Изобретение относится к области космической техники и может быть использовано при создании многоспутниковых систем, обеспечивающих дистанционное зондирование земли (ДЗЗ) с высокой разрешающей способностью и высокую периодичность возможности наблюдения любого объекта на поверхности планеты в большом диапазоне широт.
Известна ракетно-космическая система (РКС), включающая в себя ракету-носитель (РН) для доставки на орбиту выведения космических аппаратов (КА), размещенных в системе крепления и отделения от РН, каждый из которых имеет в своем составе корректирующую двигательную установку (КДУ) и средства разворота КА вокруг его центра инерции (патент РФ №2428358). Система крепления и отделения представляет собой адаптер конусообразной формы, установленный по продольной оси РН на переходнике РН и размещенные на нем устройства отделения (УО), на которые устанавливаются КА. При этом каждый из КА закреплен на УО плоскостью, параллельной продольной оси КА.
Функционирует система следующим образом. После выхода последней ступени РН на орбиту выведения производится отделение КА от УО. При этом КА двигаются под углом к продольной оси адаптера, что исключает соударение между КА в процессе их отделения. Затем каждый из КА ориентируется своими средствами разворота в требуемые положения и за счет работы КДУ переводится на рабочую орбиту. При этом формируется орбитальная структура из нескольких КА, выведенных РН. Описанная РКС позволяет обойтись без блока выведения, что снижает стоимость РКС. Это оправдано в том случае, когда расход топлива КДУ при доставке КА на рабочую орбиту достаточно мал, например, при развертывании орбитальной структуры из КА, размещенных в одной плоскости орбиты.
Однако возможности использования описанной РКС достаточно ограничены. Например, не представляется возможным использование в составе такой РКС КА для дистанционного зондирования Земли в видимом и (или) инфракрасном диапазоне с высокой разрешающей способностью по следующим причинам:
1. Использование адаптера конусообразной формы, размещенного по оси РН приводит к тому, что для размещения КА может быть использована кольцевая зона вокруг адаптера, снаружи ограниченная зоной полезного груза РН, что ограничивает поперечные размеры КА. В то же время, для получения информации высокого разрешения приходится использовать телескоп с весьма большим диаметром главного зеркала. Соответственно вся обеспечивающая аппаратура КА компонуется вокруг телескопа, что ведет к увеличению поперечных размеров КА. Поскольку телескоп имеет вытянутую форму, то в совокупности с использованием в составе КА КДУ, это ведет к увеличению продольных размеров К А. Все это ограничивает количество КА, которые можно разместить в зоне полезного груза РН. Разумеется можно использовать РН с большей зоной полезного груза, однако большей зоной будет обладать РН более высокой грузоподъемности и соответственно более высокой стоимости, что делает ее использование нецелесообразным.
2. Для КА снабженных телескопом большого диаметра и значительной длины, наиболее рациональной является компоновка при которой плоскость установки КА на УО перпендикулярна продольной оси телескопа, что обеспечивает оптимальное нагружение конструкции КА, а также его узлов и агрегатов в процессе наземной эксплуатации, например, при наземной транспортировке и при выведении на орбиту. Компоновка такого КА с размещением плоскости его установки параллельно его продольной оси приведет к нерациональному нагружению КА и его систем и агрегатов в условиях наземной эксплуатации и при выведению на орбиту, что приведет к увеличению массы КА. Это также ограничивает количество КА, которое может быть доставлено на орбиту одной РН. Кроме того такая конструкция менее технологична в изготовлении, а это приведет к увеличению стоимости изготовления КА.
3. Ограничение количества КА развернутых на рабочих орбитах сокращает диапазон широт, в котором может быть обеспечена высокая периодичность наблюдения любого объекта земной поверхности, даже при возможности разворота КА для наблюдения.
Известна РКС, включающая в себя ракету-носитель для доставки на орбиту блока выведения и космических аппаратов, имеющих плоскость крепления к УО перпендикулярную продольной оси КА и размещенных в системе крепления и отделения от блока выведения (патент РФ №2293689).
Система крепления и отделения представляет собой адаптер цилиндрической формы, на котором в кольцевой зоне размещены УО с закрепленными на них КА. При этом УО установлены так, что продольные оси КА находятся под некоторым углом к продольной оси РН. На адаптере, по его оси, совпадающей с продольной осью блока выведения, установлена подставка конической формы, на которой размещено УО с закрепленным на нем КА. При этом продольная ось этого КА совпадает с продольной осью блока выведения. Размещение КА на адаптере под некоторым углом к продольной оси блока выведения продиктовано необходимостью избежать соударения между КА и подставкой при отделении КА от УО на орбите.
РКС функционирует следующим образом. После доставки РН блока выведения с КА на орбиту выведения, происходит отделение блока выведения от РН, после чего блок выведения последовательно разводит КА на рабочие орбиты. После доставки каждого КА на его рабочую орбиту, производится его отделение от УО. По завершении доставки всех КА на их рабочие орбиты, блок выведения тормозится и сводится с орбиты искусственного спутника Земли.
Такой вариант построения РКС неэффективен для развертывания орбитальной структуры состоящей из группы КА ДЗЗ в видимом и (или) инфракрасном диапазоне с высокой разрешающей способностью из-за следующих факторов:
1. Размещение группы КА ДЗЗ в одной плоскости может обеспечить получение информации о любом объекте на земной поверхности в некотором диапазоне широт с некоторой периодичностью. Однако использование блока выведения в РКС, с группой КА в одной плоскости, представляется неоправданным. Использование блока выведения приводит к уменьшению зоны полезного груза РН, предназначенной для размещения КА, а значит ограничивает количество КА, которые возможно разместить в этой зоне. В то же время для поддержания орбитальной структуры КА в течение срока активного существования в его составе необходимо наличие КДУ и следовательно за счет увеличения запаса топлива в КДУ, использовав его, каждый из КА, переходя с орбиты выведения на рабочую орбиту, может занять свое место в орбитальной структуре. Необходимо также отметить, что использование блока выведения существенно увеличивает стоимость развертывания орбитальной группировки, поскольку стоимость блока выведения может достигать 30% от стоимости РН.
2. В данной РКС для размещения КА в зоне полезного груза РН используется подставка конической формы, для размещения КА по продольной оси блока выведения и кольцевая зона над адаптером вокруг подставки. На первый взгляд это позволяет разместить в зоне полезного груза больше КА. Однако наличие подставки делает проблематичным размещение в кольцевой зоне КА с аппаратурой ДЗЗ высокого разрешения из-за значительных поперечных размеров (аналогично рассмотренной выше РКС). Одновременно размещение КА в кольцевой зоне под углом к продольной оси блока выведения ограничивает длину КА.
Известна РКС дистанционного зондирования Земли в видимом и инфракрасном диапазоне наблюдения, включающая в себя РН для доставки на орбиту блока выведения и космических аппаратов имеющих плоскость крепления к УО перпендикулярную продольной оси КА и размещенных в системе крепления и отделения от блока выведения, каждый из которых имеет в своем составе оптико-электронную аппаратуру наблюдения, корректирующую двигательную установку и средства разворота КА относительно его центра инерции (сайт АО «Корпорация «ВНИИЭМ» www.vniiem.ru).
В данном случае речь идет о входящих в состав РКС двух КА «Канопус - В». КА оснащен оптико-электронной аппаратурой наблюдения в видимом и ближнем инфракрасном диапазонах наблюдения. Система крепления и отделения выполнена в виде установленного на блоке выведения адаптера, на котором закреплены УО с размещенными на них КА. При этом КА являются попутной нагрузкой к группе других КА, размещенных на блоке выведения.
РКС функционирует следующим образом. После доставки РН блока выведения с КА на орбиту выведения, происходит отделение блока выведения от РН, после чего блок выведения последовательно разводит КА на рабочие орбиты. После доставки каждого КА на его рабочую орбиту, производится его отделение от УО. При этом КА размещаются в одной плоскости на около круговой орбите под углом 180° друг относительно друга.
Эта РКС обладает следующими недостатками:
1. Использование зоны полезного груза для размещения блока выведения и других попутных нагрузок дает возможность разместить в ней только 2 КА ДЗЗ. При этом орбитальная структура состоящая из двух КА ДЗЗ даст возможность получать информацию о любом объекте на земной поверхности раз в сутки в узком диапазоне широт. Это ухудшает конкурентоспособность РКС, что приводит к уменьшению числа пользователей получаемой информации и следовательно к снижению экономической эффективности РКС.
2. Использование блока выведения приводит к увеличению затрат на развертывание орбитальной структуры КА.
Задачей, на решение которой направлено предлагаемое изобретение, являются минимизация времени развертывания орбитальной группировки КА ДЗЗ высокодетального разрешения, обеспечивающей высокую периодичность наблюдения любого объекта на поверхности планеты в большом диапазоне широт.
Поставленная задача решается тем, что система крепления и отделения выполнена в виде адаптера, на котором размещены несколько устройств отделения, с установленными на них КА, продольные оси которых параллельны продольной оси РН или близки к такому положению, устройства отделения выполнены с возможностью отделения КА под углом не менее 15° к продольной оси РН, а на адаптере между КА закреплены стойки, связанные с платформой, на которой зафиксировано устройство отделения КА, который установлен так, что его продольная ось параллельна продольной оси РН или близка к этому положению, устройство отделения выполнено с возможностью отделения установленного на ней КА в направлении продольной оси РН, корректирующие двигательные установки КА снабжены запасом топлива, обеспечивающим перевод КА после отделения от РН с орбиты выведения на рабочую орбиту с минимальной высотой Н, максимальный поперечный размер КА не превышает 0,6 диаметра D зоны полезного груза РН, максимальная высота КА не превышает D, размер апертуры оптико-электронной аппаратуры d может находиться в пределах от 0,11 D до 0,25 D, а средства разворота КА относительно его центра инерции обеспечивают возможность его разворота в плоскости, перпендикулярной плоскости орбиты на угол α, величина которого определяется выражением:
α≥arc sin R/(R+H)
где R - радиус Земли.
Суть изобретения иллюстрируется графическими материалами, где:
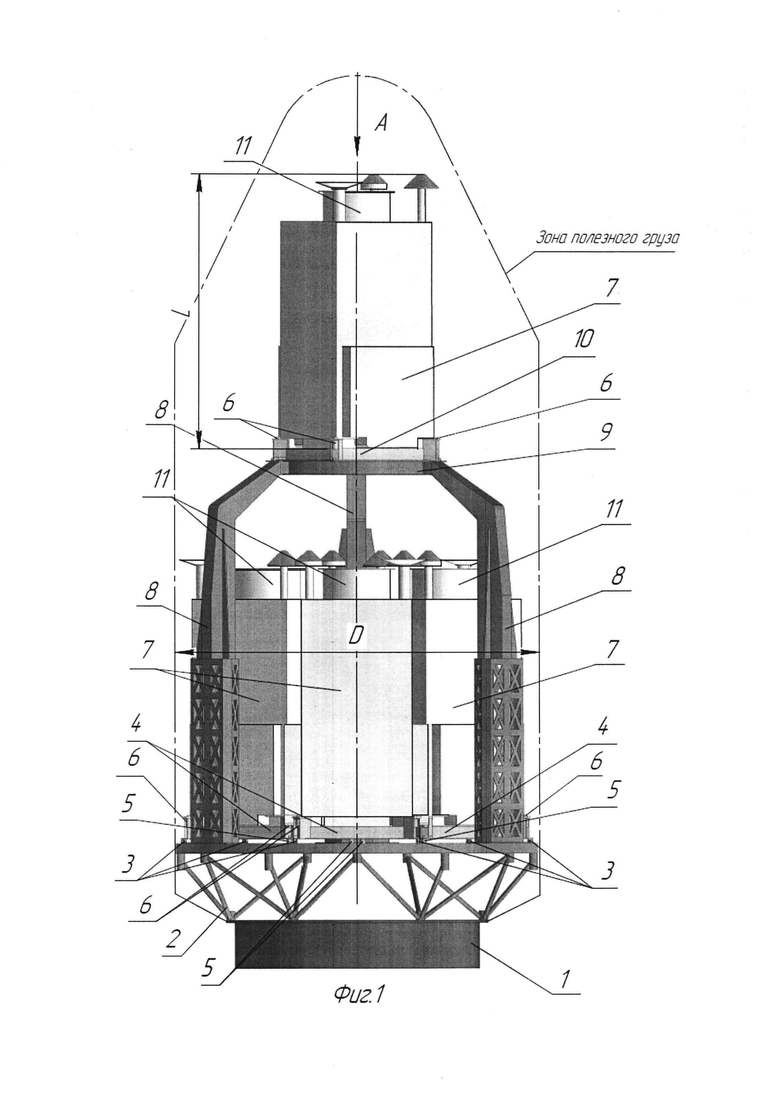
- на фиг. 1 изображена РКС в исходном состоянии;
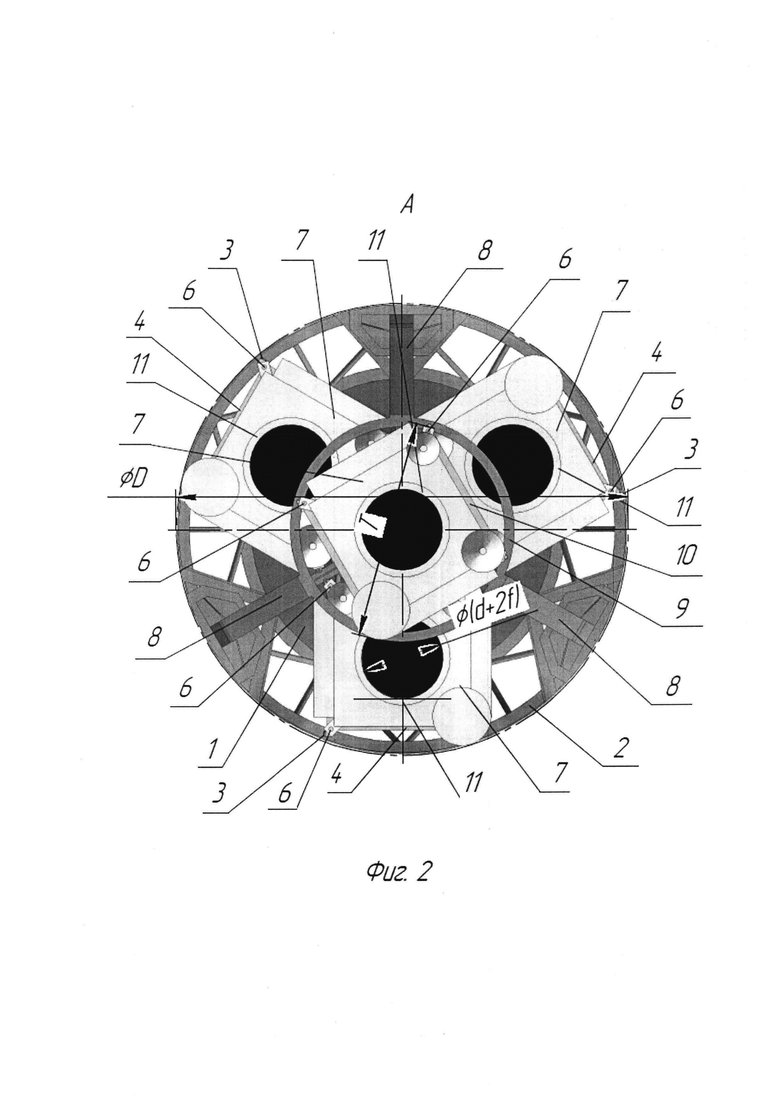
- на фиг. 2 изображен вид А на РКС с фиг. 1;
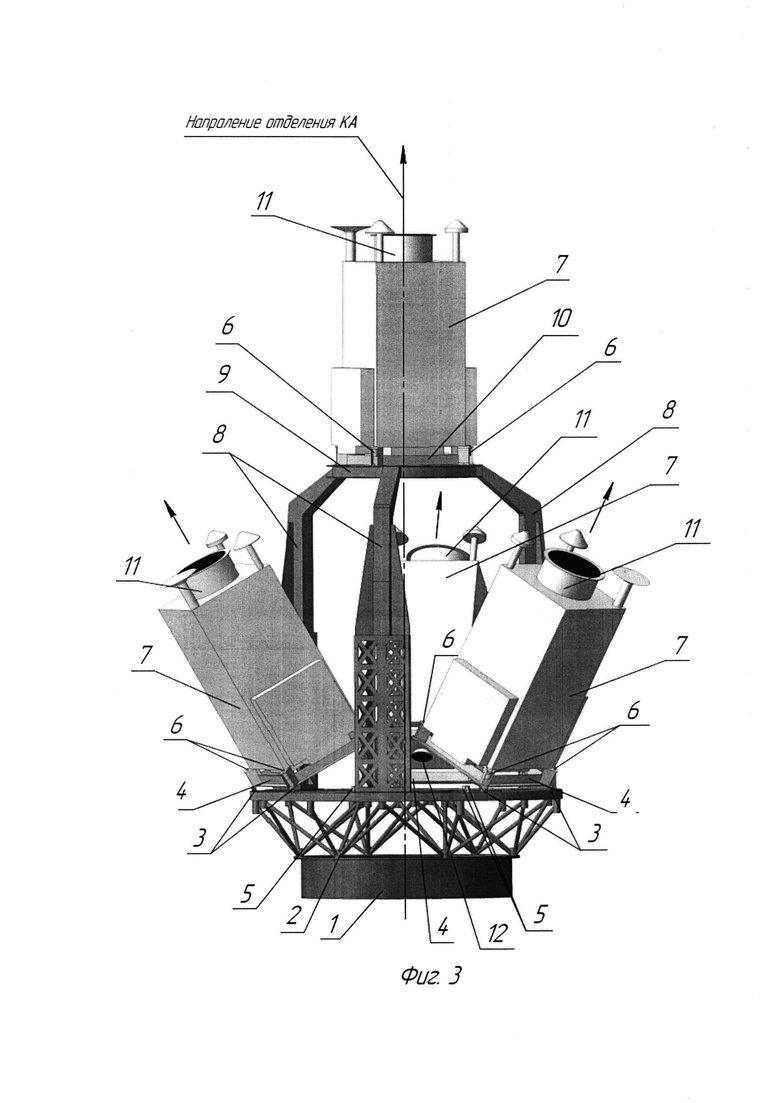
- на фиг. 3 изображена РКС в момент отделения КА от УО;
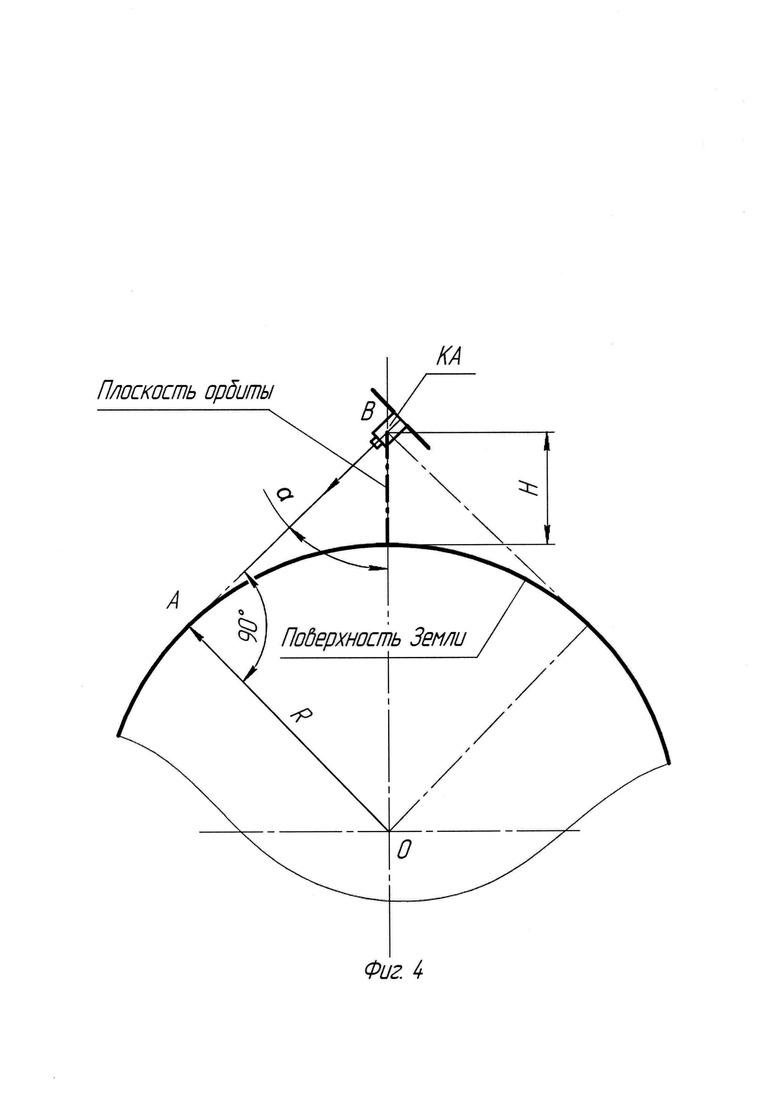
- на фиг. 4 изображена расчетная схема для определения величины угла α.
В исходном положении РКС находится на земной поверхности и включает в себя РН 1, установленную на РН 1 под обтекателем систему крепления и отделения, состоящую из адаптера 2, на котором размещены устройства отделения, каждое из которых включает в себя закрепленную в шарнирах 3 на адаптере 2 раму 4, зафиксированную относительно адаптера 2 замками 5 оснащенную замками фиксации 6 космического аппарата 7, толкателями и устройством разворота (толкатели и устройство разворота условно не показаны). В состав системы крепления и отделения входят также закрепленные на адаптере 2 стойки 8 и установленная на них платформа 9, на которой закреплено устройство отделения, включающее в себя зафиксированную на платформе 9 раму 10, оснащенную замками фиксации 6 космического аппарата 7 и толкателями (толкатели условно не показаны). Продольные оси космических аппаратов 7, размещенных на адаптере 2, параллельны продольной оси РН 1, а продольная ось космического аппарата 7, установленного на платформе 9, совпадает с продольной осью РН 1. Каждый из КА оснащен оптико-электронной аппаратурой 11, корректирующей двигательной установкой 12 и средствами разворота КА 7 в полете вокруг его центра инерции (эти средства выполнены в виде силовых гироскопов, размещенных внутри КА 7 и условно не показаны). Параметром D обозначен диаметр зоны полезного груза РН 1, параметром Т максимальный поперечный размер КА 7, параметром L его максимальная высота. Параметром d обозначен диаметр главного зеркала оптико-электронной аппаратуры 11, а параметром f зазор между диаметром d и диаметром входного отверстия оптико-электронной аппаратуры 11.
РКС функционирует следующим образом. После запуска РН, ее последняя ступень вместе с системой крепления и отделения, а также с размещенными в ней КА 7 доставляется на орбиту выведения. Затем из РН 1 выдается команда на замки 5, в результате срабатывания которых происходит расфиксация рам 4 устройств отделения, после чего устройства разворота поворачивают рамы 4 вместе с закрепленными на них КА 7 на требуемы угол и фиксируют в этом положении. После этого выдается команда на замки 6, которыми КА 7 крепятся к рамам 4 и раме 10, в результате чего происходит расфиксация КА 7 относительно рам 4 и рамы 10, вследствие чего под действием толкателей, входящих в состав УО происходит отделение КА 7 от рам 4 и рамы 10 с требуемой скоростью.
Затем каждый из КА 7 за счет работы КДУ переходит на свою рабочую орбиту, используя предназначенный для этого запас топлива. При этом все КА 7 размещаются в одной плоскости на около круговых орбитах с минимальной высотой Н, при равных углах между ними. После этого КА 7 начинают функционировать, проводя дистанционное зондирование Земли. Для обеспечения максимальной производительности КА 7, а также высокой периодичности наблюдения в большом диапазоне широт любых объектов на поверхности планеты группой КА 7 размещенных на орбите, каждый из КА 7 имеет возможность при помощи собственных средств разворота разворачиваться вокруг своего центра инерции в плоскости, перпендикулярной плоскости орбиты, для направления продольной оси КА 7 (оптической оси оптико-электронной аппаратуры) на требуемые районы. При этом угол разворот α, при котором обеспечивается возможность наблюдения за максимальным количеством районов определяется выражением α=arc sin R/(R+Н), а его величина определяется из прямоугольного треугольника ОАВ (фиг. 4), где АВ направлен по касательной к поверхности Земли.
В процессе функционирования КА 7 при помощи КДУ 12 производится подержание требуемой высоты орбиты и сохранение заданных углов между КА 7 в плоскости орбиты.
Проведение проектирования КА с соблюдением геометрических соотношений конструкции КА Т≤0,6 D; L≤D; 0,11D≤d≤0,25D позволяет разместить в зоне полезного груза РН среднего класса типа «Союз» до 4-х КА ДЗЗ в видимом и (или) инфракрасном диапазоне наблюдения с высоким разрешением. Обеспечение размещенных на адаптере устройств отделения с возможностью отделения КА под углом не менее 15° к продольной оси РН, позволяет избежать в процессе отделения соударения между КА, а также между КА и элементами системы крепления и отделения. Благодаря этому возможна установка КА, размещенных на адаптере с ориентацией их продольных осей параллельно продольной оси РН. Это позволяет придать КА большие продольный и поперечный размеры. При этом на адаптере удается разместить до трех КА.
Одновременно размещение УО с установленным на нем КА на платформе, связанной со стойками, закрепленными на адаптере, позволяет увеличить количество КА в зоне полезного груза РН. При этом размещение стоек между КА обеспечивает безударность отделения КА, размещенных на адаптере.
Формирование орбитальной структуры КА за счет использования возможностей КДУ позволяет уменьшить затраты на развертывание орбитальной структуры, благодаря отказу от использования блока выведения. Одновременно отсутствие блока выведения увеличивает объемы зоны полезного груза РН, что способствует размещению большего числа КА.
Развертывание орбитальной структуры из большого числа КА одним пуском РН снижает затраты потребные для выведения одного КА. Кроме того, такая структура сразу позволяет обеспечить получение информации о любом объекте в большом диапазоне широт раз в сутки, что делает ее привлекательной для потребителей.
Способность средств разворота КА вокруг его центра инерции обеспечить угол разворота в плоскости, перпендикулярной плоскости орбиты в положение когда его оптическая ось направлена касательно к горизонту также увеличивает возможность наблюдения за большим количеством объектов, а также расширяет диапазон широт, в котором обеспечивается получение информации о каждом раз в сутки. Это также способствует увеличению экономической эффективности РКС.
Разработка и изготовление предлагаемой РКС при современном уровне промышленного производства не представляет принципиальной сложности, что не создаст технических проблем при реализации данного решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ достижения дифракционного предела разрешения изображений дистанционного зондирования Земли для малых космических аппаратов | 2019 |
|
RU2730886C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| Космический аппарат дистанционного зондирования Земли микрокласса | 2017 |
|
RU2651309C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| Многофункциональный космический аппарат | 2016 |
|
RU2640167C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| Способ достижения дифракционного разрешения цветных изображений дистанционного зондирования Земли для малых космических аппаратов | 2023 |
|
RU2830525C1 |
| Способ оценки параметров движения подвижных объектов по результатам космической зональной съемки и аппаратура космической зональной съемки космического комплекса дистанционного зондирования Земли для осуществления способа | 2018 |
|
RU2696368C1 |
Изобретение относится к области космической техники, а более конкретно к дистанционному зондированию Земли. Ракетно-космическая система (РКС) высокодетального дистанционного зондирования Земли в видимом и/или инфракрасном диапазоне наблюдения включает ракету-носитель для доставки на орбиту выведения космических аппаратов (КА), имеющих плоскость крепления к РН, перпендикулярную продольной оси КА, и размещенных в системе крепления и отделения от РН. КА имеют в своем составе оптико-электронную аппаратуру наблюдения, корректирующую двигательную установку и средства разворота КА относительно его центра инерции. Система крепления и отделения выполнена в виде адаптера. На адаптере размещены несколько устройств отделения с установленными на них КА, продольные оси которых параллельны продольной оси РН. На адаптере между КА закреплены стойки, связанные с платформой, на которой зафиксировано устройство отделения КА. КА снабжены запасом топлива, обеспечивающим перевод КА после отделения от РН с орбиты выведения на рабочую орбиту с минимальной высотой Н. Максимальный поперечный размер КА не превышает 0,6 диаметра D зоны полезного груза РН. Максимальная высота КА не превышает D, размер апертуры оптико-электронной аппаратуры d может находиться в пределах от 0,11 D до 0,25 D. 4 ил.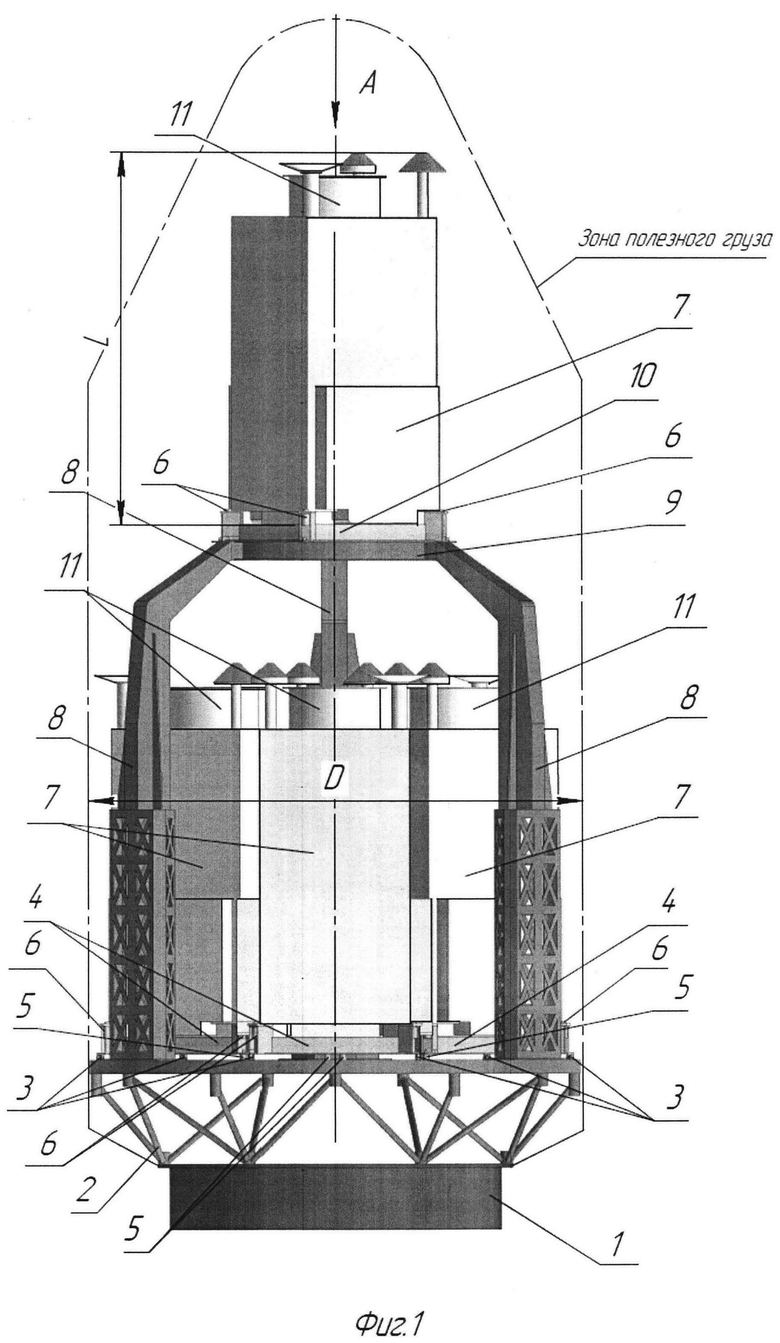
Ракетно-космическая система (РКС) высокодетального дистанционного зондирования Земли в видимом и/или инфракрасном диапазоне наблюдения, включающая в себя ракету-носитель для доставки на орбиту выведения космических аппаратов (КА), имеющих плоскость крепления к РН, перпендикулярную продольной оси КА, и размещенных в системе крепления и отделения от РН, каждый из которых имеет в своем составе оптико-электронную аппаратуру наблюдения, корректирующую двигательную установку и средства разворота КА относительно его центра инерции, отличающаяся тем, что система крепления и отделения выполнена в виде адаптера, на котором размещены несколько устройств отделения с установленными на них КА, продольные оси которых параллельны продольной оси РН или близки к такому положению, устройства отделения выполнены с возможностью отделения КА под углом не менее 15° к продольной оси РН, а на адаптере между КА закреплены стойки, связанные с платформой, на которой зафиксировано устройство отделения КА, которое установлено так, что его продольная ось параллельна продольной оси РН или близка к этому положению, устройство отделения выполнено с возможностью отделения установленного на ней КА в направлении продольной оси РН, корректирующие двигательные установки КА снабжены запасом топлива, обеспечивающим перевод КА после отделения от РН с орбиты выведения на рабочую орбиту с минимальной высотой Н, максимальный поперечный размер КА не превышает 0,6 диаметра D зоны полезного груза РН, максимальная высота КА не превышает D, размер апертуры оптико-электронной аппаратуры d может находиться в пределах от 0,11 D до 0,25 D, а средства разворота КА относительно его центра инерции обеспечивают возможность его разворота в плоскости, перпендикулярной плоскости орбиты на угол α, величина которого определяется выражением
α≥arc sin R/(R+H),
где R - радиус Земли.
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| US 10351268 B2, 16.07.2019. | |||

