Устройство для постановки самоходных исследовательских буев (СИБ) относится к области выталкивающих систем и устройств в судостроении, а именно к устройствам для дистанционного отделения СИБ от морского подвижного носителя, в роли которого может выступать автономный необитаемый подводный аппарат (АНПА) или безэкипажный катер (БЭК). СИБ представляет собой самодвижущийся, автономно управляемый подводный герметичный контейнер, внутри которого находится исследовательская аппаратура. СИБ после пуска с борта АНПА или БЭК должен пройти заданное расстояние и занять заданную точку водного пространства, где включить исследовательскую аппаратуру и начать процесс измерения необходимых параметров водной среды. Морские подвижные носители, такие как АНПА или БЭК имеют на своем борту ограниченные запасы энергии, поэтому пусковые устройства для постановки СИБ не должны потреблять различные виды энергии, приводящие к уменьшению их автономности, такие как энергию сжатого воздуха, пороховых газов, и др.
Известно устройство для подводного пуска АНПА с плавучего объекта (Патент РФ №2654888, МПК F41F 3/07 (2006.01) опуб. 23.05.2018, Бюл. №15). Известное устройство содержит АНПА, обслуживающий отсек для АНПА, разгонный блок для АНПА и шлюзовую камеру, расположенные в районе днища плавучего объекта. Разгонный блок с АНПА установлен в прочной переборке между обслуживающим отсеком и шлюзовой камерой и имеет возможность поворота в вертикальной плоскости. Для осуществления подводного пуска АНПА в «сухую» шлюзовую камеру нагнетают воздух до уравнивания давления с забортной средой, открывают крышку-обтекатель люка в днище корпуса плавучего объекта, в обслуживающем отсеке разгонный блок устанавливают в рабочее положение на величину угла вывода АНПА в забортную среду, фиксируют и системой формирования пускового импульса обеспечивают выход АНПА на выполнение миссии, после чего из шлюзовой камеры вытесняют водную среду и закрывают люк. Недостатком этого устройства является большой расход сжатого воздуха, который надо подавать в шлюзовую камеру до уравнивания давления с забортной средой. На борту плавучего объекта необходимо иметь большой запас сжатого воздуха в баллонах и систему подачи воздуха в шлюзовую камеру. Данное изобретение принимаем в качестве аналога.
Известна конструкция желобных торпедных аппаратов (пусковых устройств) торпедного катера типа Г-5 для торпед калибра 533 мм (см. фиг. 2) (Малые торпедные корабли часть 1 –http://www.moremhod.info/index.php/library-menu/16-morskaya-tematika/218-malye-torpednye-korabli?showall=1). Стрельба торпедами осуществлялась следующим образом: катер ложился на боевой курс, выпускал торпеды в корму хвостовой частью вперед и сам немедленно отворачивал в сторону. У торпеды включался двигатель, и она шла по заданному катером направлению. Торпеды у катера Г-5 выбрасывались из желобового торпедного аппарата назад с помощью толкателей и сжатого воздуха. Теоретически, на неподвижном катере, торпеда должна отойти от катера не менее чем на 10 метров. В момент выстрела на торпеде спускается курок и в форсированном режиме раскручивается гироскоп прибора курса и запускается двигатель гребных винтов. Под действием собственного веса и по первоначальной настройке рулей глубины торпеда уходит на безопасную (для катера) глубину. Недостатком этого устройства является выпуск торпеды (самоходного буя) назад по ходу катера, что невозможно для АНПА и БЭК, так как СИБ не является торпедой. Данное устройство принимаем в качестве аналога.
Известна конструкция бугельных торпедных аппаратов (пусковых устройств) (Системы сброса торпед. Бугельный торпедный аппарат – Текст: электронный. – URL: https://vk.com/wall83260629_16181). Бугельный торпедный аппарат (пусковое устройство) состоит из откидной платформы, на которой с помощью бугелей зафиксирована торпеда. Как правило, пусковые устройства такого типа устанавливались вдоль бортов, реже – в кормовой части малых торпедных катеров. Для пуска платформа откидывалась через борт, после чего расцеплялись замки бугелей, происходил запуск двигателя, и торпеда начинала автономный ход. Недостатком этого устройства является то, что торпеда (самоходный буй) падает в воду вертикально вниз в непосредственной близи от борта катера, что крайне не желательно, так как торпеда может столкнуться с катером или даже попасть под его гребные винты. Данное устройство принимаем в качестве прототипа.
В основу изобретения поставлена задача создания простого и надежного пускового устройства, способного отбросить СИБ далеко от борта БЭК, при этом пусковое устройство не должно использовать энергию сжатого воздуха; пороховых газов, а использовать энергию сжатой пружины.
Сущность изобретения поясняется чертежами (фиг. 1–15), где
- на фиг. 1 показано изображение предлагаемого автономного необитаемого подводного аппарата (АНПА) с нишей и самоходным исследовательским буем (СИБ);
- на фиг. 2 показано схематическое изображение предлагаемого универсального пускового устройства для постановки самоходных исследовательских буев с борта подводного аппарата в разрезе вид сверху;
- на фиг. 3 показано схематическое изображение предлагаемого универсального пускового устройства для постановки самоходных исследовательских буев с борта подводного аппарата до выталкивания СИБ в разрезе А-А;
- на фиг. 4 показано схематическое изображение предлагаемого универсального пускового устройства для постановки самоходных исследовательских буев с борта подводного аппарата после выталкивания СИБ в разрезе А-А;
- на фиг. 5 показано схематическое изображение пускового вала в стопорящем положении в разрезе;
- на фиг. 6 показано схематическое изображение пускового вала повернутого на 180° в разрезе;
- на фиг. 7 показано изображение предлагаемого аналогичного пускового устройства для постановки СИБ с борта безэкипажного катера (БЭК) со стороны СИБ;
- на фиг. 8 показано изображение предлагаемого аналогичного пускового устройства для постановки СИБ с борта БЭК с тыльной стороны;
- на фиг. 9 показано изображение предлагаемого аналогичного пускового устройства для постановки СИБ с борта БЭК вид сбоку;
- на фиг. 10 показано изображение предлагаемого аналогичного пускового устройства для постановки СИБ с борта БЭК без СИБ со стороны толкателя;
- на фиг. 11 показано схематическое изображение разреза пускового устройства по А–А (СИБ находится внутри пускового устройства);
- на фиг. 12 показано схематическое изображение разреза пускового устройства по А–А (СИБ вытолкнут из пускового устройства);
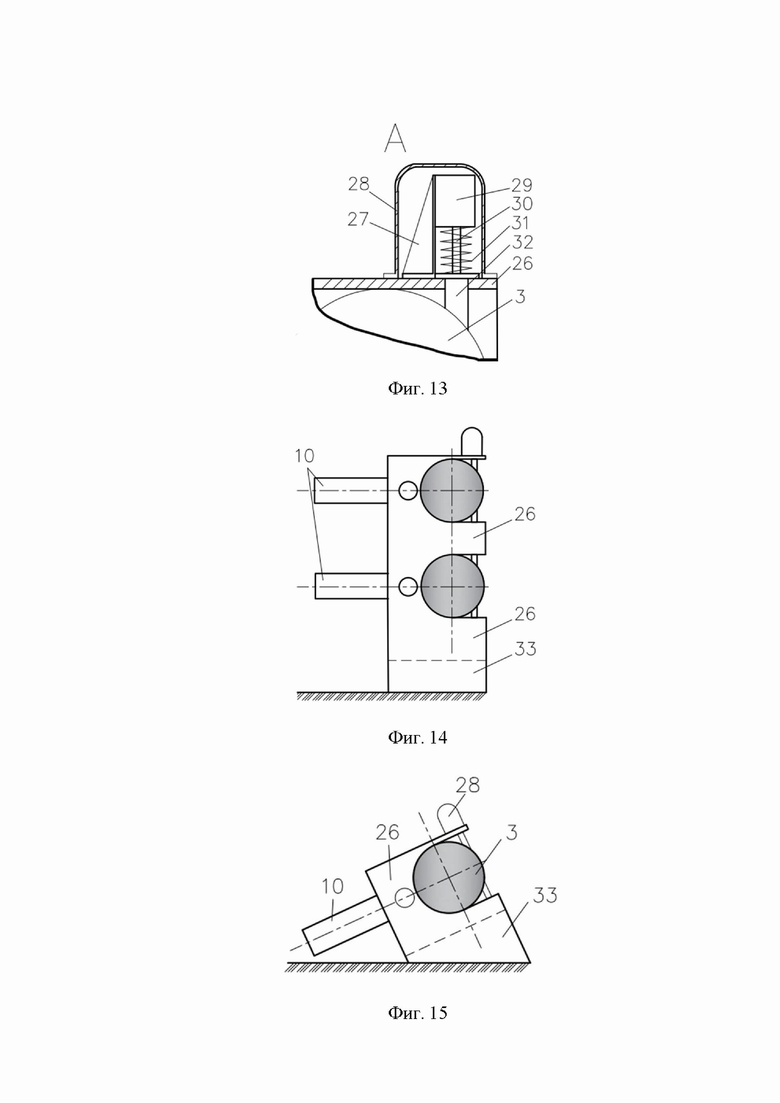
- на фиг. 13 показано схематическое изображение электромагнита в разрезе;
- на фиг. 14 показано изображение 2-ярусной конструкции пускового устройства для постановки СИБ с борта БЭК вид сбоку;
- на фиг. 15 показано изображение пускового устройства под углом для постановки СИБ с борта БЭК вид сбоку.
На фиг. 1–15 обозначены:
1 – корпус АНПА;
2 – ниша;
3 – буй самоходный;
4 – приемник Wi-Fi;
5 – вал пусковой;
6 – толкатель;
7 – выталкиваемый блок плавучести;
8 – электропривод пускового вала;
9 – подшипники пускового вала;
10 – стакан пусковой пружины;
11 – пусковая пружина сжатая;
12 – тарелка пусковой пружины;
13 – шток толкателя;
14 – передатчик Wi-Fi
15 – болт крепежный;
16 – корпус пускового устройства АНПА;
17 – пружинные стопоры (сжатые);
18 – расширитель;
19 – ложемент СИБ;
20 – пружинные стопоры (раскрытые);
21 – пусковая пружина распрямленная;
22 – полукруглая выемка в штоке;
23 – пусковой вал в стопорящем положении;
24 – пусковой вал повернут на 180°;
25 – проточка в пусковом валу;
26 – корпус пускового устройства БЭК;
27 – кронштейн;
28 – колпачок защитный;
29 – электромагнит;
30 – шток защелки;
31 – пружина;
32 – защелка;
33 – фундамент.
Согласно фиг. 1–6, в средней части корпуса 1 АНПА, с обоих его бортов, находятся две ниши 2, в которых установлены два пусковых устройства для выпуска СИБ 3 в направлении, перпендикулярном диаметральной плоскости АНПА за счет энергии сжатых пружин, которые остаются в сжатом (рабочем) состоянии все время до момента пуска. Обратный прием СИБ на борт АНПА или БЭК не предусматривается. Внутри корпуса СИБ находится приемник 4 системы связи Wi-Fi, при помощи которого принимается компьютерная программа-задание на выполнение миссии СИБ, составленная по данным от системы навигации и управления АНПА или БЭК.
Корпус 16 пускового устройства выполнен в виде короба, прикрепленного к корпусу АНПА при помощи болтов 15. Внутри корпуса 16 пускового устройства на ложементе 19 зафиксирован СИБ 3. Внутри корпуса 16 находится передатчик 14 системы связи Wi-Fi, подключенный к системе управления АНПА, при помощи которого передается компьютерная программа-задание на выполнение миссии СИБ. К корпусу 16 прикреплены три полых стакана 10, внутри каждого из них находится сжатая пусковая пружина 11, которая одним своим концом упирается в дно стакана, а другим концом упирается в тарелку 12, прикрепленную к штоку 13. Все три штока 13 прикреплены к толкателю 6, который упирается в борт СИБ. СИБ обладает небольшой отрицательной плавучестью с коэффициентом утяжеления k~1,1. С внешней стороны корпуса пускового устройства установлен выталкиваемый блок плавучести 7 изготовленный из пластика, обладающего положительной плавучестью. Положительная плавучесть блока 7 компенсирует отрицательную плавучесть СИБ, что приводит к обеспечению нулевой плавучести АНПА.
Блок плавучести 7 прижимается к корпусу СИБ при помощи трех пружинных стопоров 17 шарнирно прикрепленных к корпусу 16 (см. фиг. 3). Внешняя часть блока плавучести 7 формирует часть наружных обводов АНПА и закрывает снаружи нишу 2. Снятие стопоров 17 происходит под воздействием трех расширителей 18 прикрепленных к толкателю 6. Удержание пусковых пружин 11 в сжатом состоянии происходит за счет пускового вала 5, уложенного в подшипники скольжения 9 и проходящего по длине корпуса 16. Пусковой вал приводится во вращение на угол от нуля до 180° при помощи электропривода 8, включаемого по команде системы управления АНПА. Каждый из штоков 13 имеет полукруглую выемку 22, куда входит пусковой вал 5, который вместе соприкосновения со штоком имеет проточку 25, которая делит площадь поперечного сечения пускового вала 5 на две равные части (см. фиг. 4). На фиг. 5 показан пусковой вал в стопорящем положении 23, а на фиг. 6 показан пусковой вал, повернутый на 180° 24.
Пусковое устройство, расположенное на АНПА, работает следующим образом. В подводном положении АНПА, во время выполнения своей миссии, СИБ на борту АНПА находится в «спящем» режиме. АНПА удифферентован по плавучести. Если система управления АНПА «приняла решение» на постановку СИБ, то в этом случае на борту АНПА происходит подготовка программы-задания для СИБ. Уже во время подготовки программы-задания по системе связи Wi-Fi на СИБ подается команда на выход из «спящего» режима и приготовление всех своих систем в полную готовность к действию. Далее по системе связи Wi-Fi на СИБ передается (скачивается) программа-задание на выполнение своей миссии. Перед пуском все системы СИБ находятся в рабочем состоянии, а сам буй готов к выполнению своей миссии. Далее, система управления АНПА подает команду на срабатывание электропривода 14 пускового вала 12, при этом электропривод срабатывает и поворачивает пусковой вал 12 на 180°. При этом три проточки в пусковом валу оказываются вверху, что приводит к освобождению сразу трех штоков 9. При этом пружины 11 в стаканах 13 распрямляются (см. фиг. 4) и при помощи тарелок 10 перемещают штоки 9 по направлению к борту АНПА. Все три штока 9 упираются в толкатель 8, который (в свою очередь) упирается в борт СИБ и выталкивает его за борт АНПА на безопасное расстояние. В процессе выталкивания СИБ скользит по своему плоскому ложементу 16, до выхода за борт. Вместе с толкателями 8 перемещаются и три расширителя 17, которые разводят вверх и вниз подпружиненные стопора 17, что приводит к освобождению блока плавучести 15, который также выталкивается за борт АНПА и под воздействием силы плавучести всплывает на поверхность. Одновременное освобождение погруженного АНПА от тяжелого СИБ 3 и легкого блока плавучести 7 не приводит к появлению остаточной плавучести АНПА. СИБ после пуска (выталкивания) под воздействием силы своей отрицательной плавучести начинает плавно погружаться. В это же время система управления СИБ дает команду на запуск двигателя, вращающего гребной винт и буй, развивая заданную скорость, приступает к выполнению своей миссии.
На фиг. 7–15 показано аналогичное пусковое устройство для постановки СИБ с борта БЭК. На фиг. 7 показано пусковое устройство со стороны СИБ. На фиг. 8 показано пусковое устройство с тыльной стороны. На фиг. 9 показано пусковое устройство (вид сбоку). На фиг. 10 показано пусковое устройство без СИБ (со стороны толкателя 6). На фиг. 11 показан разрез пускового устройства по А–А (СИБ находится внутри пускового устройства). На фиг. 12 показан разрез пускового устройства по А–А (СИБ вытолкнут из пускового устройства).
Корпус 26 пускового устройства для БЭК выполнен в виде короба, длина которого меньше длины СИБ, и прикреплен к палубе катера посредством фундамента 33. Фиксация СИБ в пусковом устройстве на БЭК достигается за счет шести электромагнитов 29 (три сверху и три снизу), которые прикреплены к кронштейнам 27 и закрыты сверху защитными колпачками 28 (см. фиг. 13). Подвижный сердечник (не показан) электромагнита 29 через шток 31 прикреплен к защелке 32, которая нагружена пружиной 31. Шесть выдвинутых наружу защелок 32 фиксируют СИБ от перемещения. При срабатывании электромагнитов 29 защелки 32 втягиваются внутрь корпуса 26 и освобождают СИБ.
Возможно расположение корпуса 26 пускового устройства под углом к палубе БЭК (см. фиг. 15), что увеличивает расстояние от корпуса катера места падения СИБ в воду.
Возможна двухъярусная конструкция корпуса 26 пускового устройства (см. фиг. 14), что позволяет компактно разместить большее количество СИБ, не увеличивая площади палубы катера, отведенной под размещение пускового устройства.
Пусковое устройство, расположенное на борту БЭК, работает следующим образом. СИБ на борту БЭК также находится в «спящем» режиме. Если система управления БЭК «приняла решение» на постановку СИБ, то в этом случае на борту катера происходит подготовка программы-задания для СИБ. Уже во время подготовки программы-задания по системе связи Wi-Fi на СИБ подается команда на выход из «спящего» режима и приготовление всех своих систем в полную готовность к действию. Далее по системе связи Wi-Fi на СИБ передается (скачивается) программа-задание на выполнение своей миссии. Перед пуском все системы СИБ находятся в рабочем состоянии, а сам буй готов к выполнению своей миссии. Далее, система управления БЭК подает команду на срабатывание электропривода 14 пускового вала 12, при этом электропривод срабатывает и поворачивает пусковой вал 12 на 180°. В этот же момент подается питание от системы управления БЭК на срабатывание шести электромагнитов 29, которые втягивают защелки 32 и освобождают СИБ. Далее, три проточки в пусковом валу оказываются вверху, что приводит к освобождению сразу трех штоков 9. При этом пружины 11 в стаканах 13 распрямляются и при помощи тарелок 10 перемещают штоки 9 по направлению к борту БЭК. Все три штока 9 упираются в толкатель 8, который (в свою очередь) упирается в борт СИБ и выталкивает его за борт катера на безопасное расстояние. В процессе выталкивания СИБ скользит по своему плоскому ложементу 16, до выхода за борт. СИБ после пуска (выталкивания) падает в воду и под воздействием силы своей отрицательной плавучести начинает плавно погружаться. В это же время система управления СИБ дает команду на запуск двигателя, вращающего гребной винт и буй приступает к выполнению своей миссии.
Техническим результатом является создание пускового устройства, выполняющего поставленную задачу выталкивания СИБ с борта АНПА или БЭК на безопасное расстояние от корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пусковая установка с гравитационно-пружинным выстреливанием подводных снарядов с возможностью размещения на плавсредствах и/или летательных аппаратах | 2024 |
|
RU2834491C1 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
| СПОСОБ МОНИТОРИНГА ПОДВОДНОЙ ОБСТАНОВКИ В МОРСКОМ РАЙОНЕ | 2023 |
|
RU2797206C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| Исследовательская необитаемая малая подводная лодка | 2017 |
|
RU2651942C1 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| ДВУХМОДУЛЬНАЯ ПОДВОДНАЯ ЛОДКА С АВАРИЙНО-СПАСАТЕЛЬНОЙ СИСТЕМОЙ, ОСНАЩЕННАЯ ОПЕРАТИВНО-ТАКТИЧЕСКИМ КОМПЛЕКСОМ | 2005 |
|
RU2309871C2 |
| РАДИОБУЙ ПОДВОДНОГО ПЛАВСРЕДСТВА ПОДЛЕДНЫЙ | 2018 |
|
RU2690788C1 |
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2016 |
|
RU2652610C1 |
Универсальное пусковое устройство для постановки самоходных исследовательских буев с борта автономного необитаемого подводного аппарата или безэкипажного катера содержит корпус пускового устройства, толкатель, выталкивающий буй на безопасное расстояние от корпуса в направлении, перпендикулярном вектору скорости, полые стаканы с пружинами для выталкивания буя, фиксаторы, выталкиваемый блок плавучести, электропривод со штоками. Корпус выполнен в виде короба. Буй зафиксирован в корпусе пускового устройства при помощи выталкиваемого блока плавучести, который зафиксирован при помощи стопоров. Фиксация пружин в сжатом состоянии достигается при помощи пускового вала, проходящего по длине корпуса пускового устройства. Управление осуществляется при помощи приемника и передатчика системы беспроводной связи Wi-Fi. Технический результат – повышение простоты и надежности пускового устройства. 5 з.п. ф-лы, 15 ил.
1. Универсальное пусковое устройство для постановки самоходных исследовательских буев с борта автономного необитаемого подводного аппарата (АНПА) или безэкипажного катера (БЭК), содержащее платформу, установленную вдоль борта, на которой зафиксирован самоходный исследовательский буй (СИБ) и устройство для его фиксации и освобождения с целью падения в воду, отличающееся тем, что корпус пускового устройства выполнен в виде короба, внутри которого находится толкатель, выталкивающий буй на безопасное расстояние от корпуса АНПА или БЭК в направлении, перпендикулярном вектору их скорости, под воздействием силы сжатых пружин, находящихся в полых стаканах и прикрепленных к корпусу пускового устройства, при этом сила воздействия пружин передается на тарелки и штоки, которые упираются в толкатель, СИБ зафиксирован в корпусе пускового устройства АНПА при помощи выталкиваемого блока плавучести, который зафиксирован при помощи стопоров, раскрываемых при помощи расширителя в момент выталкивания СИБ и блока плавучести за борт, фиксация пружин в сжатом состоянии достигается при помощи пускового вала, проходящего по длине корпуса пускового устройства и уложенного в подшипники скольжения, проворачиваемого на угол от нуля до 180° при помощи электропривода, который своими проточками, соприкасающимися со штоками пружин, удерживает штоки и пружины в сжатом состоянии, срабатывание сжатых выталкивающих пружин (их распрямление) происходит вследствие снятия стопоров с каждого штока путем поворота пускового вала на 180°, при этом проточка в пусковом валу не препятствует перемещению штока и распрямлению пусковых пружин.
2. Универсальное пусковое устройство по п.1, отличающееся тем, что передача данных от системы управления АНПА или БЭК на систему управления СИБ достигается при помощи приемника и передатчика системы беспроводной связи Wi-Fi.
3. Универсальное пусковое устройство АНПА по п.1, отличающееся тем, что выталкиваемый блок плавучести компенсирует отрицательную остаточную плавучесть СИБ.
4. Универсальное пусковое устройство БЭК по п.1, отличающееся тем, что фиксация СИБ в пусковом устройстве происходит за счет электромагнитных замков, содержащих электромагнит и подпружиненную защелку.
5. Универсальное пусковое устройство БЭК по п.1, отличающееся тем, что пусковое устройство для БЭК может быть установлено под углом к плоскости палубы для увеличения дальности броска.
6. Универсальное пусковое устройство БЭК по п.1, отличающееся тем, что пусковое устройство выполнено спаренным, что увеличивает количество СИБ на борту БЭК и экономит место не его палубе.
| СПОСОБ ОТДЕЛЕНИЯ ОБЪЕКТА ОТ НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2499215C1 |
| ПОДВОДНАЯ ЛОДКА С ВОЗДУШНЫМИ ТОРПЕДНЫМИ АППАРАТАМИ | 2002 |
|
RU2219096C1 |
| Агрегат для брикетирования соломы | 1958 |
|
SU117601A1 |
| КЛИЗМА "FINGERS" | 1991 |
|
RU2008930C1 |
| EP 1950521 B2, 03.10.2018 | |||
| US 6834608 B1, 28.12.2004. | |||

