Изобретение относится к авиационной технике, в частности к системам отображения пилотажной информации, и может быть использовано на любом современном пилотируемом летательном аппарате (ЛА) для повышения эффективности пилотирования ЛА при заходе на посадку или на стенде-тренажере для обучения летного состава и приобретения навыков посадки ЛА при произвольной окружающей обстановке.
Известны системы отображения пилотажной информации при посадке ЛА, содержащие устройство формирования пилотажной информации, вычислитель навигационных параметров и датчики высоты полета и угла крена. В известных системах устройство формирования пилотажной информации на своем экране в кабине летчика создает изображение меток и пиктограмм основных параметров движения ЛА, а также линии горизонта и осевой линии взлетно-посадочной полосы (ВПП) на основании сигналов датчиков и вычисления навигационных параметров. На этом экране могут отображаться и директорные сигналы команд управления как рассогласование некоторого контролируемого заданного параметра и его текущего значения.
Известные системы не позволяют формировать оптимальную траекторию захода на посадку по текущим параметрам движения из произвольной точки пространства, минимизирующую время выполнения маневра и загруженность летчика при отработке им позиционных команд директорного управления, направленных на приведение ЛВ в точку приземления.
Для устранения указанного недостатка предлагаемая система снабжена датчиками нормальной и боковой перегрузки, последовательно соединенными тумблером и двухпозиционным реле, последовательно соединенными первым сумматором, первый вход которого соединен с выходом датчика высоты полета, а второй инверсный вход с первым выходом вычислителя навигационных параметров по сигналу ошибки выдерживания траектории по высоте, и блоком формирования вертикальной координаты метки ориентира-цели, выход которого через первые замыкающие контакты двухпозиционного реле соединен с первым входом устройства формирования пилотажной информации, последовательно соединенными первым блоком вычисления косинуса, вход которого соединен с вторым выходом вычислителя навигационных параметров по сигналу угла между проекцией на горизонтальную плоскость прямой линии от центра тяжести ЛА к курсо-глиссадному маяку и осью ВПП, первым блоком умножения, второй вход которого соединен с третьим выходом вычислителя навигационных параметров по сигналу дальности до курсо-глиссадного маяка, и блоком формирования горизонтальной координаты метки ориентира-цели, выход которого через вторые замыкающие контакты двухпозиционного реле соединен с вторым входом устройства формирования пилотажной информации, последовательно соединенными вторым сумматором, первый вход которого соединен с выходом датчика нормальной перегрузки, вторым блоком умножения и третьим сумматором, выход которого через третьи замыкающие контакты двухпозиционного реле соединен с третьим входом устройства формирования пилотажной информации, последовательно соединенными четвертым сумматором, первый вход которого соединен с выходом датчика боковой перегрузки, и третьим блоком умножения, выход которого соединен с вторым входом третьего сумматора, последовательно соединенными четвертым блоком умножения, первый вход которого соединен с выходом второго сумматора, и пятым сумматором, выход которого через четвертые замыкающие контакты двухпозиционного реле соединен с четвертым входом устройства формирования пилотажной информации, пятым блоком умножения, первый вход которого соединен с выходом четвертого сумматора, а выход с вторым входом пятого сумматора, вторым блоком вычисления косинуса, вход которого соединен с выходом датчика угла крена, а выход с вторым инверсным входом второго сумматора и вторыми входами второго и пятого блоков умножения, блоком вычисления синуса, вход которого соединен с выходом датчика угла крена, а выход с вторым входом четвертого сумматора и вторыми входами третьего и четвертого блоков умножения.
В предлагаемой системе отображения бортовой информации обеспечивается управление ЛА при заходе на посадку за счет формирования на экране метки ориентира-цели наведения ЛА и исходящей из имеющейся на экране метки направления вектора скорости метки вектора направления заданного преследования при "охоте" за движущейся меткой-целью, причем новизна предложения заключается как в том, что осуществляется принцип "погони за целью", так и в том, что в качеcтве направления вектора заданного движения используется линия действия результирующей силы, действующей на ЛА, которая в соответствии с принципом данного управления должна быть направлена летчиком в заданную точку: на ориентир-цель. На основании анализа математического моделирования установлено, что в качестве ориентира должна быть выбрана точка в пространстве, которая, находясь на осевой линии ВПП, удалена от ее начала на расстояние, составляющее 2/3 удаления от этой же точки летящего ЛА, и превышает данную точку ВПП на величину, составляющую 2/3 от расчетной высоты полета ЛА, которая определяется как алгебраическая сумма значений текущей высоты полета, замеряемой соответствующим датчиком, и ошибки выдерживания траектории по высоте, определяемой в вычислителе навигационных параметров.
Таким образом, задача данной системы сформировать метку ориентира-цели, закоординированную вышеуказанным образом относительно изображения оси ВПП, и отобразить в виде метки-вектора направление действия на ЛА результирующей силы в данный момент времени, а задача летчика управлять ЛА таким образом, чтобы метка-вектор, преследуя метку-цель, попадала или была направлена на метку-цель. Учитывая то, что при заходах на посадку углы тангажа невелики, возможны следующие допущения: =ωzcosγ+ωysinγ;
=ωzcosγ+ωysinγ; =ωycosγ-ωzsinγ
=ωycosγ-ωzsinγ =ωx
=ωx
Координаты метки-вектора на фронтальную плоскость можно представить как проекции на эту плоскость ускорения движения ЛА:
y  (ny-cosγ)cosγ+(nz+sinγ)sin
(ny-cosγ)cosγ+(nz+sinγ)sin
z  (ny-cosγ)sinγ+(nz+sinγ)cos
(ny-cosγ)sinγ+(nz+sinγ)cos где g ускорение силы тяжести;
где g ускорение силы тяжести;
V скорость полета;
ny и nz соответственно нормальная и боковая перегрузка;
γ- угол крена.
Учитывая, что отношение g/V выполняет в этих формулах функцию масштабного коэффициента, координаты метки-вектора в данной системе вычисляются как соотношения вида
Y=[(ny-cos γ)cos γ +(nz+sin γ )sin γ
Z=[(ny-cos γ)sin γ+(nz+sin γ )cosγ (1)
На чертеже приведена предлагаемая система, где 1 датчик высоты полета, 2 первый сумматор, 3 блок формирования вертикальной координаты метки ориентира-цели, 4 устройство формирования пилотажной информации, 5 вычислитель навигационных параметров, 6 первый блок вычисления косинуса входной величины, 7 первый блок умножения, 8 блок формирования горизонтальной координаты метки ориентира-цели, 9 датчик нормальной перегрузки, 10 второй сумматор, 11 второй блок умножения, 12 датчик угла крена, 13 второй блок вычисления косинуса входной величины, 14 третий сумматор, 15 датчик боковой перегрузки, 16 четвертый сумматор, 17 блок вычисления синуса входной величины, 18 третий блок умножения, 19 четвертый блок умножения, 20 пятый сумматор, 21 пятый блок умножения, 22 тумблер в кабине летчика, 23 двухпозиционное реле.
Блоки вычисления косинуса и синуса входной величины представлены, например, в кн. 400 схем для АВМ, Тетельбаум И.М. Шнейдер Ю.Р. Энергия, 1978, с. 82, рис.2-11-8. Блоки умножения представлены на с.53, рис.2-5, той же книги. В качестве блоков формирования вертикальной и горизонтальной координат метки ориентира-цели могут использоваться усилители с коэффициентом 2/3.
Система работает следующим образом.
После того, как летчик принял решение о заходе на посадку, он переключает тумблер 22 в положение, соответствующее режиму "Посадка", и сигнал от тумблера поступает на управляющий вход реле 23, которое замыкается и вводит в действие систему. Сигнал от датчика 1 алгебраически складывается в сумматоре 2 с сигналом от первого выхода вычислителя 5, и полученное значение расчетной высоты ЛА, пропущенное через блок 3 формирования вертикальной координаты метки ориентира- цели, подается на первый вход устройства 4. Одновременно на входы блока 7 подаются сигнал с третьего выхода вычислителя 5, определяющий расстояние от ЛА до курсо-глиссадного маяка в начале ВПП, и сигнал с второго выхода вычислителя 5, который предварительно пропущен через блок 6 так, что на входе блока 7 имеется косинус угла между направлением от самолета на маяк и осью ВПП. Полученное удаление ЛА вдоль оси ВПП от ее начала подается из блока 7 через блок 8 формирования горизонтальной координаты метки ориентира-цели на второй вход устройства 4. В нем эти два сигнала, задающие координаты метки-цели, преобразуются в изображение на экране устройства 4, которое связано с началом изображения ВПП.
В то же время сигнал с датчика 9 поступает на первый вход сумматора 10, на его второй вход поступает пропущенный через блок 13 сигнал от датчика 12, а полученная алгебраическая сумма направляется на вход блока 11, где она перемножается с сигналом от блока 13, и полученное произведение направляется на первый вход сумматора 14.
Параллельно этому сигнал датчика 15 подается на первый вход сумматора 16, где он алгебраически складывается с поданным на его второй вход сигналом от датчика 12, причем этот сигнал перед входом в сумматор пропускается через блок 17. Полученная сумма перемножается в блоке 18 с сигналом, снятым с выхода блока 17, и направляется на второй вход сумматора 14. Полученная в этом сумматоре сумма направляется на третий вход устройства 4.
Вместе с тем в блоке 19 перемножаются сигналы с выходов блоков 10 и 17, в блоке 21 с выходов блоков 13 и 16, а полученные произведения алгебраически суммируются в сумматоре 20 и направляются на четвертый вход устройства 4. В последнем по сигналам, полученным на входе "три" и "четыре" этого блока, которые являются координатами вектора (1), формируется изображение вектора результирующей силы, действующей на ЛА. Это изображение на экране устройства 4 использует в качестве начала координат штатную метку ЛА, закодированную относительно оси ВПП и линии горизонта.
Летчик по возникшим на экране устройства 4 изображениям метки-цели и метки-вектора заданного направления движения начинает управление ЛА, направленное на то, чтобы добиться положения метки вектора, при котором вектор направлен на метку-цель и даже настигает эту "цель", такое пилотирование продолжается вплоть до касания ВПП.
Предлагаемая методика управления, как показало моделирование, делает манеру пилотирования очень свободной, так как в данном случае используется не позиционное рассогласование места посадки и места нахождения ЛА в координатах, связанных с осью ВПП, а направление действия результирующей силы или ускорения, т.е. вводится квадратичное опережение относительно линейного рассогласования. Данная методика не только сокращает время захода на посадку и объем действий летчика при управлении (в количестве необходимых перекладок рычагов управления при заходе на посадку из одной и той же точки в пространстве), но и делает возможным практически всеракурсный заход на посадку, что невозможно при известных алгоритмах систем бортовой индикации ЛА для захода на посадку.
Таким образом, предложенная система пилотажной информации ЛА позволяет за счет формирования подвижных изображений меток "цели наведения" и "вектора заданного направления движения" оптимизировать траектории захода на посадку и добиться почти всеракурсного захода на посадку при произвольных метеоусловиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПУТНИКОВАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2158000C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ РАЗДЕЛЬНОГО УПРАВЛЕНИЯ БОКОВЫМ И ВЕРТИКАЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ЛА | 1998 |
|
RU2141624C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
Изобретение относится к системам отображения пилотажной информации. Сущность: система содержит датчики высоты полета 1, угла крена 12, боковой перегрузки 15 и нормальной перегрузки 9, вычислитель 5 навигационных параметров, блоки формирования вертикальной 3 и горизонтальной 8 координаты метки ориентира-цели, устройство 4 формирования пилотажной информации, пять сумматоров 2, 10, 14, 16 и 20, пять блоков 7, 11, 18, 19 и 21 умножения, два блока 6 и 13 вычисления косинуса, блок 17 вычисления синуса, тумблер 22 и двухпозиционное реле 23 и позволяет оптимизировать траектории захода на посадку. 1 ил.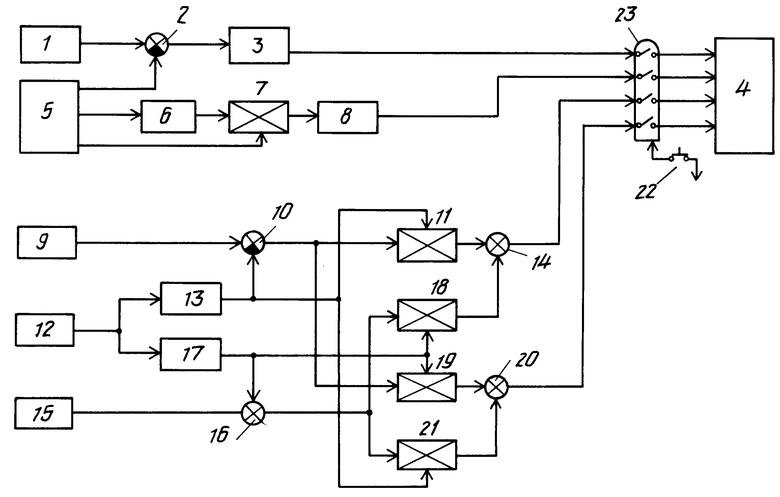
СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая устройство формирования пилотажной информации, вычислитель навигационных параметров, датчик высоты полета и датчик угла крена, отличающаяся тем, что она дополнительно снабжена датчиками нормальной и боковой перегрузки, последовательно соединенными тумблером и двухпозиционным реле, последовательно соединенными первым сумматором, первый вход которого соединен с выходом датчика высоты полета, а второй, инверсный, вход соединен с первым выходом вычислителя навигационных параметров по сигналу ошибки выдерживания траектории по высоте, и блоком формирования вертикальной координаты метки ориентира-цели, выход которого через первые замыкающие контакты двухпозиционного реле соединен с первым входом устройства формирования пилотажной информации, последовательно соединенными первым блоком вычисления косинуса, вход которого соединен с вторым выходом вычислителя навигационных параметров по сигналу угла между проекцией на горизонтальную плоскость прямой линии от центра тяжести летательного аппарата к курсоглиссадному маяку и осью взлетно-посадочной полосы, первым блоком умножения, второй вход которого соединен с третьим выходом вычислителя навигационных параметров по сигналу дальности до курсоглиссадного маяка, и блоком формирования горизонтальной координаты метки ориентира-цели, выход которого через вторые замыкающие контакты двухпозиционного реле соединен с вторым входом устройства формирования пилотажной информации, последовательно соединенными вторым сумматором, первый вход которого соединен с выходом датчика нормальной перегрузки, вторым блоком умножения и третьим сумматором, выход которого через третьи замыкающие контакты двухпозиционного реле соединен с третьим входом устройства формирования пилотажной информации, последовательно соединенными четвертым сумматором, первый вход которого соединен с выходом датчика боковой перегрузки, и третьим блоком умножения, выход которого соединен с вторым входом третьего сумматора, последовательно соединенными четвертым блоком умножения, первый вход которого соединен с выходом второго сумматора, и пятым сумматором, выход которого через четвертые замыкающие контакты двухпозиционного реле соединен с четвертым входом устройства формирования пилотажной информации, пятым блоком умножения, первый вход которого соединен с выходом четвертого сумматора, а выход с вторым входом пятого сумматора, вторым блоком вычисления косинуса, вход которого соединен с выходом датчика угла крена, а выход с вторым инверсным входом второго сумматора и вторыми входами второго и пятого блоков умножения, блоком вычисления синуса, вход которого соединен с выходом датчика угла крена, а выход с вторым входом четвертого сумматора и вторыми входами третьего и четвертого блоков умножения.
| Руководство по технической эксплуатации | |||
| Накладной висячий замок | 1922 |
|
SU331A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РЭ, ВНИИРА, Л., 1988, ч.2, с.2, рис.1, Приложение 3. | |||
