ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицине, а именно к способам для управления хирургическим инструментом с пропусканием электрического тока через ткани, подлежащие нагреванию, в частности для контроля и достаточности трансмуральности поражения тканей при абляции миокарда при кардиохирургических операциях.
ПРЕДШЕСТВУЮЩИЙУРОВЕНЬТЕХНИКИ
Известен способ и устройство для трансмуральной абляции [US2003125729 A1, опубл. 03.07.2003], в котором между двумя электродами прикладывается биполярная радиочастотная энергия, таким образом, удаляя ткань между ними. Устройство мониторинга измеряет подходящий параметр, например импеданс или температуру, и показывает, когда ткань между электродами полностью удалена. В соответствии с одним из аспектов изобретения предусмотрена система обратной связи для определения температуры ткани, подвергшейся абляции. С этой целью зажимы включают в себя ряд термопар, которые поддерживаются в изолирующем элементе и немного выступают через него, чтобы зацепить любую ткань, зажатую между зажимами. Провода прикреплены к термопарам для передачи полученной информации в удаленное место.
К недостаткам способа мониторинга известного для трансмуральной абляции вышеописанного прибора можно отнести то, что будет измеряться температура самого датчика (термопары), которая при быстром изменении температуры будет отличаться от температуры ткани в месте измерения. Кроме того, невозможно измерить температуру во всем объеме ткани, так как датчики можно установить только в некоторых точках. Выборочный контроль температуры не позволяет достоверно определить достижение трансмуральности, так как для этого необходимо обеспечить нагрев самой низкотемпературной области ткани выше необходимого порога.
Известен способ управления устройством для абляции путем выбора уровня приложенной мощности в зависимости от импеданса обрабатываемой ткани, раскрытый в Международной заявке [WO2006080982 А1, опубл. 03.08.2006] и включающий:
а) размещение двух электродов устройства для абляции на поверхности ткани;
б) измерение импеданса ткани между электродами;
c) подачу питания на электроды на основе измеренного импеданса ткани путем:
i) подачу на электроды по существу постоянной мощности, если измеренный импеданс ткани находится между первым пороговым импедансом и вторым пороговым импедансом, причем первый пороговый импеданс меньше второго порогового импеданса;
ii) подачу на электроды переменной мощности, если измеренный импеданс ткани больше, чем второй пороговый импеданс, причем переменная мощность обратно пропорционально связана с импедансом ткани.
Основным недостатком данного способа является то, что мощность определяется только значением импеданса в данный момент времени. Для её оценки не учитывается толщина ткани, зажатой между электродами. Но узкий и тонкий участок ткани и толстый, и широкий могут иметь одинаковый импеданс, а мощность для абляции в каждом случае нужна разная. Мощность может оказаться избыточной для конкретных условий, это приведет к локальному перегреву и высушиванию ткани в зоне контакта с электродом, повышению импеданса и ложному выводу о полученной трансмуральности. Недостаточная мощность приведет к увеличению времени абляции и, соответственно, к нежелательному прогреву ткани, расположенной близко к зоне абляции.
Известен способ абляции биологических тканей и устройство для его осуществления [RU2691845 C1, опубл. 18.06.2019], в котором для более достоверного контроля (оценки) достижения факта и момента трансмуральности биологических тканей в процессе их абляции, о температуре ткани судят на основании скорости изменения импеданса, при этом поддерживают определенный уровень мощности для обеспечения заданной скорости изменения импеданса. По уровню мощности и соответствующей скорости изменения импеданса рассчитывают энергию, необходимую для нагрева ткани до определенной температуры.
Способ включает следующие шаги:
– размещение двух электродов устройства (инструмента) для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения;
– вычисление значения импеданса ткани Z и скорости его изменения dZ/dt;
– вычисление мощности W и скорости её изменения dW/dt;
– подсчет отданной в нагрузку энергии E;
– поддержание заданного значения скорости снижения импеданса;
– оценку значения необходимой для достижения трансмуральности ткани полной энергии Eп при достижении значения импеданса величины, составляющей 0,7-0,8 от начального значения импеданса;
– оценку максимально допустимой мощности Wмакс при достижении значения импеданса величины, составляющей 0,7-0,8 от начального значения импеданса;
– осуществление перехода в режим поддержания постоянного уровня импеданса (выход на плато);
– оценку достижения трансмуральности на основании установления значения мощности W, превышающей Wмакс, или на основании количества отданной в нагрузку энергии E, превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп, или по истечении заданного времени после осуществления перехода в режим поддержания постоянного уровня импеданса.
К недостаткам управления устройством абляции вышеописанным способом можно отнести то, что для оценки значения необходимой для достижения трансмуральности ткани полной энергии Eп и максимально допустимой мощности Wмакс не учитывается толщина ткани, зажатой между электродами.
А также во всех известных способах управления процессом абляции не осуществляется контроль и регулирование скорости нагрева зажатой между электродами ткани в зависимости от её толщины.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В основу изобретения поставлена задача создания способа управления хирургическим инструментом (устройством абляции) обеспечивающего равномерный прогрев как поверхностных, так и глубоких слоев обрабатываемой ткани при пропускании через неё электрического тока, путем установления оптимальной скорости нагрева.
Техническим результатом является оптимизация времени проведения операций – создание трансмуральной зоны поражения миокарда за возможно более короткий период.
Поставленная задача решается тем, что, как и известный, предлагаемый способ управления хирургическим инструментом для абляции биологических тканей, включает:
– подключение устройства биполярной абляции к источнику питания, причем устройство биполярной абляции имеет два электрода;
– размещение двух электродов устройства (инструмента) для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения и постоянный контроль (измерение) импеданса ткани Z(U/I) и скорости его изменения dZ/dt, мощности W и скорости её изменения dW/dt и подсчет отданной в нагрузку энергии E в течение всего процесса абляции;
– проверку начальных (стартовых) условий и нагрев обрабатываемой ткани с заданной скоростью до достижения величины заданного значения снижения импеданса, составляющей 0,7 – 0,8 от начального значения импеданса;
– оценку значения необходимой для достижения трансмуральности ткани полной энергии Eп и максимально допустимой мощности Wмакс, необходимой для достижения трансмуральности, осуществление перехода в режим поддержания постоянного уровня импеданса (выход на плато);
– оценку достижения трансмуральности на основании установления значения мощности W, превышающей Wмакс, или на основании количества отданной в нагрузку энергии E, превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп, или по истечении заданного времени после осуществления перехода в режим поддержания постоянного уровня импеданса.
Новым является то, что для оценки полной энергии Eп и максимальной мощности Wмакс, необходимой для достижения трансмуральности, дополнительно после проверки начальных условий и до достижения величины заданного значения снижения импеданса, составляющей 0,8 – 0,9 от начального значения импеданса, проводят оценку толщины ткани и в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами, первоначально заданной, либо её увеличивают, путем изменения заданного значения скорости снижения импеданса.
Причем в варианте 1 способа для оценки толщины ткани осуществляют следующие шаги:
– выбор некоторого заданного значения энергии Eз, отданной в нагрузку, после выделения которой производится вычисление значения импеданса Z соответствующего EЗ;
– стабилизацию первоначально заданной скорости снижения импеданса dZ/dt и соответственно скорости нагрева ткани;
– сравнение значения текущей энергии E и Eз при изменении импеданса в заданное число раз, и, в случае, превышения Eз,
– изменение заданного значения скорости снижения импеданса пропорционально отношению отданной в нагрузку текущей энергии E и изменению импеданса Z.
При этом для оценки толщины обрабатываемой ткани первоначально выбирают мощность от 5 до 10Вт.
Кроме того заданное значение отданной в ткани на начальном этапе энергии Eз выбирают из диапазона от 20 до 100 Дж, предпочтительно, 70Дж.
Кроме того, заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
При том, что заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
Кроме того, поддержание заданного значения скорости снижения импеданса и поддержание постоянного уровня импеданса осуществляют путем изменения мощности.
При этом скорость изменения мощности выбирают из диапазона от 1 до 5 Вт/с и предпочтительно не более 3 – 5 Вт/с.
Целесообразно, чтобы значение полной энергии Eп было в 2-5 раз больше значения энергии при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса.
Целесообразно, чтобы максимально допустимая мощность Wмакс была в 3 - 6 раз, предпочтительно в 4 - 5 раз больше значения мощности при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса.
Кроме того, для вычисления начального значения импеданса на электроды подают напряжение от 5 до 25 В, предпочтительно от 10 до 20 В.
Причем в варианте 2 способа для оценки толщины ткани осуществляют следующие шаги:
– выбор некоторого заданного значения импеданса Z, после достижения которого вычисляют отданную в нагрузку энергию E;
– стабилизацию заданной скорости снижения импеданса dZ/dt и соответственно заданной скорости нагрева ткани;
– сравнение заданного значения импеданса и текущего при изменении импеданса в заданное число раз, и в случае, если текущее Z. превышает заданное значение импеданса,
– изменение заданного значения скорости снижения импеданса пропорционально отношению отданной в нагрузку текущей энергии E и изменению импеданса Z.
При этом для оценки толщины обрабатываемой ткани первоначально выбирают мощность от 5 до 10Вт.
Кроме того, заданное значение снижения импеданса для сравнения заданного значения Z .и текущего значения Z выбирают из диапазона 0,8 - 0,9 от начального значения импеданса, предпочтительно, 0,85.
Кроме того, заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
При том, что заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
Кроме того, поддержание заданного значения скорости снижения импеданса и поддержание постоянного уровня импеданса осуществляют путем изменения мощности.
При этом скорость изменения мощности выбирают из диапазона от 1 до 5 Вт/с и предпочтительно не более 3 – 5 Вт/с.
Целесообразно, чтобы значение полной энергии Eп было в 2-5 раз больше значения энергии при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса.
Целесообразно, чтобы максимально допустимая мощность Wмакс была в 3 - 6 раз, предпочтительно в 4 - 5 раз больше значения мощности при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса.
Кроме того, для вычисления начального значения импеданса на электроды подают напряжение от 5 до 25 В, предпочтительно от 10 до 20 В.
Предлагаемый способ предназначен для управления устройством абляции биологических тканей. Устройства используются в медицине для нагрева биологических тканей с целью деструкции определённого участка ткани без нарушения целостности органа, в том числе для создания электроизолирующих линий на некоторых участках миокарда, препятствующих патологическому распространению электрических сигналов, вызывающих фибрилляцию предсердий. С увеличением температуры импеданс биологической ткани снижается. Это обусловлено, в основном, дегидратацией ионов и уменьшением вязкости среды, т.е. уменьшением сопротивления движению ионов. Снижение импеданса биологической ткани можно использовать для косвенной оценки повышения температуры ткани. Из более ранних исследований известно, что в соответствии с характерной кривой импеданса ткани, импеданс ткани (сопротивление) по мере нагрева падает, затем при достижении температуры около 70-90 °C падение прекращается, и при дальнейшем нагреве, по мере высушивания ткани начинает расти. При этом, если проводить нагрев заданного объема ткани с заданной теплоемкостью, то для достижения определенной температуры ткани, а следовательно, и определенного снижения импеданса ткани, необходимо затратить определенное количество энергии. .
При сопоставимых условиях воздействия, в данном случае одном и том же инструменте для абляции, и одной и той же площади электродов, разное количество затраченной энергии на нагрев ткани до заданной температуры будет указывать на разную толщину ткани находящейся между электродами. Следовательно, применительно к определенному инструменту с определенным размером электродов, соотношение начального импеданса (сопротивления) к затраченной энергии, необходимой для заданного снижения импеданса, будет отражать толщину зажатого между электродами участка ткани. Зажатый один и тот же объем ткани при разной длине (а, следовательно, и площади) контакта ткани с электродами будет характеризоваться разной толщиной и разным импедансом. К примеру, вдвое меньшая длина (а следовательно и площадь) контакта ткани с электродами, при том же объеме ткани будет характеризоваться вдвое большей толщиной и вчетверо большим импедансом.
Процесс нагрева обрабатываемой ткани происходит неравномерно. В первую очередь, и с более высокой скоростью нагреваются поверхностные слои ткани, находящиеся в непосредственном контакте с электродами. По мере удаления слоёв ткани от электродов (более глубоких слоёв) плотность тока падает, и скорость нагрева ткани уменьшается. Чем толще ткань, тем сильнее отличается скорость нагрева поверхностных (находящихся ближе к электродам) и глубоких слоев ткани. Вследствие наличия градиента температур между поверхностными и глубокими слоями ткани, нагрев глубоких слоев ткани происходит не только за счет проходящего через них тока, но и за счет теплопередачи от поверхностных слоев к глубоким. Процесс теплопередачи имеет конечную скорость и требует тем большего количества времени, чем толще ткань. Из вышеописанного исходит, что скорость нагрева ткани должна различаться в зависимости от ее толщины. Чем толще обрабатываемая ткань, тем ниже должна быть скорость нагрева для обеспечения равномерного прогрева поверхностных и глубоких слоев обрабатываемой ткани.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ.
Далее настоящее изобретение будет описано в виде примеров со ссылкой на сопровождающие чертежи, на которых:
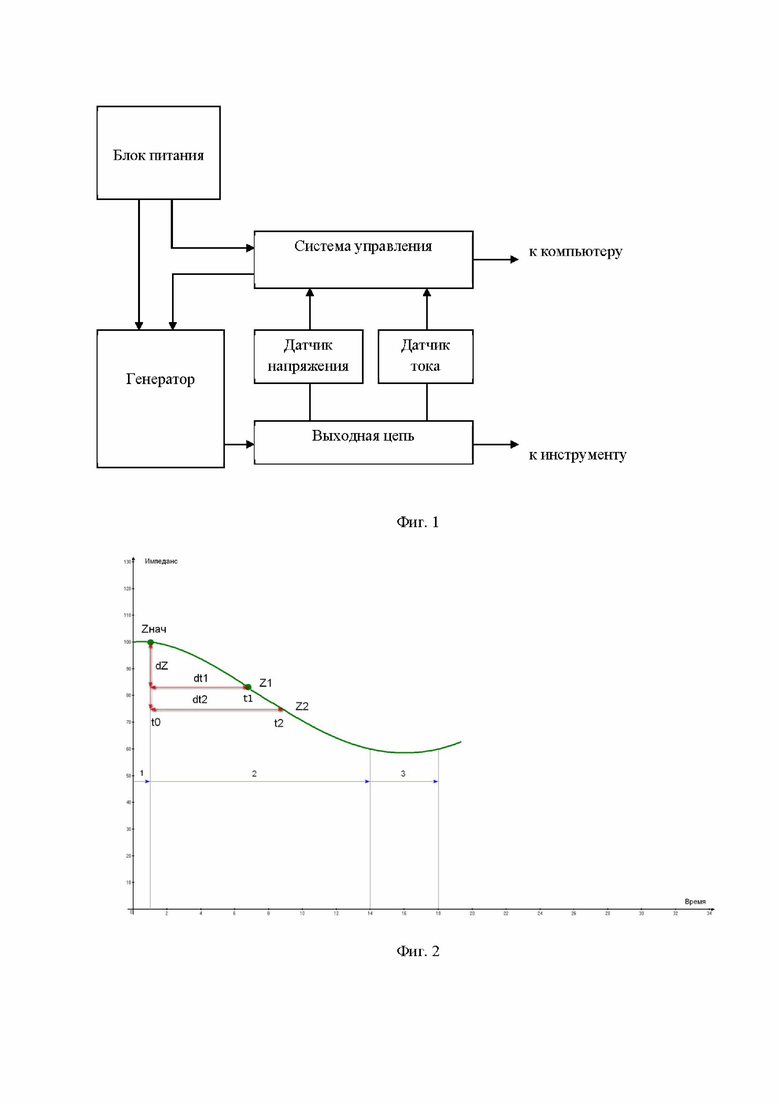
На Фиг. 1 представлена блок-схема устройства для осуществления предлагаемого способа.
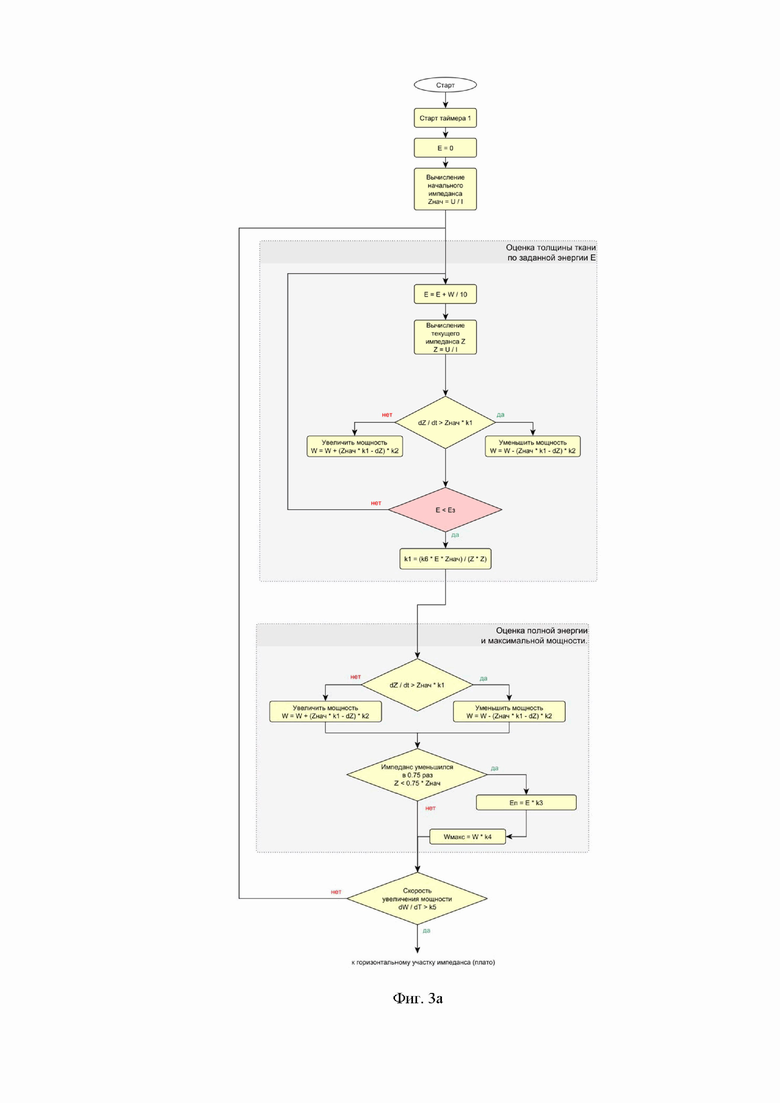
На Фиг. 2 приведен график зависимости импеданса от времени.
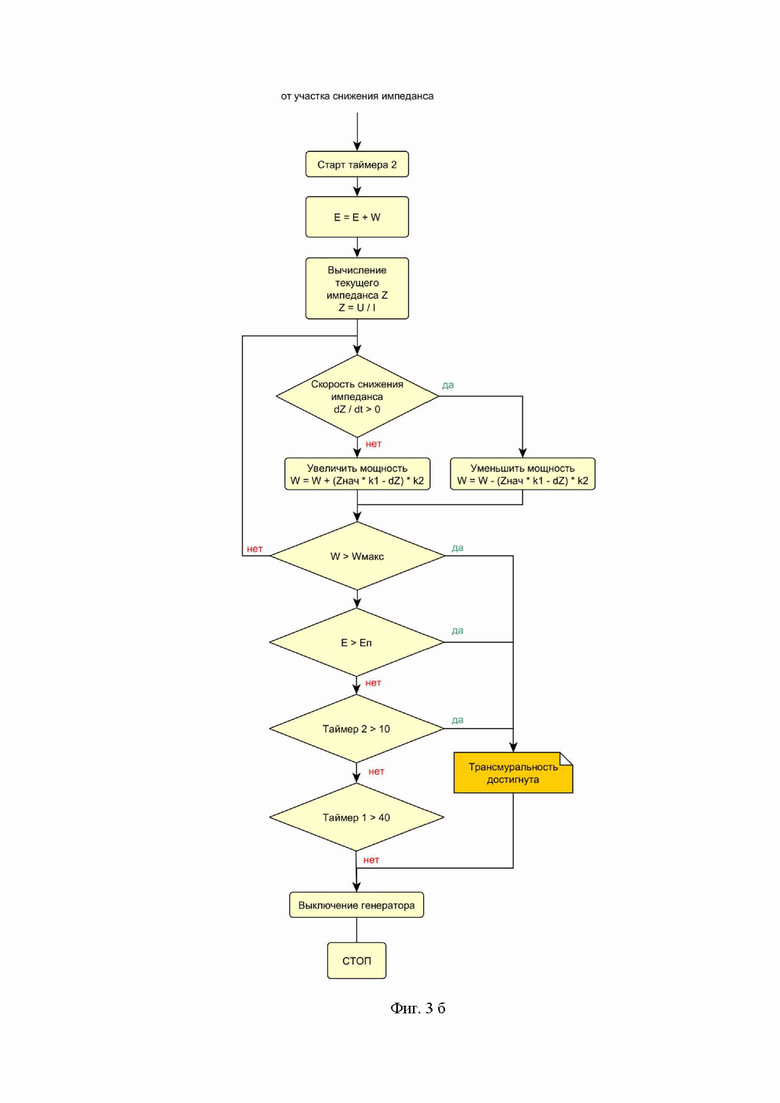
На Фиг. 3 представлен алгоритм работы устройства в виде блок-схемы для вариант1 заявляемого способа:
фиг 3а – начало процесса абляции до перехода к горизонтальному участку импеданса (плато),
фиг. 3б – продолжение процесса абляции и его завершения.
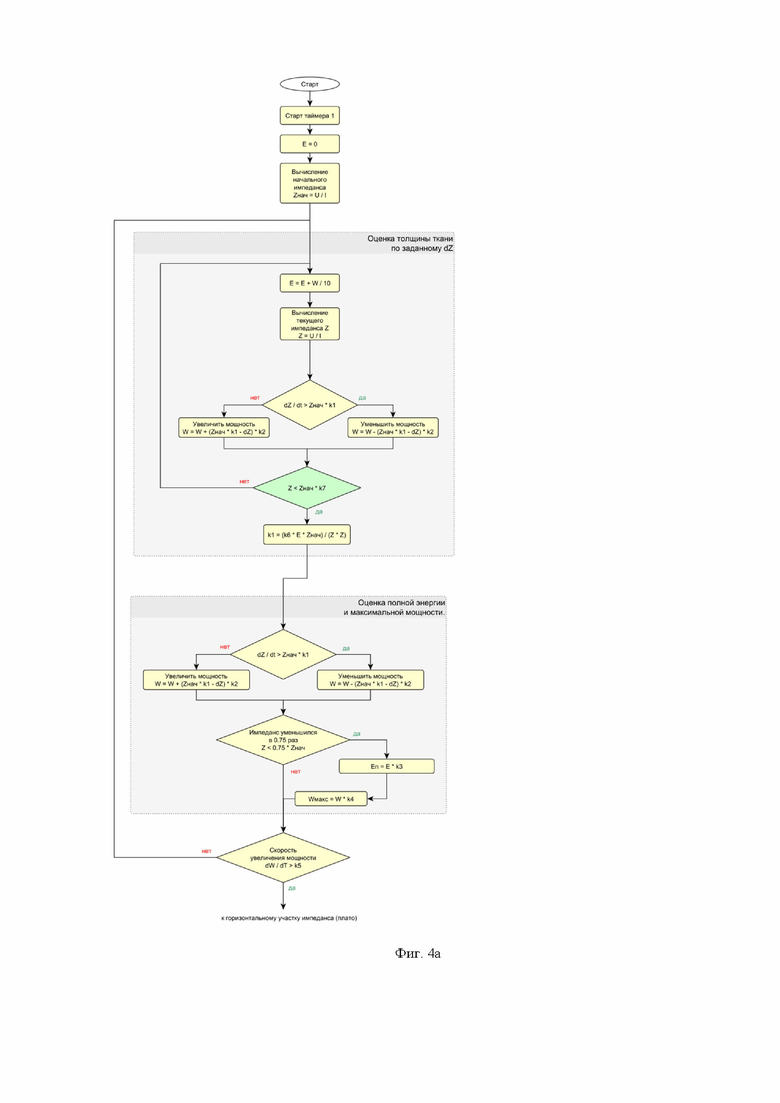
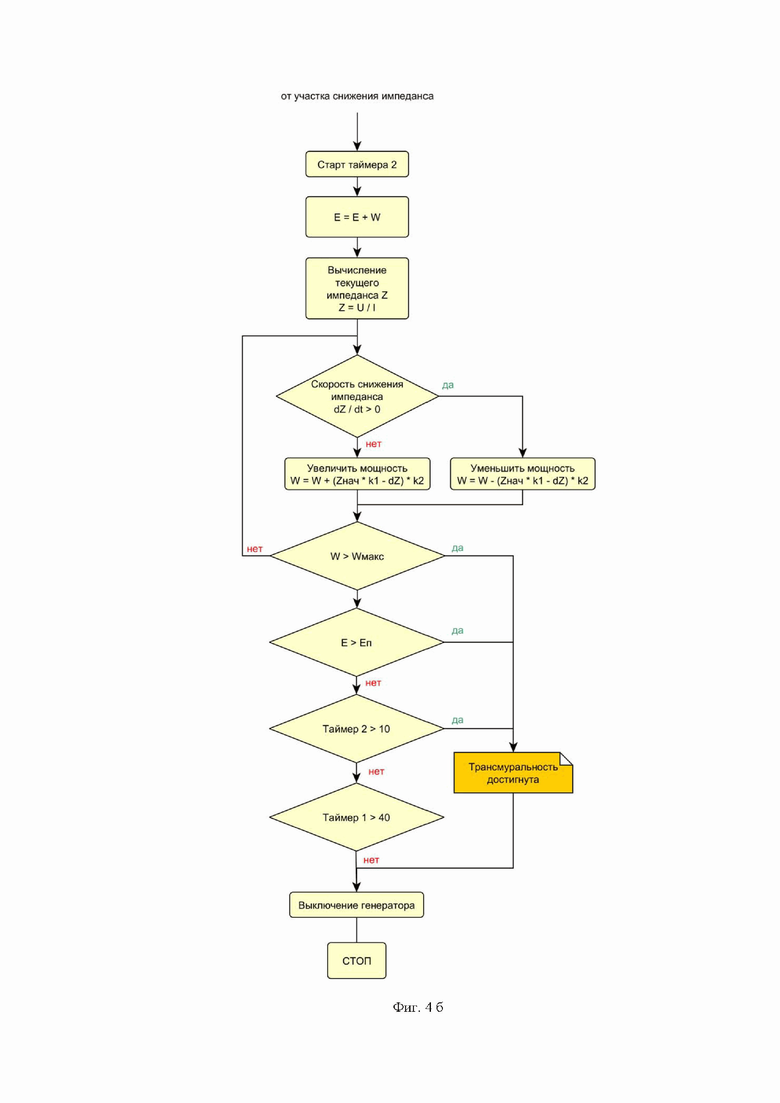
На Фиг. 4 представлен алгоритм работы устройства в виде блок-схемы для варианта 2 заявляемого способа:
фиг 4а – начало процесса абляции до перехода к горизонтальному участку импеданса (плато),
фиг. 4б – продолжение процесса абляции и его завершения.
Пример 1 – Вариант 1 заявляемого способа управления устройством абляции биологических тканей. Оценка толщины ткани по заданной энергии.
После инициализации микропроцессора системы управления 3 первоначально на инструмент подают от генератора 2 высокочастотное напряжение от 5 до 25 В, предпочтительно 10 вольт, и определяют в первые 3 секунды начальный импеданс Zнач. обрабатываемой ткани и проверяют соответствие вычисленного значения импеданса разрешенному диапазону. Если вычисленный импеданс находится в диапазоне от 20 до 300 Ом, лучше от 40 до 200 Ом продолжают подачу напряжения.
С момента начала абляции через промежутки времени dt, равные 100мс, в соответствии с первым участком графика приведенного на фиг. 2 (точка t0), микропроцессор начинает вычисление значения импеданса ткани Z и скорости его изменения, мощности W и скорости её изменения, а также подсчет отданной в нагрузку энергии E.
Микропроцессор устанавливает мощность от 5 до 10Вт и подсчитывает количество отданной энергии по формуле: E=E+W/10, вычисляет текущий импеданс и стабилизирует заданную скорость снижения импеданса (зависит от коэффициента k1– задаёт скорость снижения импеданса).
Экспериментально установлено, что в начале абляции для поддержания скорости изменения импеданса 5% в секунду, достаточно небольшой скорости изменения мощности, например увеличения мощности на 1Вт/с. По мере нагревания ткани, для поддержания скорости снижения импеданса 5% в секунду, требуется большее приращение мощности, например, 3Вт/с.
Заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
Для заявленного диапазона значений скорости снижения импеданса от 2 до 10% в секунду k1= от 0.002 до 0.01 при dt = 0.1 cекунды (участок на фиг. 2 до точки t1).
При достижении количества выделенной в ткани заранее заданного значения энергии, предпочтительно равного 100 Дж, микропроцессор производит оценку толщины ткани и вычисляет коэффициент k1 по формуле:
 ,
,
где k6 – коэффициент пропорциональности между k1 и толщиной ткани в условных единицах. k6 = от 0,001 до 0.01.
Коэффициент k1 задаёт скорость снижения импеданса и обратно пропорционален толщине ткани. Скорость нагрева ткани (по умолчанию задана низкая скорость) при его пересчёте может быть увеличена, если обрабатываемая ткань тонкая. При повышении температуры сопротивление ткани уменьшается. Это позволяет судить о нагреве ткани по ее импедансу.
Для вычисления микропроцессором скорости изменения импеданса в зависимости от Zнач (dZ/dt*k1) и заданного значения скорости снижения импеданса равным 5% устанавливают k1=0.005.
Для заявленного диапазона значений скорости снижения импеданса от 2 до 10% в секунду k1 = от 0.002 до 0.01 при dt = 0.1 cекунды, вычисленное значение k1 для определения скорости нагрева (точка t1 на фиг. 2), в зависимости от Z нач., например, может быть:
– для Zнач=100 Ом и снижения до Z=0.85* Zнач (до 85 Ом) и для k6=0.0036, вычисленное значение k1=0.005;
– для Zнач=200 Ом и снижения до Z=0.85* Zнач (до 170 Ом) и для k6=0.0036, вычисленное значение k1=0.002;
для Zнач=50 Ом и снижения до Z=0.85* Zнач (до 42 Ом) и для k6=0.0036, вычисленное значение k1=0.01.
После оценки толщины ткани и изменения скорости её нагрева микропроцессор переходит к оценке полной энергии Еп, необходимой для достижения трансмуральности и максимально допустимой мощности Wмакс.
Устанавливают значение k5=0.3 для контроля текущей скорости изменения мощности в зависимости от заданного значения скорости изменения мощности равного 3Вт/с. Возможный диапазон значений k5 = от 0.1 до 0.5.
Энергия E равна 1/10 суммы мгновенных значений мощности W через промежутки времени dt=0.1 секунды.
Также микропроцессор, с момента начала абляции, вычисляет скорость изменения подаваемой на инструмент мощности dW/dt и регулирует мощность для поддержания заданной скорости снижения импеданса, вычисляя мощность по формуле:
W=W±(Zнач*k1-dZ)*k2, где k1=0.005 для заданной скорости 5% в секунду, dZ - изменение импеданса за время dt, k2 от 0.2 до 1– шаг изменения мощности.
Если скорость снижения dZ/dt выше 5% в секунду, микропроцессор уменьшает мощность пропорционально отклонению скорости до восстановления скорости снижения импеданса на уровне 5% в секунду. Если скорость снижения импеданса dZ/dt ниже 5% в секунду, микропроцессор увеличивает мощность пропорционально отклонению скорости до восстановления скорости снижения импеданса на уровне 5% в секунду и далее управляет мощностью, поддерживая скорость падения импеданса неизменной на уровне, 5% в секунду.
При значении импеданса Z меньше, чем вычисленное по формуле Z=0.75*Zнач. микропроцессор вычисляет значение полной энергии Eп, необходимой для достижения трансмуральности поражения ткани по формуле: Eп =Е*k3, где k3 от 2 до 5– коэффициент полной энергии.
Одновременно микропроцессор рассчитывает максимально допустимую мощность Wмакс по формуле: Wмакс = W*k4, где k4 –коэффициент мощности равный 4. Возможный диапазон значений коэффициента мощности от 3 до 6.
Экспериментально установлено, что во время абляции импеданс Z снижается до 50% и более от начального импеданса Zнач. Точка t2 на графике Фиг. 2 выбрана на уровне 75% от Zнач, примерно в середине максимального диапазона изменения импеданса.
В точке t2 выделенная энергия E равна от 20% до 50% полной энергии, необходимой для достижения трансмуральности. Поэтому возможный диапазон значений k3 от 2 до 5.
В точке t2 мощность W равна от 15% до 30% максимально допустимой мощности W макс для данного объема ткани. Поэтому k4 выбирается в диапазоне от 3 до 6.
При приближении импеданса Z к минимальному значению (плато – участок 3 на фиг. 2), скорость возрастания мощности может превышать 3Вт/с. Поэтому k5 выбирается в диапазоне от 0.1 до 0.5.
При значении скорости изменения мощности dW/dt больше заданного значения 3Вт/с переходят в режим поддержания постоянного уровня импеданса (выход на плато), путем регулирования мощности, увеличения или уменьшения её в зависимости от колебаний импеданса Z, чтобы не допустить чрезмерного нагрева ткани.
Различная плотность тока в ткани приводит к неравномерному выделению энергии и разной температуре участков ткани. Для компенсации разницы температур необходимо некоторое время поддерживать ткань при достигнутой максимальной температуре. Поддерживая импеданс на неизменном уровне регулировкой мощности, аппарат поддерживает среднюю температуру ткани неизменной. При этом происходит перераспределение и выравнивание температуры между соседними участками ткани вследствие теплопередачи.
Предпочтительное заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
Микропроцессор выводит сообщение о достижении трансмурального поражения ткани и прекращает работу генератора:
1. При выделении полной энергии Eп в нагрузку;
2. При увеличении мощности выше W макс;
3. По истечении заданного времени, формируемого таймером 2 (алгоритм на фиг.3), после осуществления перехода в режим поддержания постоянного уровня импеданса.
Для защиты от чрезмерного нагрева и повреждения ткани генератор выключается по истечении 40 секунд, формируемых таймером 1 (алгоритм на фиг. 3) от начала абляции независимо от других критериев.
Пример 2 – Вариант 2 заявляемого способа управления устройством абляции биологических тканей. Оценка толщины ткани по заданному значению изменения импеданса (dZ).
После инициализации микропроцессора системы управления 3 первоначально на инструмент подают от генератора 2 высокочастотное напряжение от 5 до 25 В, предпочтительно 10 вольт, и определяют в первые 3 секунды начальный импеданс Zнач обрабатываемой ткани и проверяют соответствие вычисленного значения импеданса разрешенному диапазону. Если вычисленный импеданс находится в диапазоне от 20 до 300 Ом, лучше от 40 до 200 Ом продолжают подачу напряжения.
С момента начала абляции через промежутки времени dt, равные 100мс, в соответствии с первым участком графика приведенного на фиг. 2 (точка t0), микропроцессор начинает вычисление значения импеданса ткани Z и скорости его изменения, мощности W и скорости её изменения, а также подсчет отданной в нагрузку энергии E.
Микропроцессор устанавливает мощность от 5 до 10Вт, подсчитывает количество отданной энергии по формуле: E=E+W/10,контролирует изменение импеданса и стабилизирует заданную скорость снижения импеданса (зависит от k1– задаёт скорость снижения импеданса).
Экспериментально установлено, что в начале абляции для поддержания скорости изменения импеданса 5% в секунду, достаточно небольшой скорости изменения мощности, например увеличения мощности на 1Вт/с. По мере нагревания ткани, для поддержания скорости снижения импеданса 5% в секунду, требуется большее приращение мощности, например, 3Вт/с.
Заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
Для заявленного диапазона значений скорости снижения импеданса от 2 до 10% в секунду k1= от 0.002 до 0.01, при dt = 0.1 cекунды (участок на фиг. 2 до точки t1).
При изменении импеданса в k7 раз, микропроцессор производит оценку толщины ткани и вычисляет коэффициент k1 по формуле:
,
где k6 – коэффициент пропорциональности между k1 и толщиной ткани в условных единицах, принятый k6 = от 0,001 до 0.01.
А коэффициент k7 – это порог изменения импеданса для оценки толщины ткани, выбирают в диапазоне от 0,8 до 0,9, предпочтительно 0,85 от начального значения импеданса (точка t1 на кривой импеданса – Фиг.2).
Далее переход к алгоритму аналогичному примеру 1: изменение скорости нагрева, оценка полной энергии Еп, необходимой и максимально допустимой мощности Wмакс и алгоритму достижения трансмуральности обрабатываемой ткани.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2691845C1 |
| Способ абляции миокарда и устройство для его осуществления | 2021 |
|
RU2788005C1 |
| НАПРАВЛЯЕМАЯ АБЛЯЦИЯ СЕРДЦА С ИСПОЛЬЗОВАНИЕМ МАШИННОГО ОБУЧЕНИЯ (ML) | 2020 |
|
RU2779871C2 |
| АППАРАТУРА И СПОСОБ КОНТРОЛЯ ХАРАКТЕРИСТИК СЕРДЕЧНОЙ ДЕЯТЕЛЬНОСТИ | 1997 |
|
RU2195168C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ АБЛЯЦИИ НА ОСНОВЕ КОНТАКТНОЙ СИЛЫ | 2013 |
|
RU2648213C2 |
| БИПОЛЯРНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ДЕСТРУКЦИИ МИОКАРДА ПРЕДСЕРДИЙ ПРИ ЛЕЧЕНИИ НАДЖЕЛУДОЧКОВЫХ АРИТМИЙ | 2016 |
|
RU2665627C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ | 2013 |
|
RU2657960C2 |
| ПРОТОКОЛ ОСТОРОЖНОЙ НЕОБРАТИМОЙ ЭЛЕКТРОПОРАЦИИ (НЭП) ДЛЯ ПРЕДОТВРАЩЕНИЯ ОБРАЗОВАНИЯ ПУЗЫРЬКОВ | 2021 |
|
RU2774573C1 |
| НЕОБРАТИМАЯ ЭЛЕКТРОПОРАЦИЯ (НЭП) НА ОСНОВЕ ИМПЕДАНСА | 2021 |
|
RU2770452C1 |
Группа изобретений относится к медицине, а именно к способам управления хирургическим инструментом для абляции биологических тканей. При исполнении способа подключают устройство биполярной абляции к источнику питания. Устройство абляции имеет два электрода. Размещают два электрода инструмента для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами. Подают на электроды инструмента напряжения. Постоянно измеряют импеданс ткани Z и скорость его изменения dZ/dt, мощность W и скорость её изменения dW/dt. Подсчитывают отданную в нагрузку энергию E в течение всего процесса абляции. Проверяют начальные условия. Нагревают обрабатываемую ткань с заданной скоростью до достижения величины заданного значения снижения импеданса, составляющей 0,7–0,8 от начального значения импеданса. Оценивают значения необходимой для достижения трансмуральности ткани полной энергии Eп и максимально допустимой мощности Wмакс, необходимой для достижения трансмуральности. Осуществляют переход в режим поддержания постоянного уровня импеданса. Оценивают достижение трансмуральности на основании установления значения мощности W, превышающей Wмакс, или на основании количества отданной в нагрузку энергии E, превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп, или по истечении заданного времени после осуществления перехода в режим поддержания постоянного уровня импеданса. Для оценки полной энергии Eп и максимальной мощности Wмакс, необходимой для достижения трансмуральности, дополнительно после проверки начальных условий и до достижения величины заданного значения снижения импеданса, составляющей 0,8–0,9 от начального значения импеданса, проводят оценку толщины ткани и в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами, первоначально заданной, либо её увеличивают. При этом для оценки толщины ткани осуществляют выбор заданного значения энергии Eз, отданной в нагрузку, после выделения которой производится вычисление значения импеданса Z, соответствующего EЗ. Стабилизируют заданную скорость снижения импеданса dZ/dt и соответственно первоначально заданную скорость нагрева ткани. Сравнивают значения E и Eз при изменении импеданса в заданное число раз, и в случае превышения Eз изменяют заданное значение скорости снижения импеданса пропорционально отношению отданной в нагрузку текущей энергии E и изменению импеданса Z. В другом варианте исполнения для оценки полной энергии Eп и максимальной мощности Wмакс, необходимой для достижения трансмуральности, дополнительно после проверки начальных условий и до достижения величины заданного значения снижения импеданса, составляющей 0,8–0,9 от начального значения импеданса, проводят оценку толщины ткани и в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами первоначально заданной, либо её увеличивают. При этом для оценки толщины осуществляют выбор заданного значения импеданса Z, после достижения которого вычисляют отданную в нагрузку энергию E. Стабилизируют заданную скорость снижения импеданса dZ/dt и соответственно заданную скорость нагрева ткани. Сравнивают заданное значение импеданса Z и текущее значение импеданса Z при его изменении в заданное число раз, и в случае, если текущее Z превышает заданное значение импеданса Z, изменяют заданное значение скорости снижения импеданса пропорционально отношению отданной в нагрузку текущей энергии E и изменению импеданса Z. Обеспечивается способ для управления хирургическим инструментом с пропусканием электрического тока через ткани, подлежащие нагреванию, для контроля и достаточности трансмуральности поражения тканей при абляции миокарда при кардиохирургических операциях. 2 н. и 18 з.п. ф-лы, 6 ил.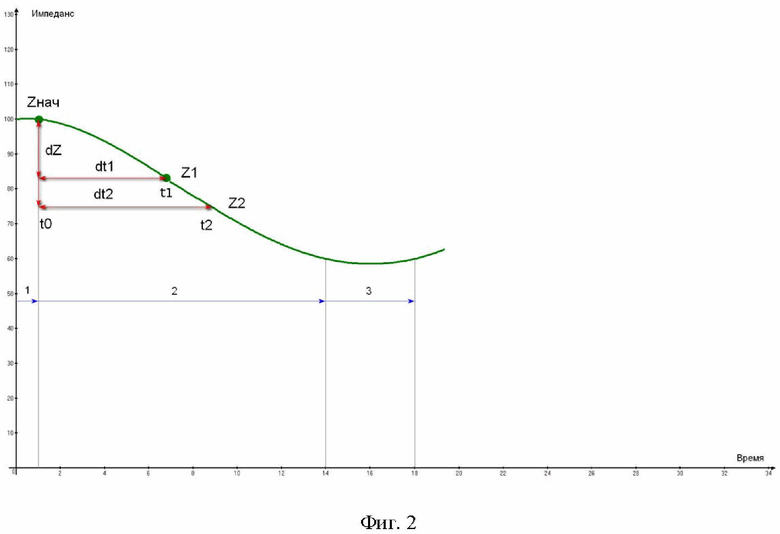
1. Способ управления хирургическим инструментом для абляции биологических тканей, характеризующийся тем, что включает:
– подключение устройства биполярной абляции к источнику питания, причем устройство биполярной абляции имеет два электрода;
– размещение двух электродов инструмента для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения, и постоянное измерение импеданса ткани Z и скорости его изменения dZ/dt, мощности W и скорости её изменения dW/dt, и подсчет отданной в нагрузку энергии E в течение всего процесса абляции;
– проверку начальных условий и нагрев обрабатываемой ткани с заданной скоростью до достижения величины заданного значения снижения импеданса, составляющей 0,7–0,8 от начального значения импеданса;
– оценку значения необходимой для достижения трансмуральности ткани полной энергии Eп и максимально допустимой мощности Wмакс, необходимой для достижения трансмуральности, осуществление перехода в режим поддержания постоянного уровня импеданса;
– оценку достижения трансмуральности на основании установления значения мощности W, превышающей Wмакс, или на основании количества отданной в нагрузку энергии E, превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп, или по истечении заданного времени после осуществления перехода в режим поддержания постоянного уровня импеданса,
отличающийся тем, что
для оценки полной энергии Eп и максимальной мощности Wмакс, необходимой для достижения трансмуральности, дополнительно после проверки начальных условий и до достижения величины заданного значения снижения импеданса, составляющей 0,8–0,9 от начального значения импеданса, проводят оценку толщины ткани и в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами, первоначально заданной, либо её увеличивают, при этом для оценки толщины ткани осуществляют:
– выбор заданного значения энергии Eз, отданной в нагрузку, после выделения которой производится вычисление значения импеданса Z, соответствующего EЗ;
– стабилизацию заданной скорости снижения импеданса dZ/dt и соответственно первоначально заданной скорости нагрева ткани;
– сравнение значений E и Eз при изменении импеданса в заданное число раз, и в случае превышения Eз,
– изменение заданного значения скорости снижения импеданса пропорционально отношению отданной в нагрузку текущей энергии E и изменению импеданса Z.
2. Способ по п. 1, отличающийся тем, что для оценки толщины обрабатываемой ткани первоначально выбирают мощность от 5 до 10Вт.
3. Способ по п. 1, отличающийся тем, что заданное значение отданной в ткани на начальном этапе энергии Eз выбирают из диапазона от 20 до 100 Дж, предпочтительно 70 Дж.
4. Способ по п. 1, отличающийся тем, что заданное значение скорости снижения импеданса выбрано из диапазона от 2-10% в секунду и составляет предпочтительно 5% в секунду.
5. Способ по п. 1, отличающийся тем, что заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
6. Способ по п. 1, отличающийся тем, что поддержание заданного значения скорости снижения импеданса осуществляют путем изменения мощности.
7. Способ по п. 1, отличающийся тем, что поддержание постоянного уровня импеданса осуществляют путем изменения мощности.
8. Способ по п. 1, отличающийся тем, что скорость изменения мощности выбрана из диапазона от 1 до 5 Вт/с и составляет предпочтительно не более 3-5 Вт/с.
9. Способ по п. 1, отличающийся тем, что значение полной энергии Eп превышает в 2-5 раз значение энергии при достижении значения импеданса величины, составляющей 0,7-0,8 от начального значения импеданса.
10. Способ по п. 1, отличающийся тем, что максимально допустимая мощность Wмакс превышает в 3-6 раз, предпочтительно 4-5 раз, значение мощности при достижении значения импеданса величины, составляющей 0,7-0,8 от начального значения импеданса.
11. Способ управления хирургическим инструментом для абляции биологических тканей, характеризующийся тем, что включает:
– подключение устройства биполярной абляции к источнику питания, причем устройство биполярной абляции имеет два электрода;
– размещение двух электродов инструмента для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения, и постоянное измерение импеданса ткани Z и скорости его изменения dZ/dt, мощности W и скорости её изменения dW/dt, и подсчет отданной в нагрузку энергии E в течение всего процесса абляции;
– проверку начальных условий и нагрев обрабатываемой ткани с заданной скоростью до достижения величины заданного значения снижения импеданса, составляющей 0,7–0,8 от начального значения импеданса;
– оценку значения необходимой для достижения трансмуральности ткани полной энергии Eп и максимально допустимой мощности Wмакс, необходимой для достижения трансмуральности, осуществление перехода в режим поддержания постоянного уровня импеданса;
– оценку достижения трансмуральности на основании установления значения мощности W, превышающей Wмакс, или на основании количества отданной в нагрузку энергии E, превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп, или по истечении заданного времени после осуществления перехода в режим поддержания постоянного уровня импеданса,
отличающийся тем, что
для оценки полной энергии Eп и максимальной мощности Wмакс, необходимой для достижения трансмуральности, дополнительно после проверки начальных условий и до достижения величины заданного значения снижения импеданса, составляющей 0,8–0,9 от начального значения импеданса, проводят оценку толщины ткани и в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами первоначально заданной, либо её увеличивают, при этом для оценки толщины осуществляют:
– выбор заданного значения импеданса Z, после достижения которого вычисляют отданную в нагрузку энергию E;
– стабилизацию заданной скорости снижения импеданса dZ/dt и соответственно заданной скорости нагрева ткани;
– сравнение заданного значения импеданса Z и текущего значения импеданса Z при его изменении в заданное число раз, и в случае, если текущее Z. превышает заданное значение импеданса Z,
– изменение заданного значения скорости снижения импеданса пропорционально отношению отданной в нагрузку текущей энергии E и изменению импеданса Z.
12. Способ по п. 11, отличающийся тем, что для оценки толщины обрабатываемой ткани первоначально выбирают мощность от 5 до 10Вт.
13. Способ по п. 11, отличающийся тем, что заданное значение снижения импеданса для сравнения заданного значения Z.и текущего значения Z выбирают из диапазона 0,8–0,9 от начального значения импеданса.
14. Способ по п. 11, отличающийся тем, что заданное значение скорости снижения импеданса выбрано из диапазона от 2-10% в секунду и составляет предпочтительно 5% в секунду.
15. Способ по п. 11, отличающийся тем, что заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
16. Способ по п. 11, отличающийся тем, что поддержание заданного значения скорости снижения импеданса осуществляют путем изменения мощности.
17. Способ по п. 11, отличающийся тем, что поддержание постоянного уровня импеданса осуществляют путем изменения мощности.
18. Способ по п. 11, отличающийся тем, что скорость изменения мощности выбрана из диапазона от 1 до 5 Вт/с и составляет предпочтительно не более 3-5 Вт/с.
19. Способ по п. 11, отличающийся тем, что значение полной энергии Eп превышает в 2-5 раз значение энергии при достижении значения импеданса величины, составляющей 0,7–0,8 от начального значения импеданса.
20. Способ по п. 11, отличающийся тем, что максимально допустимая мощность Wмакс превышает в 3-6 раз, предпочтительно 4-5 раз, значение мощности при достижении значения импеданса величины, составляющей 0,7–0,8 от начального значения импеданса.
| СПОСОБ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2691845C1 |
| US 2017000516 A1, 05.01.2017 | |||
| EP 3231371 A1, 18.10.2017 | |||
| JP 2018522612 A, 16.08.2018 | |||
| US 5558671 A, 24.09.1996. | |||

