перегрузки, таким образом моделируя физиологическую реакцию человека на перегрузку, но при этом не учитывая ее воздействие на рычаг управления.
Отличительной особенностью предлагаемого способа, является то, что способ подразумевает моделирование не самой перегрузки, ощущений от ее воздействия или физиологическую реакцию человека на перегрузку, а результат воздействия перегрузки и угловых ускорений летательного аппарата на рычаг управления (штурвал, боковую или центральную ручку), проявляющийся в их самопроизвольном отклонении.
Задачей и техническим результатом заявленного способа является повышение достоверности моделирования полета на наземных пилотажных стендах.
Задача и технический результат достигаются изменением оператором положения рычагов управления, передачей информации об изменении положения рычагов в блок-вычислитель динамики движения летательного аппарата, расчетом в блоке-вычислителе параметров движения летательного аппарата, в том числе нормальной перегрузки и угловых ускорений. При этом моделируется движение рычага управления под действием перегрузки, с учетом характеристик его загрузки. Вычисленное требуемое дополнительное отклонение воспроизводится электромеханической системой загрузки рычагов управления. Таким образом, моделируется воздействие перегрузки на рычаг управления, что ощущается летчиком и сказывается на его управляющих действиях.
Перечень фигур:
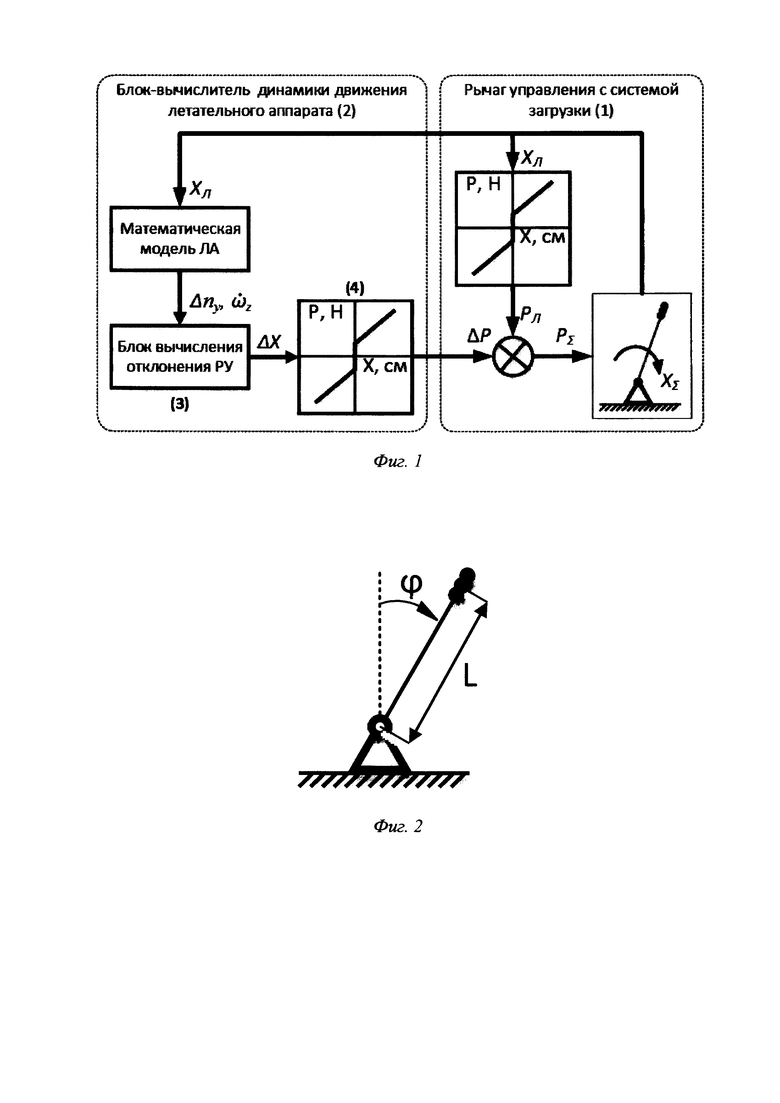
Фиг. 1 Структурная схема предлагаемого способа воспроизведения условий полета на пилотажном стенде.
Фиг. 2 Геометрические параметры отклонения рычага управления, используемые в расчетах
Схематично способ представлен на фиг.1, где ΔХ - отклонение рычага управления под действием перегрузки и углового ускорения, ΔР - дополнительное усилие, которое необходимо подать на рычаг управления, чтобы он отклонился на ΔХ, Рл - усилие, приложенное летчиком к рычагу управления, Хл - перемещение рычага управления под действием Рл.
Реализация способа осуществляется в среде моделирующего комплекса пилотажного стенда в цепи «рычаг управления с системой загрузки -1, блок-вычислитель динамики движения летательного аппарата - 2» посредством введения в эту цепь блока вычисления отклонения рычага управления в зависимости от действующей перегрузки и углового ускорения (3), а также блока перевода этого отклонения в требуемое усилие (4).
Отклонение рычага управления под действием перегрузки и углового ускорения летательного аппарата является суммой двух составляющих - отклонения, вызванного перегрузкой, и отклонения, вызванного угловым ускорением:
где  - отклонение, вызванное перегрузкой,
- отклонение, вызванное перегрузкой,  - отклонение, вызванного угловым ускорением.
- отклонение, вызванного угловым ускорением.
Под действием перегрузки происходит отклонение рычага управления и возникают соответствующие моменты: инерции, демпфирования, от загрузочных пружин. Уравнение моментов имеет вид:

где m - масса рычага управления; g - ускорение свободного падения; L - длина рычага управления (фиг.2); Δny - перегрузка; ϕ - угол отклонения рычага управления от вертикальной оси (фиг.2); Izz - момент инерции рычага управления;  - вторая производная от угла отклонения рычага управления от вертикальной оси;
- вторая производная от угла отклонения рычага управления от вертикальной оси;  - коэффициент демпфирования рычага управления;
- коэффициент демпфирования рычага управления;  - первая производная от угла отклонения рычага управления от вертикальной оси; Рϕ - жесткость загрузочной пружины.
- первая производная от угла отклонения рычага управления от вертикальной оси; Рϕ - жесткость загрузочной пружины.
Из уравнения моментов выражается передаточная функция отклонения рычага управления от перегрузки:

где  - передаточная функция отклонения рычага управления от перегрузки, s - Оператор Лапласа.
- передаточная функция отклонения рычага управления от перегрузки, s - Оператор Лапласа.
Аналогично записывается составляющая от углового ускорения:


где  - вторая производная от отклонения рычага управления под действием углового ускорения летательного аппарата относительно оси z;
- вторая производная от отклонения рычага управления под действием углового ускорения летательного аппарата относительно оси z;  - угловое ускорение летательного аппарата относительно оси z;
- угловое ускорение летательного аппарата относительно оси z;  - коэффициент демпфирования рычага управления;
- коэффициент демпфирования рычага управления;  - первая производная от отклонения рычага управления под действием углового ускорения летательного аппарата относительно оси z;
- первая производная от отклонения рычага управления под действием углового ускорения летательного аппарата относительно оси z;  - жесткость загрузочной пружины;
- жесткость загрузочной пружины;  - отклонение рычага управления под действием углового ускорения летательного аппарата относительно оси z; Wxωz(s) - передаточная функция отклонения рычага управления от углового ускорения относительно оси z.
- отклонение рычага управления под действием углового ускорения летательного аппарата относительно оси z; Wxωz(s) - передаточная функция отклонения рычага управления от углового ускорения относительно оси z.
По приведенным выше передаточным функциям в блоке вычисления отклонения рычага управления в зависимости от действующей перегрузки и углового ускорения рассчитываются соответствующие компоненты  формирующие суммарное отклонение рычага управления ΔХ.
формирующие суммарное отклонение рычага управления ΔХ.
Так как все современные пилотажные стенды оснащены электромеханической системой загрузки РУ реализация предлагаемого способа не представляет сложностей. Таким образом, заявленное изобретение позволяет повысить реалистичность моделирования полета с большими перегрузками за счет создания эффекта от действия нормальной перегрузки и угловых ускорений летательного аппарата на рычаг управления, что сказывается на управляющих действиях летчика и в результате позволит повысить эффективность наземных исследований характеристик устойчивости и управляемости летательных аппаратов без необходимости применения дополнительного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования динамики полёта летательного аппарата | 2020 |
|
RU2734270C1 |
| Способ моделирования динамики полета летательного аппарата | 2024 |
|
RU2820152C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Способ воспроизведения условий полета при помощи использования технологии виртуальной реальности на настольном пилотажном стенде для проведения эргономических исследований по информационно-управляющему полю пилотажной кабины | 2022 |
|
RU2793663C1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| КРЕСЛО ПИЛОТАЖНОГО ТРЕНАЖЁРА С ИМИТАТОРАМИ ВИБРАЦИЙ И УДАРОВ | 2014 |
|
RU2555053C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| ПИЛОТАЖНЫЙ СТЕНД МАНЕВРЕННОГО САМОЛЕТА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ОГРАНИЧИТЕЛЕМ ПРЕДЕЛЬНЫХ РЕЖИМОВ | 2020 |
|
RU2753025C1 |
Изобретения относятся к авиационной технике, а именно к способам моделирования полета на пилотажных стендах. Способ воспроизведения воздействия перегрузки на рычаг управления включает расчет параметров движения летательного аппарата, в том числе нормальной перегрузки и угловых ускорений в блоке математической модели летательного аппарата, воздействие летчика или оператора на рычаги управления и передачу информации о положении этих рычагов в блок математической модели. При этом на пилотажном стенде воспроизводится самопроизвольное отклонение рычага управления под воздействием рассчитанной в блоке-вычислителе динамики движения летательного аппарата перегрузки и углового ускорения. Повышается уровень подготовки обучаемых. 2 ил.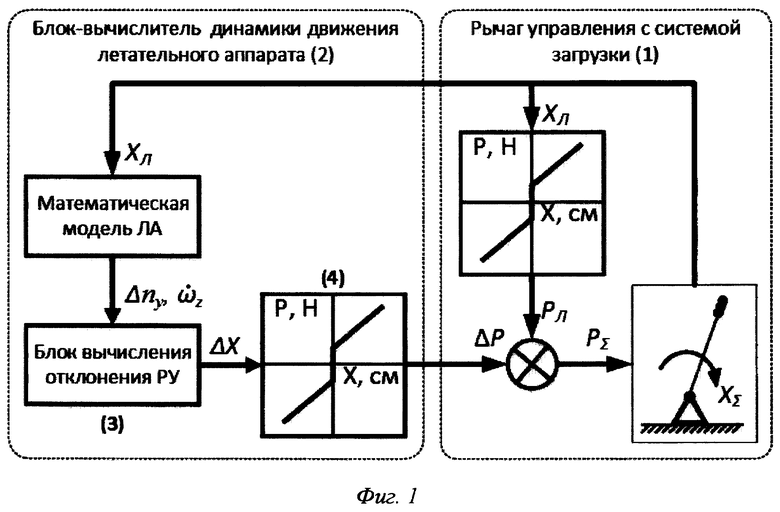
Способ воспроизведения условий полета на пилотажном стенде, включающий изменение оператором положения рычагов управления, передачу информации об изменении положения этих рычагов в блок-вычислитель динамики движения летательного аппарата, расчет в блоке-вычислителе параметров движения летательного аппарата, в том числе нормальной перегрузки и угловых ускорений, отличающийся тем, что в зависимости от перегрузки, рассчитанной в блоке-вычислителе динамики движения летательного аппарата, моделируют результат воздействия перегрузки и угловых ускорений летательного аппарата на рычаги управления, проявляющийся в их самопроизвольном отклонении.
| Способ моделирования динамики полёта летательного аппарата | 2020 |
|
RU2734270C1 |
| СИСТЕМА ЗАГРУЗКИ РЫЧАГОВ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2005 |
|
RU2298836C2 |
| US 10474237 B2, 12.11.2019. | |||

