Область техники, к которой относится изобретение
Нижеследующее относится в целом к областям медицинской визуализации, позиционирования изображения, коррекции движения изображения и связанным с ними областям.
Уровень техники
Обнаружение движения в реальном времени и точное отслеживание положения пациента – важный вопрос медицинской визуализации и один из ключевых в точной медицине. Некоторый прогресс был достигнут при использовании устройств видео сопровождения в реальном времени. Однако эти устройства и технологии требуют дорогостоящей чувствительной оптики и электроники с высокими разрешением и глубиной, точного наведения, а также сложной и представляющей трудность компьютерной обработки полученных видеоматериалов.
Кроме того, отслеживание характера дыхания позволяет корректировать дыхательные движения или синхронизируемые с дыхательными движения во время сканирования пациента (например, при компьютерной томографии (КТ) и позитронно-эмиссионной томографии (ПЭТ)). Простое, но надежное обнаружение и отслеживание дыхательных движений может значительно улучшить качество изображения и количественную оценку путем использования информации слежения при сборе и обработке данных. В традиционных методах применяются различные оптические устройства или датчики давления в сильфонах, с использованием отведений ЭКГ для обнаружения сердечных сокращений и дыхательных движений и т.д.
Ниже раскрыты новые и усовершенствованные системы и способы для решения этих задач.
Раскрытие сущности изобретения
В одном из раскрытых аспектов устройство для лежания на нем пациента во время процедуры медицинской визуализации включает в себя основной корпус. На верхней поверхности основного корпуса расположена матрица датчиков давления, выполненных с возможностью измерения давления по верхней поверхности. Для считывания показаний датчиков давления функционально подключен по меньшей мере один электронный процессор. Долговременный носитель данных хранит инструкции, предусматривающие возможность их считывания исполнения по меньшей мере одним электронным процессором, для использования матрицы датчиков давления для выполнения по меньшей мере одного из: операции оценки прогиба; операции оценки движения; и операции мониторинга дыхания.
В другом раскрытом аспекте устройство для лежания на нем пациента во время процедуры медицинской визуализации, включает в себя устройство формирования изображения. Основной корпус выполнен с возможностью загрузки пациента в устройство формирования изображения для формирования изображения. Матрица датчиков давления, расположенных на верхней поверхности опоры для пациента, выполнена с возможностью измерения давления по верхней поверхности. Для считывания показаний датчиков давления функционально подключен по меньшей мере один электронный процессор. Долговременный носитель данных хранит инструкции, предусматривающие возможность их считывания исполнения по меньшей мере одним электронным процессором, для использования матрицы датчиков давления для выполнения по меньшей мере одного из следующего: операция оценки прогиба; операция оценки движения; и операция мониторинга дыхания.
В другом раскрытом аспекте способ мониторинга пациента во время процедуры получения изображения включает в себя следующее: выполняют считывание показаний датчиков давления, контактирующих с частью тела пациента на верхней поверхности основного корпуса, для получения данных давления; и на основании полученных данных давления оценивают прогиб основного корпуса.
Одно из преимуществ заключается в обеспечении системы для точной оценки положения и движения пациента, проходящего визуализацию.
Другое преимущество состоит в обеспечении контекстно-связанного корректирующего действия в ответ на обнаруживаемое движение пациента, проходящего визуализацию.
Другое преимущество заключается в отслеживании информации о дыхании без присоединения дополнительного устройства к пациенту, что применимо для мониторинга дыхания пациента как в положении лежа на животе (то есть лицом вниз), либо лежа на спине (то есть лицом вверх).
Еще одно преимущество заключается в точном определении значения прогиба стола в режиме реального времени.
Данный вариант осуществления может не обеспечивать ни одного, обеспечивать одно, два, более или все вышеперечисленные преимущества и/или может обеспечивать другие преимущества, которые станут очевидными для специалиста в данной области техники после прочтения и осмысления настоящего изобретения.
Краткое описание чертежей
Изобретение может принимать форму различных компонентов и их компоновок, а также различных шагов и их компоновок. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
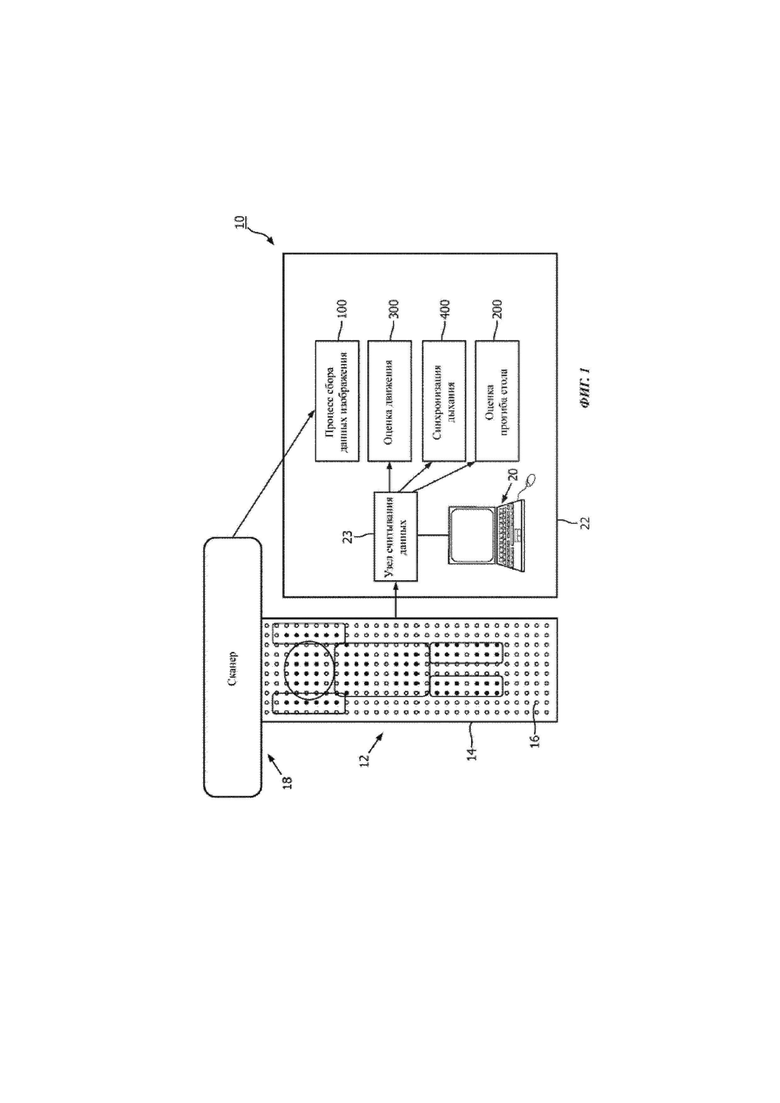
На фиг. 1 схематически показано устройство для лежания на нем пациента во время медицинской процедуры, в соответствии с одним из вариантов осуществления.
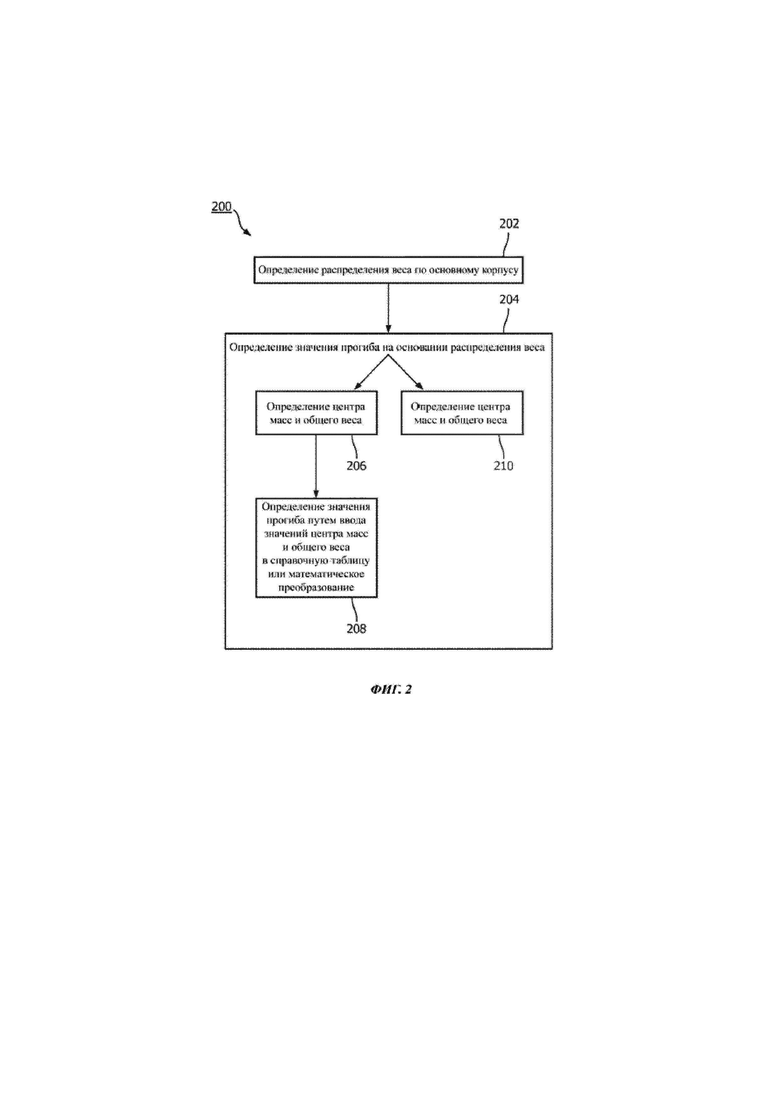
На фиг. 2 схематически показана блок-схема последовательности операций для одного примера работы устройства по фиг. 1.
На фиг. 3 схематически показана блок-схема последовательности операций для другого примера работы устройства по фиг. 1.
На фиг. 4 схематически показана блок-схема последовательности операций для другого примера работы устройства по фиг. 1.
Осуществление изобретения
Ниже раскрыты различные варианты осуществления, в которых для решения важных задач в области медицинской визуализации эффективно используется матрица датчиков давления, расположенных на столе для пациента. В некоторых иллюстративных вариантах осуществления датчики давления обнаруживают, какую часть тела переместил пациент (например, ногу или руку), время перемещения и, в некоторых вариантах осуществления, направление перемещения. Эта информация обеспечивает указания относительно необходимости повторного сканирования или применения поправки на движение к определенным частям данных.
На основании показаний давления также может отслеживать информацию о дыхании, без необходимости подключения какого-либо дополнительного устройства к пациенту. В некоторых вариантах осуществления измеряется сигнал зависимости величины давления от времени, по которому можно оценить дыхательный цикл. Преимущественно, этот подход эффективен даже в случае, когда пациент лежит на спине, когда грудная клетка поднимается от стола во время вдоха. Как определено в настоящем документе, расширение объема грудной клетки во время дыхательного цикла приводит к перераспределению массы тела, создающей силу, направленную вниз на стол пациента, величину которой можно измерить датчиками давления. Ожидается, что эта величина давления будет изменяться в зависимости от степени и направления расширения и сокращения грудной клетки, поэтому ожидается, что величина давления в зависимости от времени будет изменяться в зависимости от дыхательного цикла. Аналогичным образом предусмотрен мониторинг сердечного цикла посредством (высокочастотной составляющей) величины давления в зависимости от времени.
В некоторых вариантах осуществления показания датчика давления используются для более точной оценки прогиба стола. Прогиб происходит, когда опора для пациента (например, стол, платформа или другой основной корпус, поддерживающий пациента) находится в консольном положении. Например, в гибридной системе визуализации ПЭТ/КТ или ОФЭКТ (однофотонной эмиссионной компьютерной томографии)/КТ опора для пациента обычно включает в себя кушетку или что-либо подобное, имеющую деку (или платформу, или иным образом называемый основной корпус), которая перемещается в гентри КТ и (если перемещение продолжается) в гентри ПЭТ или ОФЭКТ. В такой конструкции дека или платформа могут быть консольными, при этом конец, который заходит в гентри КТ или ПЭТ/ОФЭКТ, не поддерживается. Этот неподдерживаемый конец может прогибаться под весом пациента. Прогиб зависит от жесткости деки или платформы, при этом общепризнанно, что он дополнительно зависит от веса пациента, поддерживаемого декой или платформой. Однако, как определено в настоящем документе, прогиб более конкретно зависит от распределения веса, поддерживаемого декой или платформой. Таким образом, в раскрытых здесь вариантах оценки прогиба матрица датчиков давления позволяет определять распределение веса по столу пациента - на основании этого распределения веса прогиб может быть оценен более точно. В одном подходе центр масс (ЦМ) и общий вес пациента используются для более точной оценки прогиба стола по сравнению с оценкой, основанной только на весе пациента. В другом подходе вычисляют суммарный эффект от вкладов в прогиб долей распределения веса, например, путем интегрирования или суммирования, чтобы оценить прогиб стола. Использование распределения веса, а не веса пациента, обеспечивает более точную оценку прогиба стола в зависимости от положения. Прогиб стола также измеряется в режиме реального времени, что является преимуществом, поскольку стол пациента обычно прогибается из-за веса пациента на возрастающую величину по мере захождения стола пациента в гентри для сканирования (например, с получением все более длинной консольной длины стола). Точно измеряя прогиб стола в режиме реального времени, можно получить необходимые поправочные коэффициенты для надлежащей коррекции изображений ПЭТ/КТ.
В этих подходах используют чувствительный к давлению слой, расположенный на верхней части стола пациента. Чувствительный к давлению слой может быть создан из сетки отдельных чувствительных к давлению ячеек или элементов. Массив датчиков давления покрывает по меньшей мере ту часть области поверхности стола пациента, которая ожидаемо может вступить в контакт с пациентом. Функционально подключают электронный процессор для считывания показаний датчиков давления и для интерпретации информации от датчиков и вычисления распределения веса пациента в режиме реального времени и другой информации, например, контура пациента для той части пациента, которая касается сенсорной матрицы, передавая ее дальше в цепочку реконструкции изображения. Матрица датчиков давления может быть выполнена как единое целое с верхней частью стола пациента (например, заделана в верхнюю поверхность стола пациента), или датчики давления могут быть прикреплены отдельно к крышке стола или оборудованной пластине, которую затем располагают над поверхность стола пациента с той же целью, что предпочтительно для обеспечения возможности модернизации существующего стола пациента без необходимости полностью переделывать/заменять уже выпущенные модели кушеток.
Для оценки движения можно использовать датчики, обнаруживающие, когда происходит перемещение, какая часть тела переместилась (на основании площади, занимаемой пациентом и предполагаемой анатомии), а также направления и величины перемещения. Например, датчики могут обнаружить, что пациент переместил левую ногу вправо. Эта информация может быть использована по-разному. В случае ПЭТ/КТ перемещение любой части тела, которая уже была визуализирована как ПЭТ, так и КТ, не является проблематичным. Если перемещенная часть тела еще не была визуализирована, то могут быть предприняты различные корректирующие действия. Если перемещение происходит во время визуализации перемещающейся части тела, то наборы данных визуализации, полученные до/после движения, каждый, реконструируется по отдельности и, опционально, объединяются позже путем пространственной приводки. Если перемещение происходит на ранней стадии визуализации части тела, то более ранние данные можно отбросить, и, опционально, время визуализации моно увеличить для компенсации ранее отброшенной части. Если перемещение происходит до начала ПЭТ-визуализации перемещенной части тела, но после КТ-визуализации перемещенной части тела, тогда предполагается попросить пациента переместить часть тела обратно в исходное положение. При выполнении такой «коррекции» можно использовать датчики давления, чтобы определить, когда часть тела вернулась в исходное положение.
Мониторинг дыхания с использованием датчиков давления основан на понимании того, что, даже если пациент лежит на спине (в положении лицом вверх), дыхание создает модуляцию величины давления, прикладываемого к столу. Таким образом, дыхательный цикл может быть выделен из кривой зависимости величины давления от времени, полученной датчиками давления, контактирующими с задней стороной лежащего на спине пациента. Мониторинг сердечного цикла также осуществляют с помощью этой техники.
Коррекция прогиба стола использует датчики давления для измерения распределения веса по столу, чтобы обеспечить более точную оценку прогиба по сравнению с оценками, основанными на общем весе пациента. Можно использовать различные подходы. В одном подходе центр масс (ЦМ) и общий вес определяют по измерениям датчика давления, и используют это в эмпирической справочной таблице или путем применения первопринципного уравнения отклонения пучка для определения прогиба стола. В более точном подходе справочную таблицу или уравнение отклонения пучка применяют на поэлементном основании для каждой составляющей веса, измеряемой каждым датчиком давления (или соседними группами датчиков давления), и тогда общий прогиб представляет собой сумму этих «местных» вкладов в прогиб. Предпочтительно, поскольку датчики давления следят за распределением веса в режиме реального времени, предусмотрена возможность изменения прогиба из-за движения пациента или изменения положения во время сеанса визуализации.
На фиг. 1 показано иллюстративное устройство 10 для лежания на нем пациента во время процедуры медицинской визуализации. Как показано на фиг. 1, устройство 10 включает в себя основной корпус 12. В одном примере основной корпус 12 может содержать стол для лежания на нем пациента. В другом примере основной корпус 12 может содержать верхнюю, покрывающую часть стола (т.е. без каких-либо ножек стола). В других примерах основной корпус 12 может содержать скамью или кушетку для лежания на нем пациента. Основной корпус 12 включает в себя верхнюю поверхность 14, на которую лежит пациент для процедуры визуализации.
На верхней поверхности 14 основного корпуса 12 расположена матрица датчиков 16 давления. Как показано на фиг. 1, датчики 16 давления распределены по длине и ширине верхней поверхности 14; хотя датчики давления могут быть расположены только на части верхней поверхности. Датчики 16 давления выполнены с возможностью непрерывного измерения давления по верхней поверхности 14. Например, датчики 16 давления могут измерять показания давления, когда пациент лежит на верхней поверхности 14. Датчики 16 давления измеряют показания давления в месте расположения различных частей тела пациента, которые находятся поверх датчиков. Датчики 16 давления могут использовать практически любой тип технологии измерения давления, например, это могут быть пьезорезистивные тензодатчики, емкостные датчики давления, в которых давление сжимающе уменьшает диэлектрическую толщину конденсатора, электромагнитные датчики, в которых вызванное давлением смещение диафрагмы или другого подвижного элемента определяется как индуктивное изменение или тому подобное, пьезоэлектрический датчик, и т.д.
В некоторых примерах устройство 10 также может включать в себя устройство 18 визуализации или работать с устройством 18 визуализации, таким как гибридный сканер позитронно-эмиссионной томографии (ПЭТ)/компьютерной томографии (КТ), выполненный с возможностью получения изображений пациента, когда пациент лежит на верхней поверхности 14 основного корпуса 12. Однако следует иметь в виду, что устройство 18 визуализации может, в более общем случае, представлять собой сканер любого подходящего метода визуализации (например, магнитный резонанс, гамма-камера для однофотонной эмиссионной компьютерной томографии, рентгеновское излучение и т.п.). Компьютер 20 или другое электронное устройство, включающее в себя электронный процессор 22, электрически связан с датчиками 16 давления. Компьютер 20 включает в себя по меньшей мере один электронный процессор 22, который включает в себя узел 23 считывания показаний датчика давления или функционально связан с ним, чтобы считывать показания датчика 16 давления. По меньшей мере один электронный процессор 22 функционально соединен с долговременным носителем данных, который хранит инструкции, предусматривающие возможность их считывания исполнения электронным процессором 22 для выполнения вышеуказанных операций, включая управление устройством 18 визуализации для выполнения процесса 100 сбора данных визуализации. Кроме того, долговременный носитель данных может хранить инструкции, предусматривающие возможность их считывания исполнения электронным процессором 22, для выполнения одной или более операций при приеме значений давления от датчиков 16 давления, включая, например, по меньшей мере одно из (1) операции 200 оценки прогиба; (2) операции 300 оценки движения; и (3) операция 400 мониторинга дыхания (и, опционально, синхронизации с дыханием), каждая из которых более подробно раскрыта ниже. Долговременный носитель данных может, например, содержать жесткий диск, RAID-массив (избыточный массив независимых дисков) или другой магнитный носитель данных; твердотельный накопитель, флэш-накопитель, электрически стираемое перепрограммируемое запоминающее устройство (ЭСППЗУ) или другое электронное запоминающее устройство; оптический диск или другой оптический накопитель; их различные комбинации; и т.д.
Обратимся к фиг. 2, где в виде блок-схемы схематически показана операция 200 оценки прогиба. На этапе 202 определяют распределение веса по верхней поверхности 14 основного корпуса 12 на основании показаний датчиков 16 давления. На этапе 204 определяют значение прогиба основного корпуса 12 на основании распределения веса. Для этого, в одном примере, на этапе 206 для распределения веса определяют центр масс и общий вес. На этапе 208 значение прогиба определяют путем ввода значений центра масс и общего веса в справочную таблицу или математическое преобразование (например, сохраненное на долговременном носителе данных, читаемом компьютером 20). В другом примере, на этапе 210 значение прогиба определяют путем интегрирования или суммирования вкладов в прогиб долей веса тела пациента по распределению веса. После оценки значения прогиба можно использовать указанное значение прогиба для коррекции данных визуализации для положения пациента на верхней поверхности 14 основного корпуса 12 во время процедуры визуализации. В другом рассматриваемом варианте осуществления такую поправку на прогиб не выполняют, а вместо этого выводят предупреждение о чрезмерном прогибе, например, на дисплее компьютера 20, если прогиб превышает некоторое аварийное пороговое значение.
Обратимся к фиг. 3, где в виде блок-схемы схематически показана операция 300 оценки движения. Эта оценка 300 движения может быть эффективно выполнена, например, во время выполнения процесса 100 сбора данных визуализации, для обнаружения произвольного движения пациента и, при необходимости, для выполнения коррекции такого движения. На этапе 302 идентифицируют часть тела пациента, которая перемещается на верхней поверхности 14 во время процедуры визуализации, и определяют время перемещения части тела пациента. На опциональном этапе 304 определяют направление и величину части тела, которая переместилась у пациента. На этапе 306 процесс 100 сбора данных визуализации, выполняемый сканером 18 под управлением электронного процессора 22, прерывают или прекращают в отношении получения изображений пациента, и выдают, например, путем отображения на дисплее компьютера 20, запрос на возвращение части тела пациента в исходное положение. На этапе 308 процессор 22 программируют на постоянное (или через короткие интервалы) считывание показаний датчиков 16 давления, чтобы определить, когда перемещаемая часть тела пациента вернулась в ее исходное положение. Для этого распределение давления, записанное до события 302 обнаружения перемещения, сравнивают с распределением давления, считываемым в текущий момент, и, когда они будут согласованы с выбранным допуском, считают, что пациент переместил часть тела обратно в исходное положение. В некоторых вариантах осуществления могут выдаваться дополнительные указания - например, если обнаружено, что часть тела сместилась ближе к своему исходному положению, но все еще смещена на пять (например) сантиметров вправо от ее первоначального положения, тогда может быть выдано дополнительное указание, требующее, чтобы пациент переместил часть тела (например, ногу или руку) еще на пять сантиметров влево. На шаге 310, как только процессор 22 обнаружит, что часть тела пациента вернулась в исходное положение, сканер 18 возобновляет сбор данных визуализации.
В одном из вариантов осуществление коррекцию выполняют путем рассмотрения влияния перемещенной части тела в контексте процесса 100 сбора данных визуализации. В этом варианте осуществления время перемещения, определенное на этапе 302, сравнивают с состоянием хода выполнения процесса 100 сбора данных визуализации. В случае сбора данных от сканирования всего тела типична последовательность выполнения визуализации от головы к ногам, либо непрерывно либо с определенным количеством шагов. В таком случае, если перемещенная часть тела уже была визуализирована, перемещение не имеет значения, и никаких действий не предпринимается. С другой стороны, если перемещенная часть тела еще не была отсканирована или нуждается в дополнительном сканировании, то требуется некоторая коррекция. Это может включать в себя процесс, показанный на фиг. 3, в результате которого пациент получает указание переместить часть тела обратно в исходное положение. В другом подходе коррекции, если направление и расстояние перемещения части тела определены на этапе 304 (например, путем сравнения распределений веса, полученных до и после обнаружения перемещения на этапе 302), то данные визуализации, полученные до и после обнаруженного на этапе 302 перемещения можно реконструировать отдельно, а затем можно выполнить пространственную приводку двух результирующих изображений с использованием информации о направлении перемещения и расстоянии из этапа 304 в качестве исходных значений для настройки пространственной приводки.
В другом предусмотренном подходе коррекции, если обнаружение 302 перемещения происходит на ранней стадии сбора данных, то данные визуализации, полученные до перемещения, можно отбросить. Опционально, процесс 100 сбора данных также можно продлить по времени, чтобы компенсировать потерю отброшенных данных визуализации. В еще одном предусмотренном подходе коррекции обнаружение 302 перемещения может привести к тому, что процесс 100 сбора данных будет полностью прерван и повторен, опционально - с выдачей сообщения, предписывающего пациенту оставаться неподвижным во время процесса 100 сбора данных визуализации.
Также предусмотрено, что инструкции, хранящиеся на долговременном носителе данных, включают в себя инструкции для выполнения любого выбранного из этих вариантов, при этом решение может быть принято на основании времени перемещения, обнаруженного на этапе 302, в контексте продолжающегося процесса 100 сбора данных визуализации. Например, если время обнаружения движения меньше некоторого порогового значения в процессе 100 сбора данных, то может применяться подход отбрасывания ранних данных; тогда как, если перемещение обнаружено после прохождения этого порогового значения времени в процессе 100 сбора данных, то может быть применен другой корректирующий подход, такой как прерывание и повторение процесса 100 сбора данных полностью или побуждение пациента изменить положение перемещенной части тела в соответствии с блок-схемой процесса на фиг. 3.
Выбор того, какое корректирующее действие предпринять, может также опционально зависеть от критичности перемещения части тела, например, перемещение ноги во время сканирования туловища может быть малозначимым (так что коррекция не выполняется); при этом перемещение нижней части руки во время такого сканирования туловища, вероятно, будет иметь небольшой эффект, который можно исправить, обеспечив возвращение нижней части руки в начальное положение в соответствии с подходом по фиг. 3; тогда как перемещение плеча, вероятно, окажет большое влияние на сканирование туловища и может потребовать наиболее инвазивной коррекции с прерыванием сканирования туловища и его повторением.
Обратимся к фиг. 4, где в виде блок-схемы схематически показана операция 400 мониторинга дыхания. Опять же, этот процесс 400 предпочтительно выполняется одновременно с выполнением процесса 100 сбора данных визуализации. На этапе 402 считывают показания датчиков 16 давления, контактирующих с частью тела пациента на верхней поверхности 14 основного корпуса 12, чтобы получить сигнал величины давления в зависимости от времени. На этапе 404 из сигнала величины давления в зависимости от времени выделяют сигнал дыхательного цикла. Это может включать в себя, например, фильтрацию сигнала величины давления в зависимости от времени для выделения компонента с частотой дыхания. На этапе 406 из сигнала величины давления в зависимости от времени опционально выделяют сигнал сердечного цикла, например, путем фильтрации, чтобы выделить компонент сигнала с частотой сердечного ритма. Дыхательный сигнал в зависимости от времени предпочтительно записывают и могут использовать для выполнения синхронизации дыхания с данными визуализации, полученными при одновременном выполнении процесса 100 сбора данных визуализации. Такую синхронизацию можно выполнять ретроспективно, например, с помощью присвоения временных меток данным визуализации (например, отдельным отсчетам в эмиссионной визуализации) по мере их сбора и последующего биннинга данных визуализации в бины дыхательной фазы на основании дыхательных фаз, отмеченных дыхательным сигналом. Альтернативно, в предусматриваемом процессе синхронизации с дыханием предусмотрено управление процессом 100 сбора данных визуализации для получения данных визуализации только тогда, когда цикл дыхания пациента находится в выбранной дыхательной фазе.
Эффективность процесса 400 мониторинга дыхания по фиг. 4 зависит от того, насколько хорошо величина давления отражает дыхание. Ожидается, что эта корреляция будет сильней для тех датчиков давления, которые контактируют с туловищем пациента. Соответственно, в некоторых вариантах осуществления на этапе 402 считывания давления считывают только с тех датчиков 16 давления, которые находятся в непосредственной близости от туловища. Кроме того, на этапе 404 предполагается выполнить процесс выбора для выделения дыхательного сигнала от датчика 16 давления, сигнал величины давления которого сильнее всех коррелирует с дыханием (или для выделения дыхательного сигнала от небольшой группы датчиков давления, чья величина давления сигналов сильнее всех коррелирует с дыханием). Это может быть сделано, например, путем преобразования величины давления в зависимости от времени в частотную область, например, с использованием преобразования Фурье и ранжирования датчиков 16 давления по силе сигнала в полосе частот, соответствующей вероятной частоте дыхания (например, взрослый в спокойном состоянии обычно делает около 12-20 вдохов в минуту, поэтому полоса частот вероятной частоты дыхания может быть в диапазоне 8-24 циклов/мин).
Аналогичная обработка может быть выполнена для этапа 406, чтобы улучшить обнаружение сигнала сердечного цикла. Опять же, предполагается, что датчики давления в непосредственной близости от туловища будут обеспечивать самый сильный сигнал сердечного цикла, и ранжирование датчиков в этом случае может быть по силе сигнала в вероятной полосе частот сердечного ритма, например, порядка 40-150 циклов/мин, что соответствует вероятному диапазону сердечного ритма для обычного взрослого человека.
Изобретение было раскрыто со ссылкой на предпочтительные варианты осуществления. Прочитав и уяснив вышеизложенное описание, другие лица могут прийти к модификациям и изменениям. Предполагается, что изобретение следует истолковывать как включающее в себя все такие модификации и изменения, если они входят в объем прилагаемой формулы изобретения или ее эквивалентов.

Группа изобретений относится к медицинской технике, а именно к устройству для лежания на нем пациента во время процедуры медицинской визуализации. Устройство содержит корпус, матрицу датчиков давления, электронный процессор, долговременный носитель данных. Датчики давления расположены на верхней поверхности корпуса и выполнены для измерения давления по верхней поверхности. Электронный процессор функционально подключен для считывания показаний датчиков давления. Долговременный носитель данных хранит инструкции для считывания и исполнения электронным процессором. Матрица датчиков давления используется для выполнения операции оценки прогиба. При этом операция оценки прогиба включает в себя определение величины прогиба путем интегрирования или суммирования вкладов в прогиб долей распределения веса по распределению веса. В другом варианте устройство для лежания на нем пациента содержит визуализирующее устройство. При этом корпус выполнен с возможностью загрузки пациента в визуализирующее устройство для визуализации. За счет оценки прогиба с использованием вычисления суммарного эффекта от вкладов в прогиб долей распределения веса обеспечивается более точная оценка прогиба в режиме реального времени, достигается более точная оценка положения и движения пациента, проходящего визуализацию, обеспечивается контекстно-связанное корректирующее действие в ответ на обнаруживаемое движение пациента, в том числе при применении мониторинга дыхания пациента лежа на животе и на спине, а также указание относительно необходимости повторного сканирования или применения поправки на движение к определенным частям данных. 2 н. и 12 з.п. ф-лы, 4 ил.
1. Устройство (10) для лежания на нем пациента во время процедуры медицинской визуализации, содержащее:
корпус (12);
матрицу датчиков (16) давления, расположенных на верхней поверхности (14) корпуса, причем датчики давления выполнены с возможностью измерения давления по верхней поверхности;
по меньшей мере один электронный процессор (22), функционально подключенный для считывания показаний датчиков давления; и
долговременный носитель данных, хранящий инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором, чтобы использовать матрицу датчиков давления для выполнения операции (200) оценки прогиба, причем операция (200) оценки прогиба включает в себя определение величины прогиба путем интегрирования или суммирования вкладов в прогиб долей распределения веса по распределению веса.
2. Устройство (10) по п. 1, в котором долговременный носитель данных хранит инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором (22), для выполнения операции (200) оценки поправки на прогиб, содержащей:
определение распределения веса по верхней поверхности (14) корпуса (12) на основании показаний датчиков (16) давления; и
определение величины прогиба, численно выражающей прогиб корпуса на основании распределения веса.
3. Устройство (10) по п. 2, в котором операция (200) оценки прогиба дополнительно включает в себя:
определение центра масс и общего веса распределения веса по верхней поверхности (14) корпуса (12); и
определение величины прогиба путем ввода центра масс и общего веса в справочную таблицу или математическое преобразование.
4. Устройство (10) по любому из пп. 1-3, в котором долговременный носитель данных хранит инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором (22), для выполнения операции (300) оценки движения, включающей в себя:
определение, с использованием матрицы датчиков (16) давления, того, какая часть тела пациента перемещается из исходного положения, и времени перемещения указанной части тела пациента из ее исходного положения,
причем операция (300) оценки движения дополнительно включает в себя:
определение направления и величины перемещения указанной части тела пациента.
5. Устройство (10) по п. 4, в котором операция (300) оценки движения дополнительно включает в себя:
прерывание сбора данных визуализации и генерирование запроса на возвращение переместившейся части тела пациента обратно в ее исходное положение; обнаружение, с помощью матрицы датчиков (16) давления, когда переместившаяся часть тела пациента вернется в свое исходное положение; и возобновление сбора данных визуализации после указанного обнаружения, причем, при обнаружении перемещения части тела пациента, по меньшей мере один электронный процессор (22) дополнительно запрограммирован для выполнения по меньшей мере одной корректирующей операции, выбранной из следующего: генерирование инструкции для пациента переместить перемещенную часть тела обратно в ее исходное положение;
раздельная реконструкция изображений, полученных до и после обнаружения перемещения;
отбрасывание изображений, полученных до обнаружения перемещения; и генерирование инструкции для возобновления получения изображений.
6. Устройство (10) по любому из пп. 1-5, в котором долговременный носитель данных хранит инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором (22), для выполнения операции (400) мониторинга дыхания, включающей в себя:
считывание показаний датчиков (16) давления, контактирующих с частью тела пациента на верхней поверхности (14) корпуса (12), чтобы получить сигнал зависимости величины давления от времени, и
выделение сигнала дыхательного цикла из сигнала зависимости величины давления от времени.
7. Устройство (10) по п. 6, в котором долговременный носитель данных дополнительно хранит инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором, для выполнения операции (406) мониторинга сердца, включая:
выделение сигнала сердечного цикла из сигнала зависимости величины давления от времени.
8. Устройство (10) для лежания на нем пациента во время процедуры медицинской визуализации, содержащее:
визуализирующее устройство (18);
корпус (12), выполненный с возможностью загрузки пациента в визуализирующее устройство для визуализации;
матрицу датчиков (16) давления, расположенных на верхней поверхности (14) корпуса, причем датчики давления выполнены с возможностью измерения давления по верхней поверхности;
по меньшей мере один электронный процессор (22), функционально подключенный для считывания показаний датчиков давления; и
долговременный носитель данных, хранящий инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором, для использования матрицы датчиков (16) давления для выполнения операции (200) оценки прогиба, причем операция (200) оценки прогиба включает в себя определение величины прогиба путем интегрирования или суммирования вкладов в прогиб долей распределения веса по распределению веса.
9. Устройство (10) по п. 8, в котором операция (200) оценки прогиба включает в себя: определение распределение веса по верхней поверхности (14) корпуса (12) на основании показаний датчиков (16) давления;
определение центра масс и общего веса распределения веса; и
определение величины прогиба, численно выражающей прогиб корпуса, путем ввода
центра масс и общего веса в справочную таблицу или математическое преобразование.
10. Устройство (10) по п. 8, в котором операция (200) корректировки прогиба включает в себя:
определение распределения веса по верхней поверхности (14) корпуса (12) на основании показаний датчиков (16) давления; и
определение величины прогиба путем интегрирования или суммирования вкладов в прогиб долей распределения веса по распределению веса.
11. Устройство (10) по любому из пп. 9-10, в котором операция (300) оценки движения включает в себя:
определение, с использованием матрицы датчиков (16) давления, того, какая часть тела пациента перемещается из исходного положения, и времени перемещения части тела пациента из ее исходного положения.
12. Устройство (10) по п. 11, в котором долговременный носитель данных дополнительно хранит инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором (22), чтобы управлять визуализирующим устройством (18) для выполнения процесса сбора данных визуализации, при этом операция (300) оценки движения дополнительно включает в себя: прекращение процесса сбора данных визуализации в ответ на определение того, что часть тела пациента переместилась из своего исходного положения; генерирование запроса на возвращение части тела пациента, переместившейся во время получения изображения, обратно в ее исходное положение;
обнаружение, с использованием матрицы датчиков (16) давления, когда переместившаяся часть тела пациента вернется в свое исходное положение; возобновление процесса сбора данных визуализации после обнаружения того, что переместившееся тело пациента вернулось в свое исходное положение.
13. Устройство (10) по п. 11, в котором долговременный носитель данных дополнительно хранит инструкции, предусматривающие возможность их считывания и исполнения по меньшей мере одним электронным процессором (22), чтобы:
управлять визуализирующим устройством (18) для выполнения процесса сбора данных визуализации;
определять, на основании перемещения части тела пациента из ее исходного положения и времени перемещения части тела пациента из ее исходного положения, то, были ли во время перемещения части тела пациента уже получены данные визуализации для перемещающейся части тела пациента в процессе сбора данных визуализации; и
во время перемещения части тела пациента прерывать или останавливать процесс получения данных изображения только в том случае, если в процессе сбора данных визуализации еще не были получены данные визуализации для перемещающейся части тела пациента.
14. Устройство (10) по любому из пп. 8-13, в котором операция (400) мониторинга дыхания включает в себя:
считывание показаний датчиков (16) давления, контактирующих с частью тела пациента на верхней поверхности (14) корпуса (12), чтобы получить сигнал зависимости величины давления от времени, и
выделение сигнала дыхательного цикла из сигнала зависимости величины давления от времени.
| US 2009129556 A1, 21.05.2009 | |||
| US 2002122575 A1, 05.09.2002 | |||
| US 2012310079 A1, 06.12.2012 | |||
| US 2006173273 A1, 03.08.2006 | |||
| RU 2012138465 A, 20.03.2014. |

