Изобретение относится к тренажеростроению, преимущественно авиационному, в частности к устройствам имитации систем управления летательного аппарата (ЛА).
Имитаторы систем управления ЛА входят в состав авиационных тренажеров (AT) и обеспечивают привитие обучаемому навыков управления ЛА путем моделирования логики и законов работы систем управления и имитации загрузки рычагов управления AT, а именно создания усилий на рычагах управления AT, аналогичных усилиям, ощущаемым летчиком на всех этапах полета.
Усилия на рычагах управления создаются системами загрузки, имеющими несколько (по количеству рычагов управления) независимых кинематических каналов, исполнительные элементы которых управляются, как правило, общим вычислителем. Каждый канал системы загрузки включает в себя силовой привод с блоком управления, устройство, обеспечивающее механическую связь привода с рычагом управления, датчики усилий и перемещений [1, стр.56].
Принцип действия всех известных систем загрузки заключается в моделировании движения массы, эквивалентной распределенной массе механической проводки и рычага управления ЛА, под действием всех приложенных усилий и в перемещении рычага управления с помощью силового привода в соответствии с моделируемыми параметрами движения.
Усилие, прикладываемое летчиком к рычагу управления, измеряется датчиком, установленным в механической проводке между рычагом управления и силовым приводом. Усилия, с которыми должны действовать на механическую проводку механизмы и рулевые поверхности системы управления, решаются в вычислителе в зависимости от положения рычага управления, от параметров имитируемого полета, а также от кинематических и конструктивных особенностей системы управления. Положение рычага управления измеряется датчиком перемещений, механически соединенным с рычагом управления.
Известны две основные схемы систем загрузки, отличающиеся построением модели и включением силового привода. В одной из них привод выполнен замкнутым собственной обратной связью по положению, т.е. является следящим. Он отрабатывает сигнал заданного положения рычага управления, поступающий из модели, которая полностью реализуется в вычислителе. Во второй схеме привод замыкается собственной обратной связью по скорости, т.е. является следящим приводом регулируемой скорости, который включается в состав модели в качестве интегрирующего звена, участвующего в решении уравнения движения рычага управления. Он отрабатывает сигнал заданной скорости движения рычага управления, поступающий из вычислителя [1, стр.56]. И в том и в другом случае силовой привод осуществляет перемещение рычага управления в соответствии с параметрами (положением или скоростью), заданными вычислителем.
В зависимости от объема и сложности реализуемых моделей в системах загрузки используются цифровые, цифроаналоговые или аналоговые вычислители.
Системы загрузки могут быть выполнены как на базе гидравлического, так и на базе электрического силового привода [1, стр.56].
Одним из основных недостатков всех известных систем загрузки является их склонность к потере устойчивости, присущая следящим системам [1, стр.57]. Как правило, для выполнения требований по точности отслеживания входного сигнала системы должны иметь такое значение общего коэффициента усиления, при котором они либо теряют устойчивость, либо имеют сильную склонность к колебаниям. Это приводит к необходимости применения специальных корректирующих средств, а в следящих системах с датчиком усилий в контуре управления, зачастую, и к необходимости снижения требований к качеству процесса автоматического регулирования, то есть к ухудшению воспроизведения характеристик моделируемых систем управления ЛА. В этих системах в процессе взаимодействия датчика усилий с рычагом управления и летчиком возникают дополнительные факторы, отрицательно сказывающиеся на устойчивости. Во-первых, при перемещении рычага управления силовым приводом датчик усилий воспринимает инерционную упругомассовую нагрузку рычага управления, образуя тем самым паразитный контур управления, в котором существуют условия потери устойчивости. Во-вторых, при взаимодействии силового привода с летчиком, зажавшим рычаг управления, могут возникнуть колебания вследствие фазового запаздывания привода, работающего в следящем режиме. В-третьих, применяемые в системах тензометрические датчики усилий имеют частотный диапазон, не превышающий 25 Гц, и запаздывания, вносимые ими в контур управления, отрицательно сказываются на устойчивости систем.
Другой характерный недостаток всех известных систем загрузки связан с тем, что датчик усилий выдает достоверную информацию об усилиях, прикладываемых летчиком к рычагу управления, только в статическом режиме, то есть при неподвижном рычаге управления. При перемещении датчик усилий воспринимает, кроме усилия летчика, еще и инерционную упругомассовую нагрузку рычага управления, силового привода, и дополнительные усилия, возникающие вследствие фазового запаздывания силового привода, внося тем самым существенные искажения в процесс воспроизведения динамических характеристик моделируемых систем управления ЛА.
Наиболее близкой к заявляемой системе является электрическая система загрузки ECoL-8000 (Electrical Control Loading) фирмы Fokker Control Systems BV, Нидерланды [1, стр.57-58].
Трехканальная система загрузки ECoL-8000 включает в себя цифровой вычислитель и три независимых кинематических канала с исполнительными блоками загрузки. Каждый исполнительный блок загрузки содержит силовой привод с коллекторным электродвигателем постоянного тока типа Н, механически связанный с рычагом управления и снабженный блоком управления и контроля, датчиками усилия, положения и блоком питания.
В цифровом вычислителе реализуется модель системы управления ЛА, вычисляются и передаются в каждый исполнительный блок загрузки сигналы усилий, с которыми элементы и устройства системы управления ЛА должны действовать на каждый рычаг управления в зависимости от его положения и от параметров имитируемого полета. Эти сигналы поступают на входы блоков управления и контроля. На другие входы этих блоков поступают измеряемые датчиками сигналы усилий, прикладываемых летчиком к рычагам управления. В микроконтроллерах блоков управления и контроля моделируются движения масс, эквивалентных распределенным массам механических проводок и рычагов управления ЛА под действием приложенных усилий, а также усилий трения, и вычисляются заданные положения рычагов управления в каждый момент времени. Силовые электроприводы, замкнутые собственными обратными связями по положению, отрабатывают эти сигналы и перемещают механически связанные с ними рычаги управления в заданные положения. То есть система загрузки ECoL-8000 выполнена по типовой для данного вида систем схеме со следящим силовым приводом со всеми ее характерными недостатками, такими как склонность к потере устойчивости системы при широком диапазоне изменения градиентов загрузки и наличие динамических искажений информации датчика усилий. Это, в свою очередь, ведет к ухудшению воспроизведения характеристик моделируемых систем и, соответственно, к выработке у обучаемого ложных навыков управления ЛА.
Частичная ликвидация указанных недостатков приводит к существенному усложнению конструкции системы и всего процесса моделирования в целом за счет необходимости применения специальных программных и аппаратных корректирующих средств, обеспечивающих устойчивость и компенсацию динамических погрешностей системы.
Предлагаемая электрическая система загрузки рычагов управления тренажера, преимущественно авиационного, позволяет обеспечить устойчивость и повысить качество воспроизведения усилий в широком диапазоне изменения градиентов загрузки при значительном упрощении конструкции системы и всего процесса моделирования в целом.
Указанный технический результат достигается тем, что в системе загрузки рычагов управления тренажера, преимущественно авиационного, включающей вычислитель и несколько (по количеству рычагов управления) исполнительных блоков загрузки, каждый из которых содержит силовой электропривод, механически связанный с рычагом управления и снабженный датчиком положения, каждый исполнительный блок загрузки для обеспечения прямого преобразования сигнала заданного усилия в механическое усилие на рычагах управления снабжен управляемым источником тока, при этом вход вычислителя соединен с датчиком положения, а выход - с входом управляемого источника тока, выход которого соединен с силовым электроприводом.
В процессе проведения поиска по источникам научно-технической и патентной информации не было обнаружено решений, совокупность существенных признаков которых обеспечивала бы создание системы загрузки рычагов управления тренажера устойчивой в широком диапазоне характеристик моделируемых параметров.
Заявляемая система загрузки рычагов управления тренажера является новой, промышленно применимой и имеет изобретательский уровень.
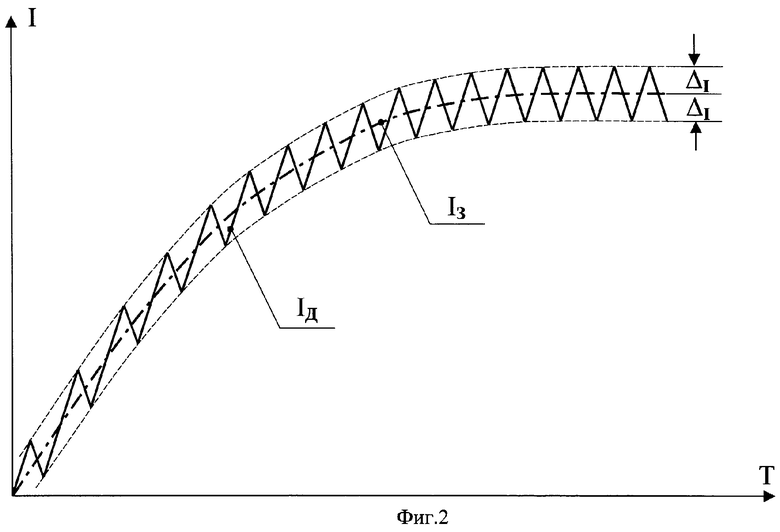
На фиг.1 представлена функциональная схема одного канала электрической системы загрузки рычагов управления тренажера; на фиг.2 - график изменения тока электродвигателя при частотно-токовом управлении.
Система загрузки рычагов управления тренажера содержит цифровой вычислитель 1, исполнительный блок 2 загрузки, содержащий управляемый источник 3 тока, разомкнутый силовой электропривод 4, соединенный жесткой механической связью 5 с рычагом 6 управления, и датчик 7 положения.
Вход цифрового вычислителя 1 соединен с датчиком 7 положения, установленным на валу электродвигателя силового привода 4, а выход - с входом управляемого источника 3 тока, выход которого соединен с обмотками управления электродвигателя силового привода 4. Вал силового привода 4 через жесткую механическую связь 5 соединен с рычагом 6 управления, а его корпус - с основанием тренажера.
Принцип действия системы загрузки заключается в моделировании усилия, с которым элементы и устройства системы управления ЛА должны действовать на рычаг управления и в преобразовании его, с помощью силового привода, в механическое усилие, передаваемое на рычаг управления и ощущаемое летчиком.
В цифровом вычислителе 1 реализуется полная математическая модель системы управления ЛА и вычисляется заданное усилие, с которым элементы и устройства системы управления должны действовать на рычаг 6 управления в зависимости от его положения и от параметров имитируемого полета. Параметры полета поступают из вычислительной системы тренажера, а положение рычага 6 управления - с датчика 7 положения, механически соединенного с рычагом 6 управления. Информация о заданном усилии с выхода цифрового вычислителя 1 поступает на вход управляемого источника 3 тока исполнительного блока 2 загрузки. Управляемый источник 3 тока, обеспечивая пропорциональную зависимость своего выходного тока от сигнала заданного усилия, формирует заданные токи, необходимые для управления силовым электроприводом 4. Силовой электропривод 4, электродвигатель которого, имея строго определенную зависимость электромагнитного момента от токов в обмотках управления, создает механическое усилие, соответствующее заданному, которое через жесткую механическую связь 5 передается на рычаг 6 управления и ощущается летчиком.
Такой способ использования разомкнутого (без обратной связи) силового электропривода 4 обеспечивает прямое управление его электромагнитным моментом, когда передаточная функция исполнительного блока загрузки в виде МД=КМ×UЗ.М определяется только свойствами электродвигателя и управляемого источника тока. Где МД - электромагнитный момент двигателя; КМ - коэффициент передачи по моменту; UЗ.М - напряжение, пропорциональное заданному моменту.
Таким образом, на тренажере обеспечивается воспроизведение реального физического процесса движения рычага управления так же, как на ЛА, где на рычаг управления воздействует с одной стороны механическая проводка с присоединенными к ней элементами и устройствами системы управления, а с другой стороны - летчик. Только вместо реальной проводки системы управления на тренажере подключается силовой электропривод, генерирующий усилия ее воздействия. На тренажере установлен реальный рычаг управления, поэтому его поведение на ЛА и на тренажере под воздействием одних и тех же сил будет абсолютно одинаково. В силу этого, отпадает необходимость моделирования динамических свойств рычага управления: инерционности, упругости и трения в его шарнирных соединениях, так как они реализуются естественным путем.
В качестве конкретной реализации прямого управления электромагнитным моментом разомкнутого электропривода может быть использован, например, частотно-токовый способ управления электродвигателем, применяемый в замкнутых системах автоматического регулирования. Управляемый источник 3 тока, в этом случае, обеспечивает формирование в обмотках управления электродвигателя силового привода 4 высокочастотного тока IД (см. фиг.2), имеющего фиксированное отклонение ΔI от заданного значения тока IЗ. А электродвигатель, в силу своей инерционности, создает электромагнитный момент, пропорциональный только низкочастотной составляющей, то есть заданному значению тока Iз.
Силовой электропривод 4 может быть построен, например, на базе серийно выпускаемых коллекторных [2, стр.5-12] или бесконтактных моментных [3, стр.3, 6-7] электродвигателей постоянного тока. В случае использования последних, управляемый источник 3 тока, кроме своих основных функций, должен дополнительно обеспечивать изменение токов в обмотках управления электродвигателя по гармоническому закону в зависимости от угла поворота вала электродвигателя.
Использование предлагаемой системы загрузки рычагов управления тренажера обеспечивает устойчивость и повышение качества воспроизведения усилий в широком диапазоне изменения градиентов загрузки при значительном упрощении конструкции системы и всего процесса моделирования в целом. Это достигается тем, что усилия на каждом рычаге управления создаются разомкнутым силовым электроприводом при прямом управлении его электромагнитным моментом с помощью управляемого источника тока.
Источники информации
1. Тыркалов В.В., Яшин Ю.П. Опыт применения электромеханической системы загрузки рычагов управления. Вторая научно-техническая конференция тренажерные технологии и обучение: новые подходы и задачи. Сборник докладов. Жуковский, Московская область. ЦАГИ, 2003, стр.56-58.
2. Кочергин В.В. Следящие системы с двигателем постоянного тока. Ленинград. Энергоатомиздат, 1988, стр.5-12.
3. Беленький Ю.М., Микеров А.Г. Выбор и программирование параметров бесконтактного моментного привода. Ленинград. Ленинградский дом научно-технической пропаганды, 1990, стр.3, 6-7.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| Устройство для обучения управлению подвижными объектами с помощью джойстиков | 2019 |
|
RU2724939C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2263352C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Способ воспроизведения условий полёта на пилотажном стенде | 2021 |
|
RU2778695C1 |
Изобретение относится к тренажеростроению, преимущественно авиационному, в частности к устройствам имитации систем управления летательного аппарата. Устройство включает вычислитель и несколько (по количеству рычагов управления) исполнительных блоков загрузки, каждый из которых содержит силовой электропривод, механически связанный с рычагом управления и снабженный датчиком положения. Каждый исполнительный блок загрузки для обеспечения прямого преобразования сигнала заданного усилия в механическое усилие на рычагах управления снабжен управляемым источником тока. При этом вход вычислителя соединен с датчиком положения, а выход - с входом управляемого источника тока, выход которого соединен с силовым электроприводом. Технический результат заключается в обеспечении устойчивости и повышения качества воспроизведения усилий на рычагах управления тренажера в широком диапазоне изменения градиентов загрузки. 2 ил.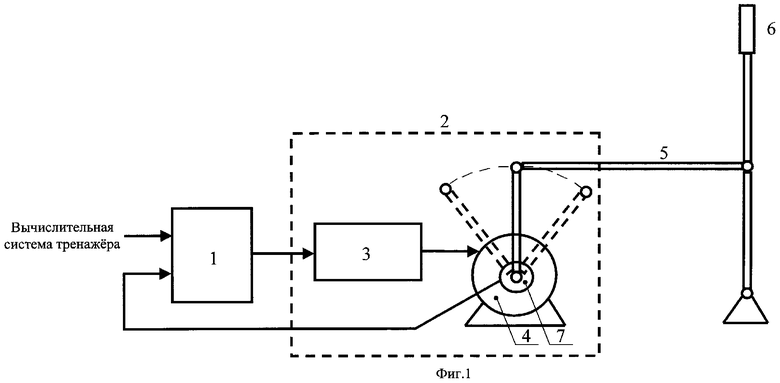
Система загрузки рычагов управления тренажера, включающая вычислитель и несколько (по количеству рычагов управления) исполнительных блоков загрузки, каждый из которых содержит силовой электропривод, механически связанный с рычагом управления и снабженный датчиком положения, отличающаяся тем, что каждый исполнительный блок загрузки для обеспечения прямого преобразования сигнала заданного усилия в механическое усилие на рычагах управления снабжен управляемым источником тока, при этом вход вычислителя соединен с датчиком положения, а выход - с входом управляемого источника тока, выход которого соединен с силовым электроприводом.
| Тыркалов В.В., Яшин Ю.П., Опыт применения электромеханической системы загрузки рычагов управления | |||
| Вторая научно-техническая конференция Тренажерные технологии и обучение: новые подходы и задачи | |||
| Сборник докладов | |||
| Жуковский, Московская область | |||
| ЦАГИ, 2003, с.56-58 | |||
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Кочергин В.В | |||
| Следящие системы с двигателем постоянного | |||

