Изобретение относится к машиностроению, преимущественно к космической технике.
При освоении твердых небесных тел может возникнуть необходимость создания герметичного соединения между объектами, размещенными на поверхности этих тел. Например для соединения жилых модулей, доставляемых раздельно с целью объединения их объемов или с целью присоединения к модулям герметичных планетоходов.
Проблемой создания такого соединения является то, что доставляемые объекты совершают посадку в различных точках поверхности. Поэтому необходимо обеспечить их доставку в одну точку, а также взаимное выравнивание и герметизацию специальных интерфейсов объектов.
Герметизация соединения происходит только при устранении зазоров между элементами конструкций предназначенных для герметизации объектов, а также при создании механической связи между ними, прочность которой достаточна для компенсации сил, возникающих при наддуве интерфейса до заданного давления.
Известен герметичный лунный ровер (Pressurized Lunar Rover), описанный в отчете NASA-CR-192033 Design of a Pressurized Lunar Rover - аналог.Герметичный лунный ровер состоит из двух герметичных кабин, соединенных с помощью подвижной герметичной оболочки, каждая из двух кабин установлена на шасси, состоящем из двух корпусных деталей, связанных с кабиной, двух размещенных на корпусной детали балансиров, подвижных относительно корпусной детали, на каждом балансире имеются две оси и два колеса, каждое из которых связано со своей осью и которые могут независимо поворачиваться относительно своих осей, колеса могут вращаться вокруг своей оси при помощи электропривода, в одной из кабин имеется герметичный интерфейс, которым Герметичный лунный ровер может присоединяться к лунному модулю с созданием герметичного соединения.
Недостатками конструкции является то, что Герметичный лунный ровер не содержит средств выравнивания герметичного интерфейса относительно соответствующего интерфейса лунного модуля, отсутствует способ герметизации стыка между Герметичным лунным ровером и лунным модулем.
Известно устройство герметичного соединения объектов после их раздельной посадки на поверхность твердых небесных тел, входящее в состав лунного электрического ровера (Lunar Electric Rover), и выбранное в качестве прототипа и описанное в статье NASA Lunar Electric Rover Concept (https://www.nasa.gov/pdf/284669main_LER_FactSheet_web.pdf). Лунный электрический ровер состоит из герметичной кабины, размещенной на шасси с рамой и шестью опорами, каждая опора состоит из двух колес, размещенных на общей поворотной оси, связанной с рамой, и способных поворачиваться вокруг этой оси, а также перемещаться вдоль нее с помощью приводов, и способных вращаться при помощи привода для перемещения лунного электрического ровера по поверхности, в герметичной кабине имеется герметичный интерфейс, которым герметичная кабина может присоединяться к лунному модулю с созданием герметичного соединения, причем имеется блок управления, который управляет приводами, а также электрическая батарея.
Недостатками прототипа является то, что расположенные в линию три пары колес с каждого борта не позволяют получить шесть степеней свободы перемещения герметичной кабины относительно шасси (и жестко закрепленного на ней интерфейса для присоединения к лунному модулю), что не позволяет компенсировать все виды рассогласований между двумя стыковочными интерфейсами (три линейных и три угловых смещения). Следовательно, с помощью этого шасси не могут быть устранены все зазоры и требуется применение подвижной герметичной оболочки между интерфейсами. Иначе при устранении зазоров возможно нагружение неподвижного (неманеврирующего вместе с шасси) интерфейса лунного модуля весом Лунного электрического ровера. Кроме того, в материалах отсутствует указание на элементы конструкции, компенсирующие силу, возникающую при наддуве совмещенных интерфейсов (крюков или замков). Это ведет к снижению надежности герметичного соединения между объектами на поверхности твердых небесных тел.
Техническим результатом предлагаемого изобретения является повышение надежности герметичного соединения между объектами на поверхности твердых небесных тел.
Технический результат достигается тем, что в устройство герметичного соединения объектов после их раздельной посадки на поверхность твердых небесных тел, содержащее герметичную кабину, герметичный интерфейс, а также раму и колеса с электроприводом, образующие шасси, имеющее три степени свободы, а также установленные на раму блок управления и электрическую батарею в отличие от известного введены не менее шести опор, причем каждая опора оснащена электроприводом изменения ее длины и датчиком длины опоры, не менее трех тарелей под установку на грунт, причем к каждой тарели через сферический шарнир прикреплены первым концом две опоры, и на втором конце каждой опоры расположен кардан опоры, не менее трех рычагов с шарниром вращения, которым каждый из них связан с рамой, а на каждом рычаге расположены два кардана опоры, причем на одной из осей одного из карданов, прикрепленных к рычагу, установлен датчик угла поворота кардана по этой оси кардана, пружины, размещенные между каждым рычагом и рамой, на каждом рычаге установлен датчик упора в грунт, а также герметичный интерфейс выполнен в виде стыковочного агрегата, на корпусе которого размещены датчики совмещения стыков, причем корпус стыковочного агрегата выполнен в виде цилиндра с двумя привалочными плоскостями, каждая из которых снабжена резиновым уплотнением, на внутренней поверхности стыковочного агрегата размещен механизм герметизации стыка с крюками, которые выполнены с возможностью поворота и линейного перемещения, стыковочное кольцо с направляющими элементами связано с корпусом стыковочного агрегата через силоизме-рительную проставку, которая выполнена с возможностью перемещения на упругих элементах, а также в состав введено прицельное устройство, связанное с герметичной кабиной, кроме того, рама и герметичная кабина связаны механическим соединением и электрическим интерфейсом.
Суть изобретения поясняется следующими схемами:
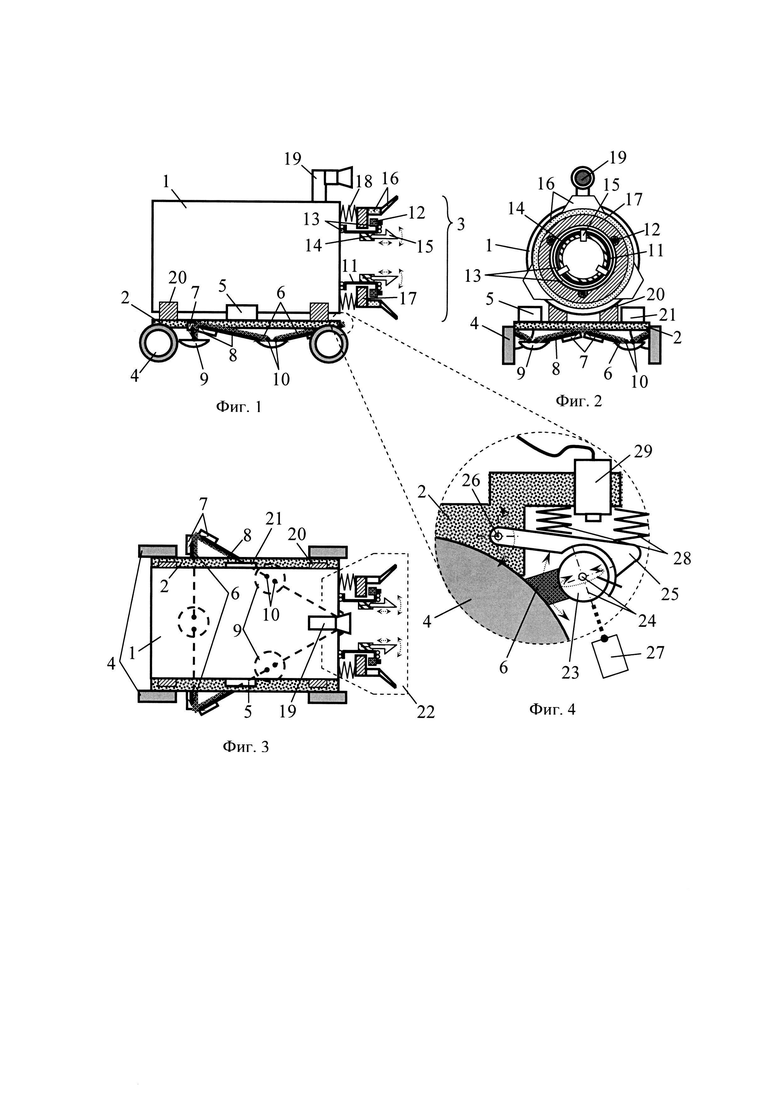
фиг. 1 - схема средства герметичного соединения объектов на поверхности твердых небесных тел (вид спереди);
фиг. 2 - схема средства герметичного соединения объектов на поверхности твердых небесных тел (вид сбоку);
фиг. 3 - схема средства герметичного соединения объектов на поверхности твердых небесных тел (вид сверху);
фиг. 4 - схема соединения опоры и рамы.
На фиг. 1 - 4 приняты следующие обозначения:
1 - герметичная кабина, 2 - рама, 3 - герметичный интерфейс, 4 - колеса с электроприводом, 5 - блок управления, 6 - опоры, 7 - электроприводы, 8 - датчики длины опоры, 9 - тарели под установку на грунт, 10 - сферический шарнир, 11 -корпус стыковочного агрегата, 12 - датчики совмещения стыков, 13 - резиновое уплотнение, 14 - механизм герметизации стыка, 15 - крюки, 16 - стыковочное кольцо с направляющими элементами, 17 - силоизмерительная проставка, 18 - упругий элемент, 19 - прицельное устройство, 20 - механическое соединение и электрический интерфейс, 21 - электрическая батарея, 22 - стыковочный агрегат, 23 -кардан опоры, 24 - оси кардана, 25 - рычаг, 26 - шарнир вращения, 27 - датчик угла поворота кардана, 28 - пружины, 29 - датчик упора в грунт.
Устройство герметичного соединения объектов после их раздельной посадки на поверхность твердых небесных тел (УГСО) содержит герметичную кабину 1, раму 2, герметичный интерфейс 3, колеса с электроприводом 4, причем колеса с электроприводом 4 образуют вместе с рамой 2 шасси с тремя степенями свободы перемещения рамы 2 по поверхности твердого небесного тела, а также установленные на раму 2 блок управления 5 и электрическую батарею 21, не менее шести опор 6, причем каждая опора 6 оснащена электроприводом 7 изменения ее длины и датчиком длины опоры 8, не менее трех тарелей под установку на грунт 9, которые могут быть установлены на грунт, причем к каждой тарели под установку на грунт 9 через сферический шарнир 10 прикреплены первым концом две опоры 6 (количество опор - четное, количество тарелей равняется количеству пар опор), и на втором конце каждой опоры 6 расположен кардан опоры 23, не менее трех рычагов 25 с шарниром вращения 26, которым каждый из них связан с рамой 2, а на каждом рычаге 25 расположены два кардана опоры 23, причем на одной из осей одного из карданов опоры 23, прикрепленных к рычагу 25, установлен датчик угла поворота кардана 27 по этой оси кардана, пружины 28, размещенные между каждым рычагом 25 и рамой 2, на каждом рычаге 25 установлен датчик упора в грунт 29, а также герметичный интерфейс 3 выполнен в виде стыковочного агрегата 22, который содержит корпус стыковочного агрегата 11 с датчиками совмещения стыков 12, причем корпус стыковочного агрегата 11 выполнен в виде цилиндра с двумя привалочными плоскостями, каждая из которых снабжена резиновым уплотнением 13, на внутренней поверхности стыковочного агрегата 22 размещен механизм герметизации стыка 14 с крюками 15, которые выполнены с возможностью поворота и линейного перемещения, а также стыковочный агрегат 22 содержит стыковочное кольцо с направляющими элементами 16, связанное с корпусом стыковочного агрегата 11 через силоизмерительную проставку 17, которая выполнена с возможностью перемещения на упругих элементах 18, а также в состав введено прицельное устройство 19, связанное с герметичной кабиной 1, кроме того, рама 2 и герметичная кабина 1 связаны механическим соединением и электрическим интерфейсом 20.
Механическое соединение и электрический интерфейс 20 могут быть выполнены в виде неразрывной связи. Механическое соединение и электрический интерфейс 20 могут быть выполнены с возможностью их соединения и разъединения, например, с помощью комбинации разрывных электроразъемов, направляющих элементов и замков с приводом. Прицельное устройство 19 может быть выполнено, например, в виде оптического визира или в виде видеорегистратора с возможностью передачи видеоизображения.
Устройство герметичного соединения объектов после их раздельной посадки на поверхность твердых небесных тел работает следующим образом.
Колеса с электроприводом 4, установленные на раме 2, в совокупности составляют шасси УГСО и обеспечивают не менее трех степеней подвижности этого шасси по поверхности твердого небесного тела. Шасси может быть выполнено по автомобильной схеме с разным числом ведущих и поворотных колес. Возможно применение подвески.
Когда опоры 6 имеют минимальную длину, УГСО передвигает по поверхности твердого небесного тела на колесном шасси. Простейшее шасси состоит из двух мостов с двумя колесами каждый. На одном мосту (заднем) устанавливается дифференциал, две связанные с ним полуоси с колесами и привод. Передний мост оснащается двумя поворотными колесами. На объекте, с которым необходимо создать герметичное соединение, размещается герметичный интерфейс и мишень для начального сближения. Под начальным сближением понимается перемещение шасси в заданную область пространства с рассогласованием осей УГСО и герметичного интерфейса объекта, с которым требуется создать герметичное соединение, не более заданного. Достижение этого состояния контролируется посредством прицельного устройства 19. Перемещение шасси осуществляется с помощью колес с электроприводом 4. Начальное сближение может выполняться как автоматически (по итогам обработки видеоизображения или с помощью других средств взаимных измерений), так и по командам оператора (с помощью визира или видеоизображения). Оператор может находиться как внутри УГСО, так и управлять им в режиме телеоператорного управления с использованием средств связи.
По завершению начального сближения УГСО переводится в режим шести-степенного начального выравнивания. Для этого длина опор 6 увеличивается с помощью электроприводов 7, причем каждая опора 6 может изменять свою длину независимо. Из-за наличия гравитации и свободного перемещения в сферических шарнирах 10 и в карданах опор 23, тарели под установку на грунт 9 двигаются сонаправлено вектору гравитации (с погрешностью обусловленной разбросом скоростей изменения длин опор 6) и укладываются на грунт. Тарели под установку на грунт 9 оснащаются грунтозацепами для снижения вероятности их перемещения по поверхности после укладки на грунт, а карданы опор 23 расположены на раме 2 таким образом, что при фиксации положения тарелей под установку на грунт 9 относительно грунта при сцеплении с ним образуется шестистепенной манипулятор, который способен перемещать шасси по шести степеням свободы. Дальнейшее удлинение опор 6 приводит к тому, что карданы опор 23 начинают давить на рычаги 25. Рычаги 25 поджаты пружинами 28, поэтому они начинают поворачиваться вокруг своих шарниров вращения 26 только после того, как опоры 6 уперлись в грунт с заданным усилием. Рычаги 25 перемещаются и нажимают на штоки датчиков упора в грунт 29. При срабатывании всех трех датчиков упора в грунт (ДУГ) 29 блок управления 5 включает электроприводы 7 опор 6 таким образом, что происходит горизонтальное выравнивание шасси. В момент, при котором сработали ДУГ 29, блок управления 5, используя показания датчиков длины опоры 8 и датчиков угла поворота кардана 27, а также геометрические параметры шасси, вычисляет координаты тарелей под установку на грунт 9 в связанной с шасси системе координат, а также все расстояния между центрами тарелей под установку на грунт 9. Эти значения контролируются на каждом такте управления. Если расстояние между тарелями под установку на грунт 9 изменяется в дальнейшем, это значит, что как минимум одна из тарелей под установку на грунт 9 потеряла сцепление с грунтом. При этом производится аварийный останов и выдается сообщение об ошибке. В штатной ситуации блок управления включает электроприводы 7 опор 6 таким образом, что шасси перемещается на заданное расстояние в сторону, противоположную вектору гравитации. Переход к режиму шестистепенного начального выравнивания на этом завершен.
Далее в режиме шестистепенного начального выравнивания при помощи прицельного устройства 19 герметичный интерфейс 3 переводится в заданную область пространства по трем направлениям и с рассогласованием осей систем координат не более заданного. Системы координат расположены в центре герметичных интерфейсов так, что одна из осей совпадает с осью герметичного интерфейса, вторая направлена в сторону верха объектов, а третья дополняет ортогональную систему координат. Для удобства управления используется система координат, связанная с герметичным интерфейсом 3. Контролируя положение мишени, расположенной на объекте, с которым должно быть создано герметичное соединение, относительно линии визирования оператор выдает команды блоку управления 5 на смещение и поворот шасси в заданном направлении (по одной или нескольким степеням свободы сразу). Блок управления 5 содержит программу, которая по заданному направлению вычисляет изменения длин опор 6, при котором управляющее воздействие будет корректно отработано и выдает команды на электроприводы 7. Режим также может выполняться автоматически при наличии средств, способных определить по видеоизображению нужное направление смещения герметичного интерфейса 3 для его перемещения в заданную область пространства. Размер указанной области согласуется с геометрическими параметрами стыковочного кольца с направляющими элементами 16, а также рабочим пространством манипулятора, образованного рамой 2, опорами 6 и тарелями под установку на грунт 9. Подвижности манипулятора должно быть достаточно для того, чтобы совместить герметичные интерфейсы и выбрать зазор между ними, причем проекция центра масс объекта на поверхность (в направлении вектора гравитации) не должна при этом выйти за пределы области, в которой гарантируется отсутствие опрокидывания УГСО.
Далее следующим образом выполняется режим автоматической стыковки. Блок управления 5 запускает программу, которая имитирует траекторию движения свободного движущегося тела под действием внешних сил и моментов. Это математическое тело связано с герметичной кабиной 1 и имеет следующую специфику: масса и тензоры инерции выбираются экспертно (на более позднем этапе разработки), центр масс размещается на заданном расстоянии от привалочной плоскости корпуса стыковочного агрегата 22 на его оси в направлении герметичного интерфейса объекта, с которым требуется создать герметичное соединение. Перед началом движения вычисляется вектор из центра стыковочного агрегата 22 в направлении математического центра масс. Вдоль этого вектора прикладывается математическая сила дожатая заданной величины. Величина этой силы дожатая зависит от текущей скорости и выбирается такой, чтобы не была превышена заданная максимальная скорость движения центра масс. Для этой силы дожатия рассчитывается вектор перемещения тела (и герметичной кабины 1) на следующем шаге управления. Причем не требуется строго в реальном времени имитировать движение свободного тела, достаточно гарантировать, что на каждом шаге управления герметичные интерфейсы объектов будут сближаться. Также возможно перемещение по шагам (с паузой между тактами управления). Это перемещение отрабатывается шасси с использованием соответствующей подпрограммы блока управления 5. Стыковочное кольцо с направляющими элементами 16 расположено так, что оно первым начинает взаимодействовать с герметичным интерфейсом объекта, с которым требуется создать герметичное соединение. Силоизмерительная проставка 17 измеряет силы и моменты интерфейсного взаимодействия стыковочного кольца с герметичным интерфейсом. Она может быть выполнена в виде двух колец, соединенных не менее, чем шестью тензодатчиками, прикрепленными к кольцам посредством вращательных шарниров, см. например, по схеме, указанной в статью "Six component force-torque sensors using Gough-Stewart platform manipulators" (https://mecheng.iisc.ac.in/~asitava/nae.pdf). Эти силы и моменты также начинают действовать на математическое тело, оказывая влияние на его траекторию. Форма направляющих элементов выбирается таким образом, что при взаимодействии их с герметичным интерфейсом возникают такие силы и моменты, которые влияют на траекторию математического тела (и герметичной кабины 1) так, что на каждом шаге управления уменьшается зазор между привалочной плоскостью корпуса стыковочного агрегата 11 и соответствующего элемента герметичного интерфейса объекта. Зазор между интерфейсами уменьшается до тех пор, пока не срабатывают датчики совмещения стыков 12. Срабатывание этих датчиков гарантирует то, что элемент герметичного интерфейса объекта, с которым должно быть создано герметичное соединение, находится в области, в которой возможен его захват крюками 15 механизма герметизации стыка (МТС) 14. Крюки 15 поворачиваются вокруг своей оси, входя в зацепление с указанным элементом, а потом перемещаются линейно, прижимая его к привалочной плоскости. При этом стыковочное кольцо с направляющими элементами 16 поджимается и отводится за счет упругого элемента 18. Механизм герметизации стыка 14 начинает работать при выполнении двух условий: датчики совмещения стыков 12 обжаты, модуль векторной суммы силы дожатая и силы, измеренной силоизмери-тельной проставкой 17 должен быть меньше заданного значения. При выполнении последнего условия кинематическая цепь, состоящая из шасси, герметичной кабины 1 и стыковочного агрегата 22 нагружается и деформируется. Величины этой деформации достаточно для того, чтобы при работе МТС 14 и устранении оставшегося зазора не возникло ситуации, в которой вес УГСО будет компенсироваться в основном не силой реакции тарелей о грунт, а силой реакции герметичного интерфейса 3 (гарантируется, что УГСО не будет «висеть» на объекте, с которым должно быть создано герметичное соединение). После срабатывания МТС 14 режим автоматической стыковки завершается. Далее возможен наддув герметичного соединения и создание переходного тоннеля.
Контроль состояния грунта под тарелями под установку на грунт 9 в состыкованном состоянии УГСО осуществляется ДУГ 29. При его срабатывании оператору выдается сообщение. Данная ситуация должна быть им рассмотрена с учетом алгоритмов действий по парированию нештатных ситуаций.
Расстыковка производится следующим образом. УГСО и объект переводятся в состояние, при котором возможна разгерметизация герметичного соединения. Затем крюки 15 перемещаются МГС 14 линейно, высвобождая герметичный интерфейс 3, а затем поворачиваются, выходя из зацепления с ним. Блок управления 5 последовательно выполняет следующие операции: перемещает на заданное расстояние герметичную кабину 1 по оси стыковочного агрегата 22 в направлении от герметичного интерфейса 3 объекта, от которого выполняется отстыковка, перемещает герметичную кабину 1 в направлении действия сил гравитации до тех пор, пока не пропадет сигнал обжатия хотя бы одного ДУГ 29, уменьшает длины опор 6 до минимальных. При этом происходит плавная установка УГСО на колеса с электроприводом 4. Участие оператора при этом не требуется.
Имеется возможность отдельного использования шасси УГСО, например, для строительства многомодульных герметичных объектов. Для этого между герметичной кабиной 1 и рамой 2 шасси устраиваются разъединяемые автоматически или вручную механическое соединение и электрический интерфейс 20. После стыковки УГСО герметичная кабина 1 автономно фиксируется относительно поверхности твердого тела, затем выполняются следующие действия: механическое соединение и электрический интерфейс 20 разъединяются, блок управления 5 перемещает герметичную кабину 1 в направлении действия сил гравитации до тех пор, пока не пропадет сигнал обжатия хотя бы одного ДУГ 29, а затем уменьшает длины опор 6 до минимальных для плавной установки УГСО на колеса с электроприводом 4 и перевода опор 6 в транспортное положение. После этого шасси может быть перемещено в место, в котором на него будет установлена очередная герметичная кабина 1.
Устройство герметичного соединения объектов после их раздельной посадки на поверхность твердых небесных тел может быть применено при освоении Луны или других твердых небесных тел.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ВОДЫ НА ЛУНЕ | 2021 |
|
RU2770385C1 |
| Инженерная луномашина и способ её эксплуатации | 2021 |
|
RU2770387C1 |
| АЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2436715C2 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| МНОГОРАЗОВАЯ КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ОДНОСТОРОННЕЙ ДОСТАВКИ ГРУЗОВ И МАССОВОЙ ДОСТАВКИ ТУРИСТОВ С ОКОЛОЛУННОЙ ОРБИТЫ НА ПОВЕРХНОСТЬ ЛУНЫ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2020 |
|
RU2744844C1 |
| Мобильный модуль поддержки внекабинной деятельности космонавтов на поверхности Луны и способ его эксплуатации | 2021 |
|
RU2770328C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ТУРИСТОВ С ОКОЛОЛУННОЙ ОРБИТЫ НА ПОВЕРХНОСТЬ ЛУНЫ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2019 |
|
RU2730700C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| МНОГОРАЗОВАЯ КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ МАССОВОЙ ДОСТАВКИ С ОКОЛОЗЕМНОЙ ОРБИТЫ НА ОКОЛОЛУННУЮ ОРБИТУ ТУРИСТОВ ИЛИ ПОЛЕЗНЫХ ГРУЗОВ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2019 |
|
RU2736657C1 |
| Космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем | 2020 |
|
RU2758656C1 |
Изобретение относится преимущественно к средствам внекорабельной деятельности на поверхности небесных тел. Предлагаемое устройство герметичного соединения (УГС) содержит герметичную кабину (1), раму (2) с интерфейсом (3), электроприводные колеса (4), опоры (6) с электроприводами (7), датчиками длины (8) и тарелями (9) установки на грунт со сферическими шарнирами (10). Опоры (6) имеют карданы с датчиками угла поворота и подпружиненные рычаги, взаимодействующие с датчиками упора в грунт (не показаны). Интерфейс (3) включает корпус (11) стыковочного агрегата, датчики совмещения (12) и механизм герметизации (14) стыков, резиновое уплотнение (13), крюки (15), стыковочное кольцо (16) с направляющими и иные элементы. На кабине (1) установлено прицельное устройство (19). После начального сближения со вторым УГС, выдвижения и фиксации тарелей (9) на грунте, опоры (6) образуют манипулятор, способный перемещать шасси по шести степеням свободы и тем самым обеспечить окончательную стыковку обоих УГС. Техническим результатом является повышение надежности герметичного соединения между УГС на поверхности небесных тел. 4 ил.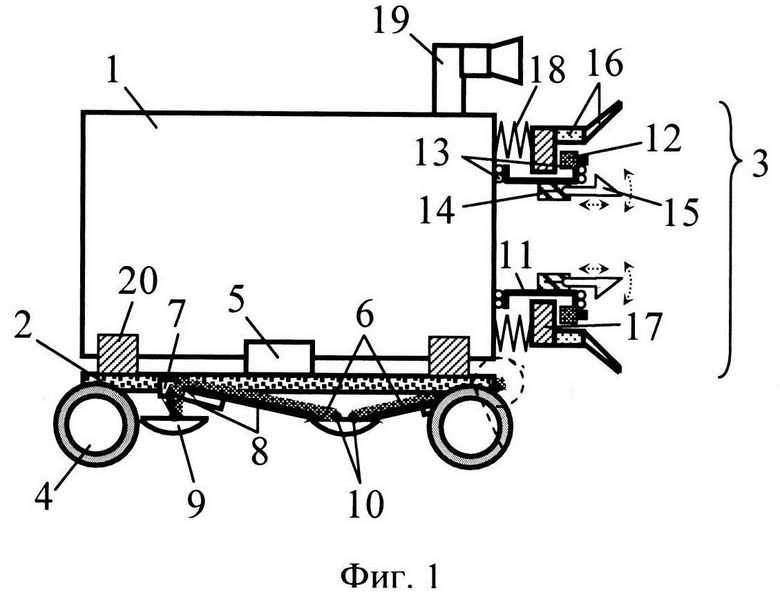
Устройство герметичного соединения объектов после их раздельной посадки на поверхность твердых небесных тел, содержащее герметичную кабину, герметичный интерфейс, а также раму и колеса с электроприводом, образующие шасси, имеющее три степени свободы, а также установленные на раму блок управления и электрическую батарею, отличающееся тем, что в него введены не менее шести опор, причем каждая опора оснащена электроприводом изменения ее длины и датчиком длины опоры, не менее трех тарелей под установку на грунт, причем к каждой тарели через сферический шарнир прикреплены первым концом две опоры, и на втором конце каждой опоры расположен кардан опоры, не менее трех рычагов с шарниром вращения, которым каждый из них связан с рамой, а на каждом рычаге расположены два кардана опоры, причем на одной из осей одного из карданов, прикрепленных к рычагу, установлен датчик угла поворота кардана по этой оси кардана, пружины, размещенные между каждым рычагом и рамой, на каждом рычаге установлен датчик упора в грунт, при этом герметичный интерфейс выполнен в виде стыковочного агрегата, на корпусе которого размещены датчики совмещения стыков, а корпус стыковочного агрегата выполнен в виде цилиндра с двумя привалочными плоскостями, каждая из которых снабжена резиновым уплотнением, на внутренней поверхности стыковочного агрегата размещен механизм герметизации стыка с крюками, которые выполнены с возможностью поворота и линейного перемещения, при этом стыковочный агрегат содержит стыковочное кольцо с направляющими элементами, связанное с корпусом стыковочного агрегата через силоизмерительную проставку, которая выполнена с возможностью перемещения на упругих элементах, в состав устройства герметичного соединения объектов также введено прицельное устройство, связанное с герметичной кабиной, кроме того, рама и герметичная кабина связаны механическим соединением и электрическим интерфейсом.
| NASA | |||
| Lunar Electric Rover Concept Characteristics | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Система обеспечения внекабинной деятельности космонавтов-операторов и способ её эксплуатации | 2020 |
|
RU2739648C1 |
| US 10960993 B2, 30.03.2021 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ РАЗМЕЩЕНИЯ МОБИЛЬНЫХ МОДУЛЬНЫХ ЗАВОДОВ | 1999 |
|
RU2161101C1 |
| US 7434355 B2, 14.10.2008. | |||

