Изобретение относится к радиотехнике, а конкретно к средствам фазовой автоподстройки частоты генераторов, формирующих на своем выходе гармонический (синусоидальный) сигнал.
Изобретение имеет отношение к устройствам стабилизации частоты подстраиваемых генераторов, выполненных на основе кварцевых генераторов и использующих в качестве опорных сигналов выходные сигналы квантовых стандартов частоты.
Вопросы повышения стабильности частоты гармонических сигналов чрезвычайно важны при разработке радиотехнических устройств и комплексов и постоянно привлекает внимание исследователей, см., например, работы: [1] - Фалькович С.Е., Хомяков Э.Н. / Статистическая теория измерительных радиосистем // М., Радио и связь, 1981, с. 203-226; [2] - Одуан К., Гино Б. / Измерение времени. Основы GPS // Москва, Техносфера, 2002, с. 84-125.
Классической схемой стабилизации частоты подстраиваемого генератора является одноконтурная схема с фазовой автоподстройкой частоты, содержащая замкнутые в кольцо фазовой автоподстройки частоты подстраиваемый генератор, фазовый детектор и фильтрующий блок, выполненный, например, на основе фильтра нижних частот, выход которого соединен с входом управления подстраиваемого генератора, при этом второй (опорный) вход фазового детектора связан с выходом опорного генератора, см., например, работу [3] - Шахгильдян В.В., Ляховский А.А. / Системы фазовой автоподстройки частоты // М., Связь, 1972, с. 183-239. Фазовый детектор формирует сигнал ошибки (сигнал рассогласования), характеризующий разницу фаз сигналов подстраиваемого и опорного генераторов. Этот сигнал проходит через фильтрующий блок и поступает в качестве управляющего сигнала на вход управления подстраиваемого генератора, подстраивая его частоту под частоту сигнала опорного генератора.
В таких устройствах при их практическом осуществлении существуют проблемы стабилизации частоты выходного сигнала подстраиваемого генератора в условиях кратковременного пропадания опорного сигнала или возникновения в нем частотных флуктуации различного рода.
Задача сохранения параметров выходного сигнала подстраиваемого генератора в условиях кратковременного пропадания опорного сигнала решается, например, за счет использования в фильтрующих блоках интегрирующих элементов, которые фиксируют управляющий сигнал в текущем состоянии на время пропадания опорного сигнала, как это предлагается, например, в авторском свидетельстве СССР [4] - SU 1298913 (А1), H03L 7/00, 23.03.1987, а также в патенте США [5] - US 6784706 (В2), H03L 7/06, 31.08.2004.
Задача сохранения параметров выходного сигнала подстраиваемого генератора в условиях фазовых скачков в опорном сигнале, в определенной мере может решаться, например, путем компенсации их влияния на выходной сигнал фазового детектора. Например, в патенте США [6] - US 5426672, H04L 7/00, 20.06.1995 для компенсации эффекта фазовых скачков, возникающих в опорном сигнале, предложено корректировать выходной сигнал фазового детектора, добавляя к нему определенным образом сформированный компенсирующий сигнал-добавку. При этом для выявления фазового скачка в таком устройстве используется информационная составляющая, присутствующая в опорном сигнале. В силу специфики используемых информационных модулированных сигналов такое устройство имеет ограниченную область применения.
Аналогичный принцип компенсации эффекта фазовых скачков опорного сигнала путем коррекции выходного сигнала фазового детектора реализован в устройстве стабилизации частоты подстраиваемого генератора, представленном в патенте РФ [7] - RU 2321167 (С2), H04L 7/093, 27.03.2008, принятом в качестве прототипа.
Устройство-прототип содержит замкнутые в кольцо автоподстройки частоты подстраиваемый генератор, фазовый детектор, компенсатор фазового скачка, фильтр нижних частот, интегратор и цифроаналоговый преобразователь, выход которого соединен с входом управления подстраиваемого генератора, при этом второй вход фазового детектора соединен с выходом опорного генератора. В варианте исполнения, когда номинальное значение частоты подстраиваемого генератора превышает значение опорной частоты, между выходом подстраиваемого генератора и входом фазового детектора вводится соответствующий делитель частоты.
Фазовый детектор осуществляет определение разности фаз выходных сигналов подстраиваемого генератора и опорного генератора, формируя фазоразностный сигнал.
Подстраиваемый генератор формирует на своем выходе сигнал, частота которого определяется значением управляющего сигнала, поступающего с выхода цифроаналогового преобразователя.
Если частота подстраиваемого генератора самопроизвольно варьируется, например, из-за изменения температуры окружающей среды, то стабилизация ее осуществляется под воздействием управляющего сигнала, сформированного только на основе фазоразностного сигнала без участия компенсатора фазового скачка.
Если в выходном сигнале опорного генератора присутствуют кратковременные скачки фазы, то они выявляются и компенсируются в компенсаторе фазового скачка. Компенсатор фазового скачка осуществляет определение момента фазового скачка и производит оценку значения данного скачка. Определение момента фазового скачка осуществляется путем порогового сравнения текущего изменения фазоразностного сигнала с соответствующим локальным средним изменением приращения фазоразностного сигнала. Оценка значения скачка осуществляется выбором значения, равного разности приращения фазоразностного сигнала в момент определения скачка и двух возможных локальных средних приращений фазоразностного сигнала (положительного или отрицательного) в этот момент. Наиболее близкое значение к разности между локальными средними значениями фазоразностного сигнала до и после скачка считается верным и используется при формировании выходного сигнала компенсатора фазового скачка, который является входным сигналом цепи из последовательно соединенных фильтра нижних частот, интегратора и цифроаналогового преобразователя, осуществляющих формирование управляющего сигнала для подстраиваемого генератора с учетом скомпенсированного фазового скачка, выявленного в опорном сигнале.
Таким образом, устройство-прототип в определенной степени обеспечивает решение задачи стабилизации частоты подстраиваемого генератора относительно частоты выходного сигнала опорного генератора в условиях кратковременных скачков его фазы.
Однако для ряда применений, где требуется повышенная надежность и точность формирования выходного сигнала подстраиваемого генератора в условиях возникновения в опорном сигнале частотных флуктуаций различного рода, компенсации фазовых скачков, осуществляемые в прототипе, могут оказаться неэффективными.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является создание устройства стабилизации частоты подстраиваемого генератора, характеризующееся повышенной надежностью и точностью формирования выходного сигнала подстраиваемого генератора в условиях возникновения в опорном сигнале частотных флуктуаций различного рода.
Сущность заявляемого изобретения заключается в следующем. Устройство стабилизации частоты подстраиваемого генератора содержит подстраиваемый генератор, опорной генератор и фазовый детектор. В отличие от прототипа в устройство введены блок обработки сигнала управления и два аналого-цифровых преобразователя (АЦП). Вход управления подстраиваемого генератора соединен с выходом блока обработки сигнала управления, входы которого соединены с выходами фазового детектора, а выход подстраиваемого генератора и выход опорного генератора через первый и второй АЦП связаны с соответствующими входами фазового детектора. Фазовый детектор содержит первый и второй фильтры Гильберта, входы которых образуют, соответственно, первый и второй входы фазового детектора, соединенные с выходами указанных АЦП, первый и второй блоки расчета фазы, входы которых соединены с выходами соответствующих фильтров Гильберта, вычитатель, первый и второй входы которого соединены соответственно с выходами первого и второго блоков расчета фазы, а также блок расчета характеристик разностного сигнала, вход которого соединен с выходом вычитателя, а выходы образуют входы блока децимирующих фильтров. Выходы блока децимирующих фильтров образуют выходы фазового детектора, соединенные с соответствующими входами блока обработки сигнала управления.
Достижение технического результата обеспечивается введением блока обработки сигнала управления, который включает в себя систему анализа полученной разности фаз и блок формирования сигнала управления. В системе анализа содержится модель нейро-нечеткой сети, входами которой являются амплитуда, фаза и частота разностного сигнала. Особенность такой системы состоит в обучении нейро-нечеткой сети реальными данными, отображающими как стабильное состояние генераторов, так и возможные отклонения. Модель сети устроена таким образом, что после обучения она не только выявляет скачок, но и парирует его, выдавая на выход код чистого сигнала. Блок формирования сигнала управления преобразовывает полученные данные с выхода нейро-нечеткой сети в требуемый формат.
Сущность изобретения и его осуществимость поясняются иллюстративными материалами, представленными на фиг. 1-8, где:
на фиг. 1 представлена структурная схема заявляемого устройства;
на фиг. 2 - структурная схема фазового детектора;
на фиг. 3 - структурная схема блока обработки сигнала управления
на фиг. 4 - блок-схема нейро-нечеткой сети;
на фиг. 5 - блок-схема алгоритма обучения сети;
на фиг. 6 - графики обучающих данных;
на фиг. 7 - графики данных для тестирования;
на фиг. 8 - результаты тренировки нейро-нечеткой сети;
на фиг. 9 - сгенерированная сеть и результаты тестирования.
Заявляемое устройство стабилизации частоты подстраиваемого генератора содержит, см. фиг. 1, опорный генератор 1 и подстраиваемый генератор 2, выходы которых через первый 3 и второй 4 АЦП связаны, соответственно, с первым и вторым входами фазового детектора 5, выходы которого соединены с входами блока 6 обработки сигнала управления, выход которого соединен с управляющим входом подстраиваемого генератора 2.
Подстраиваемый генератор 2 в рассматриваемом примере представляет собой кварцевый генератор, а опорный генератор - квантовый генератор 1 (квантовый стандарт частоты).
Фазовый детектор 5 (фиг. 2) содержит первый 7 и второй 8 фильтры Гильберта, входы которых образуют, соответственно, первый и второй входы фазового детектора 5, соединенные с выходами АЦП 3 и 4, а выходы соединены, соответственно, с входами первого 9 и второго 10 блоков расчета фазы, а также вычитатель 11, первый и второй входы которого соединены соответственно с выходами первого 9 и второго 10 блоков расчета фазы, а выход соединен с входом блока 12 расчета характеристик разностного сигнала (фазы, амплитуды и частоты), выходные сигналы которого поступают на вход блока 13 децимирующих фильтров, а выходы блока 13 децимирующих фильтров образуют выходы фазового детектора 5.
Блок 6 обработки сигнала управления, на вход которого поступают значения фазы, амплитуды и частоты содержит электронно-вычислительные средства, например микропроцессор с записанной в нем программой, выполняющей обработку значений и формирование управляющего сигнала для опорного генератора 2. Блок 6 (фиг. 3) состоит из последовательно соединенных алгоритма нейро-нечеткой сети 14 и формирователя управляющего сигнала 15.
Работа заявляемого устройства происходит следующим образом.
Подстраиваемый генератор 2 формирует гармонический сигнал, частота которого определяется управляющим сигналом, поступающим на его вход управления с выхода блока 6 обработки сигнала управления. Под действием управляющего сигнала частота выходного сигнала подстраиваемого генератора 2 стабилизируется относительно частоты выходного сигнала опорного генератора 1.
Выходные гармонические сигналы с выходов генераторов 1, 2 поступают на входы АЦП 3,4.
С выходов АЦП 3, 4 оцифрованные сигналы поступают на первый и второй входы фазового детектора 5.
В фазовом детекторе 5 эти сигналы проходят через фильтры Гильберта 7 и 8, осуществляющие представление сигналов в аналитическом виде, т.е. в виде мнимой и вещественной составляющих.
С выходов фильтров Гильберта 7 и 8 сигналы поступают на входы блоков 9 и 10 расчета фазы, а после получения значений фаз, сигналы поступают на входы вычитателя 11.
Вычитатель 11 осуществляет вычитание сигналов, характеризующих фазы сигналов подстраиваемого генератора 2 и опорного генератора 1.
Полученный разностный сигнал поступает на вход блока 12 расчета характеристик разностного сигнала, с выходов которого значения амплитуды, фазы и частоты поступают на вход 13 блока децимирующих фильтров, осуществляющих уменьшение частоты дискретизации обрабатываемого сигнала. Выходными сигналами блока являются характеристики разностного сигнала (амплитуда, частота и фаза), которые поступают на вход блока 6 обработки сигнала управления.
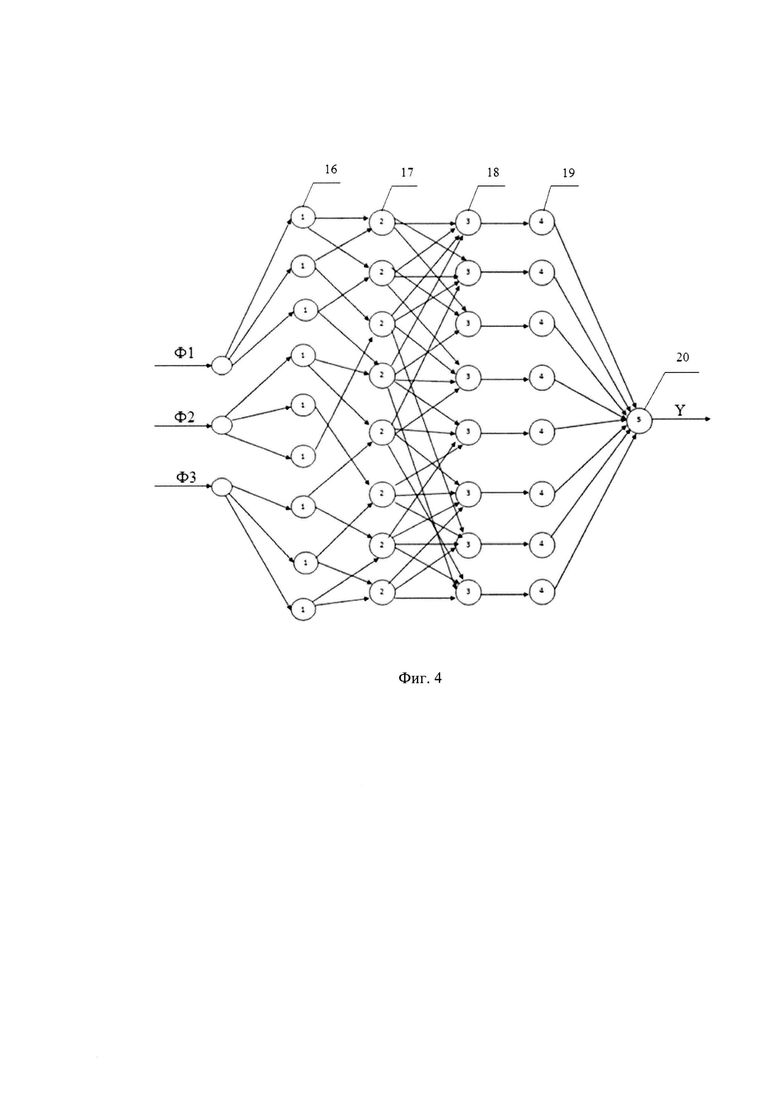
Формирование управляющего сигнала подстраиваемого генератора 2 в блоке 6 обработки сигнала управления осуществляется с помощью нейро-нечеткой сети, структурная схема которой представлена на фиг. 4.
Формирование управляющего сигнала для подстраиваемого генератора 2 в блоке 6 обработки сигнала управления осуществляется в соответствии с алгоритмом обработки, блок-схема которого представлена на фиг. 5. Сущность алгоритма заключается в следующем.
Полученные в фазовом детекторе 5 характеристики разностного сигнала представляют собой случайные величины А, Н, F (фиг. 4), которые подвержены действию многих факторов (ошибка измерителя, тренд заданного уровня, постоянные смещения), что позволяет применить в качестве их оценки нейро-нечеткую сеть.
Алгоритм нейро-нечеткой сети (фиг. 5) объединяет в себе достоинства нейронных сетей и классических нечетких систем. В отличие от нейронных сетей, нейро-нечеткие сети характеризуются четким представлением знаний, содержащихся в нечетких правилах. Наличие нечеткой составляющей позволяет осуществлять планирование и прогнозирование, опирающееся на неполную информацию. Также нейро-нечеткие сети можно обучать с помощью метода обратного распространения ошибки (основа обучения нейронных сетей) и эволюционных алгоритмов.
Нейро-нечеткая сеть блока 6 обработки сигнала управления представляет собой ANFIS-сеть, состоящую из пяти слоев, назначение которых следующее:
• Первый слой 16 - термы входных переменных;
• Второй слой 17 - антецеденты (посылки);
• Третий слой 18 - нормализация степеней выполнения правил;
• Четвертый слой 19 - заключение правил;
• Пятый слой 20 - агрегирование результата, полученного по различным правилам.
Графическое изображение структуры сети представлено на фиг. 4. Входными сигналами являются значения разностной фазы и амплитуды сигнала. Узлы первого слоя 16 представляют собой колоколообразные функции принадлежности [8]:

где a, b и с - настраиваемые параметры функции принадлежности, Xi - значения входных данных.
В блоке 6 обработки сигнала управления модель нейро-нечеткой сети имеет три входа, на которые с измерителя поступают следующие данные сигнала:
1. Частота
2. Фаза
3. Амплитуда.
Каждый вход соединен только со своим термами. Терм-множество входа «Амплитуда» выглядит следующим образом:

где A1, А2, A3 - термы, характеризующие амплитуду в соотношении: A1<А2<A3. Функции принадлежности термов входа «Амплитуда»:



Значения параметров a, b и с выбраны с учетом зависимости амплитуды синусоидального сигнала от температуры стандарта частоты.
Терм-множество входа «Частота» выглядит следующим образом:
Н={Н1,Н2,Н3},
где H1, Н2, Н3 - термы, характеризующие частоту в соотношении: H1<H2<H3.
Функции принадлежности термов входа «Частота»:



Значения параметров a, b и с выбраны с учетом зависимости частоты синусоидального сигнала от температуры стандарта частоты.
Терм-множество входа «Фаза» выглядит следующим образом:

где F1, F2, F3 -термы, характеризующие фазу в соотношении: F1<F2<F3. Функции принадлежности термов входа «Фаза»:



Значения параметров a, b и с выбраны с учетом зависимости фазы синусоидального сигнала от температуры стандарта частоты.
Второй слой 17 - это слой m-нейронов, которые на выходе моделируют логическую связку произведением  . Узел второго слоя соединен с теми узлами первого слоя, которые формируют антецеденты соответствующего. Каждый узел второго слоя может принимать от 1 допсигналов первого слоя. Обозначим выходы узлов этого слоя через
. Узел второго слоя соединен с теми узлами первого слоя, которые формируют антецеденты соответствующего. Каждый узел второго слоя может принимать от 1 допсигналов первого слоя. Обозначим выходы узлов этого слоя через  . Функция узла заключается в отображении степени выполнения правила, которая рассчитывается как произведение входных сигналов.
. Функция узла заключается в отображении степени выполнения правила, которая рассчитывается как произведение входных сигналов.
В третьем слое 18 каждый узел рассчитывает относительную степень выполнения нечеткого правила по формуле:

где  - узел третьего слоя, τr - узел второго слоя.
- узел третьего слоя, τr - узел второго слоя.
В четвертом слое 19 каждый узел соединен с одним узлом третьего слоя, а также со всеми входами сети (на фиг.4 связи со входами не показаны). Узел четвертого слоя рассчитывает вклад одного нечеткого правила в выход сети по формуле:

где Vr - узел четвертого слоя; А, Ф - входы сети,  - узел третьего слоя, b0,r -коэффициент связи.
- узел третьего слоя, b0,r -коэффициент связи.
Единственный узел пятого слоя 20 суммирует вклады всех правил:

Выходной сигнал пятого слоя 20 является результатом оценки входных характеристик разностей. Его значения используется для формирования управляющего сигнала кварцевого генератора в блоке 6 (фиг. 3).
Для обучения нейро-нечеткой сети применяется комбинация градиентного спуска в виде алгоритма обратного распространения ошибки и метода наименьших квадратов. Алгоритм обратного распространения ошибки фиг. 5 настраивает параметры антецедентов правил, т.е. функций принадлежности. Он включает в себя стадии:
• подача на входы сети обучающих данных (блок 21, фиг. 5);
• прямое распространение сигнала по всем слоям сети (блок 22, фиг. 5);
• расчет ошибки и оценка коэффициентов с помощью МНК (блок 23, фиг. 5);
• получение результата в виде обученной сети (блок 24, фиг. 5);
• корректировка весов (блок 25, фиг. 5);
• обратное распространение сигнала по всем слоям сети (блок 26, фиг. 5).
Обучение алгоритмом обратного распространения ошибки предполагает два прохода по всем слоям сети: прямого и обратного. При прямом проходе входной вектор подается на входной слой нейронной сети, после чего распространяется по сети от слоя к слою. В результате генерируется набор выходных сигналов, который и является фактической реакцией сети на данный входной образ. Во время прямого прохода все синаптические веса сети фиксированы. Во время обратного прохода все синаптические веса настраиваются в соответствии с правилом коррекции ошибок, а именно: фактический выход сети вычитается из желаемого, в результате чего формируется сигнал ошибки. Этот сигнал впоследствии распространяется по сети в направлении, обратном направлению синаптических связей. Отсюда и название - алгоритм обратного распространения ошибки. Синаптические веса настраиваются с целью максимального приближения выходного сигнала сети к желаемому.
Методом наименьших квадратов оцениваются коэффициенты заключений правил, так как они линейно связаны с выходом сети.
Общий смысл оценивания по методу наименьших квадратов заключается в минимизации суммы квадратов отклонений наблюдаемых значений зависимой переменной от значений, предсказанных моделью.
Более точно, оценки наименьших квадратов (НК) параметра q получаются минимизацией функции Q по 9, где:

Отметим, что fi(θ) - это известная функция θ,

где i=от 1 до n, εi - это случайные величины (например, погрешности измерений), средние которых обычно полагаются равными 0.
Каждая итерация процедуры настройки выполняется в два этапа. На первом этапе на входы подается обучающая выборка и по невязке между желаемым и действительным поведением сети методом наименьших квадратов находятся оптимальные параметры узлов четвертого слоя. На втором этапе остаточная невязка передается с выхода сети на входы и методом обратного распространения ошибки модифицируются параметры узлов первого слоя. При этом найденные на предыдущем этапе коэффициенты заключений правил не изменяются. Итерационная процедура продолжается, пока невязка превышает заранее установленное значение, т.е. пока сеть не будет обучена.
Обучающий набор данных представляет собой набор наблюдений, для которых указаны число входных и выходных переменных. Нейронные сети могут работать с числовыми значениями, лежащими в ограниченном диапазоне. Кроме того, нейронные сети устойчивы к шумам. Однако у этой устойчивости есть предел: значения, лежащие очень далеко от области нормальных значений переменной, могут исказить результат обучения. Поэтому, в рассматриваемой задаче будут использоваться следующие обучающие данные: амплитуда со значениями в соотношении А1<A2<A3, частота с диапазоном значений в соотношении: H1<Н2<Н3, фаза с диапазоном значений в соотношении: F1<F2<F3, а также гармоническое колебание, которое являются выходом данных.
Формула гармонического колебания математически записывается в виде:

где x(t) - отклонение колеблющейся величины в текущий момент времени t от среднего арифметического за период значения
A(t) - амплитуда колебания, то есть максимальное за период отклонение колеблющейся величины от среднего за период значения, размерность A(t) совпадает с размерностью x(t), в общем случае амплитуда зависит от времени.
ω - циклическая частота, показывающая на сколько радиан (градусов) изменяется фаза колебания за 1 с.
ϕ - начальная фаза колебания.
Обучение и тестирование нейро-нечеткой сети может осуществляться с помощью пакета прикладных программ вычислительной среды Matlab -FuzzyLogicToolbox [9], предназначенного для проектирования и исследования систем нечеткой логики. Пакет FuzzyLogicToolbox поддерживает все фазы разработки нечетких систем, включая синтез, исследование, проектирование, моделирование и внедрение в режиме реального времени. Функции пакета реализуют большинство временных нечетких технологий, включая нечеткий логический вывод, нечеткую кластеризацию и адаптивную нейро-нечеткую настройку (ANFIS).
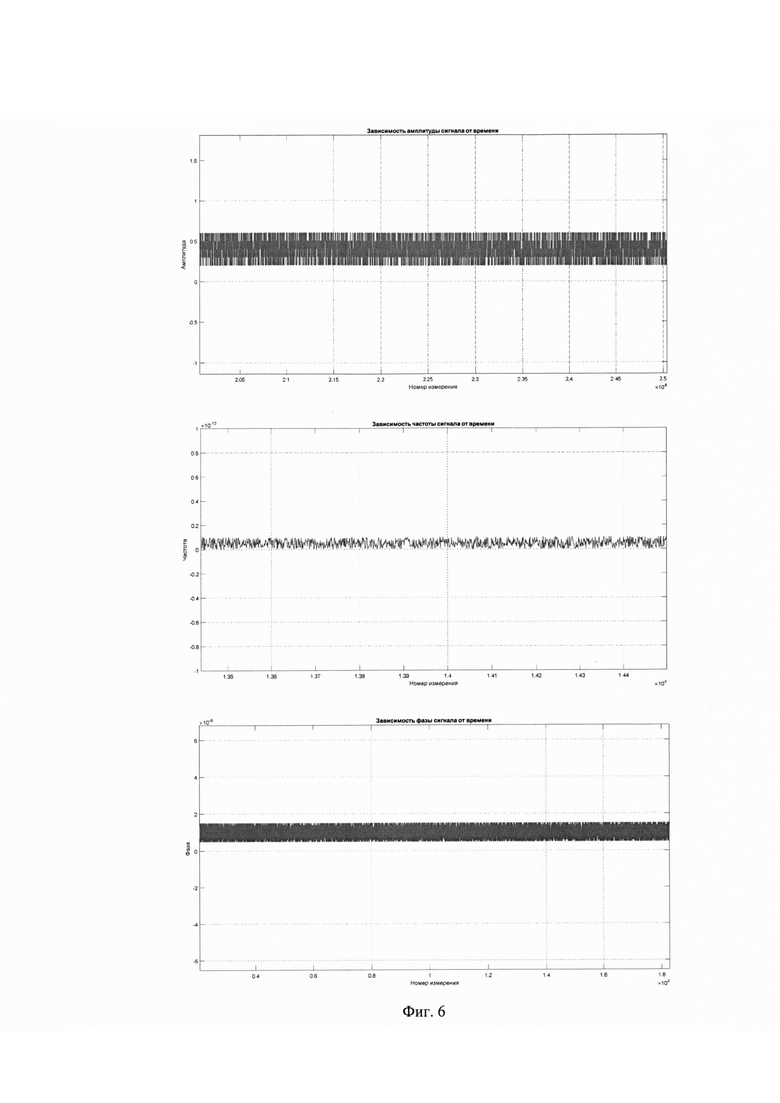
Для обучения сети были выбраны экспериментально полученные данные стабильных сигналов на временном отрезке в 60 дней, за которые было получено 86400 значений каждой из характеристик сигнала. Графики зависимости обучающих значений частоты, амплитуды и фазы от времени представлены на фиг. 6. На всех графиках видно, что разброс параметров не превышает установленных диапазонов. Это говорит о том, что данные подходят для обучения сети и не будут искажать его результат.
Данные тестовой выборки для каждой из характеристик составляют по 21600 значений, а длительность временного отрезка 15 дней. Графики зависимости значений частоты, амплитуды и фазы от времени для тестирования представлены на фиг. 7. На графиках видно, что на разных отрезках измерений значения характеристик выходят за рамки допустимых. Это значит, что на данных промежутках времени возникли флуктуации сигнала.
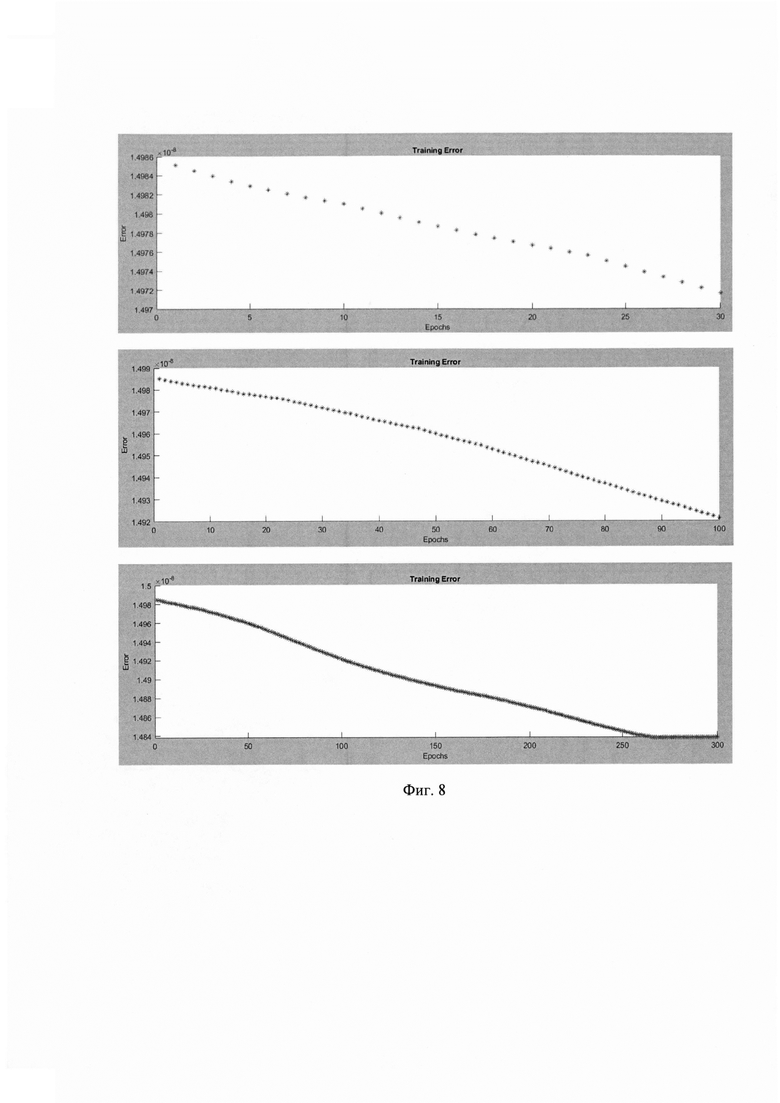
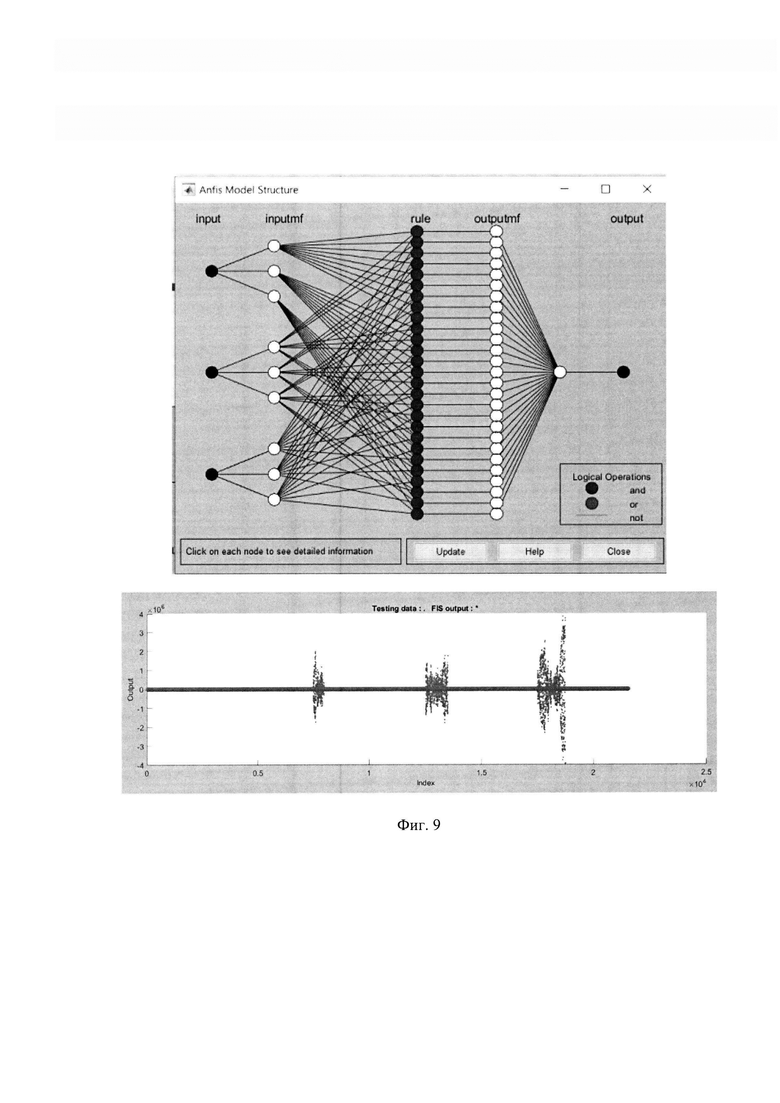
Заключительный шаг проверки алгоритма - загрузка данных обучения и тестирования в ANFIS-редактор среды Matlab для создания нейро-нечеткой сети и ее тестирования. В процессе создания нейро-нечеткой сети задается количество слоев, правила, функция принадлежности. Тренировка нейро-нечеткой сети методом наименьших квадратов и методом обратного распространения ошибки была выполнена на 30, 100 и 300 итерациях (Фиг. 8). На графиках фиг. 8 видно, что увеличением количества итераций тренировки нейро-нечеткой сети ошибка постепенно уменьшается, пока не достигнет 260 итераций, после чего остается неизменной. Следовательно, оптимальным количеством итераций является 300, так как нейро-нечеткая сеть перестает уменьшать ошибку уже после 260. Сгенерированная сеть и результаты тестирования представлены на фиг. 9. На графике результатов тестирования можно заметить, что на отрезках измерений, на которых частоты (график синего цвета) выходят за рамки допустимых из-за флуктуаций сигнала, нейро-нечеткая сеть вывела значения, которые входят в рамки допустимых значений (график красного цвета). Это является очень важным показателем, который значит, что при нестабильности сигнала нейро-нечетка сеть не собьется со своего обучения и продолжит выдавать данные максимально точно, несмотря на возмущающие воздействия.
Рассмотренное показывает, что заявляемое изобретение осуществимо и обеспечивает достижение технического результата, заключающегося в создании устройства стабилизации частоты подстраиваемого генератора, характеризующееся стабильностью и точностью формирующегося выходного сигнала подстраиваемого генератора в условиях возникновения частотных флуктуаций и аномалий различного рода.
Источники информации
1. Дмитриев С.П., Колесов Н.В., Осипов А.В. / Информационная надежность, контроль и диагностика навигационных систем // С-Петербург, ГНЦ РФ ЦНИИ «Электроприбор», 2003.
2. Измерение времени. Основы GPS / Одуан К., Гино Б. // Москва, Техносфера, 2002.
3. Шахгильдян В.В., Ляховский А.А. / Системы фазовой автоподстройки частоты //М., Связь, 1972.
4. SU 1298913 (A1), H03L 7/00, 23.03.1987.
5. US 6784706 (В2), H03L 7/06, 31.08.2004.
6. US 5426672, H04L 7/00, 20.06.1995.
7. RU 2321167 (С2), H04L 7/093, 27.03.2008.
8. Островский Станислав/Нейронные сети для обработки информации//М.: Горячая линия - Телеком, 2018.
9. Штовба С.Д./ Проектирование нечетких систем средствами MATLAB//M.: Горячая линия - Телеком, 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ СКАЧКОВ ОПОРНОГО СИГНАЛА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2006 |
|
RU2321167C2 |
| Способ обнаружения и классификации морских целей с использованием математической модели определения типа цели | 2020 |
|
RU2724990C1 |
| Способ автоматической подстройки частоты генератора опорного сигнала | 1974 |
|
SU758527A1 |
| Система обнаружения и классификации морских целей с использованием математической модели определения типа цели | 2020 |
|
RU2726992C1 |
| Способ для ускоренной синхронизации систем фазовой автоподстройки в электрических сетях и устройство для его реализации | 2020 |
|
RU2767510C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780607C1 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| Модулятор сигналов фазовой телеграфии | 1986 |
|
SU1392628A1 |
| ЭЛЕКТРОННОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ОПРЕДЕЛЕНИЯ РАЗНОСТИ ФАЗ МЕЖДУ ПЕРВЫМ СИГНАЛОМ ДАТЧИКА И ВТОРЫМ СИГНАЛОМ ДАТЧИКА РАСХОДОМЕРА | 2006 |
|
RU2373499C1 |



Изобретение относится к средствам фазовой автоподстройки частоты генераторов. Технический результат – повышение надежности и точности формирования выходного сигнала в условиях возникновения частотных флуктуаций различного рода. Для этого устройство содержит подстраиваемый генератор и опорный генератор. Выходы генераторов через аналого-цифровые преобразователи связаны с входами фазового детектора, выходы которого соединены с входами блока обработки сигнала управления, выход которого соединен с управляющим входом подстраиваемого генератора. Фазовый детектор содержит первый и второй фильтры Гильберта, первый и второй блоки расчета фазы, вычитатель, а также блок расчета характеристик разностного сигнала. С выхода блока расчета характеристик разностного сигнала значения поступают на вход блока децимирующих фильтров, выходные сигналы которого являются выходами фазового детектора. Блок обработки сигнала управления содержит нейро-нечеткую сеть и формирователь управляющего сигнала, реализующие алгоритм формирования сигнала управления на основе анализа характеристик разностного сигнала. 9 ил.
Устройство стабилизации частоты подстраиваемого генератора, содержащее подстраиваемый генератор, опорный генератор и фазовый детектор, отличающееся тем, что введен блок обработки сигнала управления, включающий в свой алгоритм модель нейро-нечеткой сети, входами которой являются амплитуда, фаза и частота разностного сигнала, причем нейро-нечеткая сеть обучена реальными данными, отображающими стабильное состояние генераторов и возможные отклонения состояний генераторов, при этом модель нейро-нечеткой сети выявляет скачок частоты и стабилизирует его, выдавая на выход код управляющего сигнала, причем вход управления подстраиваемого генератора соединен с выходом блока обработки сигнала управления, входы которого соединены с выходами фазового детектора, а выход подстраиваемого генератора и выход опорного генератора через первый и второй АЦП связаны с соответствующими входами фазового детектора, при этом фазовый детектор содержит первый и второй фильтры Гильберта, входы которых образуют, соответственно, первый и второй входы фазового детектора, соединенные с выходами указанных АЦП, первый и второй блоки расчета фазы, входы которых соединены с выходами соответствующих фильтров Гильберта, вычитатель, первый и второй входы которого соединены соответственно с выходами первого и второго блоков расчета фазы, а также блок расчета характеристик разностного сигнала, вход которого соединен с выходом вычитателя, а выходы образуют входы блока децимирующих фильтров, выходы которого соединены с соответствующими входами блока обработки сигнала управления, при этом входы блока обработки сигнала управления являются входами нейро-нечеткой сети, выходы которой являются входами формирователя управляющего сигнала, выдающего на вход подстраиваемого генератора сигнал управления в необходимом формате.
| СПОСОБ КОМПЕНСАЦИИ СКАЧКОВ ОПОРНОГО СИГНАЛА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2006 |
|
RU2321167C2 |
| US 5426672 A1, 20.06.1995 | |||
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ЧАСТОТЫ ПО ЗАДЕРЖКЕ | 2005 |
|
RU2337474C2 |
| УПРАВЛЯЕМЫЙ НАПРЯЖЕНИЕМ ГЕНЕРАТОР ИМПУЛЬСОВ | 1997 |
|
RU2103816C1 |

