ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицине, а именно к способам радиочастотной абляции биологических тканейи устройствам для их осуществления, в частности к управлению хирургическим инструментом при кардиохирургических операциях, а именно для контроля и достаточности трансмуральности поражения тканей миокарда.
ПРЕДШЕСТВУЮЩИЙУРОВЕНЬТЕХНИКИ
Известен способ управления устройством для абляции путем выбора уровня приложенной мощности в зависимости от импеданса обрабатываемой ткани, раскрытый в Международной заявке [WO2006080982 А1, опубл. 03.08.2006] и включающий:
а) размещение двух электродов устройства для абляции на поверхности ткани;
б) измерение импеданса ткани между электродами;
c) подачу питания на электроды на основе измеренного импеданса ткани путем:
i) подачу на электроды по существу постоянной мощности, если измеренный импеданс ткани находится между первым пороговым импедансом и вторым пороговым импедансом, причем первый пороговый импеданс меньше второго порогового импеданса;
ii) подачу на электроды переменной мощности, если измеренный импеданс ткани больше, чем второй пороговый импеданс, причем переменная мощность обратно пропорционально связана с импедансом ткани.
Не учитывается, что при большой толщине ткани и неровностях поверхности ткани, невозможно добиться трансмурального поражения ткани устанавливая мощность воздействия только на основании текущего импеданса ткани.
К тому же для её оценки не учитывается толщина ткани, зажатой между электродами. Мощность может оказаться избыточной для конкретных условий, это приведет к локальному перегреву и высушиванию ткани в зоне контакта с электродом, повышению импеданса и ложному выводу о полученной трансмуральности. Недостаточная мощность приведет к увеличению времени абляции и, соответственно, к нежелательному прогреву ткани, расположенной близко к зоне абляции.
Известен способ абляции биологических тканей и устройство для его осуществления [RU2691845 C1, опубл. 18.06.2019], выбранный в качестве ближайшего технического решения, в котором для более достоверного контроля (оценки) достижения факта и момента трансмуральности биологических тканей в процессе их абляции, поддерживают определенный уровень мощности для обеспечения заданной скорости изменения импеданса. По уровню мощности и соответствующей скорости изменения импеданса рассчитывают энергию, необходимую для нагрева ткани до определенной температуры.
Способ включает следующие шаги:
– размещение двух электродов устройства (инструмента) для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения;
– вычисление значения импеданса ткани Z и скорости его изменения dZ/dt;
– вычисление мощности W и скорости её изменения dW/dt;
– подсчет отданной в нагрузку энергии E;
– поддержание заданного значения скорости снижения импеданса;
– оценку значения необходимой для достижения трансмуральности ткани полной энергии Eп при достижении значения импеданса величины, составляющей 0,7-0,8 от начального значения импеданса;
– оценку максимально допустимой мощности Wмакс при достижении значения импеданса величины, составляющей 0,7-0,8 от начального значения импеданса;
– осуществление перехода в режим поддержания постоянного уровня импеданса (выход на плато);
– оценку достижения трансмуральности на основании установления значения мощности W, превышающей Wмакс, или на основании количества отданной в нагрузку энергии E, превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп, или по истечении заданного времени после осуществления перехода в режим поддержания постоянного уровня импеданса.
К недостаткам прототипа следует отнести то, что переход в режим поддержания постоянного уровня импеданса (выход на плато)осуществляется по критерию (dW/dT). Данный критерий хотя и позволяет определить наступление момента необходимости перехода в режим поддержания постоянного уровня импеданса, но обладает существенными недостатками. В частности, при быстром течении процесса нагрева ткани, существует риск локального перегрева ткани. Требуется использовать более чувствительный критерий (dW/dZ), характеризующий чувствительность импеданса ткани к нагреву.
Вторым недостатком прототипа является то, что время воздействия на ткань после перехода в режим поддержания постоянного уровня импеданса задано как константа, и не зависит от толщины обрабатываемой ткани. Изменение времени работы в режиме поддержания постоянного уровня импеданса в зависимости от толщины ткани позволит значительно сократить время воздействия для случаев работы с тонкими тканями.
Таким образом, всё ещё существует потребность введения дополнительных критериев для оценки и управления ходом процесса абляции и надежного достижения трансмуральности в процессе воздействия на биологические ткани устройства радиочастотной абляции.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В основу изобретения поставлена задача создания улучшенного способа и устройства для проведения трансмуральной радиочастотной абляции сердечной ткани, за счёт определения момента перехода в режим поддержания постоянного уровня импеданса с использованием более чувствительного и более точного критерия dW/dZ и регулирования времени работы в режиме поддержания постоянного уровня импеданса для каждой конкретной ситуации воздействия в зависимости от толщины обрабатываемой ткани.
Техническим результатом является повышение надежности трансмурального повреждения ткани при снижении общего времени абляции.
Дополнительным техническим результатом является оптимизация времени проведения операций – создание трансмуральной зоны поражения миокарда за возможно более короткий период.
Поставленная задача решается тем, что предлагаемый способ абляции биологических тканей включает:
– подключение устройства биполярной абляции к источнику питания, причем устройство биполярной абляции имеет два электрода;
– размещение двух электродов устройства (инструмента) для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения и постоянный контроль (измерение) импеданса ткани Z(U/I) и скорости его изменения dZ/dt, мощности W и скорости её изменения в зависимости от времени dW/dt;
– проверку начальных (стартовых) условий (вычисление Zнач.) и нагрев обрабатываемой ткани с заданной минимальной скоростью до достижения величины заданного значения снижения импеданса, составляющей 0,8 – 0,9, предпочтительно, 0, 85 от начального значения импеданса Zнач.;
– подсчёт суммарной энергии, отданной в нагрузку ∑Ε для снижения импеданса до упомянутого заданного значения (на заданную величину dZ);
– оценку толщины ткани зажатой между электродами в зависимости от отданной в нагрузку упомянутой энергии E и текущего импеданса Z;
– оценку толщины ткани зажатой между электродами в зависимости от произведения отданной в нагрузку упомянутой энергии E и текущего значения импеданса Z, причем в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами, первоначально заданной, либо её увеличивают;
– оценку отношения скорости изменения текущей мощности к скорости изменения импеданса dW/dZ относительно предварительно установленного порогового значения, при достижении которого осуществляют переход в режим поддержания постоянного уровня импеданса (выход на плато);
– установление длительности работы (времени для выравнивания Тв) в режиме поддержания постоянного уровня импеданса в зависимости от толщины ткани;
– оценку достижения трансмуральности по истечении установленного времени поддержания постоянного уровня импеданса (на горизонтальном участке кривой импеданса (на плато), определённого в зависимости от полученной оценки толщины ткани.
Кроме того, заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
Кроме того, для оценки толщины обрабатываемой ткани первоначально выбирают мощность от 5 до 10Вт.
Кроме того, поддержание (стабилизация) заданного значения скорости снижения импеданса (на участке оценки толщины ткани точки от точки t0 до t1) и поддержание (стабилизация) постоянного уровня импеданса (в течение времени нахождения на плато) осуществляют путем изменения мощности.
При этом скорость изменения мощности выбирают из диапазона от 1 до 5 Вт/с и предпочтительно не более 3 – 5 Вт/с.
Кроме того, для вычисления начального значения импеданса на электроды подают напряжение от 5 до 25 В, предпочтительно от 10 до 20 В.
Поставленная задача решается также тем, что устройство для абляции биологических тканей содержит блок питания, соединенный с высокочастотным генератором, системой управления, включающей микропроцессор, и дисплеем, подключенный к системе управления, а также содержащее выходную цепь для согласования генератора с рабочим инструментом для абляции, датчик напряжения и датчик тока , подключённые к выходной цепи и соединенные с системой управления, при этом микропроцессор выполнен с возможностью:
– вычисления значения импеданса ткани Z и скорости его изменения dZ/dt, вычисление мощности W и скорости её изменения dW/dt, а также подсчет отданной в нагрузку энергии E;
– оценки толщины ткани зажатой между электродами после проверки начальных условий и до достижения величины заданного значения снижения импеданса от начального значения импеданса, в зависимости от отданной в нагрузку энергии E и импеданса Z;
– изменения заданного значения скорости снижения импедансалибо оставления её первоначально заданнойв зависимости от оценки толщины ткани;
– оценку отношения dW/dZ относительно предварительно установленного порогового значения при достижении, которого осуществляют переход в режим поддержания постоянного уровня импеданса (выход на плато);
– поддержания постоянного уровня импеданса при выходе на плато в течение времени, определяемого в зависимости от толщины ткани;
– индикации вывода о достижении трансмуральности.
Падение импеданса ткани относительно стартового (Zнач.)происходит на 50 % и более в зависимости от различных факторов таких как, но не исключительно состояние ткани и уровень приложенной к ткани мощности. Бо'льшая приложенная мощность (US5558671 А, опубл. 1996-09-24) приводит в общем случае к бо'льшему падению импеданса относительно Zнач. При этом для поддержания заданной скорости нагрева ткани и, следовательно, дальнейшего снижения импеданса ткани, требуется поступательное увеличение приложенной к ткани мощности.
При этом существует предельный уровень мощности для каждого случая воздействия ограниченный, прежде всего, но не исключительно, площадью контакта электродов инструмента с обрабатываемой тканью, превышение которого приведет к недопустимому разрушению ткани в месте контакта с электродами.
Приближение процесса воздействия к предельным уровням мощности характеризуется снижением значения модуля изменения импеданса ткани, относительно значения изменения (роста) приложенной к ткани мощности. Иными словами рост скорости приращения приложенной к ткани мощности к приращению импеданса ткани выше определенного установленного значения (dW/dZ)>K,
где


K – коэффициент, характеризующий приближение процесса воздействия к предельным уровням мощности.
Выход процесса воздействия к предельным уровням мощности для конкретной ситуации воздействия, определяемый ростом коэффициента K выше установленного порогового значения, при условии, что само воздействие осуществлено с учётом оценки толщины ткани и корректной скорости нагрева для данной толщины, указывает на достаточный равномерный прогрев обрабатываемой ткани.
Однако, в условиях реальной хирургической операции на миокарде, электрический контакт электродов с миокардом неравномерен. Неравномерность контакта возникает вследствие наличия на поверхности миокарда, как жировых включений, так и неровности поверхности. В результате, плотность тока через разные участки миокарда может быть разной. Следовательно, эффективность нагрева данных участков будет ниже и в обрабатываемой зоне могут образовываться недостаточно прогретые участки. Нагреть данные участки возможно только за счет теплопередачи от соседних более нагретых участков. Требуемое для данного нагрева время назовем временем выравнивания температуры (далее – время выравнивания Тв).
Кроме того, за время выравнивания температуры происходит выравнивание температуры между более прогретыми поверхностными слоями ткани и менее нагретыми глубокими слоями ткани. Требуемое время выравнивания тем больше, чем больше толщина обрабатываемой ткани.
По сравнению с прототипом, в настоящем изобретении предлагается переход от контроля скорости изменения мощности - dW/dT, к контролю чувствительности импеданса ткани к нагреву dW/dZ, что позволяет более точно определить момент достижения необходимой для абляции температуры и осуществления перехода в режим поддержания постоянного уровня импеданса. И установление длительности работы в режиме поддержания постоянного уровня импеданса в зависимости от толщины ткани.
Результатом является повышение надежности трансмурального повреждения ткани при снижении общего времени абляции.
Таким образом, проведение абляции миокарда с соблюдением условий описанных в патенте RU2691845 C1 и дополнительно с учётом оценки толщины ткани и установления скорости нагрева в зависимости от толщины ткани, осуществления перехода в режим поддержания постоянного уровня импеданса при наступлении критерия (dW/dZ)>Kи последующем регулированием мощности воздействия позволяющим поддерживать импеданс ткани на неизменном уровне в течение времени выравнивания ТВ, устанавливаемым пропорционально толщине ткани, будут свидетельствовать о трансмуральном поражении обрабатываемого участка миокарда.
Из более ранних исследований известно, что в соответствии с характерной кривой импеданса ткани, импеданс ткани по мере нагревания падает, затем при достижении температуры около 70 °C падение прекращается, и при дальнейшем нагревании, по мере высушивания ткани начинает расти.
При этом, если проводить нагревание заданного объема ткани с заданной теплоемкостью, то для достижения определенной температуры ткани, а следовательно, и определенного снижения импеданса ткани, необходимо затратить определенное количество энергии. При сопоставимых условиях воздействия, в данном случае одном и том же инструменте для абляции, и одной и той же площади электродов, разное количество затраченной энергии на нагревание ткани до заданной температуры будет указывать на разный объем ткани находящейся между электродами.
В процессе воздействия, возможно, что ткань зажата не по всей длине электродов, а только по части длины.
Зажатый один и тот же объем ткани при меньшей длине будет характеризоваться большей толщиной и большим импедансом. Следовательно, применительно к определенному инструменту с определенным размером электродов, соотношение начального импеданса к затраченной энергии, необходимой для заданного снижения импеданса, будет отражать толщину зажатого между электродами участка ткани.
К примеру, вдвое меньшая длина (а, следовательно, и площадь) контакта ткани с электродами, при том же объеме ткани будет характеризоваться вдвое большей толщиной и вчетверо большим импедансом.
Таким образом, применительно к конкретным сопоставимым ситуациям, в частности применительно к определенному инструменту с определенным размером электродов, по соотношению начального импеданса ткани к количеству затраченной энергии для достижения заданного снижения импеданса ткани, определяем относительную толщину ткани, находящейся между электродами.
В эксперименте для проведения абляции, согласно предлагаемого в настоящем изобретении способа, использовали следующий алгоритм:
1. После старта с минимальной, безопасной скоростью нагрева ждем падения импеданса до заданного значения 0,8-0,9, предпочтительно 0,85, от Zнач., dZ/dt=Zнач.*k1, где k1 – определяет скорость нагрева (изменения импеданса). Падение импеданса до 0.85 от значения Zнач. соответствует достижению определенной температуры ткани.
2. Вычисляем энергию, выделенную в ткани для достижения такого изменения импеданса (температуры). Чем больше объем ткани, тем больше энергии нужно затратить на ее нагрев до заданной температуры. Скорость нагрева (k1) обратно пропорциональна затраченной энергии и обратно пропорциональна импедансу. Чем больше энергии пришлось затратить на нагрев ткани, тем больше ее толщина или чем больше импеданс Zнач. при одинаковой затраченной энергии, тем больше толщина.
Таким образом, по результатам участка кривой импеданса от Zнач. до 0.85*Z оцениваем толщину ткани и вычисляем новое значение скорости (k1).
Формула для вычисления нового значения имеет вид: k1~1/(Z*E).
3. Проводим абляцию, если допускает толщина ткани, с увеличенной обратно пропорционально толщине ткани скоростью нагрева (скоростью снижения импеданса).
4. После достижения заданного значения критерия dW/dZ > k5=5 переходим в режим поддержания постоянного уровня импеданса (плато). Диапазон k5 = от 2 до 10, предпочтительно 5.
5. Запускаем таймер T2. Тонкую ткань быстрее нагреваем и меньше выравниваем температуру. Время выравнивания температуры (время на плато) обратно пропорционально k1 (скорости нагрева). Tв=k6/k1, где k6=0.04, диапазон от 0,02 до 0,06.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ.
Далее настоящее изобретение будет описано в виде примеров со ссылкой на сопровождающие чертежи, на которых:
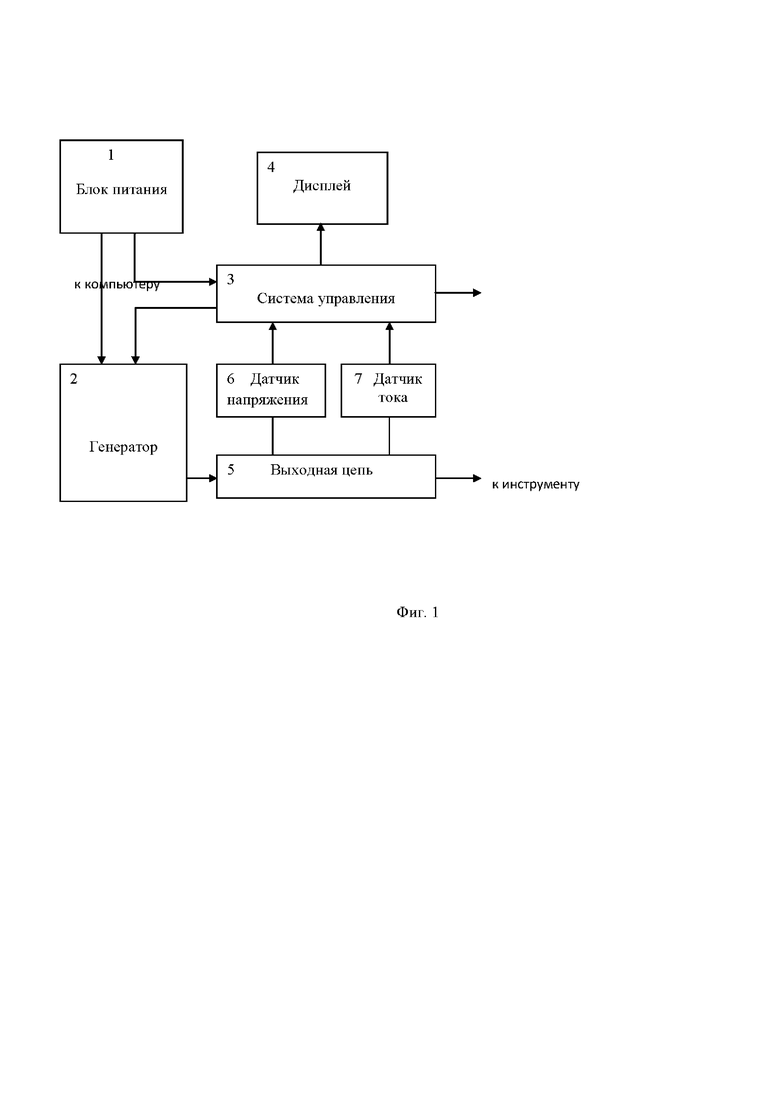
На Фиг. 1 представлена блок-схема устройства для осуществления предлагаемого способа.
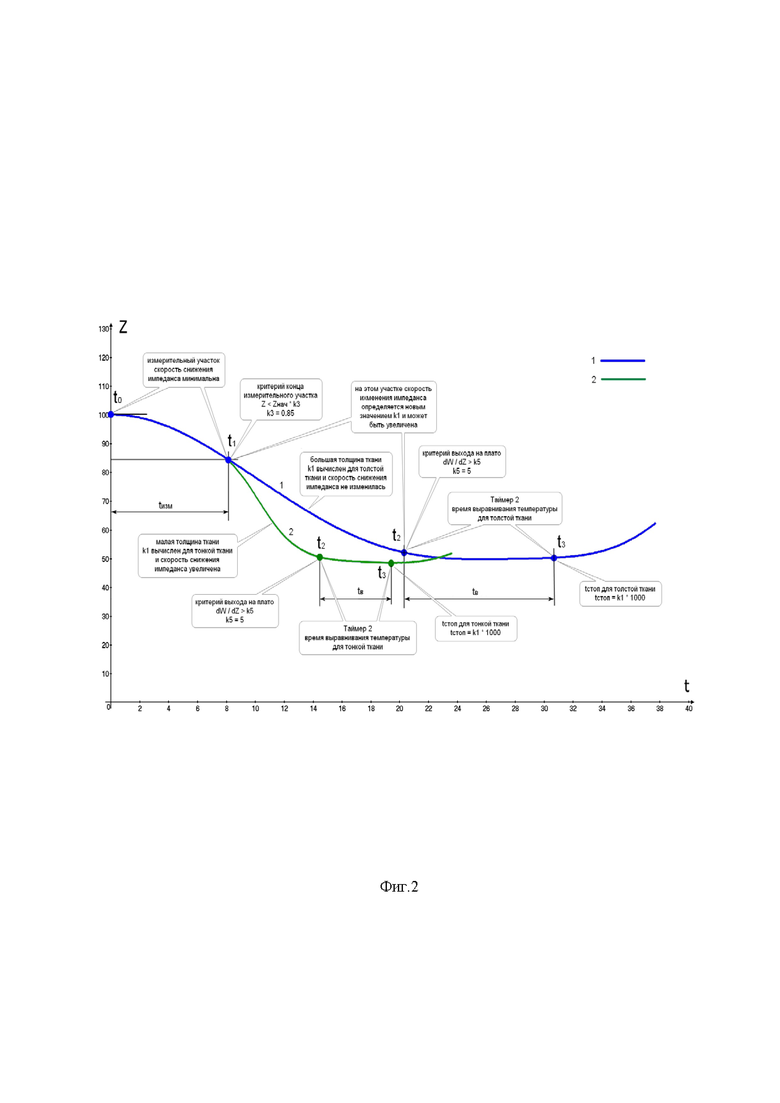
На Фиг. 2 приведен график зависимости импеданса от времени.
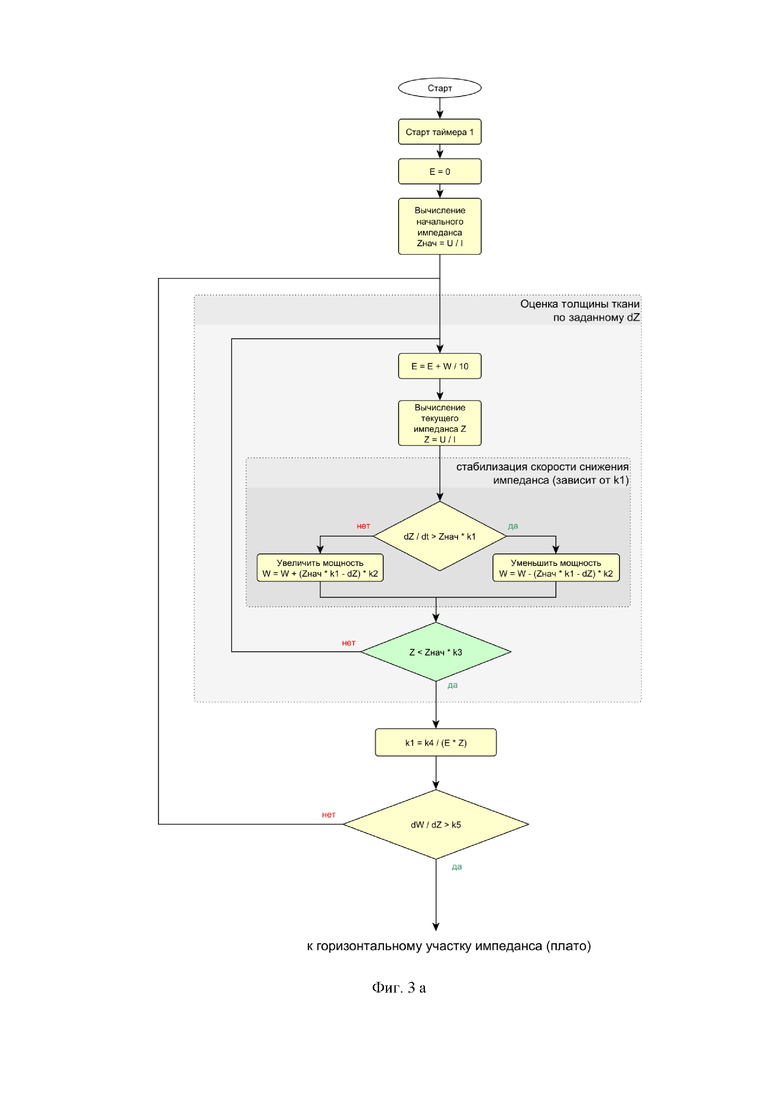
На Фиг. 3 представлен алгоритм работы устройства в виде блок-схемы для заявляемого способа:
фиг 3а – начало процесса абляции до перехода к горизонтальному участку импеданса (плато),
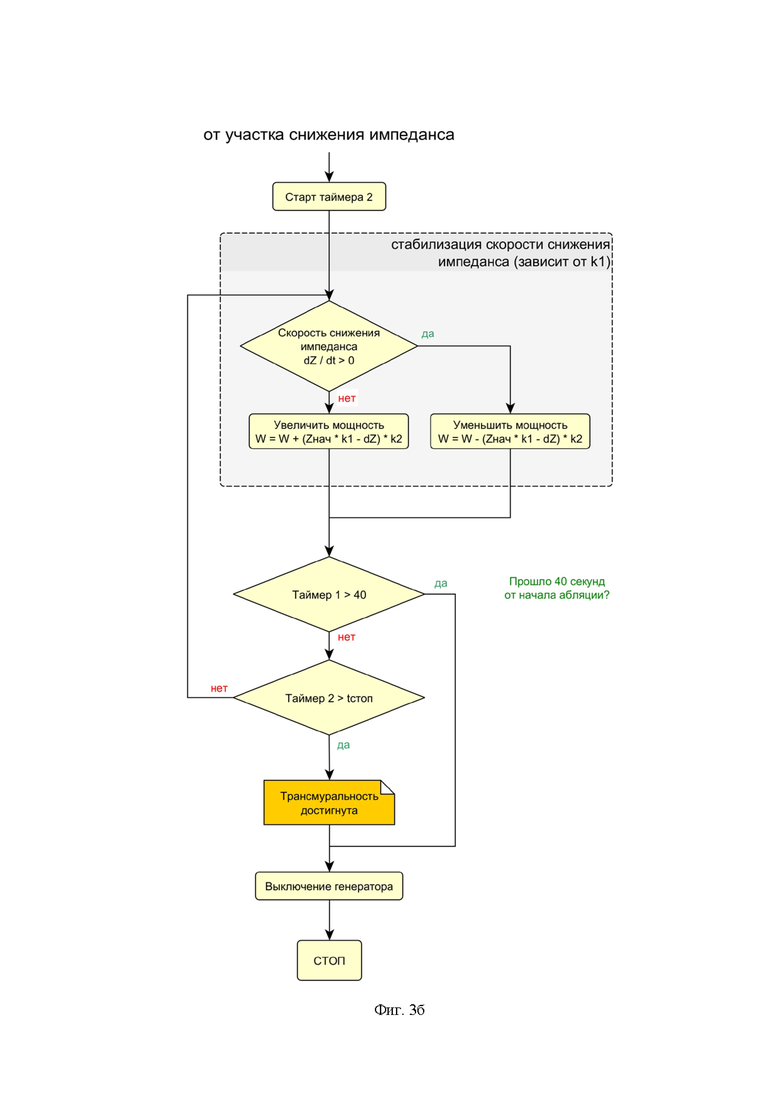
фиг. 3б – продолжение процесса абляции и его завершение.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Предлагаемое устройство для абляции биологических тканей содержит (Фиг. 1) блок питания 1, соединенный с высокочастотным генератором 2, системой управления 3 и дисплеем 4, а также содержит выходную цепь 5 для согласования генератора 2 с рабочим инструментом для абляции и датчик напряжения 6 и датчик тока 7, подключённые к выходной цепи 5 и соединенные с системой управления 3.
Блок питания 1: входное напряжение - 230 Вольт, 50 Герц, выходное напряжение: +48 Вольт, 4А, высокочастотный генератор 2 должен быть способным работать с диапазоном активных нагрузок от 10 до 400 Ом в биполярном режиме. Обеспечивать мощности: от 1 до 35 Вт, в соответствии с управляющими сигналами системы управления. Выходная мощность не более 35 Вт на нагрузке 110 Ом. Максимальное напряжение на нагрузке не более 65 В. Форма сигнала – квазисинусоида, частота 440 КГц, допустимое отклонение частоты 11 КГц.
Дисплей 4 отображает цифровую, цифробуквенную и графическую информацию о ходе воздействия.
Выходная цепь 5 предназначена для фильтрации выходного напряжения и согласования с инструментом.
Датчик напряжения 6 предназначен для непрерывного преобразования текущего значения измеряемого напряжения переменного тока частотой 440кГц в аналоговый сигнал и обеспечивает гальваническую развязку от измеряемой цепи. Должен обеспечивать возможность измерения напряжений в интервале 0-100 В.
Датчик тока 7 предназначен для непрерывного преобразования текущего значения силы измеряемого переменного тока частотой 440кГц в аналоговый сигнал и обеспечивает гальваническую развязку от измеряемой цепи. Должен обеспечивать возможность измерения тока в интервале 0-1 А.
Система управления 3 оценивает сигналы датчика напряжения 6 и датчика тока 7, и на основе полученных данных, вырабатывает управляющий сигнал для генератора 2 высокой частоты. В соответствии с алгоритмом определения достижения эффекта трансмуральности (фиг. 3) определяет момент достижения трансмуральности, вырабатывает сигнал на отключение генератора 2, выдает звуковой сигнал для оповещения хирурга о достижении трансмуральности, отображает на дисплее 4 информацию о достижении трансмуральности.
В качестве инструмента использовали электроды для биполярной хирургической абляции. Материал электродов – контакт – бронза или иной электропроводящий материал. Конструкция электродов обеспечивает абляцию ткани на всем протяжении электрода. Длина проводящей части электрода, находящейся в контакте с тканью -70мм.
Для проведения абляции два электрода инструмента размещают в контакте с поверхностью биологической ткани таким образом, чтобы обрабатываемая ткань находилась между электродами, при этом между электродами и тканью обеспечивается надёжный электрический контакт.
После инициализации микропроцессора системы управления 3 первоначально на инструмент подают от генератора 2 высокочастотное напряжение от 5 до 25 В, предпочтительно 10 вольт, и определяют в первые 1-2 секунды начальный импеданс (Zнач.) зажатой между электродами ткани, и проверяют соответствие вычисленного значения импеданса разрешенному диапазону. Если вычисленный импеданс находится в диапазоне от 20 до 300 Ом, лучше от 40 до 200 Ом продолжают подачу напряжения.
С момента начала абляции через промежутки времени dt равные 100мс, в соответствии с первым участком графика приведенного на фиг. 2 (точка t0), микропроцессор начинает вычисление значения импеданса ткани Z и скорости его изменения, мощности W и скорости её изменения, а также подсчет отданной в нагрузку энергии E.
Микропроцессор устанавливает мощность от 5 до 10Вт и подсчитывает количество отданной энергии по формуле: E=E+W/10, вычисляет текущий импеданс (Z=U/I) и стабилизирует заданную скорость снижения импеданса (зависит от коэффициента k1 – задаёт скорость снижения импеданса) на участке графика от точки t0 до точки t1 (фиг.2).
После старта изначально задают низкую (минимальную) скорость нагрева (снижения импеданса): заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %. Для данного диапазона значений скорости снижения импеданса выбирают k1=от 0,002 до 0,01, при dt=0.1 секунды, т.е. k1 устанавливают k1=0,005.
Также микропроцессор, с момента начала абляции, вычисляет скорость изменения подаваемой на инструмент мощности dW/dt и регулирует мощность для поддержания заданной скорости снижения импеданса на участке от точки t0 до точки t1 (измерительный участок для оценки толщины ткани на фиг.2), вычисляя мощность по формуле:
W=W±(Zнач.*k1-dZ)*k2, где k1=0,005 для заданной скорости 5% в секунду, dZ - изменение импеданса за время dt, k2 от 0,2 до 0,8– шаг изменения мощности.
Если скорость снижения dZ/dt выше 5% в секунду, микропроцессор уменьшает мощность пропорционально отклонению скорости до восстановления скорости снижения импеданса на уровне 5% в секунду. Если скорость снижения импеданса dZ/dt ниже 5% в секунду, микропроцессор увеличивает мощность пропорционально отклонению скорости до восстановления скорости снижения импеданса на уровне 5% в секунду и далее управляет мощностью, поддерживая скорость падения импеданса неизменной на уровне 5% в секундудо достижения величины падения импеданса, составляющей 0,8–0,9 от начального его значения, предпочтительно 0,85 от Zнач. (точка t1 на графике фиг.2).
По результатам измерительного участка от точки t0 до точки t1 (фиг.2), т.е. достижения изменения (снижения) значения импеданса в k3 раз (k3=0,85) от Zнач., микропроцессор пересчитывает коэффициент k1 с учётом толщины ткани по формуле:
k1=k4/(E*Z),
где k4 – коэффициент пропорциональности между k1 и толщиной ткани в условных единицах, составляющий от 35 до 50, принятый 43;
Коэффициент k3 – это критерий изменения импеданса для оценки толщины ткани, выбирают в диапазоне от 0,8 до 0,9, предпочтительно, 0,85 от начального значения импеданса (точка t1 на кривой импеданса, где Z<Zнач.*k3); E – отданная в нагрузку энергия.
Скорость нагрева ткани при пересчёте k1 должна быть увеличена, если обрабатываемая ткань тонкая. Т.е. на участке кривой импеданса от точки t1 до выхода на плато (точка t2 – кривая 2 на фиг. 2) скорость нагрева определяется новым значением k1.
Микропроцессор также контролирует отношение dW/dZ и при значении dW/dZ>k5 переходят в режим поддержания постоянного уровня импеданса (выход на плато – точка t2 на кривой импеданса). k5 - критерий выхода на горизонтальный участок, диапазон составляет от 2 до 10, предпочтительно 5.
Запускается таймер Т2. Таймер устанавливает время выравнивания температуры (время на плато) пропорционально толщине ткани и обратно пропорционально k1. Tв=k6/k1, где k6=0,04, диапазон от 0,02 до 0,06.
При этом на плато контролируют мощность, увеличивая или уменьшая её в зависимости от колебаний импеданса Z, чтобы не допустить чрезмерного нагрева ткани. Различная плотность тока в ткани приводит к неравномерному выделению энергии и разной температуре участков ткани. Для компенсации разницы температур необходимо некоторое время поддерживать ткань при достигнутой максимальной температуре. Поддерживая импеданс на неизменном уровне регулировкой мощности, аппарат поддерживает среднюю температуру ткани неизменной. При этом происходит перераспределение и выравнивание температуры между соседними участками ткани вследствие теплопередачи.
Микропроцессор выводит сообщение о достижении трансмурального поражения ткани и прекращает работу генератора:
– по истечении времени, формируемого таймером T2>t стоп (точка t3 на фиг. 2) после осуществления перехода в режим поддержания постоянного уровня импеданса и определяемого: t стоп=k6/k1, при условии, что k1=от 0.002 до 0.01, а k6=от 0.02 до 0.06.
В таблице 1 приведены несколько вариантов расчёта изменения скорости нагрева для разных толщин тканей:
Таблица 1
Ниже приведены примеры выполнения заявляемого способа абляции для случаев двух разных толщин зажатой между электродами ткани (поз. 1 и 5 из Таблицы ) с иллюстрацией кривых импеданса на фиг.2.
Пример 1 (случай абляции для ткани большей толщины, толстая ткань – кривая 1 на фиг. 2, поз. №1 в Таблице 1).
На старте:
Zнач=100 Ом; k1=0,005; k2=0,5; k3=0,85; k4=43; k5=5.
В точке Z=0,85*Zнач. отданная энергия E=100Дж.
Вычисленный k1=0,005, следовательно, скорость падения импеданса dZ/dt=5 Ом/с не изменится. Таймер 2 (время плато) = 7,9 секунды.
Пример 2 (случай абляции для ткани меньшей толщины, тонкая ткань – кривая 2 на фиг. 2 – позиция № 5 в Таблице 1).
На старте:
Zнач.=100 Ом; k1=0,005; k2=0,5; k3=0,85; k4=43; k5=5.
В точке Z=0,85*Zнач. отданная энергия E=50Дж.
Вычисленный k1=0,01, следовательно, скорость падения импеданса возрастет до dZ/dt =10 Ом/с. Скорость нагрева ткани увеличится и время абляции уменьшится. Таймер 2 (время плато) = 4 секунды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ (2 ВАРИАНТА) | 2021 |
|
RU2780122C1 |
| СПОСОБ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2691845C1 |
| НАПРАВЛЯЕМАЯ АБЛЯЦИЯ СЕРДЦА С ИСПОЛЬЗОВАНИЕМ МАШИННОГО ОБУЧЕНИЯ (ML) | 2020 |
|
RU2779871C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ АБЛЯЦИИ НА ОСНОВЕ КОНТАКТНОЙ СИЛЫ | 2013 |
|
RU2648213C2 |
| АППАРАТУРА И СПОСОБ КОНТРОЛЯ ХАРАКТЕРИСТИК СЕРДЕЧНОЙ ДЕЯТЕЛЬНОСТИ | 1997 |
|
RU2195168C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ | 2013 |
|
RU2657960C2 |
| ПРОТОКОЛ ОСТОРОЖНОЙ НЕОБРАТИМОЙ ЭЛЕКТРОПОРАЦИИ (НЭП) ДЛЯ ПРЕДОТВРАЩЕНИЯ ОБРАЗОВАНИЯ ПУЗЫРЬКОВ | 2021 |
|
RU2774573C1 |
| НЕОБРАТИМАЯ ЭЛЕКТРОПОРАЦИЯ (НЭП) НА ОСНОВЕ ИМПЕДАНСА | 2021 |
|
RU2770452C1 |
| БИПОЛЯРНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ДЕСТРУКЦИИ МИОКАРДА ПРЕДСЕРДИЙ ПРИ ЛЕЧЕНИИ НАДЖЕЛУДОЧКОВЫХ АРИТМИЙ | 2016 |
|
RU2665627C2 |
Группа изобретений относится к медицине, а именно к способу и устройствам для абляции миокарда. При осуществлении способа размещают два электрода устройства в контакте с поверхностью ткани, подают на электроды напряжение и контролируют импеданс ткани и скорость его изменения и мощность и скорость её изменения. Проверяют начальные условия путем вычисления начального значения импеданса и нагревают обрабатываемую ткань до достижения величины заданного значения снижения импеданса. Подсчитывают энергию, отданную в нагрузку для снижения импеданса до заданного значения, оценивают толщину ткани, зажатой между электродами, и отношение скорости изменения текущей мощности к скорости изменения импеданса относительно порогового значения. Устанавливают длительность работы в режиме поддержания постоянного уровня импеданса в зависимости от толщины ткани и оценивают достижение трансмуральности по истечении времени поддержания постоянного уровня импеданса на плато в виде горизонтального участка кривой импеданса, определённого в зависимости от полученной оценки толщины ткани. Устройство предназначено для выполнения указанного способа. Достигается повышение надежности трансмурального повреждения ткани при снижении общего времени абляции. 3 н. и 6 з.п. ф-лы, 4 ил., 1 табл.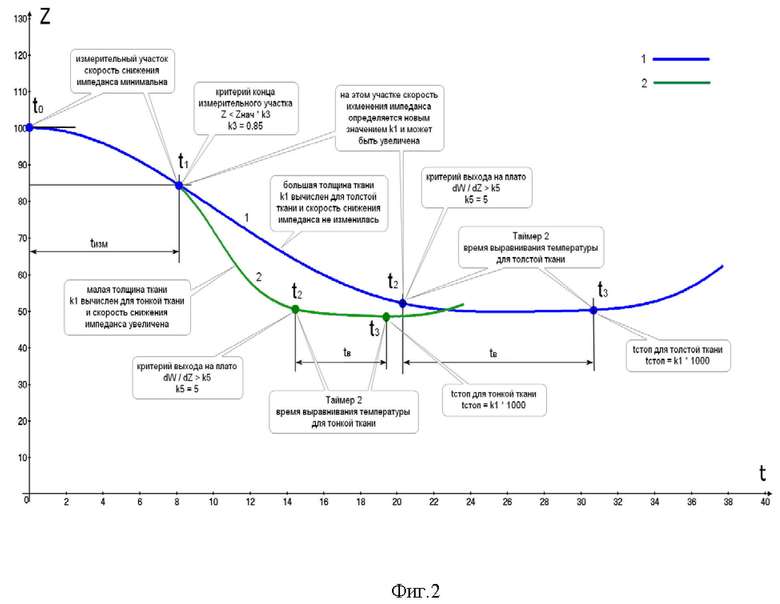
1. Способ абляции миокарда, характеризующийся тем, что включает:
– подключение устройства биполярной абляции к источнику питания, причем устройство биполярной абляции имеет два электрода;
– размещение двух электродов устройства для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения и постоянный контроль импеданса ткани и скорости его изменения, мощности и скорости её изменения в зависимости от времени;
– проверку начальных условий путем вычисления начального значения импеданса и нагрев обрабатываемой ткани с заданной минимальной скоростью до достижения величины заданного значения снижения импеданса, составляющей 0,8–0,9 от начального значения импеданса,
– подсчёт суммарной энергии, отданной в нагрузку для снижения импеданса до упомянутого заданного значения;
– оценку толщины ткани зажатой между электродами в зависимости от произведения отданной в нагрузку упомянутой суммарной энергии и текущего значения импеданса, причем в зависимости от полученной оценки толщины либо оставляют скорость нагрева обрабатываемой ткани, зажатой между электродами, первоначально заданной, либо её увеличивают;
– оценку отношения скорости изменения текущей мощности к скорости изменения импеданса относительно предварительно установленного порогового значения, при достижении которого осуществляют выход на плато путем перехода в режим поддержания постоянного уровня импеданса;
– установление длительности работы в режиме поддержания постоянного уровня импеданса в зависимости от толщины ткани;
– оценку достижения трансмуральности по истечении времени поддержания постоянного уровня импеданса на плато в виде горизонтального участка кривой импеданса, определённого в зависимости от полученной оценки толщины ткани.
2. Способ по п. 1, отличающийся тем, что для оценки толщины обрабатываемой ткани первоначально выбирают мощность от 5 до 10Вт.
3. Способ по п. 1 или 2, отличающийся тем, что заданное значение снижения импеданса предпочтительно выбирают равным 0,85 от начального значения импеданса.
4. Способ по п. 1 или 2, отличающийся тем, что заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
5. Способ по п. 1 или 2, отличающийся тем, что поддержание заданного значения скорости снижения импеданса и поддержание постоянного уровня импеданса в течение времени нахождения на плато осуществляют путем изменения мощности.
6. Способ по п. 1 или 2, отличающийся тем, что скорость изменения мощности выбирают из диапазона от 1 до 5 Вт/с и предпочтительно не более 3–5 Вт/с.
7. Способ по п. 1 или 2, отличающийся тем, что для вычисления начального значения импеданса на электроды подают напряжение от 5 до 25 В, предпочтительно от 10 до 20 В.
8. Устройство для абляции миокарда, характеризующееся тем, что содержит блок питания, соединенный с высокочастотным генератором, системой управления, включающей микропроцессор, и дисплеем, подключенным к системе управления, а также содержащее выходную цепь для согласования генератора с рабочим инструментом для абляции, датчик напряжения и датчик тока, подключённые к выходной цепи и соединенные с системой управления, при этом микропроцессор выполнен с возможностью:
– вычисления значения импеданса ткани и скорости его изменения, вычисления мощности и скорости её изменения, а также подсчета отданной в нагрузку энергии;
– оценки толщины ткани, зажатой между электродами после проверки начальных условий, путем вычисления начального значения импеданса и до достижения величины заданного значения снижения импеданса от начального значения импеданса;
– изменения заданного значения скорости снижения импеданса либо оставления её первоначально заданной в зависимости от результата оценки толщины ткани;
– оценки отношения скорости изменения текущей мощности к скорости изменения импеданса относительно предварительно установленного порогового значения, при достижении которого осуществляют выход на плато путем перехода в режим поддержания постоянного уровня импеданса;
– поддержания постоянного уровня импеданса при выходе на плато в течение времени, определяемого в зависимости от толщины ткани;
– индикации вывода о достижении трансмуральности;
– отключения генератора на основании вывода о достижении трансмуральности или по таймеру.
9. Устройство для абляции миокарда, характеризующееся тем, что приспособлено для осуществления способа по любому из пп. 1-7.
| СПОСОБ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2691845C1 |
| БИПОЛЯРНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ДЕСТРУКЦИИ МИОКАРДА ПРЕДСЕРДИЙ ПРИ ЛЕЧЕНИИ НАДЖЕЛУДОЧКОВЫХ АРИТМИЙ | 2016 |
|
RU2665627C2 |
| WO 2006080982 A1, 03.08.2006 | |||
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2594809C2 |
| ОПТОАКУСТИЧЕСКИЙ МОНИТОРИНГ В РЕАЛЬНОМ ВРЕМЕНИ С ПОМОЩЬЮ ЭЛЕКТРОФИЗИОЛОГИЧЕСКИХ КАТЕТЕРОВ | 2007 |
|
RU2464926C2 |
| US 20130072926 A1, 21.03.2013 | |||
| EP 3375397 A1, 19.09.2018. | |||

