ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к автономным транспортным средствам, включая под этим выражением как так называемые автоматически управляемые транспортные средства (AGV), так и так называемые автономные мобильные роботы (AMR). Согласно общепринятому различию, AGV обычно требуют наличия инфраструктуры, например, в виде магнитных полос на полу или навигационных огней (маяков) для направления транспортного средства по заданному маршруту. Вместо этого AMR перемещаются с помощью навигационной системы и процессора, которые находятся на борту робота. AMR способны воспринимать среду, в которой они движутся, и принимать решения на основе того, что они воспринимают, и как они были запрограммированы, например, останавливаться, перезапускаться и маневрировать вокруг препятствий, с которыми они сталкиваются на своем пути.
Изобретение предназначено для любой категории автономных транспортных средств (таких как автоматически управляемое транспортное средство или автономный мобильный робот) описанного выше типа, в частности, для использования в промышленной среде. Более того, не исключено использование изобретения вне промышленной области.
Более конкретно, изобретение относится к автономному транспортному средству или автономному мобильному роботу такого типа, который содержит:
- опорную конструкцию,
- множество колес, на которых расположена указанная опорная конструкция,
- по меньшей мере один электродвигатель, расположенный на опорной конструкции, для активации по меньшей мере одного из указанных колес, и
- одну или более схем электронного контроля, расположенных на опорной конструкции.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства вышеуказанного типа известны и некоторое время используются в промышленности для различных целей. Например, в автомобильной промышленности с конца 1970-х годов (см., например, фиг. 3 документа GB 1 564 669 A, владельцем которого является тот же заявитель) известны сборочные предприятия для автомобилей, в которых конструкция автомобиля перевозилась на AGV через ряд сборочных станций, не обязательно расположенных в линию. В связи с экспоненциальным ростом в последние годы инвестиционных затрат, необходимых для производства новых транспортных средств, вышеупомянутые технологии стали вызывать все больший интерес, поскольку они позволяют, особенно в случае производства транспортных средств высокого класса, когда количество транспортных средств, подлежащих произведению в единицу времени, относительно невелико, отказаться от традиционной схемы большого поточного производственного предприятия и вместо этого использовать производственные предприятия с более компактной и более модульной компоновкой, легко реконфигурируемой в соответствии с новыми производственными потребностями и/или легко транспортируемой даже на другой объект, чтобы отвечать новым требованиям рынка.
В рамках этих разработок существует потребность в автономных транспортных средствах нового поколения, которые могут полностью удовлетворить эти потребности.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Таким образом, задачей настоящего изобретения является создание автономного транспортного средства, которое может работать эффективно и надежно и в то же время имеет чрезвычайно простую и недорогую конструкцию.
Другой задачей изобретения является создание автономного транспортного средства, конструкция которого выполнена в соответствии с критериями модульности, чтобы его можно было легко адаптировать и/или реконфигурировать в соответствии с применением, для которого оно предназначено.
Дополнительной, более конкретной задачей изобретения является создание автономного транспортного средства, которое гарантирует безопасную и надежную транспортировку конструкций или компонентов, которые расположены на нем, в частности, гарантирует правильный и постоянный контакт всех колес транспортного средства с поверхностью, по которой движется транспортное средство без необходимости, однако, наличия в транспортном средстве сложных и дорогих систем подвески.
Дополнительной задачей изобретения является создание автономного транспортного средства, которое может быть конфигурировано так, чтобы не пересекаться с препятствиями, размещенными на его пути, например, путем проезда или преодоления препятствий.
Дополнительной задачей изобретения является создание автономного транспортного средства, которое также можно быстро преобразовать в конфигурацию уменьшенного размера для облегчения транспортировки.
Наконец, еще одной задачей изобретения является достижение всех вышеупомянутых задач с помощью простой и экономичной конструкции и сборочной структуры.
Раскрытие сущности изобретения
Для достижения одной или более из вышеупомянутых задач предложено настоящее изобретение, относящееся к транспортному средству типа, указанного выше в настоящем описании, отличающемуся тем, что:
- опорная конструкция имеет общую двухкорпусную конфигурацию с двумя отдельными корпусами, параллельными друг другу и разнесенными в поперечном направлении, и по меньшей мере две мостовые конструкции, соединяющие указанные корпуса друг с другом,
- транспортное средство содержит два передних колеса и двух задних колеса, расположенных около переднего и заднего концов двух корпусов,
- по меньшей мере две мостовые конструкции имеют концы, соединенные с двумя корпусами посредством размещения между ними упругих соединений,
- таким образом, что обеспечена возможность свободного выполнения двумя корпусами дифференцированных колебательных движений, позволяющим двум передним и двум задним колесам оставаться в контакте с поверхностью, по которой движется транспортное средство, даже если данная поверхность имеет неровности и/или изменения уклона.
Благодаря вышеуказанным характеристикам два корпуса, которые являются частью конструкции транспортного средства, способны совершать дифференцированные колебания, чтобы колеса могли следовать неровностям и изменениям наклона поверхности, по которой движется транспортное средство, причем сами корпуса конфигурированы так, чтобы следовать за профилем земли под действием силы тяжести или собственного веса, или, в любом случае, из-за веса оборудования, перевозимого транспортным средством. Вышеупомянутый результат достигается без необходимости связывать сложные (и, следовательно, дорогие) системы подвески с колесами транспортного средства.
В предпочтительном варианте осуществления передние колеса и задние колеса образуют часть колесных узлов, составляющих отдельные модули, жестко соединенные с передними и задними концами двух корпусов, с образованием части конструкции транспортного средства. Предпочтительно, два колесных узла содержат каждый направляющее и приводное колесо и включают в себя первый электродвигатель для приведения в движение колеса и второй электродвигатель для направления колеса. Каждый из двух других колесных узлов содержит неприводное поворотное колесо.
Опять же, в случае вышеупомянутого предпочтительного варианта осуществления каждый из двух корпусов имеет конструкцию из металлического материала, содержащую верхнюю стенку, нижнюю стенку и две боковые стенки. Предпочтительно, каждый корпус имеет одно или более защитных пространств, снабженных открываемыми дверями для вмещения одного или более электронных блоков обработки и управления и соответствующей проводки, а также одной или более электрических батарей для питания электродвигателей колес.
В соответствии с другой предпочтительной характеристикой изобретения указанные по меньшей мере две мостовые конструкции содержат первую поперечину и вторую поперечину, каждая из которых имеет трубчатый цилиндрический корпус с двумя противоположными концами, соединенными с двумя корпусами путем размещения между ними двух упругих соединений, каждое из которых включает кольцевой кожух из эластомерного материала, коаксиальный с цилиндрическим кожухом поперечины.
В соответствии с другой предпочтительной характеристикой указанные по меньшей мере две мостовые конструкции также содержат первую и вторую опорные пластины для инструмента, расположенные в горизонтальных плоскостях и имеющие каждая противоположный конец, опирающийся на опорные поверхности двух корпусов, и каждая из которых соединена с соответствующей опорной поверхностью путем размещения между ними одной или более упругих опор из эластомерного материала. В предпочтительном варианте осуществления, в котором каждый корпус имеет металлическую структуру, содержащую верхнюю стенку, нижнюю стенку и две боковые стенки, опорная поверхность каждой опорной пластины для инструмента на корпусе ограничивается нижней стенкой выемки, образованной на внутренней стороне корпуса и открытой как с внутренней, так и с верхней стороны корпуса.
«Базовая» конфигурация транспортного средства согласно изобретению, конечно, может быть снабжена оборудованием любого типа, которое делает его пригодным для конкретного применения. Например, на каждой опорной пластине может быть расположено подъемное устройство («подъемник») любого типа, выполненное с возможностью изменять высоту конструкции, расположенной над транспортным средством.
Предпочтительно два корпуса также содержат множество вспомогательных колес с множеством элементов качения типа, известного как «всенаправленное колесо».
Благодаря всем вышеперечисленным характеристикам, транспортное средство способно удовлетворить потребности в эффективной и надежной работе, и в частности необходимость обеспечения постоянного контакта всех колес транспортного средства с поверхностью, по которой оно движется, даже когда данная поверхность имеет неровности или изменения уклона, не требуя в то же время применения сложных, тяжелых и дорогих конструкций.
В дополнительном варианте осуществления две мостовые конструкции, образующие часть транспортного средства согласно изобретению, имеют форму двух портальных конструкций, каждая из которых включает две стойки, которые проходят вертикально вверх от двух корпусов и имеют верхние концы, соединенные поперечиной так, что пространство между двумя корпусами является полностью свободным, каждая стойка каждой портальной конструкции имеет нижний конец, соединенный с соответствующим корпусом опорной конструкции транспортного средства с помощью размещения между ними упругого шарнира.
Благодаря вышеупомянутым характеристикам в данном варианте осуществления транспортное средство согласно изобретению может проходить через рабочую станцию, не пересечения с оборудованием, размещенным на указанной станции, и может преодолевать препятствие путем расположения над ним.
Предпочтительно в данном варианте осуществления две поперечины двух портальных конструкций соединены друг с другом посредством верхней рамы.
В случае данного варианта осуществления «базовая» конфигурация транспортного средства также может быть снабжена оборудованием любого типа, которое делает его пригодным для конкретного применения. Исключительно в качестве примера на стойках обеих портальных конструкций могут быть установлены соответствующие скользящие элементы с возможностью вертикального скольжения, жестко соединенные друг с другом посредством межсоединительной конструкции. Данные скользящие элементы образуют вертикально перемещаемый аппарат, который, например, может быть опущен, когда транспортное средство находится в рабочем положении на сборочной станции промышленного предприятия, чтобы можно было выполнять операции на конструкции, переносимой данным вертикально перемещаемым аппаратом.
Согласно дополнительному варианту изобретения опорная конструкция может быть выполнена так, чтобы ее можно было складывать в неработающую конфигурацию уменьшенного размера, при этом два корпуса смежны друг с другом. Например, в конкретном случае последнего варианта осуществления, упомянутого выше, на каждой стойке каждой портальной конструкции шарнирно прикреплена вспомогательная стойка вокруг вертикальной оси, к которой присоединена верхняя поперечина портальной конструкции так, что транспортное средство может принимать конфигурацию уменьшенного размера, например, для облегчения транспортировки, в которой два корпуса смежны друг с другом, а две портальные конструкции расположены в наклонных плоскостях по отношению к плоскости, перпендикулярной продольному направлению корпусов.
В случае данного варианта осуществления, если предусмотрена верхняя рама, соединяющая две портальные конструкции, данная верхняя рама устанавливается съемным образом, так что ее можно снимать перед преобразованием транспортного средства в конфигурацию с ограниченным пространством.
Тем не менее, в случае данного последнего варианта осуществления на вспомогательных стойках обеих портальных конструкций соответствующие вертикально установлены скользящие элементы, соединенные друг с другом посредством межсоединительной балки, имеющей противоположные концы, шарнирно соединенные с двумя скользящими элементами вокруг вертикальной оси, таким образом, чтобы позволить транспортному средству принять упомянутую выше конфигурацию уменьшенного размера с двумя корпусами, смежными друг с другом, и двумя портальными конструкциями, расположенными в плоскостях, наклоненных по отношению к плоскостям, перпендикулярным продольному направлению корпусов.
Все вышеупомянутые характеристики позволяют трансформировать транспортное средство в конфигурацию уменьшенных размеров в очень короткие сроки, например, для подготовки к транспортировке на другую производственную площадку. И в этом случае, видно, что этот результат достигается исключительно простыми и недорогими средствами.
Базовая конфигурация транспортного средства согласно изобретению в версии с портальной структурой также может быть оснащена роботизированными руками, расположенными непосредственно или опосредовано на двух портальных конструкциях. Данный вариант может, например, использоваться на предприятии, содержащем сборочную линию, множество AGV, расположенных так, чтобы двигаться вдоль указанной линии и принимать на нее компоненты. Транспортное средство с роботизированными манипуляторами может быть размещено на сборочной линии и запрограммировано на сбор компонентов со стационарных позиций сбоку от конвейера и их укладку на AGV, которые движутся вдоль линии. Комбинация двух типов автономных транспортных средств позволяет оптимизировать эффективность, используя их соответствующие особенности.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Дополнительные признаки и преимущества изобретения станут очевидными из следующего ниже описания, данного со ссылкой на прилагаемые чертежи, предоставленные исключительно в качестве неограничивающего примера, на которых:
- фиг. 1 - вид в аксонометрии первого варианта осуществления транспортного средства согласно настоящему изобретению,
- фиг. 2 - дополнительный вид в аксонометрии транспортного средства с фиг. 1,
- фиг. 3 - вид сверху транспортного средства с фиг. 1 и 2,
- фиг. 4 - частичный вид в аксонометрии с частичным разрезом транспортного средства с фиг. 1-3;
- фиг. 5 - дополнительный частичный вид в аксонометрии с частичным разрезом транспортного средства с фиг. 1-3,
- фиг. 6, 7 - виды в аксонометрии транспортного средства с фиг. 1-3, иллюстрирующие защитные пространства, образованные внутри конструкции транспортного средства, с соответствующими дверями в открытом состоянии,
- фиг. 8 - вид в аксонометрии второго варианта осуществления транспортного средства согласно изобретению,
- фиг. 9 - частичный вид в аксонометрии с частичным разрезом транспортного средства с фиг. 8,
- фиг. 10 - вид в аксонометрии третьего варианта осуществления транспортного средства согласно изобретению.
- Фиг. 11 - вид в аксонометрии с частичным разрезом детали конструкции транспортного средства с фиг. 10,
- фиг. 12, 13 - дополнительные виды в аксонометрии, иллюстрирующие дополнительные детали транспортного средства с фиг. 10,
- фиг. 14A, 14B, 14C - транспортное средство с фиг. 10, в трех последовательных этапах операции, необходимой для преобразования транспортного средства в конфигурацию уменьшенного размера, пригодную для транспортировки,
- фиг. 15 - вид сверху транспортного средства с фиг. 10, в конфигурации уменьшенного размера;
- фиг. 16A, 16B - два вида в аксонометрии варианта осуществления узла приводного колеса, используемого в транспортном средстве согласно изобретению, и
- фиг. 17 - схематический вид в аксонометрии дополнительного варианта транспортного средства согласно изобретению.
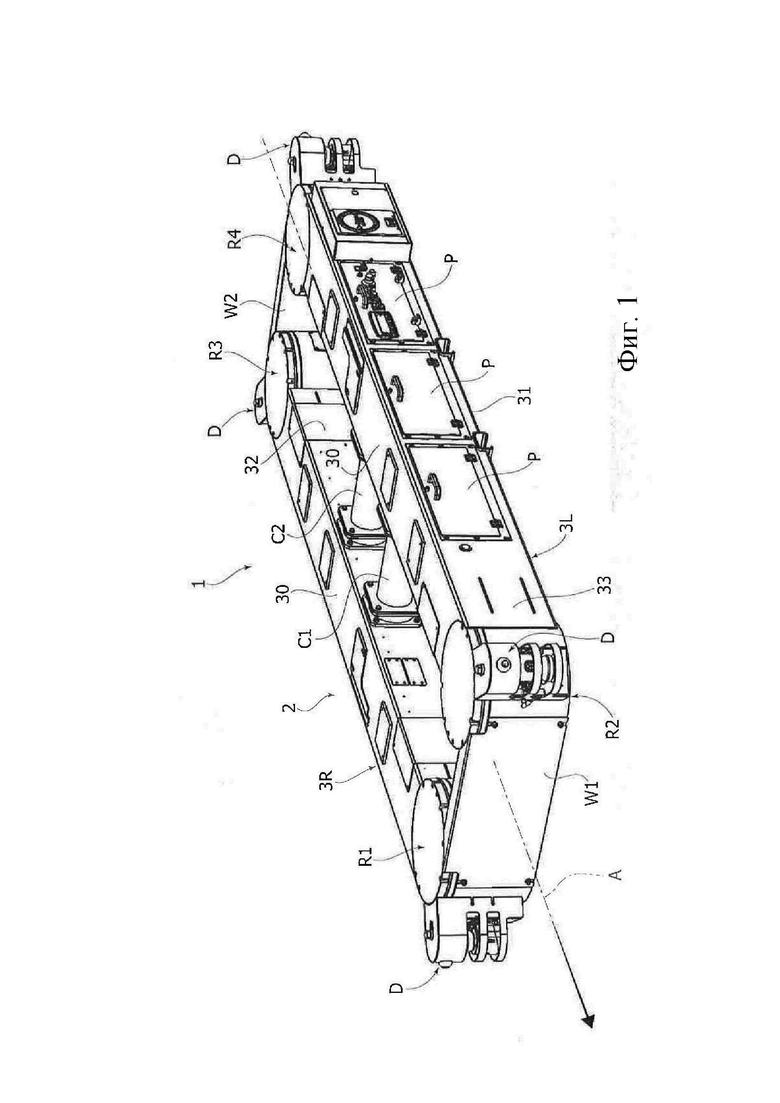
На фиг. 1-3 номером позиции 1 в целом обозначено автономное транспортное средство или автономный мобильный робот, который может использоваться на промышленном предприятии, в частности, на заводе по сборке автомобилей, для транспортировки конструкции автомобиля, например, кузов автомобиля или подузел кузова через одну или более сборочных станций, или для транспортировки, например, любого другого компонента или подузла автомобиля через одну или более станций обработки и сборки. Однако, как уже указывалось выше, следует понимать, что транспортное средство согласно изобретению имеет общее применение как в промышленной, так и в непромышленной области.
Транспортное средство 1 содержит опорную конструкцию 2, установленную на колесах, имеющую общую конфигурацию двойного корпуса, с двумя отдельными корпусами 3R, 3L, параллельными друг другу и разнесенными в поперечном направлении, и множество мостовых конструкций, которые соединяют указанные корпуса друг с другом,
В проиллюстрированных здесь решениях транспортное средство может двигаться в любом направлении и, в частности, как в продольном главном направлении А, так и в поперечном направлении, перпендикулярном основному направлению, будучи оснащенным приводными колесами, которые также могут направляться под углом 90 градусов, и поворотными неприводными колесами. В более общем смысле, в транспортном средстве с направляющими колесами, но не способном поворачиваться на 90 градусов, два корпуса 3L, 3R могут быть расположены в указанном выше основном направлении A продвижения (как показано на чертежах) или даже в поперечном направлении, перпендикулярно основному направлению продвижения.
В проиллюстрированных здесь вариантах осуществления каждый из корпусов 3R, 3L имеет конструкцию, состоящую из стальных стенок, сваренных и/или привинченных друг к другу, и имеет удлиненную конфигурацию с верхней стенкой 30, нижней стенкой 31, внутренней боковой стенкой 32 и внешней боковой стенкой 33.
На переднем и заднем концах двух корпусов 3R, 3L жестко присоединены четыре колесных узла R1, R2, R3, R4. Как видно на чертежах, каждый из указанных колесных узлов имеет кожух, имеющий общую цилиндрическую конфигурацию с вертикальной осью. Два из этих колесных узлов, например узлы R2, R3 по диагонали (но они могут быть двумя передними узлами или двумя задними узлами или двумя узлами, установленными на одном корпусе), удерживают направляющее и приводное колесо 500 (фиг. 16A, 16B), и каждый из них включает в себя первый электродвигатель M1 для приведения в движение колеса 500 и второй электродвигатель M2 для направления колеса.
Полный составной модуль каждого из узлов R1-R4 сам по себе коммерчески доступен и, взятый отдельно, не попадает в объем настоящего изобретения. Два других колесных узла, например узлы R1, R4, представляют собой только неприводное поворотное колесо и поэтому не имеют электродвигателей.
Транспортное средство может быть оборудовано системой автономного вождения любого известного типа. В зависимости от того, AGV это или AMR (различие см. в начале описания), инфраструктура может быть предоставлена, например, в виде магнитных полос на земле или навигационных огней (маяков) для направления транспортного средства по определенному маршруту, или в транспортном средстве могут быть предусмотрены бортовые навигационные системы и процессоры, способные воспринимать окружающую среду и, следовательно, управлять движением транспортного средства.
В проиллюстрированном примере каждый из вышеупомянутых модулей R1-R4 удерживает устройство D, которое является частью системы привода и управления транспортным средством, позволяющей транспортному средству двигаться по любой заранее определенной траектории на полу предприятия, в котором оно используется. Эти системы известны сами по себе и позволяют управлять движением транспортного средства, не требуя наличия направляющей для транспортного средства на полу предприятия, как это было в случае с AGV первого поколения. Например, системы направления и управления могут включать в себя, как само по себе известно специалистам в данной области техники, устройства излучения и приема лазерного луча, конфигурированные для взаимодействия с множеством стационарных отражателей, установленных на предприятии, чтобы служить полезными ссылками для направления транспортного средства через предприятие. Устройства D могут также включать в себя системы безопасности, включая датчики приближения и/или контактные датчики, чтобы блокировать движение транспортного средства вблизи любого препятствия.
Внутри конструкции корпусов 3R, 3L имеются защитные пространства для одного или более электронных блоков управления транспортным средством, для электрических батарей для питания электродвигателей транспортного средства, для соединительной проводки к электродвигателям и к системам направления и безопасности, которыми оснащено транспортное средство, а также для устройств беспроводной передачи и приема для соединения бортовой электроники транспортного средства с одним или более стационарных электронных контроллеров, предусмотренных в системе, или также с контроллерами в виде портативных компьютеров, для пример планшетов, которые могут использовать операторы предприятия.
Вышеупомянутые защитные пространства доступны через открываемые двери P, как хорошо видно на фиг. 1, 2 и 6, 7.
Как показано на фиг. 1-3, конструкции двух корпусов 3R, 3L соединены друг с другом посредством двух центральных поперечин C1, C2, имеющих цилиндрический трубчатый корпус с противоположными концами, соединенными с двумя корпусами 3R, 3L путем размещения между ними упругих шарниров.
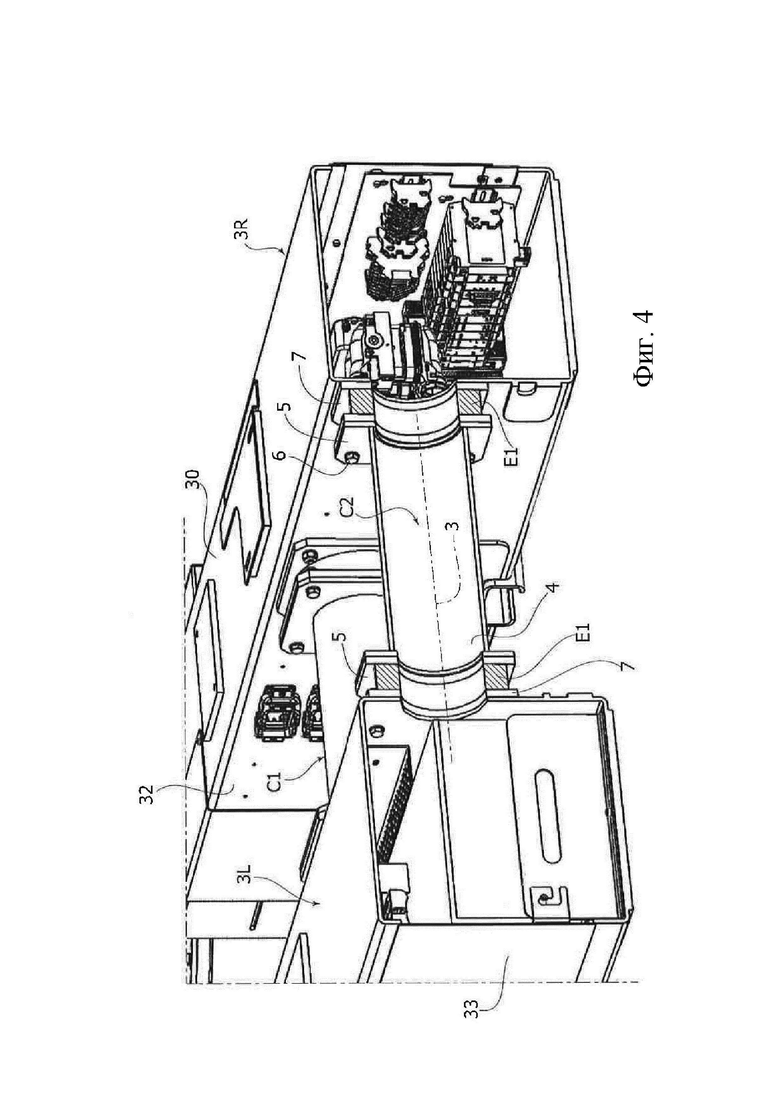
Как лучше всего видно на фиг. 4, каждая из двух поперечин C1, C2 имеет цилиндрический и трубчатый металлический корпус, ось B которого направлена поперечно и перпендикулярно относительно продольного направления A транспортного средства. Каждый конец цилиндрического корпуса 4 приварен к фланцу 5 в виде пластины, перпендикулярном оси B. Фланец 5 соединен болтами 6 (снова см. фиг. 4) с контрпластиной 7, приваренной к конструкции соответствующего корпуса 3R или 3L. Между фланцами 5, 7 размещен кольцевой кожух из эластомерного материала E1.
Комплект из двух пластин 5, 7 с упругим кольцевым кожухом E1 составляет упругий шарнир, способный упруго деформироваться как относительно соответствующих перемещений пластин 5, 7, соответствующих кручению вокруг оси B, так и относительного движений в направлении оси В или в направлении, перпендикулярном ей. Таким образом, упругая податливость такова, чтобы иметь податливости в предпочтительных направлениях, чтобы сделать транспортное средство адаптивным только в требуемых направлениях и, в то же время, достаточно жестким в направлениях, в которых должна сохраняться общая геометрия транспортного средства.
Благодаря вышеупомянутым характеристикам поперечины C1, C2 соединяют два корпуса 3R, 3L вместе, оставляя их, тем не менее, свободными для дифференцированных колебаний, которые позволяют транспортному средству оставаться всеми четырьмя колесами в контакте с полом предприятия, даже если этот пол имеет неровности и/или изменения уклона. Во время использования конструкция транспортного средства 1 вынуждена, за счет собственного веса и/или дополнительного веса оборудования, перевозимого на транспортном средстве, следовать профилю поверхности, по которой движется транспортное средство, с сохранением всех колес в контакте с данной поверхностью, благодаря возможности дифференцированных колебаний двух корпусов 3R, 3L, которая обеспечивается поперечинами C1, C2, а также дополнительными соединительными элементами, которые описаны ниже.
В частности, как показано на фиг. 3 и 5, конструкции двух корпусов 3R, 3L также соединены друг с другом двумя опорными пластинами L1, L2 для инструмента. Пластины L1, L2 представляют собой стальные пластины, расположенные в горизонтальной плоскости непосредственно над плоскостью, ограниченной нижними стенками 31 двух корпусов 3R, 3L.
Как видно на фиг. 5, для пластины L2 каждый из концов каждой из пластин L1, L2 проходит во внутреннее пространство соответствующего корпуса 3R или 3L за внутреннюю стенку 32 и фиксируется болтами 8 (фиг. 5) к нижней стенке 31 корпуса путем размещения между ними блоков из эластомерного материала E2.
Как указано выше, пластины L1, L2 могут использоваться для удерживания компонентов и/или инструментов, которыми может быть оснащено транспортное средство, а также для поддерживания частей, которые необходимо транспортировать на самом транспортном средстве.
В частности, каждая из пластин L1, L2 может использоваться для установки подъемного устройства любого известного типа (например, жидкостного цилиндра с вертикальной осью или подъемного устройства с пантографом), что позволяет изменять положение конструкции, удерживаемой на транспортном средстве, по высоте. Опущенное положение пластин L1, L2 относительно плоскости верхних стенок 30 двух корпусов 3R, 3L позволяет данным подъемным устройствам не выступать или лишь немного выступать над плоскостью стен 30, когда они находятся в полностью сниженной конфигурации.
Возвращаясь к упругим опорам E2, которые соединяют концы пластин L1, L2 с двумя корпусами 3R, 3L, данные упругие опоры также оставляют некоторую возможность относительного перемещения корпусов, гарантируя правильную работу транспортного средства, с сохранением контакта всех колес транспортного средства с полом, даже если последний имеет неровности и/или изменения наклона, не требуя, однако, конструктивного усложнения и, в частности, не требуя принятия особо сложных систем подвески в сочетании с колесами транспортного средства. Таким образом, результатом вышеизложенного является чрезвычайно простая конструкция, которую можно изготовить и собрать за короткое время и с очень низкими производственными затратами.
Еще одним преимуществом описанной выше конструкции является то, что она построена в соответствии с критерием модульности, с использованием небольшого количества стандартизуемых компонентов и, следовательно, может быть легко и быстро реконфигурирована для адаптации к потребностям каждого конкретного применения. В частности, поперечные элементы C1, C2 и пластины L1, L2 могут быть заменены аналогичными компонентами разной длины для изменения поперечного размера транспортного средства в соответствии с конфигурацией и размерами конструкции, подлежащей транспортировке. Колесные узлы R1-R4 составляют такое же количество модулей, которые также можно легко заменить модулями разных типов, или которые могут быть собраны в соответствии с различными конфигурациями, например, чтобы обеспечить приводные колеса как на обоих передних концах, так и на обоих задних концах двух корпусов 3R, 3L. Одинаковые корпуса 3R и 3L могут быть заменены корпусами разной длины в зависимости от требований применения.
Как показано на фиг. 1, 2 и 3, конструкция транспортного средства, наконец, включает переднюю стенку W1 и заднюю стенку W2, которые соединяют колесные узлы R1, R2 и R3, R4 вместе. Стенки W1, W2 не имеют несущей функции и соединены с соответствующими колесными узлами с помощью гибких соединительных элементов любого известного типа (не показаны), стенки (которые также можно было бы полностью исключить) не препятствуют дифференцированным движениям двух корпусов 3Р, 3Л.
Предпочтительно два корпуса также содержат множество вспомогательных колес с множеством элементов качения типа «всенаправленного колеса» (не показаны).
На фиг. 8 показан второй вариант осуществления транспортного средства согласно изобретению. В данном варианте осуществления конструкция двух корпусов 3R, 3L, а также расположение колесных узлов R1-R4 на переднем и заднем концах двух корпусов остается неизменной. Однако в этом случае поперечины C1, C2, опорные пластины L1, L2 для инструмента, а также передняя и задняя стенки W1, W2 полностью исключаются; мостовые конструкции, соединяющие два корпуса 3R, 3L вместе, представляют собой две портальные конструкции G1, G2. Каждая из портальных конструкций G1, G2 содержит две вертикальные стойки UR, UL, которые проходят вертикально вверх, начиная с двух корпусов 3R, 3L в областях, смежных с передними концами и задними концами двух корпусов, соответственно. Верхние концы стоек UR, UL соединены поперечинами T1, T2. Кроме того, в показанном здесь предпочтительном варианте осуществления две верхние поперечины T1, T2 двух портальных конструкций G1, G2 жестко соединены друг с другом соединительной рамой T, которая - в показанном примере - включает продольную центральную балку 9 и две пары распорных балок 10, соединяющих центральную часть балки 9 с концевыми частями соответствующей поперечины Т1, Т2. Таким образом, две портальные конструкции G1, G2 вместе с верхней рамой T составляют единый жесткий каркас, удерживаемый двумя корпусами 3R, 3L. Преимущество такой компоновки состоит в том, что таким образом транспортное средство можно использовать на станции сборки или обработки без пересечения с препятствием, создаваемом конструкцией, находящейся на станции, с возможностью преодолевать это препятствие.
В случае данного варианта осуществления «базовая» конфигурация транспортного средства также может быть снабжена оборудованием любого типа, которое делает его пригодным для конкретного применения. В качестве примера, в проиллюстрированном здесь решении скользящий элемент S установлен с возможностью скольжения на стойках UR, UL каждой портальной конструкции G1, G2. В проиллюстрированном примере скользящий элемент S может приводиться в действие посредством системы винта и гайки, включая две гайки N, связанные со скользящим элементом S и зацепленные резьбовыми колоннами V, которые неподвижны в осевом направлении и приводятся во вращение соответствующими электродвигателями (не показаны). Приведение в действие электродвигателей вызывает вертикальное смещение скользящего элемента S. Опять же, в случае показанного здесь предпочтительного варианта осуществления два скользящих элемента S, связанных с двумя портальными конструкциями G1, G2, жестко соединены друг с другом посредством продольной балки B1.
Конструкция, состоящая из скользящих элементов S и балки B1, может использоваться для поддержки конструкции или компонента, которые затем могут быть опущены после остановки транспортного средства на сборочной станции, чтобы нести указанную конструкцию к указанному компоненту вблизи работающего оборудования.
В случае вариантов осуществления с фиг. 8 поддержание контакта всех колес транспортного средства с поверхностью, по которой движется транспортное средство, гарантируется возможностью того, что два корпуса 3R, 3L будут иметь уменьшенные дифференцированные движения. Этот результат также достигается в этом случае благодаря тому, что конструкции, составляющие мосты между двумя корпусами 3R, 3L, или, скорее, в этом случае две портальные конструкции G1, G2, соединены с корпусами посредством упругих соединений. В частности, как подробно показано на фиг. 9, каждая из стоек UR, UL имеет нижнюю концевую часть, которая прикреплена к соответствующему корпусу посредством размещения между ними блоков из эластомерного материала E3. Как показано на фиг.9, в проиллюстрированном примере варианта осуществления нижняя часть каждой вертикальной стойки UR, UL имеет горизонтальную часть 11, которая проходит над верхней стенкой 30 соответствующего корпуса, которая затем переходит в вертикальную часть 12, нижний конец которой приварен к горизонтальной пластине 13. Горизонтальная пластина 13 соединена болтами 14 с нижней стенкой 31 соответствующего корпуса путем размещения между ними упругих опор E3.
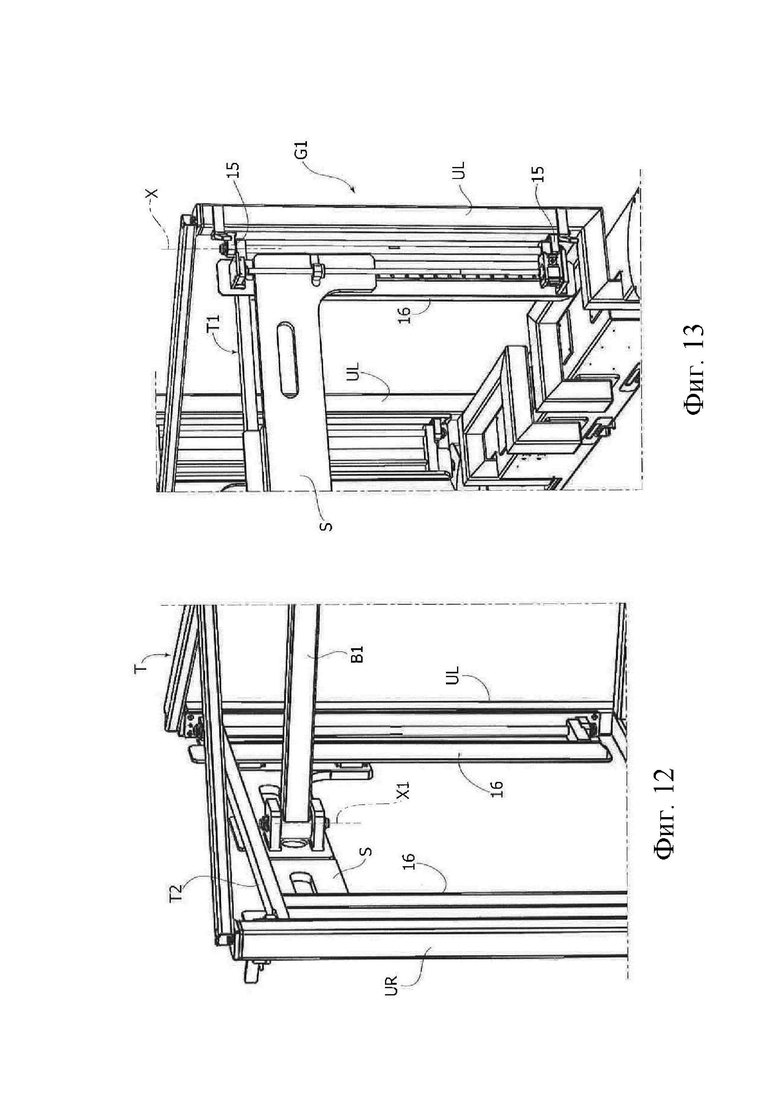
Фиг. 10-15 относятся к другому варианту осуществления, показанному на фиг. 8, в котором также можно преобразовать транспортное средство в конфигурацию уменьшенного размера, например, для облегчения транспортировки. На фиг. 14A, 14B, 14C показаны три последовательных этапа операции, посредством которых транспортное средство может быть сложено в конфигурацию уменьшенного размера, при этом два корпуса 3R, 3L расположены рядом друг с другом и смещены в продольном направлении. С этой целью, во-первых, предполагается, что верхняя рама Т съемно соединена с двумя портальными конструкциями G1, G2. В примере, показанном на фиг. 10, рама T состоит из двух балок, расположенных в форме X, концы которых съемно соединены с верхними концами стоек UR, UL двух портальных конструкций G1, G2. Съемное соединение может быть выполнено, например, с помощью болтов.
В случае данного варианта осуществления каждая из стоек UR, UL двух портальных конструкций G1, G2 имеет нижний конец, соединенный с соответствующим корпусом посредством упругих блоков E3 из эластомерного материала (фиг. 11), как уже было описано со ссылкой на вариант осуществления с фиг. 8 и 9. Однако в этом случае вспомогательная стойка 16 шарнирно соединена с каждой стойкой вокруг вертикальной оси X (см. фиг. 13) с помощью шарниров 15. В этом случае две поперечины T1, T2 двух портальных конструкций G1, G2 соединены с верхними концами двух вспомогательных стоек 16. Кроме того, скользящие элементы S установлены с возможностью скольжения на двух вспомогательных стойках 16 каждой портальной конструкции.
Опять же, в случае данного варианта осуществления балка B1, соединяющая два скользящих элемента S, шарнирно соединена с каждым скользящим элементом S вокруг вертикальной оси X1, как показано на фиг. 12.
Благодаря упомянутой выше конструкции и расположению вся конструкция транспортного средства может быть преобразована после того, как верхняя рама T будет снята, в сложенное состояние уменьшенного размера, которое проиллюстрировано на фиг. 14C, 15.
На фиг. 14A показан вид в аксонометрии транспортного средства в рабочей конфигурации использования. На фиг. 14B показано транспортное средство со снятой верхней рамой T. Фиг. 14C и 15 представляют собой вид в аксонометрии и вид сверху транспортного средства в сложенном состоянии, в котором два корпуса 3R, 3L смежны друг с другом в положении, смещенном в продольном направлении, а две портальные конструкции G1, G2 расположены в плоскостях, наклоненных по отношению к плоскости, перпендикулярной продольному направлению корпусов. Также следует отметить, что в конкретном примере, показанном на фиг. 10-15, соединение каждой из стоек UR, UL с соответствующим корпусом усилено горизонтальным рычагом 13, который проходит над верхней стенкой 30 соответствующего корпуса начиная с части 11 стойки (см. фиг. 11) и продолжая (см. фиг. 10) частью 14, перпендикулярной части 13 и расположенной поперечно над верхней стенкой 30, и вертикально направленной концевой частью 15, которая прикреплена к внутренней боковой стенке соответствующего корпуса.
Как ясно из вышеприведенного описания, вариант с фиг. 10-15 представляет, в дополнение ко всем преимуществам, которые были описаны выше со ссылкой на другие варианты осуществления изобретения, дополнительное преимущество выполнения операции транспортировки транспортного средства к другой производственной площадке чрезвычайно просто и быстро, поскольку можно сложить транспортное средство в конфигурацию с уменьшенным пространством без необходимости выполнять сложные операции по разборке.
Конечно, конфигурация, выбранная для обеспечения возможности сложения конструкции транспортного средства в уменьшенную общую конфигурацию с двумя корпусами в смежных положениях друг к другу, также может отличаться от проиллюстрированной, показанной здесь исключительно в качестве примера.
Как уже указано выше, какой бы ни была «базовая» конфигурация транспортного средства, она может быть реализована с дополнительным оборудованием в зависимости от конкретных потребностей каждого применения.
На фиг. 17 показан дополнительный пример, в котором базовая конструкция транспортного средства в конфигурации с портальными конструкциями, как раскрыто в описании к фиг. 8 и 10, укомплектована роботизированными манипуляторами 600. Роботизированные манипуляторы 600 представляют собой перевернутые роботы-манипуляторы любого известного типа, удерживаемые на надстройках, которые установлены на корпусах 3R, 3L и которые включают в себя две портальные конструкции G1, G2. В проиллюстрированном примере манипуляторы 600 поддерживаются продольными верхними балками T, соединяющими портальные конструкции G1, G2. Роботизированные манипуляторы 600 могут использоваться для захвата компонентов P с одного или более стационарных положений (например, с полок) сбоку от линии, а также для размещения собранных компонентов на поддонах, которые, в свою очередь, перемещаются с помощью AGV 700, которые проходят по сборочной линии L. Транспортное средство согласно изобретению размещается по обе стороны линии. Комбинация двух типов автономных транспортных средств (транспортное средство 1 с портальными конструкциями и транспортные средства 700) позволяет повысить эффективность, используя их соответствующие особенности.
Конечно, без ущерба для принципа изобретения, детали конструкции и варианты осуществления могут широко варьироваться по сравнению с описанными и проиллюстрированными исключительно в качестве примера, без выхода при этом за рамки объема правовой охраны настоящего изобретения.












Группа изобретений относится к области транспортного машиностроения. Автономное транспортное средство, такое как автоматически управляемое транспортное средство (AGV) или автономный мобильный робот (AMR), содержащее опорную конструкцию, множество колес, по меньшей мере один электродвигатель, расположенный на опорной конструкции, и одну или более схем электронного контроля, расположенных на опорной конструкции. При этом опорная конструкция имеет общую двухкорпусную конфигурацию, с двумя отдельными корпусами, параллельными друг другу и разнесенными в поперечном направлении, и по меньшей мере две мостовые конструкции, соединяющие указанные корпуса друг с другом. Множество колес включает два передних колеса и два задних колеса, расположенных около переднего и заднего концов двух корпусов. Установка, содержащая сборочную линию, множество AGV, предназначенных для движения вдоль указанной линии и приема на них компонентов, и по меньшей мере одно упомянутое автономное транспортное средство. Достигается повышение эффективности и надежности работы. 2 н. и 19 з.п. ф-лы, 20 ил.
1. Автономное транспортное средство, такое как автоматически управляемое транспортное средство (AGV) или автономный мобильный робот (AMR), содержащее:
- опорную конструкцию (2),
- множество колес, на которых расположена указанная опорная конструкция (2),
- по меньшей мере один электродвигатель, расположенный на опорной конструкции (2), для активации по меньшей мере одного из указанных колес,
и
- одну или более схем электронного контроля, расположенных на опорной конструкции (2),
указанное транспортное средство отличается тем, что:
- опорная конструкция имеет общую двухкорпусную конфигурацию, с двумя отдельными корпусами (3R, 3L), параллельными друг другу и разнесенными в поперечном направлении, и по меньшей мере две мостовые конструкции (C1, C2, L1, L2; G1, G2), соединяющие указанные корпуса (3R, 3L) друг с другом,
- указанное множество колес включает два передних колеса и два задних колеса, расположенных около переднего и заднего концов двух корпусов (3R, 3L), и
- указанные по меньшей мере две мостовые конструкции (C1, C2, L1, L2; G1, G2) имеют концы, соединенные с двумя корпусами посредством размещения между ними упругих соединений (E1, E2, E3),
- таким образом, что обеспечена возможность свободного выполнения двумя корпусами (3R, 3L) дифференцированных колебательных движений, позволяющих двум передним и двум задним колесам оставаться в контакте с указанной поверхностью, по которой движется транспортное средство, даже если данная поверхность имеет неровности и/или изменения уклона.
2. Автономное транспортное средство по п. 1, отличающееся тем, что указанные передние колеса и указанные задние колеса образуют часть колесных узлов, составляющих отдельные модули (R1, R2, R3, R4), жестко соединенные с передними и задними концами двух корпусов (3R, 3L).
3. Автономное транспортное средство по п. 1, отличающееся тем, что по меньшей мере два из указанных колесных узлов (R2, R3) содержат каждый направляющее и приводное колесо и включают в себя первый электродвигатель для приведения в движение колеса и второй электродвигатель для направления колеса.
4. Автономное транспортное средство по п. 3, отличающееся тем, что каждый из двух колесных узлов (R1, R4) содержит неприводное поворотное колесо.
5. Автономное транспортное средство по любому из пп. 1-4, отличающееся тем, что каждый из указанных корпусов (3R, 3L) имеет конструкцию из металлического материала, содержащую верхнюю стенку (30), нижнюю стенку (31) и две боковые стенки (32, 33).
6. Автономное транспортное средство по п. 5, отличающееся тем, что по меньшей мере один из корпусов (3R, 3L) имеет одно или более защитных пространств, снабженных открываемыми дверями (P) для вмещения одного или более электронных блоков обработки и управления, а также соответствующей проводки.
7. Автономное транспортное средство по п. 1, отличающееся тем, что указанные по меньшей мере две мостовые конструкции содержат первую поперечину (С1) и вторую поперечину (С2), имеющую цилиндрический трубчатый кожух (4), имеющий два противоположных конца, соединенных с двумя корпусам (3R, 3L) путем размещения между ними двух упругих соединений, каждое из которых включает кольцевой кожух из эластомерного материала (E1), коаксиальный с цилиндрическим кожухом (4) поперечины (C1, C2).
8. Автономное транспортное средство по п. 1 или 7, отличающееся тем, что указанные по меньшей мере две мостовые конструкции содержат первую и вторую опорные пластины (L1, L2) для инструмента, расположенные в горизонтальных плоскостях и имеющие каждая противоположный конец, опирающийся на опорные поверхности двух корпусов (3R, 3L), каждая из которых соединена с соответствующей опорной поверхностью путем размещения между ними одной или более упругих опор (E2) из эластомерного материала.
9. Автономное транспортное средство по п. 8, отличающееся тем, что каждый корпус (3R, 3L) имеет конструкцию из металлического материала, содержащую верхнюю стенку (30), нижнюю стенку (31) и две боковые стенки, и тем, что опорная поверхность каждой опорной пластины (L1, L2) для инструмента на корпусе ограничивается нижней стенкой (31) корпуса.
10. Автономное транспортное средство по п. 1, отличающееся тем, что над каждой опорной пластиной (L1, L2) для инструмента расположено подъемное устройство, конфигурированное для изменения положения по высоте конструкции, транспортируемой над транспортным средством.
11. Автономное транспортное средство по п. 1, отличающееся тем, что два корпуса (3R, 3L) содержат вспомогательные колеса с множеством элементов качения типа «всенаправленного колеса».
12. Автономное транспортное средство по п. 1, отличающееся тем, что две мостовые конструкции выполнены в виде двух портальных конструкций (G1, G2), каждая из которых включает две стойки (UR, UL), которые проходят вертикально вверх от двух корпусов (3R, 3L) и имеют верхние концы, соединенные поперечиной (T1, T2) так, что пространство между двумя корпусами (3R, 3L) является полностью свободным, каждая стойка (UR, UL) каждой портальной конструкции (G1, G2) имеет нижний конец, соединенный с соответствующим корпусом (3R, 3L) опорной конструкции (2) транспортного средства с помощью размещения между ними упругого шарнира (E3).
13. Автономное транспортное средство по п. 12, отличающееся тем, что две поперечины (T1, T2) двух портальных конструкций (G1, G2) соединены друг с другом посредством верхней рамы (T).
14. Автономное транспортное средство по п. 13, отличающееся тем, что на двух стойках (UR, UL) по меньшей мере одной из двух портальных конструкций (G1, G2) установлен скользящий элемент (S) с возможностью вертикального скольжения.
15. Автономное транспортное средство по п. 13, отличающееся тем, что на стойках (UR, UL) обеих портальных конструкций (G1, G2) установлены соответствующие скользящие элементы (S) с возможностью вертикального скольжения, жестко соединенные друг с другом конструкцией (B1) межсоединения.
16. Автономное транспортное средство по п. 1 или 12, отличающееся тем, что опорная конструкция (2) выполнена с возможностью складывания в нерабочую конфигурацию уменьшенного размера, в которой два смежных корпуса смежны друг с другом.
17. Автономное транспортное средство по п. 12, отличающееся тем, что на каждой стойке (UR, UL) каждой портальной конструкции (G1, G2) шарнирно прикреплена вспомогательная стойка (16) вокруг вертикальной оси (X), к которой установлена верхняя поперечина (T1, T2) портальной конструкции (G1, G2) так, что транспортное средство может принимать сложенную конфигурацию уменьшенного размера, в которой два корпуса (3R, 3L) смежны и смещены в продольном направлении друг от друга, и две портальные конструкции (G1, G2) расположены в наклонных плоскостях по отношению к плоскости, перпендикулярной продольному направлению корпусов.
18. Автономное транспортное средство по п. 17, отличающееся тем, что две поперечины (T1, T2) двух портальных конструкций (G1, G2) соединены друг с другом посредством верхней рамы (T), установленной съемным образом, так что рама (T) может быть снята перед преобразованием транспортного средства в сложенную конфигурацию уменьшенного размера.
19. Автономное транспортное средство по п. 17, отличающееся тем, что на вспомогательных стойках (16) обеих портальных конструкций (G1, G2) вертикально установлены соответствующие скользящие элементы (S), соединенные друг с другом посредством межсоединительной балки (B), имеющей противоположные концы, шарнирно соединенные с двумя скользящими элементами (S) вокруг вертикальных осей (X1).
20. Автономное транспортное средство по п. 12, отличающееся тем, что двумя портальными конструкциями (G1, G2) непосредственно или опосредованно поддерживаются роботизированные манипуляторы (600).
21. Установка, содержащая сборочную линию (L), множество AGV (700), предназначенных для движения вдоль указанной линии и приема на них компонентов, и по меньшей мере одно автономное транспортное средство (1) по п. 20, размещенное по обе стороны сборочной линии (L) и запрограммированное для захвата компонентов (P) с помощью указанных роботизированных манипуляторов (600) из одного или более стационарных положений сбоку от линии и для размещения захваченных компонентов (P) на AGV (700), которые передвигаются вдоль линии.
| US 4359116 A, 16.11.1982 | |||
| Система для передачи и приема дискретной информации | 1988 |
|
SU1564669A1 |
| АВТОМАТИЧЕСКАЯ МОДУЛЬНАЯ СИСТЕМА ДЛЯ ПЕРЕМЕЩЕНИЯ И ОБРАБОТКИ КУЗОВОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2265544C2 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО С ИСПОЛЬЗОВАНИЕМ ТЕЛЕЖКИ | 2008 |
|
RU2463193C2 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ И СПОСОБ СМЕНЫ ЗАЖИМНЫХ РАМ, НЕСУЩИХ КУЗОВНЫЕ ДЕТАЛИ, МЕЖДУ ПОДАЮЩИМ УСТРОЙСТВОМ ДЛЯ ЗАЖИМНЫХ РАМ И ТРАНСПОРТЕРОМ ДЛЯ РАМ С ИСПОЛЬЗОВАНИЕМ ПРИЕМНИКОВ ДЛЯ ЗАЖИМНЫХ РАМ | 2015 |
|
RU2674422C2 |

