Изобретение относится к области морской техники и предназначено для освещения подводной обстановки в ограниченном морском районе при поиске движущихся подводных объектов, а также их последующей нейтрализации.
Известен способ освещения подводной обстановки (патент РФ 2555192С1, МПК G01S 15/87(2006.01), опубликованный 2015.07.10). Изобретение относится к гидроакустике и может быть использовано поисковой подводной лодкой (ПЛ). Техническим результатом здесь является расширение зоны освещения подводной обстановки за счет длительного поиска ПЛ противника гидролокатором гидроакустического комплекса (ГАК) поисковой ПЛ. Для этого осуществляют установку традиционным методом, например, с самолета, сети автоматических гидроакустических станций (АГАС) на границе зоны обзора действия гидролокатора ГАК поисковой ПЛ, определяют дистанцию до подводной цели, а также направление на цель, затем дальность и направление кодируются трехразрядным кодом каждый и передаются на приемный тракт гидролокатора ГАК поисковой ПЛ двухчастотным кодом, что в конечном счете позволяет поисковой ПЛ наблюдать за целью за пределами дальности гидролокатора и тем самым увеличить зону контроля системы освещения подводной обстановки. Передача информации от АГАС на ПЛ происходит только в том случае, если автоматическая гидроакустическая станция классифицировала обнаруженную цель как ПЛ.
Недостатком данного метода является, использование дорогостоящих, громоздких АГАС вместо недорогих малоразмерных радиогидроакустических буев (РГБ), кроме этого, необходимо точное временное и пространственное согласование работы поисковой ПЛ и противолодочной авиации, осуществляющей постановку АГАС, что не всегда возможно в боевых условиях обстановки и что сводит эффективность данного метода к минимуму.
Известно устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа (патент РФ 2751735, МПК B64F 1/00 (2021.05); B64F 1/12 (2021.05), опубликованный 2021.07.160 бюл. №20). Известно устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа (БПЛА), содержащее размещенные на площадке безэкипажного катера (БЭК) посадочные опоры с магнитным реагентом, посадочную площадку, в которую установлены электромагниты, датчик приближения БПЛА к посадочной площадке, блок управления, имеющий выход, предназначенный для управления электромагнитом, пульт ручного управления, размещенные в посадочной платформе n аналогичных малых электромагнитов, образующих при включении равномерное поле из локальных концентраций магнитного потока. Обеспечивается повышение эффективности и надежности фиксации БПЛА на судне в условиях качки, ветра и при наличии больших статических кренов и дифферентов.
Недостатком данного изобретения является, то, что само по себе данное устройство не способно выполнить задачу по самостоятельному поиску и уничтожению (нейтрализации) подводных объектов и может рассматриваться как необходимый вспомогательный элемент. Данное изобретение принимаем в качестве аналога.
Известен безэкипажный катер (БЭК) «Искатель», управляемый при помощи берегового центра управления (БЦУ), (Источник: Роботизированный много-функциональный безэкипажный катер «Искатель» - Текст: электронный. - URL: http://bastion-karpenko.ru/iskatel-bka/). БЦУ и его аппаратно-программный комплекс, реализованный в интересах БЭК, позволяет, как сохранить ручное управление на борту катера, так и реализовать два варианта дистанционного управления. Состав БЦУ: центральный вычислитель; автоматизированные рабочие места; средства радиосвязи; пакет программных продуктов. Средства радиосвязи - информационно-командная радиолиния со скоростью передачи информации 20 Мбит/с (до 30 км); WiMax (до 10 км). Автоматизированные рабочие места: планшеты навигации и управления; штурвал, рычаг подачи газа. Недостатком здесь является то, что БЦУ катера «Искатель» изначально не предназначено для обеспечения процесса поиска и нейтрализации подводных целей. БЦУ БЭК «Искатель» принимаем в качестве аналога.
Известно универсальное пусковое устройство для постановки самоходных исследовательских буев с борта автономного необитаемого подводного аппарата или БЭК (патент РФ 2779325, МПК B63G 8/00 (2006.01) и F41F 3/10 (2006.01) опубликованный 06.09.2022, Бюл. 25). Недостатком данного изобретения является, то, что само по себе данное устройство не способно выполнить задачу по самостоятельному поиску и уничтожению (нейтрализации) подводных целей и может рассматриваться как необходимый вспомогательный элемент. Данное изобретение принимаем в качестве аналога.
Известен способ применения радиогидроакустических буев реактивных (патент РФ 2525189 С2, МПК B63G 9/00(2006.01); B63B 22/00(2006.01), опубликованный 2014.908.10). Изобретение относится к способам наблюдения за подводной средой. Способ применения радиогидроакустических буев реактивных (РГБР) с надводных кораблей для наблюдения за подводной обстановкой, с выставлением буев по окружности, заключается в том, что определяют координаты центра окружности, на счетно-решающем приборе (СРП) радиус окружности, требуемое число буев и координаты точек их местонахождения, заряжают пусковую установку (ПУ) необходимым числом РГБР, решают на приборах управления стрельбой задачи по наведению ПУ для выполнения стрельбы, наводят ПУ для стрельбы в первую точку, подают питание на пиропатроны запуска ракетного двигателя РГБР, выстреливают первый РГБР, наводят ПУ и стреляют РГБР в последующие точки, применяют сигналы от буев после их приводнения и начала работы. На СРП рассчитывают радиус сектора, в котором предполагается движение подводного объекта, требуемое число буев и координаты точек их местонахождения. Таким образом, достигается наблюдение за подводной обстановкой.
Недостатком данного способа является использование РГБР, согласно патенту РФ 2400392, конструкция которого в настоящее время промышленностью не реализована (таких буев реально не существует). Данное изобретение принимаем в качестве аналога.
Известен способ освещения подводной обстановки (патент РФ 2681476, МПК B63G 13/00 опубликованный 2018.12.06). Изобретение относится к области морской техники и предназначено для освещения подводной обстановки. Техническим результатом предлагаемого способа является повышение эффективности освещения подводной обстановки при поиске в заданном районе ПЛ противника. Способ освещения подводной обстановки, включает поиск ПЛ с применением пассивных радиогидроакустических буев (РГБ), которые сбрасывают с корабля или летательного аппарата в районе возможного нахождения вражеской ПЛ. Далее ПЛ обнаруживают одним или несколькими РГБ и передают информацию об этом по радиоканалу на приемное устройство, расположенное на летательном аппарате, корабле или береговом посту. Выставленные РГБ контролируются кораблем, который отводят от линии буев на заданное расстояние и переводят его в дрейф или ставят на якорь. Далее, корабль выстреливает в расчетную точку водного пространства в качестве взрывного источника звука (ВИЗ) реактивную глубинную бомбу, которая погружается на заданную глубину и взрывается. Корабельная ГАС, принимает звуковую волну от подводного взрыва, координаты которого известны, и волну, отражаемую корпусом ПЛ, по времени прихода сигналов на приемные устройства и их направлению рассчитывают координаты ПЛ-цели.
Недостатком данного способа является использование разнородных сил (надводного корабля, его оружия и летательного аппарата с РГБ), для поиска подводной лодки - цели. Использование разнородных сил для поиска ПЛ - цели является сложной тактической задачей, требующей высокой выучки экипажей кораблей и самолетов и достигается многочасовыми дорогостоящими тренировками. Недостатком данного способа является также использование реактивной глубинной бомбы в качестве ВИЗ. Данный недостаток позволяет ПЛ - цели обнаружить шум взрыва, тем самым обнаружить корабль, и предпринять меры по нанесению удара своим оружием по обнаружившему себя кораблю. Взрыв реактивной глубинной бомбы на заданной глубине фиксируется на борту ПЛ, где предпринимаются меры по изменению ее параметров движения (скорость, курс, глубина погружения) с целью уклонения от возможного уничтожения. Данное изобретение принимаем в качестве прототипа.
В основу предлагаемого изобретения поставлена задача создания способа освещения подводной обстановки и нейтрализации обнаруженных объектов на базе БЭК, управляемого дистанционно при помощи БЦУ и предназначенного для поиска и уничтожения подводных целей, подводных средств движения (ПСД) и сверхмалых подводных лодок (СМПЛ). Данный способ лишен вышеуказанных недостатков и является более дешевым и простым. Отсутствие людей на БЭК гарантирует им полную безопасность при проведении боевых действий связанных с риском для жизни. Сущность изобретения поясняется следующими схемами:
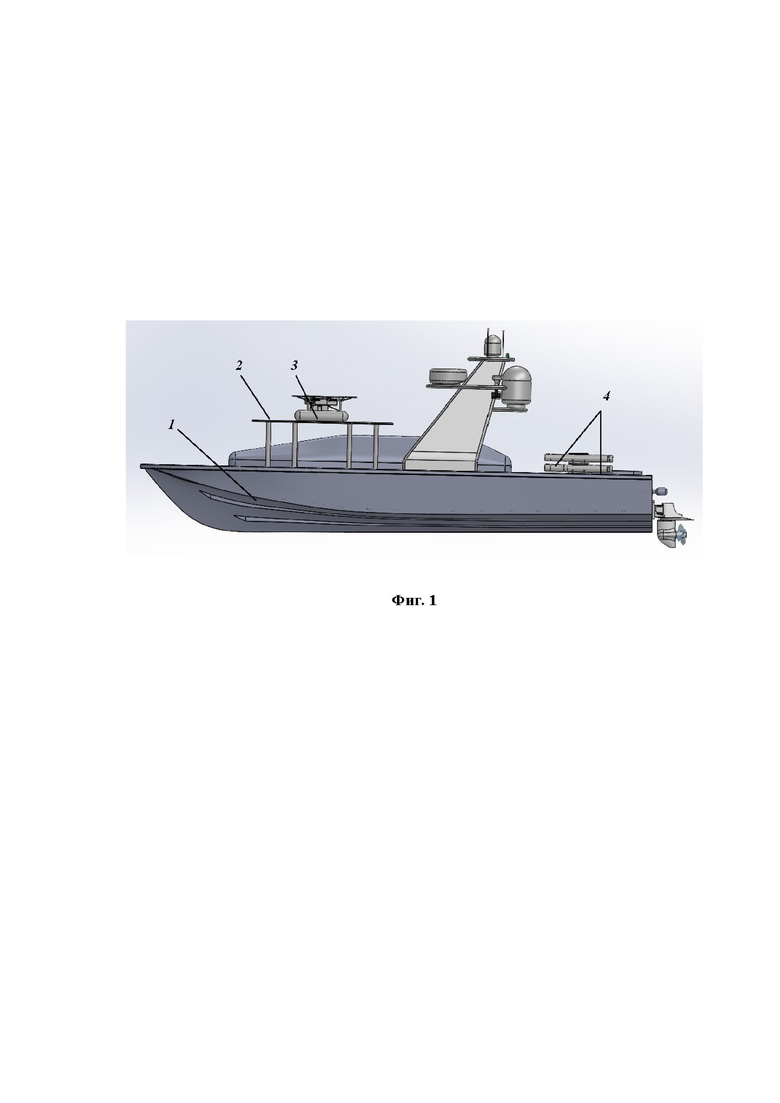
- на фиг.1 показан общий вид БЭК;
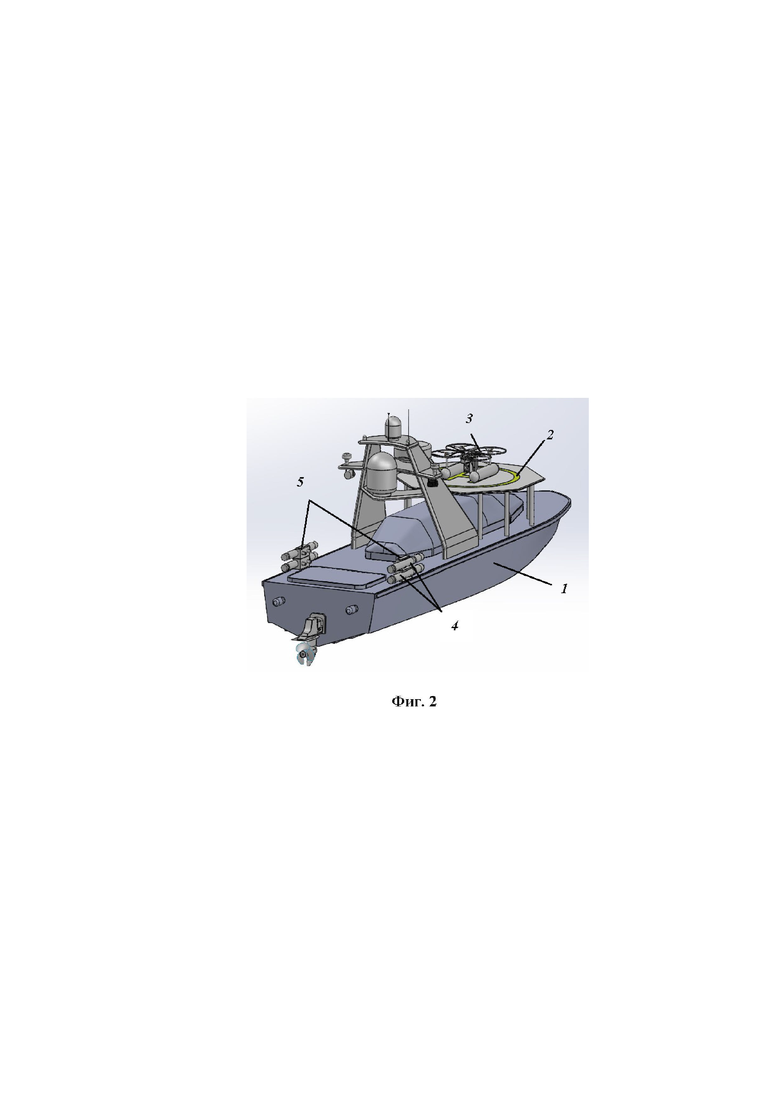
- на фиг.2 показан БЭК, вид 3/4;
- на фиг.3 показан общий вид БЦУ;
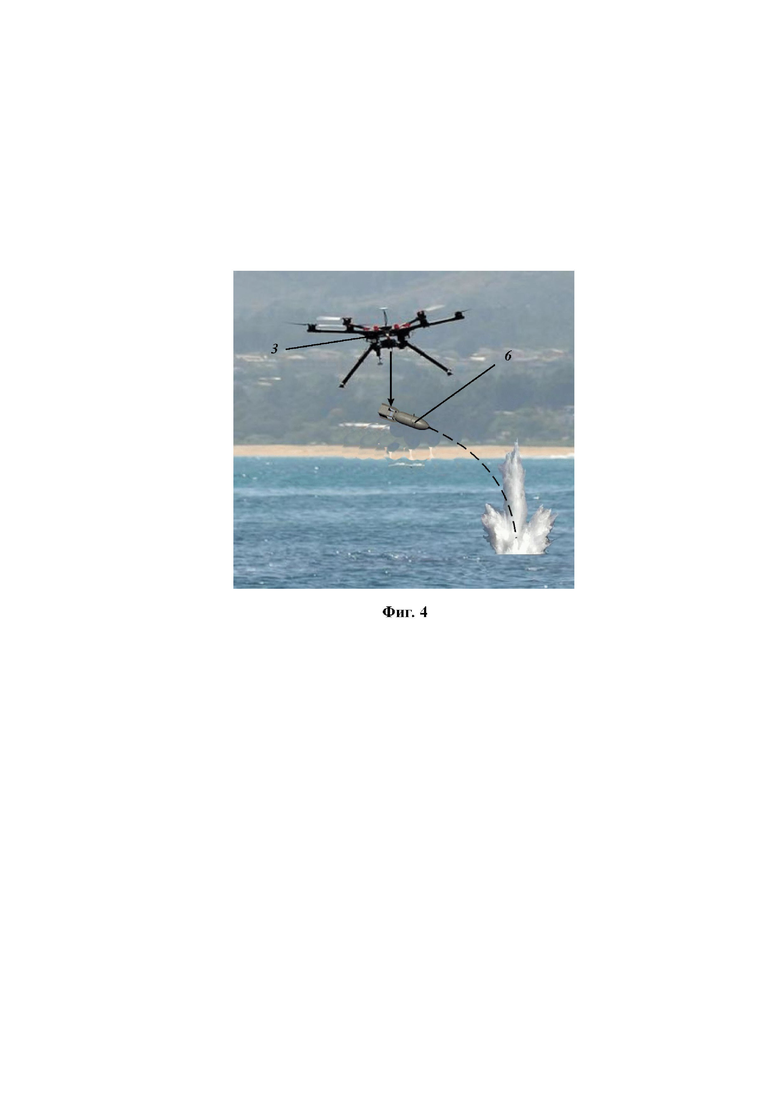
- на фиг.4 показан принцип сброса ВИЗ или глубинной бомбы с квадрокоптера на обнаруженную подводную цель;
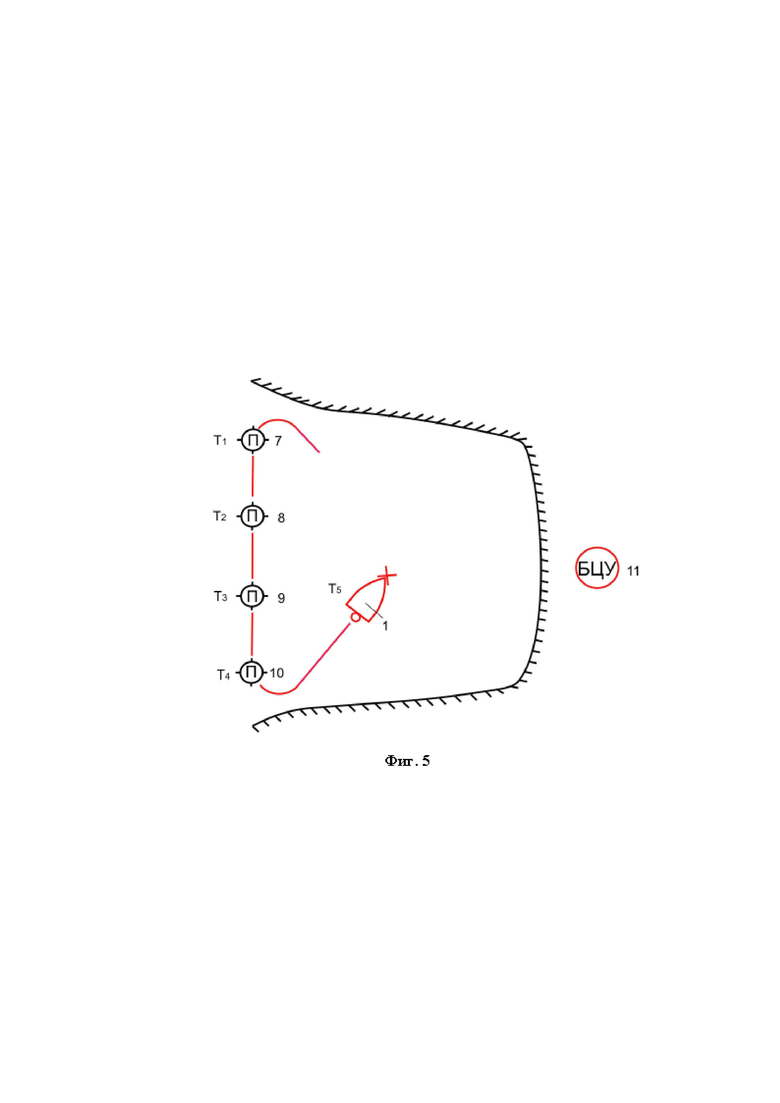
- на фиг.5 показана схема постановки линии РГБ на рубеже поиска;
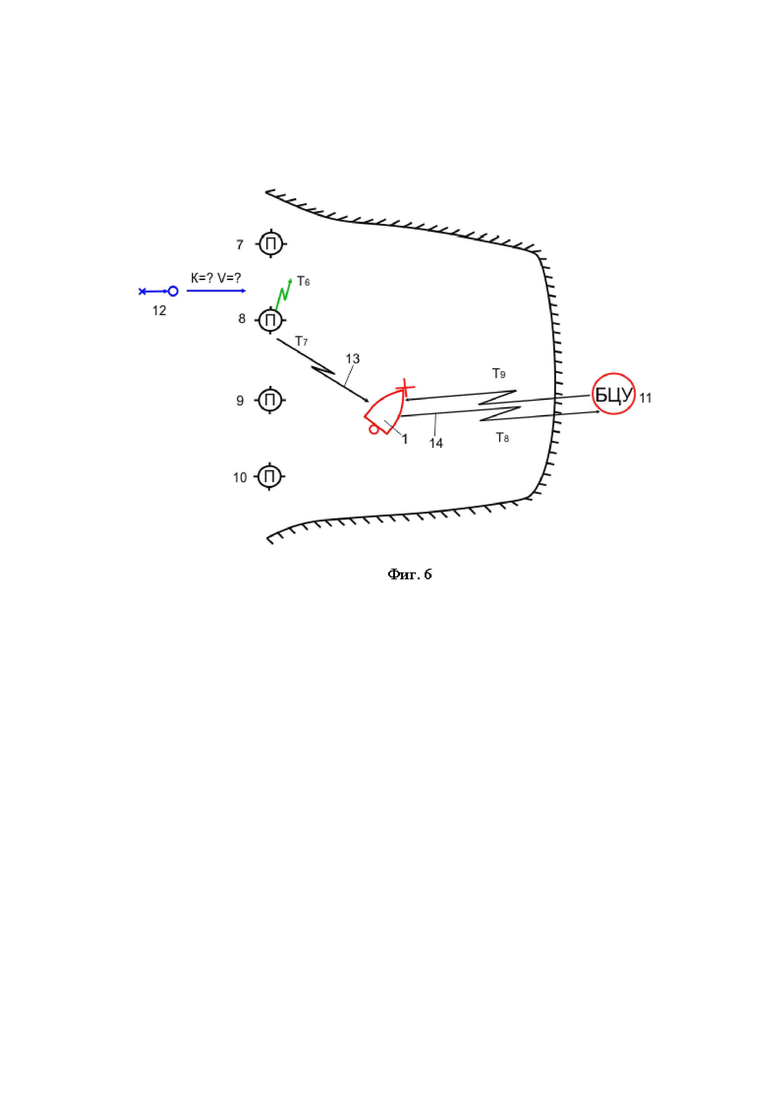
- на фиг.6 показана схема обнаружения подводного средства движения боевых пловцов;
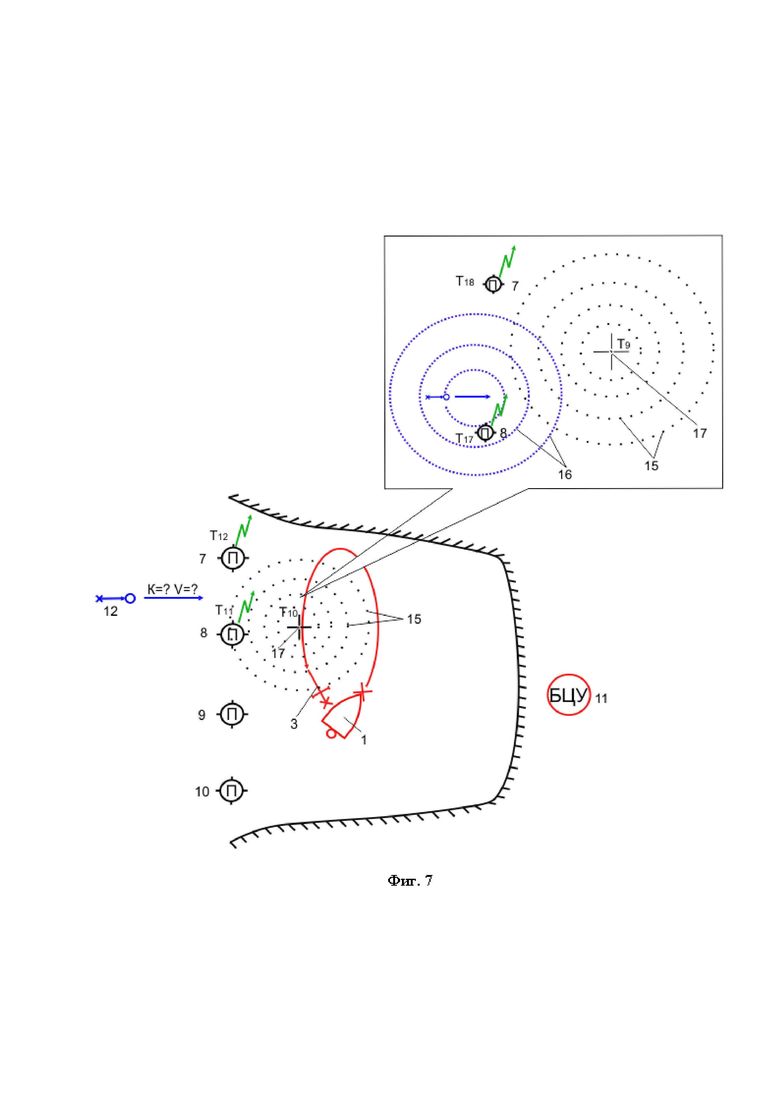
- на фиг.7 показана схема уточнения параметров движения ПСД боевых пловцов с помощью ВИЗ;
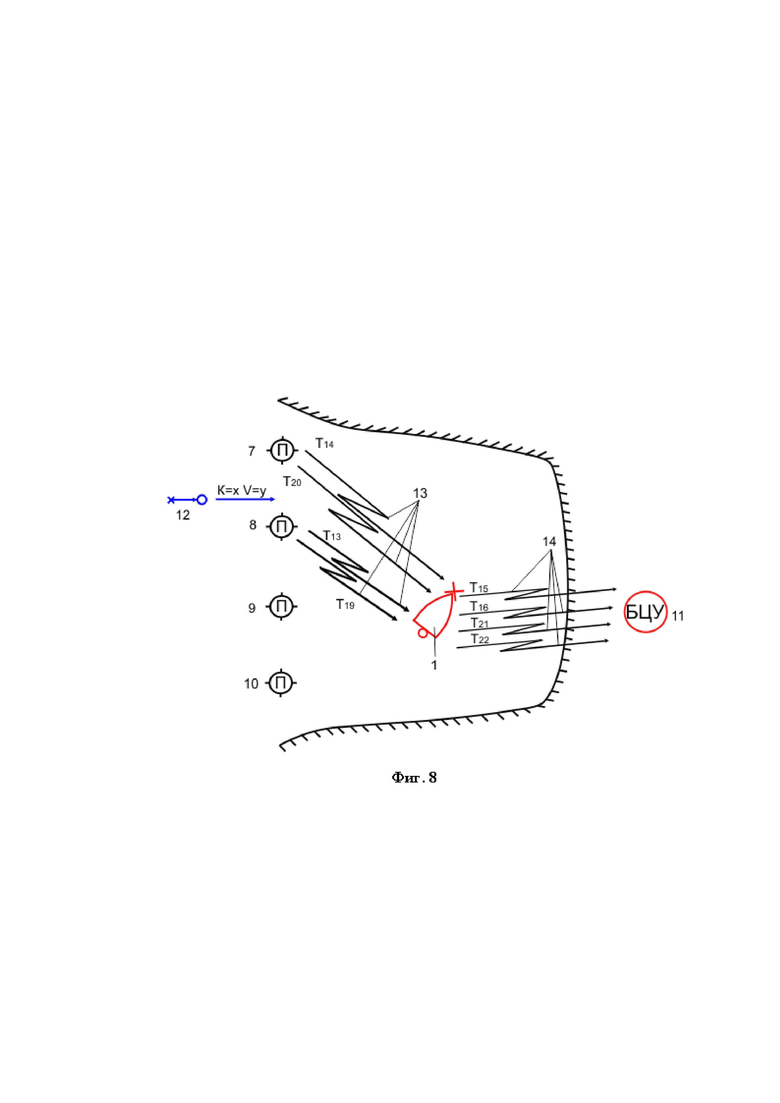
- на фиг.8 показана схема взаимодействия средств поиска БЭК.
На этих рисунках обозначены:
1 - БЭК;
2 - посадочная площадка квадрокоптрера;
3 - БПЛА (квадрокоптер);
4 - РГБ;
5 - пусковое устройство;
6 - сбрасываемый боеприпас (малогабаритный ВИЗ или глубинная бомба);
7 - координаты РГБ №1;
8 - координаты РГБ №2;
9 - координаты РГБ №3;
10 - координаты РГБ №4;
11 - береговой центр управления (БЦУ);
12 - подводное средство движения боевых пловцов;
13 - радиолинии связи РГБ - БЭК;
14 - радиолинии связи БЭК - БЦУ;
15 - прямой акустический сигнал ВИЗ;
16 - отраженный акустический сигнал ВИЗ;
17 - точка сброса ВИЗ;
Т1 - Т22 - временные интервалы.
ПД БЭК 1 (см. фиг.1) оснащен посадочной площадкой 2 согласно изобретению (патент РФ 2751735, опубл 2021.07.16), на которой базируется квадрокоптер 3. Квадрокоптер снабжен сбрасываемыми боеприпасами 6 (см. фиг.4) в качестве которых могут использоваться малогабаритные ВИЗ или глубинная бомба (см. Edge Group представляет дроны-камикадзе на выставке IDEX 21 http: //factmil. com/news/22_02_2021_edge_group_predstavljaet_drony_kamikadze_na_vystavke _idex_21/2021-02-22-10010). В кормовой части по бортам БЭК находятся два пусковых устройства 5 согласно изобретению (патент РФ 2779325, МПК B63G 8/00 (2006.01) и F41F 3/10 (2006.01) опубликованный 06.09.2022, Бюл. 25), куда установлен комплект из четырех РГБ 4 (по два на каждое пусковое устройство), предназначенные для сбрасывания буев в воду по команде от БЦУ. Комплект РГБ, предназначен для обнаружения подвижных целей в толще воды. Преимуществами РГБ по сравнению с другими средствами обнаружения подводных объектов считаются:
- малый вес и габариты;
- большая дальность обнаружения подводных целей;
- хорошая точность определения координат подводных целей и элементов их движения;
- непрерывность наблюдения за подводной обстановкой;
- большая длительность работы;
- возможность одновременного приема информации от нескольких буев.
БЭК оснащен спутниковой системой навигации, позволяющей с высокой точностью (3 - 5 м) определять свои координаты, координаты всех выставленных РГБ и координаты точек сброса ВИЗ с квадрокоптера. Координаты квадрокоптрера, выполняющего поставленную задачу в воздухе определяются при помощи бортовой радиолокационной станции БЭК. Координаты всех целей передаются на БЦУ (фиг.3) и наносятся на электронную карту БЭК (фиг.1 и 2) управляется дистанционно по радиоканалу при помощи БЦУ 11, куда сходится вся информация о поисковой операции и принимается решение на нейтрализацию обнаруженной подводной цели. Тактико-технические характеристики ПД БЭК, полученные в результате расчетов - следующие: водоизмещение 4,5 т; длина 9,0 м; ширина 2,2 м; высота борта 1,2 м; осадка 0,45 м; скорость на полном ходу 45 уз; дальность хода 370 миль; автономность 20 ч; мощность двигателя 550 кВт; запас топлива 600 кг.
Заявляемый способ заключается в следующем: для проведения поисковой операции БЭК 1 выдвигается на рубеж постановки РГБ. В точке с известными координатами 7 во время Т1 выставляется РГБ№1, в точке с известными координатами 8 во время Т2 выставляется РГБ №2, в точке с известными координатами 9 во время Т3 выставляется РГБ №3, в точке с известными координатами 10 во время Т4 выставляется РГБ №4 (фиг.6).
РГБ выставляются на расстоянии не более двух радиусов максимальной зоны обнаружения в целях обеспечения перекрытия площади обнаружения смежными буями. Все РГБ приводятся в рабочее положение. В заданное время Т5, БЭК ложится в дрейф с выключенными двигателями, получая питание от бортовой аккумуляторной батареи. ПСД (или СМПЛ) 12 двигается через линию РГБ неизвестными курсом и скоростью (фиг.7). РГБ №2 в точке 8 первым принимает акустический шум подводного объекта во время Т6, так как он ближе находится к подводному объекту. Далее РГБ№2 в точке 8 направляет во время Т7 полученные сигналы по радиопередающему тракту 13 на БЭК 1. Далее БЭК 1 во время Т8 транслирует полученную информацию на БЦУ 11.
БЦУ, обработав полученные сигналы, во время Т9 выдает команду на БЭК на вылет квадрокоптера 3 в точку с заданными координатами, и сброс ВИЗ (фиг.5). ВИЗ сбрасывается в точке 17 во время Т10. РГБ№2 в точке 8 принимает прямой акустический шум 15 от взрыва ВИЗ первым, во время Т11. РГБ№1 в точке 7 принимает прямой акустический шум 15 от взрыва ВИЗ вторым, во время Т12. Разница во времени приема акустических сигналов обусловлена разной удаленностью РГБ от ВИЗ. РГБ №2 в точке 8 направляет полученный сигнал на БЭК по радиоканалу связи РГБ - БЭК 13 во время Т13, а РГБ№1 в точке 7 - во время Т14. Затем БЭК передает полученные РГБ прямые сигналы ВИЗ на БЦУ (Т15, Т16) по радиоканалу связи БЭК - БЦУ 14. РГБ №1 и 2 в точках 7 и 8 принимают отраженные акустические сигналы от подводного объекта (Т17, Т18).
Далее, РГБ №1 и 2 в точках 7 и 8 направляют полученные отраженные сигналы на БЭК 1 (время Т19, Т20), которые перенаправляются в БЦУ для дальнейшей обработки полученных сигналов, и вычисления параметров движения подводного объекта (время Т21, Т22) (см. фиг.7). Считая что подводный объект двигается на охраняемую территорию, зная уровень мощности прямого 15 и отраженного 16 сигналов, принятых разными РГБ, разницу во времени приема этих сигналов, скорость звука в воде в данной акватории, можно рассчитать примерный курс и примерное направление движения подводного объекта. Дистанция до обнаруженного объекта после применения взрывного источника звука рассчитывается по формуле
 ,
,
где  - дистанция до цели от РГБ №n;
- дистанция до цели от РГБ №n;  - время задержки звукового сигнала от цели до РГБ №n; С - скорость звука в воде.
- время задержки звукового сигнала от цели до РГБ №n; С - скорость звука в воде.
Таким же способом рассчитывается дистанция до всех остальных РГБ. В соответствии со сноской на фиг.8 строится «кривая прохода» обнаруженного объекта, т.е. по нескольким среагировавшим РГБ определяется примерное местонахождение противника. С ростом числа РГБ, принявших полезный акустический шум, увеличивается точность определения параметров движения цели.
В качестве сбрасываемого боеприпаса 6 может быть использован ВИЗ или малогабаритная глубинная бомба предназначенная для поражения ПСД или СМ ПЛ. Масса заряда взрывчатого вещества противодиверсионного боеприпаса, сбрасываемого с квадрокоптера, может быть порядка 0,1 - 1,0 кг. Об этом говорят результаты зарубежных исследований по расчету радиуса воздействия подводных взрывов на организм человека, приведенных в работе (Кранов А.И. Исследования поражающих факторов подводного взрыва в США и Великобритании. // Зарубежное военное обозрение. 2003. №6. С.50 - 55).
В итоге разработан способ освещения подводной обстановки и нейтрализации обнаруженных объектов на базе БЭК, который управляется дистанционно при помощи БЦУ. Данный способ является более дешевым и простым в сравнении с прототипом. Отсутствие людей на БЭК гарантирует им полную безопасность при проведении боевых действий связанных с риском для жизни.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достижимым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем и пригодно к использованию. Применение данного способа освещения подводной обстановки позволит вести скрытный поиск мобильных подводных объектов и их нейтрализацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
| СПОСОБ МОНИТОРИНГА ПОДВОДНОЙ ОБСТАНОВКИ В МОРСКОМ РАЙОНЕ | 2023 |
|
RU2797206C1 |
| РЕАКТИВНЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2021 |
|
RU2788510C2 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2021 |
|
RU2769559C1 |
| РЕАКТИВНАЯ СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2012 |
|
RU2510353C2 |
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |

Изобретение относится к способу освещения подводной обстановки и нейтрализации подводных объектов. Для освещения подводной обстановки сбрасывают радиогидроакустические буи в районе возможного нахождения подводной лодки, с помощью которых обнаруживают подводную лодку, передают информацию на летательный аппарат или поисковый корабль, который используется в качестве единственного поискового средства и одновременно средства нейтрализации, и в качестве которого применяется безэкипажный катер, управляемый с берегового центра управления. Выстреливают в назначенное время или с заданным интервалом реактивную глубинную бомбу, погружают ее на заданную глубину и подрывают, принимают звуковую волну от подводного взрыва и волну, отражаемую корпусом подводной лодки, определяют по времени прихода сигналов и их направлению координаты подводной лодки, которые используют для ее нейтрализации. Обеспечивается повышение безопасности людей за счет применения безэкипажного катера. 5 з.п. ф-лы, 8 ил.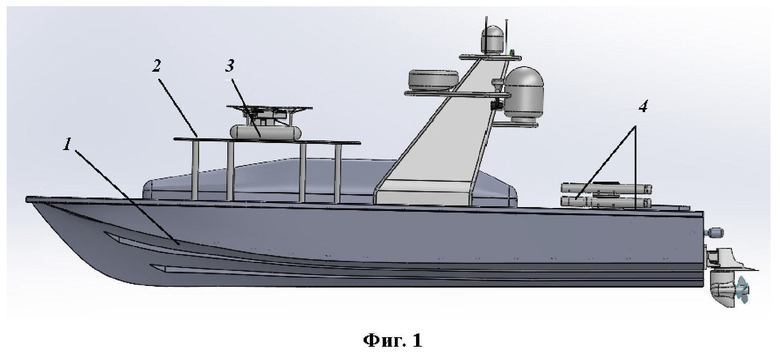
1. Способ освещения подводной обстановки и нейтрализации обнаруженных объектов с применением радиогидроакустических буев (РГБ), которые сбрасывают с летательного аппарата в районе возможного нахождения подводной лодки, обнаруживают подводную лодку одним или несколькими РГБ и передают информацию об этом по радиоканалу на приемное устройство, расположенное на летательном аппарате или поисковом корабле, при этом выставленные буи контролируются кораблем, который находится от линии буев на заданном расстоянии с включенной шумопеленгаторной станцией, периодически с заданным интервалом или в назначенное время выстреливают с корабля в расчетную точку в качестве взрывного источника звука (ВИЗ) реактивную глубинную бомбу, погружают ее на заданную глубину и подрывают, принимают корабельной шумопеленгаторной станцией и РГБ звуковую волну от подводного взрыва, местонахождение которого известно, и волну, отражаемую корпусом подводной лодки, по времени прихода сигналов на приемные устройства и их направлению рассчитывают координаты подводной лодки – цели, отличающийся тем, что в качестве единственного поискового средства и одновременно средства нейтрализации применяется безэкипажный катер (БЭК), управляемый с берегового центра управления (БЦУ), для проведения поисковой операции БЭК выдвигается на рубеж постановки РГБ, в точке с известными координатами выставляется РГБ №1, в точке с известными координатами выставляется РГБ №2, в точке с известными координатами выставляется РГБ №3, в точке с известными координатами выставляется РГБ №4, РГБ выставляются на расстоянии не более двух радиусов максимальной зоны обнаружения в целях обеспечения перекрытия площади обнаружения смежными буями, все РГБ приводятся в рабочее положение, после чего в заданное время БЭК ложится в дрейф с выключенными двигателями, получая питание от бортовой аккумуляторной батареи, подводный объект двигается через линию РГБ неизвестными курсом и скоростью, РГБ №2 первым принимает акустический шум подводного объекта во время Т6, так как он ближе находится к подводному объекту, далее РГБ №2 направляет во время Т7 полученные сигналы по радиопередающему тракту на БЭК, после чего БЭК во время Т8 транслирует полученную информацию на БЦУ, который, обработав полученные сигналы, во время Т9 выдает команду на БЭК на вылет квадрокоптера 3 в точку с заданными координатами и сброс ВИЗ, далее РГБ №2 принимает прямой акустический шум от взрыва ВИЗ первым во время Т11, РГБ №1 принимает прямой акустический шум от взрыва ВИЗ вторым во время Т12, при этом разница во времени приема акустических сигналов обусловлена разной удаленностью РГБ от ВИЗ, РГБ №2 направляет полученный сигнал на БЭК по радиоканалу связи РГБ – БЭК во время Т13, а РГБ №1 во время Т14, затем БЭК передает полученные РГБ прямые сигналы ВИЗ на БЦУ (Т15, Т16) по радиоканалу связи БЭК – БЦУ, далее РГБ №1 и 2 принимают отраженные акустические сигналы от подводного объекта (Т17, Т18), и направляют полученные отраженные сигналы на БЭК 1 (время Т19, Т20), которые перенаправляются в БЦУ для дальнейшей обработки полученных сигналов, и вычисления параметров движения подводного объекта (время Т21, Т22), считая, что подводный объект двигается на охраняемую территорию, зная уровень мощности прямого и отраженного сигналов, принятых разными РГБ, разницу во времени приема этих сигналов, скорость звука в воде в данной акватории, можно рассчитать примерный курс и примерное направление движения подводного объекта, БЭК оснащен посадочной площадкой с квадрокоптером и пусковыми устройствами, каждое из которых снабжено некоторым количеством РГБ, которые поочередно сбрасываются в воду в точках с заданными координатами по команде БЦУ, при этом координаты выставленных буев известны с высокой точностью, так как БЭК оснащен спутниковой системой навигации, данные от которой наносятся на электронную карту планшета тактической обстановки на БЦУ.
2. Способ освещения подводной обстановки и нейтрализации обнаруженных объектов по п. 1, отличающийся тем, что БЭК оснащен системой радиосвязи, которая получает данные от каждого РГБ, обрабатывает эти данные, определяет координаты подводной цели и передает информацию на БЦУ.
3. Способ освещения подводной обстановки и нейтрализации обнаруженных объектов по п. 1, отличающийся тем, что РГБ имеет более простую конструкцию, так как в нем отсутствует парашютная система.
4. Способ освещения подводной обстановки и нейтрализации обнаруженных объектов по п. 1, отличающийся тем, что на БЦУ находится командный пункт по поиску, обнаружению и нейтрализации подводной цели, обнаруженная цель может быть нейтрализована малогабаритной глубинной бомбой, сбрасываемой с квадрокоптера.
5. Способ освещения подводной обстановки и нейтрализации обнаруженных объектов по п. 1, отличающийся тем, что в качестве ВИЗ используется малогабаритный боеприпас, сбрасываемый с квадрокоптера.
6. Способ освещения подводной обстановки и нейтрализации обнаруженных объектов по п. 1, отличающийся тем, что в качестве средства нейтрализации обнаруженной подводной цели применяется малогабаритная глубинная бомба.
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| Устройство для электрохимической очистки сточных вод от шестивалентного хрома | 1980 |
|
SU893885A1 |
| CN 104215988 B, 24.08.2016 | |||
| CN 108267719 A, 10.07.2018. | |||

