ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе формирования и к способу формирования, в частности к системе для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя и к способу, который применим к технической области беспилотной горной добычи.
УРОВЕНЬ ТЕХНИКИ
Беспилотная горная добыча на угольных шахтах - это передовая технология, применяемая в международной угледобывающей отрасли, являющаяся важным средством сокращения несчастных случаев и обеспечения безопасного производства, а также являющаяся эффективным способом достижения безопасной, эффективной и экологически чистой добычи на угольных шахтах в Китае. В настоящее время беспилотная горная добыча может быть реализована путем использования комбинации памяти резания и ручного удаленного вмешательства на очистных забоях, где геологические условия и структура угольного пласта относительно просты. Однако геологические условия и структура угольных пластов на большинстве горных выработок в Китае очень сложны (например, угольный пласт сильно колеблется, и есть опасные геологические структуры, такие как разломы и складки), что делает невозможным реализацию беспилотной горной добычи с существующими в предшествующем уровне техники технологиями.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая проблема: ввиду недостатков вышеупомянутой технологии настоящее изобретение обеспечивает систему для формирования высокоточной трехмерной навигационной карты полностью механизированного угольного очистного забоя и соответствующий способ, причем способ имеет простые этапы, удобен для применения, может обеспечивать полную автоматизацию и высокую точность.
Для достижения вышеупомянутой технической цели система для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя, предусмотренная в настоящем изобретении, содержит мобильную измерительную платформу, установленную на транспортном средстве, и пластовые сейсмографы, расположенные с двух сторон угольного пласта, подлежащего разработке, при этом пластовый сейсмограф содержит передатчики, расположенные с интервалами в верхней части выработки, и приемники, расположенные с интервалами в нижней части выработки, при этом приемники соединены друг с другом через сетевые кабели и подключены к беспроводному передатчику.
Мобильная измерительная платформа, установленная на транспортном средстве, снабжена процессором для приема данных, лазерным радаром, инерциальным навигационным устройством и георадаром, при этом процессор для приема данных и георадар закреплены над мобильной измерительной платформой, установленной на транспортном средстве, а лазерный радар закреплен над процессором для приема данных, инерциальное навигационное устройство закреплено в центре мобильной измерительной платформы, установленной на транспортном средстве, причем лазерный радар, инерциальное навигационное устройство и георадар передают данные процессору для приема данных через сетевые кабели, а приемник пластового сейсмографа передает данные процессору для приема данных через беспроводной передатчик.
Передатчики являются пластовыми передатчиками сейсмических сигналов, а приемники - пластовыми приемниками сейсмических сигналов, при этом пластовые приемники сейсмических сигналов передают данные процессору для приема данных через беспроводной передатчик, а пластовые передатчики сейсмических сигналов расположены в соответствии с пластовыми приемникам сейсмических сигналов для формирования последовательности обнаружения пластовых сейсмических сигналов.
Способ формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя включает следующие этапы:
а) перемещение мобильной измерительной платформы, установленной на транспортном средстве, с постоянной скоростью около 40 км/ч по верхней части выработки, левой поперечной части выработки, нижней части выработки и правой поперечной части выработки вокруг угольного пласта, подлежащего разработке;
b) перемещение процессора для приема данных в местоположение рядом с беспроводным передатчиком вместе с мобильной измерительной платформой, установленной на транспортном средстве, с получением посредством беспроводных сигналов геологических данных угольного пласта, подлежащего разработке, собранных пластовыми сейсмографами, причем геологические данные включают информацию о толщине угольного пласта, подлежащего разработке, изменении угла наклона угольного пласта и пространственных положениях опасных геологических структур;
непрерывное излучение лазерного луча из лазерного радара на поверхность кровли выработки и вычисление расстояния между поверхностью выработки и лазерным радаром в соответствии с разностью времени возврата принятого отраженного лазерного луча с формированием данных трехмерного облака точек выработки; передачу данных трехмерного облака точек от лазерного радара процессору для приема данных через сетевой кабель;
вычисление информации о местоположении, ориентации и траектории движения мобильной измерительной платформы, установленной на транспортном средстве, с использованием инерциального навигационного устройства в соответствии с угловой скоростью вращения и вектором ускорения мобильной измерительной платформы, установленной на транспортном средстве, относительно инерциальной системы, а затем передача информации в процессор для приема данных через сетевое кабельное соединение;
излучение сигналов электромагнитных волн из георадара в угольный пласт на кровле выработки через блок излучателя и точное вычисление данных о толщине оставшегося угля в верхней и нижней кровлях выработки полностью механизированного очистного забоя с использованием блока приемника путем обнаружения времени распространения сигналов электромагнитных волн в угольном пласте, и передачу данных в процессор для приема данных через соединение сетевого кабеля;
c) выполнение преобразования координат, слияния признаков и согласованной обработки данных, собранных посредством мобильной измерительной платформы, установленной на транспортном средстве, и пластовых сейсмографов;
d) обработку данных, собранных посредством мобильной измерительной платформы, установленной на транспортном средстве, и пластовых сейсмографов, с использованием процессора для приема данных, и формирование треугольной сетки Делоне угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке, соответственно;
e) использование треугольной сетки Делоне угольного пласта, разломов/складок и выработок, сформированной на этапе d, для построения высокоточной карты профиля треугольной сетки Делоне, вычисления топологического соотношения карты профиля и формирования топологической структуры данных карты профиля;
f) создание базы данных автоматических запросов навигационной информации полностью механизированного очистного забоя, подлежащего разработке, включающей запросы толщины угольного пласта, угла наклона угольного пласта, пространственных положений разломов/складок и пространственных положений выработок, и формирование высокоточной трехмерной навигационной карты полностью механизированного очистного забоя согласно данным, собранным посредством мобильной измерительной платформы, установленной на транспортном средстве, и пластовых сейсмографов, и согласно сформированной треугольной сетки Делоне и высокоточной карте профиля угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке.
Способ преобразования координат, слияния признаков и согласованной обработки данных, собранных посредством мобильной измерительной платформы, установленной на транспортном средстве, и пластовых сейсмографов, заключается в следующем: во-первых, формулируют идентичные и аналогичные признаки атрибутов путем категоризации и классификации собранных элементов данных и путем сопоставления атрибутов признаков в соответствии с неизменяемыми признаками полностью механизированного очистного забоя, организуют и выражают признаки атрибутов с использованием метода наименьших квадратов, и создают таблицу преобразования признаков атрибутов для устранения различий в признаках атрибутов, возникающих в результате различных критериев категоризации и классификации, и тем самым добиваются согласованности собранных данных в выражении признаков; затем объединяют признаки атрибутов собранных данных с использованием метода, основанного на сопоставлении объектов с такими же именами.
В частности, для преобразования координат используется метод преобразования координат с семью параметрами:
где (X, Y, Z)T - трехмерные координаты угольного пласта, подлежащего разработке; (X', Y', Z')T - трехмерные координаты выработки, просканированной лазером; ΔX, ΔY и ΔZ - параметры преобразования между двумя началами координат; εx, εY и εz - параметры вращения трех координатных осей; а m - параметр масштабирования.
При этом метод слияния признаков данных, собранных посредством мобильной измерительной платформы, установленной на транспортном средстве, и пластовых сейсмографов, использует по меньшей мере один из следующих методов слияния: метод параметризованного шаблона; алгоритм сжатия и кластеризации признаков; алгоритм аппроксимации методом К-ближайших соседей; искусственная нейронная сеть и метод нечеткого интеграла.
Этапы формирования треугольной сетки Делоне угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке, включают:
d1) во-первых, сортировку всех данных, участвующих в построении сети, включая данные угольного пласта, разломов/складок и выработок, сканированные лазером, и данные кровли, обнаруженные георадаром, в порядке возрастания и в последовательности: координата X, затем координата Y и затем координата Z, а затем сохранение отсортированных данных в связанном списке данных точек;
d2) создание индексов сетки данных точек в соответствии со связанным списком данных точек, управление данными точек в блоках и сохранение ограничивающих ребер в линейном связанном списке;
d3) последовательное восстановление ограничивающих ребер в качестве базовых ребер из линейного связанного списка, применение критерия максимального прилежащего угла с формированием левого треугольника и правого треугольника в качестве исходной треугольной сетки или с формированием треугольника, если ограничивающие ребра являются границами, и сохранение треугольника(-ов) в исходной треугольной сетке;
d4) использование трех ребер слоя треугольников, вновь сформированных на этапе d3, в качестве базовых ребер, и формирование новой треугольной сетки путем использования метода одноэтапного роста: восстановление базового ребра, нахождение третьей точки, которая составляет треугольник с базовой линией согласно критерию ограничивающего круга для ограниченной триангуляции Делоне, соединение двух конечных точек базовой линии с третьей точкой с формированием нового треугольника, и сохранение нового треугольника в треугольной сетке до тех пор, пока ребро расширения нового треугольника не станет граничным ребром или не будет использовано дважды;
d5) повторение этапа d4 до тех пор, пока треугольники в последнем слое не смогут быть расширены, и оптимизация всех треугольных сеток, кроме исходной треугольной сетки, с использованием алгоритма процедуры локальной оптимизации (LOP).
Этапы формирования топологической структуры данных карты профиля включают:
e1) формирование базы данных линейного связанного списка из набора линейных сегментов в треугольной сетке, сформированной на этапе d5, и инициализация кодов левой области и правой области всех линейных сегментов для проверки кодов на '-1';
e2) выбор i линейных сегментов из линейного связанного списка случайным образом с формированием многоугольника, поиск границ многоугольника и выбор следующего линейного сегмента, и продолжение этого этапа, если и код левой области, и код правой области текущего линейного сегмента не равен '-1'; завершение этого этапа и продолжение следующего этапа, если коды левой области и правой области всех линейных сегментов не равны '-1', что указывает, что был произведен поиск в левой и правой областях всех линейных сегментов; использование конечной точки или начальной точки текущего линейного сегмента в качестве текущего узла, если код левой (или правой) области текущего линейного сегмента не равен '-1', поиск следующего линейного сегмента в линейном связанном списке в направлении против часовой стрелки, установку другой конечной точки следующего линейного сегмента в качестве текущего узла и повтор поиска до тех пор, пока поиск не вернется к начальному линейному сегменту, таким образом, формируя топологическую структуру данных высокоточной карты профиля треугольной сетки Делоне.
Положительные эффекты: настоящее изобретение может предоставить высокоточную навигационную информацию для полностью механизированного горнодобывающего оборудования, что является предпосылкой и основой для реализации подземной беспилотной горной добычи, и в основном настоящее изобретение имеет следующие преимущества:
1) Настоящее изобретение может предоставить точную информацию о толщине угольного пласта, изменении угла наклона угольного пласта и пространственном положении опасных геологических структур для полностью механизированного горнодобывающего оборудования, реализовать функции высокоточного позиционирования, восприятия информации, планирования пути и т.д., и обеспечить основу для принятия решения о тестировании беспилотной горной добычи;
2) Настоящее изобретение может быстро объединять данные, собранные пластовым сейсмографом, лазерным радаром, встроенным навигационным устройством и георадаром, и автоматически формировать высокоточную трехмерную навигационную карту полностью механизированного очистного забоя;
3) Способ сбора данных в настоящем изобретении прост, удобен в использовании и эффективен, а полученные измеренные данные точны.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
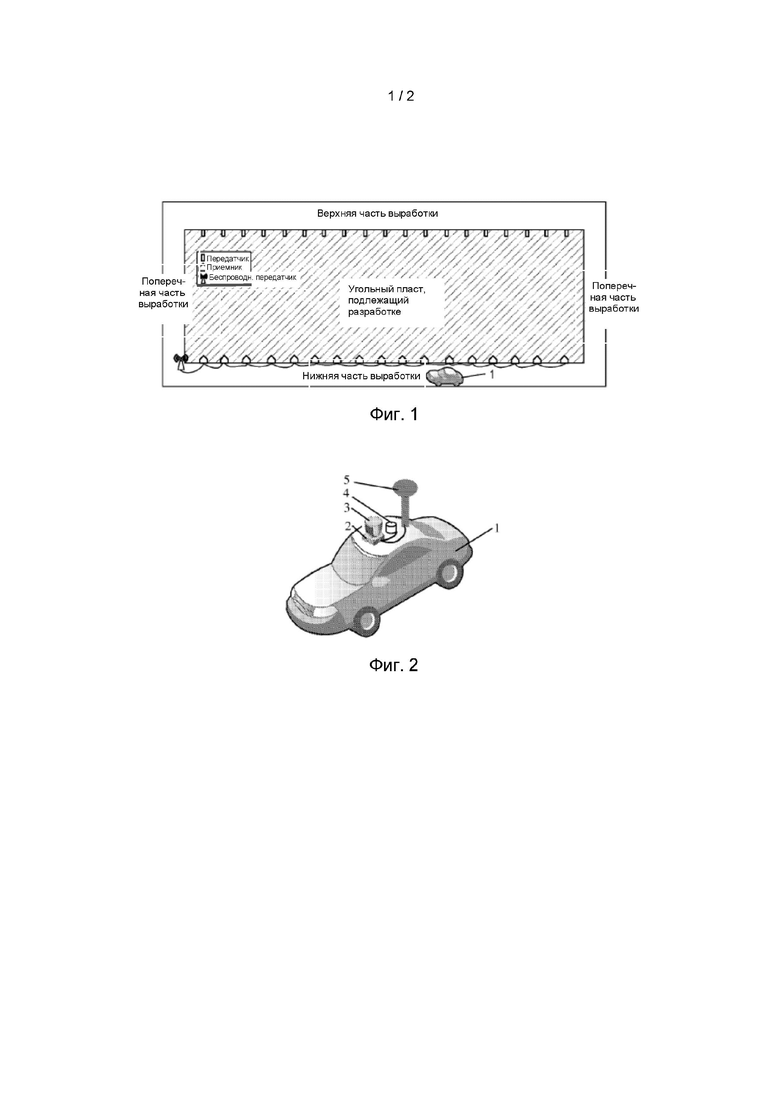
На фиг. 1 показан вид компоновки системы для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя в соответствии с настоящим изобретением.
На фиг. 2 показан вид компоновки мобильной измерительной системы, установленной на транспортном средстве, в соответствии с настоящим изобретением.
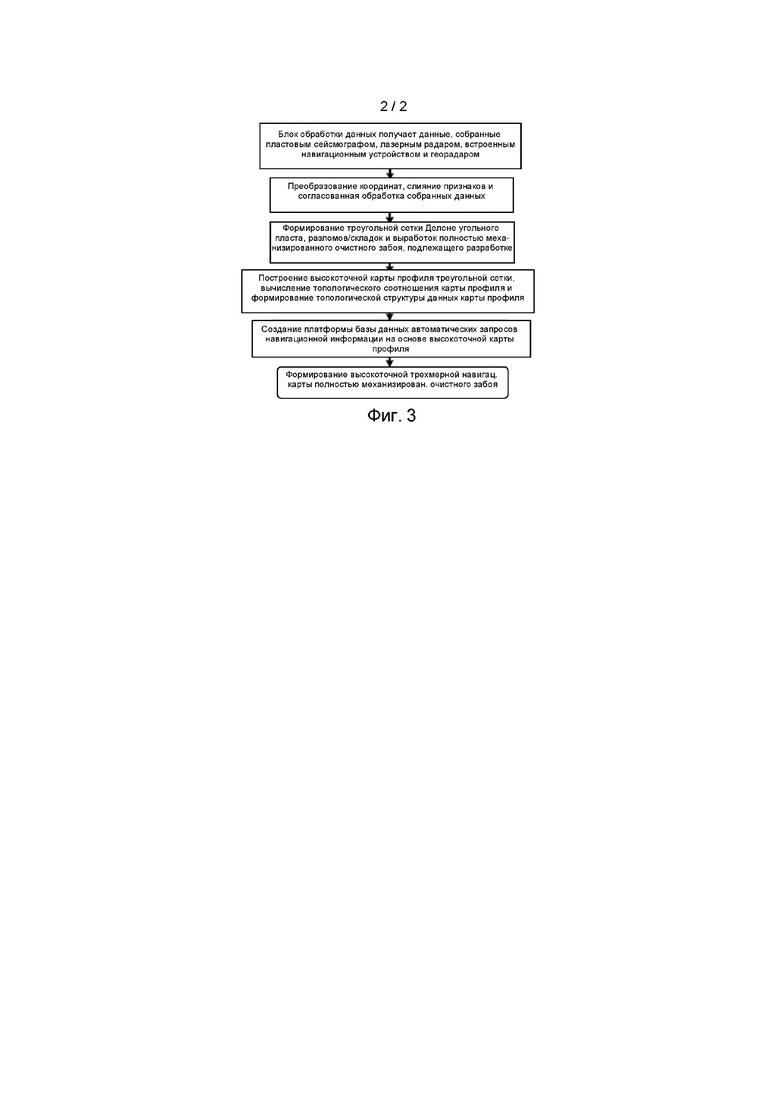
На фиг. 3 показана блок-схема способа формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя в соответствии с настоящим изобретением.
На фигурах: 1 - мобильная измерительная платформа, установленная на транспортном средстве; 2 - процессор для приема данных; 3 - лазерный радар; 4 - инерциальное навигационное устройство; 5 - георадар.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже настоящее изобретение будет дополнительно подробно описано в вариантах осуществления со ссылкой на чертежи.
Как показано на фиг. 1, система для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя в соответствии с настоящим изобретением содержит мобильную измерительную платформу 1, установленную на транспортном средстве, и пластовые сейсмографы, расположенные с двух сторон угольного пласта, подлежащего разработке, при этом пластовый сейсмограф содержит передатчики, расположенные с интервалами в верхней части выработки, и приемники, расположенные с интервалами в нижней части выработки, и приемники соединены друг с другом через сетевые кабели и соединены с беспроводным передатчиком; передатчики являются передатчиками пластовых сейсмических сигналов, а приемники являются приемниками пластовых сейсмических сигналов, причем приемники пластовых сейсмических сигналов передают данные процессору 2 для приема данных через беспроводной передатчик, а передатчики пластовых сейсмических сигналов расположены в соответствии с приемникам пластовых сейсмических сигналов для формирования последовательности обнаружения пластовых сейсмических сигналов.
Как показано на фиг. 2, мобильная измерительная платформа 1, установленная на транспортном средстве, снабжена процессором 2 для приема данных, лазерным радаром 3, инерциальным навигационным устройством 4 и георадаром 5, при этом процессор 2 для приема данных и георадар 5 закреплены над мобильной измерительной платформой 1, установленной на транспортном средстве, а лазерный радар 3 закреплен над процессором 2 для приема данных, инерциальное навигационное устройство 4 закреплено в центре мобильной измерительной платформы 1, установленной на транспортном средстве, причем лазерный радар 3, инерциальное навигационное устройство 4 и георадар 5 передают данные в процессор 2 для приема данных через сетевые кабели, а приемник пластового сейсмографа передает данные процессору 2 для приема данных через беспроводной передатчик.
Как показано на фиг. 3, способ формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя включает следующие этапы:
а) перемещение мобильной измерительной платформы 1, установленной на транспортном средстве, с постоянной скоростью около 40 км/ч по верхней части выработки, левой поперечной части выработки, нижней части выработки и правой поперечной части выработки вокруг угольного пласта, подлежащего разработке;
b) перемещение процессора 2 для приема данных в местоположение рядом с беспроводным передатчиком вместе с мобильной измерительной платформой 1, установленной на транспортном средстве с получением посредством беспроводных сигналов геологических данных угольного пласта, подлежащего разработке, собранных пластовыми сейсмографами, причем геологические данные включают информацию о толщине угольного пласта, подлежащего разработке, изменении угла наклона угольного пласта и пространственных положениях опасных геологических структур;
непрерывное излучение лазерного луча из лазерного радара 3 на поверхность кровли выработки и вычисление расстояния между поверхностью выработки и лазерным радаром в соответствии с разностью времени возврата принятого отраженного лазерного луча с формированием данных трехмерного облака точек выработки; передачу данных трехмерного облака точек от лазерного радара 3 процессору 2 для приема данных через сетевой кабель;
вычисление информации о местоположении, ориентации и траектории движения мобильной измерительной платформы 1, установленной на транспортном средстве, с использованием инерциального навигационного устройства 4 в соответствии с угловой скоростью вращения и вектором ускорения мобильной измерительной платформы 1, установленной на транспортном средстве, относительно инерциальной системы, а затем передача информации процессору 2 для приема данных через сетевое кабельное соединение;
излучение сигналов электромагнитных волн из георадара 5 в угольный пласт на кровле выработки через блок излучателя и точное вычисление данных о толщине оставшегося угля в верхней и нижней кровлях выработки полностью механизированного очистного забоя с использованием блока приемника путем обнаружения времени распространения сигналов электромагнитных волн в угольном пласте, и передача данных процессору 2 для приема данных через сетевое кабельное соединение;
c) выполнение преобразования координат, слияния признаков и согласованной обработки данных, собранных посредством мобильной измерительной платформы 1, установленной на транспортном средстве, и пластовых сейсмографов; при этом способ преобразования координат, слияния признаков и согласованной обработки данных, собранных посредством мобильной измерительной платформы 1, установленной на транспортном средстве, и пластовых сейсмографов, заключается в следующем: во-первых, формулируют идентичные и аналогичные признаки атрибутов путем категоризации и классификации собранных элементов данных и путем сопоставления атрибутов признаков в соответствии с неизменяемыми признаками полностью механизированного очистного забоя, организуют и выражают признаки атрибутов с использованием метода наименьших квадратов, и создают таблицу преобразования признаков атрибутов для устранения различий в признаках атрибутов, возникающих в результате различных критериев категоризации и классификации, и тем самым добиваются согласованности собранных данных в выражении признаков; затем объединяют признаки атрибутов собранных данных с использованием метода, основанного на сопоставлении объектов с такими же именами;
в частности, для преобразования координат используется метод преобразования координат с семью параметрами:
где (X, Y, Z)T - трехмерные координаты угольного пласта, подлежащего разработке; (X', Y', Z')T - трехмерные координаты выработки, просканированной лазером; ΔX, ΔY и ΔZ - параметры преобразования между двумя началами координат; εx, εY и εz - параметры вращения трех координатных осей; а m - параметр масштабирования;
при этом метод слияния признаков данных, собранных посредством мобильной измерительной платформы 1, установленной на транспортном средстве, и пластовых сейсмографов, использует по меньшей мере один из следующих методов слияния: метод параметризованного шаблона; алгоритм сжатия и кластеризации признаков; алгоритм аппроксимации методом К-ближайших соседей; искусственная нейронная сеть и метод нечеткого интеграла.
d) обработка данных, собранных посредством мобильной измерительной платформы 1, установленной на транспортном средстве, и пластовых сейсмографов, с использованием процессора 2 для приема данных, и формирование треугольной сетки Делоне угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке, соответственно; формирование треугольной сетки Делоне угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке, включает следующие этапы:
d1) во-первых, сортировку всех данных, участвующих в построении сети, включая данные угольного пласта, разломов/складок и выработок, сканированные лазерным радаром, и данные кровли, обнаруженные георадаром, в порядке возрастания и в последовательности: координата X, затем координата Y и затем координата Z, а затем сохранение отсортированных данных в связанном списке данных точек;
d2) создание индексов сетки данных точек в соответствии со связанным списком данных точек, управление данными точек в блоках и сохранение ограничивающих ребер в линейном связанном списке;
d3) последовательное восстановление ограничивающих ребер в качестве базовых ребер из линейного связанного списка, применение критерия максимального прилежащего угла с формированием левого треугольника и правого треугольника в качестве исходной треугольной сетки или с формированием треугольника, если ограничивающие ребра являются границами, и сохранение треугольника в исходной треугольной сетке;
d4) использование трех ребер слоя треугольников, вновь сформированных на этапе d3, в качестве базовых ребер, и формирование новой треугольной сетки путем использования метода одноэтапного роста: восстановление базового ребра, нахождение третьей точки, которая составляет треугольник с базовой линией согласно критерию ограничивающего круга для ограниченной триангуляции Делоне, соединение двух конечных точек базовой линии с третьей точкой с формированием нового треугольника, и сохранение нового треугольника в треугольной сетке до тех пор, пока ребро расширения нового треугольника не станет граничным ребром или не будет использовано дважды;
d5) повторение этапа d4 до тех пор, пока треугольники в последнем слое не смогут быть расширены, и оптимизация всех треугольных сеток, кроме исходной треугольной сетки, с использованием алгоритма процедуры локальной оптимизации (LOP);
e) использование треугольной сетки Делоне угольного пласта, разломов/складок и выработок, сформированной на этапе d, для построения высокоточной карты профиля треугольной сетки Делоне, вычисления топологического соотношения карты профиля и формирования топологической структуры данных карты профиля; причем этапы формирования топологической структуры данных карты профиля включают:
e1) формирование базы данных линейного связанного списка из набора линейных сегментов в треугольной сетке, сформированной на этапе d5, и инициализация кодов левой области и правой области всех линейных сегментов для проверки кодов на '-1';
e2) выбор i линейных сегментов из линейного связанного списка случайным образом с формированием многоугольника, поиск границ многоугольника и выбор следующего линейного сегмента, и продолжение этого этапа, если и код левой области, и код правой области текущего линейного сегмента не равен '-1'; завершение этого этапа и продолжение следующего этапа, если коды левой области и правой области всех линейных сегментов не равны '-1', что указывает, что был произведен поиск в левой и правой областях всех линейных сегментов; использование конечной точки или начальной точки текущего линейного сегмента в качестве текущего узла, если код левой (или правой) области текущего линейного сегмента не равен '-1', поиск следующего линейного сегмента в линейном связанном списке в направлении против часовой стрелки, установку другой конечной точки следующего линейного сегмента в качестве текущего узла и повтор поиска до тех пор, пока поиск не вернется к начальному линейному сегменту, формируя таким образом топологическую структуру данных высокоточной карты профиля треугольной сетки Делоне;
f) создание базы данных автоматических запросов навигационной информации полностью механизированного очистного забоя, подлежащего разработке, включающей запросы толщины угольного пласта, угла наклона угольного пласта, пространственных положений разломов/складок и пространственных положений выработок, и формирование высокоточной трехмерной навигационной карты полностью механизированного очистного забоя согласно данным, собранным посредством мобильной измерительной платформы 1, установленной на транспортном средстве, и пластовых сейсмографов, и согласно сформированной треугольной сетке Делоне и высокоточной карте профиля угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЫСОТЫ АВТОМАТИЧЕСКОЙ ВРУБОВОЙ МАШИНЫ НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ ВРУБОВОЙ МАШИНЫ И СПОСОБ ТАКОГО РЕГУЛИРОВАНИЯ | 2018 |
|
RU2707218C1 |
| СПОСОБ ОХРАНЫ ПЛАСТОВЫХ МАГИСТРАЛЬНЫХ ШТРЕКОВ | 1991 |
|
RU2046948C1 |
| СПОСОБ СОХРАНЕНИЯ ГОРНОЙ ВЫРАБОТКИ | 1996 |
|
RU2101501C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ГОРНОЙ ВЫРАБОТКИ ПРИ РАЗРАБОТКЕ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ | 1995 |
|
RU2103514C1 |
| СПОСОБ ОТРАБОТКИ КРУТЫХ ПЛАСТОВ УГЛЯ МЕХАНИЗИРОВАННЫМИ ЩИТОВЫМИ АГРЕГАТАМИ | 1991 |
|
RU2006582C1 |
| СПОСОБ РАЗРАБОТКИ МОЩНОГО ПОЛОГОГО УГОЛЬНОГО ПЛАСТА СТОЛБАМИ-КАМЕРАМИ | 2005 |
|
RU2295037C1 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
| СПОСОБ ПРОФЕССОРА КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ИСКОПАЕМЫХ КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2459078C1 |
| СПОСОБ РАЗРАБОТКИ ПОЛОГОГО УГОЛЬНОГО ПЛАСТА | 2019 |
|
RU2722910C1 |
| Способ разработки мощного пологого пласта | 1987 |
|
SU1562450A1 |
Система и способ формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя, используемые в технической области беспилотной горной добычи. Система содержит: канально-волновой сейсмометр, лазерный радар, комбинированное навигационное устройство, георадар и блок обработки данных; блок обработки данных получает данные, собранные датчиками, выполняет преобразование координат, слияние признаков и согласованную обработку собранных данных для формирования треугольной сетки Делоне угольного пласта, разлома/складки и выработки, строит высокоточную карту профиля треугольной карты, вычисляет топологическое соотношение карты профиля, формирует топологическую структуру данных карты профиля, создает платформу базы данных автоматических запросов навигационной информации на основе высокоточной карты профиля и формирует высокоточную трехмерную навигационную карту полностью механизированного очистного забоя. Высокоточная трехмерная навигационная карта, сформированная посредством настоящего изобретения, может предоставлять точную информацию о толщине угольного пласта, изменении угла залегания угольного пласта и пространственном положении опасной геологической структуры для полностью механизированного горнодобывающего оборудования и имеет такие особенности, как высокоточное позиционирование, считывание информации и планирование пути. Технический результат – обеспечение возможности построения высокоточной трехмерной навигационной карты для полностью механизированного очистного забоя. 2 н. и 3 з.п. ф-лы, 3 ил.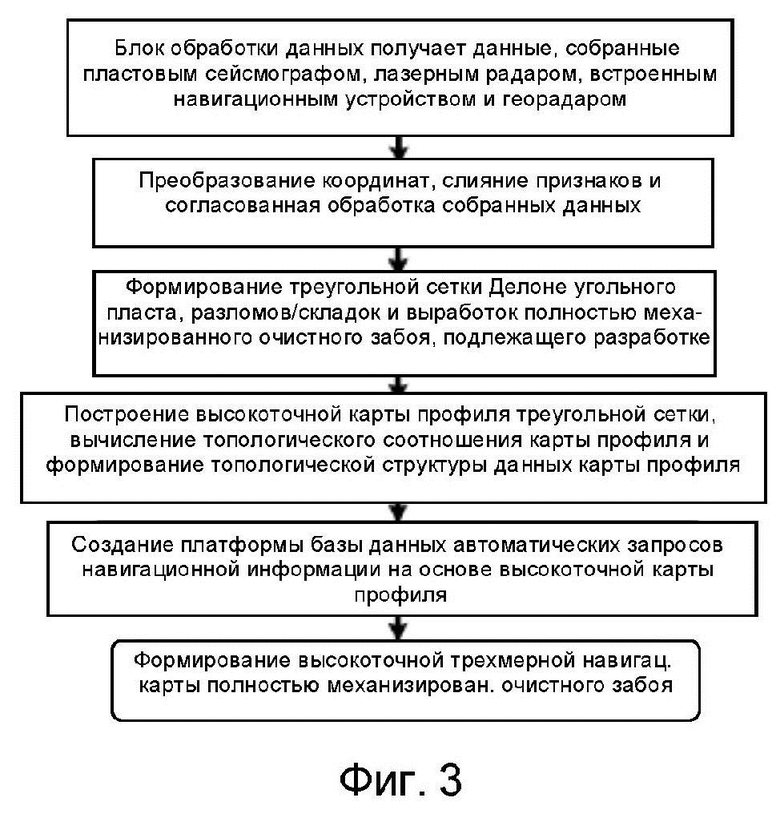
1. Система для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя, содержащая мобильную измерительную платформу (1), установленную на транспортном средстве, и пластовые сейсмографы, расположенные с двух сторон угольного пласта, подлежащего разработке, при этом пластовый сейсмограф содержит передатчики, расположенные с интервалами в верхней части выработки, и приемники, расположенные с интервалами в нижней части выработки, при этом приемники соединены друг с другом через сетевые кабели и соединены с беспроводным передатчиком;
причем мобильная измерительная платформа (1), установленная на транспортном средстве, снабжена процессором (2) для приема данных, лазерным радаром (3), инерциальным навигационным устройством (4) и георадаром (5), при этом процессор (2) для приема данных и георадар (5) закреплены над мобильной измерительной платформой (1), установленной на транспортном средстве, лазерный радар (3) закреплен над процессором (2) для приема данных, а инерциальное навигационное устройство (4) закреплено в центре мобильной измерительной платформы (1), установленной на транспортном средстве, причем лазерный радар (3), инерциальное навигационное устройство (4) и георадар (5) передают данные процессору (2) для приема данных через сетевые кабели, а приемник пластового сейсмографа передает данные процессору (2) для приема данных через беспроводной передатчик.
2. Система для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя по п. 1, в которой передатчики являются пластовыми передатчиками сейсмических сигналов, а приемники являются пластовыми приемниками сейсмических сигналов, при этом пластовые приемники сейсмических сигналов передают данные процессору (2) для приема данных через беспроводной передатчик, а пластовые передатчики сейсмических сигналов расположены в соответствии с пластовыми приемниками сейсмических сигналов для формирования последовательности обнаружения пластовых сейсмических сигналов.
3. Способ формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя с использованием системы для формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя по п. 1, включающий следующие этапы:
a) перемещение мобильной измерительной платформы (1), установленной на транспортном средстве, с постоянной скоростью около 40 км/ч по верхней части выработки, левой поперечной части выработки, нижней части выработки и правой поперечной части выработки вокруг угольного пласта, подлежащего разработке;
b) перемещение процессора (2) для приема данных в местоположение рядом с беспроводным передатчиком вместе с мобильной измерительной платформой (1), установленной на транспортном средстве, с получением посредством беспроводных сигналов геологических данных угольного пласта, подлежащего разработке, собранных пластовыми сейсмографами, причем геологические данные включают информацию о толщине угольного пласта, подлежащего разработке, изменении угла наклона угольного пласта и пространственных положениях опасных геологических структур;
непрерывное излучение лазерного луча из лазерного радара (3) на поверхность кровли выработки и вычисление расстояния между поверхностью выработки и лазерным радаром в соответствии с разностью времени возврата принятого отраженного лазерного луча с формированием данных трехмерного облака точек выработки; передача данных трехмерного облака точек от лазерного радара (3) процессору (2) для приема данных через сетевой кабель;
вычисление информации о местоположении, ориентации и траектории движения мобильной измерительной платформы (1), установленной на транспортном средстве, с использованием инерциального навигационного устройства (4) в соответствии с угловой скоростью вращения и вектором ускорения мобильной измерительной платформы (1), установленной на транспортном средстве, относительно инерциальной системы, а затем передача информации процессору (2) для приема данных через сетевое кабельное соединение;
излучение сигналов электромагнитных волн из георадара (5) в угольный пласт на кровле выработки через блок излучателя и точное вычисление данных о толщине оставшегося угля в верхней и нижней кровлях выработки полностью механизированного очистного забоя с использованием блока приемника путем обнаружения времени распространения сигналов электромагнитных волн в угольном пласте, и передача данных процессору (2) для приема данных через сетевое кабельное соединение;
c) выполнение преобразования координат, слияния признаков и согласованной обработки данных, собранных посредством мобильной измерительной платформы (1), установленной на транспортном средстве, и пластовых сейсмографов;
d) обработка данных, собранных посредством мобильной измерительной платформы (1), установленной на транспортном средстве, и пластовых сейсмографов, с использованием процессора (2) для приема данных, и формирование треугольной сетки Делоне угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке, соответственно;
e) использование треугольной сетки Делоне угольного пласта, разломов/складок и выработок, сформированной на этапе d, для построения высокоточной карты профиля треугольной сетки Делоне, вычисления топологического соотношения карты профиля и формирования топологической структуры данных карты профиля;
f) создание базы данных автоматических запросов навигационной информации полностью механизированного очистного забоя, подлежащего разработке, включающей запросы толщины угольного пласта, угла наклона угольного пласта, пространственных положений разломов/складок и пространственных положений выработок, и формирование высокоточной трехмерной навигационной карты полностью механизированного очистного забоя согласно данным, собранным посредством мобильной измерительной платформы (1), установленной на транспортном средстве, и пластовых сейсмографов, и согласно сформированной треугольной сетке Делоне и высокоточной карте профиля угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя.
4. Способ формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя по п. 3, в котором этапы формирования треугольной сетки Делоне угольного пласта, разломов/складок и выработок полностью механизированного очистного забоя, подлежащего разработке, включают:
d1) во-первых, сортировку всех данных, участвующих в построении сети, включая данные угольного пласта, разломов/складок и выработок, сканированные лазерным радаром, и данные кровли, обнаруженные георадаром, в порядке возрастания и в последовательности: координата X, затем координата Y и затем координата Z, а затем сохранение отсортированных данных в связанном списке данных точек;
d2) создание индексов сетки данных точек в соответствии со связанным списком данных точек, управление данными точек в блоках и сохранение ограничивающих ребер в линейном связанном списке;
d3) последовательное восстановление ограничивающих ребер в качестве базовых ребер из линейного связанного списка, применение критерия максимального прилежащего угла с формированием левого треугольника и правого треугольника в качестве исходной треугольной сетки или с формированием треугольника, если ограничивающие ребра являются границами, и сохранение треугольника(-ов) в исходной треугольной сетке;
d4) использование трех ребер слоя треугольников, вновь сформированных на этапе d3, в качестве базовых ребер и формирование новой треугольной сетки путем использования метода одноэтапного роста: восстановление базового ребра, нахождение третьей точки, которая составляет треугольник с базовой линией согласно критерию ограничивающего круга для ограниченной триангуляции Делоне, соединение двух конечных точек базовой линии с третьей точкой с формированием нового треугольника и сохранение нового треугольника в треугольной сетке до тех пор, пока ребро расширения нового треугольника не станет граничным ребром или не будет использовано дважды;
d5) повторение этапа d4 до тех пор, пока треугольники в последнем слое не смогут быть расширены, и оптимизация всех треугольных сеток, кроме исходной треугольной сетки, с использованием алгоритма процедуры локальной оптимизации (LOP).
5. Способ формирования высокоточной трехмерной навигационной карты полностью механизированного очистного забоя по п. 3, в котором этапы формирования топологической структуры данных карты профиля включают:
e1) формирование базы данных линейного связанного списка из набора линейных сегментов в треугольной сетке, сформированной на этапе d5, и инициализация кодов левых областей и правых областей всех линейных сегментов для проверки кодов на '-1';
e2) выбор i линейных сегментов из линейного связанного списка случайным образом с формированием многоугольника, поиск границ многоугольника, и выбор следующего линейного сегмента, и продолжение этого этапа, если и код левой области, и код правой области текущего линейного сегмента не равен '-1'; завершение этого этапа и продолжение следующего этапа, если коды левых областей и правых областей всех линейных сегментов не равны '-1', что указывает, что был произведен поиск в левых и правых областях всех линейных сегментов; использование конечной точки или начальной точки текущего линейного сегмента в качестве текущего узла, если код левых или правых областей текущего линейного сегмента не равен '-1', поиск следующего линейного сегмента в линейном связанном списке в направлении против часовой стрелки, установку другой конечной точки следующего линейного сегмента в качестве текущего узла и повтор поиска до тех пор, пока поиск не вернется к начальному линейному сегменту, формируя таким образом топологическую структуру данных высокоточной карты профиля треугольной сетки Делоне.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ СЕЙСМИЧЕСКИХ ИМПУЛЬСОВ ПРИ КАРТИРОВАНИИ ПОДЗЕМНЫХ ТРЕЩИН | 2012 |
|
RU2604104C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2015 |
|
RU2615050C2 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ ДЛЯ ПРОГНОЗА УЧАСТКОВ НЕОДНОРОДНОЙ КРОВЛИ УГОЛЬНЫХ ПЛАСТОВ | 1991 |
|
RU2021507C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

