ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области устройств для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний и способу такого регулирования, а в общем смысле - к области автоматизации горнодобывающего оборудования.
СУЩЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В Китае огромные масштабы добычи и потребления угля. Основным инструментом добычи угля является выемочный комбайн. Работы в забое обычно ведутся вручную и характеризуются высокой трудоемкостью, низкой эффективностью, крайне неблагоприятными и опасными условиями труда. Следовательно, актуальность представляет автоматизация горнодобывающего оборудования. Для автоматизации работы забоя важно решить проблему автоматического регулирования высоты комбайна. В настоящее время для автоматического регулирования высоты комбайна в основном используются способы на основе сопротивления силе вырубки, по естественным гамма-лучам, по радару, по температуре и по изображению. Наиболее распространенные способы - по сопротивлению силе вырубки и по естественным гамма-лучам. Остальные способы еще на стадии исследования. Способ на основе сопротивления силе вырубки предполагает, что у угольной породы должна быть разная шкала твердости по Протодиаконову. Способ на основе естественных гамма-лучей требует, чтобы верхняя пластина обладала достаточно большой радиоактивностью. Поэтому область применения этих способов ограничена. Существующая технология автоматической регулировки высоты комбайнов основана на определении фронта породы, ограничена по диапазону применения и имеет достаточно большую погрешность, поэтому недостаточно отвечает требованиям современной разработки.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Техническая задача
[0003] Задачей настоящего изобретения является сгладить недостатки существующего уровня техники и предложить устройство для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины и способ такого регулирования, что позволит отказаться от способа на основе идентификации фронта породы и прогнозировать параметры работы с очистным забоем. Устройство и способ надежны и экономичны и могут применяться для обустройства автоматизированного забоя.
Техническое решение
[0004] Для решения поставленной задачи в настоящем изобретении применяются следующие технические решения:
[0005] Устройство для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины, выполняющее автоматическое регулирование высоты комбайна в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна, скрепера и гидравлической крепи, при этом устройство состоит из прибора для сбора сигналов со стороны комбайна, прибора для сбора сигналов со стороны очистного забоя и модуля регулировки высоты;
[0006] Прибор для сбора сигналов со стороны комбайна включает в себя бесплатформенный инерциальный навигационный модуль II, кодировщик, датчик сейсмических колебаний и бортовую систему II; бесплатформенный инерциальный навигационный модуль II установлен на корпусе комбайна и определяет абсолютные параметры позиционирования комбайна в системе координат шахты; кодировщик установлен на колыбельном механизме для сбора данных об угле крена колыбельного механизма; датчик сейсмических колебаний закреплен на корпусе комбайна и считывает сигналы сейсмических колебаний от комбайна; бортовая система II установлена на корпусе комбайна для расчета и сохранения географических координат центральных точек верхних и нижних роликов комбайна в соответствии с абсолютными параметрами позиционирования комбайна в системе координат шахты и данными об угле крена колыбельного механизма;
[0007] Прибор для сбора сигналов со стороны очистного забоя включает в себя корпус, механизм регулировки, бесплатформенный инерциальный навигационный модуль I, трехкомпонентный сейсмограф и датчик давления; при этом корпус крепится на скрепере на тормозной башмак, трехкомпонентный сейсмограф и датчик давления крепятся на корпусе на механизм регулировки, а факт соприкосновения трехкомпонентного сейсмографа с пластом очистного забоя определяется датчиком давления; бесплатформенный инерциальный навигационный модуль I установлен на корпусе и определяет абсолютные параметры позиционирования корпуса в системе координат шахты; трехкомпонентный сейсмограф определяет сигнал сейсмических колебаний, исходящий от комбайна и отраженный волновым импедансом фронта;
[0008] модуль регулировки высоты включает в себя бортовую систему III; бортовая система III проходит взрывозащитную обработку, а затем устанавливается на комбайн; бортовая система III связана как с бортовой системой II, так и с бесплатформенным инерциальным навигационным модулем I; бортовая система III сохраняет и обрабатывает сигналы сейсмических колебаний комбайна, а также сигналы сейсмических колебаний, издаваемые комбайном и отраженные волновым импедансом фронта, абсолютные параметры позиционирования комбайна в системе координат шахты и абсолютные параметры позиционирования корпуса в системе координат шахты, строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна.
[0009] В частности, механизм регулировки в составе прибора для сбора сигналов со стороны очистного забоя включает в себя цилиндр вращения, опорную пластину и движущий цилиндр; трехкомпонентный сейсмограф и датчик давления крепятся к опорной пластине; один конец движущего цилиндра шарнирно соединен с корпусом, другой конец крепится к опорной пластине; один конец цилиндра вращения шарнирно соединен с корпусом, а другой конец шарнирно соединен с боковой поверхностью движущего цилиндра; линейное движение опорной пластины контролируется за счет удлинения и сжатия движущего цилиндра, а угол вращения опорной пластины контролируется за счет цилиндра вращения.
[0010] В частности, две группы цилиндров вращения и движущих цилиндров совместно приводят в движение опорную пластину; бортовая система I управляет удлинением и сжатием движущего цилиндра и цилиндра вращения так, что трехкомпонентный сейсмограф постоянно соприкасается с пластом очистного забоя, а регулировка отклика выполняется датчиком давления.
[0011] Способ регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины, состоящий из следующих этапов:
[0012] (a) прибор для сбора сигналов со стороны очистного забоя устанавливается в хвостовую часть скрепера и не влияет на работу комбайна в обычном режиме;
[0013] (b) перед началом разработки в автоматическом режиме первый цикл вырубки выполняется вручную;
[0014] (c) в процессе работы датчик сейсмических колебаний улавливает сейсмические колебания от комбайна, бесплатформенный инерциальный навигационный модуль II и кодировщик работают в режиме реального времени и рассчитывают абсолютные параметры позиционирования комбайна в системе координат шахты и данные угла крена колыбельного механизма, а бортовая система II рассчитывает географические координаты центральных точек верхних и нижних роликов комбайна, при этом географическая координата центральной точки верхнего ролика комбайна обозначается (xT, yT, zT), а географическая координата центральной точки нижнего ролика комбайна обозначается (xt, yt, zt);
[0015] (d) прибор для сбора сигналов со стороны очистного забоя двигается по скреперу до заданной точки и прекращает движение;
[0016] (e) угол между опорной пластиной и забоем регулируется при помощи цилиндра вращения, а расстояние между опорной пластиной и забоем - при помощи движущего цилиндра, так чтобы можно было быстро разместить трехкомпонентный сейсмограф на забое; бесплатформенный инерциальный навигационный модуль I в режиме реального времени рассчитывает абсолютные параметры позиционирования корпуса в системе координат шахты;
[0017] (f) трехкомпонентный сейсмограф, соприкасающийся с пластом очистного забоя, улавливает сигнал сейсмических колебаний, отправленный комбайном и отраженный волновым импедансом фронта; бортовая система III выполняет обработку сигнала сейсмической волны, т.е. убирает шум, выполняет нормализацию, продольное и поперечное разделение волны, анализ скорости или смещения глубины сигнала сейсмических колебаний от комбайна и сигнала сейсмических колебаний, отправленного комбайном и отраженного волновым импедансом фронта, и строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя, заранее определяет распределение породы на глубине выемки для следующего цикла вырубки и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна исходя из абсолютных параметров позиционирования комбайна в системе координат шахты и абсолютных параметров позиционирования корпуса в системе координат шахты;
[0018] (g) движущий цилиндр и цилиндр вращения регулируются таким образом, чтобы оторвать трехкомпонентный сейсмограф от забоя, а опорная пластина возвращается в исходное положение; прибор для сбора сигналов со стороны очистного забоя двигается на заданное расстояние в направлении движения комбайна и останавливается; этапы (e)-(f) повторяются до тех пор, пока не будет построена трехмерная геологическая модель очистного забоя для следующего цикла вырубки; прибор для сбора сигналов со стороны очистного забоя двигается обратно к хвостовой части скрепера и останавливается;
[0019] (h) после того, как комбайн закончит вырубку, вперед выдвигается гидравлическая крепь и выполняется новый цикл вырубки; модуль регулировки высоты берет кривую верхней пластины и кривую нижней пластины из трехмерной геологической модели для следующего рабочего забоя и выполняет пробное моделирование через равные промежутки, в результате получается последовательность значений подъема верхней и нижней пластины (ZD1, ZD2, ZD3, …, ZDn) и (Zd1, Zd2, Zd3, …, Zdn), затем модуль сравнивает значения подъема с соответствующими значениями подъема ZT и Zt для центральных точек верхних и нижних роликов комбайна, определяет и изменяет высоту верхних и нижних роликов комбайна и задает порог δ; если ZDi-ZT≤δ, то верхний ролик опускается, для всех остальных значений верхний ролик поднимается; если Zdi-Zt≤δ, нижний ролик поднимается, для всех остальных значений нижний ролик опускается;
[0020] (i) этапы (c)-(h) повторяются в рамках завершения автоматического цикла разработки забоя.
Полезный эффект
[0021] Согласно описанию устройства для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины и способа такого регулирования, строится модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя, по которой автоматически регулируется высота, поэтому этот способ отличается высокой надежностью и точностью, а от регулировки высоты исходя из идентификации породы можно отказаться. В качестве сигнала сейсмических колебаний используется сигнал от комбайна, поэтому способ не требует дополнительного активного источника сейсмических колебаний (полученного путем взрыва или ударного воздействия) и является экономически эффективным. Настоящее изобретение может применяться вместе со способом регулировки высоты на основе идентификации породы, что позволит увеличить точность и надежность и вести работу в режиме реального времени.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
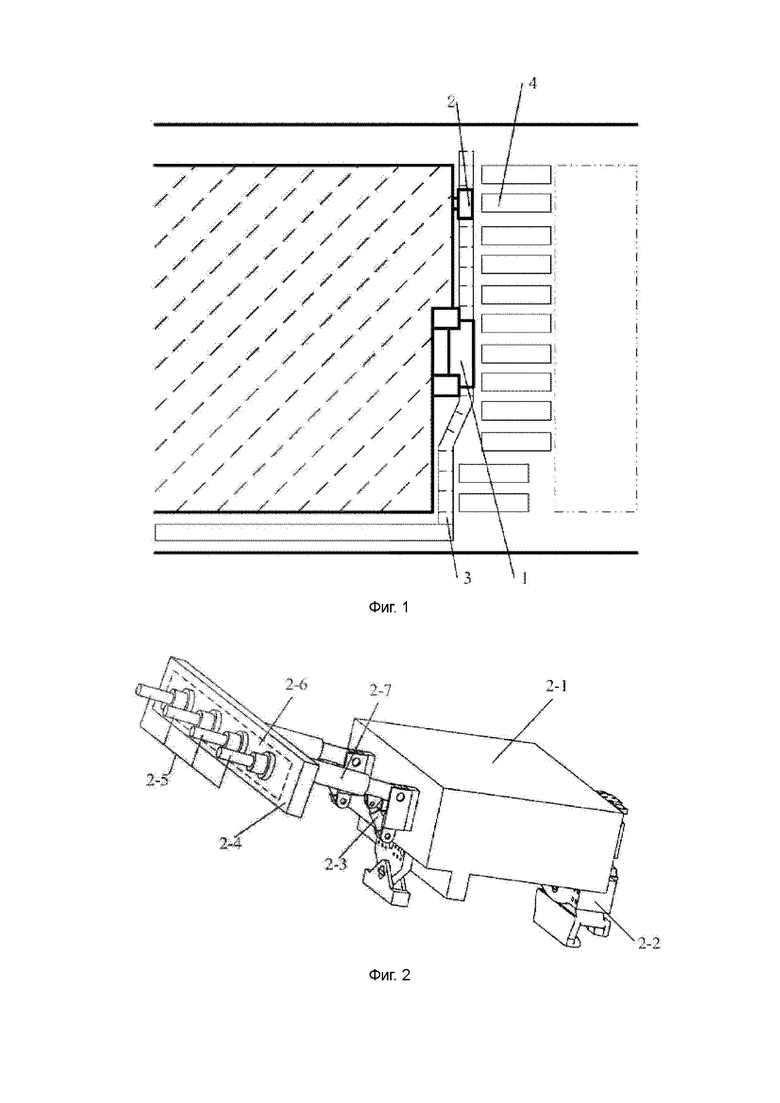
[0022] Фигура 1 - схематическое представление забоя, где работает устройство для автоматической регулировки высоты врубовой машины согласно настоящему изобретению;
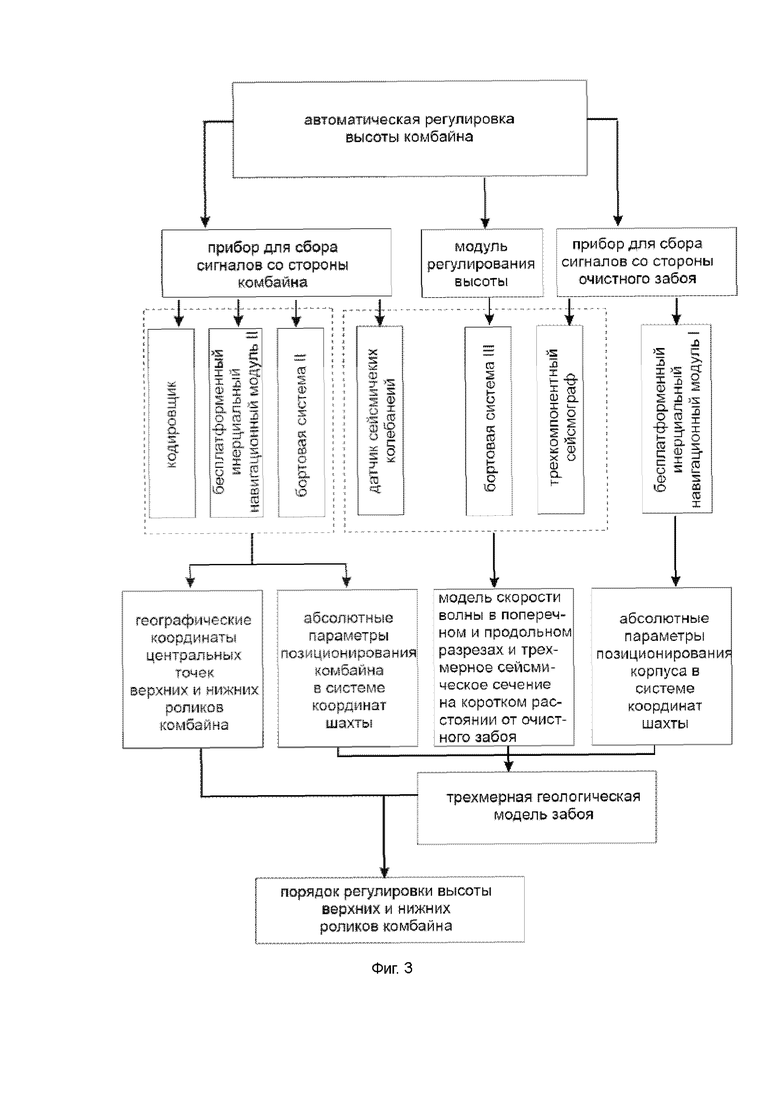
[0023] Фигура 2 - схематическое представление прибор для сбора сигналов со стороны очистного забоя согласно настоящему изобретению;
[0024] Фигура 3 - конструктивная и функциональная блок-схема устройства согласно настоящему изобретению.
[0025] На чертежах: 1, комбайн; 2, прибор для сбора сигналов со стороны очистного забоя; 2-1, корпус; 2-2, тормозной башмак; 2-3, цилиндр вращения; 2-4, опорная пластина; 2-5, трехкомпонентный сейсмограф; 2-6, датчик давления; 2-7, движущий цилиндр; 3, скрепел, 4, гидравлическая крепь.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0026] Ниже приводится описание изобретения со ссылкой на прилагаемые чертежи.
[0027] Фигура 1 - схематическое представление забоя, где работает устройство для автоматической регулировки высоты врубовой машины согласно настоящему изобретению. Устройство для регулирования высоты врубовой машины на основе определения сейсмических колебаний врубовой машины выполняет автоматическое регулирование высоты комбайна 1 в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна 1, скрепера 3 и гидравлической крепи 4, при этом устройство состоит из прибора для сбора сигналов со стороны комбайна, прибора для сбора сигналов со стороны очистного забоя 2 и модуля регулировки высоты.
[0028] Прибор для сбора сигналов со стороны комбайна включает в себя бесплатформенный инерциальный навигационный модуль II, кодировщик, датчик сейсмических колебаний и бортовую систему II; бесплатформенный инерциальный навигационный модуль II установлен на корпусе комбайна 1 и определяет абсолютные параметры позиционирования комбайна 1 в системе координат шахты; кодировщик установлен на колыбельном механизме для сбора данных об угле крена колыбельного механизма; датчик сейсмических колебаний закреплен на корпусе комбайна 1 и считывает сигналы сейсмических колебаний от комбайна; бортовая система II установлена на корпусе комбайна 1 для расчета и сохранения географических координат центральных точек верхних и нижних роликов комбайна в соответствии с абсолютными параметрами позиционирования комбайна в системе координат шахты и данными об угле крена колыбельного механизма.
[0029] Прибор для сбора сигналов со стороны очистного забоя 2, как показано на Фигуре 2, включает в себя корпус 2-1, механизм регулировки, бесплатформенный инерциальный навигационный модуль I, трехкомпонентный сейсмограф 2-5 и датчик давления 2-6; при этом корпус 2-1 крепится на скрепере 3 на тормозной башмак 2-2, трехкомпонентный сейсмограф 2-5 и датчик давления 2-6 крепятся на корпусе 2-1 на механизм регулировки, а факт соприкосновения трехкомпонентного сейсмографа 2-5 с пластом очистного забоя определяется датчиком давления 2-6; бесплатформенный инерциальный навигационный модуль I установлен на корпусе 2-1 и определяет абсолютные параметры позиционирования корпуса 2-1 в системе координат шахты; трехкомпонентный сейсмограф 2-5 определяет сигнал сейсмических колебаний, исходящий от комбайна 1 и отраженный волновым импедансом фронта, механизм регулировки в составе прибора для сбора сигналов со стороны очистного забоя 2 включает в себя цилиндр вращения 2-3, опорную пластину 2-4 и движущий цилиндр 2-7; трехкомпонентный сейсмограф 2-5 и датчик давления 2-6 крепятся к опорной пластине 2-4; один конец движущего цилиндра 2-7 шарнирно соединен с корпусом 2-1, другой конец крепится к опорной пластине 2-4; один конец цилиндра вращения 2-3 шарнирно соединен с корпусом 2-1, а другой конец шарнирно соединен с боковой поверхностью движущего цилиндра 2-7; линейное движение опорной пластины 2-4 контролируется за счет удлинения и сжатия движущего цилиндра 2-7, а угол вращения опорной пластины 2-4 контролируется за счет цилиндра вращения 2-3. Две группы цилиндров вращения 2-3 и движущих цилиндров 2-7 совместно приводят в движение опорную пластину 2-3; бортовая система I управляет удлинением и сжатием движущего цилиндра 2-7 и цилиндра вращения 2-3 так, что трехкомпонентный сейсмограф 2-5 постоянно соприкасается с пластом очистного забоя, а регулировка отклика выполняется датчиком давления 2-6.
[0030] модуль регулировки высоты включает в себя бортовую систему III; бортовая система III проходит взрывозащитную обработку, а затем устанавливается на комбайн 1; бортовая система III связана как с бортовой системой II, так и с бесплатформенным инерциальным навигационным модулем I; бортовая система III сохраняет и обрабатывает сигналы сейсмических колебаний комбайна 1, а также сигналы сейсмических колебаний, издаваемые комбайном 1 и отраженные волновым импедансом фронта, абсолютные параметры позиционирования комбайна 1 в системе координат шахты и абсолютные параметры позиционирования корпуса 2-1 в системе координат шахты, строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна.
[0031] Способ регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины, как показано на Фигуре 3, состоит из следующих этапов:
[0032] (a) прибор для сбора сигналов со стороны очистного забоя 2 устанавливается в хвостовую часть скрепера 3 и не влияет на работу комбайна 1 в обычном режиме;
[0033] (b) перед началом разработки в автоматическом режиме первый цикл вырубки выполняется вручную;
[0034] (c) в процессе работы датчик сейсмических колебаний улавливает сейсмические колебания от комбайна 1, бесплатформенный инерциальный навигационный модуль II и кодировщик работают в режиме реального времени и рассчитывают абсолютные параметры позиционирования комбайна 1 в системе координат шахты и данные угла крена колыбельного механизма, а бортовая система II рассчитывает географические координаты центральных точек верхних и нижних роликов комбайна, при этом географическая координата центральной точки верхнего ролика комбайна обозначается (xT, yT, zT), а географическая координата центральной точки нижнего ролика комбайна обозначается (xt, yt, zt);
[0035] (d) прибор для сбора сигналов со стороны очистного забоя 2 двигается по скреперу 3 до заданной точки и прекращает движение;
[0036] (e) угол между опорной пластиной 2-4 и забоем регулируется при помощи цилиндра вращения 2-3, а расстояние между опорной пластиной 2-4 и забоем - при помощи движущего цилиндра 2-7, так чтобы можно было быстро разместить трехкомпонентный сейсмограф 2-5 на забое; бесплатформенный инерциальный навигационный модуль I в режиме реального времени рассчитывает абсолютные параметры позиционирования корпуса 2-1 в системе координат шахты;
[0037] (f) трехкомпонентный сейсмограф 2-5, соприкасающийся с пластом очистного забоя, улавливает сигнал сейсмических колебаний, отправленный комбайном 1 и отраженный волновым импедансом фронта; бортовая система III выполняет обработку сигнала сейсмической волны, т.е. убирает шум, выполняет нормализацию, продольное и поперечное разделение волны, анализ скорости или смещения глубины сигнала сейсмических колебаний от комбайна 1 и сигнала сейсмических колебаний, отправленного комбайном 1 и отраженного волновым импедансом фронта, и строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя, заранее определяет распределение породы на глубине выемки для следующего цикла вырубки и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна исходя из абсолютных параметров позиционирования комбайна 1 в системе координат шахты и абсолютных параметров позиционирования корпуса 2-1 в системе координат шахты;
[0038] (g) движущий цилиндр 2-7 и цилиндр вращения 2-3 регулируются таким образом, чтобы оторвать трехкомпонентный сейсмограф 2-5 от забоя, а опорная пластина 2-4 возвращается в исходное положение; прибор для сбора сигналов со стороны очистного забоя 2 двигается на заданное расстояние в направлении движения комбайна 1 и останавливается; этапы (e)-(f) повторяются до тех пор, пока не будет построена трехмерная геологическая модель очистного забоя для следующего цикла вырубки; прибор для сбора сигналов со стороны очистного забоя 2 двигается обратно к хвостовой части скрепера 3 и останавливается;
[0039] (h) после того, как комбайн 1 закончит вырубку, вперед выдвигается гидравлическая крепь 4 и выполняется новый цикл вырубки; модуль регулировки высоты берет кривую верхней пластины и кривую нижней пластины из трехмерной геологической модели для следующего рабочего забоя и выполняет пробное моделирование через равные промежутки, в результате получается последовательность значений подъема верхней и нижней пластины (ZD1, ZD2, ZD3, …, ZDn) и (Zd1, Zd2, Zd3, …, Zdn), затем модуль сравнивает значения подъема с соответствующими значениями подъема ZT и Zt для центральных точек верхних и нижних роликов комбайна, определяет и изменяет высоту верхних и нижних роликов комбайна и задает порог δ; если ZDi-ZT≤δ, то верхний ролик опускается, для всех остальных значений верхний ролик поднимается; если Zdi-Zt≤δ, нижний ролик поднимается, для всех остальных значений нижний ролик опускается;
[0040] (i) этапы (c)-(h) повторяются в рамках завершения автоматического цикла разработки забоя.
[0041] Выше приводится предпочтительный вариант осуществления изобретения. В варианты осуществления настоящего изобретения специалисты могут вносить различные изменения и улучшения, а любые представленные здесь описания не могут считаться ограничивающими смысл настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ УГЛЕДОБЫВАЮЩЕЙ МАШИНЫ | 2018 |
|
RU2711418C1 |
| СИСТЕМА И СПОСОБ НАЧАЛЬНОЙ ВЫСТАВКИ ПО МЕТОДУ ОПТИЧЕСКОГО ПОТОКА ДЛЯ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ УГЛЕДОБЫВАЮЩЕГО КОМБАЙНА | 2018 |
|
RU2734387C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ВРУБОВОЙ МАШИНЫ И СПОСОБ УПРАВЛЕНИЯ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ И ВЗАИМОДЕЙСТВИЯ ДАТЧИКОВ | 2017 |
|
RU2681006C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ЭКСКАВАТОРА И СПОСОБ СТРОИТЕЛЬСТВА ПОДЗЕМНОГО ПРОХОДА КРИВОЛИНЕЙНОГО ПРОФИЛЯ | 2018 |
|
RU2699091C1 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ВЫСОКОТОЧНОЙ ТРЕХМЕРНОЙ НАВИГАЦИОННОЙ КАРТЫ ПОЛНОСТЬЮ МЕХАНИЗИРОВАННОГО ОЧИСТНОГО ЗАБОЯ | 2019 |
|
RU2780305C1 |
| СПОСОБ КОНТРОЛИРОВАНИЯ ПОЗИЦИИ ВРУБОВОЙ МАШИНЫ В ДЛИННОМ ЗАБОЕ НА ОСНОВЕ ГЕОИНФОРМАЦИОННОЙ СИСТЕМЫ УГОЛЬНОГО ПЛАСТА | 2017 |
|
RU2681007C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
| СПОСОБ ШАХТНОЙ РАЗРАБОТКИ УГЛЯ, ОСНОВАННЫЙ НА КОНТРОЛЕ ВЫПОЛНЕНИЯ РАБОТ ПО ОЧИСТНОЙ ВЫЕМКЕ, ОТДЕЛЕНИЮ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ОТ МАССИВА И ЗАКЛАДКЕ ВЫРАБОТАННОГО ПРОСТРАНСТВА | 2019 |
|
RU2720029C1 |
| ГОРНАЯ МАШИНА С МНОЖЕСТВОМ ВРУБОВЫХ ГОЛОВОК | 2017 |
|
RU2749518C2 |
Группа изобретений относится к устройству для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины и способу такого регулирования. Устройство состоит из прибора для сбора сигналов со стороны комбайна, прибора для сбора сигналов со стороны очистного забоя и модуля регулировки высоты. Прибор для сбора сигналов со стороны комбайна получает от комбайна сигналы о сейсмических колебаниях и рассчитывает абсолютные параметры позиционирования комбайна в системе координат шахты и географические координаты центральных точек верхних и нижних роликов комбайна. Прибор для сбора сигналов со стороны очистного забоя получает сигнал о сейсмических колебаниях, посылаемый комбайном, и рассчитывает абсолютные параметры позиционирования корпуса в системе координат шахты. Модуль регулировки высоты включает в себя бортовую систему, которая связана с другой бортовой системой, а также с бесплатформенным инерциальным навигационным модулем. Бортовая система сохраняет и обрабатывает сигналы сейсмических колебаний комбайна, абсолютные параметры позиционирования комбайна в системе координат шахты и абсолютные параметры позиционирования корпуса в системе координат шахты, строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна. Технический результат заключается в повышении надежности и точности регулирования высоты автоматической врубовой машины. 2 н. и 2 з.п. ф-лы, 3 ил.
1. Устройство для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины, выполняющее автоматическое регулирование высоты комбайна (1) в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна (1), скрепера (3) и гидравлической крепи (4), при этом устройство состоит из прибора для сбора сигналов со стороны комбайна, прибора для сбора сигналов со стороны очистного забоя (2) и модуля регулировки высоты;
прибор для сбора сигналов со стороны комбайна включает в себя бесплатформенный инерциальный навигационный модуль II, кодировщик, датчик сейсмических колебаний и бортовую систему II; бесплатформенный инерциальный навигационный модуль II установлен на корпусе комбайна (1) и определяет абсолютные параметры позиционирования комбайна (1) в системе координат шахты; кодировщик установлен на колыбельном механизме для сбора данных об угле крена колыбельного механизма; датчик сейсмических колебаний закреплен на корпусе комбайна (1) и считывает сигналы сейсмических колебаний от комбайна; бортовая система II установлена на корпусе комбайна (1) для расчета и сохранения географических координат центральных точек верхних и нижних роликов комбайна в соответствии с абсолютными параметрами позиционирования комбайна в системе координат шахты и данными об угле крена колыбельного механизма;
прибор для сбора сигналов со стороны очистного забоя (2) включает в себя корпус (2-1), механизм регулировки, бесплатформенный инерциальный навигационный модуль I, трехкомпонентный сейсмограф (2-5) и датчик давления (2-6); при этом корпус (2-1) крепится на скрепере (3) на тормозной башмак (2-2), трехкомпонентный сейсмограф (2-5) и датчик давления (2-6) крепятся на корпусе (2-1) на механизм регулировки, а факт соприкосновения трехкомпонентного сейсмографа (2-5) с пластом очистного забоя определяется датчиком давления (2-6); бесплатформенный инерциальный навигационный модуль I установлен на корпусе (2-1) и определяет абсолютные параметры позиционирования корпуса (2-1) в системе координат шахты; трехкомпонентный сейсмограф (2-5) определяет сигнал сейсмических колебаний, исходящий от комбайна (1) и отраженный волновым импедансом фронта;
модуль регулировки высоты включает в себя бортовую систему III; бортовая система III проходит взрывозащитную обработку, а затем устанавливается на комбайн (1); бортовая система III связана как с бортовой системой II, так и с бесплатформенным инерциальным навигационным модулем I; бортовая система III сохраняет и обрабатывает сигналы сейсмических колебаний комбайна (1), а также сигналы сейсмических колебаний, издаваемые комбайном (1) и отраженные волновым импедансом фронта, абсолютные параметры позиционирования комбайна (1) в системе координат шахты и абсолютные параметры позиционирования корпуса (2-1) в системе координат шахты, строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна.
2. Устройство для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины согласно п. 1, отличающееся тем, что механизм регулировки в составе прибора для сбора сигналов со стороны очистного забоя (2) включает в себя цилиндр вращения (2-3), опорную пластину (2-4) и движущий цилиндр (2-7); трехкомпонентный сейсмограф (2-5) и датчик давления (2-6) крепятся к опорной пластине (2-4); один конец движущего цилиндра (2-7) шарнирно соединен с корпусом (2-1), другой конец крепится к опорной пластине (2-4); один конец цилиндра вращения (2-3) шарнирно соединен с корпусом (2-1), а другой конец шарнирно соединен с боковой поверхностью движущего цилиндра (2-7); линейное движение опорной пластины (2-4) контролируется за счет удлинения и сжатия движущего цилиндра (2-7), а угол вращения опорной пластины (2-4) контролируется за счет цилиндра вращения (2-3).
3. Устройство для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины согласно п. 2, отличающееся тем, что две группы цилиндров вращения (2-3) и движущих цилиндров (2-7) совместно приводят в движение опорную пластину (2-3); бортовая система I управляет удлинением и сжатием движущего цилиндра (2-7) и цилиндра вращения (2-3) так, что трехкомпонентный сейсмограф (2-5) постоянно соприкасается с пластом очистного забоя, а регулировка отклика выполняется датчиком давления (2-6).
4. Способ регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины, характеризующийся тем, что он состоит из следующих этапов:
(a) прибор для сбора сигналов со стороны очистного забоя (2) устанавливается в хвостовую часть скрепера (3) и не влияет на работу комбайна (1) в обычном режиме;
(b) перед началом разработки в автоматическом режиме первый цикл вырубки выполняется вручную;
(c) в процессе работы датчик сейсмических колебаний улавливает сейсмические колебания от комбайна (1), бесплатформенный инерциальный навигационный модуль II и кодировщик работают в режиме реального времени и рассчитывают абсолютные параметры позиционирования комбайна (1) в системе координат шахты и данные угла крена колыбельного механизма, а бортовая система II рассчитывает географические координаты центральных точек верхних и нижних роликов комбайна, при этом географическая координата центральной точки верхнего ролика комбайна обозначается (xT, yT, zT), а географическая координата центральной точки нижнего ролика комбайна обозначается (xt, yt, zt);
(d) прибор для сбора сигналов со стороны очистного забоя (2) двигается по скреперу (3) до заданной точки и прекращает движение;
(e) угол между опорной пластиной (2-4) и забоем регулируется при помощи цилиндра вращения (2-3), а расстояние между опорной пластиной (2-4) и забоем - при помощи движущего цилиндра (2-7), так чтобы можно было быстро разместить трехкомпонентный сейсмограф (2-5) на забое; бесплатформенный инерциальный навигационный модуль I в режиме реального времени рассчитывает абсолютные параметры позиционирования корпуса (2-1) в системе координат шахты;
(f) трехкомпонентный сейсмограф (2-5), соприкасающийся с пластом очистного забоя, улавливает сигнал сейсмических колебаний, отправленный комбайном (1) и отраженный волновым импедансом фронта; бортовая система III выполняет обработку сигнала сейсмической волны, т.е. убирает шум, выполняет нормализацию, продольное и поперечное разделение волны, анализ скорости или смещения глубины сигнала сейсмических колебаний от комбайна (1) и сигнала сейсмических колебаний, отправленного комбайном (1) и отраженного волновым импедансом фронта, и строит модель скорости волны в поперечном и продольном разрезах и трехмерное сейсмическое сечение на коротком расстоянии от очистного забоя, заранее определяет распределение породы на глубине выемки для следующего цикла вырубки и постоянно обновляет трехмерную геологическую модель рабочего забоя для следующего цикла вырубки для автоматической регулировки высоты верхних и нижних роликов комбайна исходя из абсолютных параметров позиционирования комбайна (1) в системе координат шахты и абсолютных параметров позиционирования корпуса (2-1) в системе координат шахты;
(g) движущий цилиндр (2-7) и цилиндр вращения (2-3) регулируются таким образом, чтобы оторвать трехкомпонентный сейсмограф (2-5) от забоя, а опорная пластина (2-4) возвращается в исходное положение; прибор для сбора сигналов со стороны очистного забоя (2) двигается на заданное расстояние в направлении движения комбайна (1) и останавливается; этапы (e)-(f) повторяются до тех пор, пока не будет построена трехмерная геологическая модель очистного забоя для следующего цикла вырубки; прибор для сбора сигналов со стороны очистного забоя (2) двигается обратно к хвостовой части скрепера (3) и останавливается;
(h) после того как комбайн (1) закончит вырубку, вперед выдвигается гидравлическая крепь (4) и выполняется новый цикл вырубки; модуль регулировки высоты берет кривую верхней пластины и кривую нижней пластины из трехмерной геологической модели для следующего рабочего забоя и выполняет пробное моделирование через равные промежутки, в результате получается последовательность значений подъема верхней и нижней пластины (ZD1, ZD2, ZD3, …, ZDn) и (Zd1, Zd2, Zd3, …, Zdn), затем модуль сравнивает значения подъема с соответствующими значениями подъема ZT и Zt для центральных точек верхних и нижних роликов комбайна, определяет и изменяет высоту верхних и нижних роликов комбайна и задает порог δ; если ZDi-ZT≤δ, то верхний ролик опускается, для всех остальных значений верхний ролик поднимается; если Zdi-Zt≤δ, нижний ролик поднимается, для всех остальных значений нижний ролик опускается;
(i) этапы (c)-(h) повторяются в рамках завершения автоматического цикла разработки забоя.
| СПОСОБ ПОЛУЧЕНИЯ ПРИЗАБОЙНОГО ПРОСТРАНСТВА С ПРИМЕНЕНИЕМ СИСТЕМ АВТОМАТИЗАЦИИ | 2009 |
|
RU2505677C2 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ ИЗМЕНЕНИЙ КОНЦЕНТРАЦИИ НАПРЯЖЕНИЙ ВПЕРЕДИ ФРОНТА ОЧИСТНОЙ ЛАВЫ | 2014 |
|
RU2604532C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗАДНИМ БАРАБАНОМ ОЧИСТНОГО КОМБАЙНА ДВУСТОРОННЕГО ДЕЙСТВИЯ (ВАРИАНТЫ) | 2010 |
|
RU2556541C2 |
| ВРУБОВАЯ УСТАНОВКА И СПОСОБ ЕЕ РАБОТЫ | 2010 |
|
RU2537449C2 |
| US 6219301 B1, 17.04.2001 | |||
| CN 103883326 A, 25.06.2014 | |||
| CN 104481534 A, 01.04.2015. | |||

