Описываемое изобретение относится к способам мониторинга подводной обстановки.
Известен способ охраны водного района с применением автономного необитаемого подводного аппарата (АНПА), принятый за прототип изобретения [1 - Способ охраны водного района. Патент на изобретение RU 2668494. Авторы: В.И. Поленин, А.В. Новиков, А.А. Потехин. М: ФИПС, 2018. Бюл. № 28]. Он включает первичное обнаружение космическим или летательным аппаратом посторонних подвижных подводных объектов в охраняемом районе, передачу информации об этом на командный пункт, нацеливание дежурившего в районе АНПА на перехват обнаруженных объектов для их вторичного обнаружения, опознавания и возможной атаки.
Недостатком прототипа является малая поисковая производительность автономных необитаемых подводных аппаратов, дальность действия бортовых средств обнаружения которых не обеспечивает требуемой вероятности вторичного обнаружения цели, когда дистанция до обнаруженного объекта и сектор его вероятных курсов многократно превышают дальность действия используемых поисковых средств.
Известна мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории, рассматриваемая в качестве аналога изобретения. Она включает безэкипажный катер (БЭК) с опускаемым гидролокатором, системой автономного дистанционного управления, средствами хранения информации и космической навигации [2 - Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории. Патент на изобретение RU 2639000. Авторы: Д.А. Белов, Д.А. Зайченко, А.А. Пенкин, А.Б. Чуриков. М: ФИПС, 2017. Бюл. № 35]. Поисковая производительность указанной мобильной мониторинговой системы определяется дальностью действия гидролокатора и скоростью обследования им акватории, и в случае, когда дистанция до обнаруженного объекта и сектор его вероятных курсов многократно превышают дальность действия гидролокатора БЭК, то обнаружение цели безэкипажным катером маловероятно, что и составляет главный недостаток мобильной надводной роботизированной системы.
Целью изобретения является разработка способа мониторинга подводной обстановки в морском районе, обеспечивающего необходимую поисковую производительность самоходного поискового аппарата для вторичного обнаружения ранее обнаруженного другими средствами подвижного подводного объекта, в том числе для случаев, когда сектор вероятных курсов объекта превышает дальность действия имеющихся у самоходного поискового аппарата поисковых средств.
Поставленная цель достигается тем, что предлагается способ мониторинга подводной обстановки в морском районе, при котором космическим или летательным аппаратом или стационарным средством наблюдения обнаруживают в заданном районе или прилегающей к нему области посторонний подвижный подводный объект, передают информацию об этом на пункт управления, по команде с которого направляют находящийся в районе самоходный аппарат с гидролокатором на перехват объекта и его обнаружение, обследуют подводное пространство бортовым гидролокатором, обнаруживают цель и сообщают об этом на пункт управления, отличающийся тем, что применяют безэкипажный катер, который дополнительно оборудуют радиогидроакустическими буями и устройством их постановки, рассчитывают траекторию катера для постановки заградительного барьера буев в секторе вероятных курсов подвижного подводного объекта, определяют интервал сброса и число сбрасываемых буев, в расчетных точках сбрасывают буи и направляют катер к медиане сектора в точку, находящуюся позади барьера на дальности действия гидролокатора, с обнаружением цели передают информацию о ней на пункт управления и осуществляют наблюдение за целью с помощью радиогидроакустических буев и бортового гидролокатора, при потере контакта с объектом передают информацию на пункт управления и по команде с него осуществляют повторный поиск.
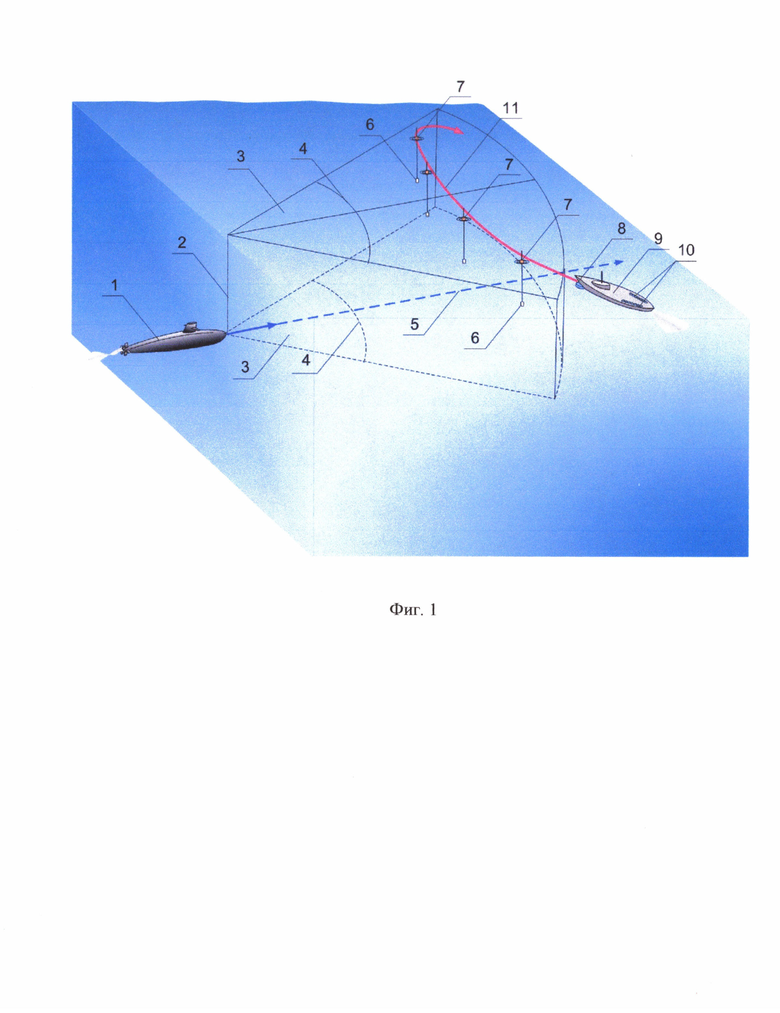
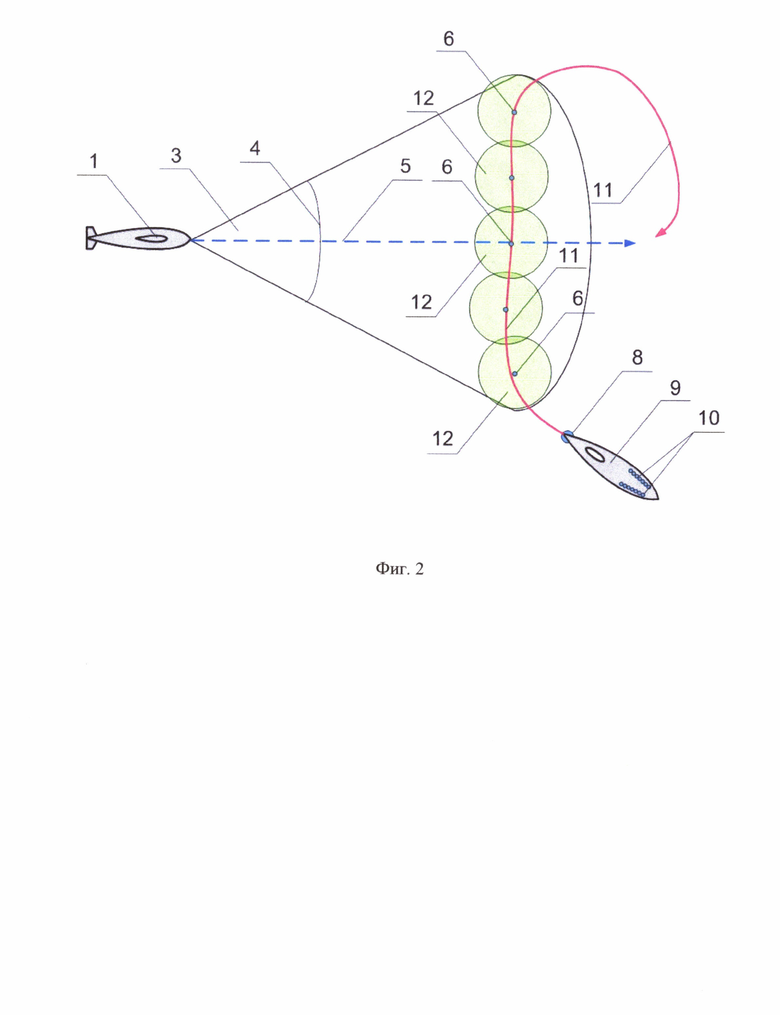
Реализация предлагаемого способа мониторинга подводной обстановки в морском районе показана на фиг. 1 и 2. Цифрами обозначены: 1 - подвижный подводный объект; 2 - глубина погружения подвижного подводного объекта; 3 - сектор вероятных курсов подвижного подводного объекта; 4 - угол при вершине сектора вероятных курсов подвижного подводного объекта; 5 - вероятный курс подвижного подводного объекта; 6 - гидрофон (приемо-излучатель) радиогидроакустического буя (РГБ); 7 - поплавок с антенной РГБ; 8 - гидролокатор БЭК; 9 - БЭК; 10 - радиогидроакустические буи с устройством их постановки; 11 - траектория движения БЭК; 12 - область обнаружения подвижного подводного объекта радиогидроакустическим буем (дальность действия РГБ).
Для реализации предлагаемого способа мониторинга подводной обстановки в морском районе выполняют следующие действия:
- обнаруживают космическим или летательным аппаратом, или стационарным средством наблюдения подвижный подводный объект (1);
- передают информацию об этом на пункт управления;
- определяют сектор (3) вероятных курсов обнаруженного подвижного подводного объекта (1) и угол (4) при его вершине;
- рассчитывают курс и скорость находящегося в районе безэкипажного катера (9) для следования в точку начала поиска обнаруженного подвижного подводного объекта (1);
- рассчитывают траекторию (11) БЭК (9) для постановки заградительного барьера РГБ в секторе (3) вероятных курсов подвижного подводного объекта (1), интервал сброса РГБ с учетом дальности их действия (12) и число РГБ в барьере (фиг. 1 и 2);
- в расчетных точках сбрасывают буи и направляют БЭК к медиане сектора в точку, находящуюся позади барьера на дальности действия гидролокатора (8) для ожидания момента обнаружения цели заградительным барьером;
- обследуют подводное пространство гидрофонами (приемо-излучателями) РГБ заградительного барьера с целью обнаружения подвижного подводного объекта;
- с обнаружением подвижного подводного объекта передают информацию на пункт управления, осуществляют наблюдение за объектом с помощью радиогидроакустических буев и бортового гидролокатора БЭК;
- при потере контакта с объектом передают информацию на пункт управления и по команде с него осуществляют повторный поиск.
Техническим результатом предполагаемого изобретения является способ мониторинга подводной обстановки в морском районе, обеспечивающий необходимую поисковую производительность самоходного поискового аппарата, применяемого для вторичного обнаружения ранее обнаруженного другими средствами подвижного подводного объекта, когда сектор вероятных курсов объекта превышает дальность действия поисковых средств, имеющихся у самоходного поискового аппарата.
Источники информации, использованные при выявлении изобретения и составлении его описания
1. Способ охраны водного района. Патент на изобретение RU 2668494. Авторы: В.И. Поленин, А.В. Новиков, А.А. Потехин. М.: ФИПС, 2018. Бюл. № 28.
2. Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории. Патент на изобретение RU 2639000. Авторы: Д.А. Белов, Д.А. Зайченко, А.А. Пенкин, А.Б. Чуриков. М.: ФИПС, 2017. Бюл. № 35.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
| Мобильная система мониторинга подводной акватории | 2022 |
|
RU2796093C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2021 |
|
RU2769559C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| РЕАКТИВНЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2021 |
|
RU2788510C2 |
Описываемое изобретение относится к способам мониторинга подводной обстановки. Для мониторинга подводной обстановки в морском районе, при котором космическим или летательным аппаратом или стационарным средством наблюдения обнаруживают в заданном районе или прилегающей к нему области посторонний подвижный подводный объект, передают информацию об этом на пункт управления, по команде с которого направляют находящийся в районе самоходный аппарат с гидролокатором на перехват объекта и его обнаружение, обследуют подводное пространство бортовым гидролокатором, обнаруживают цель и сообщают об этом на пункт управления, отличающегося тем, что применяют безэкипажный катер, который дополнительно оборудуют радиогидроакустическими буями и устройством их постановки, рассчитывают траекторию катера для постановки заградительного барьера буев в секторе вероятных курсов подвижного подводного объекта, определяют интервал сброса и число сбрасываемых буев, в расчетных точках сбрасывают буи и направляют катер к медиане сектора в точку, находящуюся позади барьера на дальности действия гидролокатора, с обнаружением цели передают информацию о ней на пункт управления и осуществляют наблюдение за целью с помощью радиогидроакустических буев и бортового гидролокатора, при потере контакта с объектом передают информацию на пункт управления и по команде с него осуществляют повторный поиск. Достигается поисковая производительность самоходного поискового аппарата, применяемого для вторичного обнаружения ранее обнаруженного другими средствами подвижного подводного объекта, когда сектор вероятных курсов объекта превышает дальность действия поисковых средств, имеющихся у самоходного поискового аппарата. 2 ил.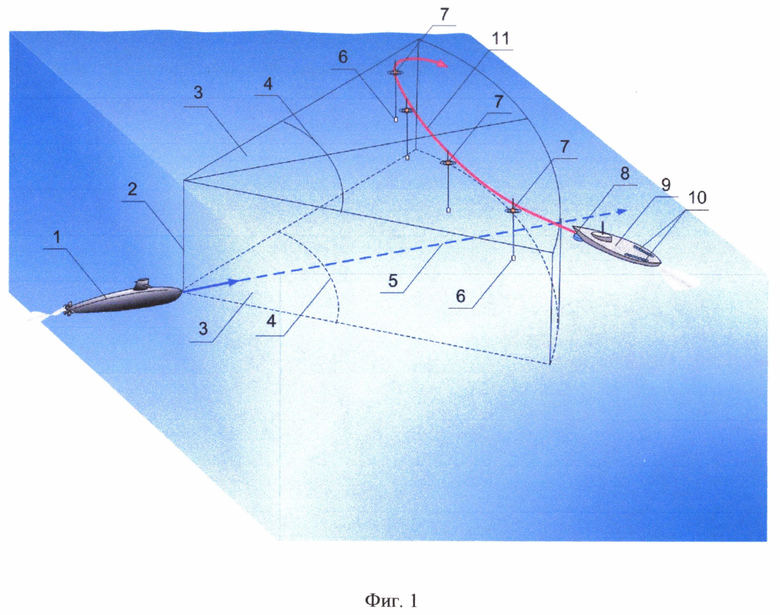
Способ мониторинга подводной обстановки в морском районе, при котором космическим или летательным аппаратом или стационарным средством наблюдения обнаруживают в заданном районе или прилегающей к нему области посторонний подвижный подводный объект, передают информацию об этом на пункт управления, по команде с которого направляют находящийся в районе самоходный аппарат с гидролокатором на перехват объекта и его обнаружение, обследуют подводное пространство бортовым гидролокатором, обнаруживают цель и сообщают об этом на пункт управления, отличающийся тем, что применяют безэкипажный катер, который дополнительно оборудуют радиогидроакустическими буями и устройством их постановки, рассчитывают траекторию катера для постановки заградительного барьера буев в секторе вероятных курсов подвижного подводного объекта, определяют интервал сброса и число сбрасываемых буев, в расчетных точках сбрасывают буи и направляют катер к медиане сектора в точку, находящуюся позади барьера на дальности действия гидролокатора, с обнаружением цели передают информацию о ней на пункт управления и осуществляют наблюдение за целью с помощью радиогидроакустических буев и бортового гидролокатора, при потере контакта с объектом передают информацию на пункт управления и по команде с него осуществляют повторный поиск.
| МОБИЛЬНАЯ НАДВОДНАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ПРОВЕДЕНИЯ ОПЕРАЦИЙ ПО ОСВЕЩЕНИЮ ОБСТАНОВКИ И МОНИТОРИНГУ СОСТОЯНИЯ АКВАТОРИИ | 2016 |
|
RU2639000C1 |
| Безэкипажный катер - носитель сменной полезной нагрузки | 2021 |
|
RU2760797C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2016 |
|
RU2672827C2 |
| US 5341718 A1, 30.08.1994. | |||
