Изобретение относится к авиационной технике, а именно к способам для моделирования полета на пилотажных стендах, и может быть использован при отработке систем управления создаваемых летательных аппаратов, а также при обучении и подготовке летного состава к выполнению маневров в условиях действия больших перегрузок.
Известны способы моделирования полета летательного аппарата, проводимые экипажем непосредственно в кабине реального летательного аппарата (RU 2114460 C1, G09B 9/08, от 27.06.1998 и RU 2156501 C1, G09B 9/08, от 21.12.1999) и на пилотажном стенде (RU 2484535 C1, G09B 9/08, от 06.12.2011).
Известен способ выполнения тренировочного полета, заключающийся в том, что экипаж, находясь в кабине реального летательного аппарата и, воздействуя на органы управления летательного аппарата, совершает полет (патент RU 2114460 C1, G09B 9/08, от 27.06.1998). В случаях, когда управление командными рычагами летательного аппарата может привести к их поломке или выходу из строя агрегатов и систем летательного аппарата или запуску двигателей, экипаж использует имитаторы этих рычагов. На экранах, установленных перед членами экипажа, имитируют закабинную визуальную обстановку и отображают панели приборного оборудования. Техническая реализация данного способа выполнения тренировочного полета связана с подключением через устройство сопряжения большого количества датчиков летательного аппарата, характеризующих положения органов управления, к блоку обработки сигналов, расположенному в вычислительной машине. Это обстоятельство требует затрат большого количества времени для подготовки летательного аппарата к выполнению тренировочного полета и создает значительную нагрузку на вычислительную машину динамики движения летательного аппарата, т.к. требует преобразование сигналов с датчиков к цифровому виду. Кроме того, в данном способе не учитывается влияние на летчика рассчитанной при моделировании нормальной перегрузки.
Также известен способ выполнения тренировочного полета (патент RU 2156501 C1, G09B 9/08, от 21.12.1999), характеризующийся тем, что вычислительная машина динамики движения летательного аппарата получает информацию от датчиков на самолете непосредственно в цифровом виде после обработки сигналов с этих датчиков бортовыми вычислительными машинами. В данном способе также не учитывается влияние на летчика рассчитанной при моделировании нормальной перегрузки.
Наиболее близким по технической сущности к заявленному является способ моделирования динамики полета летательного аппарата, включающий расчет параметров движения летательного аппарата, в том числе нормальной перегрузки, в блоке математической модели, воздействие оператора на рычаги управления и передачу информации о положении этих рычагов в блок математической модели, а также отображение закабинной обстановки с помощью системы визуализации моделирующего комплекса (RU 2484535 С1, G09B 9/08, от 06.12.2011).
Отличительной особенностью предлагаемого способа является то, что в отличие от перечисленных выше, способ учитывает результат воздействия нормальной перегрузки на управляющие действия оператора командными рычагами управления.
Задачей и техническим результатом заявленного способа является повышение достоверности моделирования полета за счет создания эффекта влияния нормальной перегрузки на управляющие действия оператора, повышение эффективности наземных исследований характеристик устойчивости и управляемости за счет расширения круга задач, исследуемых на наземных пилотажных стендах, и повышение безопасности полета.
Задача и технический результат достигаются изменением оператором положения рычагов управления, передачу информации об изменении положения этих рычагов в блок-вычислитель динамики движения летательного аппарата, расчет в блоке-вычислителе параметров движения летательного аппарата, в том числе нормальной перегрузки, и визуализацию на основе этих параметров приборов и внекабинной обстановки. При этом, информацию об отклонении рычагов управления оператором, поступающую в блок-вычислитель динамики движения летательного аппарата корректируют в зависимости от рассчитанной в блоке-вычислителе динамики движения летательного аппарата перегрузки, таким образом моделируя физиологическую реакцию на перегрузки.
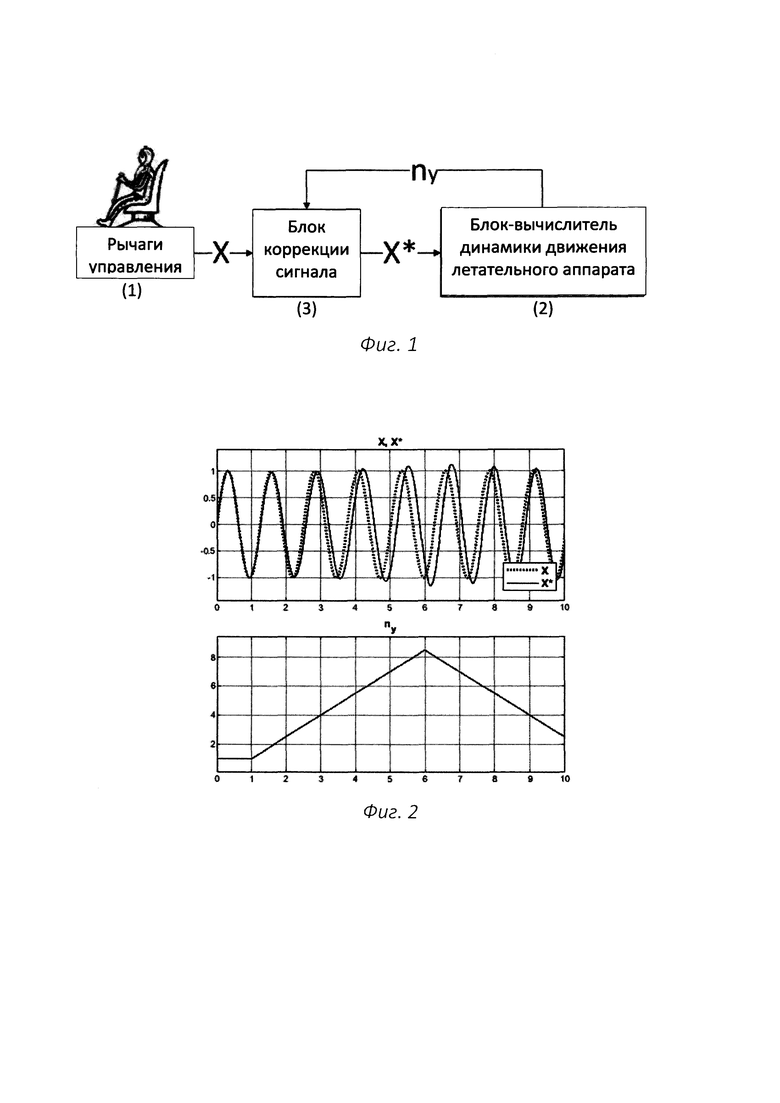
Схематично способ представлен на фиг. 1, где X - информация об отклонении рычагов управления оператором, X* - скорректированная информация об отклонении рычагов, ny - рассчитанная перегрузка.
Реализация способа осуществляется в среде моделирующего комплекса пилотажного стенда (фиг. 1) в цепи «рычаг управления (1) - блок-вычислитель динамики движения летательного аппарата (2)» посредством введения в эту цепь блока коррекции сигнала (3), который представляет собой фильтр, описывающий математическую модель действий летчика, параметры которой изменяются в зависимости, отражающей динамику изменения чистого запаздывания, логического опережения и коэффициента усиления летчика в зависимости от действующей на него перегрузки. Фильтр имеет следующий вид:

где:  - отношение выходного управляющего сигнала к входному,
- отношение выходного управляющего сигнала к входному,  - коэффициент усиления летчика,
- коэффициент усиления летчика,  - время логического опережения, р=d/dt - оператор Лапласа,
- время логического опережения, р=d/dt - оператор Лапласа,  -время чистого запаздывания, ny - рассчитанная нормальная перегрузка, действующая в данный момент, X - исходный сигнал положения рычагов управления, X* - скорректированный сигнал положения рычагов управления.
-время чистого запаздывания, ny - рассчитанная нормальная перегрузка, действующая в данный момент, X - исходный сигнал положения рычагов управления, X* - скорректированный сигнал положения рычагов управления.
Параметры  изменяются в зависимости от действующей нормальной перегрузки.
изменяются в зависимости от действующей нормальной перегрузки.
Сигнал X с рычага управления (1), отклоняемого оператором, проходит через блок коррекции (3), выходом которого является скорректированное перемещение рычага управления X*. Сигнал X* является входным сигналом для блока-вычислителя динамики движения летательного аппарата (2), в котором производится расчет текущего значения нормальной перегрузки ny.
Блок коррекции изменяет входной сигнал, когда величина перегрузки % превышает значение ny=1.0 ед.пер.. Если ny≤1.0 ед.пер., фильтр представляет собой коэффициент усиления равный 1.
Пример коррекции исходного сигнала при помощи описанного выше фильтра представлен на фиг. 2.
Таким образом, заявленное изобретение позволяет повысить реалистичность моделирования полета с большими перегрузками и, соответственно, эффективность наземных исследований устойчивости и управляемости летательных аппаратов и безопасности полета без необходимости применения дополнительного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ воспроизведения условий полёта на пилотажном стенде | 2021 |
|
RU2778695C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПСИХОФИЗИОЛОГИЧЕСКИХ ЭФФЕКТОВ В ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2369909C2 |
| Способ воспроизведения условий полета при помощи использования технологии виртуальной реальности на настольном пилотажном стенде для проведения эргономических исследований по информационно-управляющему полю пилотажной кабины | 2022 |
|
RU2793663C1 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156501C1 |
| Способ моделирования динамики полета летательного аппарата | 2024 |
|
RU2820152C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2114460C1 |
Изобретение относится к способу моделирования динамики полета летательного аппарата на пилотажном стенде. Для моделирования динамики полета при изменении оператором положения рычагов управления передают информацию об изменении положения этих рычагов в блок-вычислитель динамики движения летательного аппарата, рассчитывают в блоке-вычислителе параметры движения летательного аппарата, в том числе перегрузки, и осуществляют визуализацию на основе этих параметров приборов и внекабинной обстановки, моделируют физиологическую реакцию на перегрузки и корректируют поступающую в этот блок информацию о положении рычагов управления в зависимости от рассчитанной перегрузки в блоке-вычислителе динамики движения летательного аппарата. 2 ил.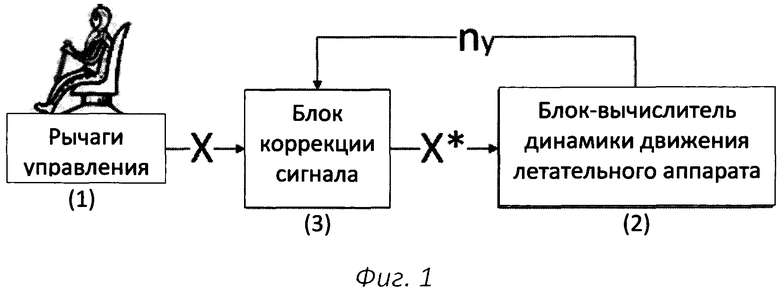
Способ моделирования динамики полета летательного аппарата на пилотажном стенде, включающий изменение оператором положения рычагов управления, передачу информации об изменении положения этих рычагов в блок-вычислитель динамики движения летательного аппарата, расчет в блоке-вычислителе параметров движения летательного аппарата, в том числе перегрузки, и визуализацию на основе этих параметров приборов и внекабинной обстановки, отличающийся тем, что в зависимости от рассчитанной в блоке-вычислителе динамики движения летательного аппарата перегрузки моделируют физиологическую реакцию на перегрузки и корректируют поступающую в этот блок информацию о положении рычагов управления.
| ПИЛОТАЖНЫЙ СТЕНД НАЗЕМНОГО КОМПЛЕКСА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ЛЕТЧИКА К ВЫПОЛНЕНИЮ ПОЛЕТОВ НА САМОЛЕТЕ-ИСТРЕБИТЕЛЕ | 2003 |
|
RU2249856C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |
| SU 1123408 А1, 27.01.1996 | |||
| RU 2058046 С1, 10.04.1996 | |||
| KR 0101416824 B1, 06.08.2014 | |||
| WO 2006135284 А1, 21.12.2006 | |||
| KR 1020110109529 А, 06.10.2011 | |||
| CN 0107358837 B, 02.10.2018. | |||

